




6G Goal-Oriented Communications: How to Coexist with Legacy Systems?

 , ,
, ,
Abstract
1. Introduction
- goal-oriented data compression [11,18,19,20,21,22,23,24,25,26,27,28], aiming at extracting and adapting the relevant information needed to make the receiver accomplish a goal with desired effectiveness. This can be based on semantic information extraction [22,28,29], but it is not restricted to the meaning of data;
- goal-oriented transmission [30,31,32], aiming at adapting communication reliability (e.g., the Packet Error Rate—PER), to achieve target goal effectiveness, i.e., the probability of achieving the goal. This can also involve semantic-aware packet protection, under the assumption that some packets bring more relevant information than others, from the perspective of the goal.
1.1. Related Work
1.2. Our Contribution
- We consider the communication effectiveness in accomplishing a predefined goal/task as our system constraint. Therefore, the focus of our work is on GO communications (i.e., effectiveness of communication toward achieving a goal—and in particular through resource allocation) rather than semantic communications (i.e., understanding the meaning of data).
- We introduce the edge inference service as the main use case under investigation, defining it as a GO communication service and problem.
- We consider the communication reliability (i.e., Packet Error Rate—PER) as a variable to be controlled to achieve target goal effectiveness at the GO system while maximizing performance of the DO system in terms of data rate.
- We propose a computation resource-aware method for guaranteeing goal effectiveness, taking into account the computing resource availability for edge inference.
1.3. Organization of the Paper
1.4. Notation and Acronyms
2. Definition of a Goal
2.1. The Goal Value, Achievability and Effectiveness
Goal Achievability and Goal Effectiveness
2.2. The Goal Cost
2.3. Identifying Goal-Achieving Communication KPIs
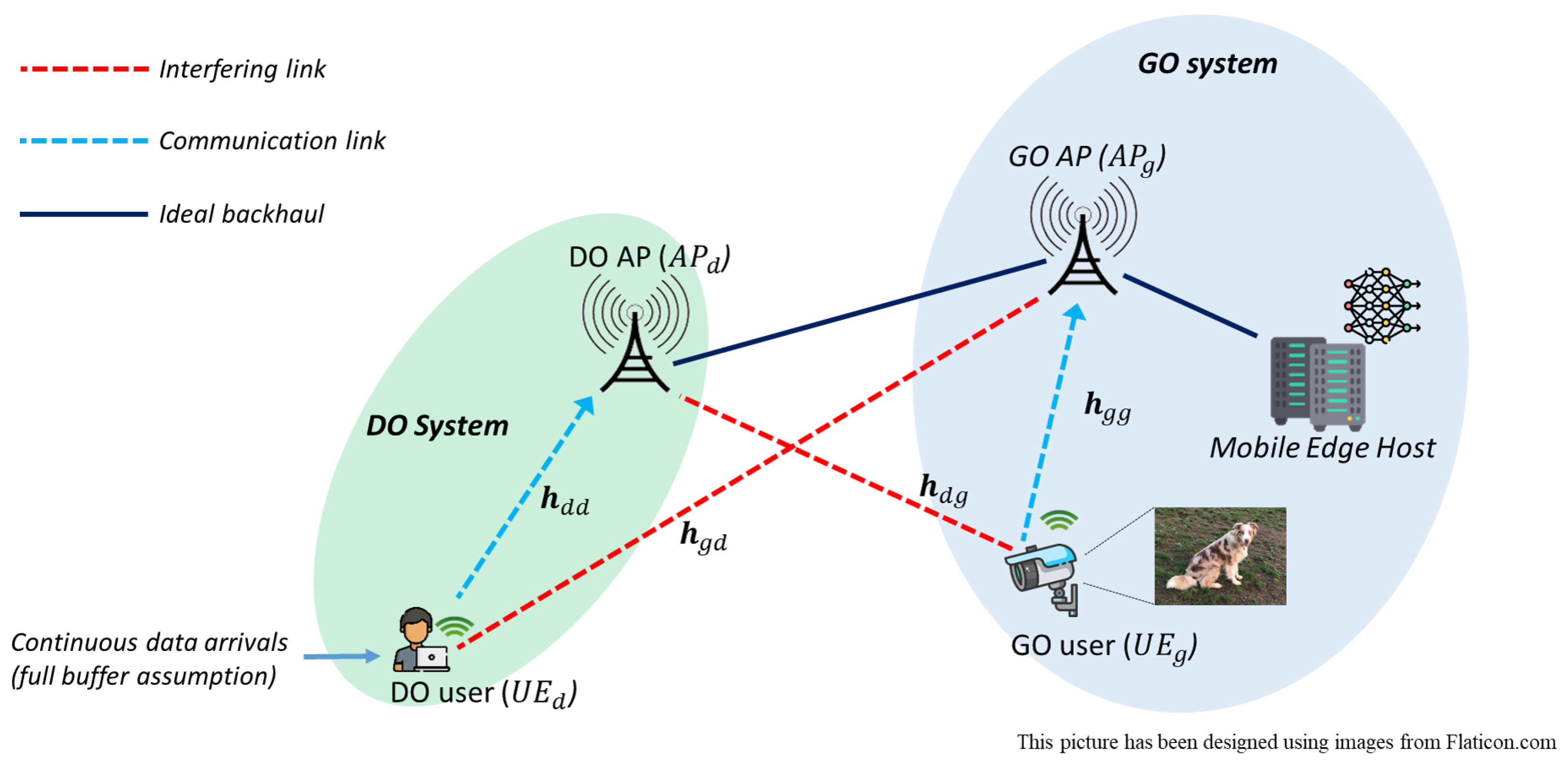
3. Coexistence of a Goal-Oriented and a Data-Oriented Communication System
3.1. System Setup
3.2. Edge Inference: Goal Value and Effectiveness
3.2.1. Uplink Radio Performance of GO User
3.2.2. Computation Delay of GO User
3.2.3. On the Use of Entropy to Define the Goal Value
3.3. The DO User Data Rate Loss as Goal Cost
3.4. Evaluation of the System without Optimization
3.4.1. Wireless Communications Assumptions
3.4.2. Data Set and Inference Assumptions
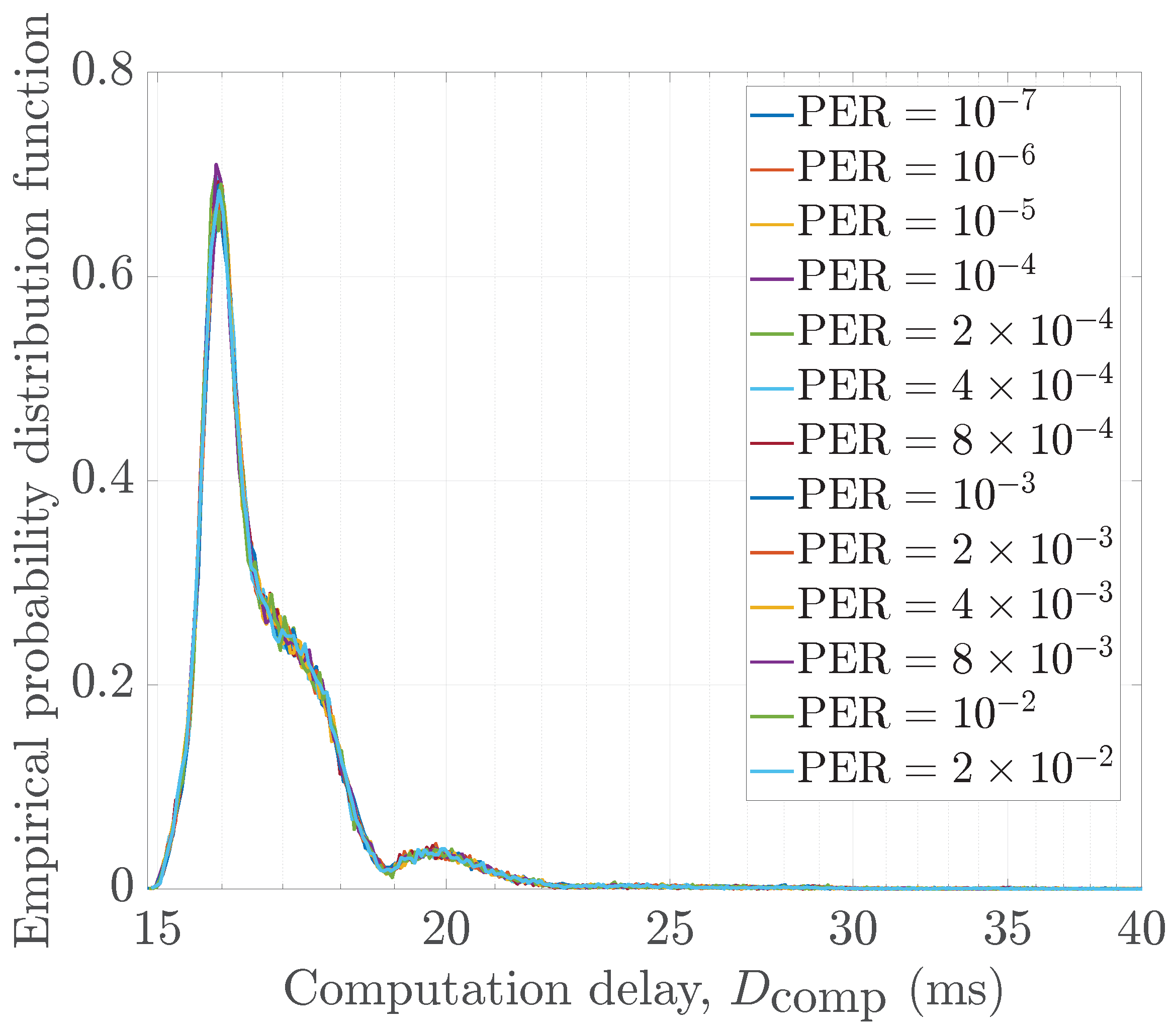
3.4.3. Computation Delay Assumption
3.4.4. The Goal Effectiveness from the Goal-Value Perspective
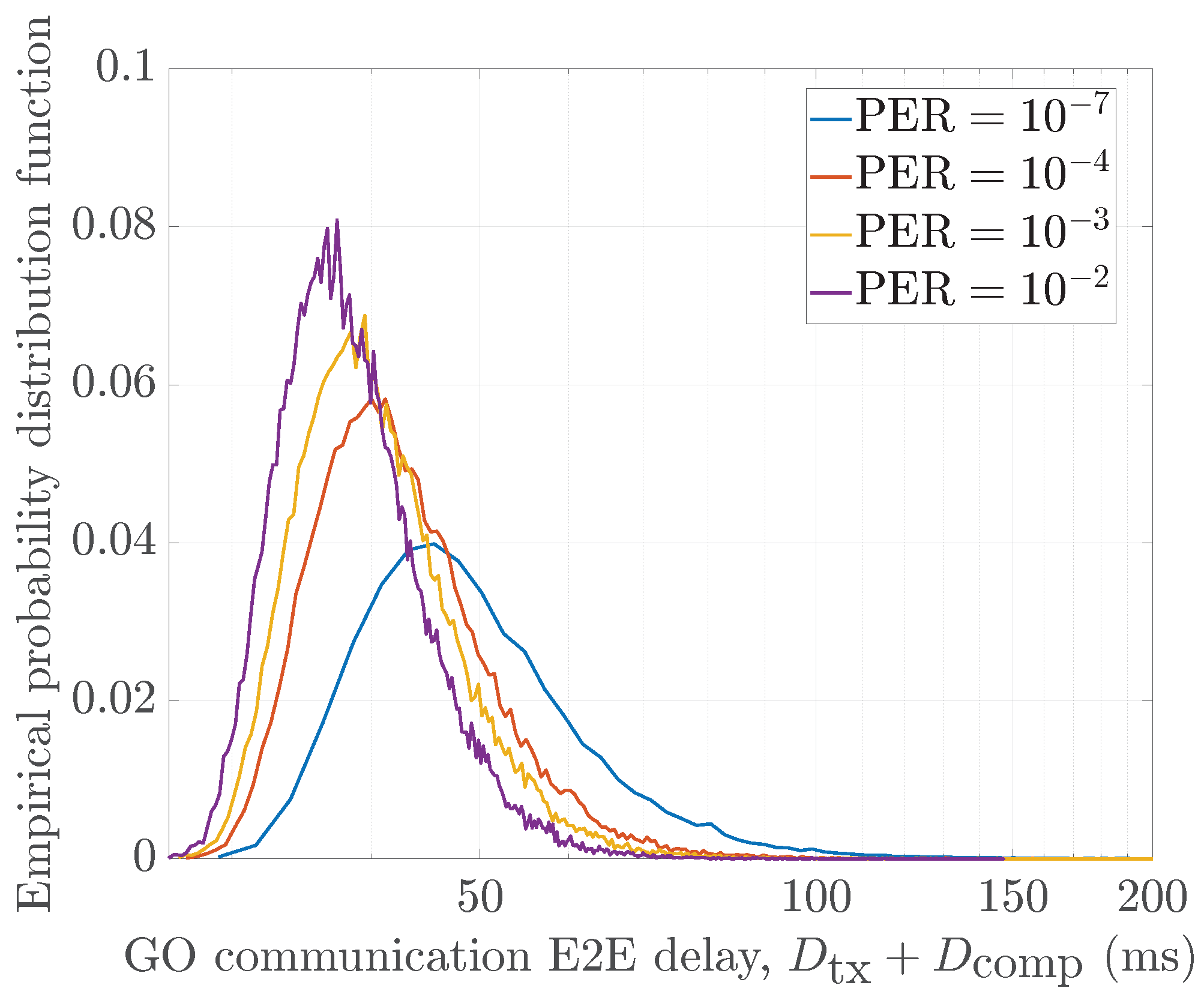
3.4.5. The Goal Effectiveness from the Delay Perspective
- From a goal-value perspective, the goal effectiveness is only affected by the PER (although not strongly, depending on the PER value), and a higher PER (i.e., lower communication reliability) leads to lower (partial) goal effectiveness; also, from to , stable performance is experienced.
- From an E2E-delay perspective, the goal effectiveness is affected by the PER and the DO user interference, and higher PER (i.e., lower communication reliability) leads to higher (partial) goal effectiveness.
3.4.6. The Goal Effectiveness and its Dependence on PER, Interference and Goal Cost
- The goal effectiveness increases as the delay threshold (y-axis) increases (for each fixed target PER), while it does not necessarily decrease as a function of the PER, as expected and shown before in the disjoint plots, creating goal effectiveness feasibility regions, whose surface depends on .
- Given a goal-effectiveness requirement, there always exists a minimum E2E delay threshold guaranteeing feasibility; whereas, below this threshold, it is infeasible (for any PER) to guarantee the requirement (examples of this point are shown by the red arrows in the figures). Moreover, each target PER experiences a different minimum that can be guaranteed. The lower the PER is, the higher the minimum feasible delay is.
- As the delay threshold decreases, the feasible region in terms of PER also shrinks, i.e., with a lower delay constraint, higher PER values are needed to guarantee effectiveness; however, this is not always feasible due to the goal value constraint (see, e.g., Figure 7c).
