
An Unsupervised Machine Learning Approach for UAV-Aided Offloading of 5G Cellular Networks




Abstract
:1. Introduction
1.1. Background
1.2. Contributions
- A novel UAV-aided offloading framework is proposed, in the context of an overloaded terrestrial 5G network. The offloading procedure can be regarded as a cluster formulation problem that can be dealt with unsupervised machine learning-based methods. To the best of the authors’ knowledge, this is the first time that the k-medoid algorithm is utilized in this context.
- A clustering selection scheme is proposed, which is formulated as an optimization problem to further enhance the offloading procedure under a limited number of available UAV-BSs.
- The proposed scheme mainly increases the offloading percentage as well as the spectral efficiency and, at the same time, improves the received signal strength, as compared to random or planned picocells deployment strategies and the k-means algorithm for the cluster formulation problem.
- The impact of the increased localization inaccuracy of the UEs on the proposed framework is evaluated. Also, comparisons concerning the performance of the proposed method with another state-of-the-art unsupervised machine learning method are illustrated and discussed.
1.3. Structure
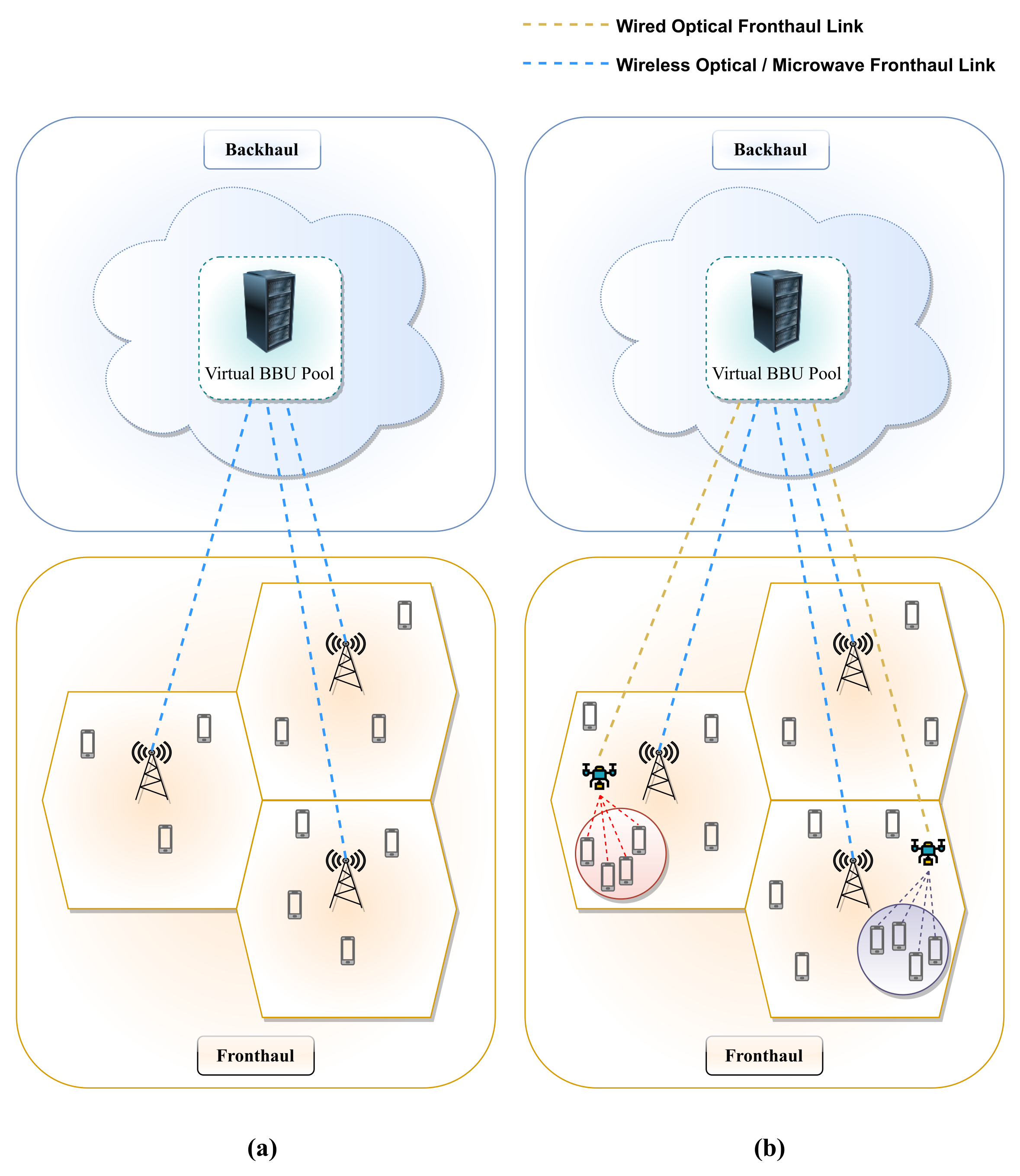
2. System Model
3. UAV-BS Deployment Process (UDP)
3.1. User Clustering Process (UCP)
