
Real Driving Emissions—Event Detection for Efficient Emission Calibration

Abstract
:1. Introduction
State-of-the-Art—Real Driving Emissions Calibration and Evaluation
2. Materials and Methods
2.1. Requirements and Data Pre-Processing
2.2. Event Detection Using Moving Window Analysis
- Peaks can be identified on a time basis by directly comparing the measured value with a threshold value or by determining the deviation from an (moving) average value.
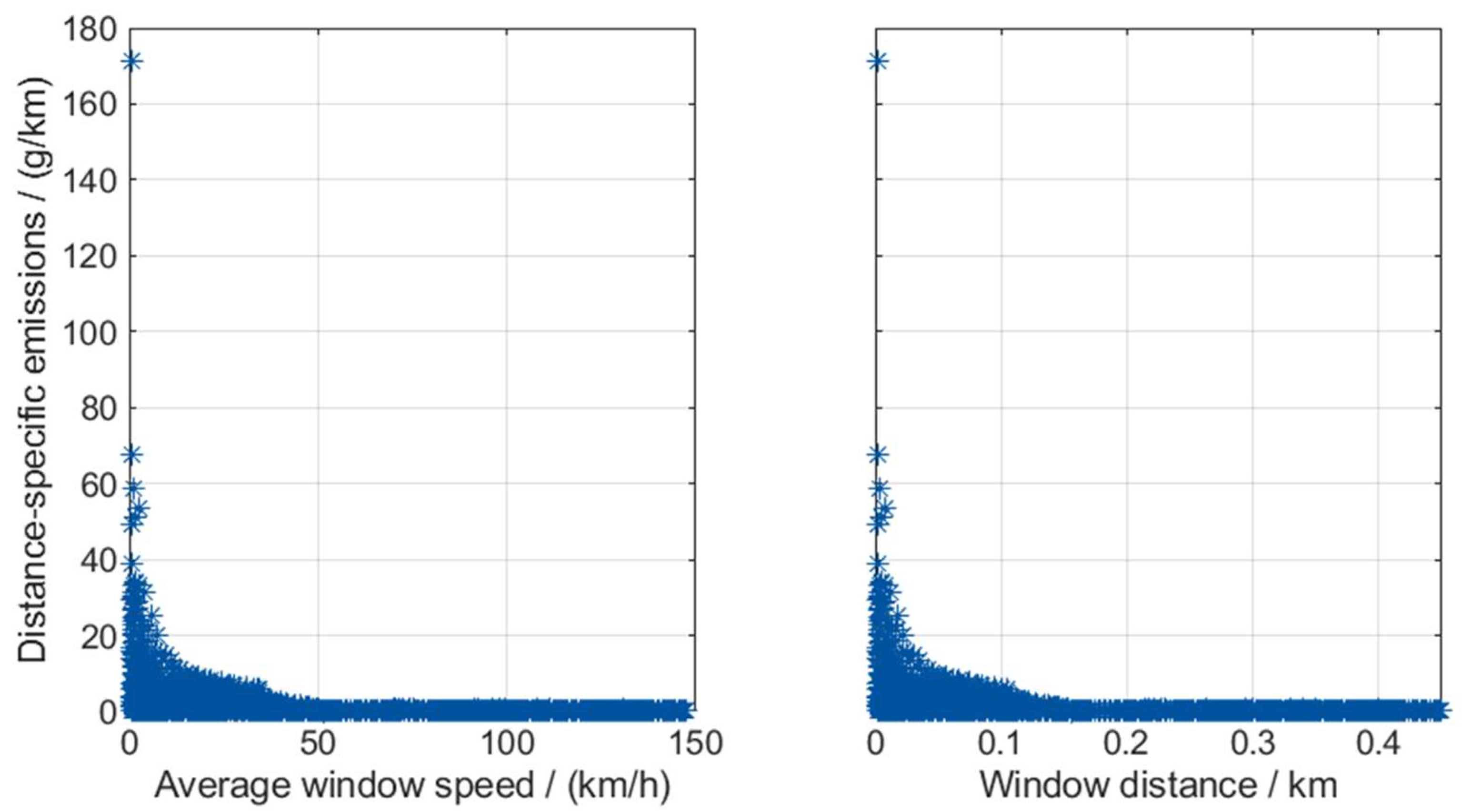
- Phases of increased emissions can be identified by their distance-specific course.
