
An Iterative Bayesian Algorithm for 3D Image Reconstruction Using Multi-View Compton Data †


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. LMMRFMaP Algorithm
- cannot be a neighbor of itself (i.e., );
- If is a neighbor of , then must be a neighbor of (i.e., ).
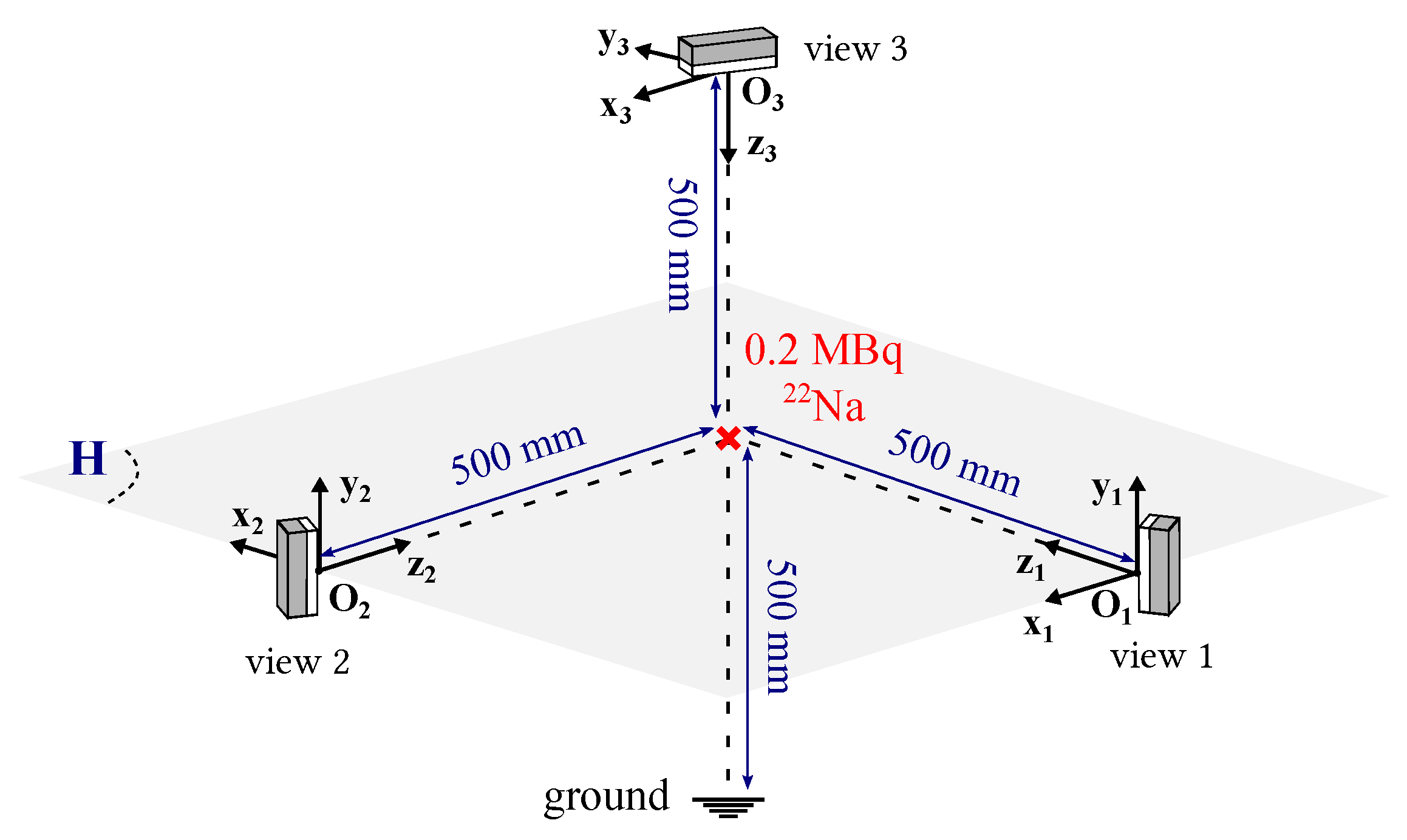
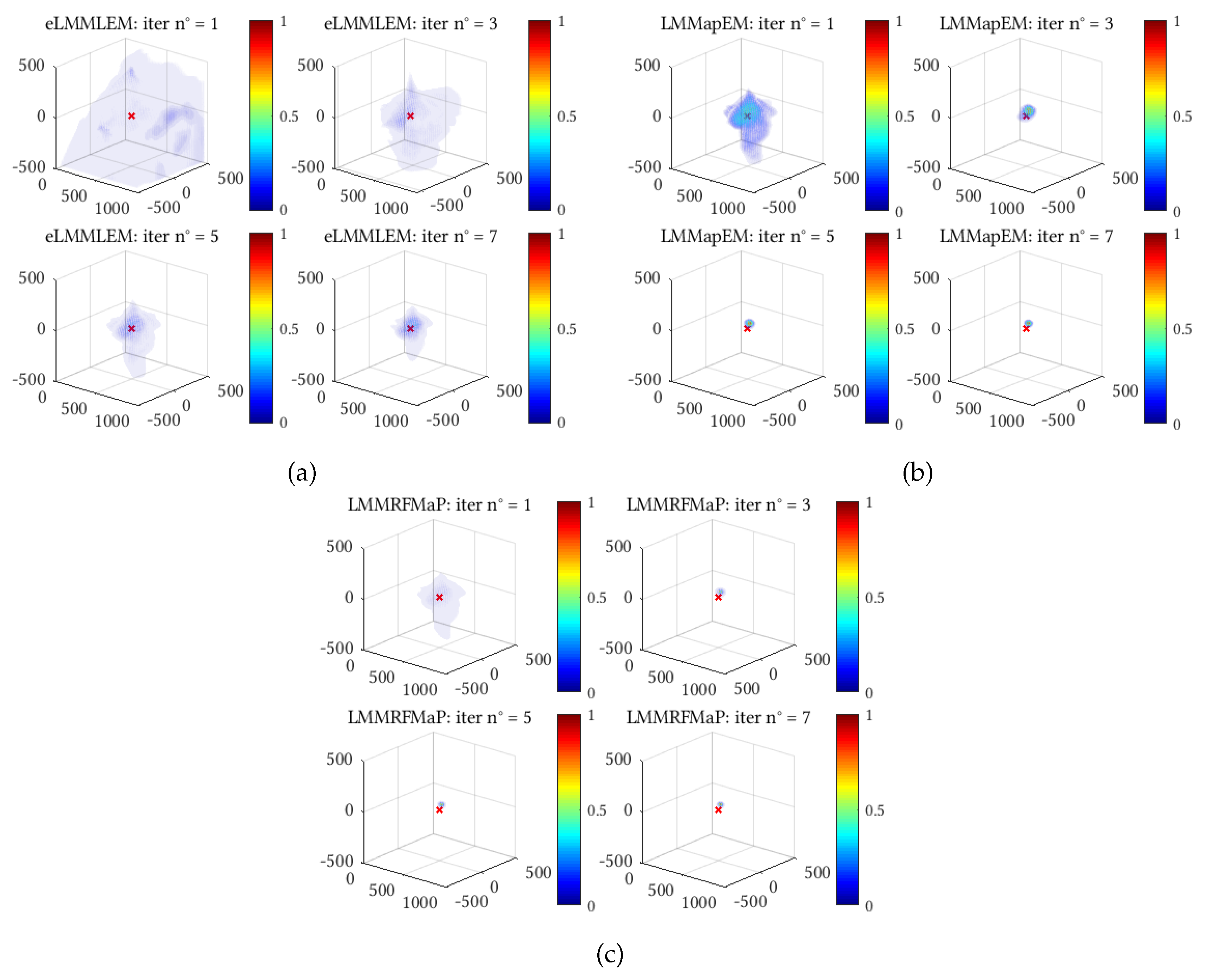
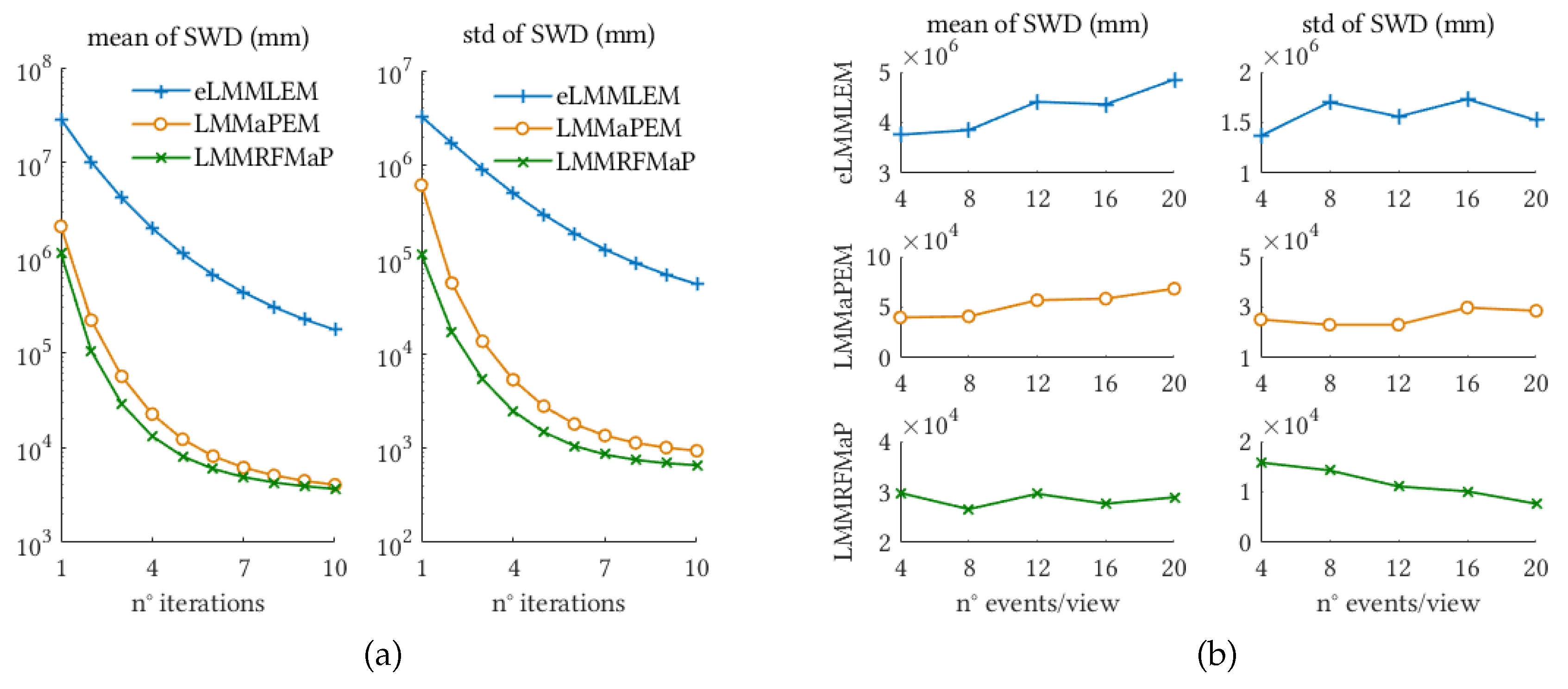
3. Numerical Experiments and Comparative Studies
- For the LMMaPEM algorithm:
- For the LMMRFMaP algorithm:
4. Conclusions and Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kinahan, P.E.; Defrise, M.; Clackdoyle, R. Analytic image reconstruction methods. In Emission Tomography: The Fundamentals of PET and SPECT; Elsevier Academic Press: Cambridge, MA, USA, 2004; Chapter 20; pp. 421–442. [Google Scholar]
- Lalush, D.S.; Wernick, M.N. Iterative image reconstruction. In Emission Tomography: The Fundamentals of PET and SPECT; Elsevier Academic Press: Cambridge, MA, USA, 2004; Chapter 21; pp. 443–472. [Google Scholar]
- Maxim, V. Filtered backprojection reconstruction and redundancy in Compton camera imaging. IEEE Trans. Image Process. 2014, 23, 332–341. [Google Scholar] [CrossRef] [PubMed]
- Parajuli, R.K.; Sakai, M.; Parajuli, R.; Tashiro, M. Development and Applications of Compton Camera—A Review. Sensors 2022, 22, 7374. [Google Scholar] [CrossRef] [PubMed]
- Shepp, L.; Vardi, Y. Maximum Likelihood Reconstruction for Emission Tomography. IEEE Trans. Med. Imaging 1982, 1, 113–122. [Google Scholar] [CrossRef] [PubMed]
