Development of Small UAS Beyond-Visual-Line-of-Sight (BVLOS) Flight Operations: System Requirements and Procedures


Abstract
:
1. Introduction
2. Background
3. System Requirements for BVLOS Flight Operations
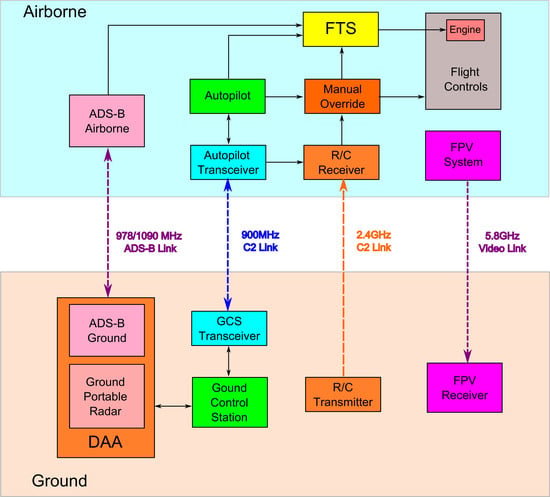
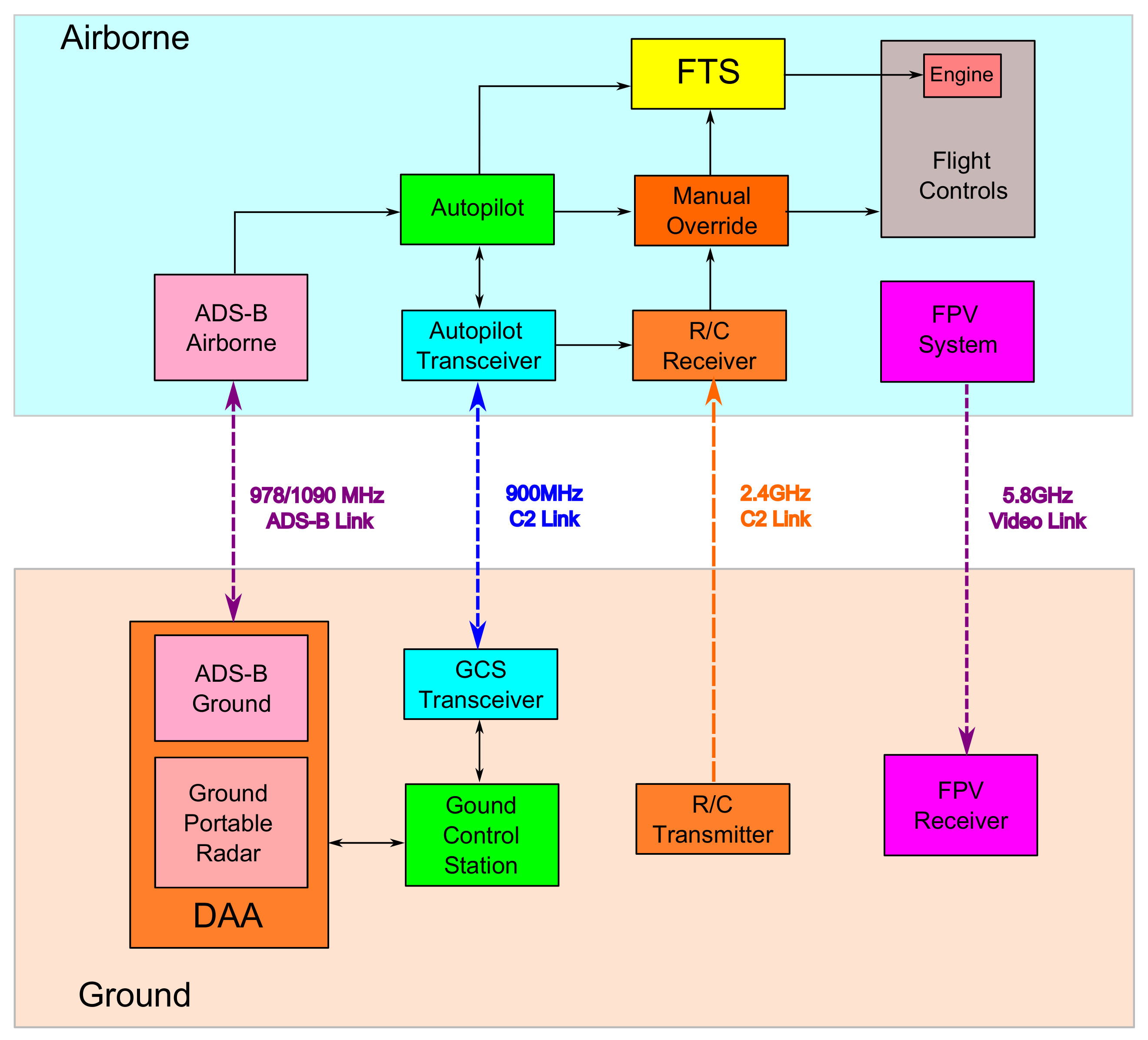
3.1. Extended Communication Links
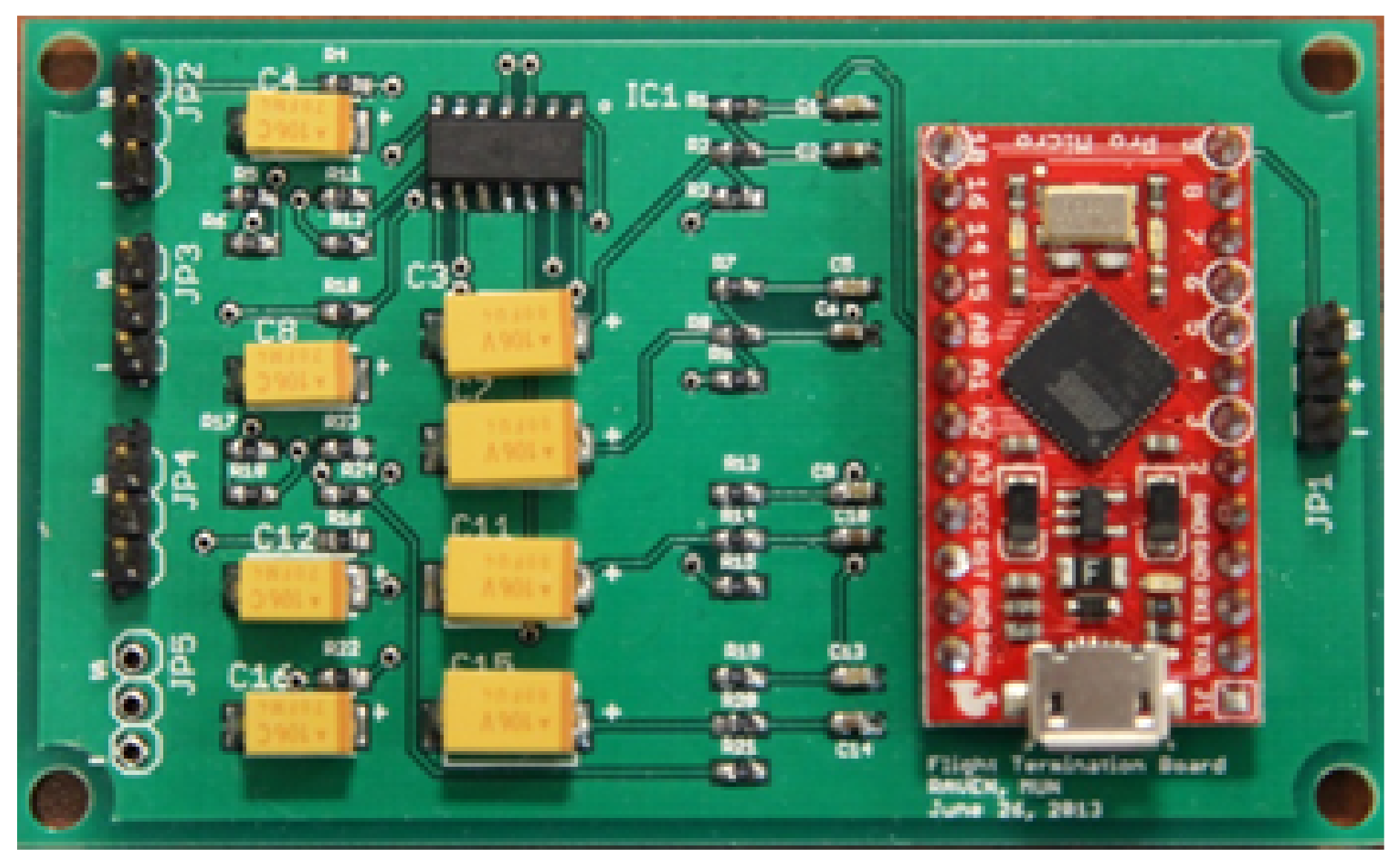
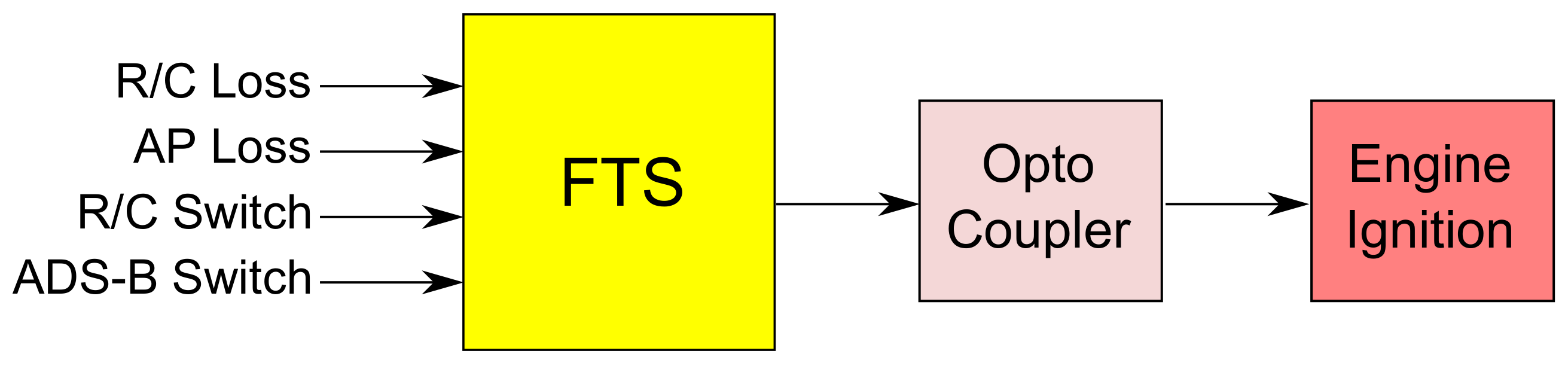
3.2. Flight Termination System