- As a consequence of the previous remark, as the PER decreases (y-axis), the minimum delay threshold to guarantee a target goal effectiveness increases, i.e., to guarantee lower PER (reliable communication), needs more time for offloading, resulting in more frequent delay outages.
- Again, the goal effectiveness feasibility region is a surface, i.e., there are multiple solutions guaranteeing the goal-effectiveness constraint.
- While the above consideration holds, there exists a minimum goal cost solution, i.e., the minimum cost needed to achieve the target goal effectiveness. The latter is the lowest point of the contour plots representing the effectiveness thresholds and is represented by the black horizontal dashed lines in each plot.
- By increasing the goal value threshold (i.e., across different figures), the feasibility region shrinks as before and, as an additional observable effect, the minimum goal cost increases (e.g., above 60% of DO user data rate loss in Figure 7e). In other words, the stricter the constraint in terms of goal value is, the higher the minimum goal cost able to guarantee effectiveness is.
- In certain conditions (see Figure 7f), desired values of goal effectiveness are not attainable (e.g., goal effectiveness above 80%).
4. Problem Formulation and Solution
- The goal is achievable, i.e., problem (19) is feasible.
- The optimization is performed at the MEH, which is provided with the needed connect-compute instantaneous information, as specified here below.
- All effective channels (i.e., including the receive filters) are perfectly known instantaneously, while their statistics are unknown in advance.
- The computation delay at the current time slot is estimated and known with high confidence, i.e., we assume the computation delay is known at time t.
- The GO user has no buffered data, but it is able to accept all data patterns generated at time t, to be transmitted to the MEH.
- The DO user always has backlogged traffic, i.e., it continuously transmits and interferes with the GO system
- All thresholds (delay, entropy, effectiveness) are known in advance, i.e., they are requested as part of a service-level agreement.
4.1. Solution of the Instantaneous Problem
| Algorithm 1: Goal-oriented resource allocation |
At each time slot t:
|
5. Numerical Evaluation
- There exists a trade-off between goal effectiveness and goal value, with the latter being related to communication performance of a DO system coexisting with the GO system; our method is able to explore this trade-off, with close to optimal performance in different conditions, depending on the specific requirements (cf. Figure 8a).
- Fixing the PER (i.e., adapting communication to maintain an a priori target PER) while adapting the DO user transmit power does not provide much better performance than a strategy with both variables fixed across time (cf. Figure 9). Higher gains are achieved via a fully adaptive system.
- Our method is able to dramatically reduce the goal cost, while guaranteeing target goal effectiveness, by adaptively selecting target PER and DO user transmit power, based on measured application performance, even in the cases in which the fixed strategy fails to find a feasible solution (cf. Figure 9c).
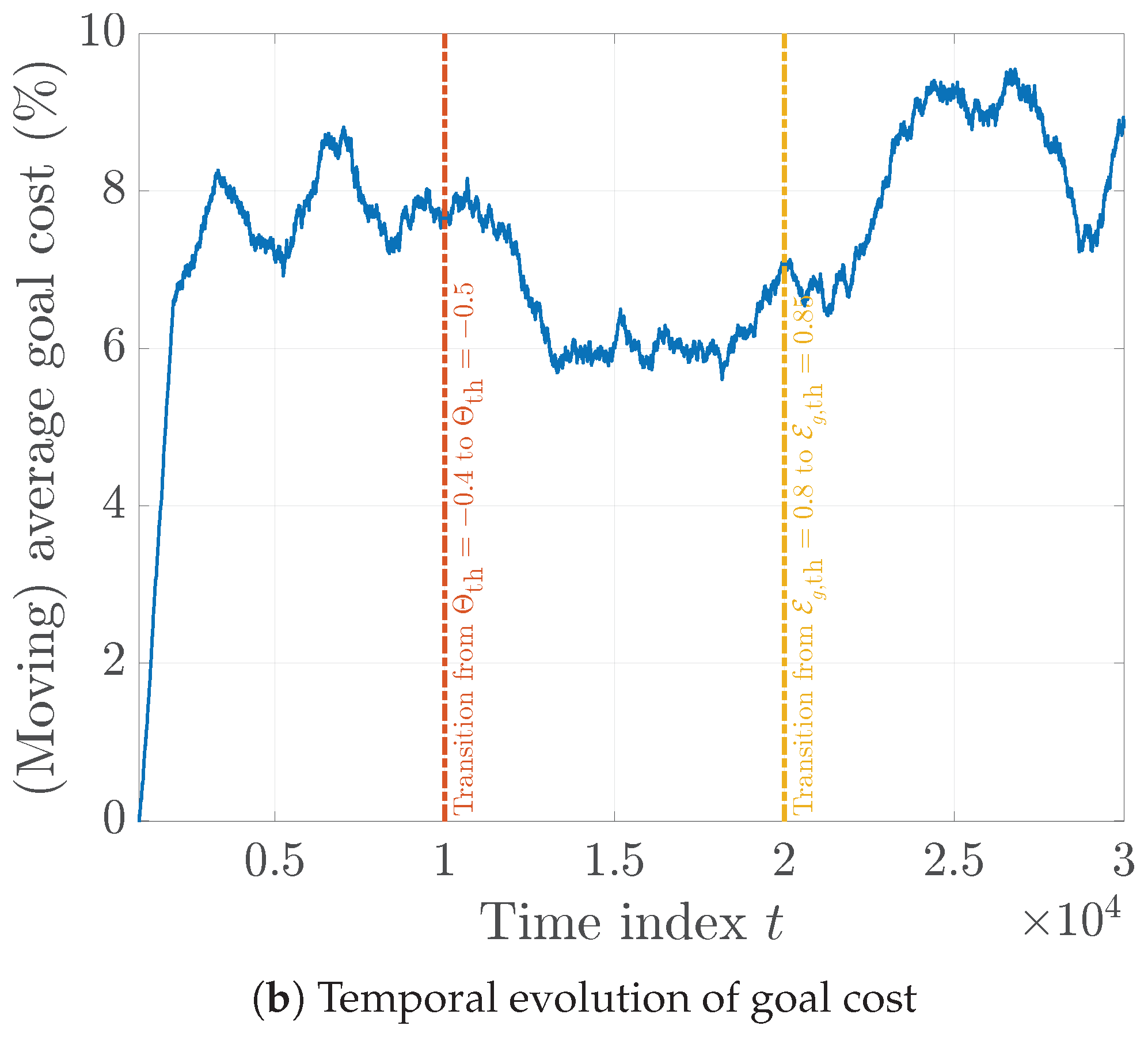
- Changing requirements over time (e.g., because of new application constraints) does not prevent our method from adaptively allocating resources to attain new levels of goal effectiveness and/or goal values (cf. Figure 10). Moreover, the method works in both directions: it increases the cost when a transition to stricter requirements occurs, while it reduces the cost whenever requirements are relaxed. The latter, thanks to properly defined state variables (i.e., virtual queues), is able to capture the behavior of the system in terms of constraint violations. Obviously, this capability is limited to the cases in which non-stationarity occurs on a longer time scale than the method’s adaptation.
