
Combined Light and Data Driving Stages without Capacitors for Energy Transformation

 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
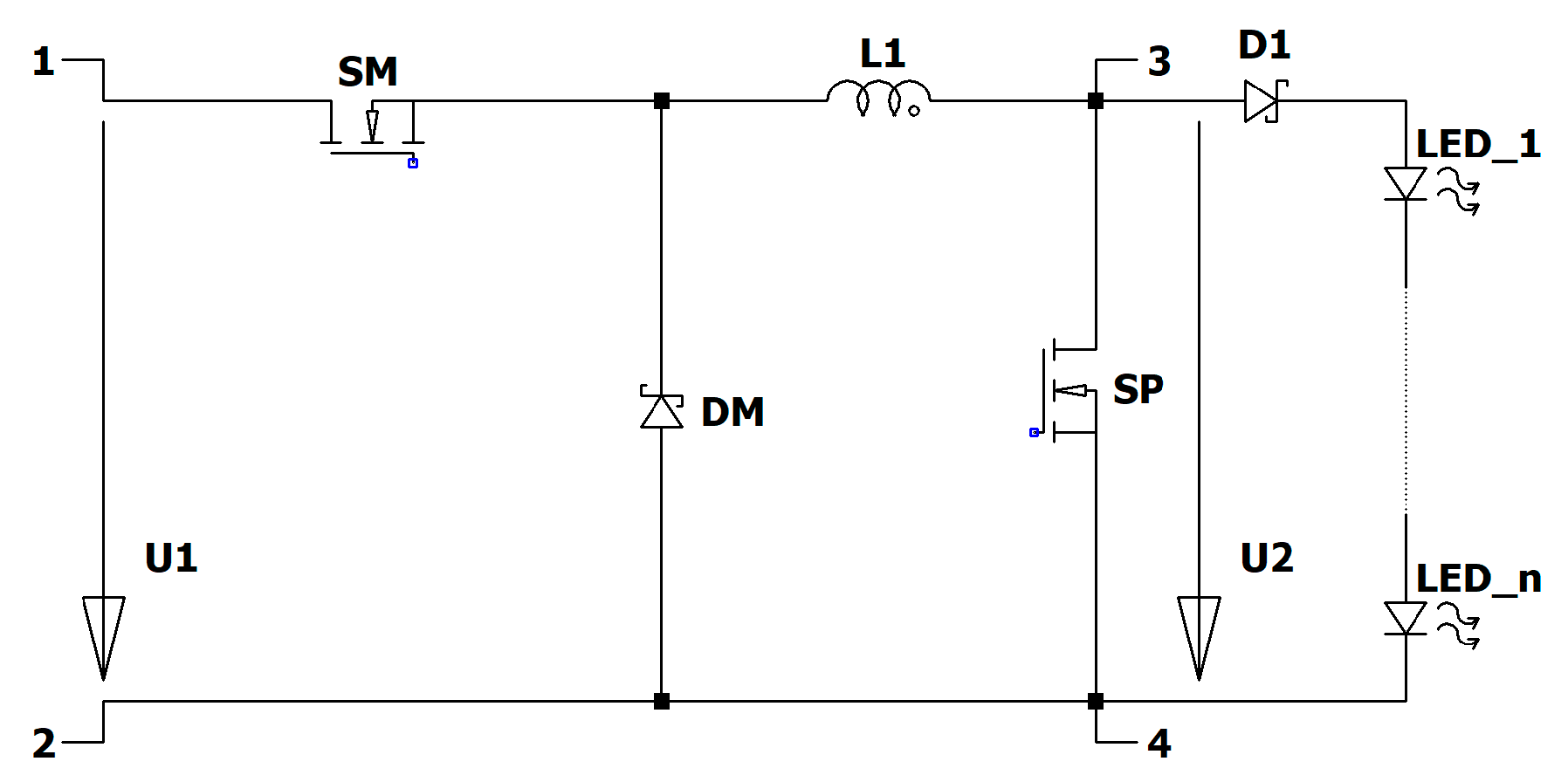
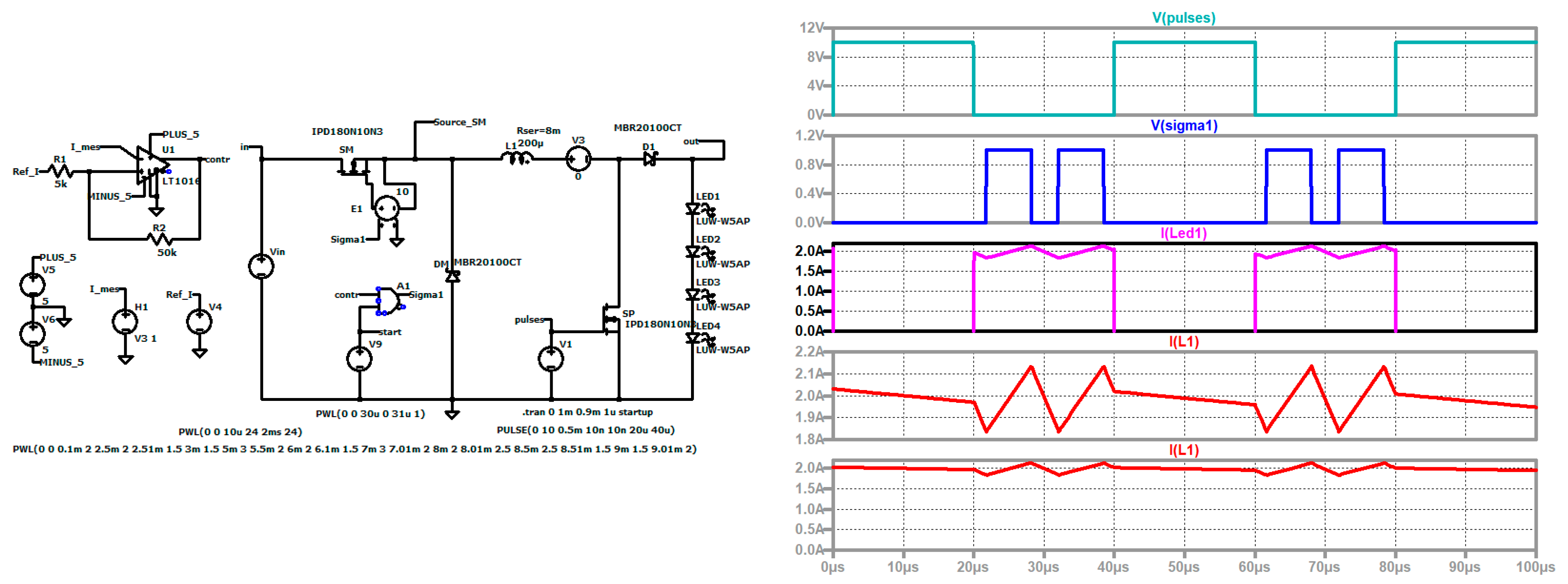
2. Driving Stage I
2.1. Pulsing of More Channels in Series
2.2. Variation in the Arrangement of the Inductor L1, the Main Switch SM, and the Diode DM
2.3. Influence of the Parasitic Load Inductance
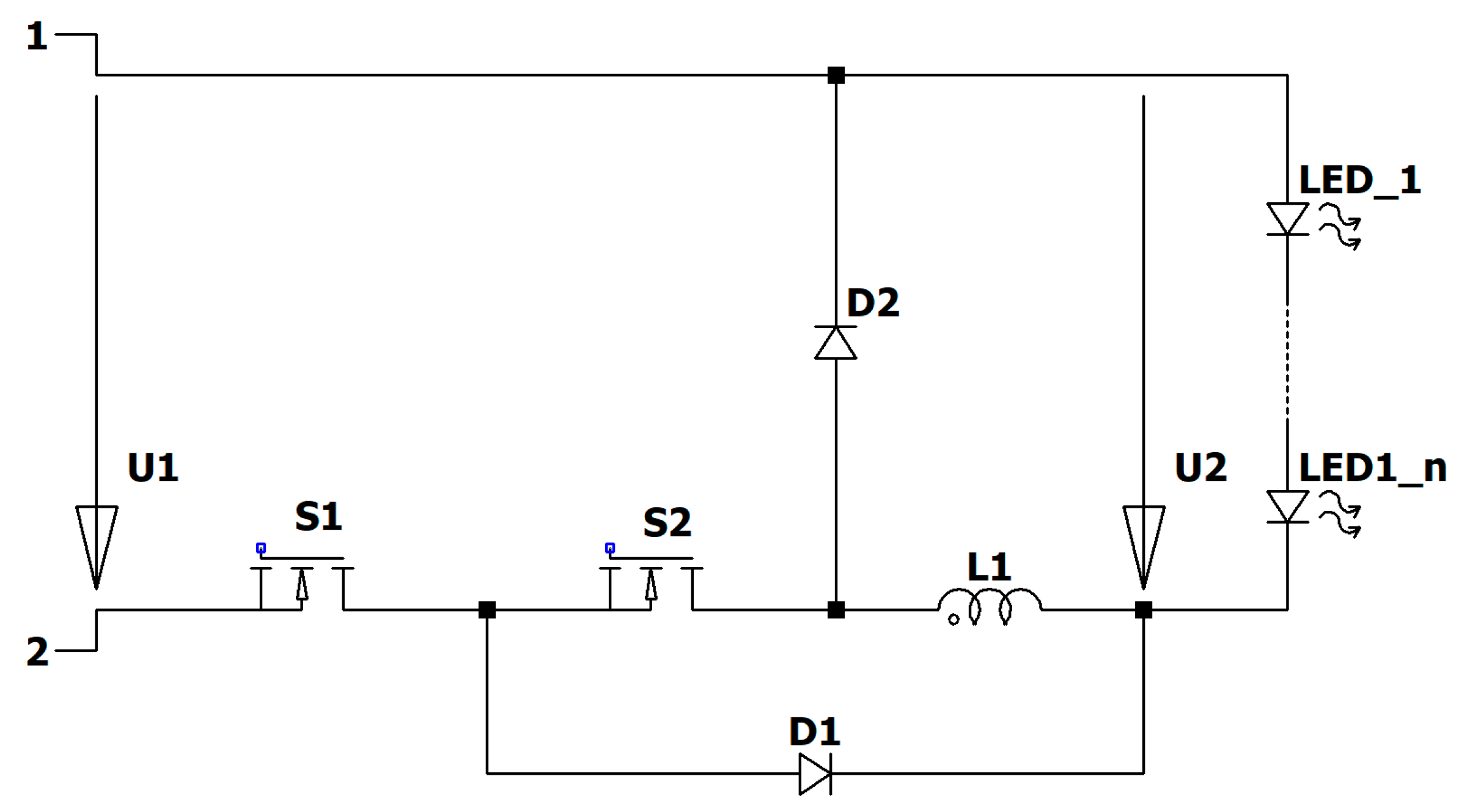
3. Driving Stage II (Pulsed LED Driver with Half-Bridge)
Influence of the Parasitic Output Inductance
4. Driving Stage Type III
4.1. Hysteresis Controller
4.2. Influence of the Parasitic Inductance at the Load Side
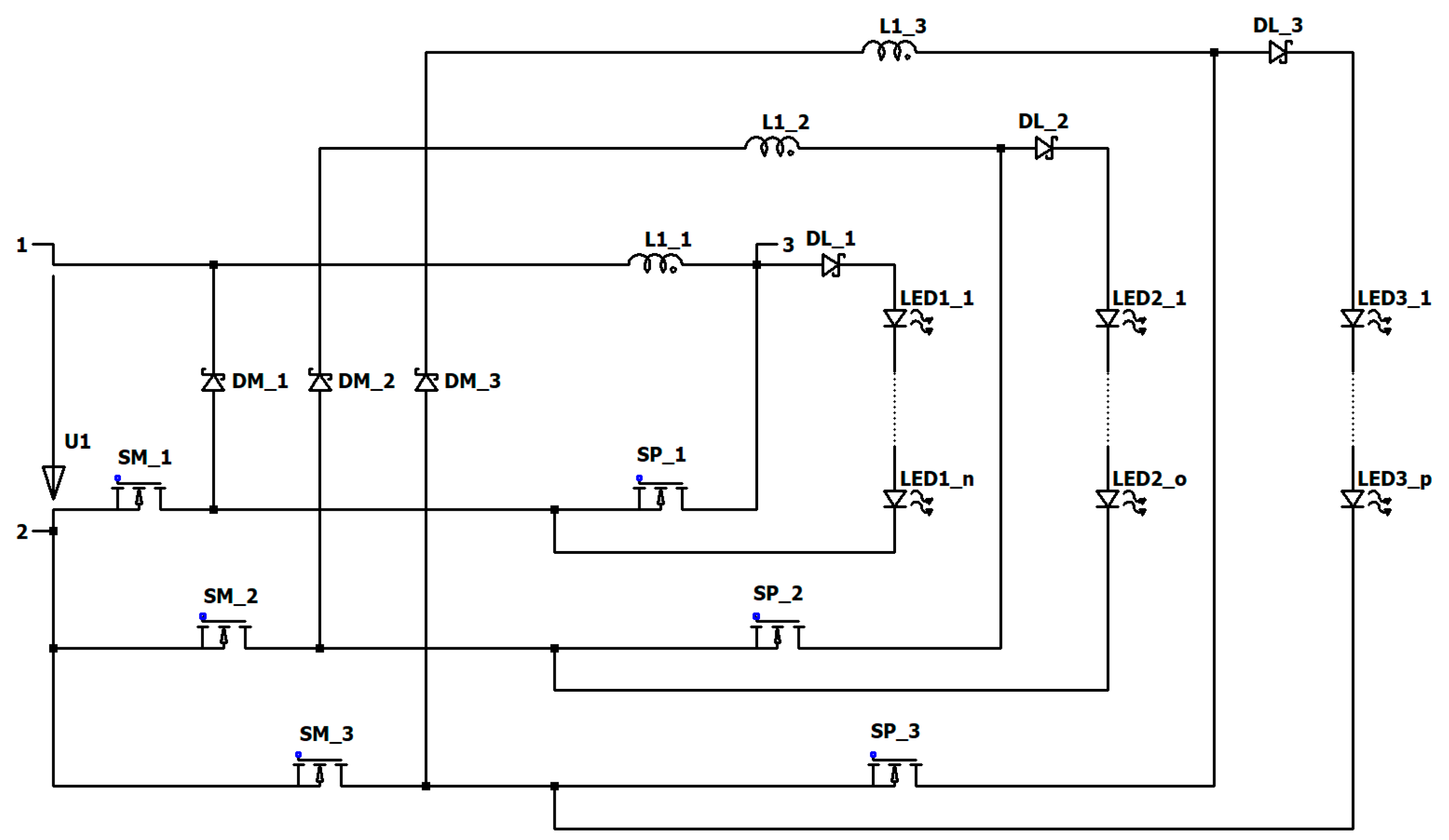
5. Combination of Three Converters
6. Further Aspects
6.1. Influence of the Parasitic Input Inductance
6.2. Dimming
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Céspedes, M.M.; Guzmán, B.G.; Jiménez, V.P.G.; Armada, A.G. Aligning the Light for Vehicular Visible Light Communications: High Data Rate and Low-Latency Vehicular Visible Light Communications Implementing Blind Interference Alignment. IEEE Veh. Technol. Mag. 2023, 18, 59–69. [Google Scholar] [CrossRef]
- Younus, S.H.; Al-Hameed, A.A.; Hussein, A.T.; Alresheedi, M.T.; Elmirghani, J.M.H. Parallel Data Transmission in Indoor Visible Light Communication Systems. IEEE Access 2019, 7, 1126–1138. [Google Scholar] [CrossRef]