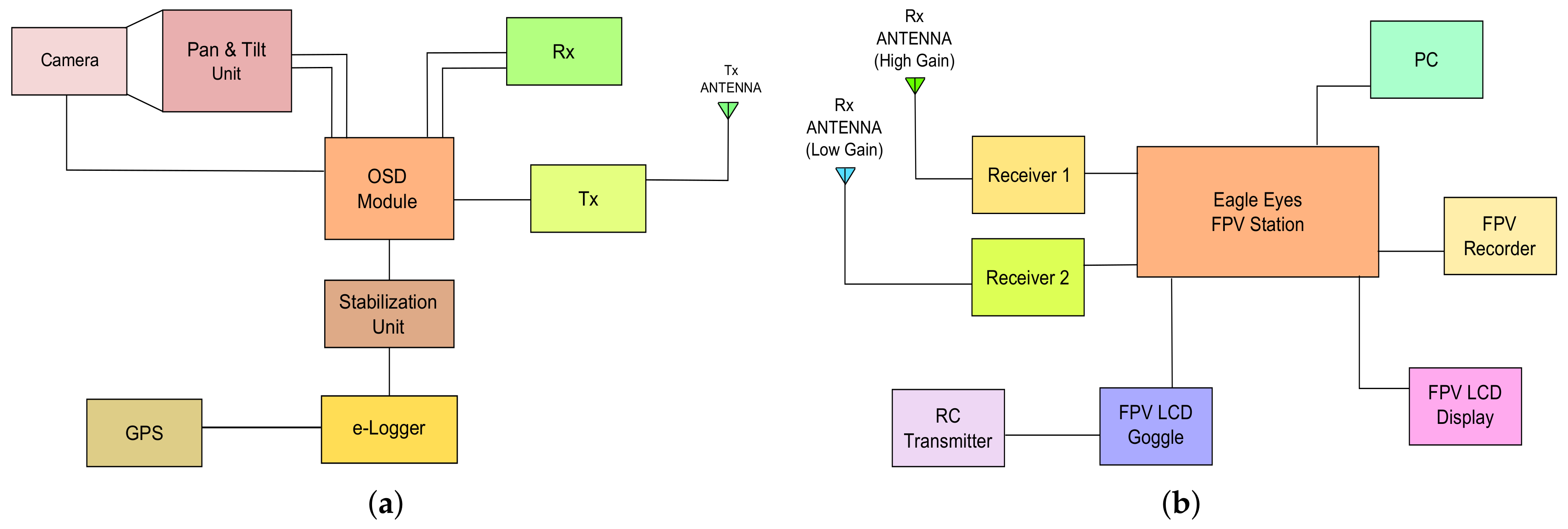
3.3. First Person View (FPV) System
3.4. Geo-Fence and Return-to-Launch (RTL) Functions
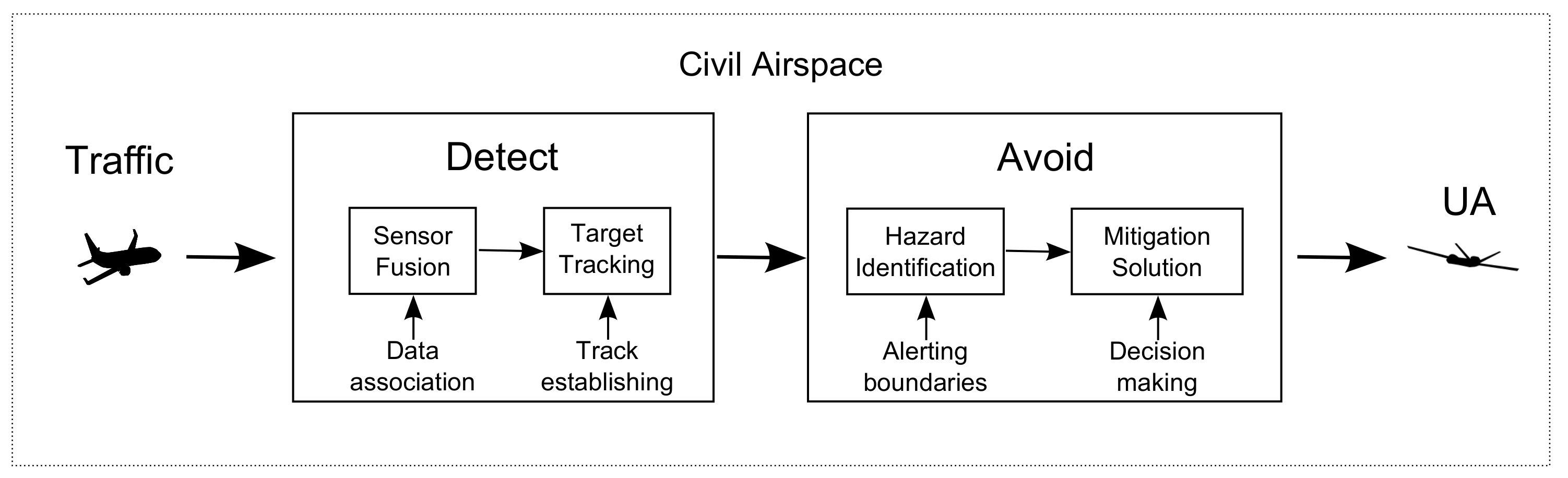
3.5. RAVEN-Proposed Small UAS DAA System
