1. Introduction
Depth sensing indentation is commonly adopted for the determination of local elastic and plastic properties of small size samples. In the case of homogeneous and isotropic classical elastic materials deformed at small strain, the determination of the resolved elastic modulus follows a well established analytical solution of the normal compression of two smooth solids (see, e.g., Sneddon [
1], K.L Johnson [
2], for example). One of the useful results relates the applied load to the relative approach of the two solids or the material depression (if one of the solids is rigid). The load and the penetration are the only quantities recorded during the test. In the classical theory, the depression is also related to the radius of the projected contact area and the radius of the spherical punch. It has been shown that, in the small strain deformation regime, the useful relation between the material depression and the radius of the contact area remains valid in the plastic regime [
3].
It is more and more evident that a finer description of the mechanical behavior of some material should take into account their microstructure. This can be done in the framework of generalized continuum theories which extend the conventional continuum mechanics for incorporating intrinsic microstructural effects in the mechanical behavior of materials. Amongst the various approaches, there is the so-called micromorphic medium of Eringen [
4] which is widely accepted as the most successful phenomenological top-down approach. In this theory, the impact of the microstructure of the medium is expressed at the macroscopic scale through an incompatible microdeformation tensor. The latter can be specialized depending on the prominent microscopic effect at the macro scale. Accordingly, if the prominent microscopic effect is the individual rigid rotation of the material points, the microdeformation tensor is specialized to represent this micro-rotation. The corresponding theory is that of micropolar materials also known as Cosserat materials [
5]. The model was applied to porous and granular media (e.g., [
6] (Ehlers, 1997) [
7,
8]) and even to living tissues such as bones (e.g., [
9,
10,
11,
12,
13]). The identification of the material parameters of the micropolar elastic model has also been the subject of a number of works (see e.g., [
14,
15]. Depth sensing indentation is, among others, a valuable experimental tool for the mechanical characterization of some of this materials. The question arises as to whether the well-known relationships for homogeneous and isotropic materials remain valid in the case of elastic isotropic Cosserat materials.
The present numerical study intends to shed some light on this point. The numerical studies consider a diamond punch indenting a micropolar medium. The analysis uses the identified engineering parameters for micropolar elasticity, namely: (the Young modulus), (the shear modulus), (the Poisson ratio), (the characteristic length in torsion), (the characteristic length in bending), (the polar ratio), and (the coupling number).
The specifically developed numerical tool combines the advantages of the boundary elements method and a strong form point collocation method. The method called Local point interpolation-boundary element method has been initiated by Kouitat [
16] in the context of anisotropic materials. It has since proved efficient for various fields including micropolar materials (see [
17,
18,
19]).
The governing equations of micropolar media are recalled in
Section 2 below. The main steps of the LPI-BEM and the global flowchart of the numerical tool are presented in
Section 3. The numerical results are shown and discussed in
Section 4.
3. Solution Method
The boundary element method has already proven highly efficient for the solution of linear problems with well-established analytical fundamental solution. The boundary integral equation method in micropolar elasticity has been proposed by Sladek and Sladek [
22]. An extension of the study to microstretch media is intended, thus this formulation will not be adopted. On application of the conventional BEM in this study, with Somigliana fundamental solution, the boundary element method (BEM) loses its principal appeal, namely the reduction of the problem dimension by one, due to traditional volume cells being needed in the so-called “field boundary element method” or “domain boundary element method”. This obstacle can be overcome by a number of strategies such as the dual reciprocity method [
23] or radial integration method [
24], which enable the conversion of volume integrals into surface ones.
In recent years, a large number of researchers have invested in the development of so-called meshless or meshfree methods. Among the various meshless approaches, the local point interpolation method is highly appealing because it is simple to implement. This approach falls in accuracy in the presence of Neumann boundary conditions, which are almost an inevitability when solving solid mechanic problems. Liu et al. have suggested a way to circumvent this difficulty by adopting the “weak-strong-form local point interpolation” method [
25]. Recently, Kouitat [
16] proposed a novel strategy that combines the best elements of both the conventional BEM and local point interpolation methods. This LPI-BEM approach has proved efficient in a number of contexts including micropolar elasticity [
17,
19]. This method is adopted in the present study and the main steps of the approach in the context of a micropolar elasticity are recalled below.
Let
,
, then one could write the force stress tensor in the form:
Similarly, set
and
; then, the couple stress tensor reads:
The calculations were based on the assumption that the kinematical primary variables are the sum of a complementary part and a particular term, namely: and .
The complementary fields satisfied the following homogeneous equations:
These equations which are of the Navier type were solved by the conventional boundary element method, thus producing the following systems of equations:
where
,
are vectors of nodal kinematical fields and
,
are the vectors of nodal traction.
The particular fields solve:
The tractions at a regular point on the boundary are written as:
Following this, the solution of Equations (7) and (8) were considered, using a local radial point collocation method. In this method [
5], a field
is approximated as:
with the following constraints:
,
and
.