- You, X.; Chen, J.; Zheng, H.; Yu, C. Efficient Data Transmission Using MPPM Dimming Control in Indoor Visible Light Communication. IEEE Photonics J. 2015, 7, 7902512. [Google Scholar] [CrossRef]
- Xie, E.; Chen, C.; Ouyang, C.; Hill, J.; McKendry, J.J.; Zhang, Y.; Gu, E.; Herrnsdorf, J.; Haas, H.; Dawson, M.D. GaN-Based Series Hybrid LED Array: A Dual-Function Light Source With Illumination and High-Speed Visible Light Communication Capabilities. J. Light Technol. 2024, 42, 243–250. [Google Scholar] [CrossRef]
- Ntogari, G.; Kamalakis, T.; Walewski, J.; Sphicopoulos, T. Combining Illumination Dimming Based on Pulse-Width Modulation with Visible-Light Communications Based on Discrete Multitone. J. Opt. Commun. Netw. 2011, 3, 56–65. [Google Scholar] [CrossRef]
- Xiao, H.; Xiao, X.; Wang, K.; Wang, R.; Xie, B.; Chiang, K.S. Optimization of Illumination Performance of Trichromatic White Light-Emitting Diode and Characterization of Its Modulation Bandwidth for Communication Applications. IEEE Photonics J. 2018, 10, 8201511. [Google Scholar] [CrossRef]
- Chun, H.; Chiang, C.-J.; Monkman, A.; O’Brien, D. A Study of Illumination and Communication using Organic Light Emitting Diodes. J. Light Technol. 2013, 31, 3511–3517. [Google Scholar] [CrossRef]
- Edelmoser, K.H.; Himmelstoss, F.A. High Dynamic Current Source for LED Light and Data Transmission Applications. In Proceedings of the International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, Nuremberg, Germany, 28–30 June 2016; pp. 1–8, PCIM Europe 2016. [Google Scholar]
