
Flight Test of Autonomous Formation Management for Multiple Fixed-Wing UAVs Based on Missile Parallel Method

 , ,
, ,  ,
,
Abstract
:1. Introduction
2. Design of Guidance Law and Verification by Simulation
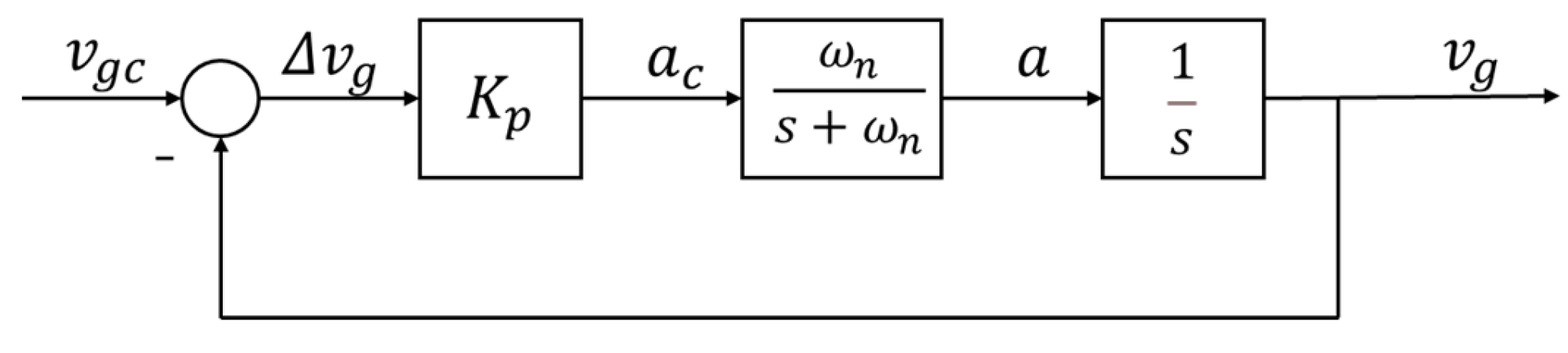
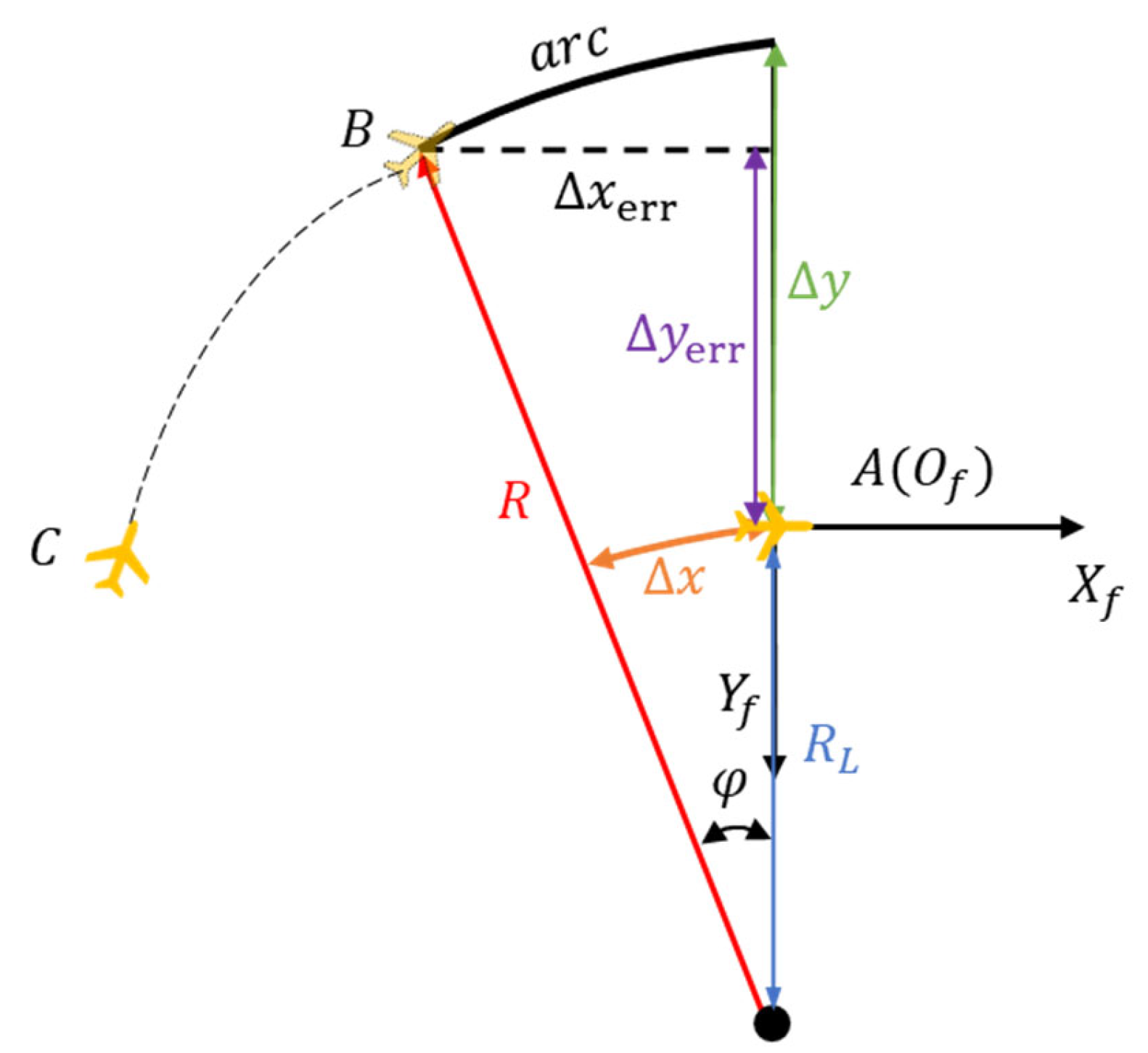
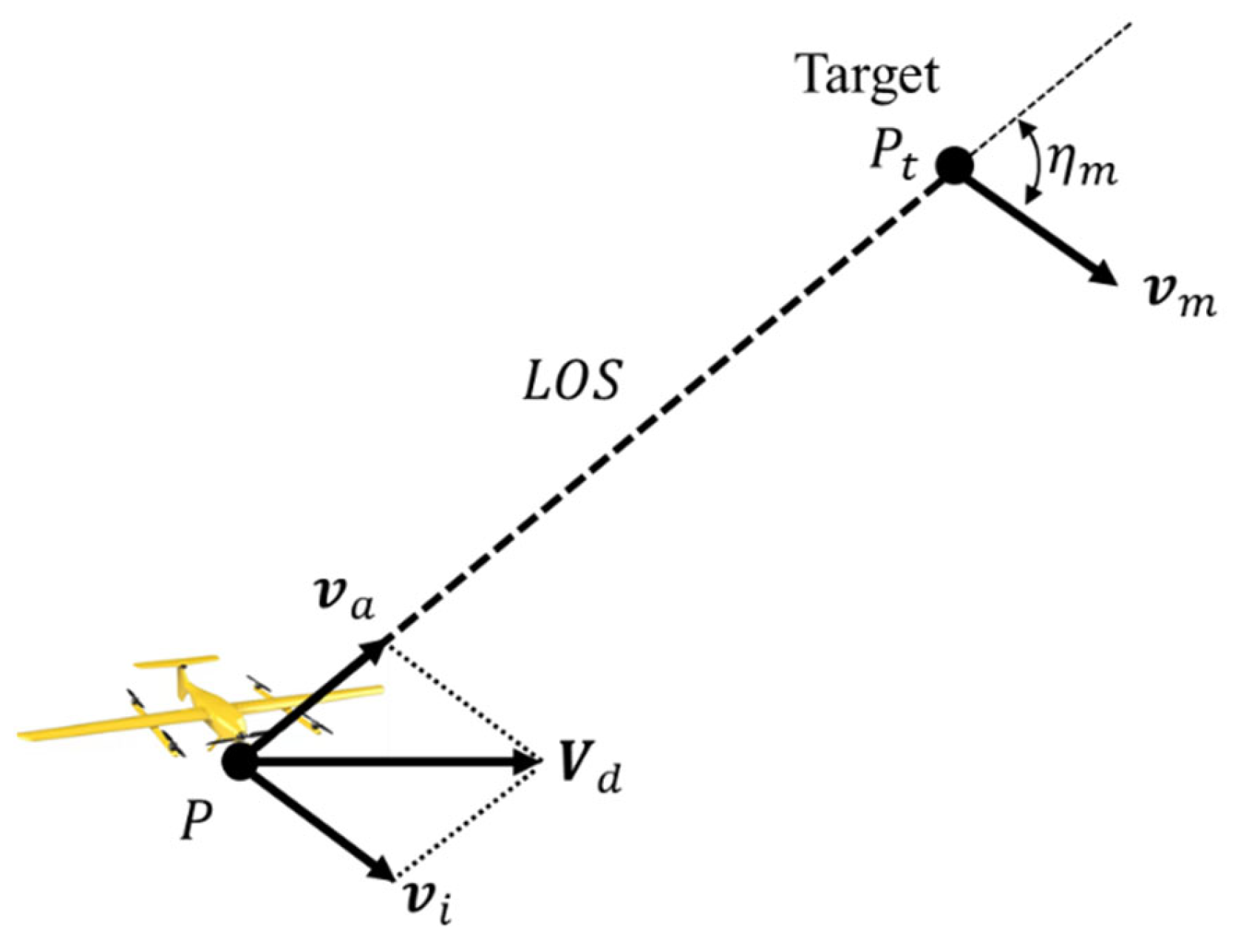
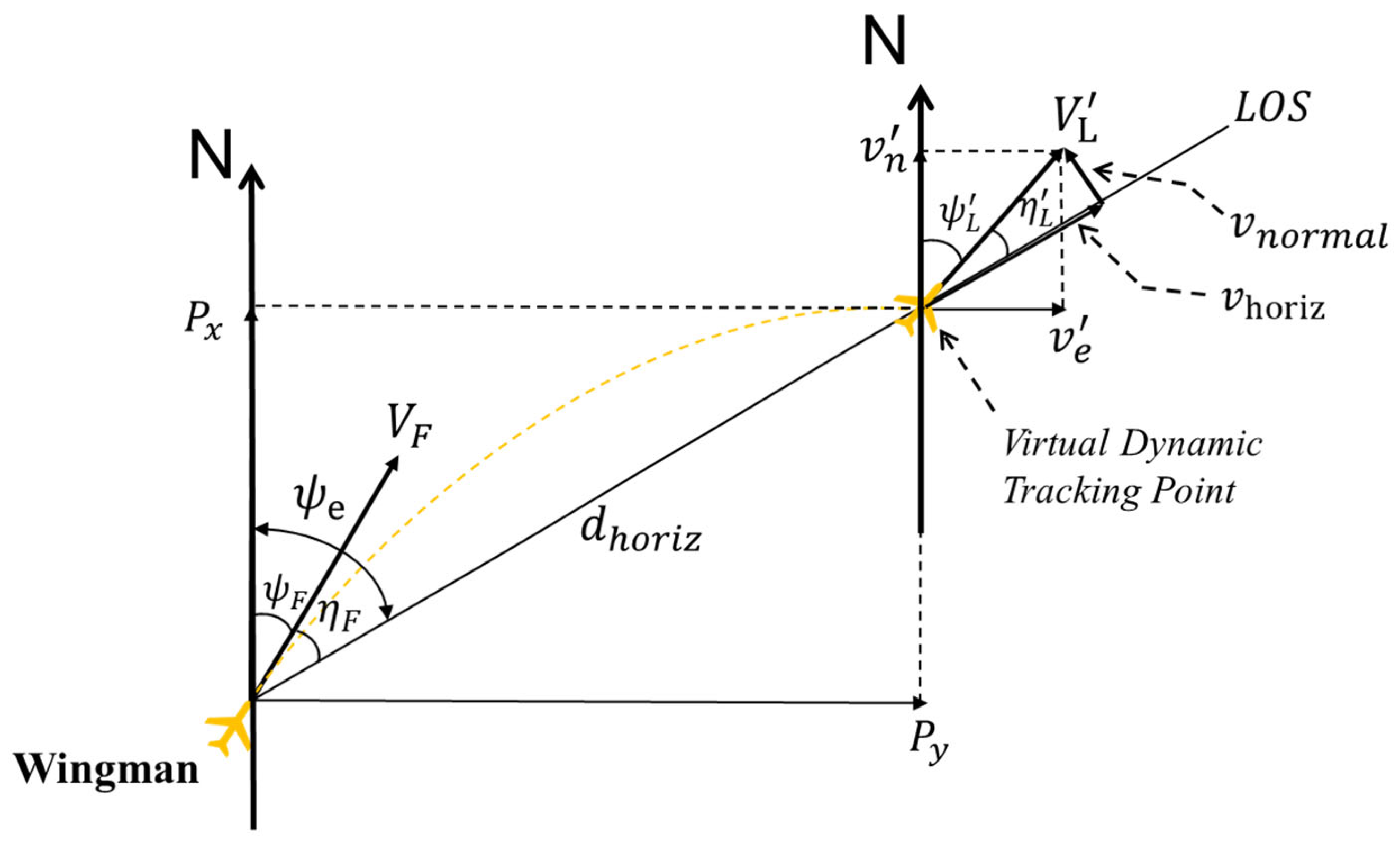
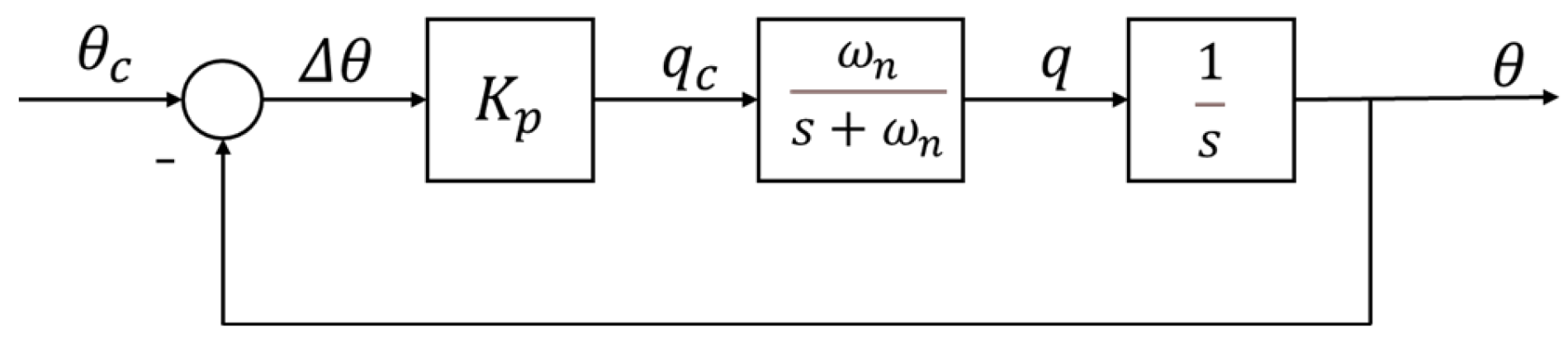
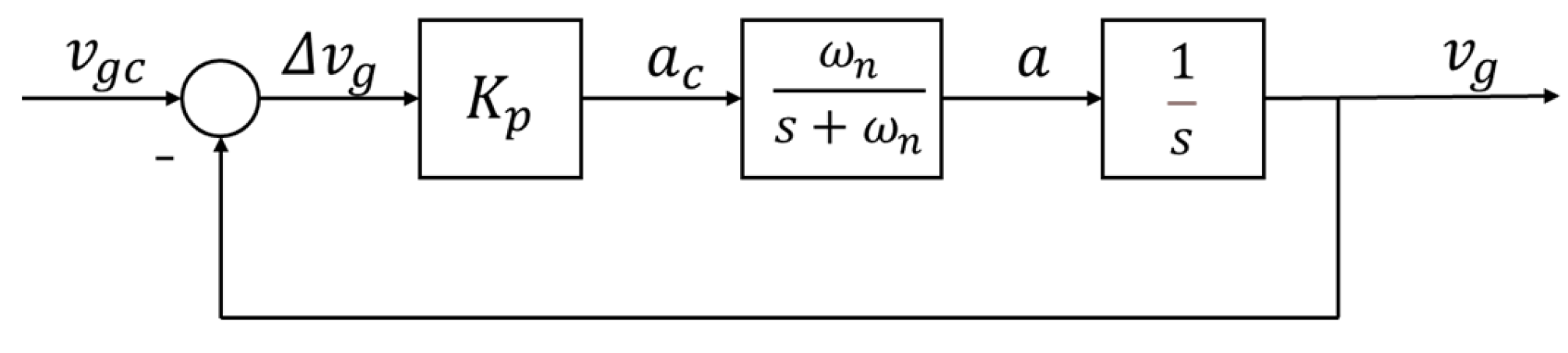
2.1. Design of Guidance Law
2.2. Simulation Verification of Guidance Law
2.2.1. Construction of Simulation Model
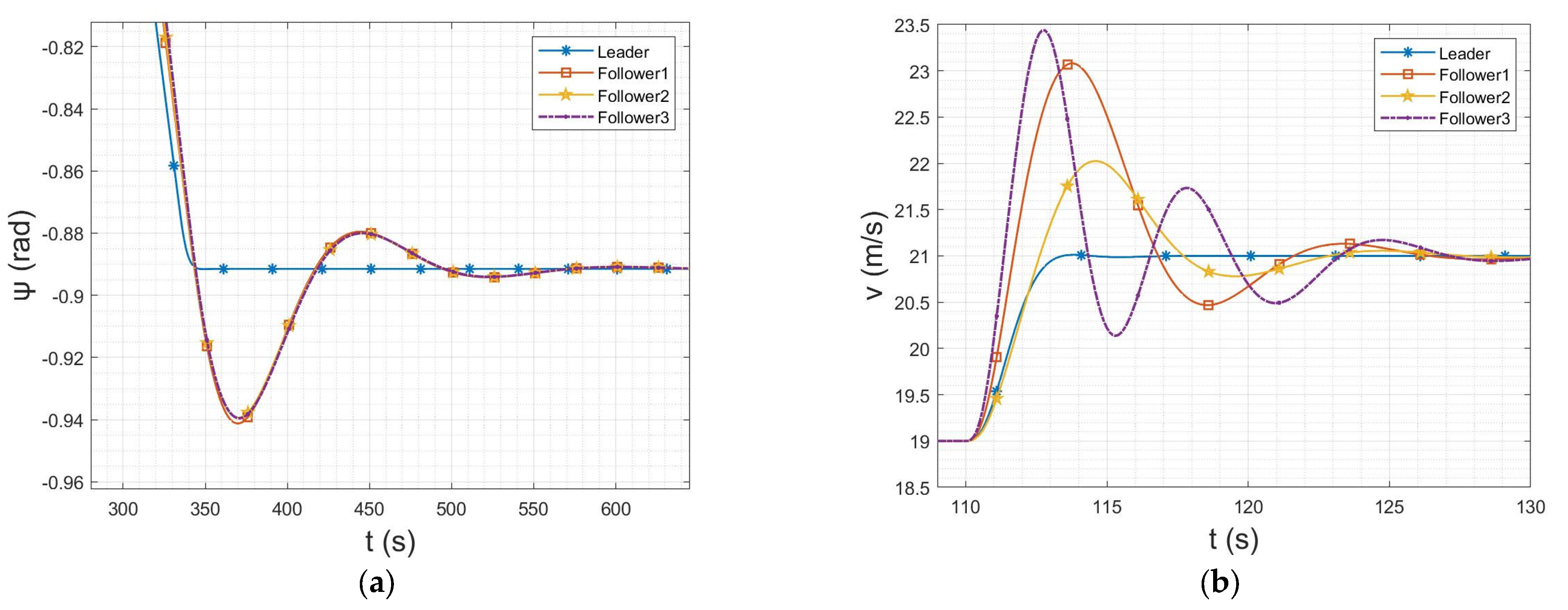
2.2.2. Results of Simulation of Guidance Law