Here, is the selected radial basis functions, the number of nodes in the neighborhood (support domain) of point , and the number of monomial terms in the selected polynomial basis .
Coefficients
and
can be determined by enforcing the approximation to be satisfied at the
centers. Following some algebraic manipulations, coefficients
and
are expressed in terms of the field nodal values, and the interpolation is written in the following compact form:
When adopting interpolation (12) for all kinematical fields, at a given collocation center, the following were obtained:
Matrix was given in terms of vector and matrix C was the Voigt representation of the elasticity tensor.
On collection of the above equations for all the internal collocation centers, taking the assumption that the particular integrals are identically zero at all boundary points, the following forms of systems of equations were obtained:
Following a similar strategy, the tractions at the boundary points could be written in the following forms:
After conducting some algebraic manipulations, the final coupled systems of equations were of the following forms:
It is particularly worthy of mention that the final equations contained similar boundary primary variables and internal kinematic unknowns to those of a traditional BEM. Boundary conditions can be taken into account as in standard practice.
When the problem at hand is concerned with more than one medium, then the above equations are valid for each sub-domain. Let
denote a perfectly bonded interface between body
and body
. Then, for point
of body
and point
of body
sharing the same geometrical location in
, the following conditions must be fulfilled:
In the case of a non-conforming contact problem, the equations must be supplemented by the unilateral contact conditions between the contacting bodies. Focusing on the case of an elastic punch, these conditions are written only for the macro displacement and macro traction. Indeed, it is believed that it is not possible to apply micro torque at the specimen boundary. The micro torque is assumed to take zero value on all boundaries. On the boundary of the contacting body A (resp. B), a potential contact area
(resp.
) is defined a priori. For a node
of
and a target node
on
, the following relations apply:
In the above relations, denotes the initial normal gap between of and on . and stand for the normal displacements of points and in the direction of the common normal, which is usually taken as that of the flat specimen. is the normal traction at point and is the tangential traction. It assumed here that the contact is frictionless.
Indentation by a spherical punch is a non-conforming contact problem in the sense that, for a given load, the contact surface is not known in advance. It is then advised to solve the above coupled systems of equations incrementally. Let
be the increment of the field
from the previously converged solution to the actually sought solution. Then, the incremental forms of systems (15) and (16) are:
Applying the boundary conditions as usual, accounting eventually for Equation 16, global systems of the following forms are obtained:
In the case of a non-conforming contact problem, Equation (23) must be supplemented with relations (19) and (20). The resulting system of equations is nonlinear and non-differentiable. The algorithm introduced par Christensen [
26] has been adopted. The pseudo code implemented for the solution of the problem is as follows:
For the actual load increment:
- 1.
Set k = 0,, ;
- 2.
Solve ;
- 3.
Solve ;
- 4.
If the > (a given tolerance) go to 2.
4. Numerical Results
In this work, the multi-quadrics radial basis functions are applied as follows: , where and and were known as shape parameters. Shape parameter was taken proportionally to minimum distance , defined as the maximum value among the minimum distances in the , , and directions between collocation points.
Let us focus on the elastic indentation problem. For conventional materials, a famous relation of the Hertzian theory of contact states that: , with () the indenter depression, () the radius of the projected contact disc, and () the radius of the spherical punch. Another famous relationship of the Hertzian theory of contact is the relation between the applied load (), the punch radius, and the contact radius, with . Knowing the value of and postulating the value of the Poisson ratio, the Young modulus can be calculated.
A part of a diamond ball with radius 100 µm is considered. The boundary of the ball piece was subdivided into 100 elements with 402 boundary nodes including 153 nodes of the potential contact area. The considered micropolar solid is a cuboid with depth 5 mm and squared cross section with size 600 µm. Its boundary was subdivided into 236 elements with 1022 boundary nodes. These latter were supplemented with 1069 internal collocation centers.
The material constants of micropolar elasticity (see Equations (3) and (4)) are related to technical material parameters that have been identified individually via experiments [
6]. These material parameters are:
The Young modulus ;
The shear modulus ;
The Poisson ratio ;
The characteristic length in torsion ;
The characteristic length in bending ;
The polar ratio ;
The coupling number .
Let us remind the reader that the values of, and are those that can be assessed by a simple tension test.
4.1. Influence of the Coupling Number
In a first set of simulation, five set of material constants were selected (see
Table 1 below) leading to the following values of material parameters:
,
,
,
,
and
= 1. It should be noted that,
,
and
ν have the same values for all considered cases.
