1. Introduction
Virtual reality (VR) is currently contributing to the development of psychomotor skills in education [
1], training [
2], and healthcare [
3], among others, by allowing for immersion and exposure to scenarios that would otherwise be difficult or impossible to replicate in real life. However, despite the fact that recent breakthroughs in VR technology are mainly utilized in entertainment, one-size-fits-all solutions continue to be the norm, with advancements in comfort aimed at enhancing the user experience for more immersion and presence [
4]. However, a lack of adequate ergonomics in virtual reality can have a negative effect on the user’s immersion and presence [
5], as well as causing motion sickness [
6]. Several contributors to the poor impact on the user experience include an inadequate reach, height, and interpupillary distance, which are primarily the result of one-size-fits-all solutions.
Our research focuses on the upper limb since effective user interactions are essential for conducting real-world activities or tasks in virtual reality [
7]. Upper-limb interactions are essential in virtual reality by allowing for reaching and gripping, which require a combination of movements resulting from the 27 degrees of freedom (DOFs) from the shoulder to the wrist, [
8]. The 27 DOFs allow for the flexion and extension, abduction and adduction, and pronation and supination of the upper limb. Moving the upper limb within its range of motion should not result in tiredness and pain, which cause fatigue and/or discomfort. However, repetitive or prolonged physical activity, such as keeping arms in midair, may create weariness and elevate exertion levels, which may develop into musculoskeletal problems, such as the gorilla arm [
4]. Three-dimensional manipulation techniques can minimize cognitive stress [
1] and hazardous body movements linked with musculoskeletal illnesses [
4] when combined with good ergonomics.
Research on 3DMTs, such as isomorphic (a mathematical term meaning “sameness”) and non-isomorphic (i.e., “not the same”) techniques for reaching, selecting, and grabbing objects in VR [
9], is providing solutions for enhancing the VR user experience, such as
Erg-O, a non-isomorphic 3DMT that remaps the position of VR objects [
10]. Isomorphic and non-isomorphic 3DMTs are essential in VR applications, such as entertainment, education, healthcare, and training, to ensure that users can properly interact with the virtual environment. Object translation, commonly referred to as “distance grab,” is a typical isomorphic 3DMT in which virtual objects are translated to the user’s hand by stretching, expanding their reach. This 3DMT is included in various VR software development kits (SDKs) (e.g., Oculus, Steam VR, and the virtual reality toolkit (VRTK)) as it allows for interaction with objects out of physical reach. Although object translation improves reach, it can negatively impact immersion, presence, and embodiment as interactions no longer require arm movements matching those in VR. This scenario has sparked interest in the development of novel 3DMTs [
11,
12,
13]. Rietzler et al. (2018) [
5] examined the effects of virtual hand offsets on immersion and presence relative to the real hand location by examining the felt weight of virtual items in four tasks that allowed participants to interact with virtual objects. When portraying the weight of virtual objects, the study found that the offsets favor immersion and presence marginally.
Li, Cho, and Wartell (2018) compared the effects of offsets on four reaching conditions, focusing on efficiency, accuracy, and timely completion [
14]. The four reaching conditions were: (i) no offset (physical reach), (ii) a fixed offset where the virtual hand would be translated one meter from the real hand position, (iii) a dynamic non-isomorphic linear offset that increased the virtual reach by adjusting the magnitude of the actual hand within different distances from the HMD, and (iv) a non-isomorphic quadratic gain reach approach (similar to the
GoGo non-linear mapping technique [
15]). The study enrolled 24 participants who used the Oculus Rift DK2 (discontinued), the Leap Motion, and the Razer Hydra (a discontinued computer desktop motion-sensing VR controller that uses magnetic tracking). The test subjects were instructed to grab a color-changing sphere at four different depth clusters. The results show that participants could only reach spheres in all four cluster depths when using non-isomorphic offsets, and the dynamic offset condition (iii) outperformed all other reach techniques. It is important to note that the Leap Motion remains a relevant 3DUI for dexterity used in human–computer interactions for graphical user interfaces, exergames, and educational applications [
16]. Although the Oculus Rift DK2 and Razer Hydra are discontinued, the findings from Li, Cho, and Wartell remain fundamental for understanding the role of offsets in 3DMTs.
Another 3DMT that facilitates virtual object manipulation employs multi-object re-targeting with freehand movement, based on isomorphic visual-to-physical mapping, and an optimized computation for rendering the interactable objects with the least visual difference [
10]. Re-targeting produces ease-of-use manipulations by remapping the targets to appear closer to the user, partitioning the physical and visual space with tetrahedrons. The study presented three layouts and three re-targeting strategies to 12 participants, who completed nine trials in total. The three layouts included one employing a a normal mode or physical reach mode, and two variations of the proposed
Erg-O 3DMT for spacial consistent and ergonomics.