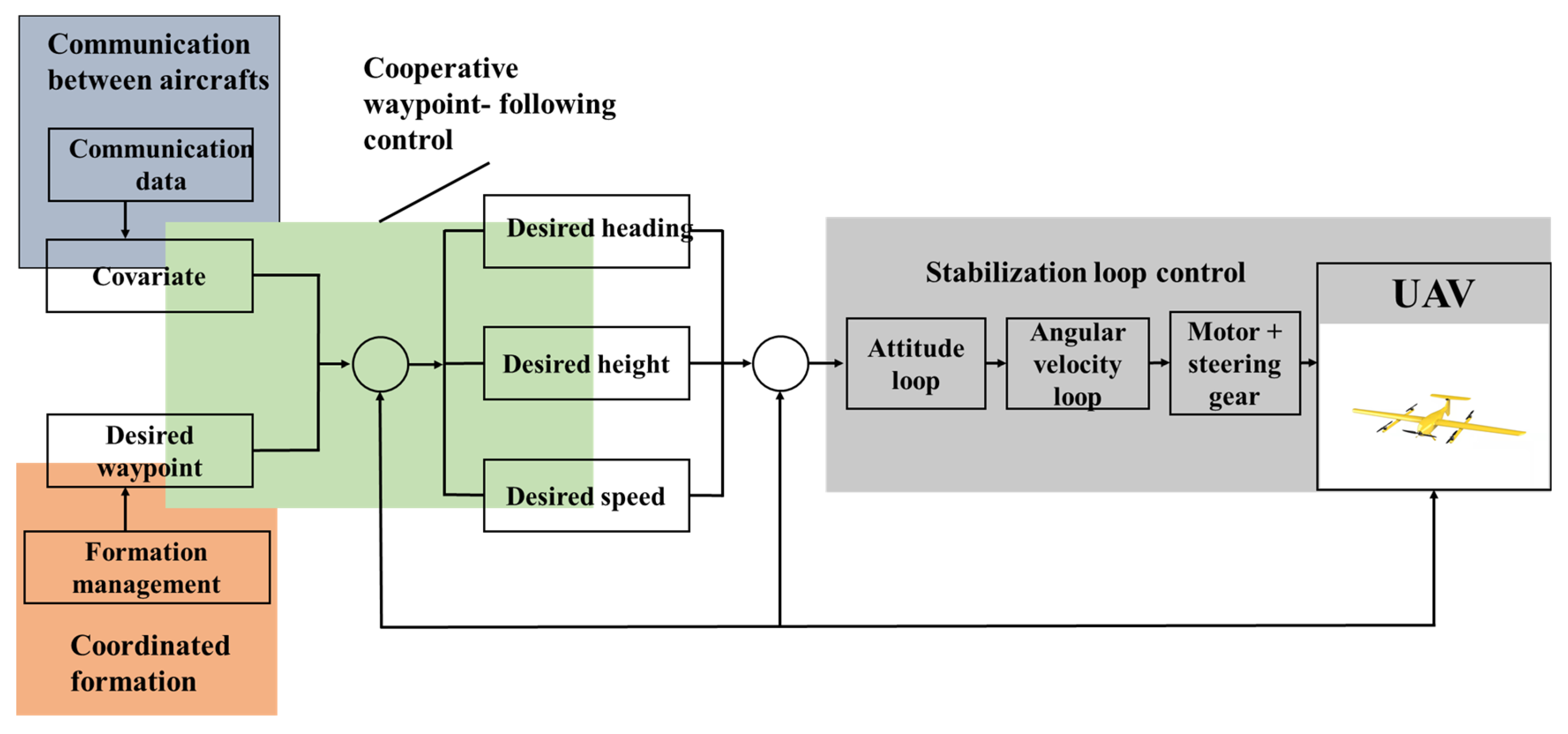
3. Formation Management and Control
3.1. Formation Keeping Based on Coordinated Waypoints
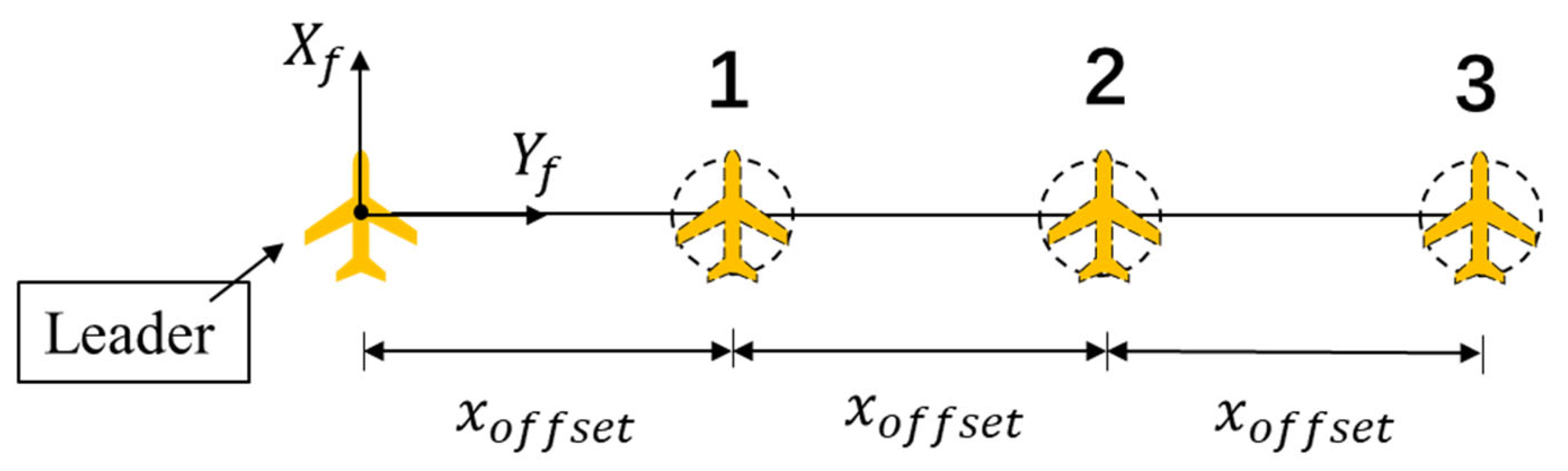
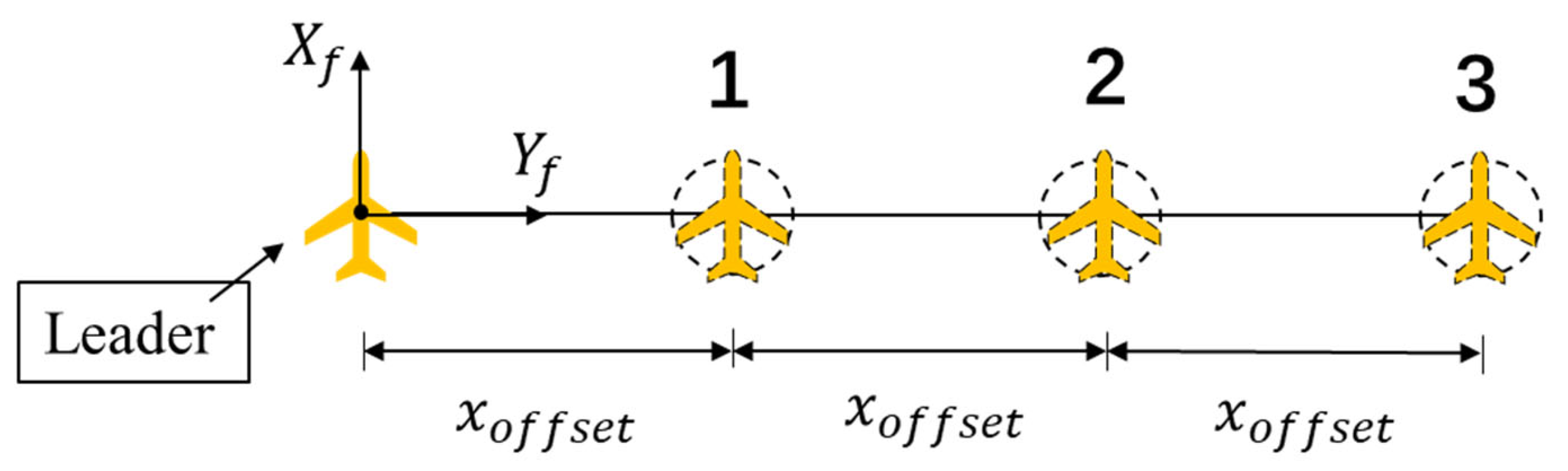
- Linear formation. In the formation coordinate system, the position coordinates of the lead aircraft are (0, 0), those of the first cooperative path point are (0, xoffset), and those of the other i cooperative path points are (0, xoffset × i). We then construct the list of cooperative waypoints for a straight-line formation. Figure 10 shows the relationship of coordinated waypoints in straight horizontal formation.
