Abstract
Gait quality can influence walking ability and mobility outcomes making it an important part of prosthetic rehabilitation. Prosthetic knee joint designs can influence gait quality, and limited data exists to guide component selection in under-resourced settings. This study compared spatiotemporal and kinematic gait parameters for two common types of friction-based swing-phase controlled prosthetic knee joints. Two-dimensional optical gait analysis was conducted as part of a cross-over study design involving 17 individuals with unilateral transfemoral amputations. Two prosthetic knee joints were compared. One utilized constant-friction (CF) and the other a variable cadence controller (VCC) for swing-phase control. Gait was analyzed at normal and fast walking speeds. Primary gait parameters included swing-phase time, step length, and knee flexion. Swing-phase time and peak knee flexion angles, as well as their related symmetry indices, were lower for the VCC compared to the CF (p < 0.01), by 11.1 to 94.1%. The VCC resulted in faster walking speeds by approximately 15% compared to the CF (p = 0.002). Friction-based swing-phase knee control mechanisms can facilitate an appropriate and cost-effective prosthetic knee joint solution in under-resourced settings. The findings suggest that friction-based mechanism can be designed to improve gait quality, and in turn overall walking performance.
Keywords:
amputee; knee; developing country; gait analysis; prosthetic; swing-phase; swing-phase control 1. Introduction
The primary goal of lower-limb prosthetic rehabilitation is to re-establish gait and restore mobility. This is typically achieved via therapy and prescription of a prosthesis. In the case of transfemoral (TF) amputation, the prosthesis includes a prosthetic knee joint which facilitates important tasks such as sitting and walking. During typical walking gait, the knee joint provides articulation in the swing phase, while keeping the knee joint rigid through the stance phase to ensure an extended and stable limb during weight-bearing activity. A variety of knee joint mechanisms are employed clinically to achieve these functions, with varying levels of performance. Technologically advanced prosthetic knees have been shown to improve mobility outcomes via increased walking speeds and more normal movement patterns compared to simpler mechanical components [1,2]. This is important, since ambulation of individuals with TF is commonly characterized by abnormal movements which can be associated with slower, laborious gait and potential long-term musculoskeletal problems [3,4,5,6,7]. Prosthetic rehabilitation outcomes are further influenced by factors such as the cause and level of amputation, age, and comorbidity [8].
In low- and middle-income countries (LMIC), simple mechanical prosthetic knee joints provide an affordable, durable and context-appropriate solution; however, this comes at the price of reduced performance compared to more advanced technologies commonly used in high-income countries [9,10,11]. Specifically, LMIC-relevant knee joint technologies typically comprise simple constant friction (CF) mechanisms (in some cases with a spring to promote knee extension) to control and attenuate articulation during swing-phase, thus producing more natural knee flexion and extension movements. However, CF knee joints can only achieve this at a singular walking speed, and faster gait typically results in gait deviations such as excessive swing time and heel rise (i.e., knee flexion) [12,13]. For this reason, CF knee joints are typically only prescribed for limited ambulators and elderly populations in high-income countries. Higher levels of mobility are possible via advanced prosthetic knee joint designs, such as hydraulic knees; however, these are too costly, complex and inappropriate for general use in most LMICs.
LMIC appropriate solutions have been sought that aim to improve performance while preserving LMIC appropriateness; these typically comprise simple mechanical components such as dampeners and springs. For example, the optimization of frictional damping and extension assist springs has been demonstrated in highly controlled experiments to improve swing-phase kinematics [13]. Aspects of this work ultimately led to the development of the variable cadence controller (VCC), which consists of an optimized spring in combination with a variable friction mechanism. Hence, in contrast to CF knees, the VCC has the potential to enable more natural gait patterns over a broader range of walking speeds [14]. However, to date, no formal studies have compared the gait quality of the VCC to conventional CF mechanisms. Such data could aid in elucidating the extent to which the VCC influences gait performance, and hence the potential improvements (or detriments) to gait and mobility.
The primary aim of this study was to introduce the VCC design and assess relevant spatiotemporal and kinematic gait parameters associated with swing-phase control and to compare the VCC to CF knees relevant to LMICs. It was hypothesized that the VCC would result in more symmetrical swing times, step lengths as well as reduced heel-rise (swing-phase knee flexion excursions) across different walking speeds. Secondarily, the anticipated improvements in swing-phase control were expected to improve overall walking capacity, including walking speed.
2. Methods
This study was conducted at a prosthetic facility located in Cambodia. The chosen testing location enabled access to the prosthetic components of interest (constant friction knees) used by the relevant populations (younger, highly ambulatory users). The facility was also part of a funded monitoring and evaluation project involving the deployment of knee joints using the VCC, thus allowing for a comparison of technologies. Finally, the facility had a well-established prosthetic program (providing clinical and technical services) along with some previous experience in clinical research.
2.1. Prosthetic Knee Joints
The All-Terrain knee or ATK (Legworks, Inc., Toronto, ON, Canada) has an automatically operated stance-phase lock and the VCC for swing-phase (Figure 1 and Figure 2). The ATK is available in high-income markets and close to 20 LMICs. Studies have been conducted with the ATK to assess function, biomechanics and user satisfaction [15,16,17,18].

Figure 1.
Left: ICRC knee joint; Right: All-Terrain knee joint.