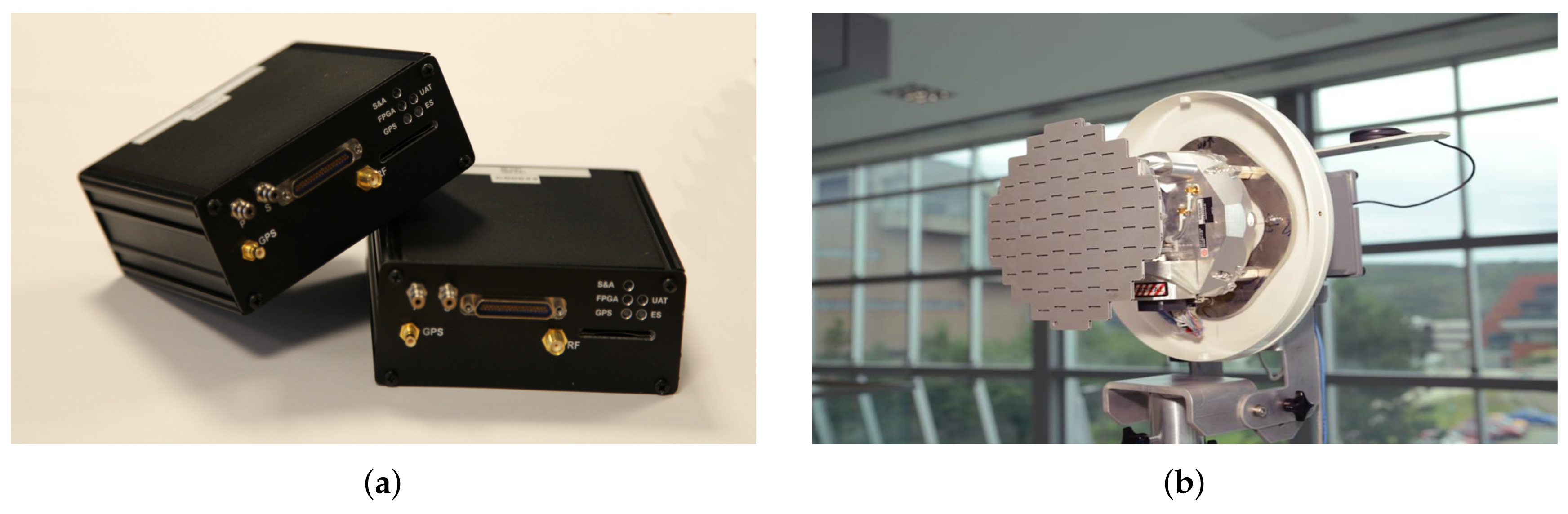
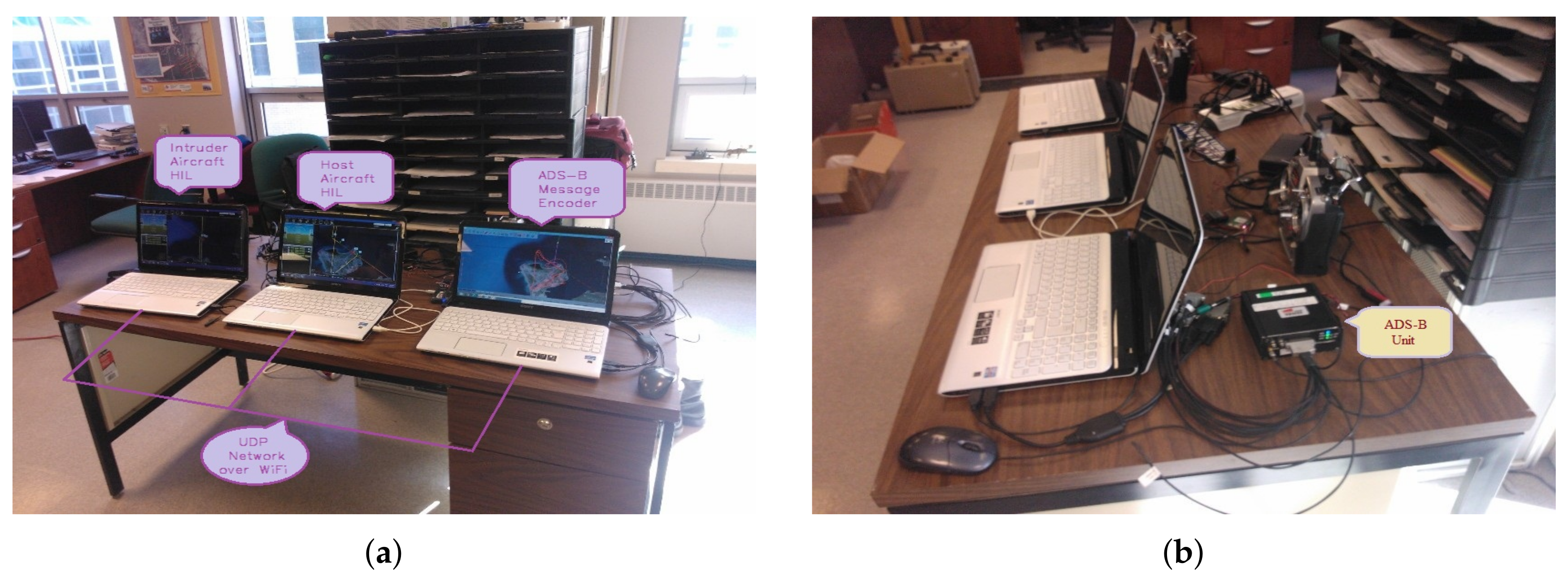
3.5.1. ADS-B for Cooperative Traffic
3.5.2. Ground Portable Radar for Non-Cooperative Traffic
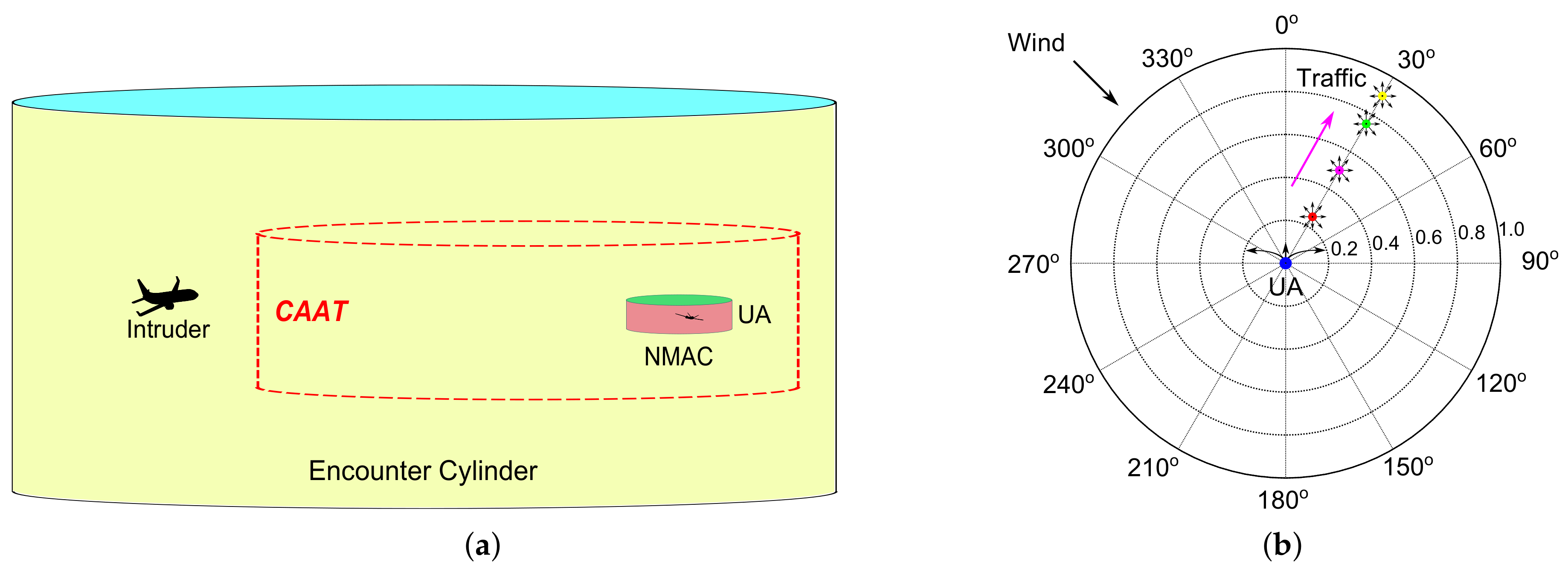