- 2.
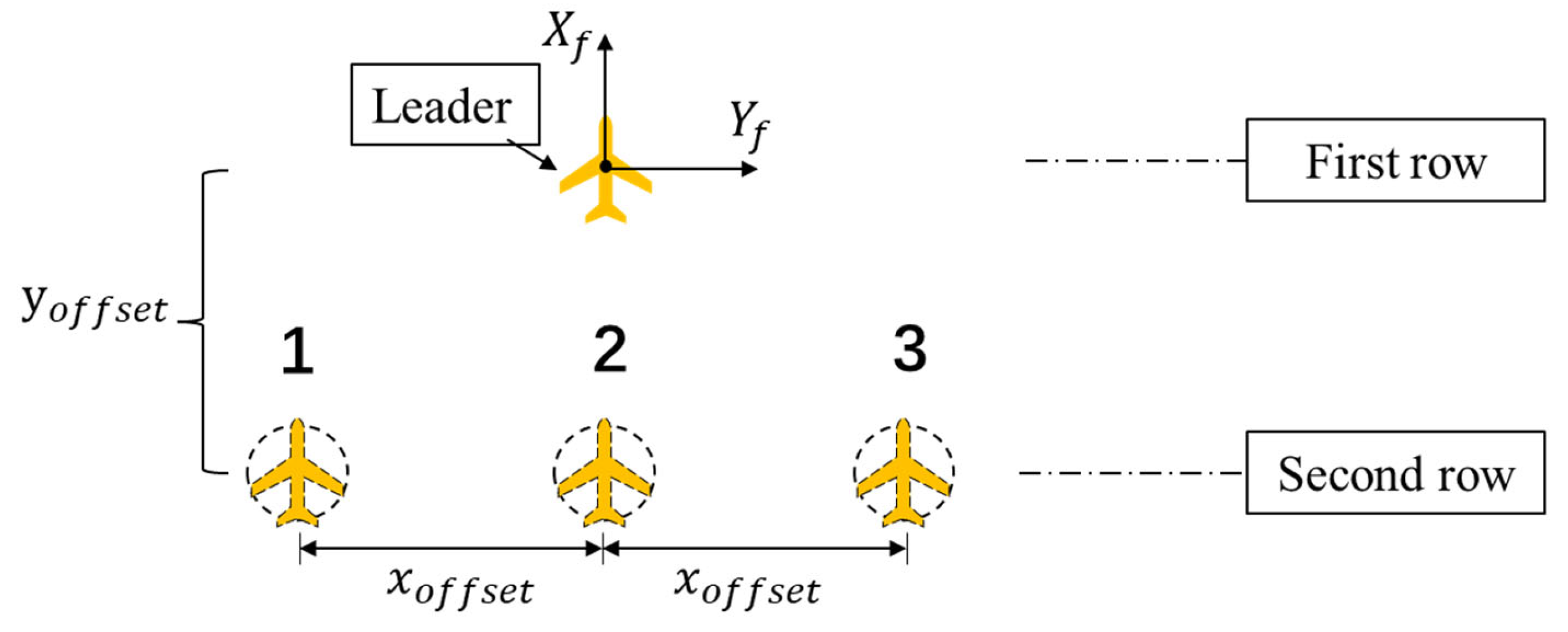
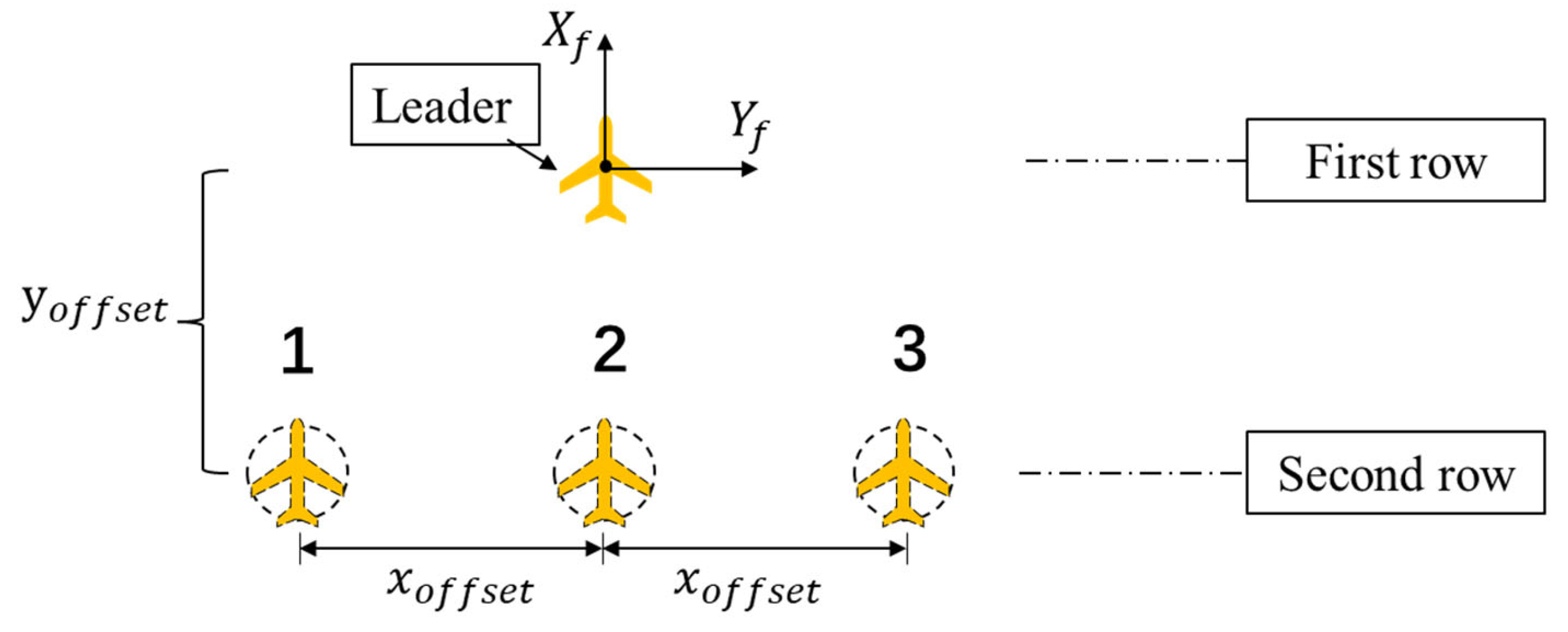
- Triangular formation. In the formation coordinate system, the position coordinates of the lead aircraft are (0, 0), and there are at most (2n−1) cooperative waypoints in n lines, i.e., one line has one cooperative waypoint, and two lines have three cooperative waypoints. The y-axis coordinate interval between every two rows of collaborative path points is yoffset, and the x-axis coordinate interval between every two columns of collaborative path points is xoffset. A list of cooperating waypoints for a triangular formation can be constructed from this. Figure 11 shows the relationships of cooperating waypoints in horizontal triangular formations.