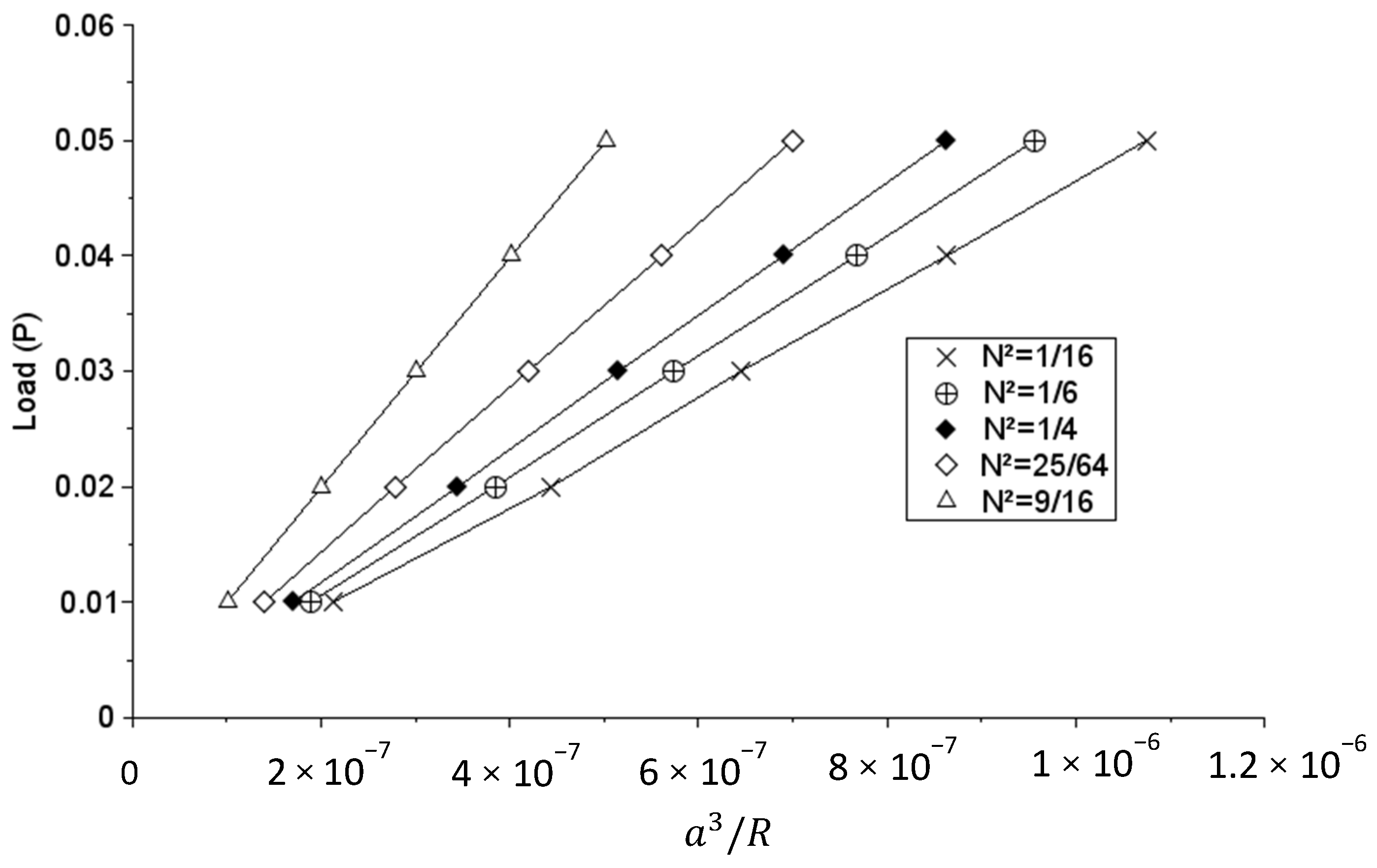
As can be observed, the square of the coupling number varies from 1/16 to 9/16.
A load of 50 mN was applied on the punch in five load steps. The indenter depression (), the contact pressure distribution (), and the interval containing the contact radius () were calculated. Let denote the radius of the spherical punch. It is found that the famous Hertzian relation is still valid for the tested cases of micropolar solids. It is then possible to say that, having measured the punch depression and knowing its radius of curvature, the contact radius can be reached.
In
Figure 1 below, the plots of
versus
are shown for the considered material parameters. It can be observed that all the curves are linear. A simple linear fit then allowed to determine the parameters of the fitting lines. The results are collected in
Table 2 below.
It should be noted that, according to Hertzian theory of contact, for the given values of Young modulus and Poisson ratio, the slope of the fitting line should be
. It is clear from data in
Table 2 that a relation of the form
is still valid (index
is introduced to represent the coupling number). However, the value of the parameter
varies with the coupling number.
The ratios of the calculated
over
are collected in
Table 3 below.
4.2. Influence of the Characteristic Length in Torsion and the Polar Ratio
Other sets of material constants were adopted (see
Table 4). They led to the same coupling numbers as in the former case. Now,
and
= 1.5.
The values obtained for
were those of
Table 2. This means that the results are not disturbed by parameters
and
.
4.3. Influence of the Characteristic Length in Bending
Let us now consider the potential effect of the characteristic length in bending. For this purpose, the material parameters in
Table 5 are adopted.
The characteristic length in torsion is that of the preceding case. Now, and = 0.75.
Once more, the results of the calculation show that values of are still those in the table.



{kind=link}