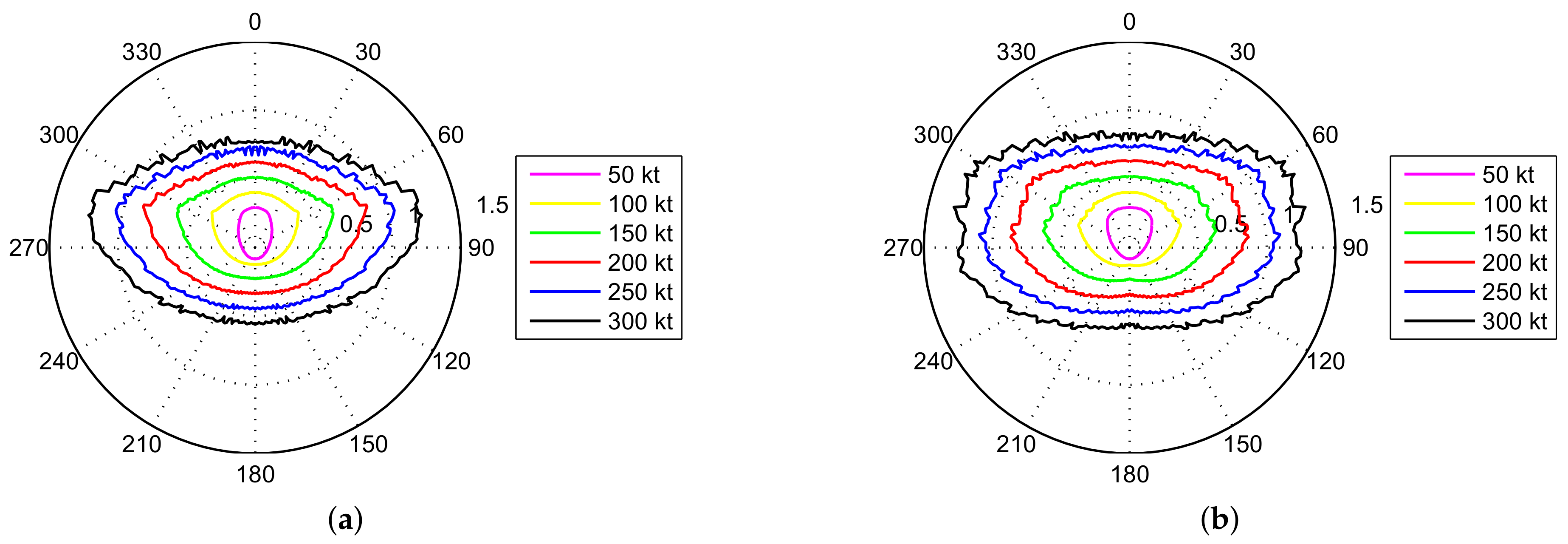
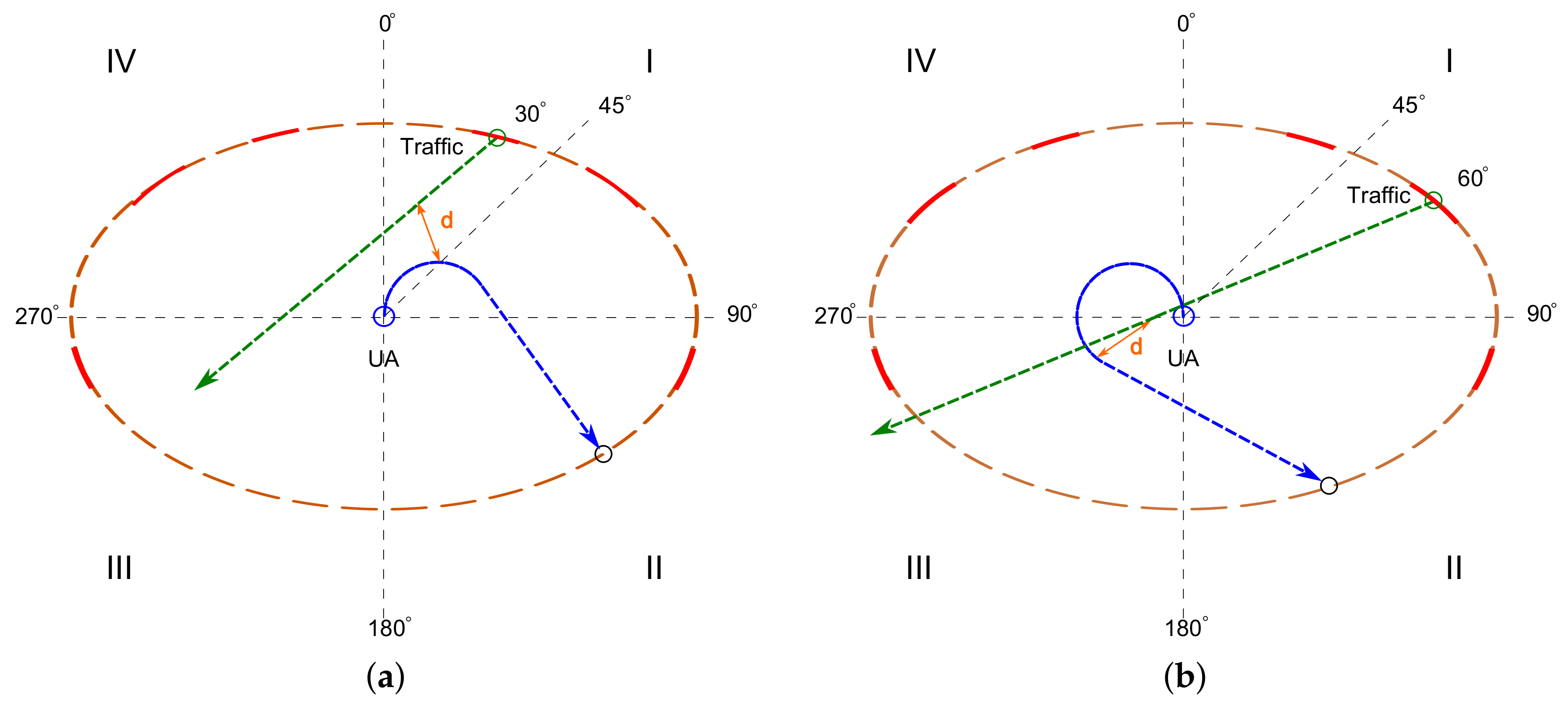
3.5.3. Determine Alerting Boundaries for Hazard Identification
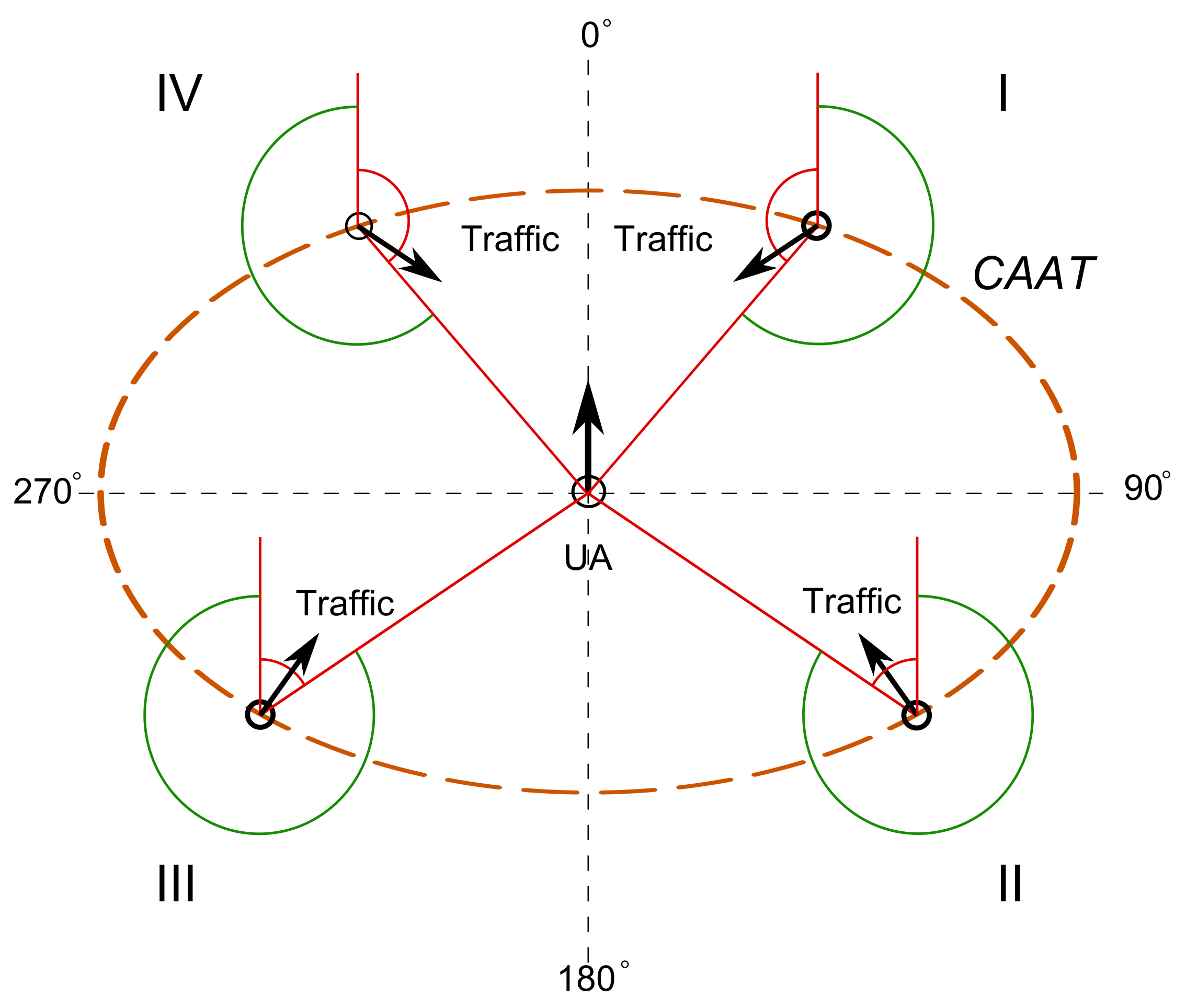
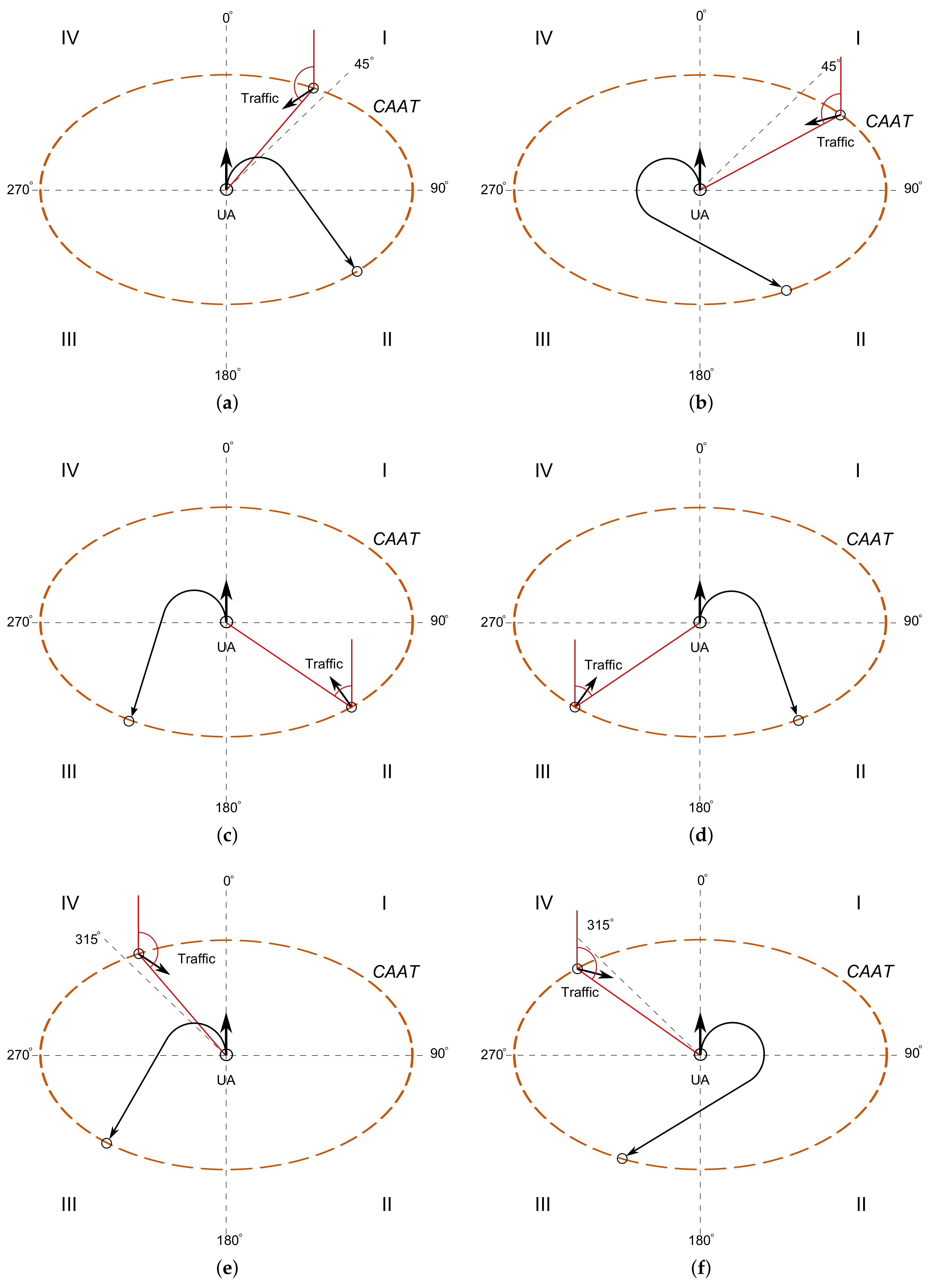
3.5.4. Evasive Maneuvering Algorithm for Collision Mitigation Solutions
4. Procedures for BVLOS Flight Operations
4.1. Standard Operating Procedure
- Install payload on the UA and fuel/charge the aircraft.