- Morales-Céspedes, M. Interference Management in Visible Light Communications based on Reconfigurable Photodetectors for Industrial IoT. In Proceedings of the 2023 IEEE International Workshop on Metrology for Industry 4.0 & IoT (MetroInd4.0 & IoT), Brescia, Italy, 6–8 June 2023; pp. 376–381. [Google Scholar] [CrossRef]
- Heinig, S.; Jacobs, K.; Norrga, S.; Nee, H.-P. Single-Fiber Combined Optical Power and Data Transmission for High-Voltage Applications. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 1473–1480. [Google Scholar] [CrossRef]
- Pawlikowski, W.; Barmaki, A.; Narimani, M.; Hranilovic, S. Light-Emitting Commutating Diodes for Optical Wireless Communications within LED Drivers. IEEE Photonics J. 2020, 12, 7905111. [Google Scholar] [CrossRef]
- Soundari, D.V.; Varshini, G.; Vijayalakshmi, G. Development of V2V Communication using Light Fidelity. In Proceedings of the 2022 3rd International Conference on Electronics and Sustainable Communication Systems (ICESC), Coimbatore, India, 17–19 August 2022; pp. 565–568. [Google Scholar] [CrossRef]
- Sangmahamad, P.; Pirajnanchai, V.; Junon, S. Experimental Validation and Performance Analysis for Simultaneous Illumination and Communication System of Indoor Commercial white-LED Lamps. In Proceedings of the 2021 13th International Conference on Information Technology and Electrical Engineering (ICITEE), Chiang Mai, Thailand, 14–15 October 2021; pp. 30–33. [Google Scholar] [CrossRef]
