
The Needed Features of Connected and Automated Vehicles to Prevent Passenger Car Crashes Caused by Driving Errors


Abstract
:1. Introduction
- What are the key characteristics of the fatal passenger car crashes in which a driving error was the immediate risk factor?
- What kind of operational capabilities should the CAVs have, and what actions should they take to avoid the crashes caused by driving errors?
2. CAVs’ Safety Impact
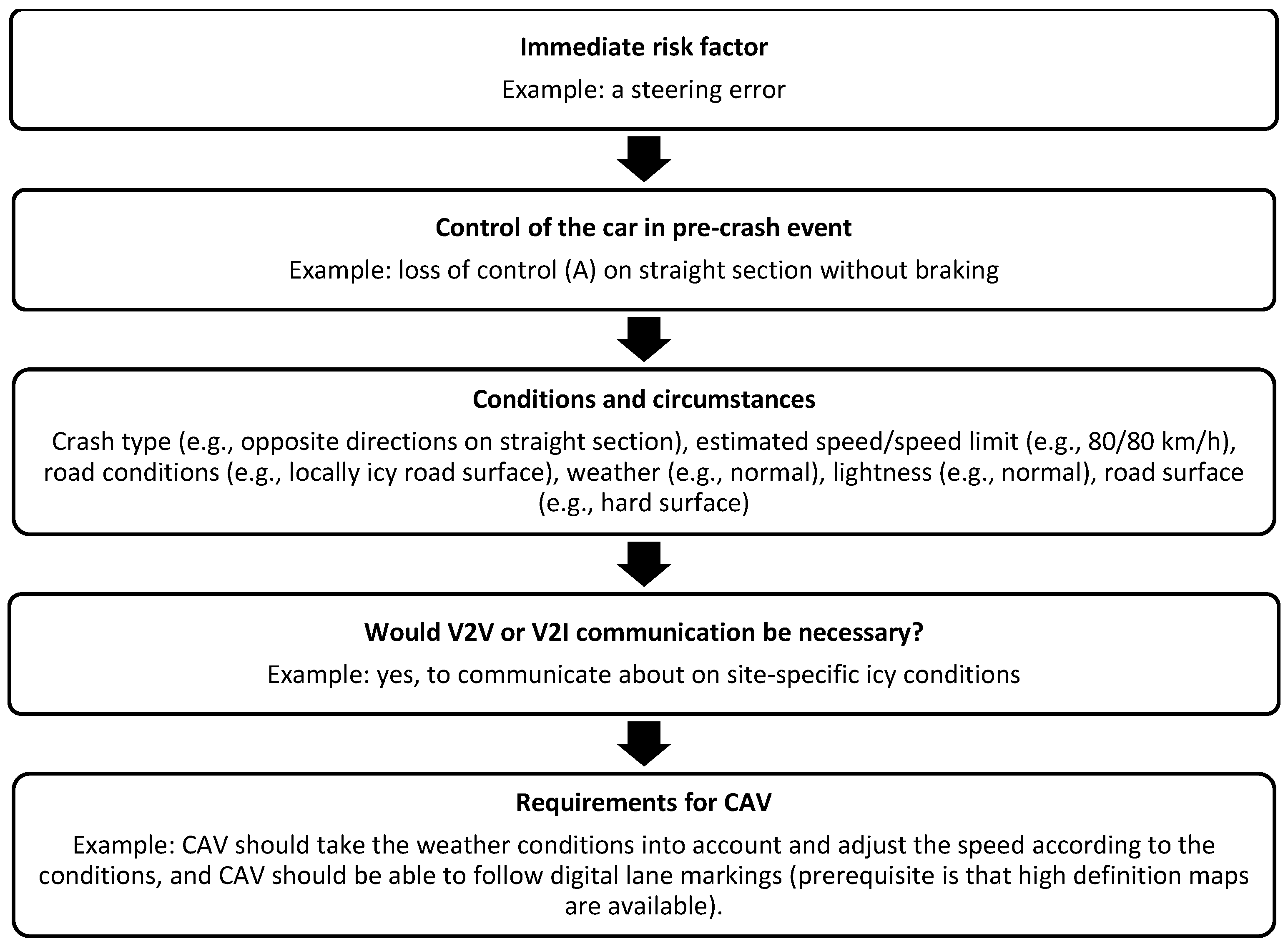
3. Materials and Methods
- CAV operates without steering or judgment errors.