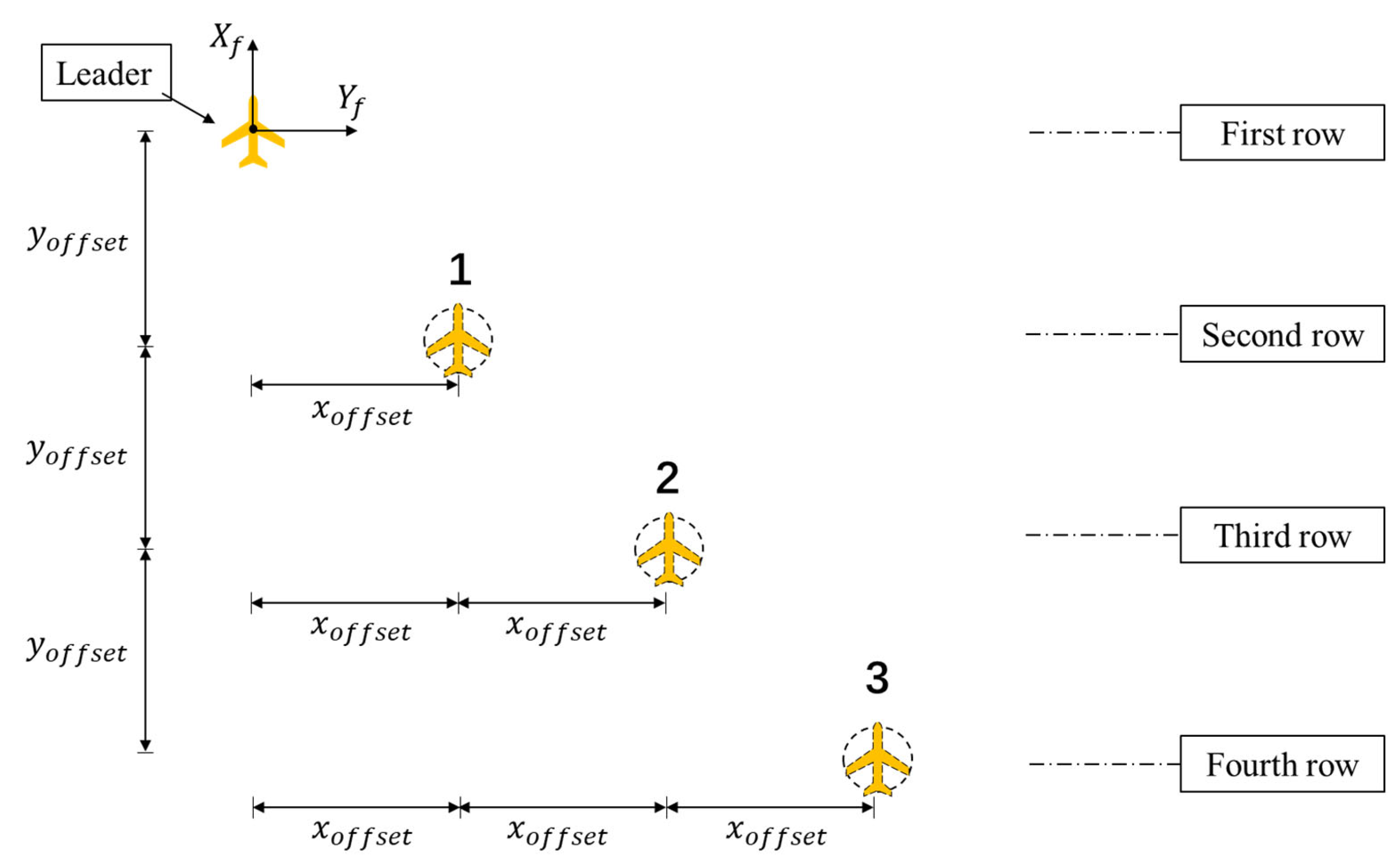
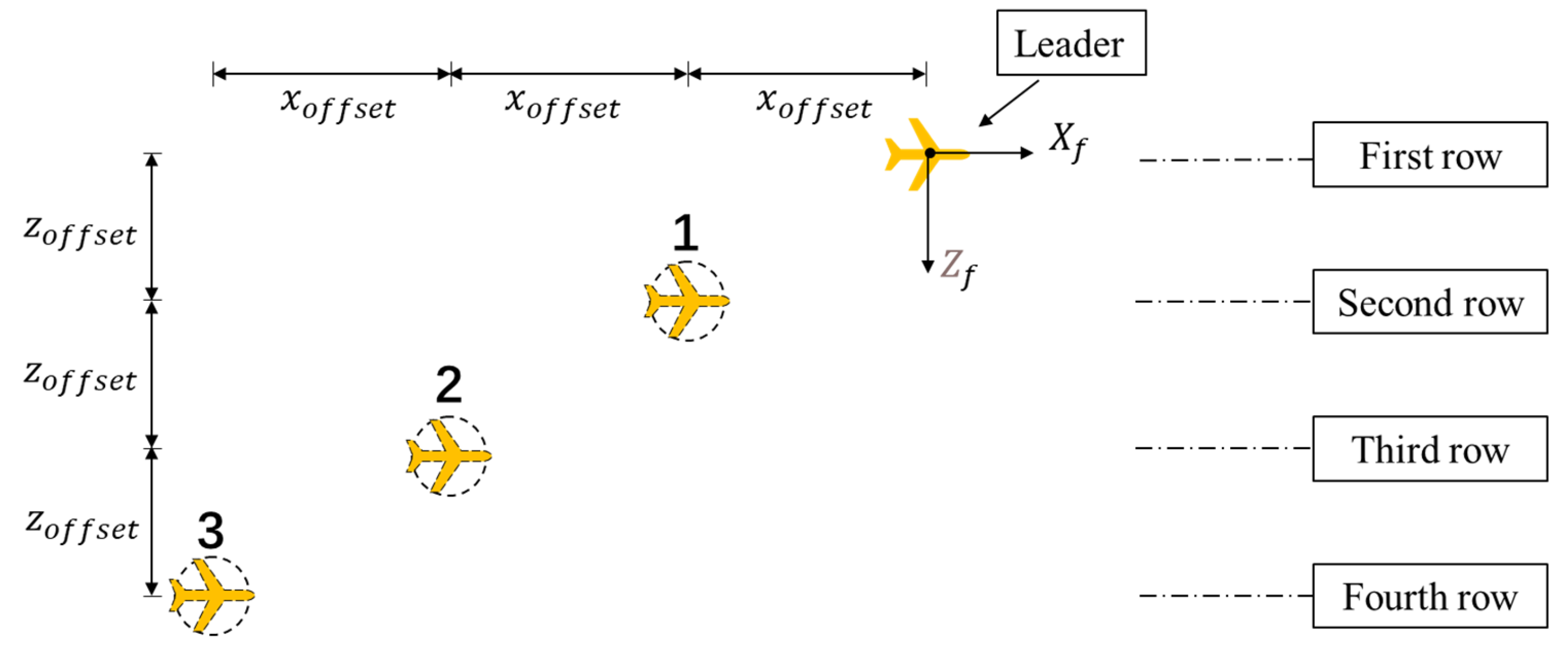
- 3.
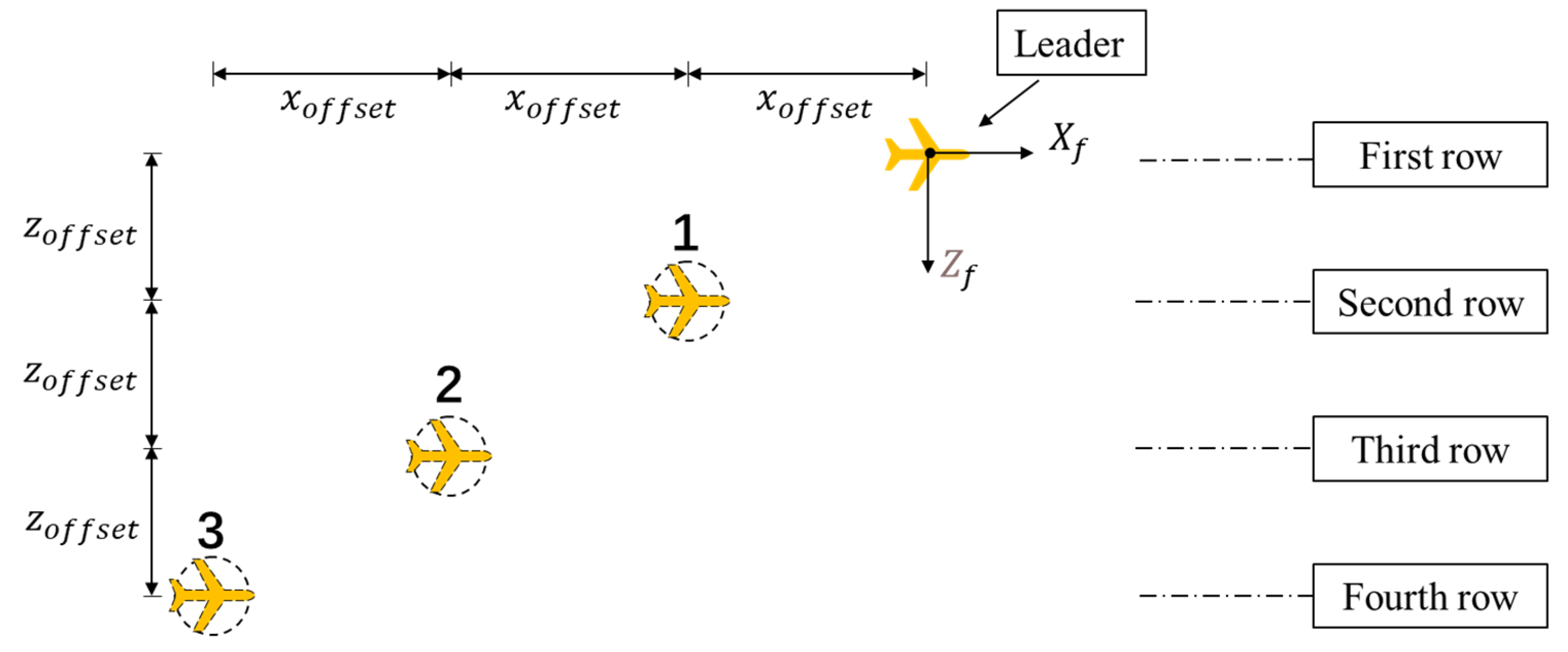
- Stepped formation. A stepped formation is 3D, and in the formation coordinate system, the position coordinates of the leader are (0, 0) and each line has only one collaborative path point. As shown in the plan view of the stepped formation in Figure 12, the