1. Introduction
Massive Multiple-Input–Multiple-Output (MIMO), alongside with millimeter-wave communications (mm-Wave), are two key techniques that will support the improvements of 5G (Fifth Generation) communications, such as improved spectral efficiency and network capacity [
1,
2]. Such a combination of massive MIMO (m-MIMO) with mm-Wave [
3] is being utilized by other systems, such as IEEE 802.11ad [
4], using bands around 60 GHz [
5].
For small cells, dedicated to increasing the capacity in a small geographic area of 5G communications, mm-Wave communications will be used [
6]. Under these conditions, the area throughput will be augmented by increasing the bandwidth of the communication channels. However, it is well known that there is a very large path loss in the mm-Wave spectrum. Therefore, in order to mitigate such path loss, MIMO techniques such as beamforming will be implemented to guarantee a large array gain at the reception, so that the signal-to-noise ratio (SNR) of the received signal is acceptable. It should also be noted that due to the large path-loss in mm-Wave, the interference is lower, and the cell density can be increased by reducing the inter-base station distance, which leads to capacity gains.
Regarding large-cells, commonly responsible for the coverage and mobility tiers, there is no available bandwidth to increase the capacity. Therefore, massive MIMO techniques will be employed since they allow for huge gains in spectral efficiency [
7,
8,
9]. These gains come from the use of appropriate precoding/decoding schemes that can take advantage of the tens or even hundreds of antennas and yield very large array and multiplexing gains. This technique is also known as multi-user MIMO and it enables more users to be multiplexed in a given time-frequency resource, which leads to higher area throughputs.
One difference of 5G communications relating to all previous generations is the possibility of allowing direct mobile-to-mobile communications, based on the IP protocol (Internet of Things), in addition to the traditional communication through base stations. This direct mode of operation uses frequencies of the order of 60 GHz, to the detriment of the traditional carriers between 2 and 3 GHz (centimeter waves), presenting a much higher channel coherence bandwidth. Moreover, the implementation of m-MIMO is facilitated with mm-Wave due to the very low wavelength and small antenna size. It is worth noting that the distance between antenna elements is such that the signals in adjacent elements are uncorrelated, which requires a minimum distance of 3 to 5 wavelengths (depending on the propagation scenario).
Intersymbol Interference is the most severe problem of wireless communications [
10]. One technique that can be employed to mitigate this limitation is using a block transmission technique, such as Orthogonal Frequency Division Multiplexing (OFDM) or Single-Carrier with Frequency-Domain Equalization (SC-FDE) [
11]. By combining a block transmission technique with m-MIMO, results in a system that tends to be very agile, resistant to intersymbol interference and able to face the requirements of future wireless systems.
OFDM signals comprise the transmission of a sum of many independent and parallel sub-carriers, which leads to signals with a high peak-to-average power ratio (PAPR), translated in a reduced amplification efficiency [
12] (a similar effect occurs with the transmission of high order modulations in single-carrier systems). An alternative block transmission technique that mitigates this limitation is the SC-FDE scheme. This presents lower envelope fluctuations of signals, translating in lower-complexity and more efficient power amplification [
13], being well suited for the uplink of a cellular system, where the mobile terminal has limitations in terms of dynamic range.
The post-processing of block transmission techniques and m-MIMO comprises, among other specificities, the equalization process. This requires an accurate channel estimate by the receiver. Channel estimation can be performed making use of pilots multiplexed with data [
14]. Nevertheless, this means that a part of the spectrum is dedicated to such estimate, which degrades the efficiency. An alternative channel estimate technique makes use of superimposed pilots (also referred to as implicit pilots) [
15]. In this case, pilots are added to the data [
16], but a problem of interference between pilots and data exists: the detection of data is degraded due to the existence of overlapping pilots, and the channel estimate obtained with the pilots is degraded due to the existence of the overlapping data. This can be overcome through the implementation of an iterative receiver, where the channel estimate and data detection take place in different iterations of the receiver, while subtracting the non-desired signal of such iteration (i.e., subtracting the data from the pilots or the pilots from the data).
Most of the work that has been done in the area of iterative receivers performing joint detection and channel estimation for massive MIMO is based on OFDM [
17,
18]. This article focusses on SC-FDE, using an iterative receiver specific of this transmission technique.
The receiver of a communication system employing MIMO should be able to separate different data streams, translating in an increase of complexity. Knowing that the computation requirements tends to increase with the number of antennas, such computation tends to be extremely high in the case of m-MIMO. Therefore, using a low complexity receiver, one can decrease such complexity. The Zero Forcing (ZF) algorithm corresponds to a certain complexity [
19], as it requires the computation of the pseudo-inverse of the channel matrix, for each frequency component of the channel. In that context, we propose a simplified receiver for m-MIMO, based on either the Maximum Ratio Combiner (MRC) [
15] or on the Equal Gain Combiner (EGC) [
10], and therefore, the computation requirements are kept at a lower level. The advantage of these algorithms relies on the fact that the computation of the pseudo-inverse of the channel is overcome, reducing the complexity. Nevertheless, since such algorithms are non-optimum, a certain interference is generated in the detection process. This is mitigated by incorporating an iterative receiver that performs the following functions:
This article presents and studies an iterative receiver based on MRC/EGC algorithms, that jointly perform channel estimation and data detection (including interference mitigation), optimized for m-MIMO and using SC-FDE signals.