- CAV manages to keep the car on the right lane.
- CAV takes the weather conditions into account and adjusts the speed (to a safe speed) according to the weather conditions in each road section.
- CAV overtakes only when overtaking can be conducted safely.
- CAV is always 100% operational.
- At intersections, CAV recognises the approaching car and assesses the right and safe moment to go straight or turn.
- CAV operates without observation errors for the other cars’ movements.
- CAV manages to follow digital lane markings (the availability of high definition maps as a prerequisite).
4. Results
4.1. Head-on Crashes
4.2. Single-Car Crashes
4.3. Intersection and Rear-End Crashes
5. Discussion
- Loss of control of the car in an adverse weather condition is a typical pre-crash event, and hence, speed should be adjusted according to the road and weather conditions. In adverse conditions, the safe speed is likely lower than the speed limit.
- Crashes in which the car was under control or the car was not steered were typically due to a driver’s incorrect observation or wrong driving path. In order to prevent these types of crashes, errors related to observations of other road users and traffic environments should be avoided. This is a challenging requirement, because fatal crashes occur in diverse traffic environments, including, for example, the lower road network, in which some roads are gravel-paved.
- Communication technologies (e.g., V2V and V2I) are necessary in recognising possible conflicts and hazardous situations; e.g., at intersections and sudden changes in road conditions.
- CAVs should be developed to follow digital lane markings or other digital data on the location of the roadway, because the painted lane markings are an uncertain way to assist the vehicle in keeping its supposed lane position.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics and Variables | n = 48 | % = 100% |
|---|---|---|
| Crash types | ||
| -Opposite directions (no turning) | 20 | 42% |
| -Opposite directions (turning) | 2 | 5% |
| -Single-car crashes: | 17 | 35% |
| -Intersecting directions (no turning) | 3 | 6% |
| -Intersecting directions (turning) | 3 | 6% |
| -Same directions (no turning) | 2 | 4% |
| -Other | 1 | 2% |
| Action of the driver to prevent the crash | ||
| No action | 18 | 38% |
| The driver tried to control the vehicle | 12 | 25% |
| The driver decelerated | 2 | 4% |
| Action was not possible to identify | 16 | 33% |
| Road conditions | ||
| -Dry weather | 18 | 38% |
| -Icy road surface | 12 | 25% |
| -Snowy road surface | 10 | 21% |
| -Wet road surface | 8 | 17% |
| Weather | ||
| -Cloudy | 19 | 40% |
| -Sunny | 12 | 25% |
| -Rain | 6 | 13% |
| -Snowfall | 4 | 8% |
| -Sleet | 4 | 8% |
| -Fog | 1 | 2% |
| -Other/not available | 2 | 4% |
| Lightness | ||
| -Daylight | 27 | 56% |
| -Dim | 8 | 17% |
| -Dark | 13 | 27% |
| Time of day | ||
| -0:00–5:59 | 2 | 4% |
| -6:00–11:59 | 14 | 29% |
| -12:00–17:59 | 24 | 50% |
| -18:00–23:59 | 8 | 17% |
| At-fault car’s speed | ||
| -30 km/h or less | 8 | 17% |
| -31–50 km/h | 3 | 6% |
| -51–70 km/h | 6 | 13% |
| -71–90 km/h | 20 | 42% |
| -91–110 km/h | 5 | 10% |
| -Not available | 6 | 13% |
| Road surface | ||
| -Hard road surface | 42 | 88% |
| -Tarmac | 1 | 2% |
| -Gravel paved road | 5 | 10% |
Appendix B

References
- Belokurov, V.; Spodarev, R.; Belokurov, S. Determining passenger traffic as important factor in urban public transport system. Transp. Res. Procedia 2020, 50, 52–58. [Google Scholar] [CrossRef]