- Computation resource availability at the GO system strongly affects the goal cost in terms of DO system data rate loss, a non-trivial result, never shown in the literature before, to the best of our knowledge. In addition, non-stationary environments, in terms of connect-compute resource availability, do not affect the adaptation capabilities of our method (cf. Figure 11).
- The proposed evaluations have been performed through system-level simulations and represent a first step towards a demonstration of a GO system optimization. The model-based analysis presented in this paper is useful to obtain insights on the potential gains that can be obtained in a real system. Obviously, a real-world demonstration would give rise to several new challenges, including the message passing between agents, translating to a coordination overhead that needs to be considered when designing an interface inter-connecting the systems. However, the obtained gains show the convenience of adopting such a GO approach for system optimization and lay the foundations for more practical works.
6. Conclusions and Future Directions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Uusitalo, M.A.; Rugel, P.; Boldi, M.R.; Strinati, E.C.; Demestichas, P.; Ericson, M.; Fettweis, G.P.; Filippou, M.C.; Gati, A.; Hamon, M.H.; et al. 6G Vision, Value, Use Cases and Technologies From European 6G Flagship Project Hexa-X. IEEE Access 2021, 9, 160004–160020. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems. IEEE Netw. 2020, 34, 134–142. [Google Scholar] [CrossRef]
- Hexa-X. Deliverable D1.2—Expanded 6G Vision, Use Cases and Societal Values—Including Aspects of Sustainability, Security and Spectrum; European Union: Luxembourg, 2021. [Google Scholar]
- Hexa-X. Deliverable D1.3—Targets and Requirements for 6G—Initial E2E Architecture; European Union: Luxembourg, 2022. [Google Scholar]
- Huo, Y.; Lin, X.; Di, B.; Zhang, H.; Hernando, F.J.L.; Tan, A.S.; Mumtaz, S.; Demir, Ö.T.; Chen-Hu, K. Technology Trends for Massive MIMO towards 6G. Sensors 2023, 23, 6062. [Google Scholar] [CrossRef] [PubMed]
- Hexa-X. Deliverable D4.2—AI-Driven Communication & Computation Co-Design: Initial Solutions; European Union: Luxembourg, 2022. [Google Scholar]
- Strinati, E.C.; Alexandropoulos, G.C.; Wymeersch, H.; Denis, B.; Sciancalepore, V.; D’Errico, R.; Clemente, A.; Phan-Huy, D.T.; De Carvalho, E.; Popovski, P. Reconfigurable, Intelligent, and Sustainable Wireless Environments for 6G Smart Connectivity. IEEE Commun. Mag. 2021, 59, 99–105. [Google Scholar] [CrossRef]
- Sur, S.N.; Singh, A.K.; Kandar, D.; Silva, A.; Nguyen, N.D. Intelligent Reflecting Surface Assisted Localization: Opportunities and Challenges. Electronics 2022, 11, 1411. [Google Scholar] [CrossRef]
- Ramezani, P.; Lyu, B.; Jamalipour, A. Toward RIS-Enhanced Integrated Terrestrial/Non-Terrestrial Connectivity in 6G. IEEE Netw. 2023, 37, 178–185. [Google Scholar] [CrossRef]
- Kekki, S.; Featherstone, W.; Fang, Y.; Kuure, P.; Li, A.; Ranjan, A.; Purkayastha, D.; Jiangping, F.; Frydman, D.; Verin, G.; et al. ETSI White Paper: MEC in 5G networks. In The European Telecommunications Standards Institute (ETSI); Tech. Rep. ETSI White Paper No. 28; ETSI: Sophia Antipolis, France, 2018. [Google Scholar]
- Letaief, K.B.; Shi, Y.; Lu, J.; Lu, J. Edge Artificial Intelligence for 6G: Vision, Enabling Technologies, and Applications. IEEE J. Sel. Areas Commun. 2022, 40, 5–36. [Google Scholar] [CrossRef]
- Yang, H.; Alphones, A.; Xiong, Z.; Niyato, D.; Zhao, J.; Wu, K. Artificial-Intelligence-Enabled Intelligent 6G Networks. IEEE Netw. 2020, 34, 272–280. [Google Scholar] [CrossRef]
- Zhang, S.; Zhu, D. Towards artificial intelligence enabled 6G: State of the art, challenges, and opportunities. Comput. Netw. 2020, 183, 107556. [Google Scholar] [CrossRef]
- Park, J.; Samarakoon, S.; Bennis, M.; Debbah, M. Wireless network intelligence at the edge. Proc. IEEE 2019, 107, 2204–2239. [Google Scholar] [CrossRef]
- Zhou, Z.; Chen, X.; Li, E.; Zeng, L.; Luo, K.; Zhang, J. Edge Intelligence: Paving the Last Mile of Artificial Intelligence With Edge Computing. Proc. IEEE 2019, 107, 1738–1762. [Google Scholar] [CrossRef]