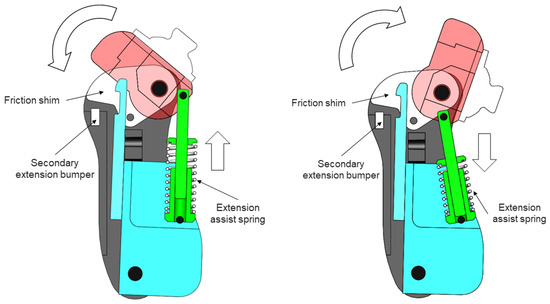
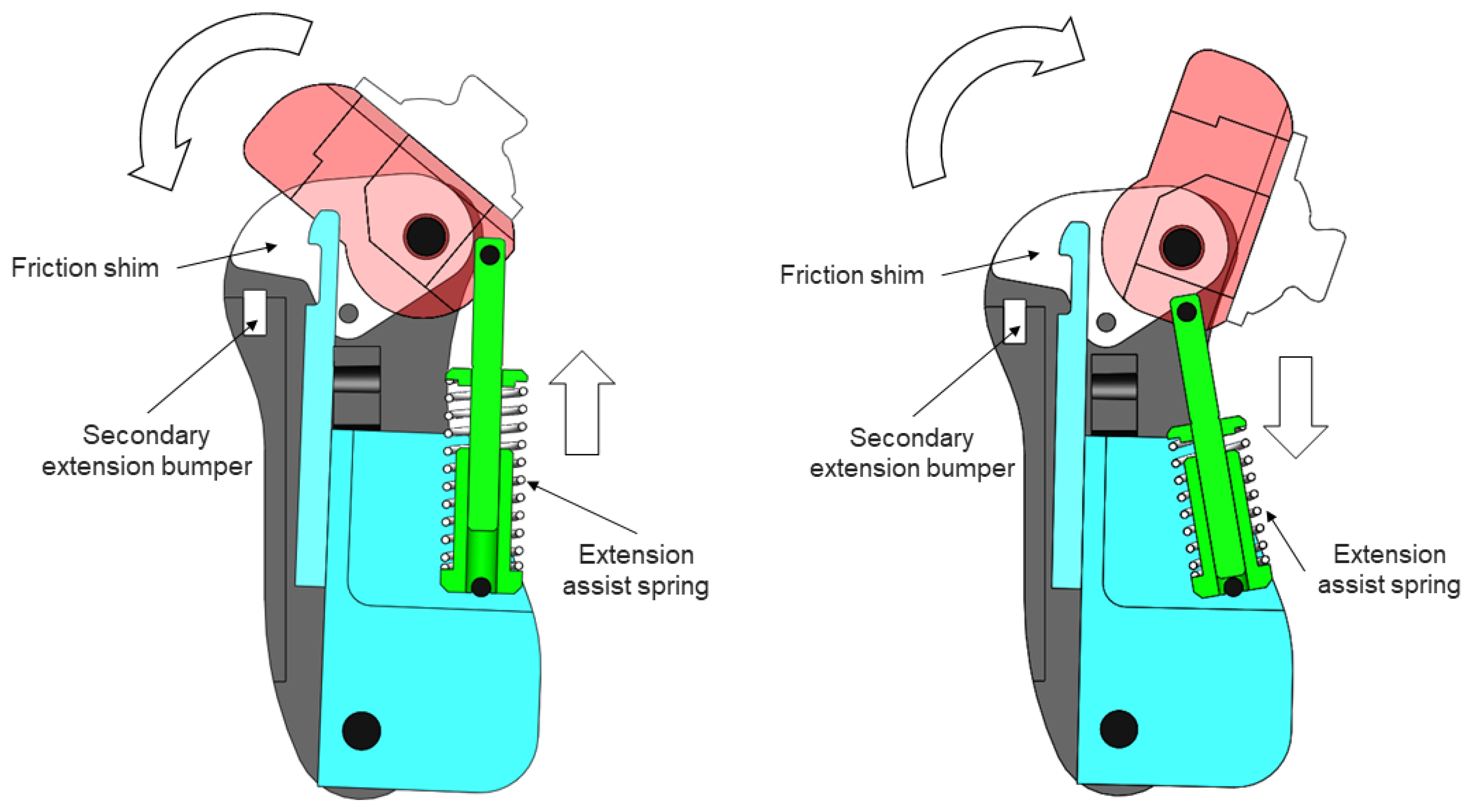
Figure 2.
The main functional components of the variable cadence controller (VCC). Left: Increased friction and low spring force (and secondary extension bumper) decreases terminal impact near full extension; Right: Progressively increased friction (light pink area) and spring force with increase knee flexion helps to limit heel-rise and duration of swing-phase. The technical research details related to the development of the swing-phase controller can be found in [13,19].
The prosthetic facility where the research study was conducted used almost exclusively the International Committee of the Red Cross (ICRC) knee joint for its clientele. The ICRC knee joint (CREquipments, Coppet, Switzerland) is a single-axis manually locking knee joint with an adjustable CF swing-phase mechanism. This robust and affordable knee joint is provided as part of rehabilitation care in dozens of countries, most classified as LMIC [9].
2.2. Experimental Procedures
The study involved three separate sessions. During the first session, demographic data, participant’s height, and weight were acquired. The condition of the participant’s existing ICRC knee and prosthesis was assessed by a certified prosthetist and, if necessary, adjusted to ensure good working condition. One participant had loose swing-phase friction, which was corrected by tightening the designated bolt, and another participant had a loose socket for which a sock was added. Afterwards, the process to fabricate a new prosthesis incorporating the ATK joint was initiated. Both prostheses had a polypropylene socket and Solid Ankle Cushioned Heel (SACH) foot.