This article is organized as follows:
Section 2 describes the system and signal characterization for m-MIMO using SC-FDE transmissions;
Section 3 describes the channel estimation using multiplexed or superimposed pilots;
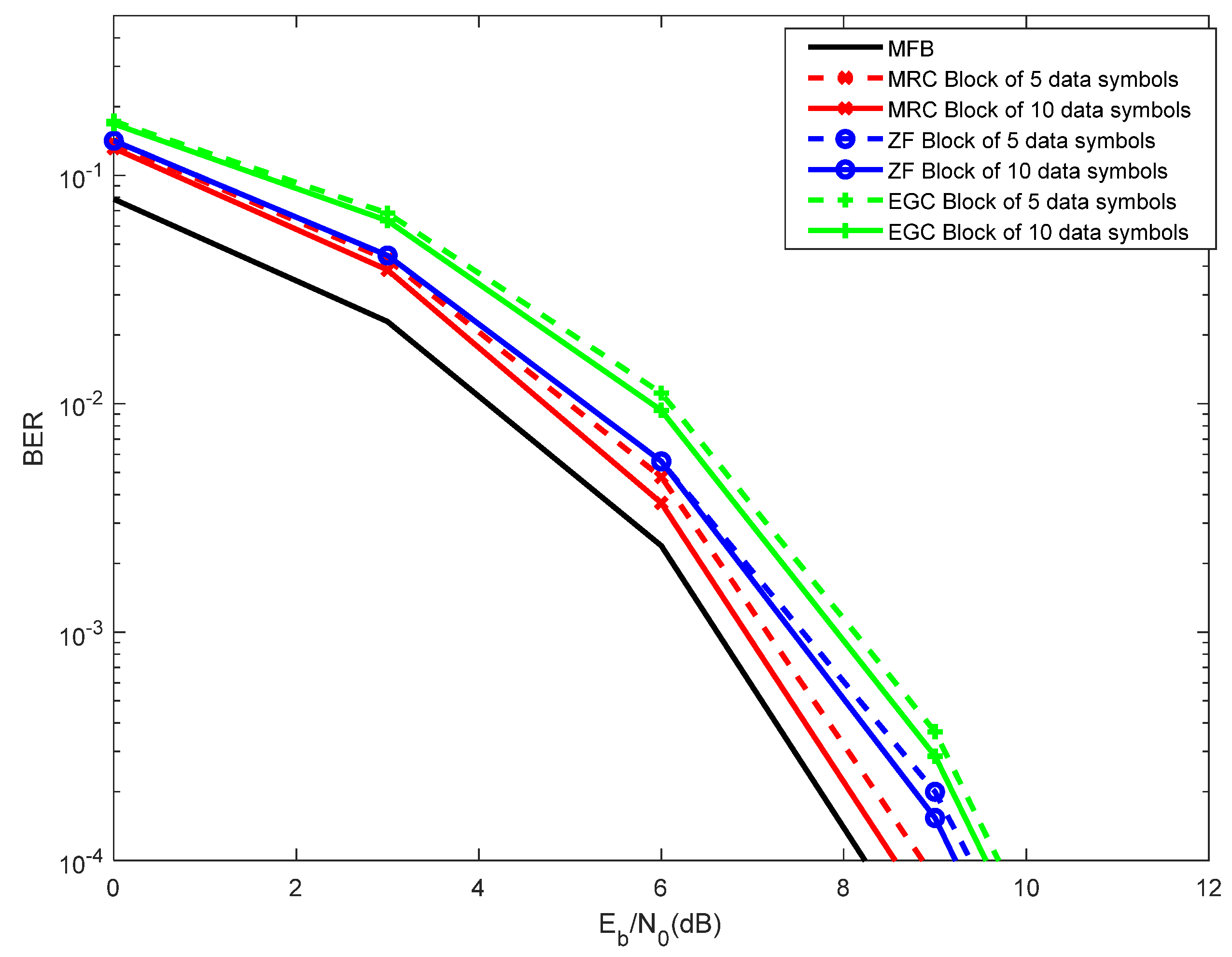
Section 4 analyzes the performance results and
Section 5 concludes the article.
2. System and Signal Characterization
It is assumed a MIMO scenario (
Figure 1), with
T transmit antennas and
R receive antennas, using SC-FDE signals with the Quadrature Phase Shift Keying (QPSK) modulation.
We consider an N-length time-domain block signal to be transmitted of the form . The corresponding frequency-domain block is obtained as , i.e., by performing the Discrete Fourier Transform (DFT) of the time-domain block.
After removing the cyclic prefix, and assuming a cyclic prefix longer than the overall channel impulse response of each channel, the received frequency-domain signal comes,
where
denotes the channel frequency response for the
k-th subcarrier (which is assumed invariant during the transmission of a given block), i.e.,
. Moreover,
is the frequency-domain block channel noise for that subcarrier. The received time-domain signal can be obtained from (1) as
[
15].
Assuming the conventional linear FDE for SC schemes, the post-processing comes,
where
. As expected,
This means that the received symbol corresponds to the transmitted one, multiplied by that can be viewed as a gradient, with a noise factor , and added by the noise .
In addition, we define
as
denotes the equivalent noise for detection purposes, with
, and with
.
This article focus on the scenario with
T data streams, where
R≫
T. The
tth antenna has a block of
N data symbols
to send. At the BS, the received block associated to the
rth user is represented by
. As with other SC-FDE schemes, a cyclic prefix longer than the maximum overall channel impulse response is appended to each transmitted block and removed at the receiver. In this case, the corresponding frequency-domain block
satisfies
where
denotes the
channel matrix for the
kth frequency, with
element
. The transmitted symbols comes
.
Let us consider the frequency domain estimated data symbols
. Assuming a non-iterative receiver, we have:
where
is defined as follows:
Using the MRC receiver, as:
Using the EGC receiver, as:
A disadvantage of the ZF relies on the need to compute the pseudo-inverse of the channel matrix, for each frequency component, which corresponds to a high processing power capability. This article mitigates this limitation by using the MRC and EGC algorithms.
For m-MIMO, with
R≫1, with small correlation between the channels between different transmitting and receiving antennas, the elements outside the main diagonal of
are much lower than the ones at its diagonal, where
elements of the matrix
are defined as [
15]:
For MRC: .
For EGC: , that is, they have absolute value 1 and phase identical to the corresponding element of the matrix .