- Calvanese Strinati, E.; Barbarossa, S. 6G networks: Beyond Shannon towards semantic and goal-oriented communications. Comput. Netw. 2021, 190, 107930. [Google Scholar] [CrossRef]
- Goldreich, O.; Juba, B.; Sudan, M. A Theory of Goal-Oriented Communication. J. ACM 2012, 59, 1–65. [Google Scholar] [CrossRef]
- Zou, H.; Zhang, C.; Lasaulce, S.; Saludjian, L.; Poor, V. Goal-Oriented Quantization: Analysis, Design, and Application to Resource Allocation. arXiv 2022, arXiv:2209.15347. [Google Scholar] [CrossRef]
- Binucci, F.; Banelli, P.; Di Lorenzo, P.; Barbarossa, S. Dynamic Resource Allocation for Multi-User Goal-oriented Communications at the Wireless Edge. In Proceedings of the 2022 30th European Signal Processing Conference (EUSIPCO), Belgrade, Serbia, 20 August–2 September 2022; pp. 697–701. [Google Scholar]
- Zhang, C.; Zou, H.; Lasaulce, S.; Saad, W.; Kountouris, M.; Bennis, M. Goal-Oriented Communications for the IoT and Application to Data Compression. arXiv 2022, arXiv:2211.05378. [Google Scholar] [CrossRef]
- Pezone, F.; Barbarossa, S.; Di Lorenzo, P. Goal-Oriented Communication for Edge Learning Based On the Information Bottleneck. In Proceedings of the ICASSP 2022—2022 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Singapore, 23–27 May 2022; pp. 8832–8836. [Google Scholar]
- Pappas, N.; Kountouris, M. Goal-Oriented Communication For Real-Time Tracking In Autonomous Systems. In Proceedings of the 2021 IEEE International Conference on Autonomous Systems (ICAS), Montreal, QC, Canada, 11–13 August 2021; pp. 1–5. [Google Scholar]
- Mostaani, A.; Simeone, O.; Chatzinotas, S.; Ottersten, B. Learning-based Physical Layer Communications for Multiagent Collaboration. In Proceedings of the 2019 IEEE 30th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Istanbul, Turkey, 8–1 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Merluzzi, M.; Martino, A.; Costanzo, F.; Di Lorenzo, P.; Barbarossa, S. Dynamic Ensemble Inference at the Edge. In Proceedings of the 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 7–11 December 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Merluzzi, M.; Battiloro, C.; Di Lorenzo, P.; Strinati, E.C. Energy-Efficient Classification at the Wireless Edge with Reliability Guarantees. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Republic of Korea, 16–20 May 2022; pp. 109–114. [Google Scholar] [CrossRef]
- Merluzzi, M.; Di Lorenzo, P.; Barbarossa, S. Wireless Edge Machine Learning: Resource Allocation and Trade-Offs. IEEE Access 2021, 9, 45377–45398. [Google Scholar] [CrossRef]
- Shao, J.; Zhang, J. BottleNet++: An End-to-End Approach for Feature Compression in Device-Edge Co-Inference Systems. In Proceedings of the 2020 IEEE International Conference on Communications Workshops (ICC Workshops), Dublin, Ireland, 1–7 June 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Xie, H.; Qin, Z.; Tao, X.; Letaief, K.B. Task-Oriented Multi-User Semantic Communications. IEEE J. Sel. Areas Commun. 2022, 40, 2584–2597. [Google Scholar] [CrossRef]
- Sana, M.; Strinati, E.C. Learning Semantics: An Opportunity for Effective 6G Communications. In Proceedings of the 2022 IEEE 19th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2022; pp. 631–636. [Google Scholar] [CrossRef]
- Lee, C.H.; Lin, J.W.; Chen, P.H.; Chang, Y.C. Deep Learning-Constructed Joint Transmission-Recognition for Internet of Things. IEEE Access 2019, 7, 76547–76561. [Google Scholar] [CrossRef]
- Merluzzi, M.; Filippou, M.C.; Baltar, L.G.; Strinati, E.C. Effective Goal-oriented 6G Communications: The Energy-aware Edge Inferencing Case. In Proceedings of the 2022 Joint European Conference on Networks and Communications & 6G Summit (EuCNC/6G Summit), Grenoble, France, 7–10 June 2022; pp. 457–462. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y. Exploiting Semantic Communication for Non-Orthogonal Multiple Access. arXiv 2022, arXiv:2209.06006. [Google Scholar] [CrossRef]