Data collection session 1 was held approximately one month after the introductory session to allow time for the fabrication of the ATK prosthesis. Gait data were collected first for the ICRC knee joint. The participant was then given the ATK prosthesis to wear. Instructions and gait training (under one hour) were provided as needed to teach the participant how to operate the ATK joint during walking. Participants took the ATK knee prosthesis to use at home for one month as an acclimation period [20]. Participants returned to the facility one month later for gait data collection with the ATK.
2.3. Recruitment
A total of 17 participants were recruited and completed both sessions of the gait analysis. Eligible study participants comprised of individuals with unilateral TF amputations that were at least 18 years old, >6 months post-amputation, community ambulators, and actively using an existing prosthesis. Participants were excluded in cases of severe concomitant injury (i.e., severe traumatic brain injury, severe spinal cord injury with dysfunction or paralysis, severe burns, etc.) or having residual limb skin complications resulting in walking and balance issues. Participants were recruited from the prosthetic facility at the Department of Prosthetics & Orthotics in Phnom Penh, Cambodia. Ethics approval was obtained from the National Ethics Committee for Health Research, Cambodia (002NECHR) and Bloorview Research Institute Ethics Board (REB16-686). Participants provided written consent prior to data collection.
2.4. Data Collection
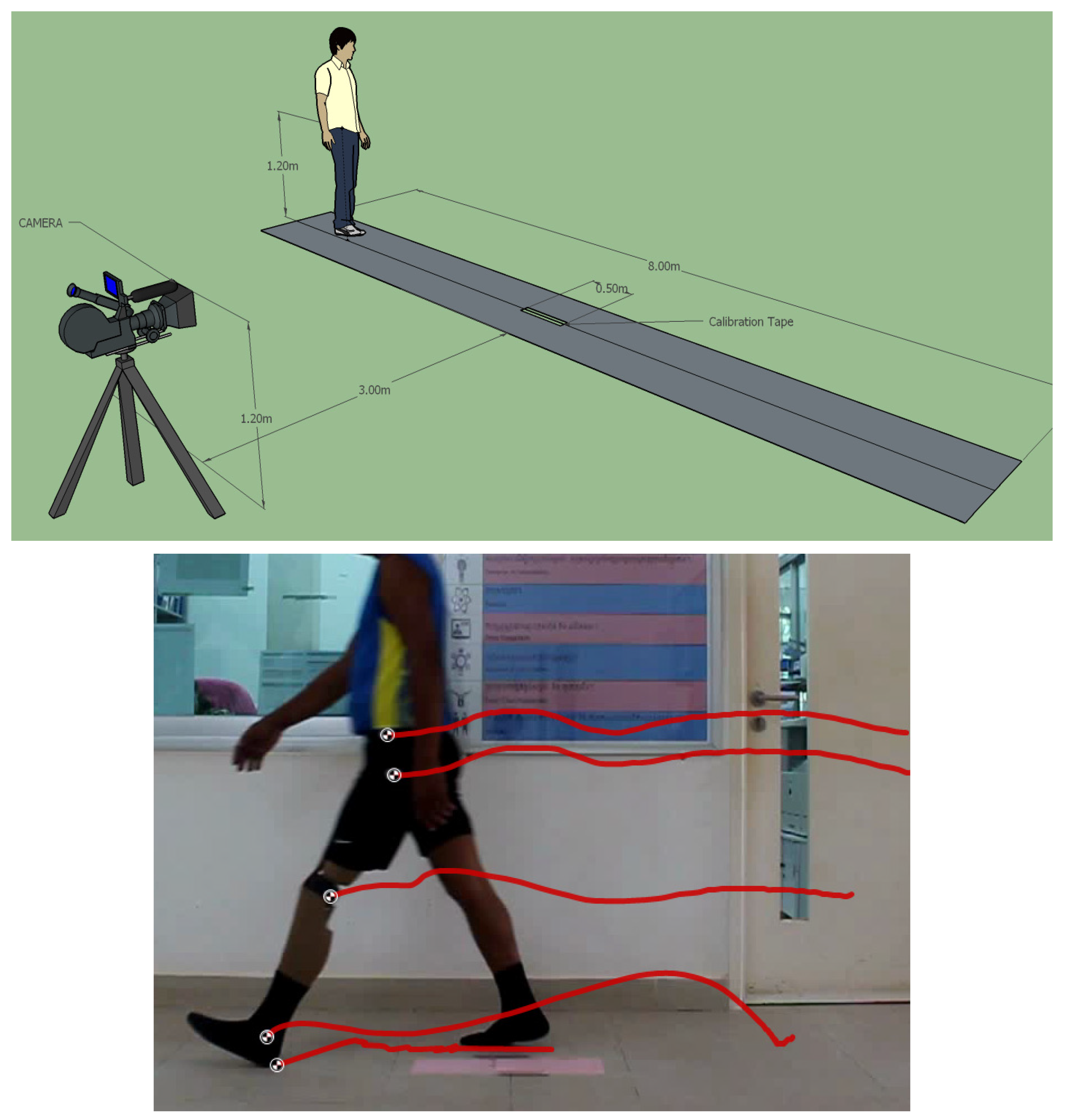
Gait data were collected using a camera-based approach based on established best practices [21,22]. Eight white round stickers with a diameter of 20 mm were adhered on the participants’ right and left lower limbs over the greater trochanter, iliac crest, lateral malleolus (or in line with the intact lateral malleolus), and lateral knee axis (or over the mechanical joint center of the prosthetic knee). Sagittal plane data were collected via a digital camcorder (Canon EOS REBEL T5 W/18-55, Canon Inc., Tokyo, Japan). The camera had a minimum resolution and frame rate of 1280 × 720 and 25 fps, respectively. The camera was placed on a tripod at a height of 1.20 m (approximately hip height) above the ground at a distance of 3 m from the 8-m long walkway [21]. A 50 cm line was marked at the center and parallel to the walkway to allow for calibration of distances during video analysis (Figure 3). The participants were instructed to walk along the walkway at self-selected (normal) and fast-walking speeds. They walked in both directions to collect data bilaterally with two videos in each direction at each speed.