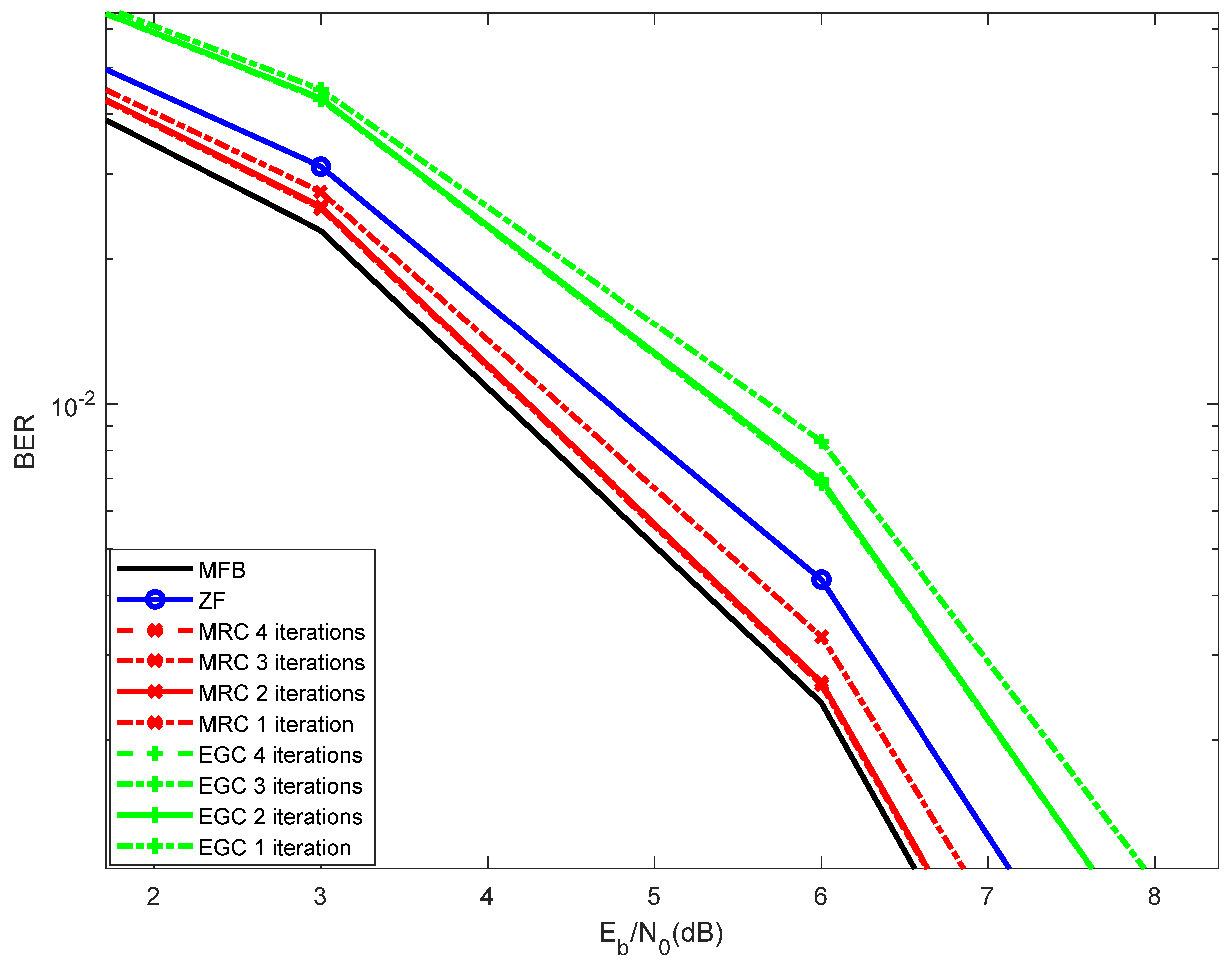
Based on
, we can implement the MRC or EGC, in the frequency domain. Nevertheless, for moderate values of
, the residual interference can still present a certain level. In order to mitigate this, we implement the iterative receiver (interference canceller), depicted in
Figure 2, as:
where the frequency domain estimated data symbols are
. The interference cancellation matrix
can be computed by
where
is an
identity matrix.
This interference canceller is implemented using
, with
denoting the frequency-domain average values conditioned to the FDE output for the previous iteration [
11], with
. Note that
can be obtained as defined in [
15].
For the first iteration, there is no information about the transmitted symbols and .