Murillo, Subramanian, and Plasencia [
10] used re-targeting to facilitate VE manipulation by remapping the targets closer to the user. This approach allows for multi-object re-targeting with freehand movement, isomorphic visual-to-physical mapping, and an optimized computation for rendering interactable objects with the least visual discrepancy. Participants in the study were presented with three interaction layouts and three 3DMTs. The layouts consisted of (i) 15 spheres arranged in a 5 × 3 grid, (ii) 24 spheres distributed evenly within the participant’s reach, and (iii) 24 spheres placed beyond the participant’s reach. The 3DMTs included a normal mode (physical reach) and two variations of
Erg-O, focusing on spatial consistency by leveraging visual dominance to keep VR elements close to the user rather than focusing on ergonomics to maintain objects within comfortable reach. Participants completed surveys regarding comfort and physical exertion. The study’s findings indicate that spatially consistent remapping can reduce task execution times, whereas ergonomic configurations lead to the least amount of overstretching.
Wentzel, d’Eon, and Vogel [
17] compared low and high non-linear input amplification techniques to create virtual offsets for
Erg-O to better understand their role in comfort, physical motion path length, virtual motion path length, ease of reach, overstretching, body ownership, and sense of control.
Erg-O was replicated, and ergonomics were calculated using the HTC Vive Pro HMD in conjunction with compatible HTC Vive trackers strapped to the participants’ shoulders, elbows, and waist, as well as the Vive controllers and a Microsoft Kinect for body tracking. The study recruited 18 participants (9 of whom had moderate VR experience) and presented them with three different offset layouts: (i) no amplification, (ii) low amplification, and (iii) high amplification, in addition to three variations of
Erg-O, including ergonomics, reach limits, and world fixation. The results demonstrate an increased comfort without reducing the task performance or body ownership when participants utilized the amplification layouts. Furthermore, physical path lengths decreased whereas virtual path lengths increased due to the offset created in the VE. No differences in time to completion were found, and comfort was determined by comparing the arm movement with comfortable ergonomic shoulder and elbow flexion and extension.
A follow-up study saw the recruitment of 18 participants (11 of whom had prior VR experience) who now experienced offset amplifications ranging from 0 percent to 45 percent at 5 percent increase intervals [
17]. For this study, the HTC Vive trackers were removed in favor of body tracking using the Microsoft Kinect. At the same time, the VR headset was changed to the Oculus Rift S for a simplified setup, not requiring external tracking cameras for the headset. According to the second study, the offset’s slope could not be less than one, and offsets that increase a user’s arm reach by up to 30 percent are acceptable as long as the user maintains a sense of body ownership. Wentzel, d’Eon, and Vogel concluded that the participants’ performance and time completion results were comparable to the
Erg-O method. Nevertheless, their offset method is more easily reproducible in numerous VR and VE applications.
The evolution of 3DMTs toward providing manipulation techniques with a greater reach has led to the development of isomorphic and non-isomorphic solutions and their impacts on the overall user experience. According to the related works, offsets are crucial in extending the user’s arm for interactions beyond their physical reach. For example, adding reach offsets can improve efficiency, accuracy, immersion, and task completion. Other approaches consider the upper limb’s maximum reach to re-map targets closer to the user, but still out of physical reach, with positive effects on comfort, completion time, and physical effort. Finally, other methods employ linear amplifications to compensate for the user’s reach in virtual reality, influencing comfort, embodiment, and task performance. While offsets and maximum reach provide manipulation techniques to improve the user experience, the related works do not integrate ergonomic ranges of motion as part of the 3DMT.
Ergonomic ranges of motion measure the impact of reach on the interactions [
17]. In order to prevent overexertion or musculoskeletal disorders such as the gorilla arm [
4], it is essential to keep movements within the ergonomic comfort range of movement. As the use of virtual reality (VR) continues to grow in popularity, one-size-fits-all ergonomics fail to account for user diversity. For instance, the COVID-19 pandemic increased VR adoption as a means of overcoming the limitations of traditional video calls in order to develop experiential learning and hands-on experiences [
18], elderly care [
19], and social connectedness [
20], among others. By combining manipulation techniques for 3DUI principles and ergonomics, we intend to address one-size-fits-all reach in VR by factoring the upper-limb range of motion within a comfortable range.