- Switch off Geo-fence from the switch on the R/C console.
- Setup FPV ground station and check for proper operation.
- Pilot-in-Command (PIC) perform the pre-flight checklist.
- PIC set Geo-fence maximum altitude to 500 m and minimum altitude to 100 m (depending on the SFOC).
- PIC set the flight plan at GCS and upload to UA.
- Manual R/C pilot take off and fly to safe altitude over 100 m and enable Geo-fence from the switch on the R/C console.
- Check for proper operation of FPV system.
- Set UA to auto mode to carry on the flight plan.
- Backup/FPV pilot observe the real-time FPV video and telemetry data during flight and manual R/C pilot observe FPV screen when UA is cruising beyond visual range.
- PIC check UA status at GCS and monitor BVLOS mission.
- Once the mission is done and UA is back on the runway, manual R/C pilot switch off Geo-fence from the toggle switch on the R/C console, take manual control and land UA.
4.2. Emergency Procedure for Link-Loss Failure Action Plans
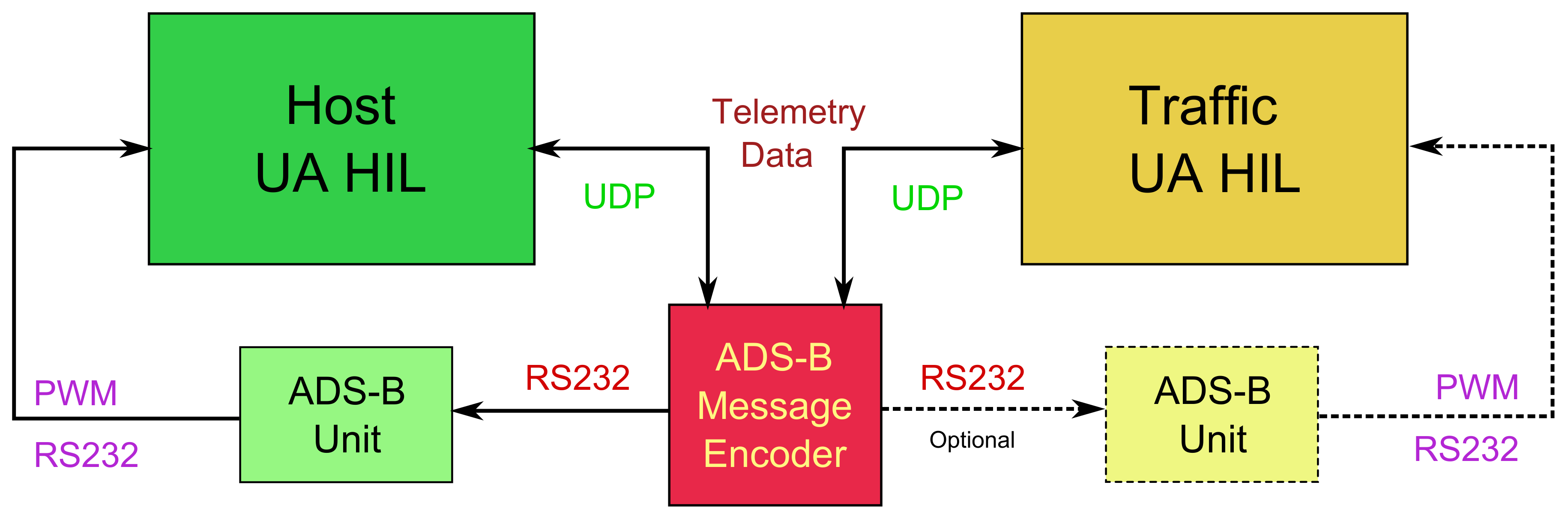
4.3. Procedure Training and System Tests on Hardware-in-Loop (HIL) Testing Platform
5. Results from BVLOS Flight Tests
6. Summary and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ADC | Analog-to-Digital Converter |
| ADS-B | Automatic Dependent Surveillance-Broadcast |
| BVLOS | Beyond Visual Line of Sight |
| C2 | Command and Control |
| CPA | Closest Point of Approach |
| COA | Certificates of Waiver or Authorization |
| DAA | Detect and Avoid |
| FAA | Federal Aviation Administration |
| FPV | First Person View |
| GA | General Aviation |
| GCS | Ground Control Station |
| HIL | Hardware-In-Loop |
| MSL | Mean Sea Level |
| PIC | Pilot-In-Command |
| PWM | Pulse Width Modulation |
| PTA | Practice Target Area |
| RF | Radio Frequency |
| R/C | Radio Control |
| RTL | Return to Launch |
| SFOC | Special Flight Operations Certificates |
| SOP | Standard Operating Procedure |
| SWaP | Size, Weight, and Power |
| TC | Transport Canada |
| TCAS | Traffic Collision Avoidance System |
| UA | Unmanned Aircraft |
| UAS | Unmanned Aircraft Systems |
| US | United States |
| VLOS | Visual Line of Sight |
Appendix A

References
- Limnaios, G.; Tsourveloudis, N.; Valavanis, K.P. Sense and Avoid in UAS: Chapter 1 Introduction. In Sense and Avoid in UAS; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2012; pp. 1–34. [Google Scholar]
- Cox, T.; Nagy, C.; Skoog, M.; Somers, I. Civil UAV Capabilities Assessment; Technical Report; National Aeronautics and Space Administration: Washington, DC, USA, 2004.