- Pöllänen, M.; Liljamo, T.; Kallionpää, E.; Liimatainen, H. Is There Progress towards Environmental Sustainability among Road Haulage Companies. Sustainability 2021, 13, 5845. [Google Scholar] [CrossRef]
- Enoch, M.P.; Cross, R.; Potter, N.; Davidson, C.; Taylor, S.; Brown, R.; Huang, H.; Parsons, J.; Tucker, S.; Wynne, E.; et al. Future local passenger transport system scenarios and implications for policy and practice. Transp. Policy 2020, 90, 52–67. [Google Scholar] [CrossRef]
- Utriainen, R.; Pöllänen, M. Review on mobility as a service in scientific publications. Res. Transp. Bus. Manag. 2018, 27, 15–23. [Google Scholar] [CrossRef]
- Wang, L.; Zhong, H.; Ma, W.; Abdel-Aty, M.; Park, J. How many crashes can connected vehicle and automated vehicle technologies prevent: A meta-analysis. Accid. Anal. Prev. 2020, 136, 105299. [Google Scholar] [CrossRef] [PubMed]
- Waymo. On the road to fully self-driving. In Waymo Safety Report; Waymo: Mountain View, CA, USA, 2018. [Google Scholar]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A 2015, 77, 167–181. [Google Scholar] [CrossRef]
- U.S. Department of Transportation. Preparing for the Future of Transportation: Automated Vehicles 3.0; U.S. Department of Transportation: Washington, DC, USA, 2018.
- SAE. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE: Warrendale, PA, USA, 2018. [Google Scholar]
- Bagloee, S.A.; Tavana, M.; Asadi, M.; Oliver, T. Autonomous vehicles: Challenges, opportunities, and future implications for transportation policies. J. Mod. Transp. 2016, 24, 284–303. [Google Scholar] [CrossRef] [Green Version]
- Elliott, D.; Keen, W.; Miao, L. Recent advances in connected and automated vehicles. J. Traffic Transp. Eng. 2019, 6, 109–131. [Google Scholar] [CrossRef]
- European Commission. Digital Technologies Make Transport and Mobility Smarter, Safer and Greener. Available online: https://ec.europa.eu/digital-single-market/en/mobility (accessed on 30 April 2020).
- Singh, S. Critical reasons for crashes investigated in the National Motor Vehicle Crash Causation Survey. In Traffic Safety Facts Report No. DOT HS 812 115; National Highway Traffic Safety Administration: Washington, DC, USA, 2015. [Google Scholar]
- Morando, M.M.; Tian, Q.; Truong, L.T.; Vu, H.L. Studying the Safety Impact of Autonomous Vehicles Using Simulation-Based Surrogate Safety Measures. J. Adv. Transp. 2018, 2018, 6135183. [Google Scholar] [CrossRef]
- Combs, T.S.; Sandt, L.S.; Clamann, M.P.; McDonald, N.C. Automated Vehicles and Pedestrian Safety: Exploring the Promise and Limits of Pedestrian Detection. Am. J. Prev. Med. 2019, 56, 1–7. [Google Scholar] [CrossRef] [Green Version]
- OECD. Safer Roads with Automated Vehicles? International Transport Forum; OECD: Paris, France, 2018. [Google Scholar]
- World Health Organization. Global Status Report on Road Safety 2018; World Health Organization: Geneva, Switzerland, 2018. [Google Scholar]
- Litman, T. Autonomous Vehicle Implementation Predictions: Implications for Transport Planning; Victoria Transport Policy Institute: Victoria, BC, Canada, 2020. [Google Scholar]
- NTSB. Collision Between Vehicle Controlled by Developmental Automated Driving System and Pedestrian. In Proceedings of the Board Meeting, Washington, DC, USA, 19 November 2019; Available online: https://www.ntsb.gov/news/events/Documents/2019-HWY18MH010-BMG-abstract.pdf (accessed on 26 March 2020).