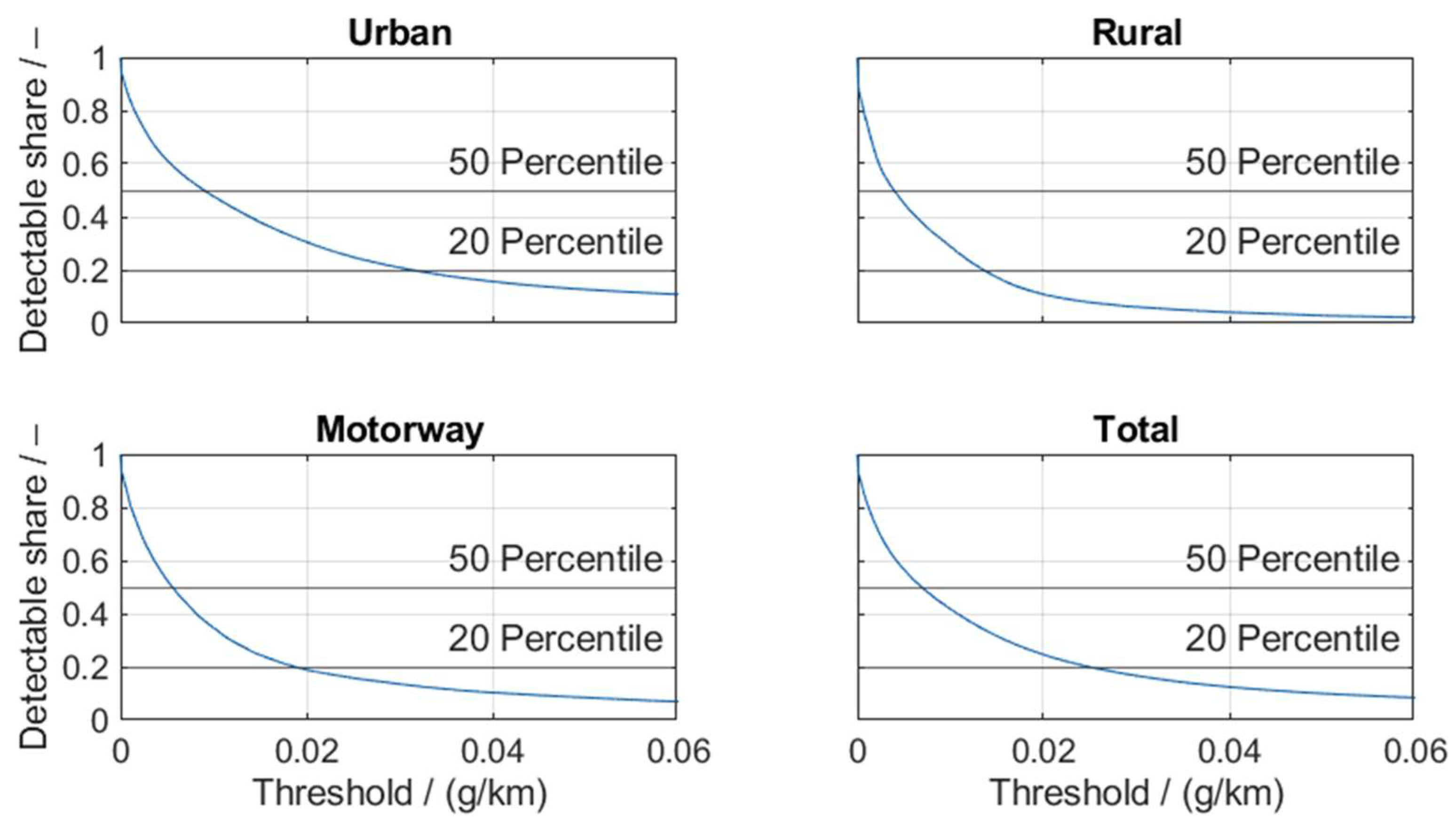
2.3. Detection Threshold
2.4. Test Parameters and Data
- The basic setup of the event detection is implemented.
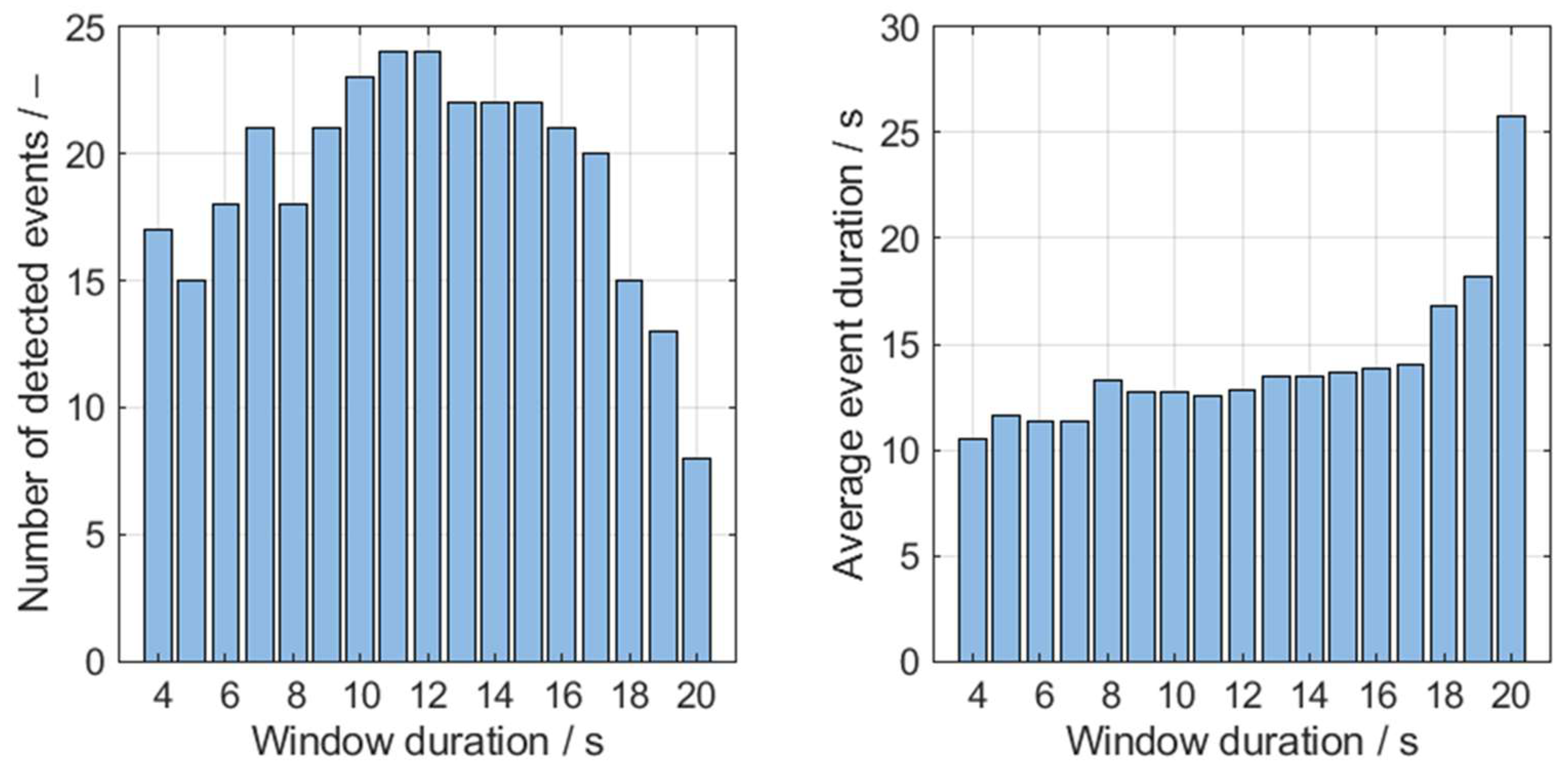
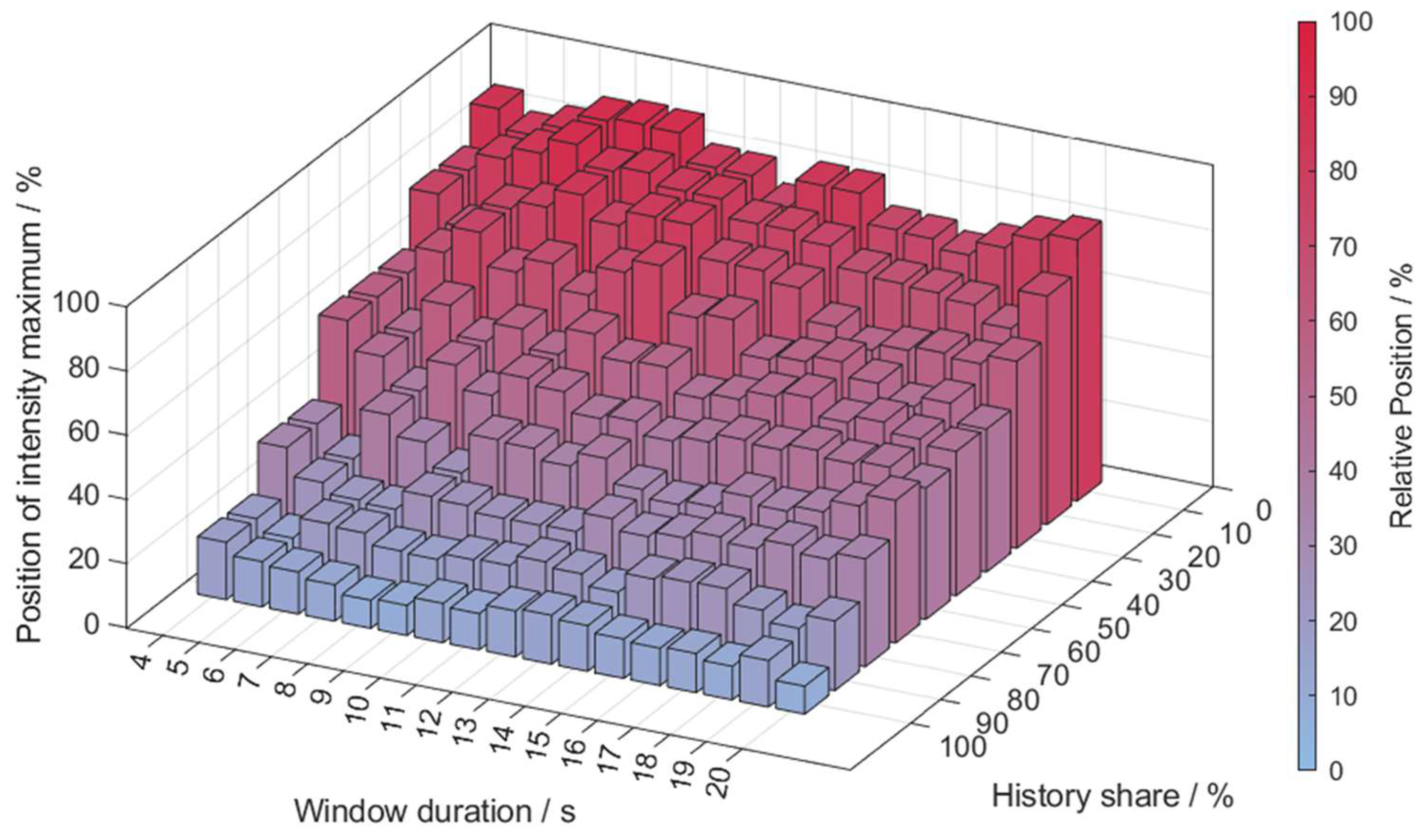
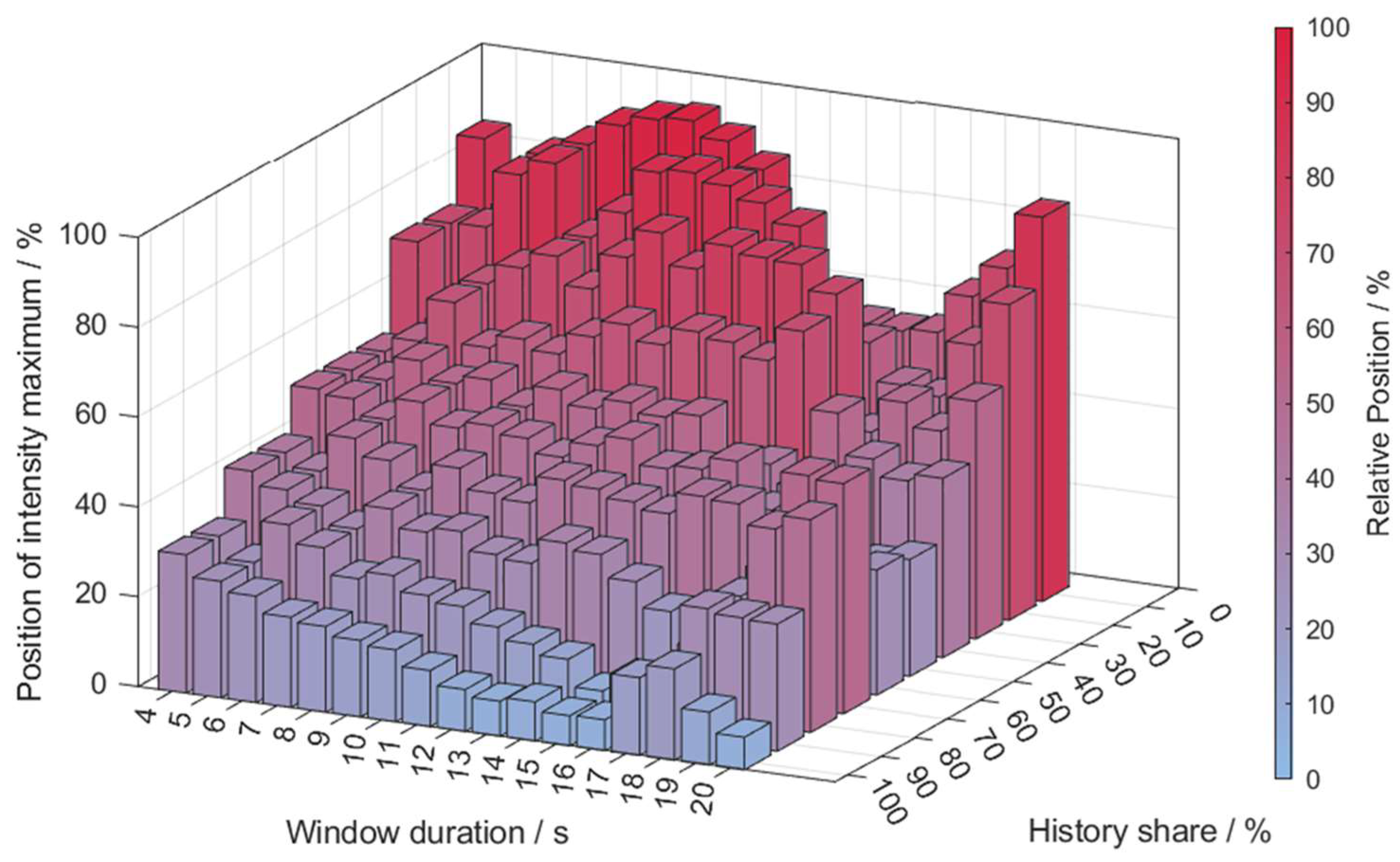
- The duration of the windows is varied to analyze the impact of the timespan that can be considered for each sample.