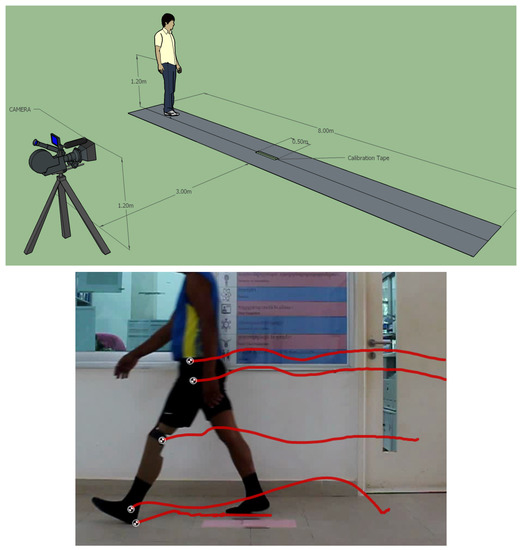
Figure 3.
2D video analysis set up (top) and Kinovea marker tracking (bottom).
2.5. Gait Parameters
An open-source motion analysis software (Kinovea for Windows, Version 0.8.15, www.kinovea.org) and a data processing tool (MATLAB The MathWorks, Inc., Natick, MA, USA) were used to calculate gait parameters from the video data. In Kinovea, the iliac crest marker was used to calculate walking velocity (Figure 3). For the remainder of the spatiotemporal analysis, the heel of each foot was tracked in Kinovea during a gait cycle from that foot’s toe-off to heel strike to calculate cadence, stride length, step length, and swing-time. Prosthetic side knee maximum knee flexion angle was based on the vectors from the knee and greater trochanter, and knee and lateral malleolus markers, respectively.
For the primary characterization of the swing-phase control performance, six parameters were calculated. Swing time indicates the timing of the swinging leg. Step length is the distance that the limb advances with each step. Maximum knee flexion quantifies the amount of heel rise. These gait parameters capture common gait deviations associated with the swing-phase of gait and prosthetic swing-phase control [12,13]. To compare differences between the prosthetic and intact limbs, the symmetry index (SI) [23] was calculated for swing time, step length and knee maximum flexion, as follows:
where V is the parameter measured on the prosthetic and intact limbs. Gait is regarded as symmetrical when SI ≈ 0.
Secondary measures providing a gross characterization of gait included velocity, cadence, stride length and double support time. The additional analyzed gait parameters were chosen as they are most commonly reported in the literature and could be reliably obtained using the available gait analysis protocols [24].
Data were determined to be normally distributed using the Shapiro–Wilk test. A two-tailed paired t-test was applied. Data were categorized by the walking speed (NORMAL and FAST). A Bonferroni adjusted value of p < 0.01 was based on an initial p < 0.05 and primary gait parameters. Statistical analysis was performed in JMP Pro 14 (SAS Institute, Cary, NC, USA).
3. Results
Data were analyzed from the 17 participants that completed both data collection sessions. The sample comprised entirely of males, and except for one participant who lost his limb due to disease, limb loss was due to trauma (Table 1). The participants’ experience in using a prosthesis ranged considerably, from very recent amputations to over 3 decades of prosthetic use. All participants were using the ICRC knee joint prior to this study.

Table 1.
Participant characteristics.