- NTSB. Preliminary Report. Highway HWY18FH011. Available online: https://www.ntsb.gov/investigations/AccidentReports/Reports/HWY18FH011-preliminary.pdf (accessed on 26 March 2020).
- European Commission. Annual Accident Report; European Commission, Directorate General for Transport: Brussels, Belgium, 2018. [Google Scholar]
- Georgis, N.; Carpio, F.; Hwang, P.J. Automatic Speed Limit Adjust for Road Conditions. U.S. Patent US8311734B2, 13 November 2012. [Google Scholar]
- Shetty, A.; Yu, M.; Kurzhanskiy, A.; Grembek, O.; Tavafoghi, H.; Varaiya, P. Safety challenges for autonomous vehicles in the absence of connectivity. Transp. Res. Part C Emerg. Technol. 2021, 128, 103133. [Google Scholar] [CrossRef]
- Tibljaš, A.D.; Giuffrè, T.; Surdonja, S.; Trubia, S. Introduction of autonomous vehicles: Roundabouts design and safety performance. Sustainability 2018, 10, 1060. [Google Scholar] [CrossRef] [Green Version]
- Virdi, N.; Grzybowska, H.; Waller, S.T.; Dixit, V. A safety assessment of mixed fleets with connected and autonomous vehicles using the surrogate safety assessment module. Accid. Anal. Prev. 2019, 131, 95–111. [Google Scholar] [CrossRef]
- Jeong, E.; Oh, C.; Lee, S. Is vehicle automation enough to prevent crashes? Role of traffic operations in automated driving environments for traffic safety. Accid. Anal. Prev. 2017, 104, 115–124. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the safety impact of connected and autonomous vehicles on motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef] [Green Version]
- Kitajima, S.; Shimono, K.; Tajima, J.; Antona-Makoshi, J.; Uchida, N. Multi-agent traffic simulations to estimate the impact of automated technologies on safety. Traffic Inj. Prev. 2019, 20, 58–64. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tafidis, P.; Pirdavani, A.; Brijs, T.; Farah, H. Can automated vehicles improve cyclist safety in urban areas? Safety 2019, 5, 57. [Google Scholar] [CrossRef] [Green Version]
- Ye, L.; Yamamoto, T. Evaluating the impact of connected and autonomous vehicles on traffic safety. Phys. A 2019, 526, 121009. [Google Scholar] [CrossRef]
- Yue, L.; Abdel-Aty, M.; Wu, Y.; Wang, L. Assessment of the safety benefits of vehicles’ advanced driver assistance. connectivity and low level automation systems. Accid. Anal. Prev. 2018, 117, 55–64. [Google Scholar] [CrossRef]
- Kockelman, K.M.; Boyles, S.D.; Avery, P.; Claudel, C.; Loftus-Otway, L.; Fagnant, D.; Bansal, P.; Levis, M.W.; Zhao, Y.; Liu, J.; et al. Bringing Smart Transportation to Texans: Ensuring the Benefits of a Connected and Autonomous Transport System in Texas—Final Report; The University of Texas Austin: Austin, TX, USA, 2016; p. 364. [Google Scholar]
- Kockelman, K.M.; Li, T. Valuing the safety benefits of connected and automated vehicle technologies. In Proceedings of the Transportation Research Board 95th Annual Meeting, Washington, DC, USA, 10–14 January 2016. [Google Scholar]
- Yang, C.Y.D.; Fisher, D.L. Safety impacts and benefits of connected and automated vehicles: How real are they? J. Intell. Transp. Syst. 2021, 25, 135–138. [Google Scholar] [CrossRef]
- Kockelman, K.; Avery, P.; Bansal, P.; Boyles, S.D.; Bujanovic, P.; Choudhary, T.; Clements, L.; Domnenko, G.; Fagnant, D.; Helsel, J.; et al. Implications of Connected and Autonomous Vehicles on the Safety and Operations of Roadway Networks: A Final Report; The University of Texas Austin: Austin, TX, USA, 2016; p. 185. [Google Scholar]
- Finlex. Law on Investigations of Road and Off-Road Accidents. Available online: https://www.finlex.fi/fi/laki/ajantasa/2016/20161512 (accessed on 27 March 2020).