- The layout of the windows around each sample is modified to investigate the influence of different distributions of history and future shares.
3. Results
4. Discussion
5. Conclusions
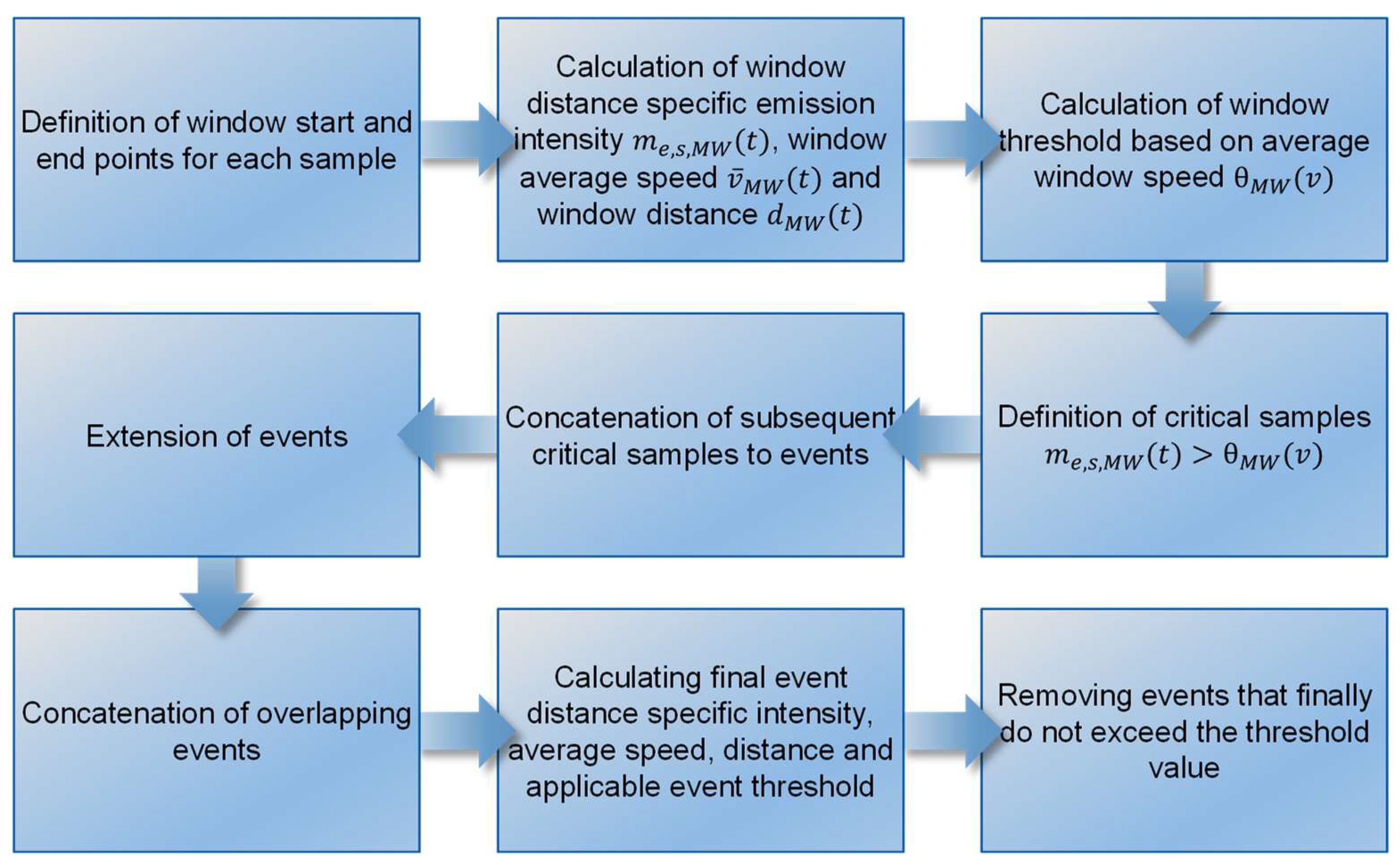
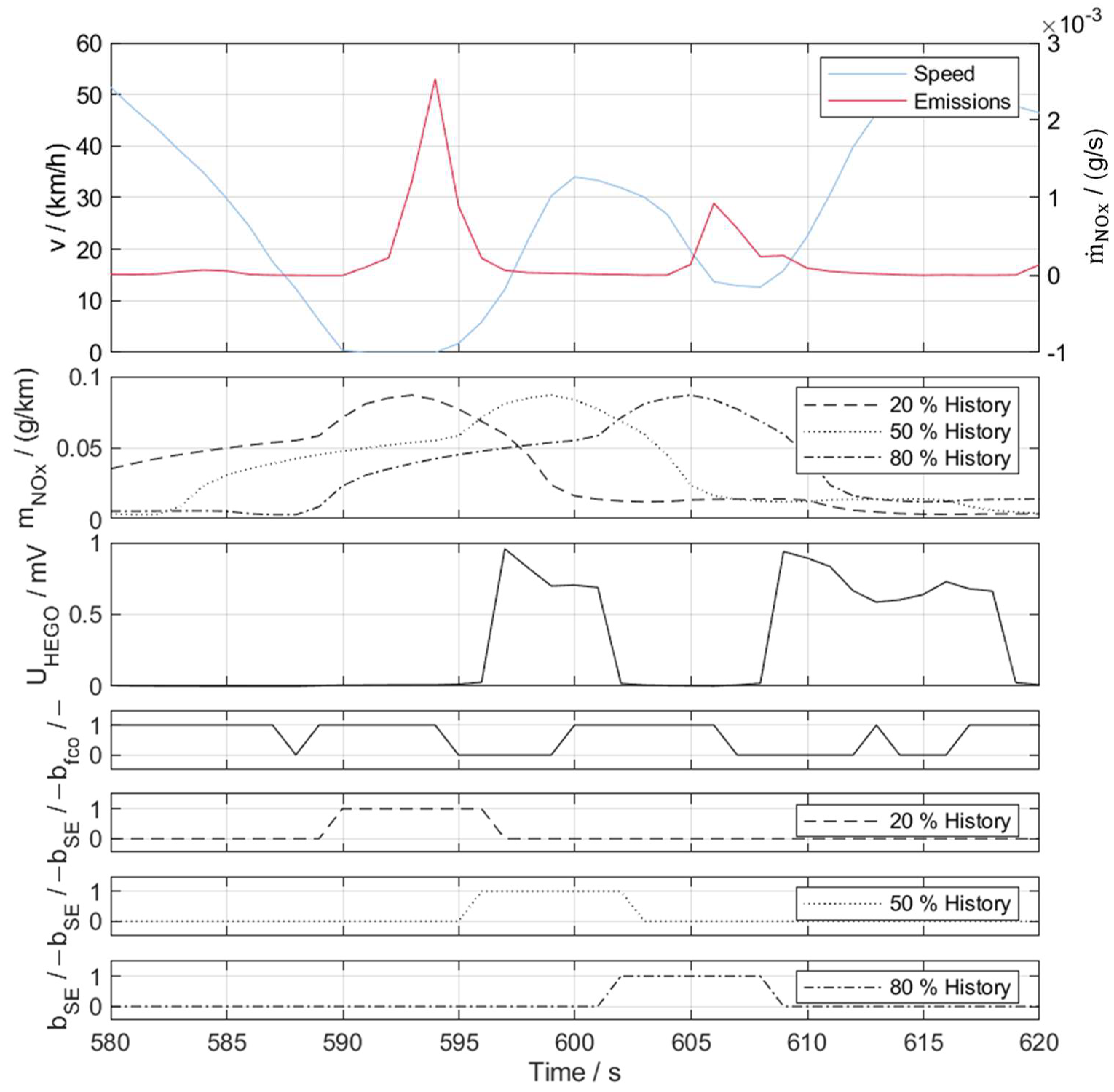
- Definition of analysis windows for each measurement sample with focus into the future development of the signal traces.
- Integration of emission intensity and driven distance within these windows for calculation of distance-specific emission intensity for each sample.
- Threshold identification for critical intensity based on the average speed within the analysis windows for each sample.
- Comparison of the distance-specific intensity to the threshold for each sample and marking of critical samples.
- Summarizing consecutive critical samples to an event.
- Extension of beginning of event into past in case of critical initial situation (e.g., fuel cut-off).
- Re-check of final event duration for critical intensity.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- European Commission. The European Green Deal: Communication from the Commission to the European Parliament, the European Council, the Council, the European Economic and Social Committee and the Committee of the Regions; 640 Final; Official Journal of the European Union: Brussels, Belgium, 2019.