- Wang, C.; Zou, P.; Chen, J.; Li, G.; Chi, N. Internet of Vehicle System Based on Automotive Headlight utilizing Probabilistic Shaping. In Proceedings of the 2019 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Deng, P.; Kavehrad, M. Real-time software-defined single-carrier QAM mimo visible light communication system. In Proceedings of the 2016 Integrated Communications Navigation and Surveillance (ICNS), Herndon, VA, USA, 19–21 April 2016; pp. 5A3-1–5A3-11. [Google Scholar] [CrossRef]
- Chen, Y.; Chang, C.; Yang, P. A novel constant current control circuit for a primary-side controlled AC-DC LED driver. In Proceedings of the 2014 11th International Conference on Electronics, Computer and Computation (ICECCO), Abuja, Nigeria, 29 September–1 October 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Shan, Z.; Chen, X.; Fan, S.; Yuan, G.; Tse, C.K. Resonant Switched-capacitor Auxiliary Circuit for Active Power Decoupling in Electrolytic Capacitor-less AC/DC LED Drivers. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 866–871. [Google Scholar] [CrossRef]
- Yu, J.; Zhou, J. A Multi-Channel Low-Power LED Driver Circuit for PPG. In Proceedings of the 2023 IEEE 17th International Conference on Anti-counterfeiting, Security, and Identification (ASID), Xiamen, China, 1–3 December 2023; pp. 12–15. [Google Scholar] [CrossRef]
- Pham-Nguyen, L.; Nguyen, V.-Q.; Nguyen, D.-M.; Han, H.-D.; Nguyen, K.-H.; Le, H.-P. A 14-W 94%-Efficient Hybrid DC-DC Converter with Advanced Bootstrap Gate Drivers for Smart Home LED Applications. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 4744–4749. [Google Scholar] [CrossRef]