| Algorithm 1 User Clustering Process (UCP). |
|
3.2. Clustering Selection Process (CSP)
| Algorithm 2 Clustering Selection Process (CSP). |
|
4. Performance Evaluation
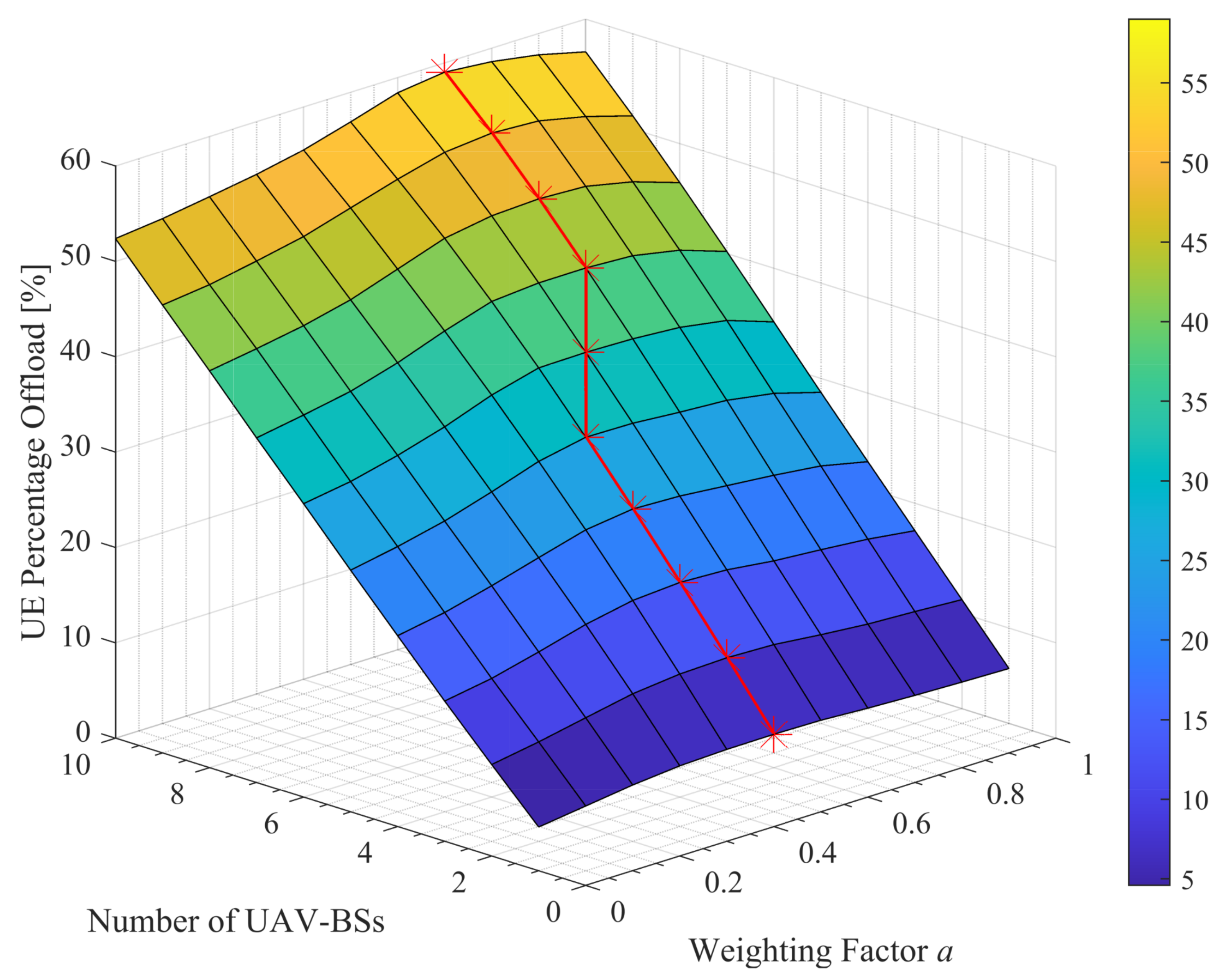
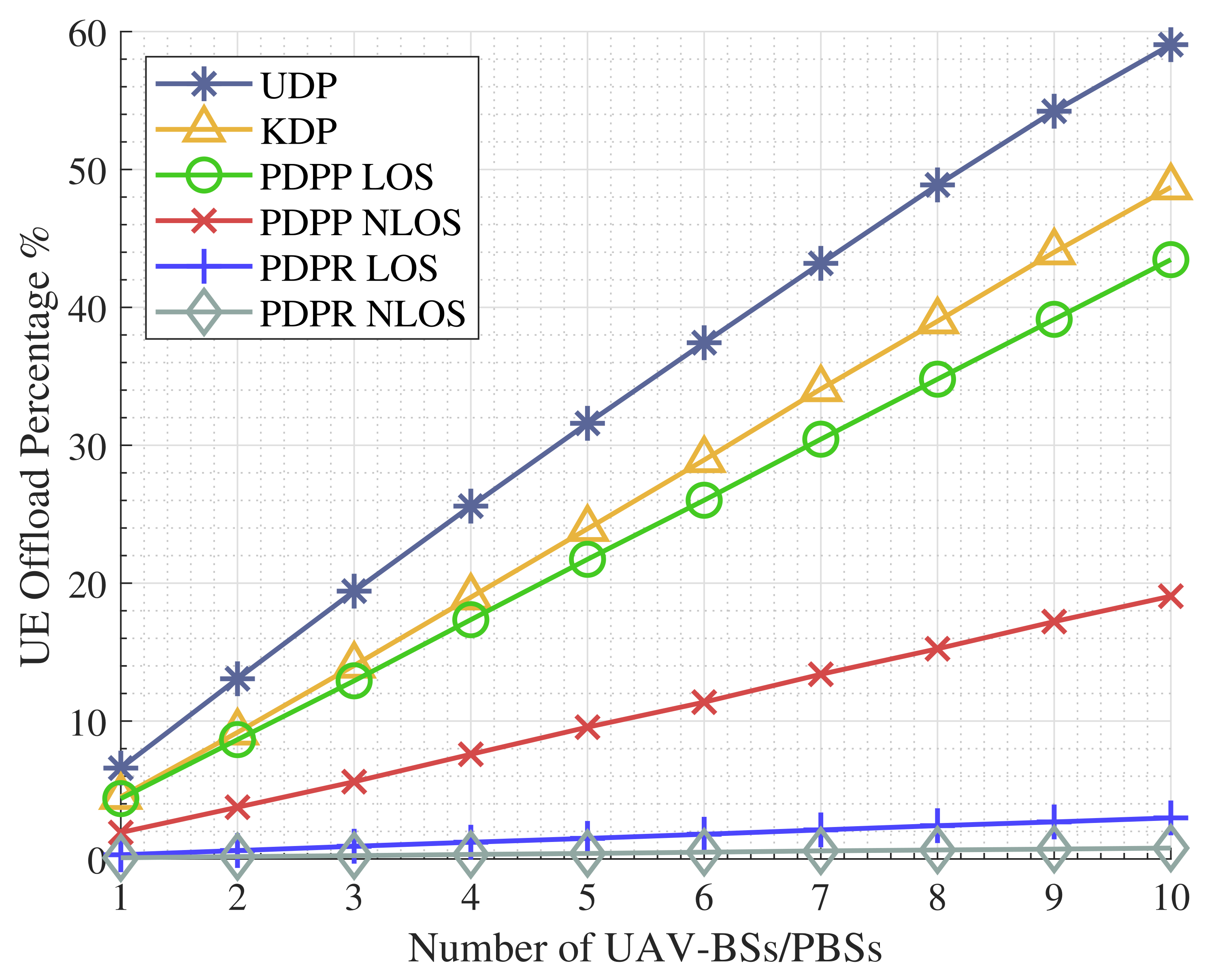
4.1. Comparative Evaluation of UDP in Terms of Offloading Percentage
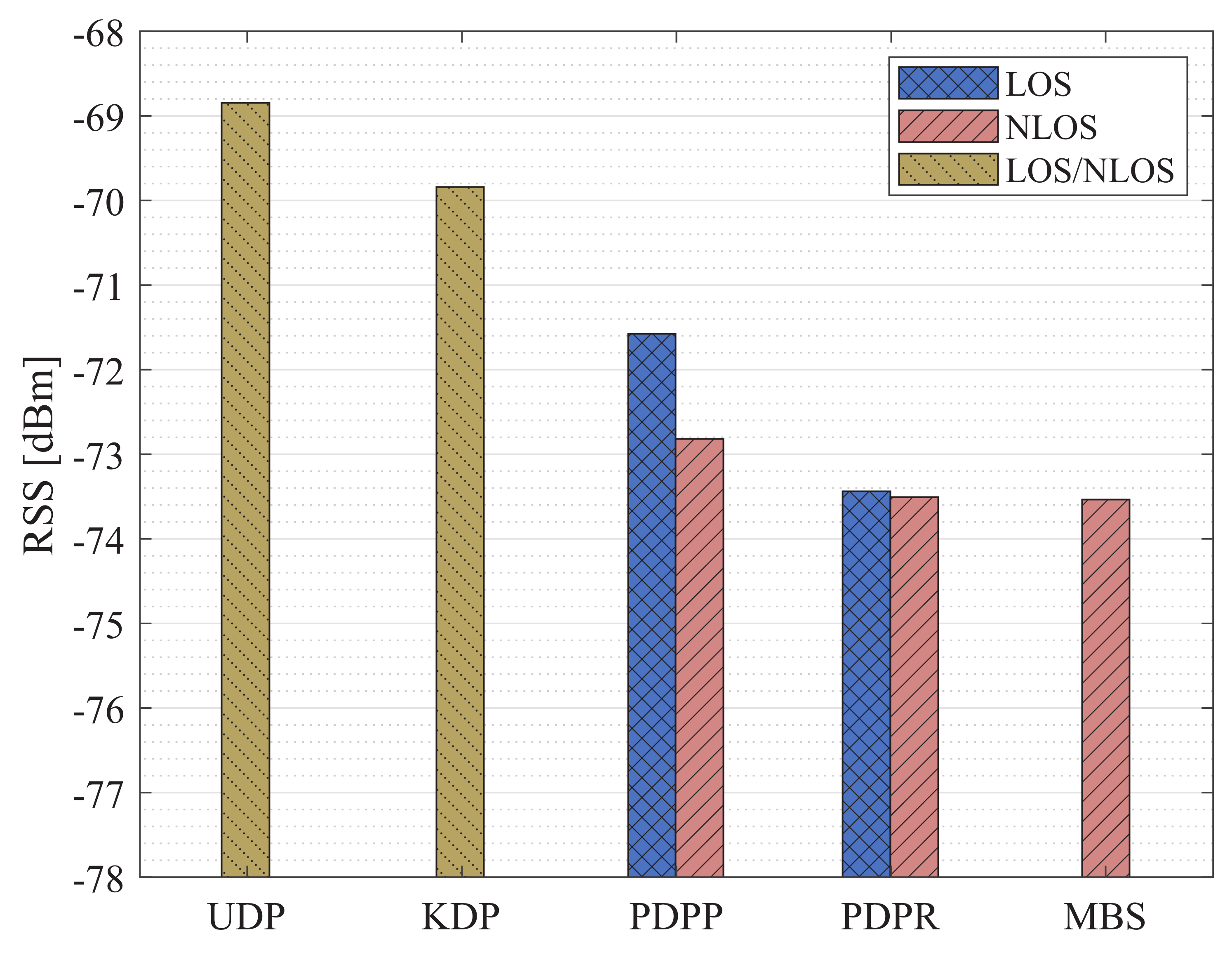
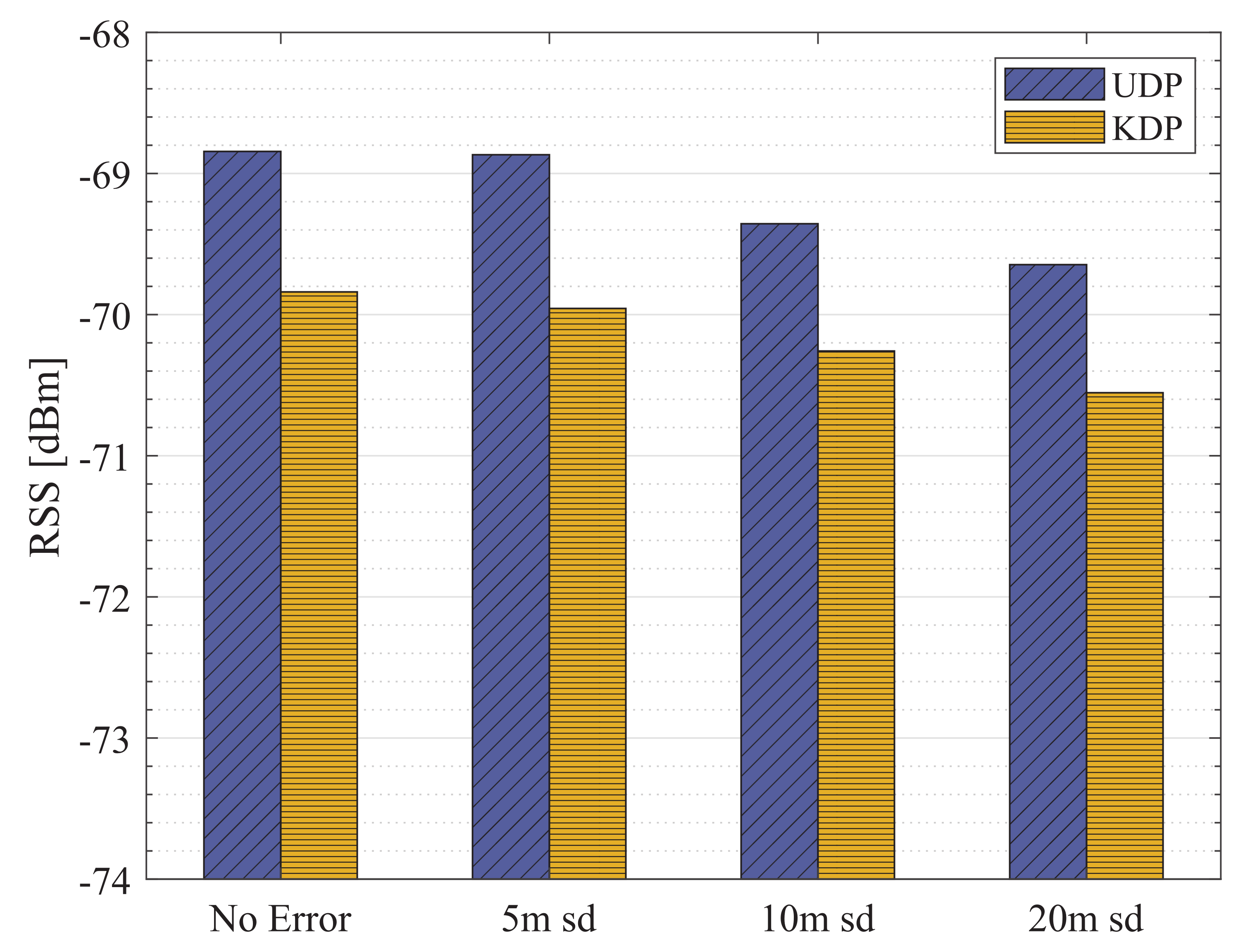
4.2. Comparative Evaluation of UDP in Terms of the Received Signal Strength (RSS)
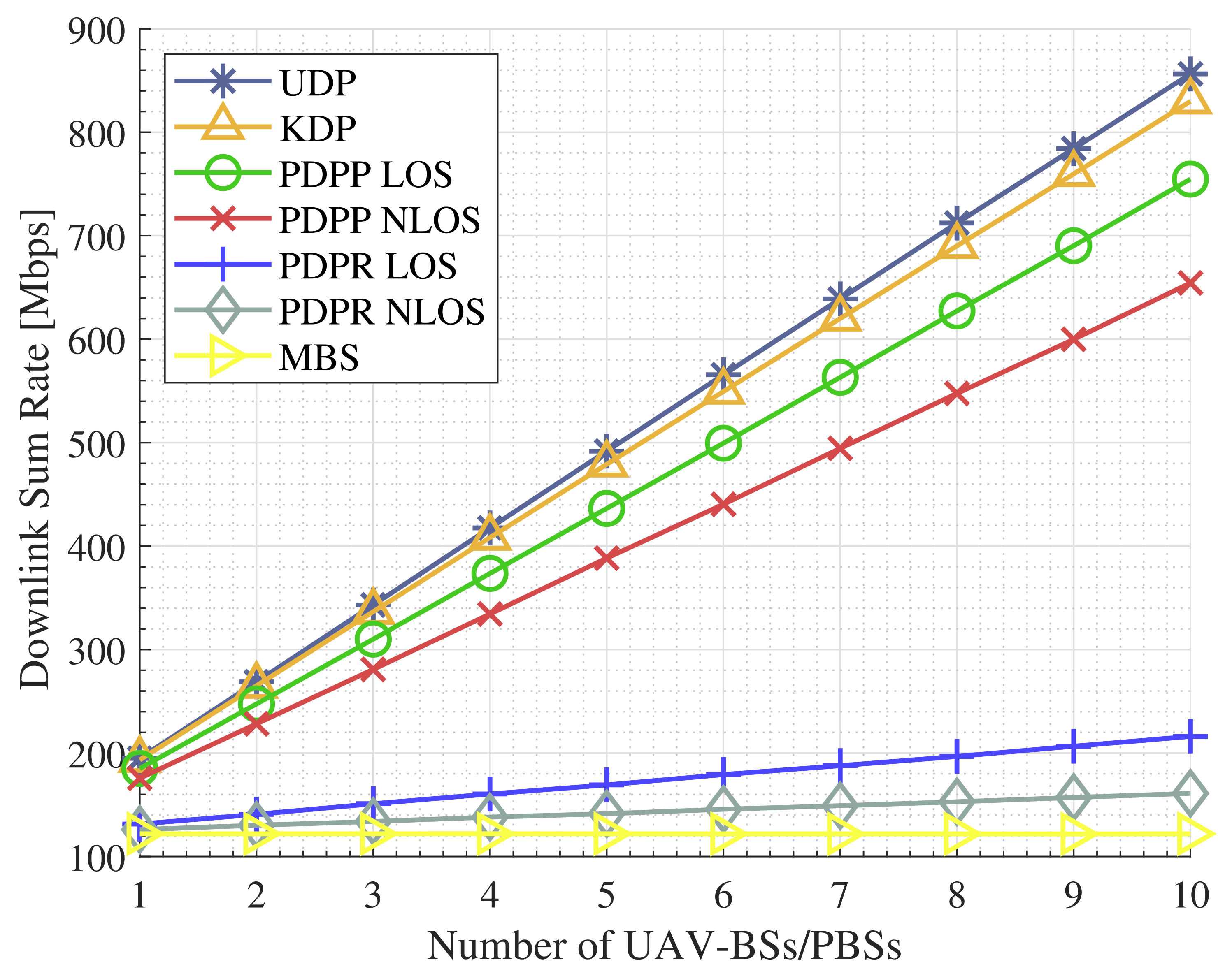
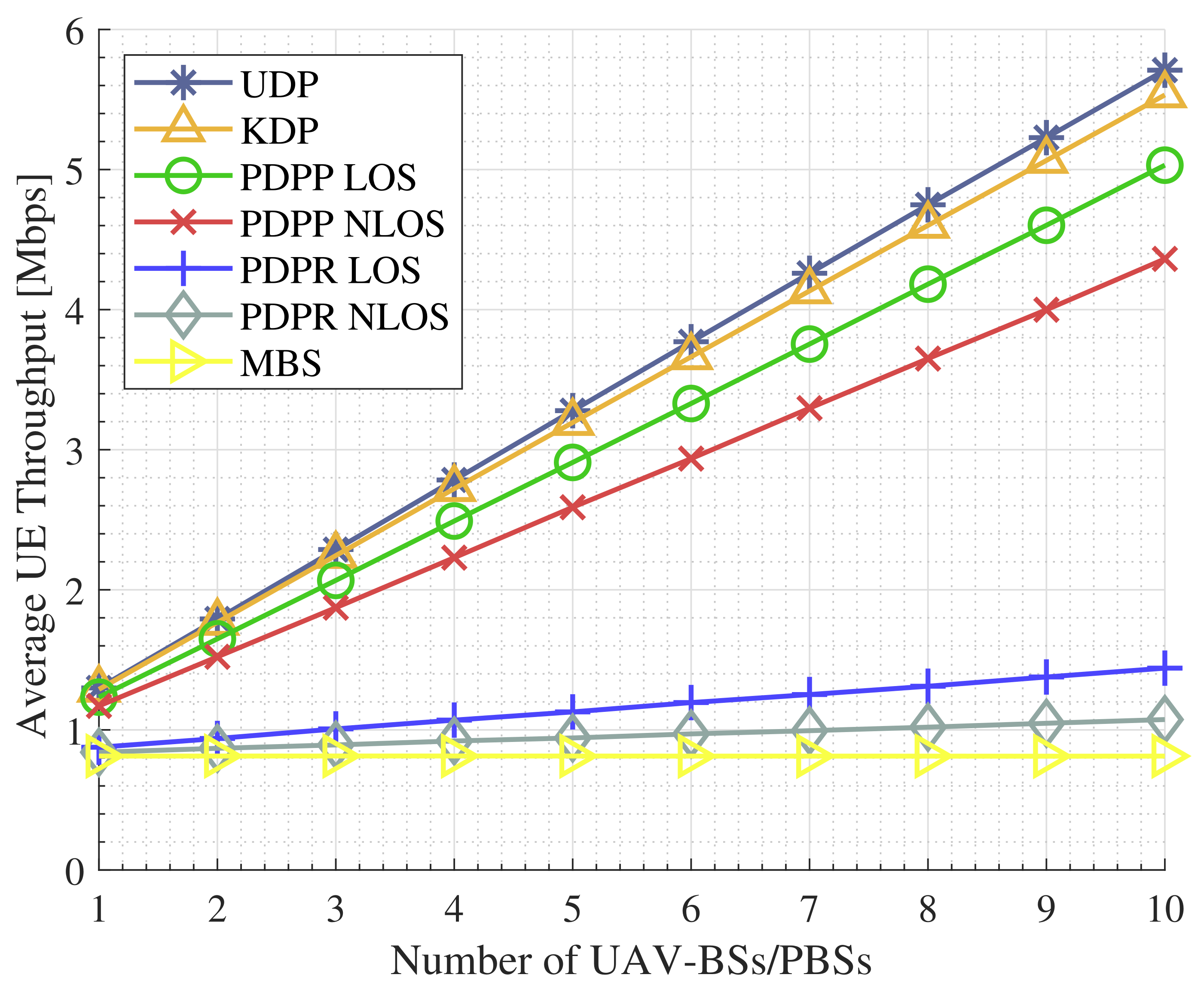
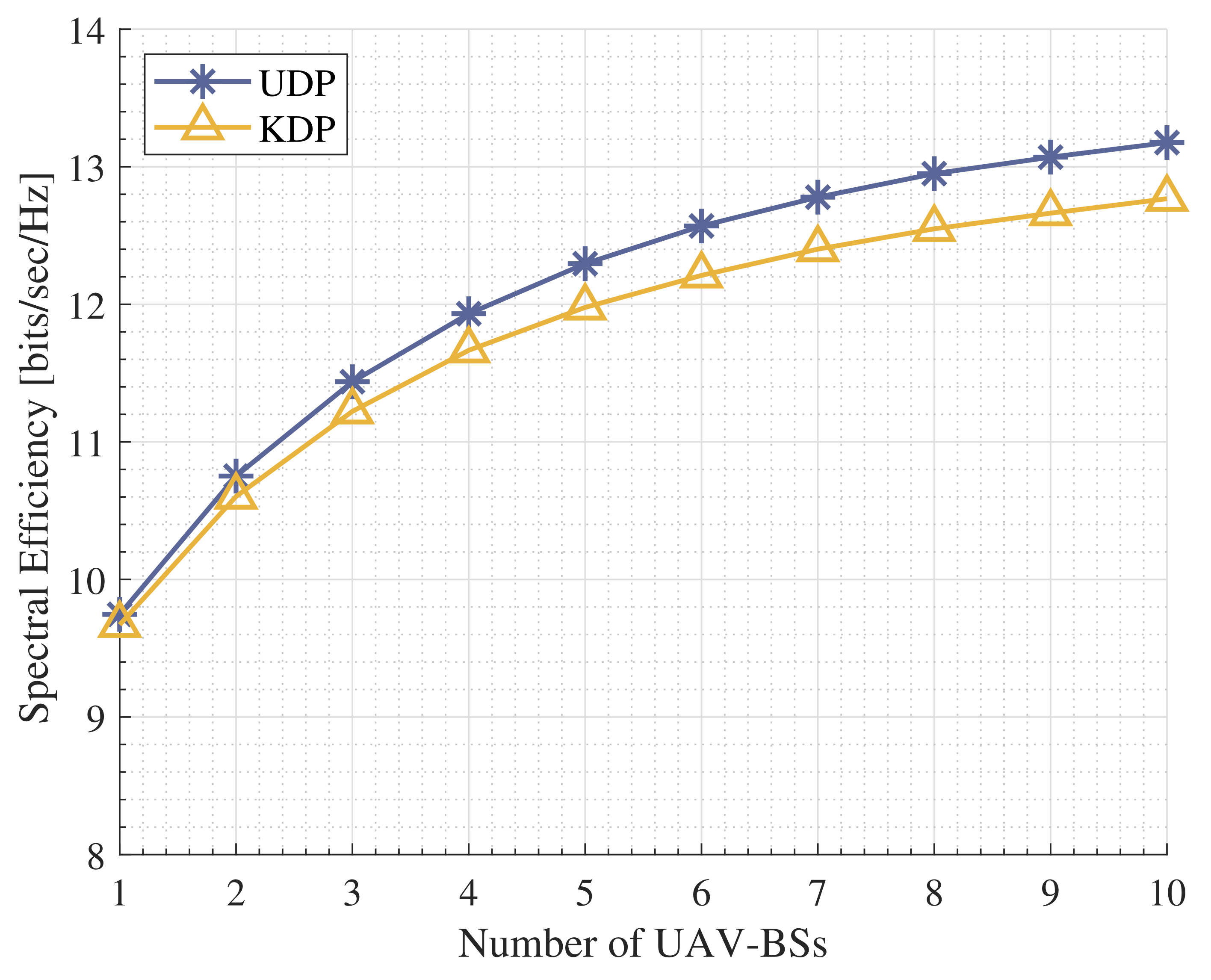
4.3. Comparative Evaluation of UDP in Terms of System Sum Rate, User Average throughput, and Spectral Efficiency
4.4. Comparative Evaluation of UDP under Increased Localization Inaccuracy
5. Conclusion and Future Directions
5.1. Conclusions
5.2. Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CSP | Clustering Selection Process |
| GBS | Ground Base Station |
| H-CRAN | Heterogeneous Cloud Radio Access Network |
| IoT | Internet of Things |
| JTO | Joint Traffic Offloading |
| KDP | K-means Deployment Process |
| LOS | Line of Sight |
| LTE | Long Term Evolution |
| MBS | Macro Base Station |
| MmWave-NOMA | Millimeter Wave Non Orthogonal Multiple Access |
| MTs | Mobile Terminals |
| NLOS | Non Line of Sight |
| OFDM | Orthogonal Frequency Division Multiplexing |
| PBS | Pico Base Station |