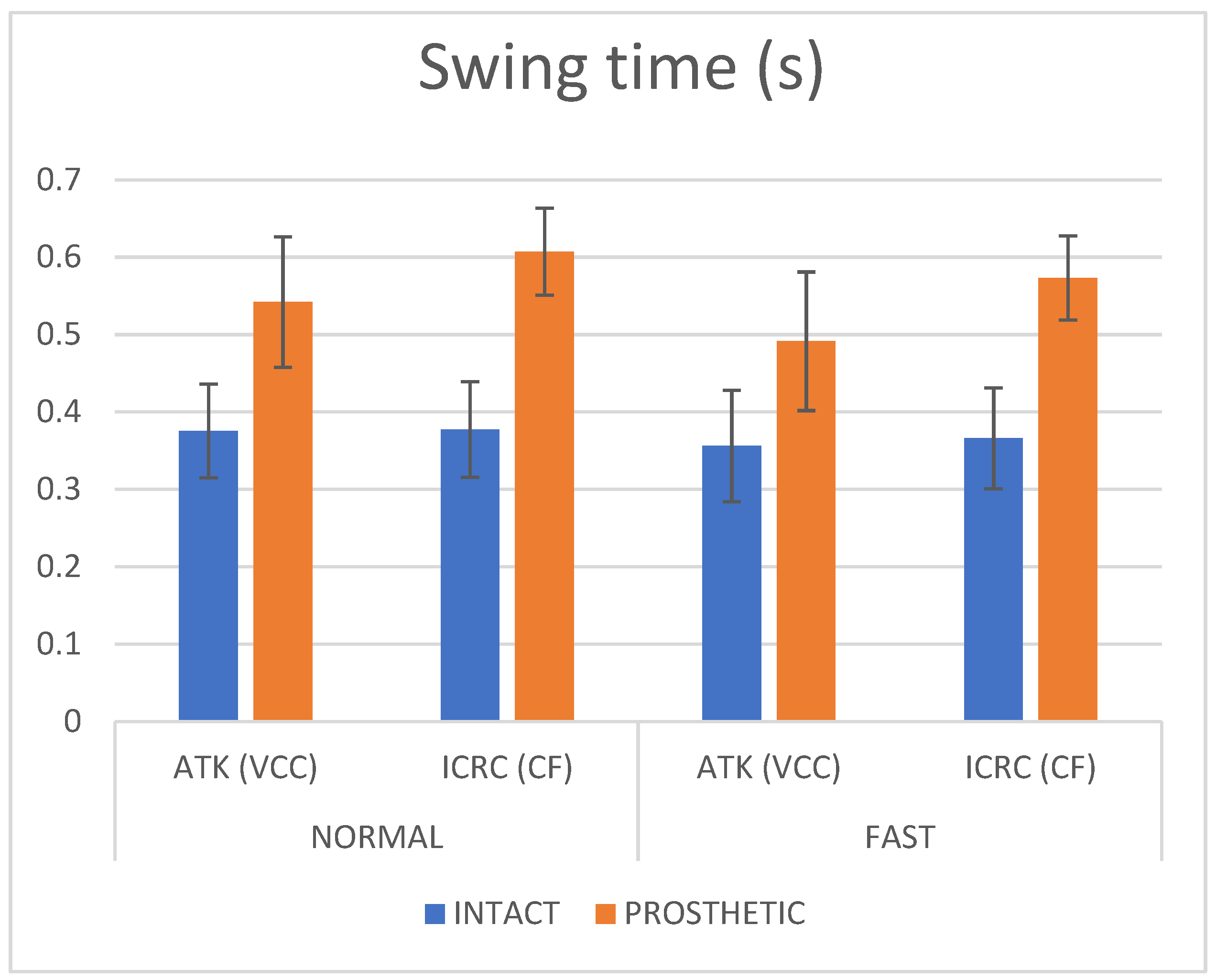
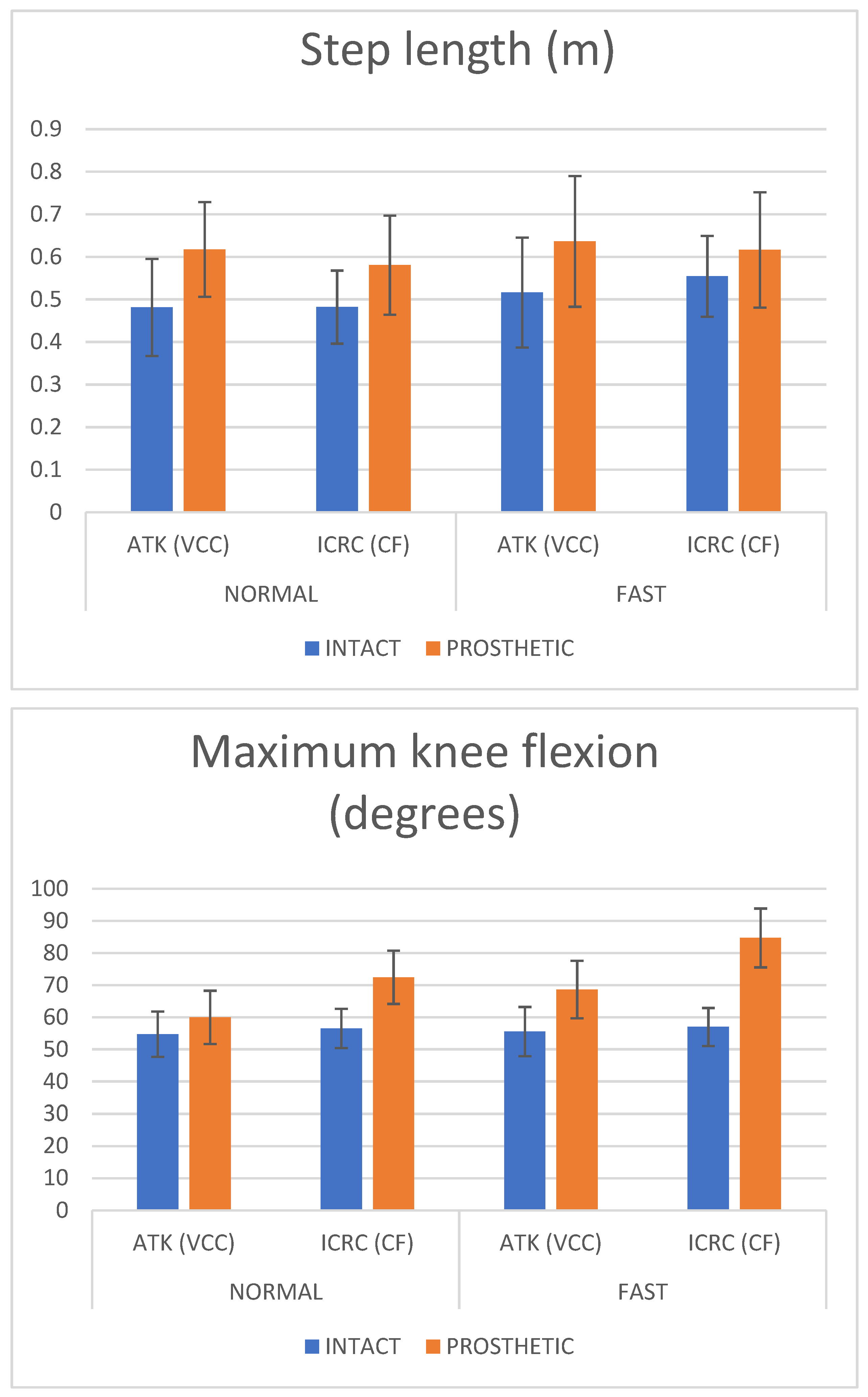
Analysis of the primary parameters revealed significantly higher swing times for the prosthetic limb of the CF compared to the VCC. Swing times for the CF were also significantly more asymmetrical. Significant differences were also found for the prosthetic-side maximum knee flexion during the swing-phase, with the CF exhibiting greater flexion angles and asymmetry between the prosthetic and intact limbs. Step length and step length symmetry were not significantly different between the CF and VCC. These findings held across both walking speeds (Table 2 and Table 3). Data for the prosthetic and intact limbs plotted in Figure 4 show the actual differences for the 3 parameters.
Table 2.
Gait parameters for ICRC CF and ATK VCC for normal walking speeds.
Table 3.
Gait parameters for ICRC and ATK for fast walking speeds.
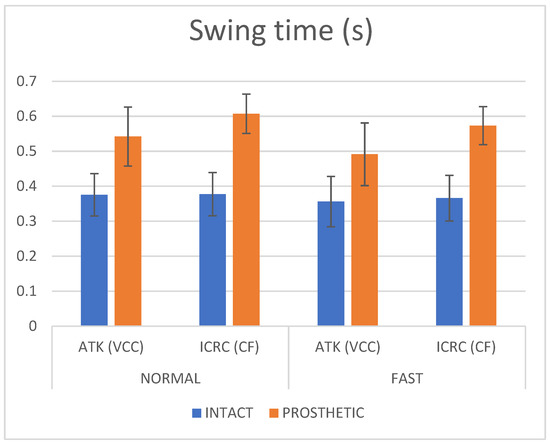
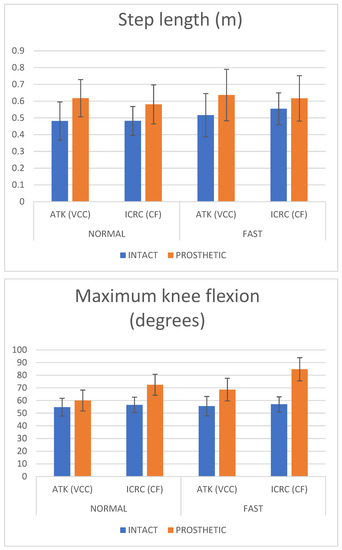
Figure 4.
Swing time, step length and knee flexion maximums for the prosthetic and intact sides for the normal and fast walking speeds. Mean values and one standard deviation shown.
4. Discussion
The goal of this work was to evaluate the gait performance associated with the VCC compared to more traditional constant friction swing-phase control knees. Both designs are based on simple and cost-effective friction braking mechanisms and, thus, generally appropriate for deployment and use in LMICs. However, a gait performance analysis of the VCC has previously not been conducted, and particularly in direct comparison with traditional constant friction mechanisms. Such data can inform clinical practices, and the potential selection of prosthetic components targeting improved clinical outcomes of prosthetic users in LMICs.
Based on the findings of this study, the VCC improves several gait patterns associated with prosthetic swing-phase control including swing-phase timing and peak knee flexion angles. Both gait parameters are reduced with the VCC, thus resulting in greater asymmetry when compared to the intact limb. This is achieved since in contrast to constant friction mechanisms, the VCC provides a gradual increase in friction and spring force, to increasingly resist knee flexion and force knee extension to commence sooner. As such, heel rise and swing time are better controlled than with the CF.