- Parra, L.; Barrett, H.H. List-Mode Likelihood: EM Algorithm and Image Quality Estimation Demonstrated on 2-D PET. IEEE Trans. Med. Imaging 1998, 17, 228–235. [Google Scholar] [CrossRef] [PubMed]
- Sato, Y.; Terasaka, Y.; Utsugi, W.; Kikuchi, H.; Kiyooka, H.; Torii, T. Radiation imaging using a compact Compton camera mounted on a crawler robot inside reactor buildings of Fukushima Daiichi Nuclear Power Station. J. Nucl. Sci. Technol. 2019, 56, 801–808. [Google Scholar] [CrossRef]
- Geman, S.; Geman, D. Stochastic Relaxation, Gibbs distributions, and the Bayesian Restoration of Images. IEEE Trans. Pattern Anal. Mach. Intell. 1984, PAMI-6, 721–741. [Google Scholar] [CrossRef] [PubMed]
- Li, S.Z. Markov Random Field Modeling in Image Analysis, 3rd ed.; Advances in Pattern Recognition; Springer Science & Business Media: Berlin, Germany, 2009. [Google Scholar]
- Green, P.J. Bayesian reconstructions from emission tomography data using a modified EM algorithm. IEEE Trans. Med. Imaging 1990, 9, 84–93. [Google Scholar] [CrossRef] [PubMed]
- Lange, K. Convergence of EM image reconstruction algorithms with Gibbs smoothing. IEEE Trans. Med. Imaging 1990, 9, 439–446. [Google Scholar] [CrossRef] [PubMed]
- De Pierro, A.R. A modified expectation maximization algorithm for penalized likelihood estimation in emission tomography. IEEE Trans. Med. Imaging 1995, 14, 132–137. [Google Scholar] [CrossRef] [PubMed]
- Chang, J.H.; Anderson, J.M.; Votaw, J.R. Regularized image reconstruction algorithms for positron emission tomography. IEEE Trans. Med. Imaging 2004, 23, 1165–1175. [Google Scholar] [CrossRef] [PubMed]