| PDPP | Picocell Deployment Process Planned |
| PDPR | Picocell Deployment Process Randomly |
| QoS | Quality of Service |
| RRH | Remote Radio Head |
| RSS | Received Signal Strength |
| SAGIN | Space-Air-Ground Integrated Networks |
| SWIPT | Simultaneous Wireless Information and Power Transfer |
| UAV | Unmanned Aerial Vehicle |
| UAV-BSs | UAV Base Stations |
| UDP | UAV-BS Deployment Process |
| UE | User Equipment |
| UCP | User Clustering Proces |
| WS | Weighted Score |
References
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A Survey on Machine-Learning Techniques for UAV-Based Communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cao, X.; Yang, P.; Alzenad, M.; Xi, X.; Wu, D.; Yanikomeroglu, H. Airborne Communication Networks: A Survey. IEEE J. Sel. Areas Commun. 2018, 36, 1907–1926. [Google Scholar] [CrossRef]
- Elsawy, H.; Hossain, E.; Kim, D.I. HetNets with cognitive small cells: User offloading and distributed channel access techniques. IEEE Commun. Mag. 2013, 51, 28–36. [Google Scholar] [CrossRef]
- Hoadley, J.; Maveddat, P. Enabling small cell deployment with HetNet. IEEE Wirel. Commun. 2012, 19, 4–5. [Google Scholar] [CrossRef]
- Wang, L.; Chao, Y.; Cheng, S.; Han, Z. An Integrated Affinity Propagation and Machine Learning Approach for Interference Management in Drone Base Stations. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 83–94. [Google Scholar] [CrossRef]