y-axis coordinate interval between every two rows of cooperative waypoints in the horizontal direction is yoffset, and the x-axis coordinate interval between every two columns of cooperative waypoints is xoffset. The side view of the stepped formation in Figure 13 shows that in the vertical direction, the z-axis coordinate interval between every two rows of cooperative path points is zoffset, and the z-axis coordinate interval between every two columns of cooperative path points is xoffset. A list of cooperating waypoints for the stepped formation can be constructed from this.
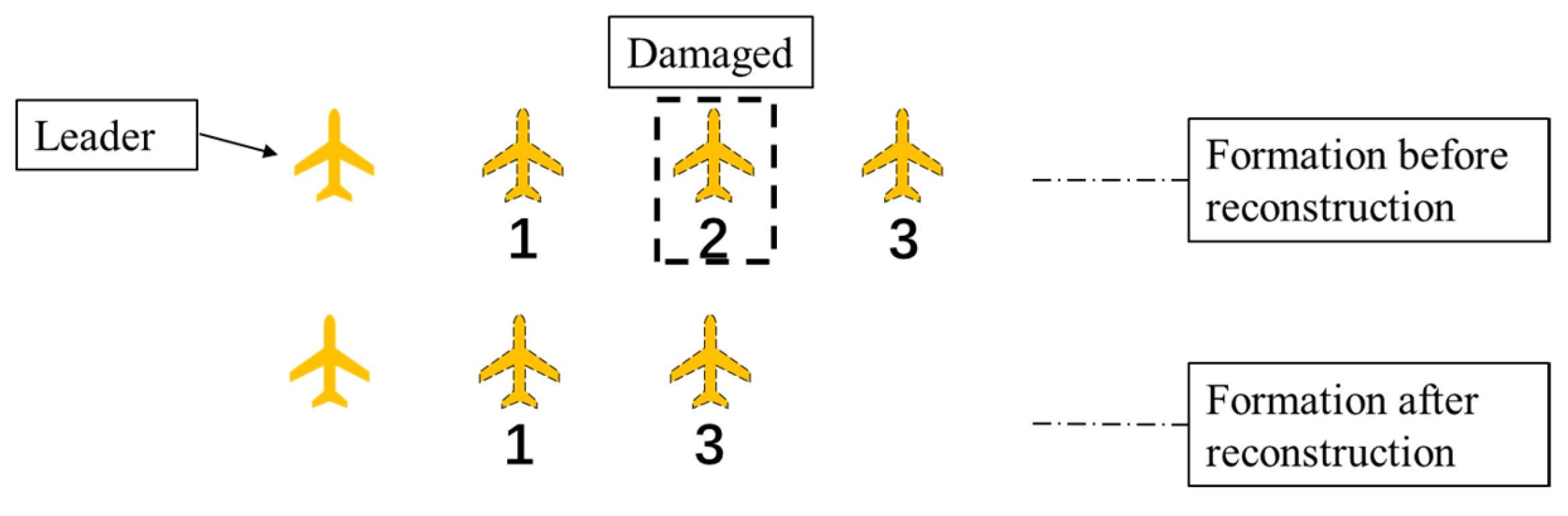
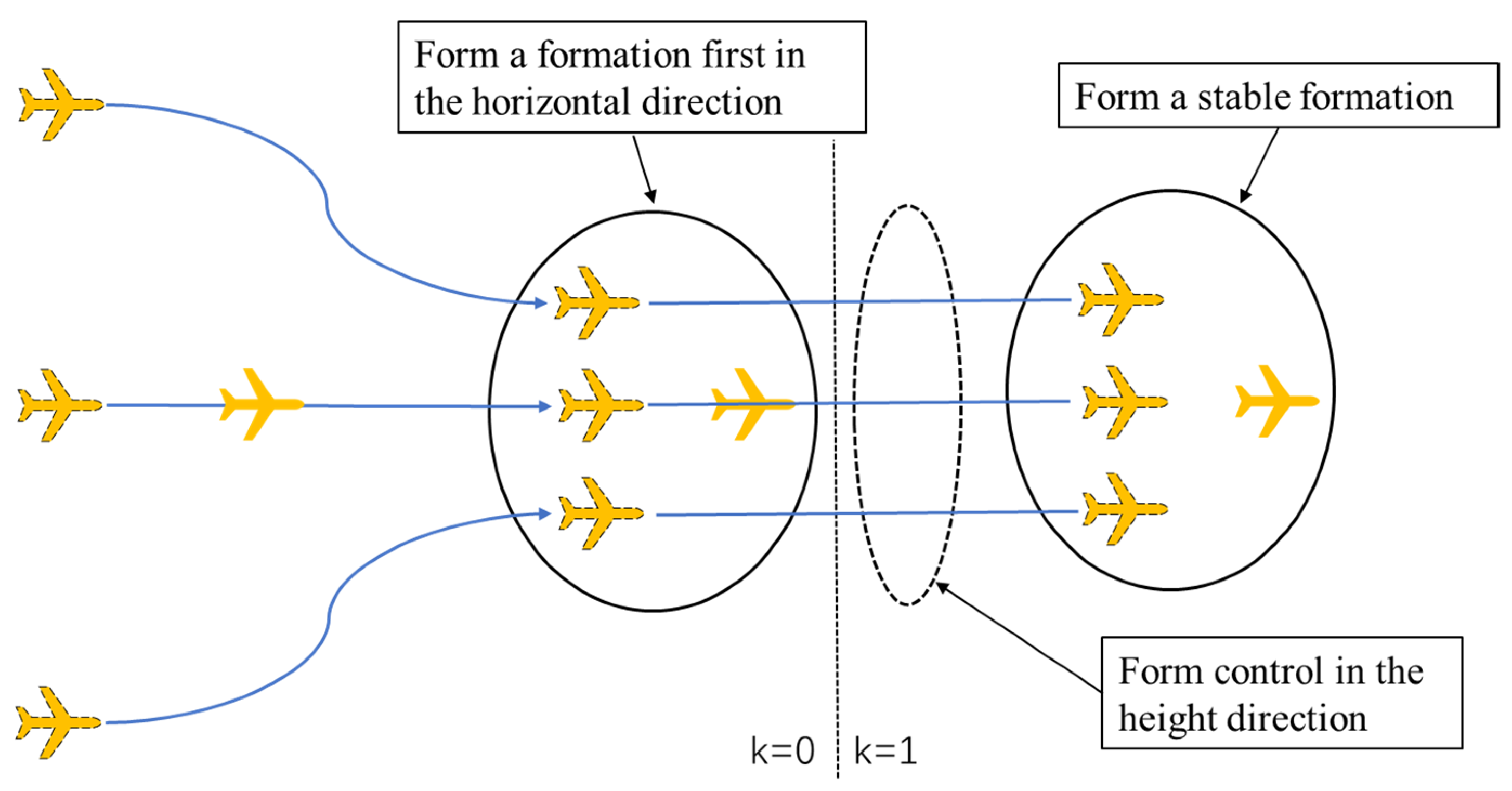
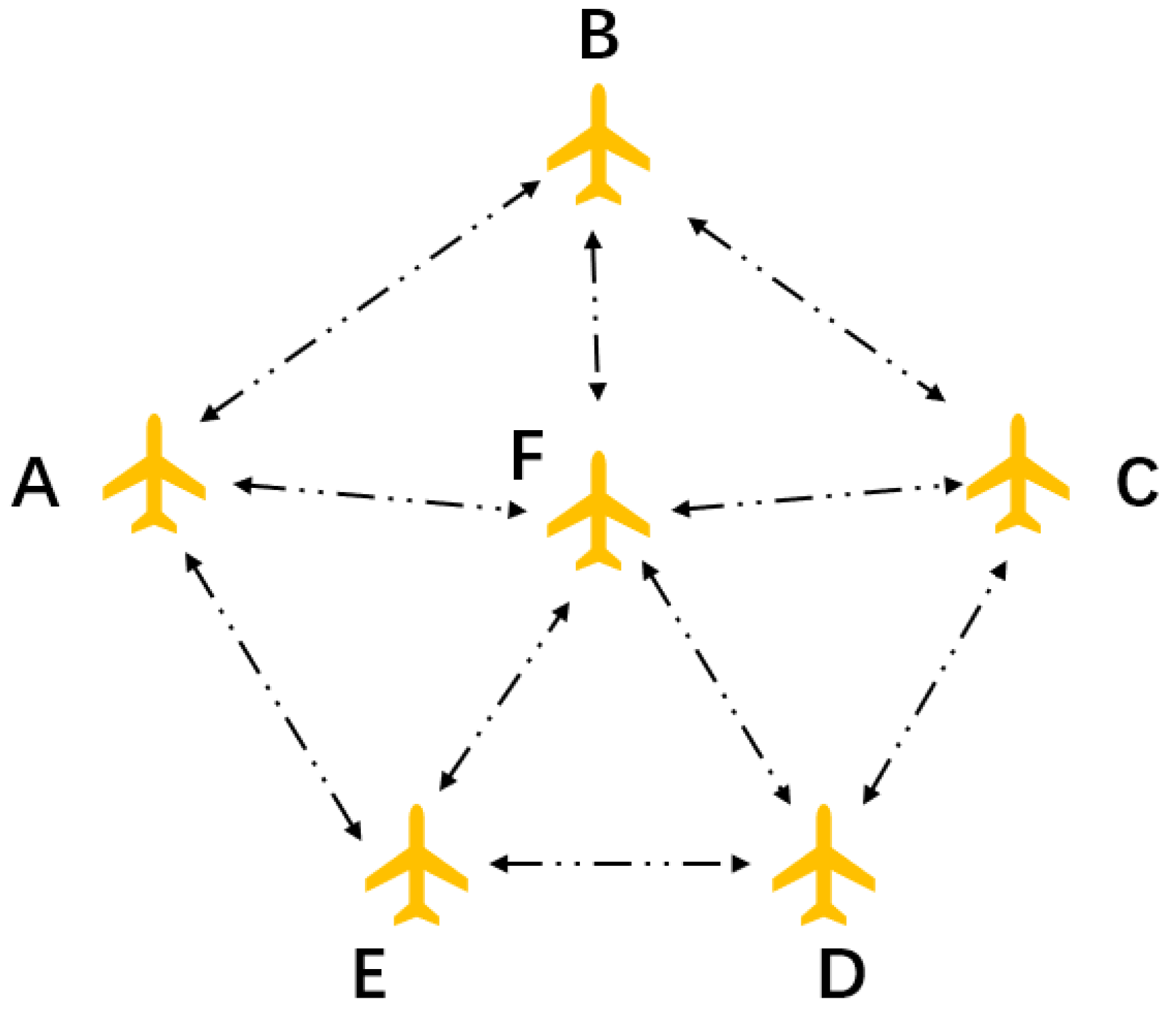
3.2. Research on Formation Transformation Method of Cooperative Formation