- Kelkka, M.; Toivonen, S. Crash Violence of the Transport System (Liikennejärjestelmän Kolariväkivalta); Ministry of Transport and Communications: Helsinki, Finland, 2011.
- Hancock, P.A.; Nourbakhsh, I.; Stewart, J. On the future of transportation in an era of automated and autonomous vehicles. Proc. Natl. Acad. Sci. USA 2019, 116, 7684–7691. [Google Scholar] [CrossRef] [Green Version]
- Yang, W.; Zhang, X.; Lei, Q.; Cheng, X. Research on Longitudinal Active Collision Avoidance of Autonomous Emergency Braking Pedestrian System (AEB-P). Sensors 2019, 19, 4671. [Google Scholar] [CrossRef] [Green Version]
- Fernandes, P.; Nunes, U. Platooning With IVC-Enabled Autonomous Vehicles: Strategies to Mitigate Communication Delays, Improve Safety and Traffic Flow. IEEE Trans. Intell. Transp. Syst. 2012, 13, 91–106. [Google Scholar] [CrossRef]
- Utriainen, R.; Pollanen, M.; Liimatainen, H.I. The Safety Potential of Lane Keeping Assistance and Possible Actions to Improve the Potential. IEEE Trans. Intell. Veh. 2020, 5, 556–564. [Google Scholar] [CrossRef]
- Kühn, W.; Muller, M.; Höppner, T. Road Data as Prior Knowledge for Highly Automated Driving. Transp. Res. Procedia 2017, 27, 222–229. [Google Scholar] [CrossRef]
- Noy, I.Y.; Shinar, D.; Horrey, W. Automated driving: Safety blind spots. Saf. Sci. 2018, 102, 68–78. [Google Scholar] [CrossRef]



| Immediate Risk Factor (Code of the Crash Type in Parentheses) | Control of the Car in the Pre-Crash Event | Estimated Speed/ Speed Limit (km/h) | Requirements for CAV | V2V or V2I Communication Need |
|---|---|---|---|---|
| Incorrect observation on car’s location on roadway, normal conditions (20) | Loss of control (A) on curve with braking | NA/80 | (2) | No |
| Wrong driving path, normal conditions (21) | Loss of control (A) on curve without braking | 60/60 | (2) | No |
| Wrong driving path, dark (21) | Car was under control (B) until the crash on curve | 80/80 | (2) | No |
| Wrong driving path, wet road surface and dark (20) | Car was under control (B) until the crash on straight section | 75/80 | (2), (8) | No |
| Wrong driving path, snowy road surface, sleet (21) | Control was unknown on curve | 60/60 | (3), (8) | No |
| Wrong judgment on own possibilities to proceed, snowy road surface (21) | Loss of control (A) on curve, braking status unknown | 45/50 | (3), (8) | No |
| Wrong judgment on own possibilities to proceed, icy road surface, sleet (21) | Loss of control (A) on curve after overtaking, braking status unknown | 110/100 | (3), (4), (8) | No |
| Steering error, normal conditions (20) | Loss of control (A) on straight section, braking status unknown | 100/100 | (1) | No |
| Steering error, wet road surface, dark (20) | Loss of control (A) on straight section, braking status unknown | 80/80 | (3) | No |
| Steering error, icy road surface, tarmac (20) | Loss of control (A) on straight section, braking status unknown | 70/100 | (3), (8) | No |
| Steering error, icy road surface, dark (20) | Loss of control (A) on straight section, braking status unknown | 80/80 | (3), (8) | No |
| Steering error, snowy road surface, sleet (21) | Loss of control (A) on curve, braking status unknown | 75/100 | (3), (8) | No |
| Steering error, snowy road surface, snowfall (20) | Loss of control (A) on straight section, braking status unknown | 80/80 | (3), (8) | No |
| Steering error, snowy road surface (21) | Loss of control (A) on curve, braking status unknown | 90/100 | (3) | No |