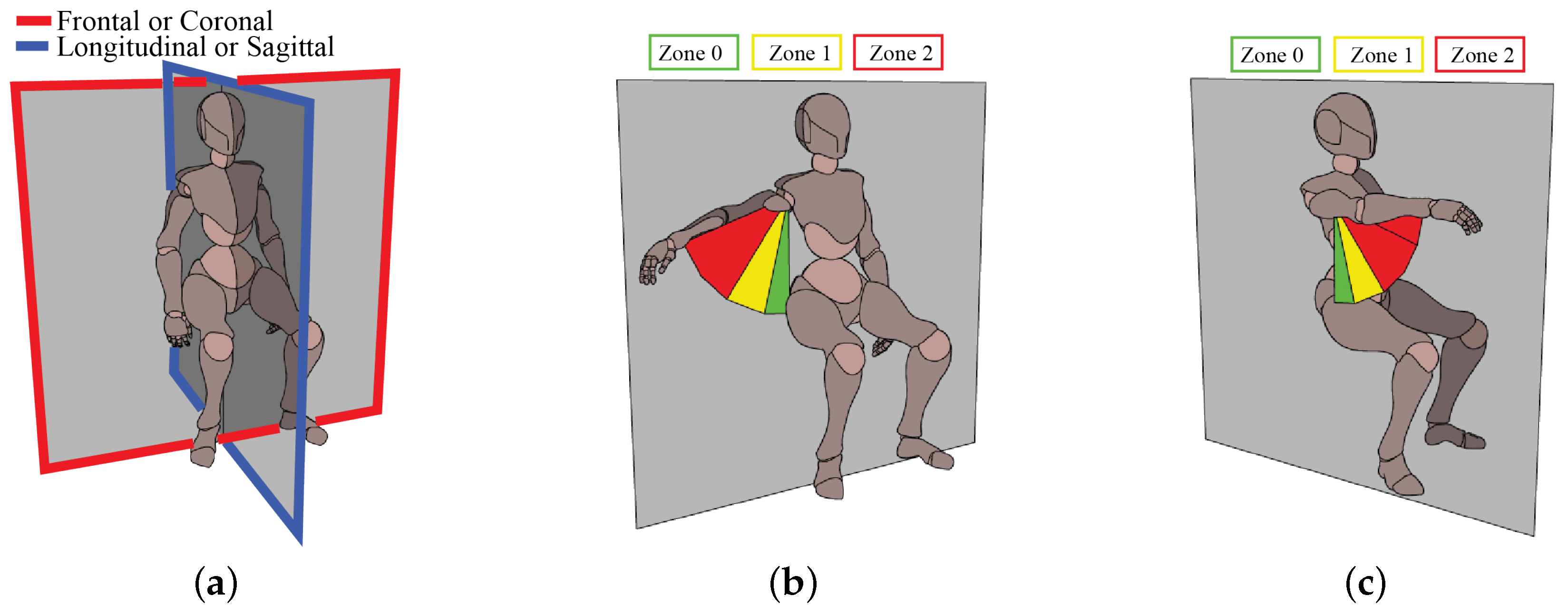
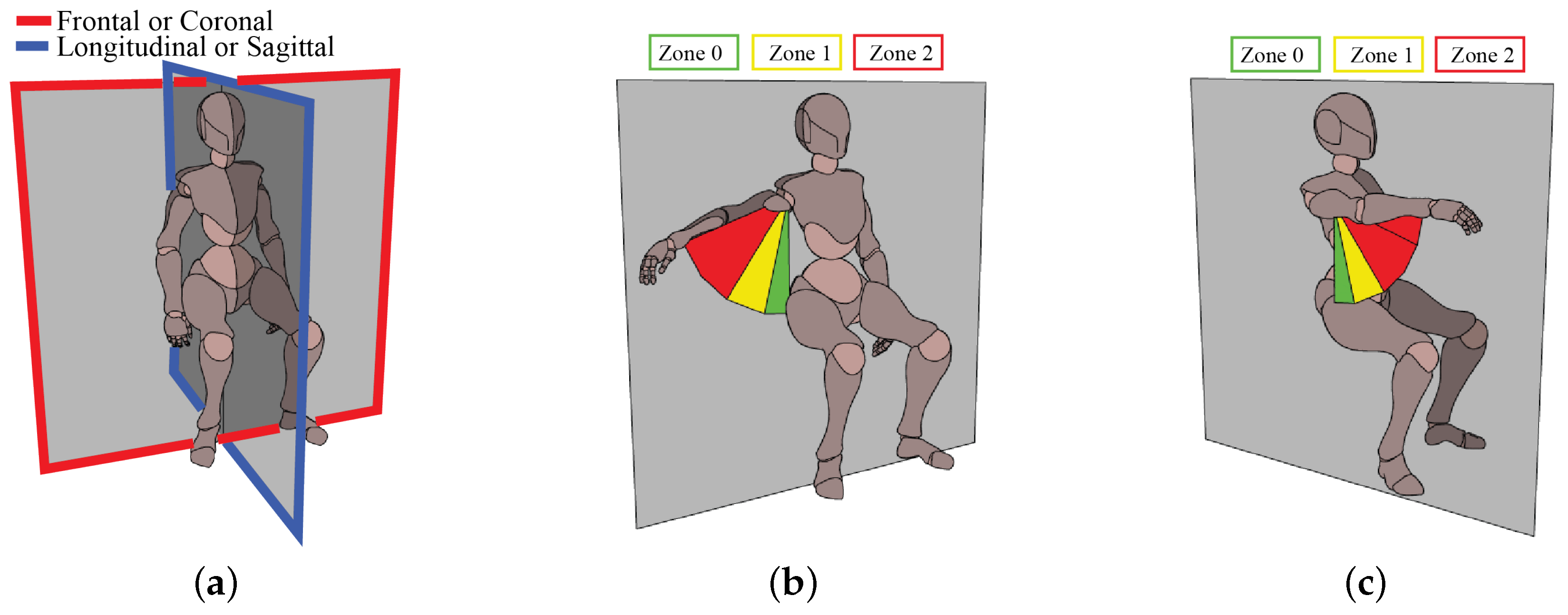
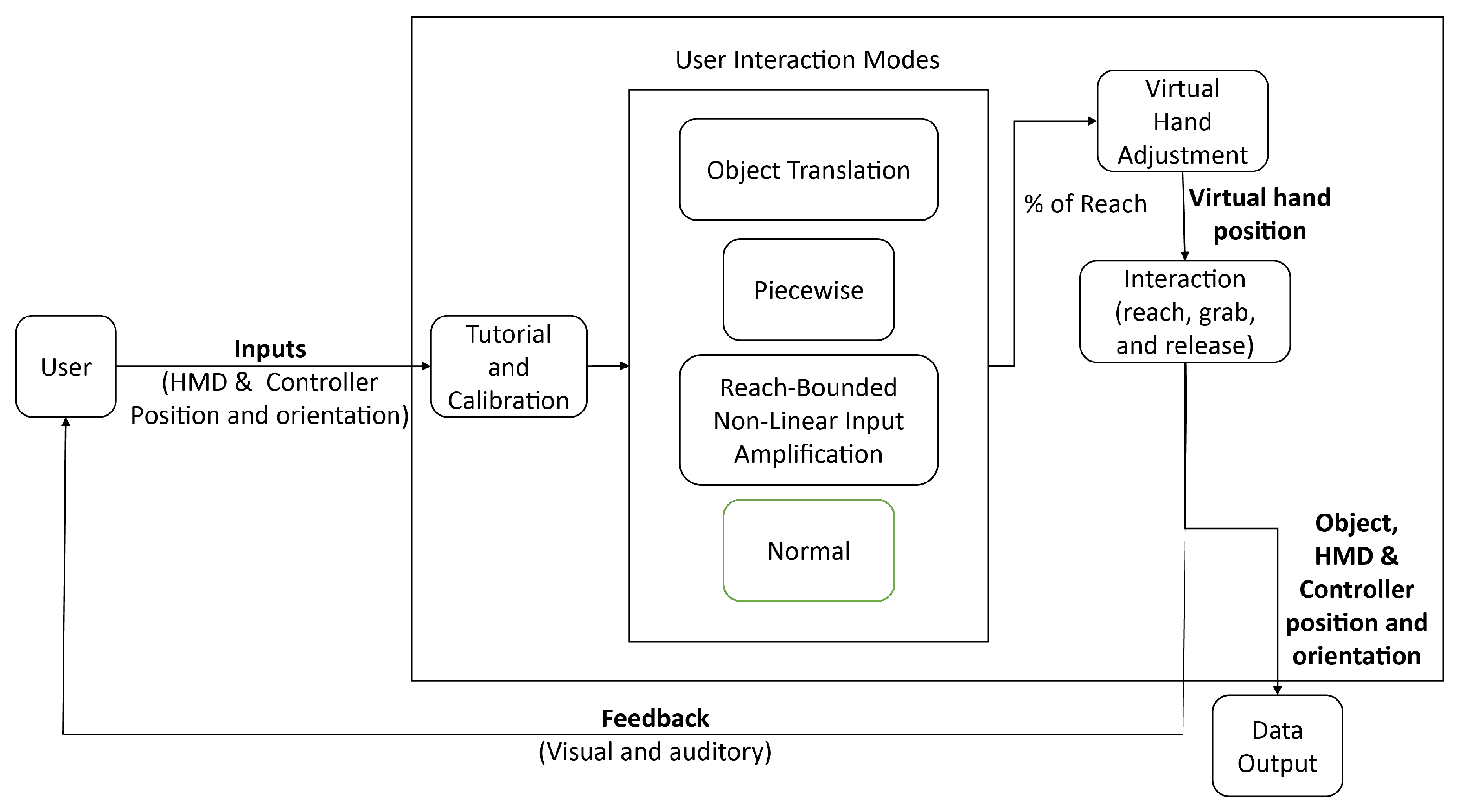
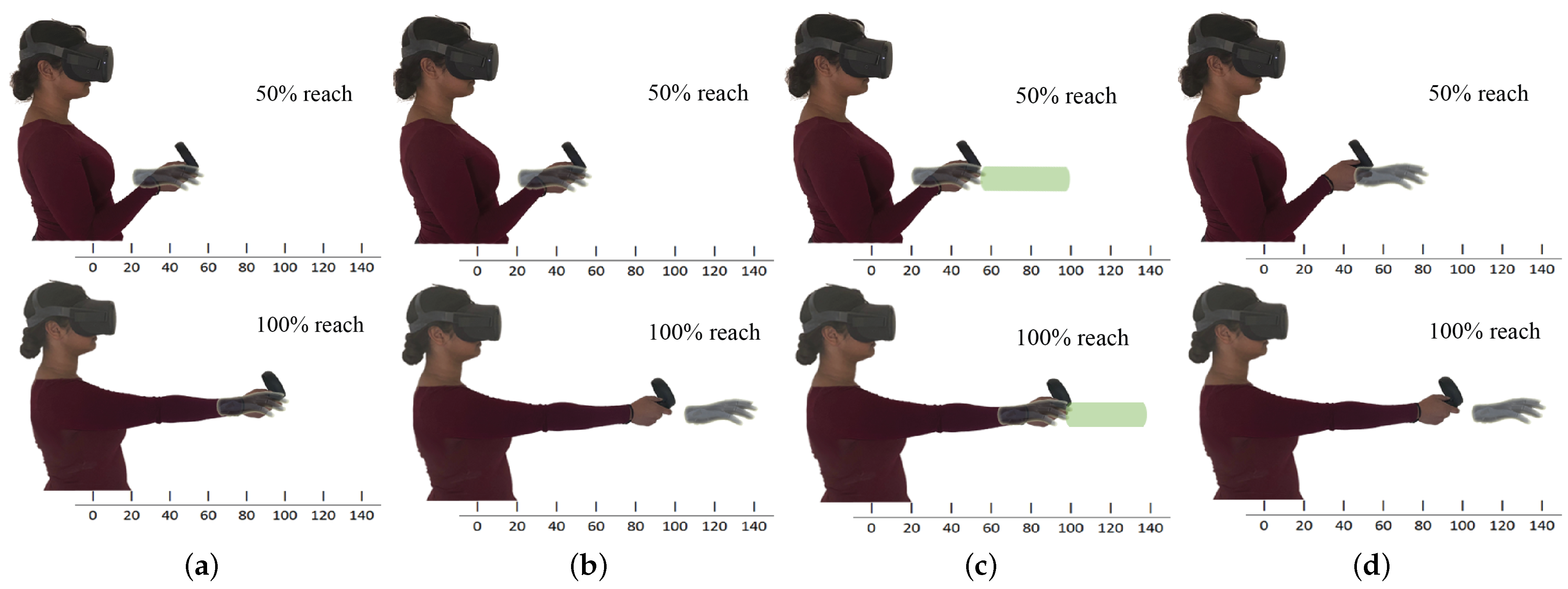
In this paper, we present the development and evaluation of
Piecewise, a non-isomorphic 3DMT for reaching and grabbing objects in VR that considers the ergonomics of the upper limb. We investigated the effects of accounting for upper-limb ergonomics on time to completion, task completion, percentage of