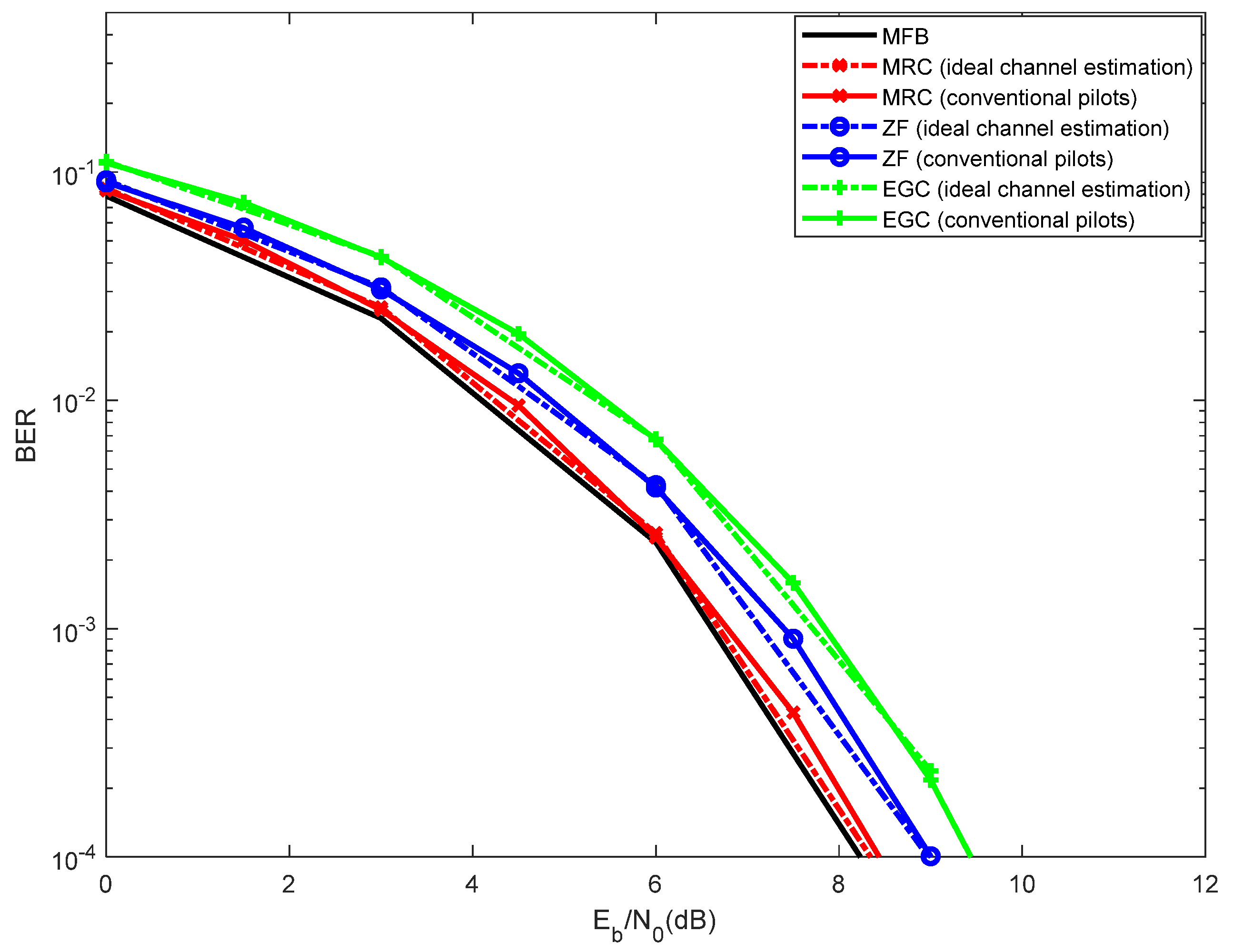
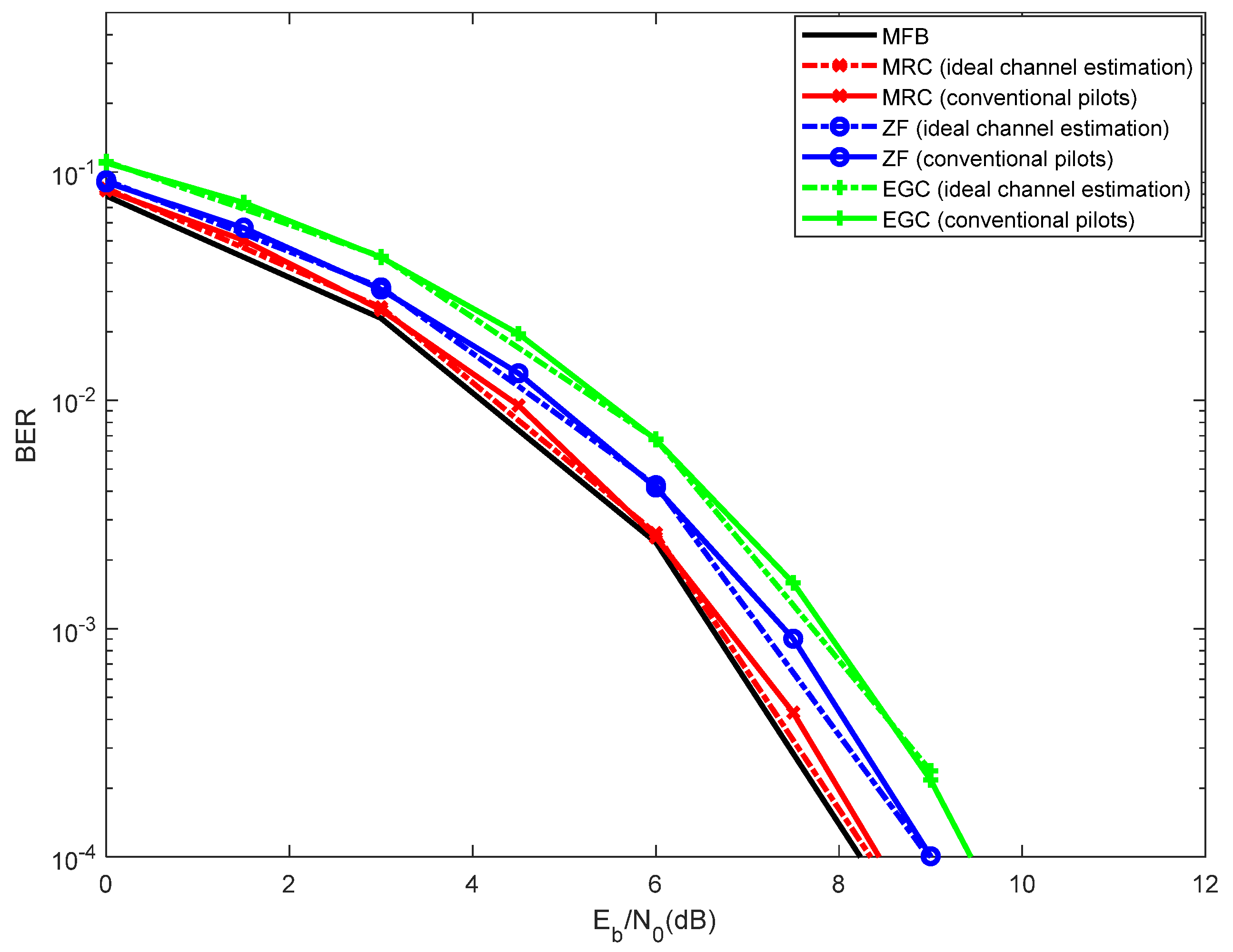
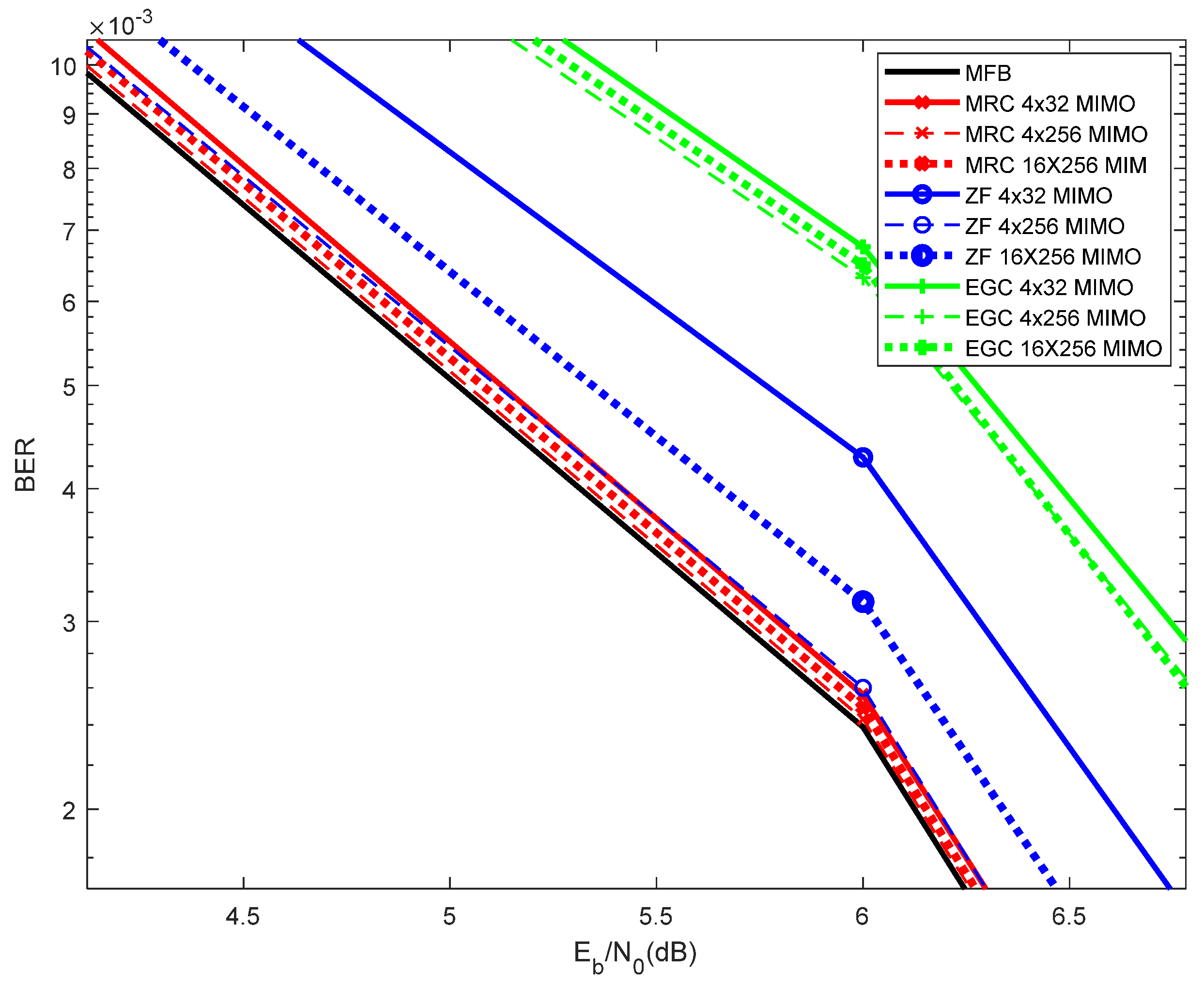
It is worth noting that an increase in the number of transmitting antennas results in an increase of the symbols rate. Moreover, increasing the number of receiving antennas results in an increase of diversity and, as a result, in performance improvement. Apart from the EGC and MRC, the Matched Filter Bound (MFB) curve is a way to measure the channel modeled by the sum of delayed and independently Rayleigh-fading rays [
15].
For a massive MIMO scheme with a large number of antennas at the receiver side, this technique does not require special pilot design. Nevertheless, a problem arises for a large number of transmit antennas with uncorrelated channels, since we should have orthogonal pilots for the different transmit antennas. This means switching off all antennas, but one in a successive way.
The proposed technique is generic, and valid for all frequencies, which are suitable for mm-Wave associated with massive MIMO, due to the smaller wavelength. This allows smaller antennas and packing more antennas in a given device. The main difference when mm-Wave is employed relies on the type of channel, which, in general, has a lower number of multipath components.
3. Channel Estimation
Let us first assume the use of conventional pilots, i.e., there is no data overlapping in the training block. Conventional pilots of training sequences comprise the periodic transmission of known symbols utilized by the receiver to compute the channel parameters that are required for equalization purposes. In this scenario, the channel frequency response is estimated by using [
11]:
where
denotes the signal at the
r-th received antenna
, and
denotes the pilot transmitted by the
t-th transmit antenna
. Moreover,
denotes the power of the pilots, i.e., training sequences (P stands for the pilot). It is assumed that [
21]
If the pilots associated to different transmit antennas are orthogonal, then there is no interference between antennas when estimating the corresponding channels (e.g., by using disjoint sets of subcarriers for different antennas). In this case, we have
Since the channel impulse response is shorter than the cyclic prefix (which is just a fraction of the block duration), we can employ the enhanced channel estimates as [
13]
where
if the
nth time-domain sample is inside the cyclic prefix and 0 otherwise. In this case, the SNR at the channel estimates is improved by a factor
T/
TG, with
T and
TG denoting the duration of the useful part of the block and the cyclic prefix, respectively.