| Steering error, snowy and locally icy road surface (24) | Loss of control (A) on curve after overtaking, braking status unknown | 80/80 | (3), (4), (8) | On locally icy conditions |
| Steering error, locally icy road surface (20) | Loss of control (A) on straight section without braking | 80/80 | (3), (8) | On locally icy conditions |
| Steering error, locally icy road surface, fog, dark (20) | Loss of control (A) on straight section, braking status unknown | 90/100 | (3) | On locally icy conditions |
| Steering error, snowy road surface (20) | Car was not steered (C) on straight section | 87/80 | (5), (8) | No |
| Other driving-related act, snowy road surface, rainfall, dark (20) | Loss of control (A) on straight section, braking status unknown | 50/50 | (3) | No |
| Overtaking or approaching an intersection without proper anticipation, dark (23) | Overtaking and crash with a car on lane of opposite direction, car was under control (B) | 85/80 | (4) | On the whereabouts of other cars |
| Immediate Risk Factor (Code of the Crash Type in Parentheses) | Control of the Car in the Pre-Crash Event | Estimated Speed/Speed Limit (km/h) | Requirements for CAV | V2V or V2I Communication Need |
|---|---|---|---|---|
| Incorrect observation of car’s location on roadway, gravel-paved road (80) | Loss of control (A) on straight section, braking status unknown | 70/80 | (2), (8) | No |
| Wrong judgment on own possibilities to proceed, snowy road surface (84) | Loss of control (A) on curve without braking | 60/80 | (3), (8) | No |
| Wrong judgment on own possibilities to proceed, gravel-paved road, dark (81) | Loss of control (A) on straight section, braking status unknown | 90/80 | (1), (8) | No |
| Wrong judgment on own possibilities to proceed, gravel-paved road, dark (83) | Loss of control (A) on curve with braking | 80/80 | (1), (8) | No |
| Wrong judgment on own possibilities to proceed, gravel-paved road, icy road surface, snowfall (83) | Loss of control (A) on curve, braking status unknown | NA/80 | (3), (8) | No |
| Wrong judgment on own possibilities to proceed, normal conditions (81) | Loss of control (A) on straight section after overtaking, braking status unknown | NA/80 | (1), (4), (8) | No |
| Steering error, snowy road surface, snowfall, dark (84) | Loss of control (A) on curve without braking | NA/100 | (3), (8) | No |
| Steering error, wet road surface, rainfall (81) | Loss of control (A) on straight section, braking status unknown | NA/100 | (3) | No |
| Steering error, icy road surface (80) | Loss of control (A) on straight section, braking status unknown | 80/80 | (3), (8) | No |
| Steering error, icy road surface (80) | Loss of control (A) on curve, braking status unknown | 75/80 | (3), (8) | No |
| Steering error, wet road surface, rainfall (84) | Loss of control (A) on straight section, braking status unknown | 120/120 | (3) | No |
| Steering error, icy road surface (81) | Loss of control (A) on straight section after overtaking, braking status unknown | 80/80 | (3), (4), (8) | No |
| Steering error, wet road surface (80) | Loss of control (A) on straight section, braking status unknown | NA/60 | (3) | No |
| Steering error, icy road surface, dark (84) | Loss of control (A) on curve, braking status unknown | 70/80 | (3), (8) | No |
| Steering error, normal conditions (80) | Loss of control (A) on straight section without braking | 95/80 | (1) | No |
| Other anticipation-related act, normal conditions (84) | Loss of control (A) on curve, without braking | 110/100 | (1) | No |