- Mulholland, E.; Miller, J.; Braun, C.; Jin, L.; Rodriguez, F. Quantifying the Long-Term Air Quality and Health Benefits from Euro 7/VII Standards in Europe. Available online: https://euagenda.eu/upload/publications/eu-euro7-standards-health-benefits-jun21.pdf (accessed on 3 January 2024).
- Mulholland, E.; Miller, J.; Bernard, Y.; Lee, K.; Rodríguez, F. The role of NOx emission reductions in Euro 7/VII vehicle emission standards to reduce adverse health impacts in the EU27 through 2050. Transp. Eng. 2022, 9, 100133. [Google Scholar] [CrossRef]
- European Parliament and Council. Commission Regulation (EU) 2018/1832; Official Journal of the European Union: Brussels, Belgium, 2018. [Google Scholar]
- European Commission. Commission Regulation (EU) 2017/1151; Official Journal of the European Union: Brussels, Belgium, 2017.
- European Commission. Proposal for a Regulation of the European Parliament and of the Council on Type-Approval of Motor Vehicles and Engines and of Systems, Components and Separate Technical Units Intended for Such Vehicles, with Respect to Their Emissions and Battery Durability (Euro 7) and Repealing Regulations (EC) No 715/2007 and (EC) No 595/2009; Official Journal of the European Union: Brussels, Belgium, 2022; Volume 0365.
- Boger, T.; Rose, D.; He, S.; Joshi, A. Developments for future EU7 regulations and the path to zero impact emissions—A catalyst substrate and filter supplier’s perspective. Transp. Eng. 2022, 10, 100129. [Google Scholar] [CrossRef]
- Giechaskiel, B.; Bonnel, P.; Perujo, A.; Dilara, P. Solid Particle Number (SPN) Portable Emissions Measurement Systems (PEMS) in the European Legislation: A Review. Int. J. Environ. Res. Public Health 2019, 16, 4819. [Google Scholar] [CrossRef] [PubMed]
- Giechaskiel, B.; Clairotte, M.; Valverde, V.; Bonnel, P. Real Driving Emissions: 2017 Assessment of PEMS Measurement Uncertainty; Publications Office of the European Union: Luxembourg, 2017. [Google Scholar] [CrossRef]
- Giechaskiel, B.; Lähde, T.; Gandi, S.; Keller, S.; Kreutziger, P.; Mamakos, A. Assessment of 10-nm Particle Number (PN) Portable Emissions Measurement Systems (PEMS) for Future Regulations. Int. J. Environ. Res. Public Health 2020, 17, 3878. [Google Scholar] [CrossRef] [PubMed]
- Giechaskiel, B.; Casadei, S.; Mazzini, M.; Sammarco, M.; Montabone, G.; Tonelli, R.; Deana, M.; Costi, G.; Di Tanno, F.; Prati, M.; et al. Inter-Laboratory Correlation Exercise with Portable Emissions Measurement Systems (PEMS) on Chassis Dynamometers. Appl. Sci. 2018, 8, 2275. [Google Scholar] [CrossRef]
- Varella, R.; Giechaskiel, B.; Sousa, L.; Duarte, G. Comparison of Portable Emissions Measurement Systems (PEMS) with Laboratory Grade Equipment. Appl. Sci. 2018, 8, 1633. [Google Scholar] [CrossRef]
- Czerwinski, J.; Zimmerli, Y.; Hüssy, A.; Engelmann, D.; Bonsack, P.; Remmele, E.; Huber, G. Testing and evaluating real driving emissions with PEMS. Combust. Engines 2018, 174, 17–25. [Google Scholar] [CrossRef]
- Gerstenberg, J.; Hartlief, H.; Tafel, S. Introducing a Method to Evaluate RDE Demands at the Engine Test Bench; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2016. [Google Scholar] [CrossRef]
- Gerstenberg, J.; Hartlief, H.; Tafel, S. RDE-Entwicklungsumgebung am hochdynamischen Motorprüfstand. ATZextra 2015, 20, 36–41. [Google Scholar] [CrossRef]
- Nies, H.; Beidl, C.; Hüners, H.; Fischer, K. Systematische Entwicklungsmethodik für Eine Robuste Motorkalibrierung unter RDE-Randbedingungen; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2020; pp. 50–62. [Google Scholar] [CrossRef]
- Maschmeyer, H. Systematische Bewertung Verbrennungsmotorischer Antriebssysteme Hinsichtlich Ihrer Realfahrtemissionen am Motorenprüfstand. Ph.D. Thesis, TU Darmstadt, Darmstadt, Deutschland, 2017. [Google Scholar]
- Maschmeyer, H.; Beidl, C.; Düser, T.; Schick, B. RDE-Homologation—Herausforderungen, Lösungen und Chancen. MTZ Motortech Z 2016, 77, 84–91. [Google Scholar] [CrossRef]
- Mayr, C.; Merl, R.; Gigerl, H.-P.; Teitzer, M.; König, D.; Stemmer, D.; Retter, F. Test emissionsrelevanter Fahrzyklen auf dem Motorprüfstand. In Simulation und Test 2018; Liebl, J., Ed.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2019; ISBN 978-3-658-25293-9. [Google Scholar]
- Faubel, L.; Lensch-Franzen, C.; Schuhardt, A.; Krohn, C. Übertrag von RDE-Anforderungen in eine modellbasierte Prüfstandsumgebung. MTZ Extra 2016, 21, 44–49. [Google Scholar] [CrossRef]
- Wasserburger, A.; Hametner, C. Automated Generation of Real Driving Emissions Compliant Drive Cycles Using Conditional Probability Modeling. In Proceedings of the 2020 IEEE Vehicle Power and Propulsion Conference (VPPC), Gijon, Spain, 18 November–16 December 2020; pp. 1–8, ISBN 978-1-7281-8959-8. [Google Scholar]