These effects are highly consistent across the two (normal and fast) walking speeds. However, compared to the FC, the VCC produced significantly faster walking speeds at both the normal and fast walking conditions. Faster walking speeds were previously reported for the ATK compared to the constant friction knees [15,18]. The faster walking speeds are likely a result of the swing-phase control improvements associated with the VCC. This is supported by the fact that the differences in velocity between the VCC and CF were primarily due to changes in cadence rather than stride length (i.e., taking more steps rather than longer ones). However, some of the spatiotemporal and kinematic differences may also be related to differences in the stance-phase control mechanism [17]. Moreover, constant friction knees resulting in excessively prolonged prosthetic swing times and heel rise, can limit faster walking speeds, since these gait deviations become more pronounced and can disrupt normal gait biomechanics [12]. Despite walking at faster gait speeds with the VCC, the measured gait deviations (prolonged swing time and heel rise) were actually reduced compared to the CF. This supports the notion that achieving more symmetrical gait patterns can be advantageous in facilitating overall improvement in mobility and walking capacity. This is important since most individuals with transfemoral amputations exhibit slower and more fatiguing gait [3,4]. In resource-limited health care systems, which typically serve younger traumatic amputee populations capable of utilizing and benefiting from higher performance componentry, the VCC may be considered a viable option. However, it is important to further study and consider other factors such as technological appropriateness, cost, durability, ease of use, and cultural preferences amongst others.