| Immediate error unclear, normal conditions (84) | Loss of control (A) on curve, without braking | 90/100 | (1) | No |
| Other driver-related act, snowfall (99) | Car was under control (B) until the crash in parking area | 20/30 | (2), (8) | No |
| Immediate Risk Factor (Code of the Crash Type in Parentheses) | Control of the Car in the Pre-Crash Event | Estimated Speed/Speed Limit (km/h), TTC | Requirements for CAV | V2V or V2I Communication Need |
|---|---|---|---|---|
| Intersection crashes: | ||||
| Driver did not recognize other involved car, icy road surface (53) | Car was under control (B), turning at intersection | 10/80 TTC: 0.5 s | (6), (8) | On the whereabouts of other cars |
| Driver did not recognize other involved car, normal conditions (30) | Car was under control (B), turning at intersection | 15/80 TTC: 1.5 s | (6) | On the whereabouts of other cars |
| Driver did not recognize other involved car, gravel-paved road (40) | Car was under control (B), going straight ahead at intersection | 30/80 TTC: 1.0 s | (6), (8) | On the whereabouts of other cars |
| Driver did not recognize other involved car, wet road surface, rainfall (40) | Car was under control (B), going straight ahead at intersection | 40/50 TTC: 0 s | (6) | On the whereabouts of other cars |
| Overtaking or approaching an intersection without proper anticipation, wet road surface, rainfall, dark (40) | Car was under control (B), going straight ahead at intersection | 30/50 TTC: 0 s | (6) | On the whereabouts of other cars |
| Incorrect observation of traffic environment, normal conditions (53) | Car was under control (B), turning at intersection | 20/50 TTC: 1.0 s | (6) | On the whereabouts of other cars |
| Incorrect observation of traffic environment, normal conditions (53) | Car was under control (B), turning at intersection | 10/100 TTC: 0.5 s | (6), (8) | On the whereabouts of other cars |
| Incorrect observation of other involved car, wet road surface, rainfall (30) | Car was under control (B), turning at intersection | 10/100 TTC: 0.5 s | (6) | On the whereabouts of other cars |
| Rear-end crashes: | ||||
| Incorrect observation of other involved car, snowy road surface, sleet, dark (9) | Car was under control (B) until the crash on a curve | 80/80 TTC: 2 s | (3), (7), (8) | On the whereabouts of other cars |
| Wrong driving path, normal conditions (1) | Loss of control (A) on straight section after overtaking, braking status unknown | 85/80 TTC: 0 s | (4) | On the whereabouts of other cars |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Utriainen, R.; Pöllänen, M. The Needed Features of Connected and Automated Vehicles to Prevent Passenger Car Crashes Caused by Driving Errors. Future Transp. 2021, 1, 370-386. https://doi.org/10.3390/futuretransp1020021
Utriainen R, Pöllänen M. The Needed Features of Connected and Automated Vehicles to Prevent Passenger Car Crashes Caused by Driving Errors. Future Transportation. 2021; 1(2):370-386. https://doi.org/10.3390/futuretransp1020021
Chicago/Turabian StyleUtriainen, Roni, and Markus Pöllänen. 2021. "The Needed Features of Connected and Automated Vehicles to Prevent Passenger Car Crashes Caused by Driving Errors" Future Transportation 1, no. 2: 370-386. https://doi.org/10.3390/futuretransp1020021
APA StyleUtriainen, R., & Pöllänen, M. (2021). The Needed Features of Connected and Automated Vehicles to Prevent Passenger Car Crashes Caused by Driving Errors. Future Transportation, 1(2), 370-386. https://doi.org/10.3390/futuretransp1020021