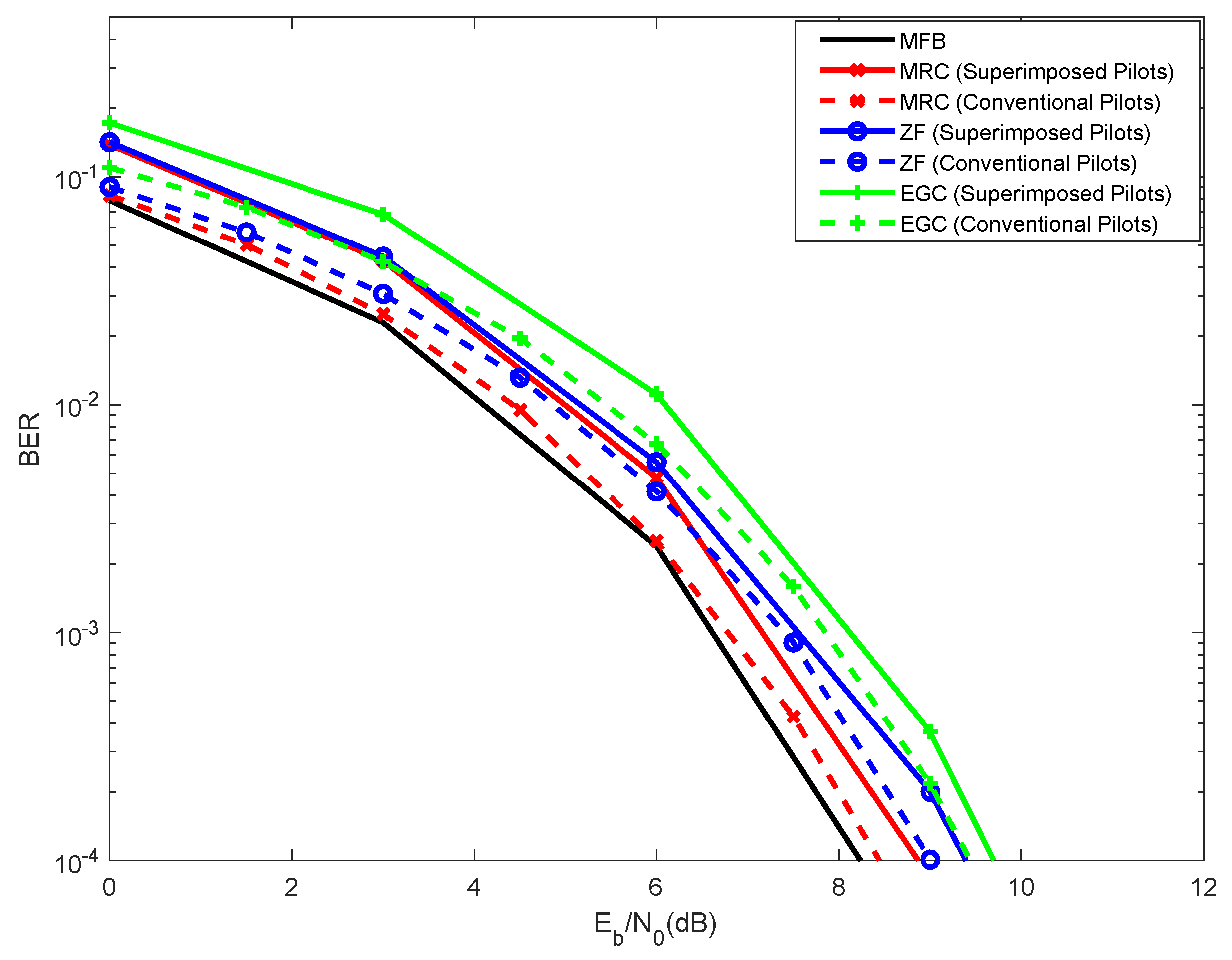
Let us consider now the use of superimposed pilots, i.e.,
for the subcarriers with pilots. Superimposed pilots suppress the overheads associated with channel estimation based on conventional pilot symbols, which tends to be more demanding in the case of m-MIMO, leading to a reduction in spectral efficiency. In the following, we will assume that [
21]
where
stands for the power of the data.
Let us assume a frame with
time-domain blocks, each with
N subcarriers. If the cyclic prefix of each FFT block has
samples, we will need
equally spaced frequency-domain pilots for the channel estimation. For pilot spacings in time and frequency
and
, respectively, the total number of pilots in the frame is given by
This means that we have a pilot multiplicity or redundancy of
To avoid significant performance degradation due to channel estimation errors, the SNR associated with the channel estimation, given by , should be much higher than the SNR for the data .