While the ATK improved several aspects of gait related to swing-phase resulting in more symmetrical gait patterns, substantial differences (asymmetries) between the intact and prosthetic side gait parameters remained, as seen in Figure 3. These differences may in part be due to limitations associated with friction-based systems, in contrast to hydraulic or microprocessor knee joints that provide more precise swing-phase control over a broader range of conditions. Secondly, while instructions were provided for setting up the VCC, it is unknown how well the prosthetists were able to follow these instructions, and therefore whether the optimal setup and adjustments of the VCC were achieved. Nevertheless, this represents the realities associated with the deployment and use of prosthetic technology in LMICs, and therefore the data are more likely to represent the actual performance of both knees in these settings. It further speaks to the importance of technology that is intuitive and simple to use by prosthetists and prosthesis wearers alike.
This study has several limitations. Since it was conducted in an LMIC, the collection was limited by the available gait analysis technology. Video-based gait analysis was performed using standard optical recording equipment. While such systems can provide valid and reliable data [25], they do have limitations in terms of accurate capture of certain parameters [22]. Hence, only sagittal plane gait parameters were acquired. Due to the resolution, lighting, and low frame rates, markers were blurry in some frames, and this limited the accurate extraction of certain gait parameters, such as ankle and hip joint angles, where markers are near each other, and small positional inaccuracies result in large errors in segmental angles. Hence, these parameters were excluded. All participants were long-time users of the ICRC knee, and it is unclear whether the acclimation time was adequate to facilitate motor relearning, and the optimal utilization of the VCC knee joint. Nevertheless, the highly significant gait differences found between the knee joints suggest that acclimation was likely achieved.
5. Conclusions
This study provides new evidence about the differences in walking patterns related to knee joints used in LMICs. The ATK VCC swing-phase mechanism resulted in gait improvements compared to the ICRC constant friction knee joint. In particular, the variable resistance during swing-phase provided by the VCC resulted in reduced and more symmetrical swing-phase timing and knee flexion angles. Faster walking speeds were also measured for the VCC, which may be associated with the VCC’s improved swing-phase control performance. The findings should be considered in the development and provision of prosthetic knee joint components in LMICs where the need for technology that is affordable, durable, and functional persists.
Author Contributions
Conceptualization, J.A., A.E., S.K., T.H. and P.T.; methodology, J.A., A.E. and A.M.; formal analysis, J.A. and A.M.; writing—original draft preparation, J.A. and A.M.; writing—review and editing, J.A., A.E., S.K., T.H. and P.T.; visualization, J.A., A.M. and A.E.; supervision, J.A.; project administration, J.A.; funding acquisition, J.A. All authors have read and agreed to the published version of the manuscript.
Funding
The work was funded by Grand Challenges Canada.
Institutional Review Board Statement
The study was conducted in accordance with the Declaration of Helsinki and ethics approval was obtained from the National Ethics Committee for Health Research, Cambodia (002NECHR) and Bloorview Research Institute Ethics Board (REB16-686).
Informed Consent Statement
Informed consent was obtained from all subjects involved in the study.
Data Availability Statement
Not applicable.
Conflicts of Interest
Jan Andrysek is the co-founder and Chief Technical Officer at LegWorks. None of the other co-authors have conflicts of interest related to this work.
References
- Eberly, V.J.; Mulroy, S.J.; Gronley, J.K.; Perry, J.; Yule, W.J.; Burnfield, J.M. Impact of a stance phase microprocessorcontrolled knee prosthesis on level walking in lower functioning individuals with a transfemoral amputation. Prosthet. Orthot. Int. 2014, 38, 447–455. [Google Scholar] [CrossRef] [PubMed]
- Uchytil, J.; Jandacka, D.; Zahradnik, D.; Farana, R.; Janura, M. Temporal-spatial parameters of gait in transfemoral amputees: Comparison of bionic and mechanically passive knee joints. Prosthet. Orthot. Int. 2014, 38, 199–203. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Genin, J.J.; Bastien, G.J.; Franck, B.; Detrembleur, C.; Willems, P.A. Effect of speed on the energy cost of walking in unilateral traumatic lower limb amputees. Eur. J. Appl. Physiol. 2008, 103, 655–663. [Google Scholar] [CrossRef] [PubMed]