- Wasserburger, A.; Hametner, C.; Didcock, N. Risk-averse real driving emissions optimization considering stochastic influences. Eng. Optim. 2020, 52, 122–138. [Google Scholar] [CrossRef]
- Wasserburger, A.; Didcock, N.; Hametner, C. Efficient real driving emissions calibration of automotive powertrains under operating uncertainties. Eng. Optim. 2021, 55, 140–157. [Google Scholar] [CrossRef]
- Donateo, T.; Giovinazzi, M. Building a cycle for Real Driving Emissions. Energy Procedia 2017, 126, 891–898. [Google Scholar] [CrossRef]
- Dai, Z.; Niemeier, D.; Eisinger, D. Driving Cycles: A New Cycle-Bulding Method that Better Represents Real-World Emissions; University of California, Davis: Davis, CA, USA, 2008. [Google Scholar]
- Kondaru, M.K.; Telikepalli, K.P.; Thimmalapura, S.V.; Pandey, N.K. Generating a Real World Drive Cycle–A Statistical Approach; SAE Technical Paper Series; WCX World Congress Experience; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2018. [Google Scholar]
- Kooijman, D.G.; Balau, A.E.; Wilkins, S.; Ligterink, N.; Cuelenaere, R. WLTP Random Cycle Generator. In Proceedings of the 2015 IEEE Vehicle Power and Propulsion Conference (VPPC), Montreal, QC, Canada, 19–22 October 2015; pp. 1–6, ISBN 978-1-4673-7637-2. [Google Scholar]
- Wu, Y.; Liu, G. Research on construction of vehicle driving cycle based on Markov chain and global K-means clustering algorithm. Veh. Dyn. 2020, 4, 1–9. [Google Scholar] [CrossRef]
- Della Ragione, L.; Meccariello, G. Statistical approach to identify Naples city’s real driving cycle referring to the Worldwide harmonized Light duty Test Cycle (WLTC) framework. Sustain. Dev. Plan. VIII 2017, 210, 555–566. [Google Scholar] [CrossRef]
- Balau, A.E.; Kooijman, D.; Vazquez Rodarte, I.; Ligterink, N. Stochastic Real-World Drive Cycle Generation Based on a Two Stage Markov Chain Approach. SAE Int. J. Mater. Manf. 2015, 8, 390–397. [Google Scholar] [CrossRef]
- Roberts, P.; Mason, A.; Whelan, S.; Tabata, K.; Kondo, Y.; Kumagai, T.; Mumby, R.; Bates, L. RDE Plus—A Road to Rig Development Methodology for Whole Vehicle RDE Compliance: Overview; SAE Technical Paper Series; WCX SAE World Congress Experience; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2020. [Google Scholar]
- Mason, A.; Roberts, P.; Whelan, S.; Kondo, Y.; Brenton, L. RDE Plus—A Road to Rig Development Methodology for Complete RDE Compliance: Road to Chassis Perspective; SAE Technical Paper Series; WCX SAE World Congress Experience; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2020. [Google Scholar]
- Roberts, P.J.; Mumby, R.; Mason, A.; Redford-Knight, L.; Kaur, P. RDE Plus—The Development of a Road, Rig and Engine-in-the-Loop Test Methodology for Real Driving Emissions Compliance; SAE Technical Paper Series; WCX SAE World Congress Experience; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2019. [Google Scholar]
- Andert, J.; Xia, F.; Klein, S.; Guse, D.; Savelsberg, R.; Tharmakulasingam, R.; Thewes, M.; Scharf, J. Road-to-rig-to-desktop: Virtual development using real-time engine modelling and powertrain co-simulation. Int. J. Engine Res. 2019, 20, 686–695. [Google Scholar] [CrossRef]
- Wenig, M.; Artukovic, D.; Armbruster, C. vRDE—Virtual Real Driving Emission. In VPC—Simulation und Test 2016; Liebl, J., Beidl, C., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2017; ISBN 978-3-658-16753-0. [Google Scholar]
- Riccio, A.; Monzani, F.; Landi, M. Towards a Powerful Hardware-in-the-Loop System for Virtual Calibration of an Off-Road Diesel Engine. Energies 2022, 15, 646. [Google Scholar] [CrossRef]
- Kuznik, A.; Steinhaus, T.; Stumpp, M.; Beidl, C. Optimierung des Emissionsverhaltens innerhalb der hybriden Betriebsstrategie am Prüfstand mittels Co-Simulation. In Liebl (Hg.) 2021—Experten-Forum Powertrain; Springer: Berlin/Heidelberg, Germany, 2021; pp. 31–45. [Google Scholar] [CrossRef]
- Donn, C.; Zulehner, W.; Pfister, F. Realfahrtests für die Antriebsentwicklung mithilfe des virtuellen Fahrversuchs. ATZ Extra 2019, 24, 44–49. [Google Scholar] [CrossRef]
- Alilovic, M.; Corona, F.; Nica, M. Generierung eines fahrdynamikoptimierten Real-Driving-Emissions-Zyklus aus bestehenden Fahrdaten. ATZ Elektron 2022, 17, 50–54. [Google Scholar] [CrossRef]
- Ashtari, A.; Bibeau, E.; Shahidinejad, S. Using Large Driving Record Samples and a Stochastic Approach for Real-World Driving Cycle Construction: Winnipeg Driving Cycle. Transp. Sci. 2014, 48, 170–183. [Google Scholar] [CrossRef]
- Galgamuwa, U.; Perera, L.; Bandara, S. A Representative Driving Cycle for the Southern Expressway Compared to Existing Driving Cycles. Transp. Dev. Econ. 2016, 2, 589. [Google Scholar] [CrossRef]
- Knopov, P.S.; Samosonok, A.S. On Markov stochastic processes with local interaction for solving some applied problems. Cybern. Syst. Anal. 2011, 47, 346–359. [Google Scholar] [CrossRef]