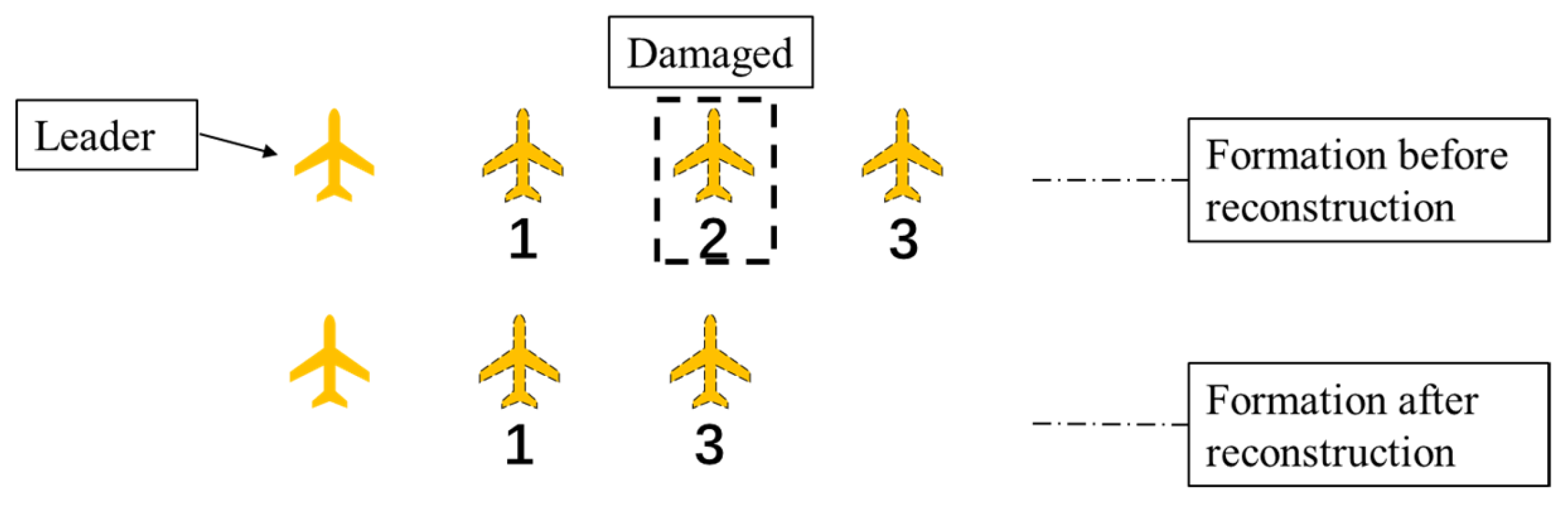
4. Formation Reconfiguration Strategy
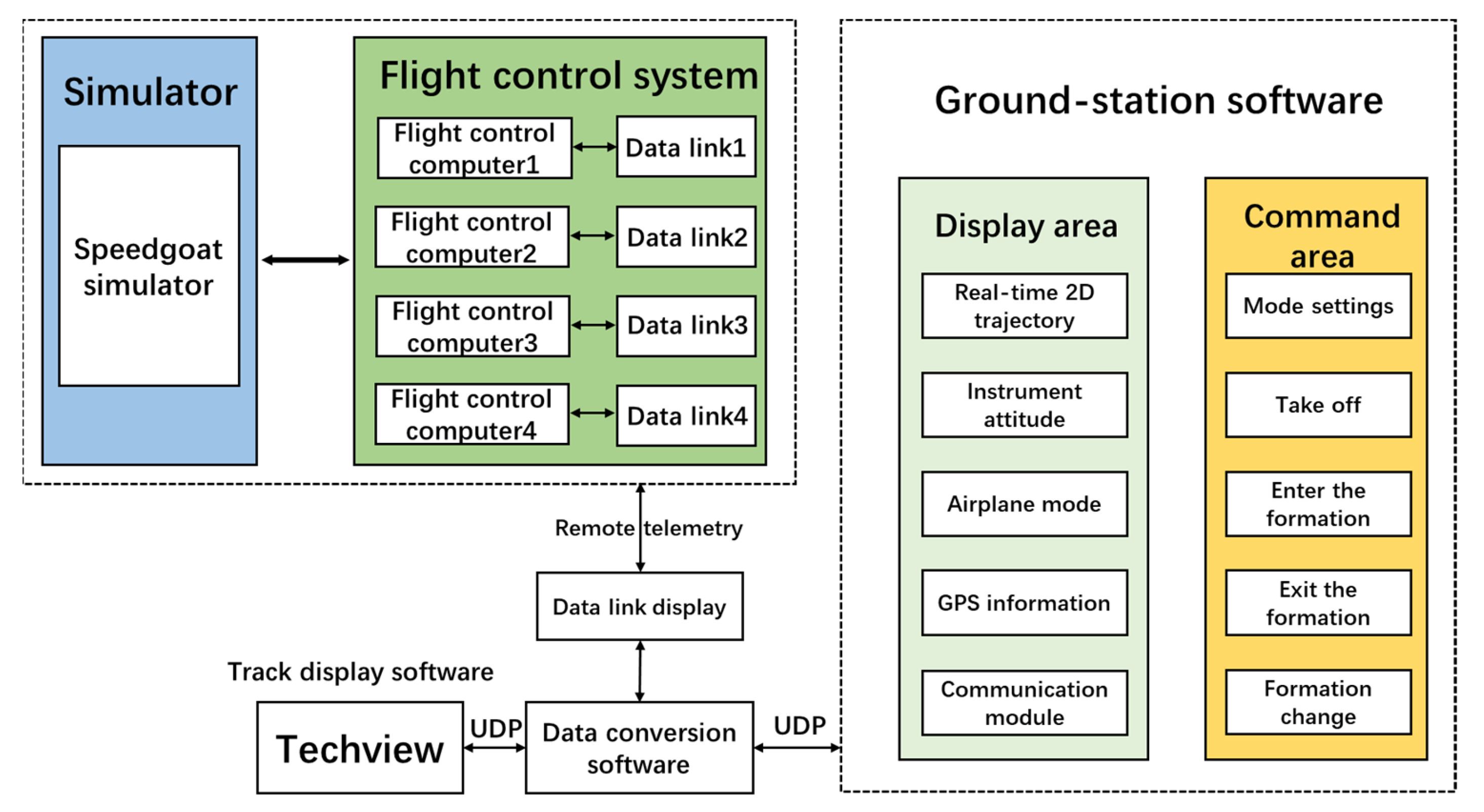
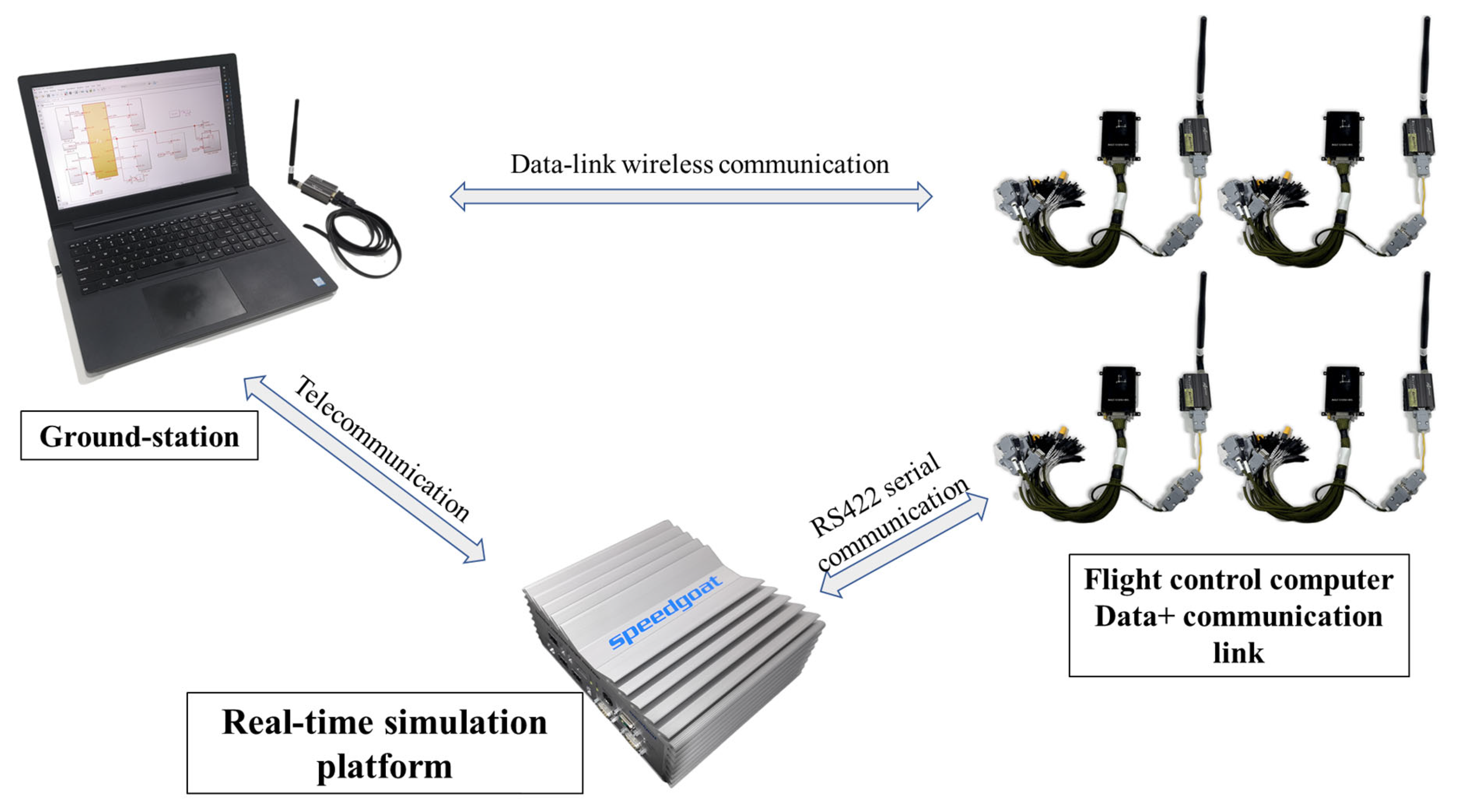
5. Hardware-In-The-Loop Simulation
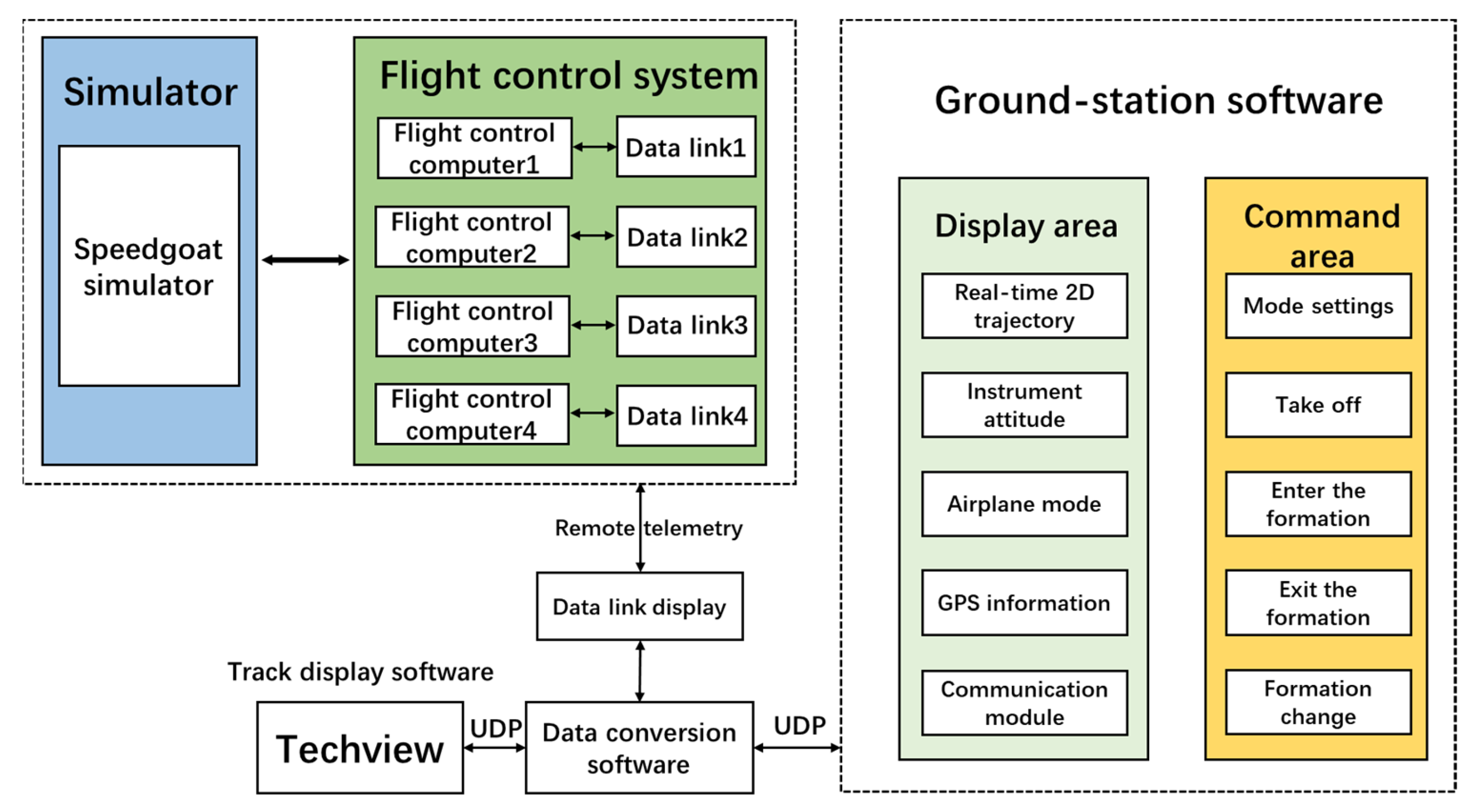
5.1. System Composition
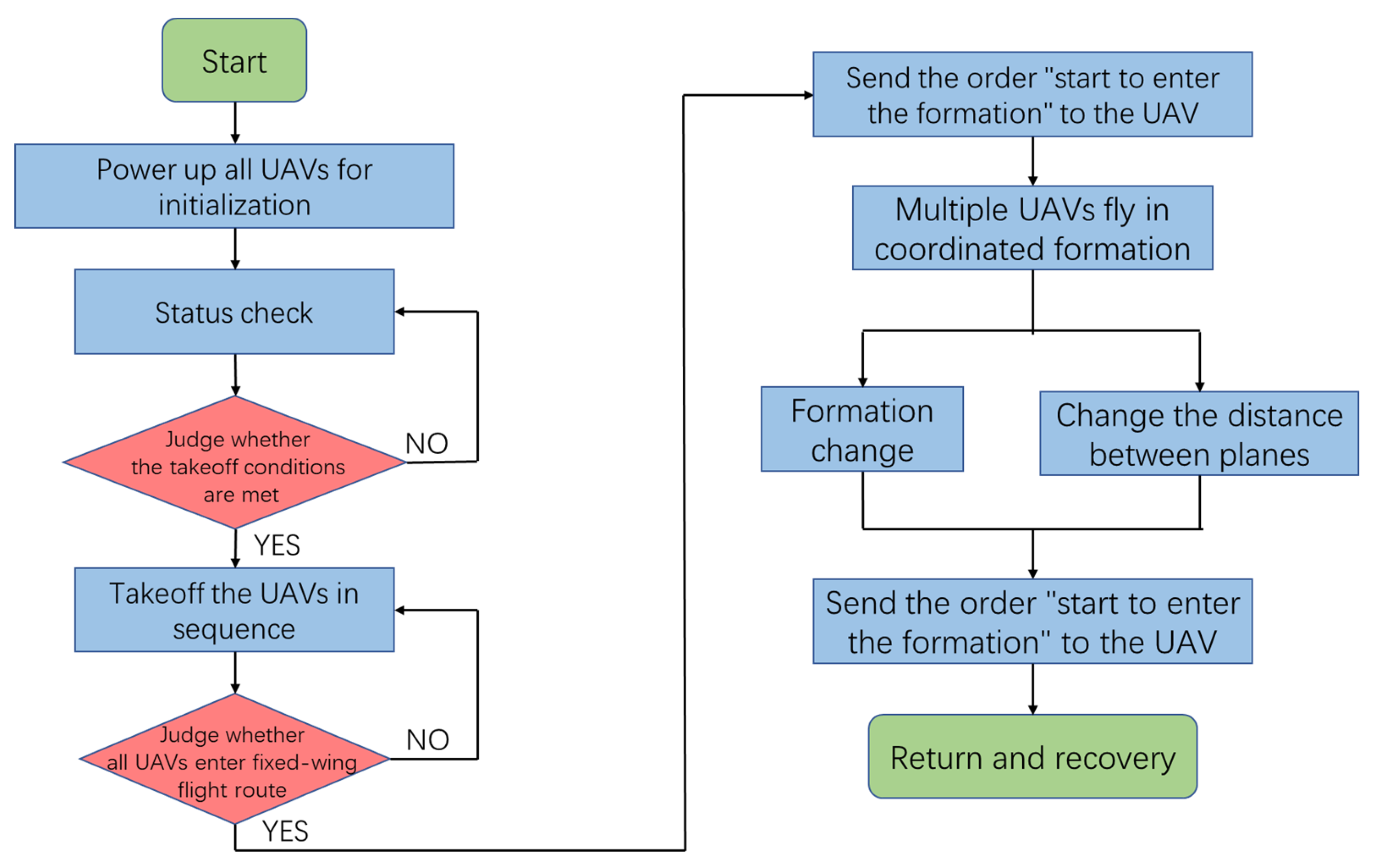
5.2. Semiphysical Simulation Process
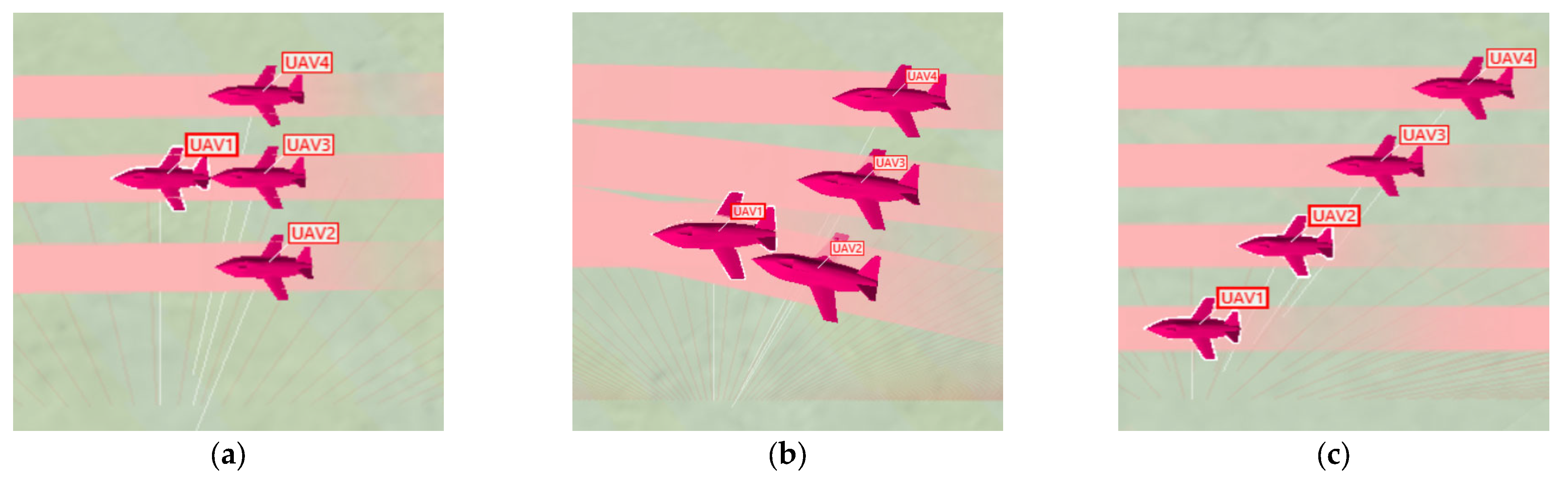