- Chabbouh, O.; Rejeb, S.B.; Choukair, Z.; Agoulmine, N. Offloading decision algorithm for 5G/HetNets cloud RAN. In Proceedings of the 24th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 22–24 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, L.; Luan, Y.; Cheng, X.; Xing, H.; Liu, Y.; Jiang, X.; Chen, W.; Chao, K. Self-optimised joint traffic offloading in heterogeneous cellular networks. In Proceedings of the 16th International Symposium on Communications and Information Technologies (ISCIT), Qingdao, China, 26–28 September 2016; pp. 263–267. [Google Scholar] [CrossRef]
- Omran, A.; Sboui, L.; Kadoch, M.; Chang, Z.; Lu, J.; Liu, R. 3D Deployment of Multiple UAVs for Emergent On-Demand Offloading. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020; pp. 692–696. [Google Scholar] [CrossRef]
- Qin, Y.; Kishk, M.A.; Alouini, M.S. Performance evaluation of uav-enabled cellular networks with battery-limited drones. IEEE Commun. Lett. 2020, 24, 2664–2668. [Google Scholar] [CrossRef]
- Hu, Z.; Zheng, Z.; Song, L.; Wang, T.; Li, X. UAV Offloading: Spectrum trading contract design for UAV-Assisted cellular networks. IEEE Trans. Wirel. Commun. 2018, 17, 6093–6107. [Google Scholar] [CrossRef]
- Lyu, J.; Zeng, Y.; Zhang, R. UAV-Aided Offloading for Cellular Hotspot. IEEE Trans. Wirel. Commun. 2018, 17, 3988–4001. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Wang, J.; Zhu, H.; Gomes, N.J.; Cheng, W.; Yue, P.; Yi, X. Machine Learning based Network Planning in Drone Aided Emergency Communications. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020. [Google Scholar] [CrossRef]