- Pallapati, R.B.; Chinthamalla, R.; Reddy, S.S.; Mishra, S.; Bommu, H.V. Reduced Power Processing Constant Output Current High Efficient Electrolytic Capacitor-less Single Phase LED Driver. In Proceedings of the 2023 IEEE 3rd International Conference on Smart Technologies for Power, Energy and Control (STPEC), Bhubaneswar, India, 10–13 December 2023; pp. 1–6. [Google Scholar] [CrossRef]
















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Windisch, M.; Himmelstoss, F.A.; Leba, M.; Stoicuta, O.; Votzi, H.L. Combined Light and Data Driving Stages without Capacitors for Energy Transformation. Electricity 2024, 5, 313-333. https://doi.org/10.3390/electricity5020016
Windisch M, Himmelstoss FA, Leba M, Stoicuta O, Votzi HL. Combined Light and Data Driving Stages without Capacitors for Energy Transformation. Electricity. 2024; 5(2):313-333. https://doi.org/10.3390/electricity5020016
Chicago/Turabian StyleWindisch, Michael, Felix A. Himmelstoss, Monica Leba, Olimpiu Stoicuta, and Helmut L. Votzi. 2024. "Combined Light and Data Driving Stages without Capacitors for Energy Transformation" Electricity 5, no. 2: 313-333. https://doi.org/10.3390/electricity5020016
APA StyleWindisch, M., Himmelstoss, F. A., Leba, M., Stoicuta, O., & Votzi, H. L. (2024). Combined Light and Data Driving Stages without Capacitors for Energy Transformation. Electricity, 5(2), 313-333. https://doi.org/10.3390/electricity5020016