- Maman, M.; Calvanese-Strinati, E.; Dinh, L.N.; Haustein, T.; Keusgen, W.; Wittig, S.; Schmieder, M.; Barbarossa, S.; Merluzzi, M.; Costanzo, F.; et al. Beyond private 5G networks: Applications, architectures, operator models and technological enablers. EURASIP J. Wirel. Commun. Netw. 2021, 2021, 195. [Google Scholar] [CrossRef]
- Lee, H.; Ahn, H.; Park, Y.D. Performance analysis of coexistence of traditional communication system and emerging semantic communication system. ICT Express 2022, 9, 420–426. [Google Scholar] [CrossRef]
- Kountouris, M.; Pappas, N. Semantics-Empowered Communication for Networked Intelligent Systems. IEEE Commun. Mag. 2021, 59, 96–102. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y. Semi-NOMA enabled Coexisting Semantic and Bit Communications. In Proceedings of the 2022 International Symposium on Wireless Communication Systems (ISWCS), Hangzhou, China, 19–22 October 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Hollnagel, E. A Goals-Means Task Analysis Method. 1991. Available online: https://erikhollnagel.com/onewebmedia/GMTA.pdf (accessed on 20 July 2023).
- Popovski, P. Ultra-reliable communication in 5G wireless systems. In Proceedings of the 1st International Conference on 5G for Ubiquitous Connectivity, Levi, Finland, 26–27 November 2014; pp. 146–151. [Google Scholar] [CrossRef]
- Merluzzi, M.; Pietro, N.d.; Di Lorenzo, P.; Strinati, E.C.; Barbarossa, S. Discontinuous Computation Offloading for Energy-Efficient Mobile Edge Computing. IEEE Trans. Green Commun. Netw. 2022, 6, 1242–1257. [Google Scholar] [CrossRef]
- Battiloro, C.; Lorenzo, P.D.; Merluzzi, M.; Barbarossa, S. Lyapunov-based Optimization of Edge Resources for Energy-Efficient Adaptive Federated Learning. IEEE Trans. Green Commun. Netw. 2022, 7. [Google Scholar] [CrossRef]
- Sana, M.; De Domenico, A.; Yu, W.; Lostanlen, Y.; Calvanese Strinati, E. Multi-Agent Reinforcement Learning for Adaptive User Association in Dynamic mmWave Networks. IEEE Trans. Wirel. Commun. 2020, 19, 6520–6534. [Google Scholar] [CrossRef]
- Yu, H.; Neely, M.J. Dynamic Transmit Covariance Design in MIMO Fading Systems With Unknown Channel Distributions and Inaccurate Channel State Information. IEEE Trans. Wirel. Commun. 2017, 16, 3996–4008. [Google Scholar] [CrossRef]
- Mao, Y.; Zhang, J.; Letaief, K.B. Dynamic Computation Offloading for Mobile-Edge Computing With Energy Harvesting Devices. IEEE J. Sel. Areas Commun. 2016, 34, 3590–3605. [Google Scholar] [CrossRef]
- Mao, Y.; Zhang, J.; Song, S.H.; Letaief, K.B. Stochastic Joint Radio and Computational Resource Management for Multi-User Mobile-Edge Computing Systems. IEEE Trans. Wireless Commun. 2017, 16, 5994–6009. [Google Scholar] [CrossRef]
- Merluzzi, M.; Di Lorenzo, P.; Barbarossa, S.; Frascolla, V. Dynamic Computation Offloading in Multi-Access Edge Computing via Ultra-Reliable and Low-Latency Communications. IEEE Trans. Signal Inf. Process. Over Netw. 2020, 6. [Google Scholar] [CrossRef]
- Shlezinger, N.; Farhan, E.; Morgenstern, H.; Eldar, Y.C. Collaborative Inference via Ensembles on the Edge. In Proceedings of the ICASSP 2021—2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021; pp. 8478–8482. [Google Scholar] [CrossRef]
- Mitola, J.; Maguire, G.Q. Cognitive radio: Making software radios more personal. IEEE Pers. Commun. 1999, 6, 13–18. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive radio: Brain-empowered wireless communications. IEEE J. Sel. Areas Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Luo, J.; Zhao, S.; Yang, Z.; Huang, G.; Tang, D. Data-Driven-Based Relay Selection and Cooperative Beamforming for Non-Regenerative Multi-Antenna Relay Networks. IEEE Access 2021, 9, 167154–167161. [Google Scholar] [CrossRef]
- Ibrahem, L.N.; Al-Mistarihi, M.F.; Khodeir, M.A.; Alhulayil, M.; Darabkh, K.A. Best Relay Selection Strategy in Cooperative Spectrum Sharing Framework with Mobile-Based End User. Appl. Sci. 2023, 13, 8127. [Google Scholar] [CrossRef]
- Polyanskiy, Y.; Poor, H.V.; Verdu, S. Channel Coding Rate in the Finite Blocklength Regime. IEEE Trans. Inf. Theory 2010, 56, 2307–2359. [Google Scholar] [CrossRef]