- Qu, H.; Zhang, W.; Zhao, J.; Luan, Z.; Chang, C. Rapid Deployment of UAVs Based on Bandwidth Resources in Emergency Scenarios. In Proceedings of the Rapid Deployment of UAVs Based on Bandwidth Resources in Emergency Scenario, Nanjing, China, 29–31 May 2020; pp. 86–90. [Google Scholar] [CrossRef]
- Cui, J.; Khan, M.B.; Deng, Y.; Ding, Z.; NaIlanathan, A. Unsupervised Learning Approaches for User Clustering in NOMA enabled Aerial SWIPT Networks. In Proceedings of the IEEE 20th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Cannes, France, 2–5 July 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Qi, W.; Zhang, B.; Chen, B.; Zhang, J. A user-based K-means clustering offloading algorithm for heterogeneous network. In Proceedings of the IEEE 8th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018; pp. 307–312. [Google Scholar] [CrossRef]
- Mandloi, D.; Rajeev, A. Seamless connectivity with 5G enabled unmanned aerial vehicles base station using machine programming approach. Expert Syst. 2021, e12828. [Google Scholar] [CrossRef]
- Tang, F.; Hofner, H.; Kato, N.; Kaneko, K.; Yamashita, Y.; Hangai, M. A Deep Reinforcement Learning based Dynamic Traffic Offloading In Space-Air-Ground Integrated Networks (SAGIN). IEEE J. Sel. Areas Commun. 2021, 40, 276–289. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, H.; Xiong, J.; Ma, D.; Zhao, H. Concise and Informative Article Title Throughput Maximization through Joint User Association and Power Allocation for a UAV-Integrated H-CRAN. Wirel. Commun. Mob. Comput. 2021, 2021, 6668756. [Google Scholar] [CrossRef]
- Schubert, E.; Rousseeuw, P.J. Faster k-Medoids Clustering: Improving the PAM, CLARA, and CLARANS Algorithms; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Hossain, M.F.; Mahin, A.U.; Debnath, T.; Mosharrof, F.B.; Islam, K.Z. Recent research in cloud radio access network (C-RAN) for 5G cellular systems-A survey. J. Netw. Comput. Appl. 2019, 139, 31–48. [Google Scholar] [CrossRef]
- Alzenad, M.; Shakir, M.Z.; Yanikomeroglu, H.; Alouini, M. FSO-Based Vertical Backhaul/Fronthaul Framework for 5G+ Wireless Networks. IEEE Commun. Mag. 2018, 56, 218–224. [Google Scholar] [CrossRef] [Green Version]
- Wilson, H.; Boots, B.; Millward, A. A comparison of hierarchical and partitional clustering techniques for multispectral image classification. IEEE Int. Geosci. Remote. Sens. Symp. (IGARSS) 2002, 3, 1624–1626. [Google Scholar]
- Galkin, B.; Kibilda, J.; DaSilva, L.A. Deployment of UAV-mounted access points according to spatial user locations in two-tier cellular networks. In Proceedings of the Wireless Days (WD), Toulouse, France, 23–25 March 