- Jarvis, H.L.; Bennett, A.N.; Twiste, M.; Phillip, R.D.; Etherington, J.; Baker, R. Temporal spatial and metabolic measures of walking in highly functional individuals with lower limb amputations. Arch. Phys. Med. Rehabil. 2017, 98, 1389–1399. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gailey, R. Review of secondary physical conditions associated with lower-limb amputation and long-term prosthesis use. J. Rehabil. Res. Dev. 2008, 45, 15–30. [Google Scholar] [CrossRef] [PubMed]
- Ephraim, P.L.; Wegener, S.T.; MacKenzie, E.J.; Dillingham, T.R.; Pezzin, L.E. Phantom pain, residual limb pain, and back pain in amputees: Results of a national survey. Arch. Phys. Med. Rehabil. 2005, 86, 1910–1919. [Google Scholar] [CrossRef] [PubMed]
- Van Velzen, J.M.; Van Bennekom, C.A.M.M.; Polomski, W.; Slootman, J.R.; Van Der Woude, L.H.V.V.; Houdijk, H. Physical capacity and walking ability after lower limb amputation: A systematic review. Clin. Rehabil. 2006, 20, 999–1016. [Google Scholar] [CrossRef] [Green Version]
- Amtmann, D.; Morgan, S.J.; Kim, J.; Hafner, B.J. Health-Related Profiles of People with Lower Limb Loss. Arch. Phys. Med. Rehabil. 2015, 96, 1474–1483. [Google Scholar] [CrossRef] [Green Version]
- Jensen, J.S.; Raab, W. Clinical field testing of trans-femoral prosthetic technologies: Resin-wood and ICRC-polypropylene. Prosthet. Orthot. Int. 2004, 28, 141–151. [Google Scholar] [CrossRef] [Green Version]
- Furse, A.; Cleghorn, W.; Andrysek, J. Development of a low-technology prosthetic swing-phase mechanism. J. Med. Biol. Eng. 2011, 31, 145–150. [Google Scholar] [CrossRef]
- Andrysek, J. Lower-limb prosthetic technologies in the developing world: A review of literature from 1994–2010. Prosthet. Orthot. Int. 2010, 34, 378–398. [Google Scholar] [CrossRef] [PubMed]
- Tsai, C.S.; Mansour, J.M. Swing phase simulation and design of above knee prostheses. J. Biomech. Eng. 1986, 108, 65–72. [Google Scholar] [CrossRef] [PubMed]
- Furse, A.; Cleghorn, W.; Andrysek, J. Improving the gait performance of nonfluid-based swing-phase control mechanisms in transfemoral prostheses. IEEE Trans. Biomed. Eng. 2011, 58, 2352–2359. [Google Scholar] [CrossRef] [PubMed]
- Variable Cadence Controller Demo. Available online: https://www.youtube.com/watch?v=bgGCPs5Trj8 (accessed on 10 August 2021).
- Andrysek, J.; Klejman, S.; Torres-Moreno, R.; Heim, W.; Steinnagel, B.; Glasford, S. Mobility function of a prosthetic knee joint with an automatic stance phase lock. Prosthet. Orthot. Int. 2011, 35, 163–170. [Google Scholar] [CrossRef] [PubMed]
- Andrysek, J.; Wright, F.V.; Rotter, K.; Garcia, D.; Valdebenito, R.; Mitchell, C.A.; Rozbaczylo, C.; Cubillos, R. Long-term clinical evaluation of the automatic stance-phase lock-controlled prosthetic knee joint in young adults with unilateral above-knee amputation. Disabil. Rehabil. Assist. Technol. 2017, 12, 378–384. [Google Scholar] [CrossRef] [PubMed]
- Andrysek, J.; García, D.; Rozbaczylo, C.; Alvarez-Mitchell, C.; Valdebenito, R.; Rotter, K.; Wright, F.V. Biomechanical responses of young adults with unilateral transfemoral amputation using two types of mechanical stance control prosthetic knee joints. Prosthet. Orthot. Int. 2020, 44, 314–322. [Google Scholar] [CrossRef] [PubMed]
- Andrysek, J.; Michelini, A.; Eshraghi, A.; Kheng, S.; Heang, T.; Thor, P. Functional outcomes and user preferences of individuals with transfemoral amputations using two types of knee joints in under-resourced settings. Prosthet. Orthot. Int. 2021, 45, 463–469. [Google Scholar] [CrossRef] [PubMed]
- Burke, B.; Andrysek, J. Variable Friction-Based Swing-Phase Controller with Artificial Joint. U.S. Patent No. 10,702,401, 8 April 2020. [Google Scholar]
- Fiedler, G.; Zhang, X. Quantifying accommodation to prosthesis interventions in persons with lower limb loss. Gait Posture 2016, 50, 14–16. [Google Scholar] [CrossRef]
- Fatone, S.; Stine, R. Capturing quality clinical videos for two-dimensional motion analysis. J. Prosthet. Orthot. 2015, 27, 27–32. [Google Scholar] [CrossRef]
- Michelini, A.; Eshraghi, A.; Andrysek, J. Two-dimensional video gait analysis: A systematic review of reliability, validity, and best practice considerations. Prosthet. Orthot. Int. 2020, 44, 245–262. [Google Scholar] [CrossRef] [PubMed]
- Robinson, R.O.; Herzog, W.; Nigg, B.M. Use of force platform variables to quantify the effects of chiropractic manipulation on gait symmetry. J. Manip. Physiol. Ther. 1987, 10, 172–176. [Google Scholar]
- Sagawa, Y.; Turcot, K.; Armand, S.; Thevenon, A.; Vuillerme, N.; Watelain, E. Biomechanics and physiological parameters during gait in lower-limb amputees: A systematic review. Gait Posture 2011, 33, 511–526. [Google Scholar] [CrossRef] [PubMed]
- Ugbolue, U.C.; Papi, E.; Kaliarntas, K.T.; Kerr, A.; Earl, L.; Pomeroy, V.M.; Rowe, P.J. The evaluation of an inexpensive, 2D, video based gait assessment system for clinical use. Gait Posture 2013, 38, 483–489. [Google Scholar] [CrossRef] [PubMed]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).