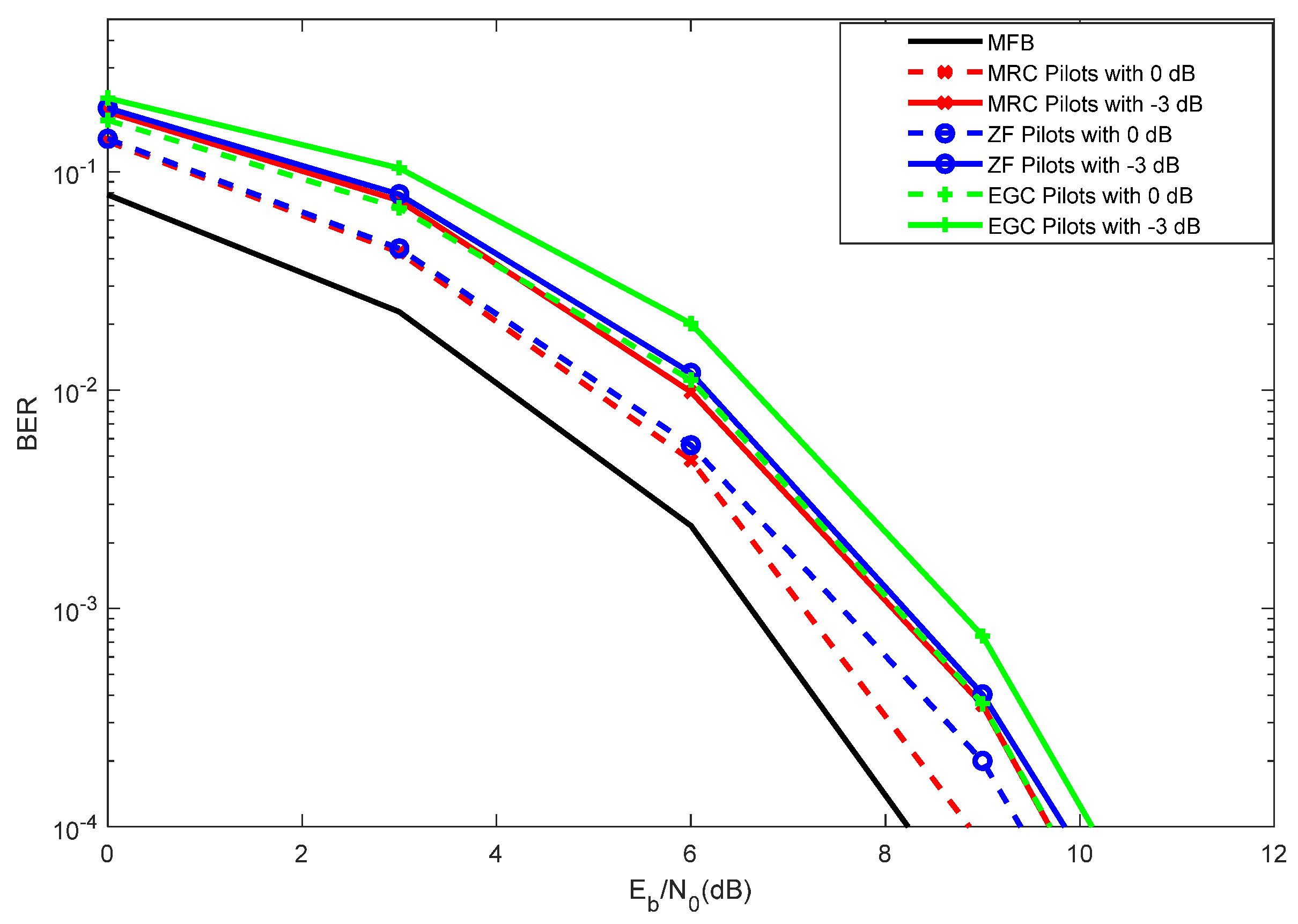
In this scenario, assuming superimposed pilots (pilots added to data), data will represent interference to the channel estimation obtained with the pilots, and the pilots will represent interference to the channel estimation obtained with the pilots, which leads to a degradation of performance. This can be mitigated by employing pilots with relatively low power and average the pilots over a large number of blocks, so as to obtain accurate channel estimates (the window size should be such that the channel should be constant within it). Since different data blocks are uncorrelated and the data symbols have usually zero mean, this approach tends to be very efficient.
Therefore, the channel is initially estimated from the pilots, and then we remove the interference (pilots) from the received signal to detect the data symbols.
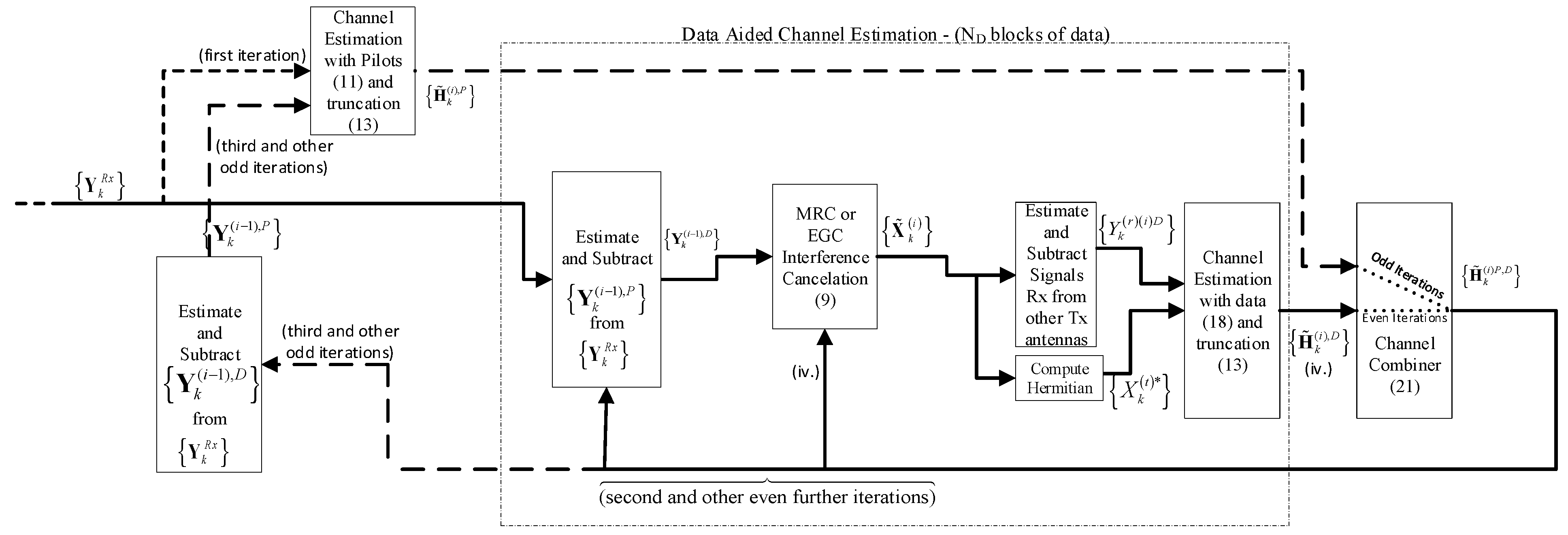
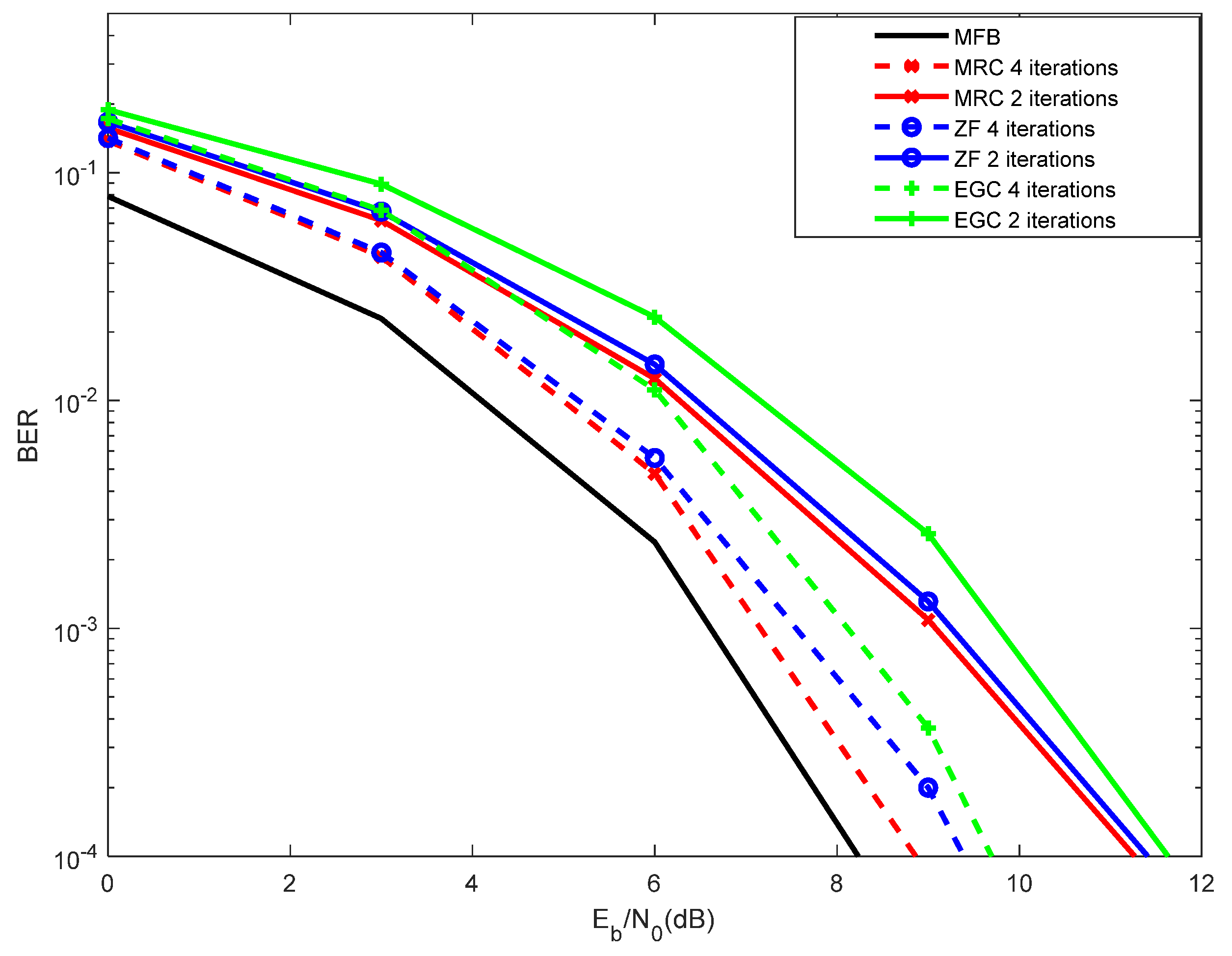
The procedure for obtaining the channel estimates follow iteratively the following three steps (see indexes in the chains of
Figure 3):
Obtain the channel estimates from the pilots (remove the data from the received signal, estimated from the previous iteration, if not the first iteration);
Obtain the channel estimates from the data, after removing the pilots from the received signal (which represents interference);
Combine the channel estimates obtained from 1. and 2., to improve the estimate of the channel, and repeat the process.
For the first iteration (step 1), an initial channel estimation is obtained by correlating the received signal
with the pilots, by using Equations (13) and then (16). As described above, if this is not the first iteration, then the data symbols are removed from the received blocks, as:
and the channel estimation is calculated by using Equations (13) and (16).
For the second iteration (step 2), the pilots are removed from the received blocks, as
and the average values of the data symbols will be used as pilots for obtaining the channel frequency response estimate, as in [
11]
Since using
might lead to noise enhancement effects in the channel estimates when
is small, we will consider
as defined in (4). If we have moderate to high SNR then
and we could use
. Note that we employ pilots with relatively low power, and we average the pilots over a large number of blocks so as to obtain accurate channel estimates.
The computation of Equation (22) corresponds to an improved channel estimate obtained with the data estimated from the previous iteration is very effective because the data symbols have usually zero mean and different data blocks are uncorrelated. Naturally, there are limitations on the length of this averaging window, since the channel should be constant within it.
Finally, following step 3, the channel estimates obtained from the pilots (
) and from the data aided (
), can be combined to provide the normalized channel estimates with minimum error variance [
14], as defined by
where




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}