reach, upper-body lean, engagement, and presence when compared to typical 3DMT methods, such as object translation (distance grab), reach-bounded non-linear input amplification (RBNLIA) [
17], and the normal mode that relies on physically reaching for the objects in VR.
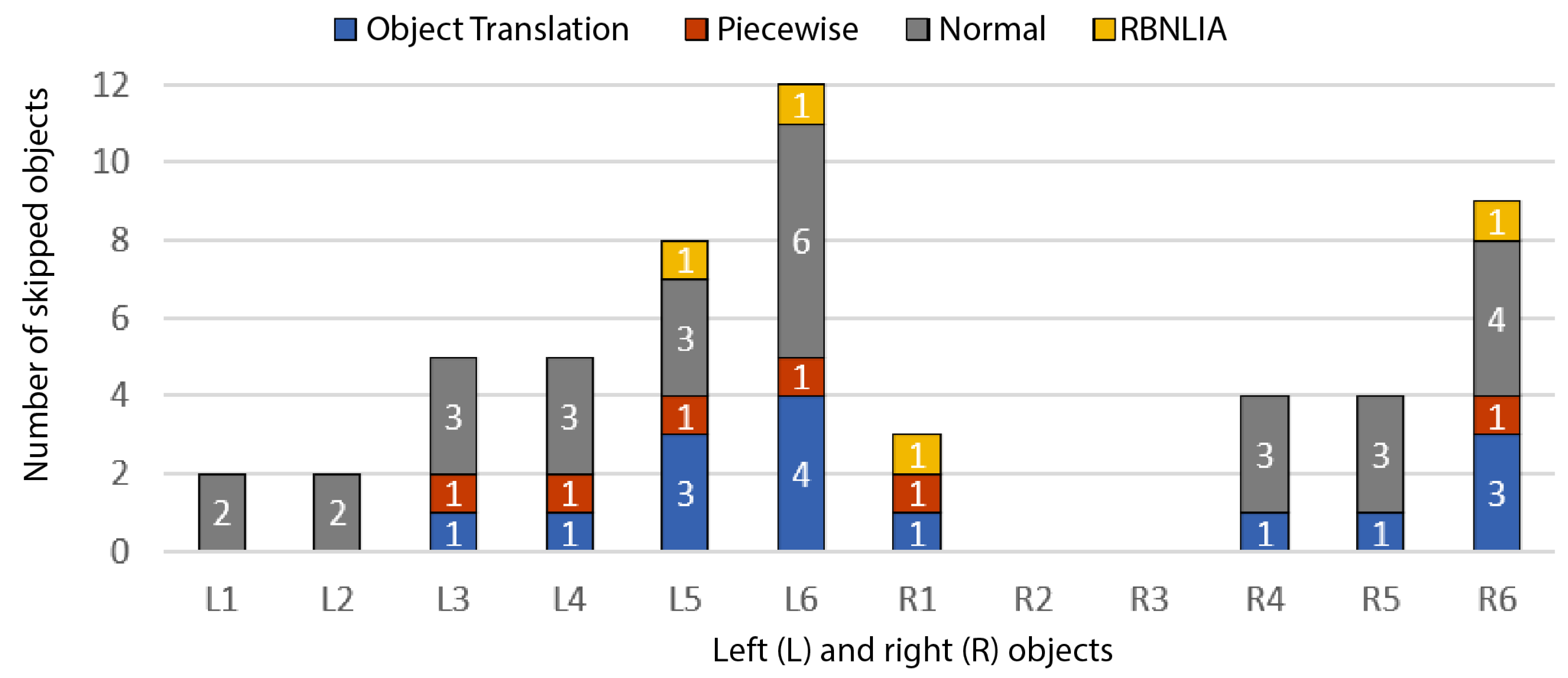
We hypothesize that Piecewise, a 3DMT in which the user is given an extended reach interaction customized to their upper-limb ergonomics to reposition the virtual hand in VR in comparison to normal (physical reach), object translation, and RBNLIA, will: (i) enable the execution of pick and place tasks in less time than other 3DMTs, (ii) reduce upper-body lean in comparison to the other 3DMTs, (iii) reduce the number of objects skipped in comparison to the other 3DMTs, (iv) maintain the percentage of reach within the comfort range of motion relative to other 3DMTs, and (v) provide a greater presence and immersion relative to other 3DMTs.