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Moraitis, N.; Tsipi, L.; Vouyioukas, D.; Gkioni, A.; Louvros, S. Performance evaluation of machine learning methods for path loss prediction in rural environment at 3.7 GHz. Wirel. Netw. 2021, 27, 4169–4188. [Google Scholar] [CrossRef]
- 3GPP, Further Advancements for E-UTRA Physical Layer Aspects (Release 9), TR 36.814 V9.2.0 (2017-03). Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2493 (accessed on 5 December 2021).
- Zhang, H.; Song, L.; Han, Z. Unmanned Aerial Vehicle Applications over Cellular Networks for 5G and Beyond; Springer: Cham, Switzerland, 2020. [Google Scholar]
- Karavolos, M.; Nomikos, N.; Vouyioukas, D. Enhanced Integrated Satellite-Terrestrial NOMA with Cooperative Device-to-Device Communication. Telecom 2020, 1, 126–149. [Google Scholar] [CrossRef]
- Vaghefi, R.; Buehrer, R. Improving positioning in LTE through collaboration. In Proceedings of the 11th Workshop on Positioning, Navigation and Communication (WPNC), Dresden, Germany, 12–13 March 2014; pp. 1–6. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Simulated frames | 100,000 |
| Number of MBSs M | 3 |
| Number of UEs N | 150 |
| Number of UAV-BSs/PBSs | 1–10 |
| Number of UE hotspots H | 1–10 |
| MBS downlink operating frequency | 2 GHz |
| UAV-BS downlink operating frequency | 1.8 GHz |
| MBS Transmit power | 43 dBm |
| UAV-BS Transmit power | 23 dBm |
| Area of interest W | 4.5 km × 4.5 km |