- Bouman, C.A.; Sauer, K. A Unified Approach to Statistical Tomography Using Coordinate Descent Optimization. IEEE Trans. Med. Imaging 1996, 5, 480–492. [Google Scholar] [CrossRef]
- Le, N.; Snoussi, H.; Hmissi, M.Z.; Iltis, A.; Lebonvallet, G.; Zeufack, G. An extended list-mode MLEM algorithm for 3D Compton image reconstruction from multi-view data. In Proceedings of the 8th International Conference on Advancements in Nuclear Instrumentation Measurement Methods and Their Applications, Lucca, Italy, 12–16 June 2023. [Google Scholar]
- Wilderman, S.J.; Clinthorne, N.H.; Fessler, J.A.; Rogers, W.L. List-mode maximum likelihood reconstruction of Compton scatter camera images in nuclear medicine. In Proceedings of the IEEE Nuclear Science Symposium Conference Record, Toronto, ON, Canada, 8–14 November 1998; Volume 3, pp. 1716–1720. [Google Scholar]
- Barrett, H.H.; White, T.; Parra, L.C. List-mode likelihood. J. Opt. Soc. Am. A 1997, 14, 2914–2923. [Google Scholar] [CrossRef] [PubMed]
- Qi, J.; Leahy, R.M. Iterative reconstruction techniques in emission computed tomography. Phys. Med. Biol. 2006, 51, R541. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Wang, J.; Zeng, D.; Tao, X.; Ma, J. Regularization strategies in statistical image reconstruction of low-dose X-ray CT: A review. Med. Phys. 2018, 45, e886–e907. [Google Scholar] [CrossRef]
- Bouman, C.A. Foundations of Computational Imaging: A Model-Based Approach; SIAM—Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2022. [Google Scholar]