4. Conclusions
As VR continues to be adopted in non-entertainment scenarios such as education, training, and healthcare, users face usability difficulties due to a high user variability that hinders engagement, presence, and task execution. However, there have been advancements in providing VR customization in areas other than upper-limb ergonomics, such as setting the interpupillary distance, height calibration, adding tunneling vignettes for reducing motion sickness, and adjusting locomotion styles for ease of navigation. Therefore, it is essential to comprehend how upper-limb ergonomics influence presence, engagement, and task execution when integrated into a 3D manipulation technique.
This paper presented the development of a customized upper-limb 3DMT called Piecewise and compared it to existing isomorphic interactions, including normal and object translation (distance grab) modes, as well as RBNLIA, a non-isomorphic 3DMT for picking and placing objects set at various distances in front of the participants using both hands. Our research determined that the two 3DMTs that accounted for upper-limb ergonomics resulted in a greater presence and engagement, indicating that non-isomorphic techniques were more engaging than their isomorphic counterparts when immersing participants in the virtual environment. Despite having a greater number of omitted objects, isomorphic 3DMTs required less time to complete tasks than non-isomorphic modes according to our research. As a consequence of the number of skipped objects, non-isomorphic interactions permitted greater task completion with fewer skipped objects.
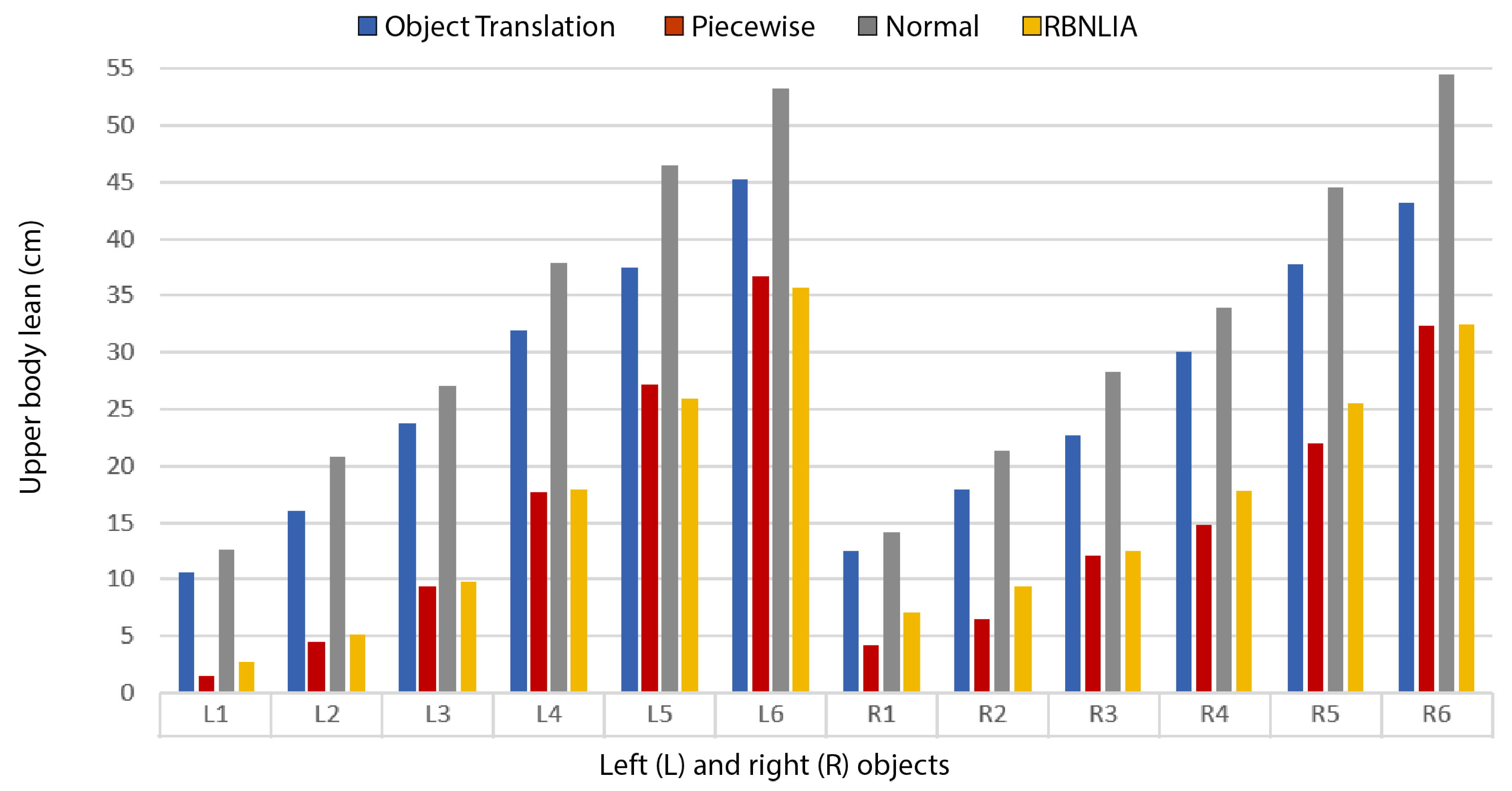
Following the analysis of the percentage of reach, both isomorphic and non-isomorphic 3DMTs produced comparable results. However, it is important to note that the participants had greater reach when using the Piecewise and RBNLIA modes for objects on the left side of the virtual table, and greater reach when using the normal, object translation, and RBNLIA modes for objects on the right side of the virtual table. Although the 3DMTs had no effect on the percentage of reach, the results of the upper-body lean revealed that the normal and object translation 3DMTs had a higher percentage than Piecewise and RBNLIA.