| MBS Cell Radius | 1.27 km |
| MBS Path loss model (NLOS) | dB |
| Path loss model (NLOS) for PBS | dB |
| Path loss model (LOS) for PBS | dB |
| Path loss model (LOS/NLOS) for UAV-BS | Elevation Angle-Based Model [26] |
| Terrestrial Environment | Urban |
| UE receive antenna gain | 0 dBi |
| MBS transmit antenna gain | 15 dBi |
| UAV-BS transmit antenna gain | 0 dBi |
| PBS transmit antenna gain | 0 dBi |
| Terrestrial Environment | Urban |
| Log-Normal Shadowing | 6 dB |
| Bandwidth with } | 5 MHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsipi, L.; Karavolos, M.; Vouyioukas, D. An Unsupervised Machine Learning Approach for UAV-Aided Offloading of 5G Cellular Networks. Telecom 2022, 3, 86-102. https://doi.org/10.3390/telecom3010005
Tsipi L, Karavolos M, Vouyioukas D. An Unsupervised Machine Learning Approach for UAV-Aided Offloading of 5G Cellular Networks. Telecom. 2022; 3(1):86-102. https://doi.org/10.3390/telecom3010005
Chicago/Turabian StyleTsipi, Lefteris, Michail Karavolos, and Demosthenes Vouyioukas. 2022. "An Unsupervised Machine Learning Approach for UAV-Aided Offloading of 5G Cellular Networks" Telecom 3, no. 1: 86-102. https://doi.org/10.3390/telecom3010005
APA StyleTsipi, L., Karavolos, M., & Vouyioukas, D. (2022). An Unsupervised Machine Learning Approach for UAV-Aided Offloading of 5G Cellular Networks. Telecom, 3(1), 86-102. https://doi.org/10.3390/telecom3010005