- Frandes, M.; Magnin, I.E.; Prost, R. Wavelet Thresholding-Based Denoising Method of List-Mode MLEM Algorithm for Compton Imaging. IEEE Trans. Nucl. Sci. 2011, 58, 714–723. [Google Scholar] [CrossRef]
- Villain, N.; Goussard, Y.; Idier, J.; Allain, M. Three-Dimensional Edge-Preserving Image Enhancement for Computed Tomography. IEEE Trans. Med. Imaging 2003, 22, 1275–1287. [Google Scholar] [CrossRef] [PubMed]
- Maxim, V.; Lojacono, X.; Hilaire, E.; Krimmer, J.; Testa, E.; Dauvergne, D.; Magnin, I.; Prost, R. Probabilistic models and numerical calculation of system matrix and sensitivity in list-mode MLEM 3D reconstruction of Compton camera images. Phys. Med. Biol. 2016, 61, 243. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le, N.; Snoussi, H.; Iltis, A. An Iterative Bayesian Algorithm for 3D Image Reconstruction Using Multi-View Compton Data. Phys. Sci. Forum 2023, 9, 2. https://doi.org/10.3390/psf2023009002
Le N, Snoussi H, Iltis A. An Iterative Bayesian Algorithm for 3D Image Reconstruction Using Multi-View Compton Data. Physical Sciences Forum. 2023; 9(1):2. https://doi.org/10.3390/psf2023009002
Chicago/Turabian StyleLe, Nhan, Hichem Snoussi, and Alain Iltis. 2023. "An Iterative Bayesian Algorithm for 3D Image Reconstruction Using Multi-View Compton Data" Physical Sciences Forum 9, no. 1: 2. https://doi.org/10.3390/psf2023009002
APA StyleLe, N., Snoussi, H., & Iltis, A. (2023). An Iterative Bayesian Algorithm for 3D Image Reconstruction Using Multi-View Compton Data. Physical Sciences Forum, 9(1), 2. https://doi.org/10.3390/psf2023009002