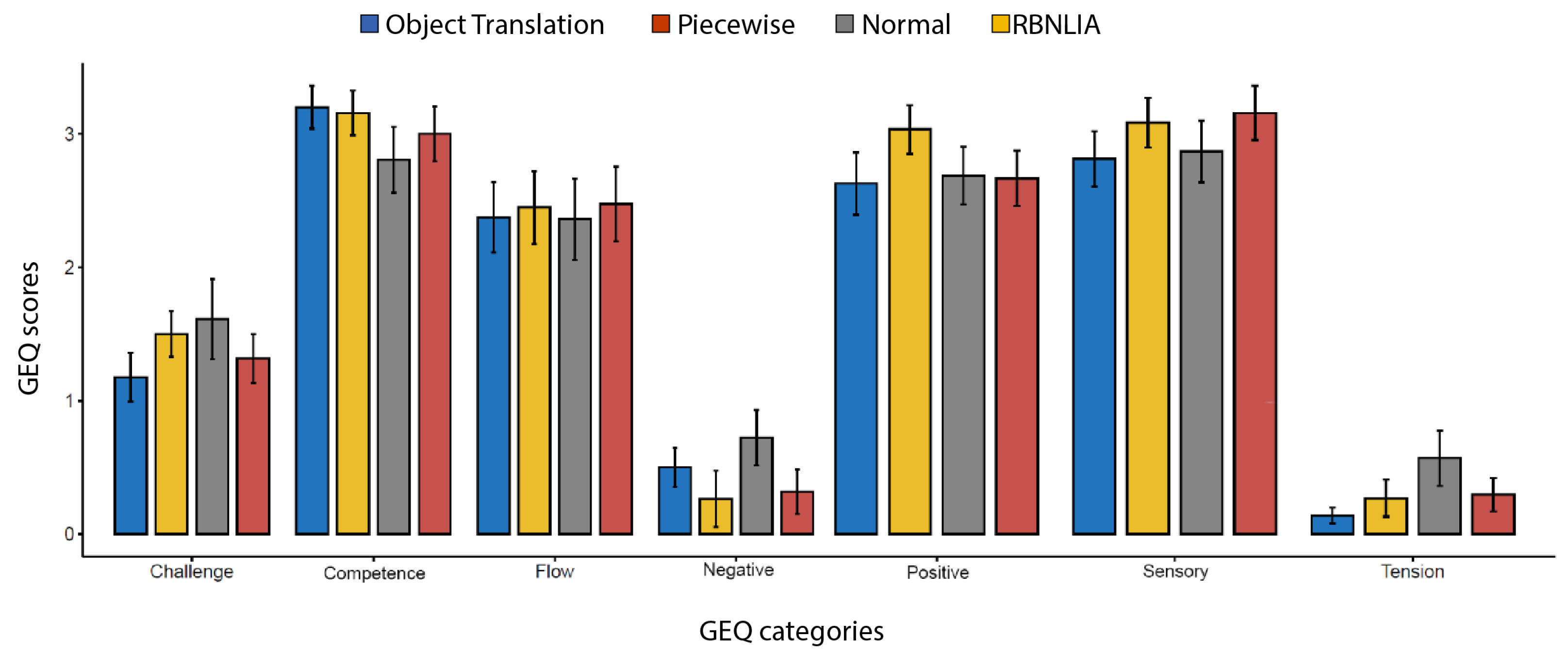
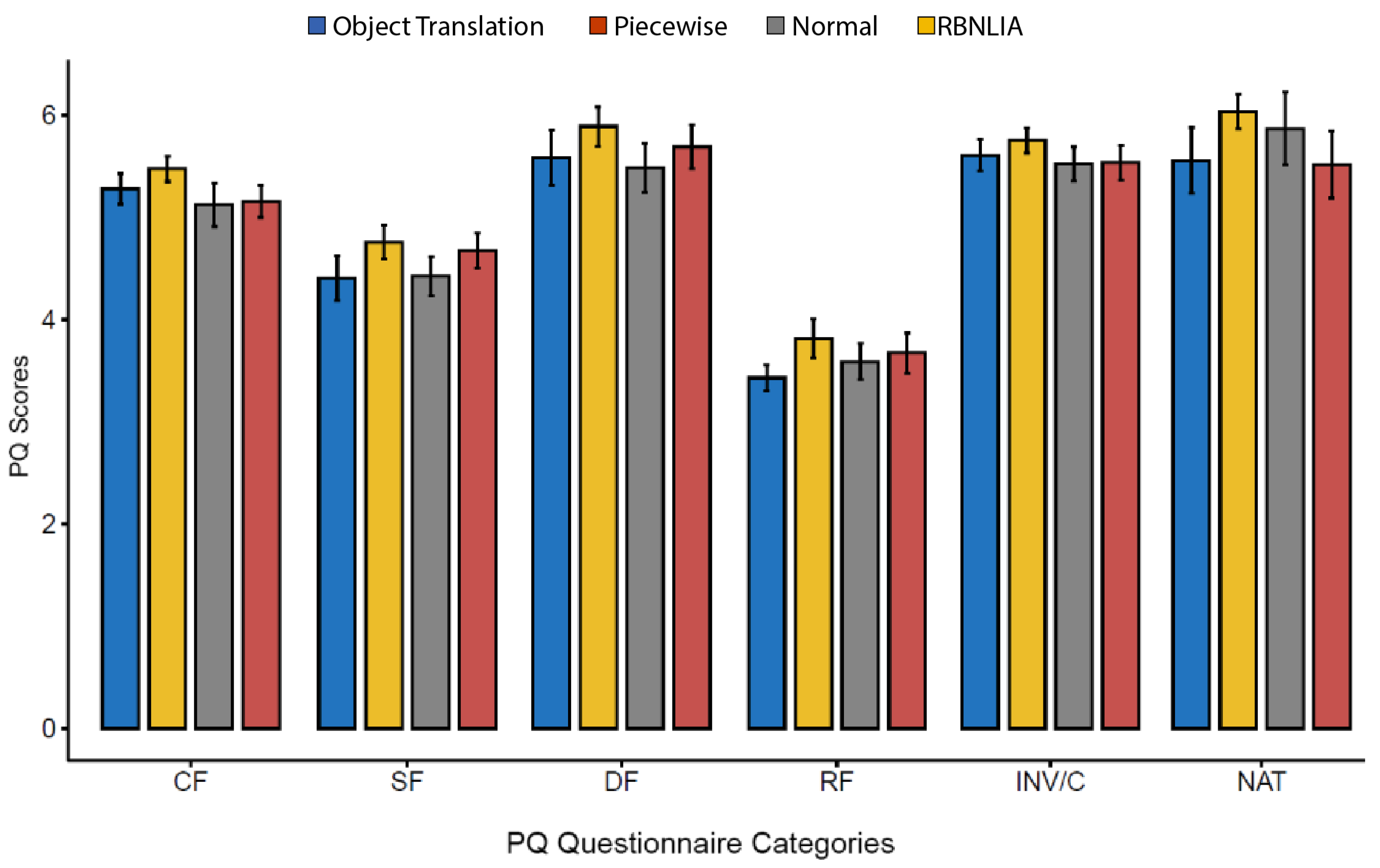
Our analysis of presence, engagement, time to completion, percentage of reach, and upper-body lean, as well as participant preferences, suggests that incorporating upper-limb ergonomics into a 3DMT has an effect on the performance of the task. Specifically, when compared to RBNLIA, our proposed Piecewise 3DMT ranked second in terms of preference, had the longest time to completion, the least amount of upper-body lean, the second highest rating in presence, and the most positive scores for flow, sensory, and imaginative immersion, while ranking behind RBNLIA’s negative and positive affect. In terms of difficulty, tension, and proficiency, normal and object translation modes outperformed both non-isomorphic 3DMTs.
This paper contributes to 3DMTs by presenting the effects of factoring upper-limb ergonomics toward ensuring arm motion within the comfort zone when reaching and grasping objects in VR compared to a non-isomorphic (i.e., RBNLIA) and two isomorphic 3DMT models (i.e., normal and object translation). Our findings align with previous research on 3DMTs, further corroborating the importance of motion within ergonomics comfort. Furthermore, our results show how maintaining upper-limb movement with an ergonomic comfort range of motion can impact body posture and presence. Such findings are essential for advancing 3DMTs that can be used for accessible and inclusive immersive experiences. As VR becomes more widely adopted, eliminating one-size-fits-all barriers to immersive technologies is pertinent. Customizations tailored to each user will aid in performing duties and the experience of a greater presence and engagement.
Future Work
Future research will investigate the optimal combination of isomorphic and non-isomorphic 3DMTs for maximizing immersion, presence, and task success. Due to the cross-applications of 3DMT, additional use cases will be investigated in fields such as medicine, engineering, and inclusive design in order to study the effects on psychomotor skills development. Additional qualitative data will be collected from participants to better comprehend their perceptions of the provided amplification at various upper-limb flexion and extension ranges. Lastly, a larger study will be conducted to increase statistical power.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}