- Sun, C.; She, C.; Yang, C.; Quek, T.Q.S.; Li, Y.; Vucetic, B. Optimizing Resource Allocation in the Short Blocklength Regime for Ultra-Reliable and Low-Latency Communications. IEEE Trans. Wirel. Commun. 2019, 18, 402–415. [Google Scholar] [CrossRef]
- She, C.; Yang, C.; Quek, T.Q.S. Radio Resource Management for Ultra-Reliable and Low-Latency Communications. IEEE Commun. Mag. 2017, 55, 72–78. [Google Scholar] [CrossRef]
- Canziani, A.; Paszke, E.C. An Analysis of Deep Neural Network Models for Practical Applications. arXiv 2016, arXiv:1605.07678. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Saerens, M.; Latinne, P.; Decaestecker, C. Any reasonable cost function can be used for a posteriori probability approximation. IEEE Trans. Neural Netw. 2002, 13, 1204–1210. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Hinton, G. Learning Multiple Layers of Features from Tiny Images; Technical Report 0; University of Toronto: Toronto, ON, Canada, 2009. [Google Scholar]
- Neely, M.J. Stochastic Network Optimization with Application to Communication and Queueing Systems; Morgan & Claypool Publishers: San Rafael, CA, USA, 2010. [Google Scholar]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- European Union Directive 2014/53/EU OF THE European Parliament and of the Council of 16 April 2014 on the Harmonisation of the Laws of the Member States Relating to the Making Available on the Market of Radio Equipment and Repealing Directive 1999/5/EC. 2014. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32014L0053 (accessed on 20 July 2023).
- Regulation (EU) 2019/881 of the European Parliament and of the Council of 17 April 2019 on ENISA (the European Union Agency for Cybersecurity) and on Information and Communications Technology Cybersecurity Certification and Repealing Regulation (EU) No 526/2013 (Cybersecurity Act). 2019. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32019R0881 (accessed on 20 July 2023).
- Proposal for a Regulation OF THE European Parliament and of the Council on Horizontal Cybersecurity Requirements for Products with Digital Elements and Amending Regulation (EU) 2019/1020. 2022. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex%3A52022PC0454 (accessed on 20 July 2023).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AI | Artificial Intelligence | GPU | Graphical Processing Unit |
| AP | Access Point | KPI | Key Performance Indicator |
| CLD | Conditional Lyapunov Drift | KVI | Key Value Indicator |
| CNN | Convolutional Neural Network | MEC | Mutli-access Edge Computing |
| CPU | Central Processing Unit | MEH | Mobile Edge Host |
| DNN | Deep Neural Network | MCS | Modulation and Coding Scheme |
| DO | Data-Oriented | ML | Machine Learning |
| DPP | Drift Plus Penalty | NREI | Negative Relative average Entropy Increase |
| DRL | Deep Reinforcement Learning | NOMA | Non-Orthogonal Multiple Access |
| E2E | End-to-End | PER | Packet Error Rate |
| eMBB | enhanced Mobile Broad Band | SINR | Signal-to-Interference-plus-Noise Ratio |
| GO | Goal-Oriented | UE | User Equipment |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Merluzzi, M.; Filippou, M.C.; Gomes Baltar, L.; Mueck, M.D.; Calvanese Strinati, E. 6G Goal-Oriented Communications: How to Coexist with Legacy Systems? Telecom 2024, 5, 65-97. https://doi.org/10.3390/telecom5010005
Merluzzi M, Filippou MC, Gomes Baltar L, Mueck MD, Calvanese Strinati E. 6G Goal-Oriented Communications: How to Coexist with Legacy Systems? Telecom. 2024; 5(1):65-97. https://doi.org/10.3390/telecom5010005
Chicago/Turabian StyleMerluzzi, Mattia, Miltiadis C. Filippou, Leonardo Gomes Baltar, Markus Dominik Mueck, and Emilio Calvanese Strinati. 2024. "6G Goal-Oriented Communications: How to Coexist with Legacy Systems?" Telecom 5, no. 1: 65-97. https://doi.org/10.3390/telecom5010005
APA StyleMerluzzi, M., Filippou, M. C., Gomes Baltar, L., Mueck, M. D., & Calvanese Strinati, E. (2024). 6G Goal-Oriented Communications: How to Coexist with Legacy Systems? Telecom, 5(1), 65-97. https://doi.org/10.3390/telecom5010005