- Federal Aviation Administration (FAA). Sense and Avoid (SAA) for Unmanned Aircraft Systems (UAS); Technical Report; FAA: Washington, DC, USA, 2009.
- Fasano, G.; Accado, D.; Moccia, A.; Moroney, D. Sense and avoid for unmanned aircraft systems. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 82–110. [Google Scholar] [CrossRef]
- Federal Aviation Administration (FAA). Request a Part 107 Waiver or Operation in Controlled Airspace; FAA: Washington, DC, USA, 2018.
- Transport Canada (TC). Staff Instruction; Document No: SI 623-001; TC: Ottawa, ON, Canada, 2017. [Google Scholar]
- Federal Aviation Administration (FAA). Certificates of Waiver or Authorization (COA); FAA: Washington, DC, USA, 2017.
- Transport Canada (TC). Applying for a Special Flight Operations Certificate; TC: Ottawa, ON, Canada, 2017.
- Radio Technical Commission for Aeronautics (RTCA). Minimum Operational Performance Standards (MOPS) for Detect and Avoid (DAA) Systems; Document No: RTCA/DO-365; RTCA, Inc.: Washington, DC, USA, 2017. [Google Scholar]
- Fang, S.X.; O’Young, S. Beyond Line of Sight (BLOS) Flight Mission Technical Report; Technical Report, Raven Project; Memorial University of Newfoundland: St. John’s, NL, Canada, 2014. [Google Scholar]
- Fang, S.X.; O’Young, S. Flight Termination System Technical Report; Technical Report, Raven Project; Memorial University of Newfoundland: St. John’s, NL, Canada, 2014. [Google Scholar]
- Balage, D.; O’Young, S. First Person View (FPV) System Technical Report; Technical Report, Raven Project; Memorial University of Newfoundland: St. John’s, NL, Canada, 2014. [Google Scholar]
- Geo-Fencing in Plane; ArduPilot Dev Team: Berkeley, CA, USA, 2018.
- Fang, S.X.; O’Young, S. ADS-B Based Cooperative Autonomous Collision Avoidance System (ACAS) Technical Report; Technical Report, Raven Project; Memorial University of Newfoundland: St. John’s, NL, Canada, 2014. [Google Scholar]
- Fang, S.X.; Rolland, L.; O’Young, S. Development and Implementation of ADS-B Based Cooperative Autonomous Collision Avoidance System. In Proceedings of the Unmanned Systems Canada Conference, Montreal, QC, Canada, 4–6 November 2014. [Google Scholar]
- Rouse, C. SEM Sensor TECH Project: Zeus Radar Test Report; Technical Report; Seamatica Aerospace Limited: St. John’s, NL, Canada, 2016. [Google Scholar]
- Zeus Radar System; Seamatica Aerospace Limited: St. John’s, NL, Canada, 2016.
- Fang, S.X. Risk-Based Supervisory Guidance for Detect and Avoid Involving Small Unmanned Aircraft Systems. Ph.D. Thesis, Memorial University, St. John’s, NL, Canada, 2018. [Google Scholar]
- FlightGear Flight Simulator; FlightGear Project: Minneapolis, MN, USA, 2017.
- McGeer, T. Laima: The First Atlantic Crossing by Unmanned Aircraft; The Insitu Group: Bingen, WA, USA, 1999. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Antenna | Description |
|---|---|---|
| 1 | 900 MHz High-Gain Antenna | Supplier: L-COM Global Connectivity, Item No: HG8915EG, Specifications: 824–960 MHz, 50 Ohm, 15 dBi gain with 18° horizontal and 30° vertical beam width and VSWR < 1.5 |
| 2 | 5.8 GHz High-Gain Antenna | Supplier: L-COM Global Connectivity, Item No: HG5827EG, Specifications: 5.8 GHz, 50 Ohm, 27 dBi gain with 6° horizontal and 9° vertical beam width and VSWR < 1.5 |
| Geometric Classification | Action | Diagram |
|---|---|---|
| Traffic above UA | UA descending |  |
| Traffic below UA | UA climbing |  |
| Co-altitude and traffic climbing and | UA descending |  |
| Co-altitude and traffic levelling and | UA descending |  |
| Co-altitude and traffic descending and | UA climbing |  |
| Case | R/C Link | AP Link | FPV Link | ACTION |
|---|---|---|---|---|
| Case 1 | ✓ | ✓ | ✓ |
|
| Case 2 | ✗ | ✗ | ✓ |
|
| Case 3 | ✗ | ✗ | ✗ |
|
| Case 4 | ✓ | ✓ | ✗ |
|
| Case 5 | ✗ | ✓ | ✓ |
|
| Case 6 | ✗ | ✓ | ✗ |
|
| Case 7 | ✓ | ✗ | ✓ |
|
| Case 8 | ✓ | ✗ | ✗ |
|
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, S.X.; O’Young, S.; Rolland, L. Development of Small UAS Beyond-Visual-Line-of-Sight (BVLOS) Flight Operations: System Requirements and Procedures. Drones 2018, 2, 13. https://doi.org/10.3390/drones2020013
Fang SX, O’Young S, Rolland L. Development of Small UAS Beyond-Visual-Line-of-Sight (BVLOS) Flight Operations: System Requirements and Procedures. Drones. 2018; 2(2):13. https://doi.org/10.3390/drones2020013
Chicago/Turabian StyleFang, Scott Xiang, Siu O’Young, and Luc Rolland. 2018. "Development of Small UAS Beyond-Visual-Line-of-Sight (BVLOS) Flight Operations: System Requirements and Procedures" Drones 2, no. 2: 13. https://doi.org/10.3390/drones2020013
APA StyleFang, S. X., O’Young, S., & Rolland, L. (2018). Development of Small UAS Beyond-Visual-Line-of-Sight (BVLOS) Flight Operations: System Requirements and Procedures. Drones, 2(2), 13. https://doi.org/10.3390/drones2020013