- Claßen, J.; Pischinger, S.; Krysmon, S.; Sterlepper, S.; Dorscheidt, F.; Doucet, M.; Reuber, C.; Görgen, M.; Scharf, J.; Nijs, M.; et al. Statistically supported real driving emission calibration: Using cycle generation to provide vehicle-specific and statistically representative test scenarios for Euro 7. Int. J. Engine Res. 2020, 21, 1783–1799. [Google Scholar] [CrossRef]
- Claßen, J. Entwicklung Statistisch Relevanter Prüfszenarien zur Bewertung der Fahrzeug-Emissionsrobustheit unter realen Fahrbedingungen. Ph.D. Thesis, Universitätsbibliothek der RWTH Aachen, Aachen, Germany, 2022. [Google Scholar] [CrossRef]
- Krysmon, S.; Dorscheidt, F.; Claßen, J.; Düzgün, M.; Pischinger, S. Real Driving Emissions—Conception of a Data-Driven Calibration Methodology for Hybrid Powertrains Combining Statistical Analysis and Virtual Calibration Platforms. Energies 2021, 14, 4747. [Google Scholar] [CrossRef]
- Basseville, M.; Nikiforov, I. Detection of Abrupt Change Theory and Application; Prentice Hall: Englewood Cliffs, NJ, USA, 1993; ISBN 0-13-126780-9. [Google Scholar]
- Gupta, M.; Gao, J.; Aggarwal, C.C.; Han, J. Outlier Detection for Temporal Data: A Survey. IEEE Trans. Knowl. Data Eng. 2014, 26, 2250–2267. [Google Scholar] [CrossRef]
- Yamanishi, K.; Takeuchi, J.I. A unifying framework for detecting outliers and change points from non-stationary time series data. In Proceedings of the KDD02: The Eighth ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Edmonton, AB, Canada, 23–26 July 2002; pp. 676–681. [Google Scholar] [CrossRef]
- Keogh, E.; Lin, J.; Fu, A. HOT SAX: Efficiently Finding the Most Unusual Time Series Subsequence. In Proceedings of the Fifth IEEE International Conference on Data Mining (ICDM’05), Houston, TX, USA, 27–30 November 2005; pp. 226–233, ISBN 0-7695-2278-5. [Google Scholar]
- Yeh, C.-C.M.; Zhu, Y.; Ulanova, L.; Begum, N.; Ding, Y.; Dau, H.A.; Silva, D.F.; Mueen, A.; Keogh, E. Matrix Profile I: All Pairs Similarity Joins for Time Series: A Unifying View That Includes Motifs, Discords and Shapelets. In Proceedings of the 2016 IEEE 16th International Conference on Data Mining (ICDM), Barcelona, Spain, 12–15 December 2016; pp. 1317–1322. [Google Scholar] [CrossRef]
- Zhu, Y.; Zimmerman, Z.; Senobari, N.S.; Yeh, C.-C.M.; Funning, G.; Mueen, A.; Brisk, P.; Keogh, E. Matrix Profile II: Exploiting a Novel Algorithm and GPUs to Break the One Hundred Million Barrier for Time Series Motifs and Joins. In Proceedings of the 2016 IEEE 16th International Conference on Data Mining (ICDM), Barcelona, Spain, 12–15 December 2016; pp. 739–748, ISBN 978-1-5090-5473-2. [Google Scholar]
- Zardini, A.; Bonnel, P. Real Driving Emissions Regulation. In European Methodology to Fine Tune the EU Real Driving Emissions Data Evaluation Method; Publications Office of the European Union: Luxembourg, 2020. [Google Scholar] [CrossRef]
- European Union. UN Regulation No 168—Uniform Provisions Concerning the Approval of Light Duty Passenger and Commercial Vehicles with Regards to Real Driving Emissions (RDE) [2024/211]: UN Regulation No 168; Official Journal of the European Union: Brussels, Belgium, 2024.
- Krysmon, S.; Pischinger, S.; Claßen, J.; Trendafilov, G.; Düzgün, M.; Dorscheidt, F.; Nijs, M.; Görgen, M. Applying Density-Based Clustering for the Analysis of Emission Events in Real Driving Emissions Calibration. Future Transp. 2024, 4, 46–66. [Google Scholar] [CrossRef]
- Krysmon, S.; Claßen, J.; Düzgün, M.; Pischinger, S. Data of paper “Real Driving Emissions—Event Detection for Efficient Emission Calibration” [Data set]; Zenodo, 2024. [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Criteria | |||
|---|---|---|---|
| / | |||
| /[] |
| Criteria | Value | Criteria | Value |
|---|---|---|---|
| Vehicle mass | Drivetrain | All-wheel drive (AWD) | |
| Engine | Inline 4 cylinder | Gearbox | Automatic Transmission (AT) |
| Max. power | EATS | Three-way catalytic converter (TWC) and Gasoline particulate filter (GPF) | |
| Max. torque | Fuel | Gasoline |
| Type | |||
|---|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krysmon, S.; Claßen, J.; Düzgün, M.; Pischinger, S. Real Driving Emissions—Event Detection for Efficient Emission Calibration. Gases 2024, 4, 174-190. https://doi.org/10.3390/gases4030010
Krysmon S, Claßen J, Düzgün M, Pischinger S. Real Driving Emissions—Event Detection for Efficient Emission Calibration. Gases. 2024; 4(3):174-190. https://doi.org/10.3390/gases4030010
Chicago/Turabian StyleKrysmon, Sascha, Johannes Claßen, Marc Düzgün, and Stefan Pischinger. 2024. "Real Driving Emissions—Event Detection for Efficient Emission Calibration" Gases 4, no. 3: 174-190. https://doi.org/10.3390/gases4030010