- Case 1: Simulation of formation-mode flight
- Case 2: Simulation of formation change
6. Actual Flight Verification
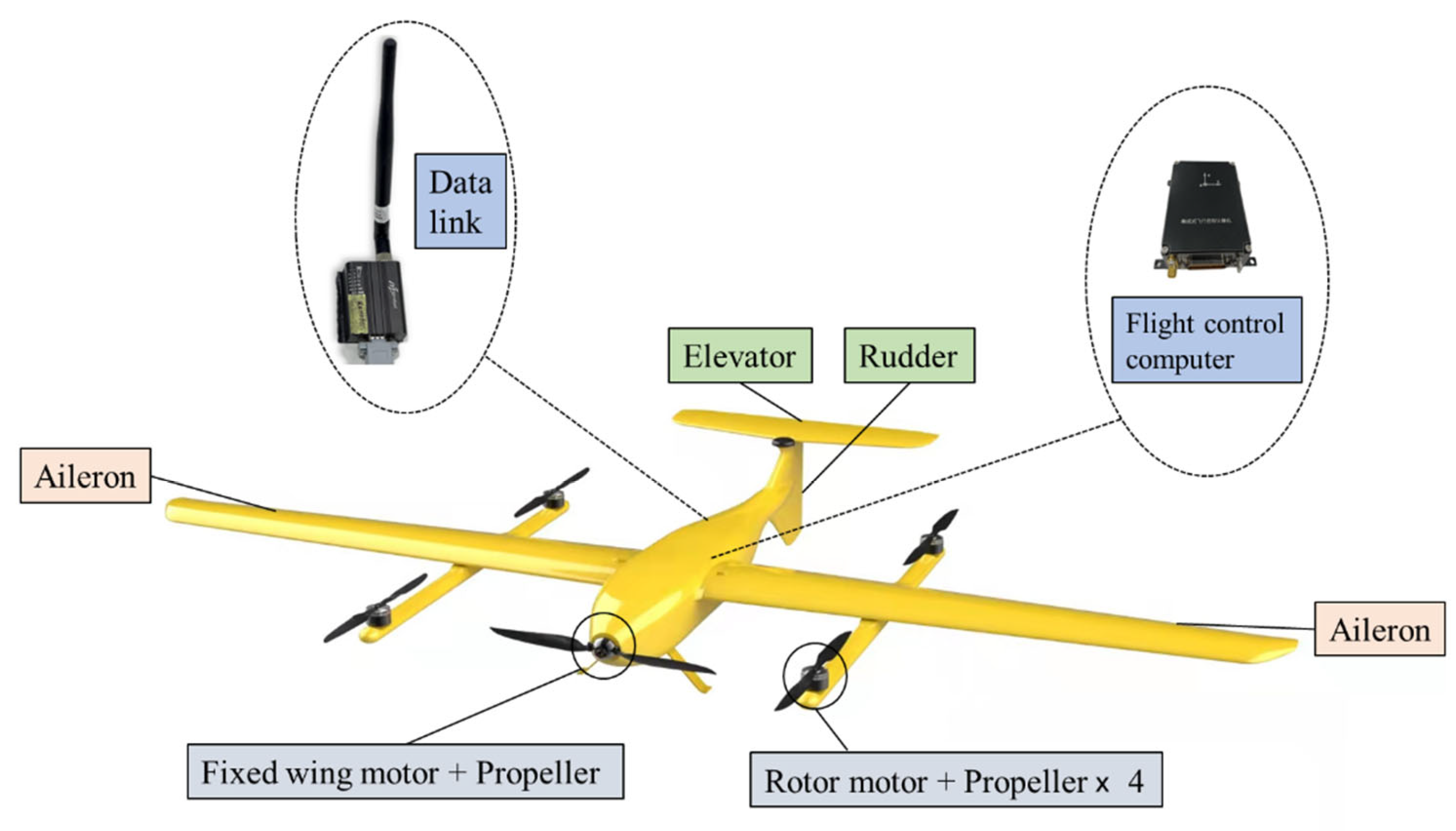
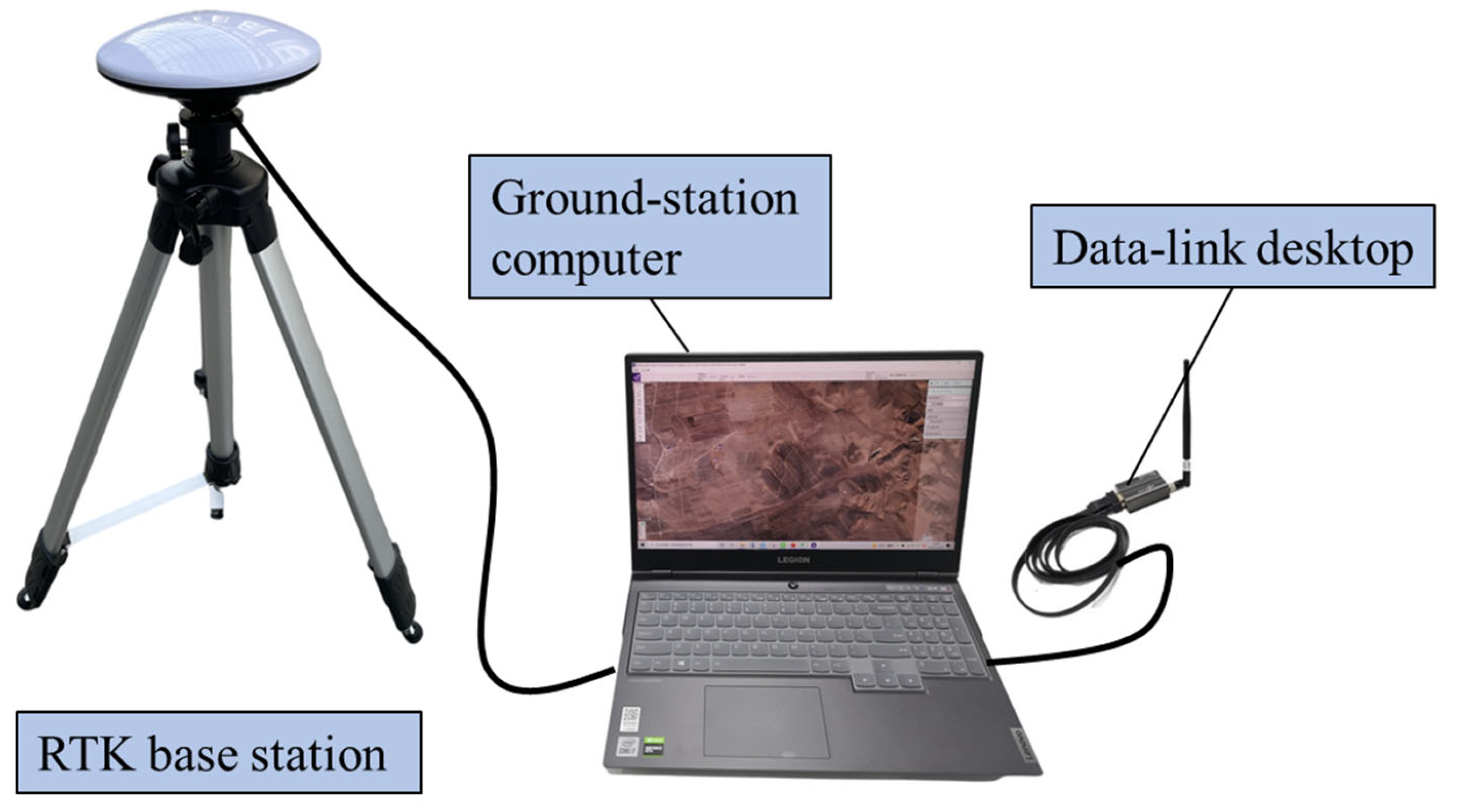
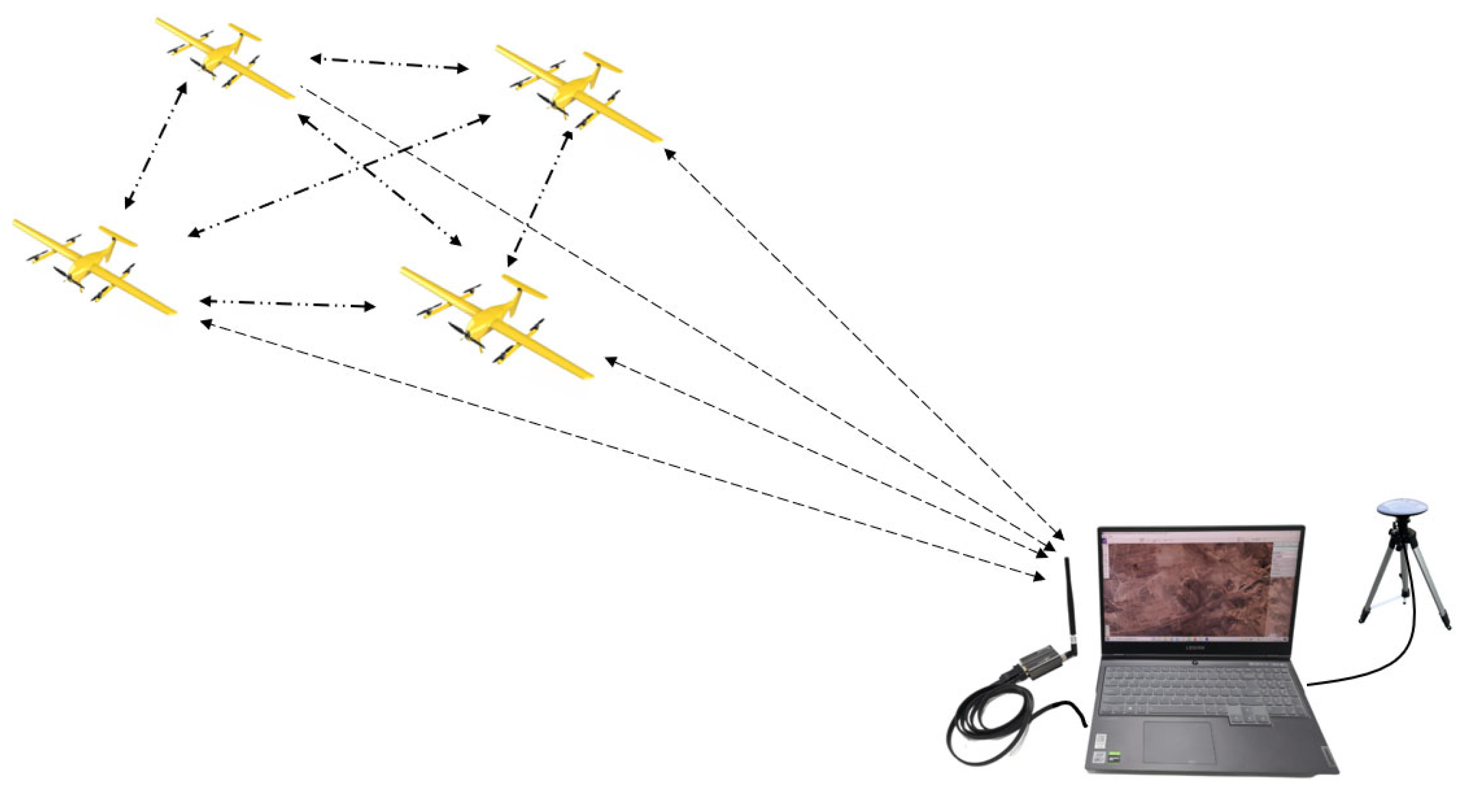
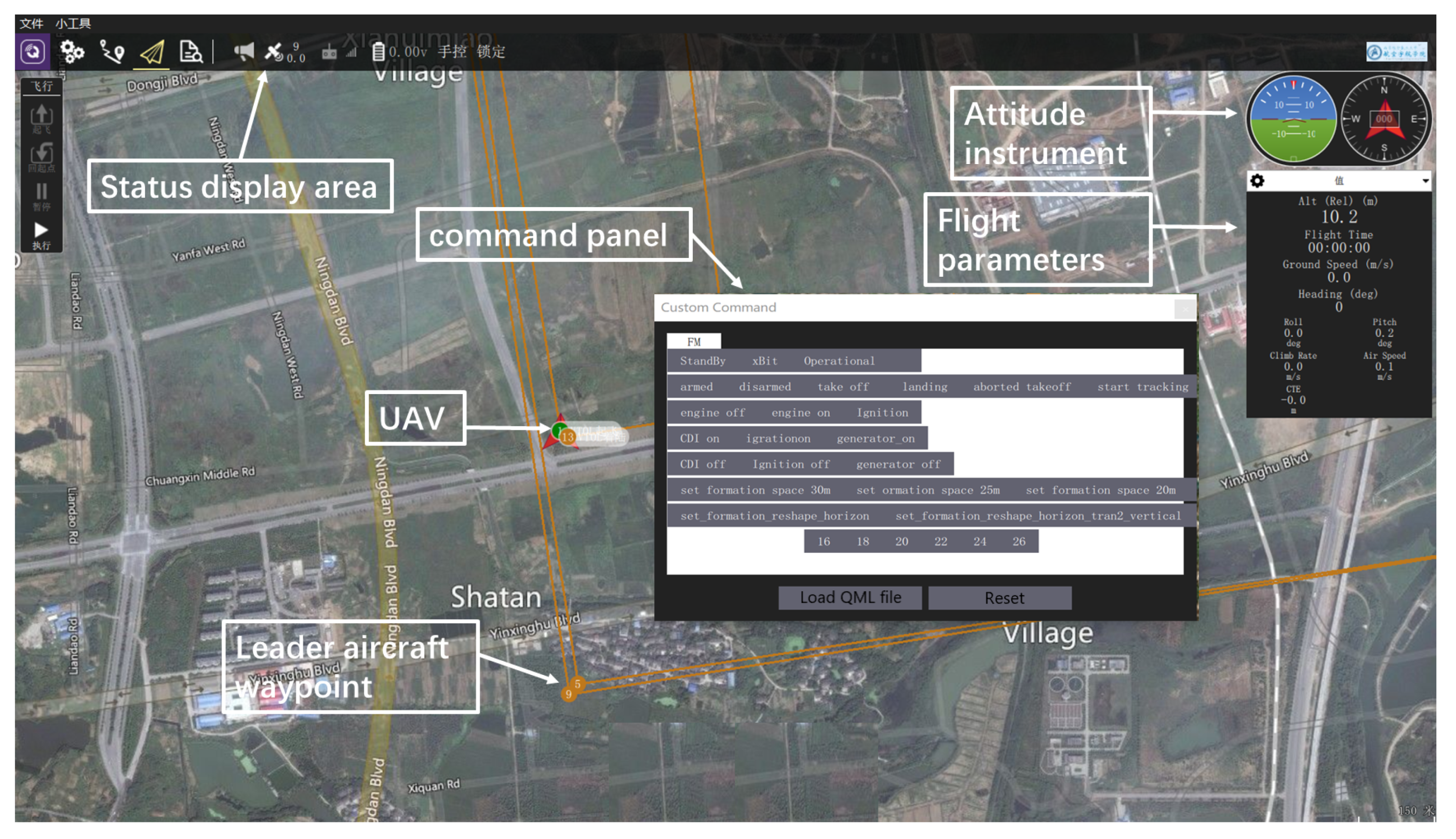
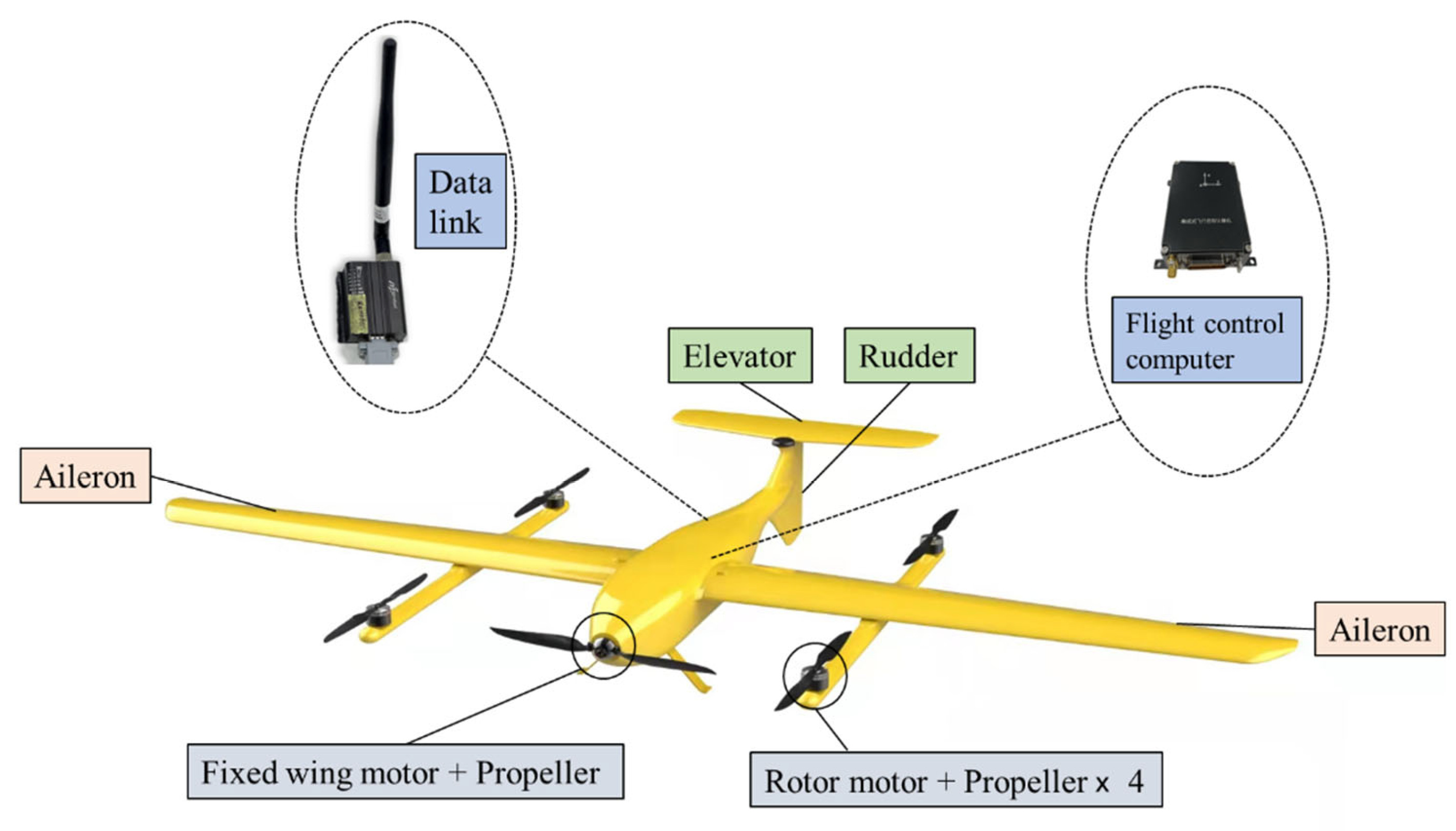
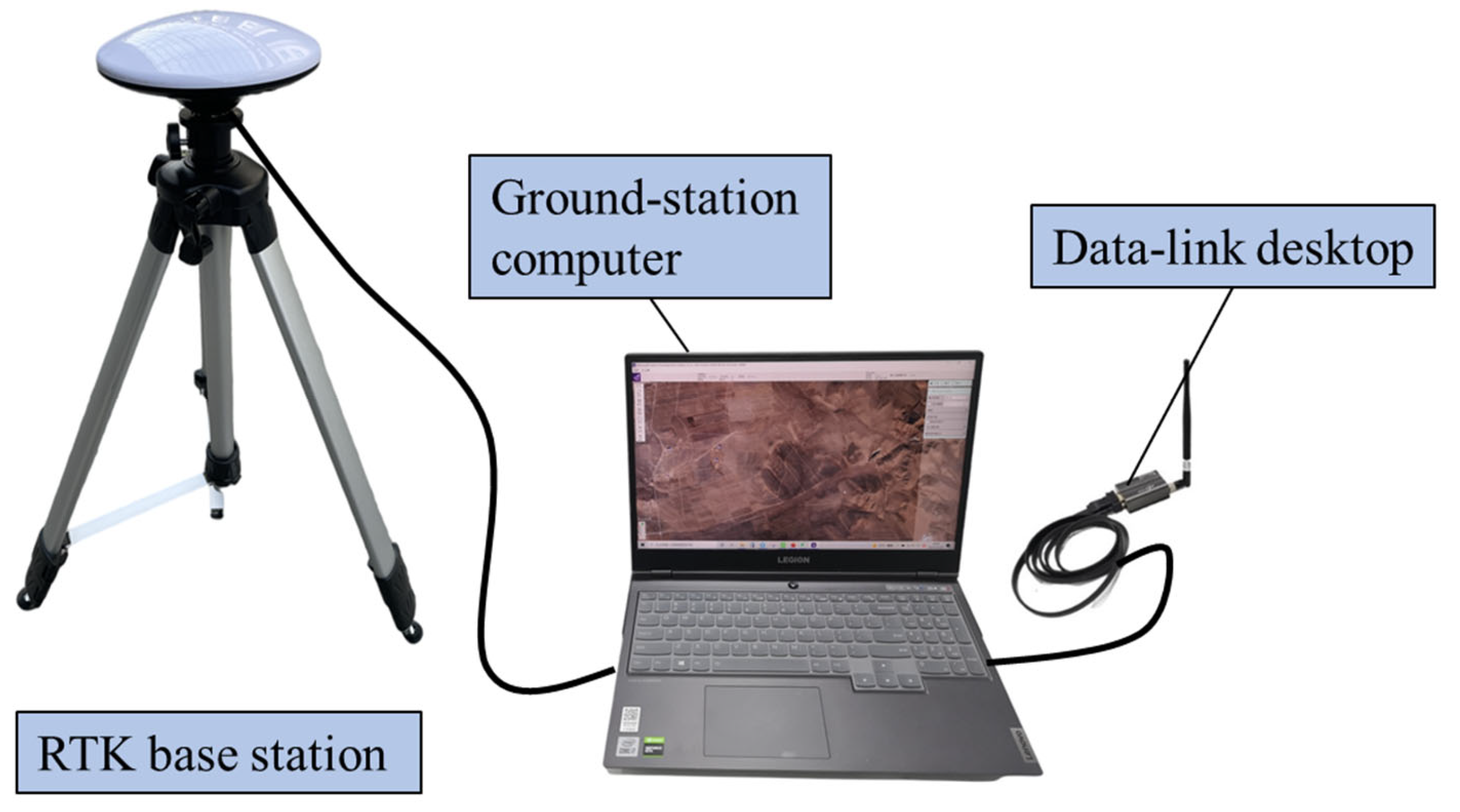
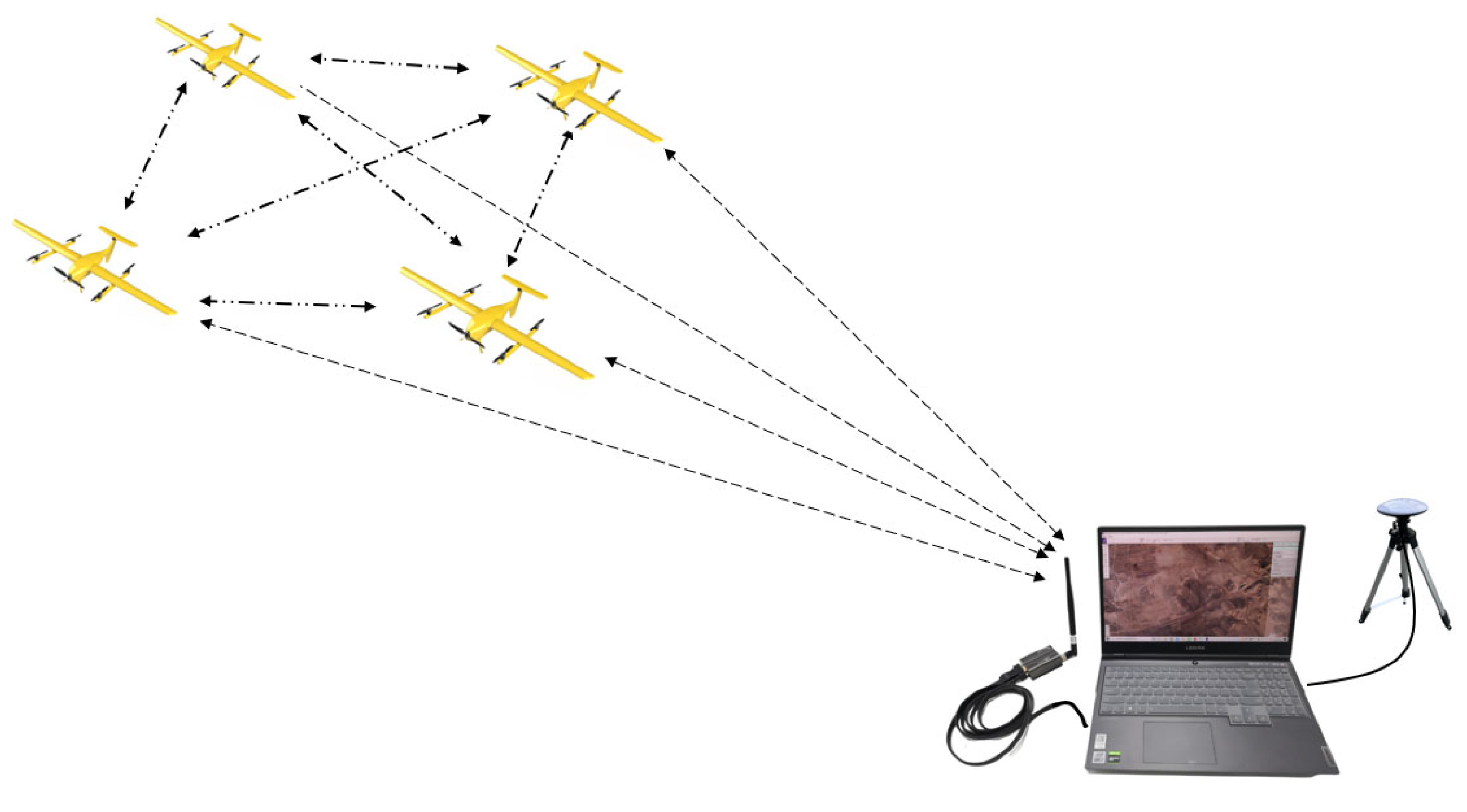
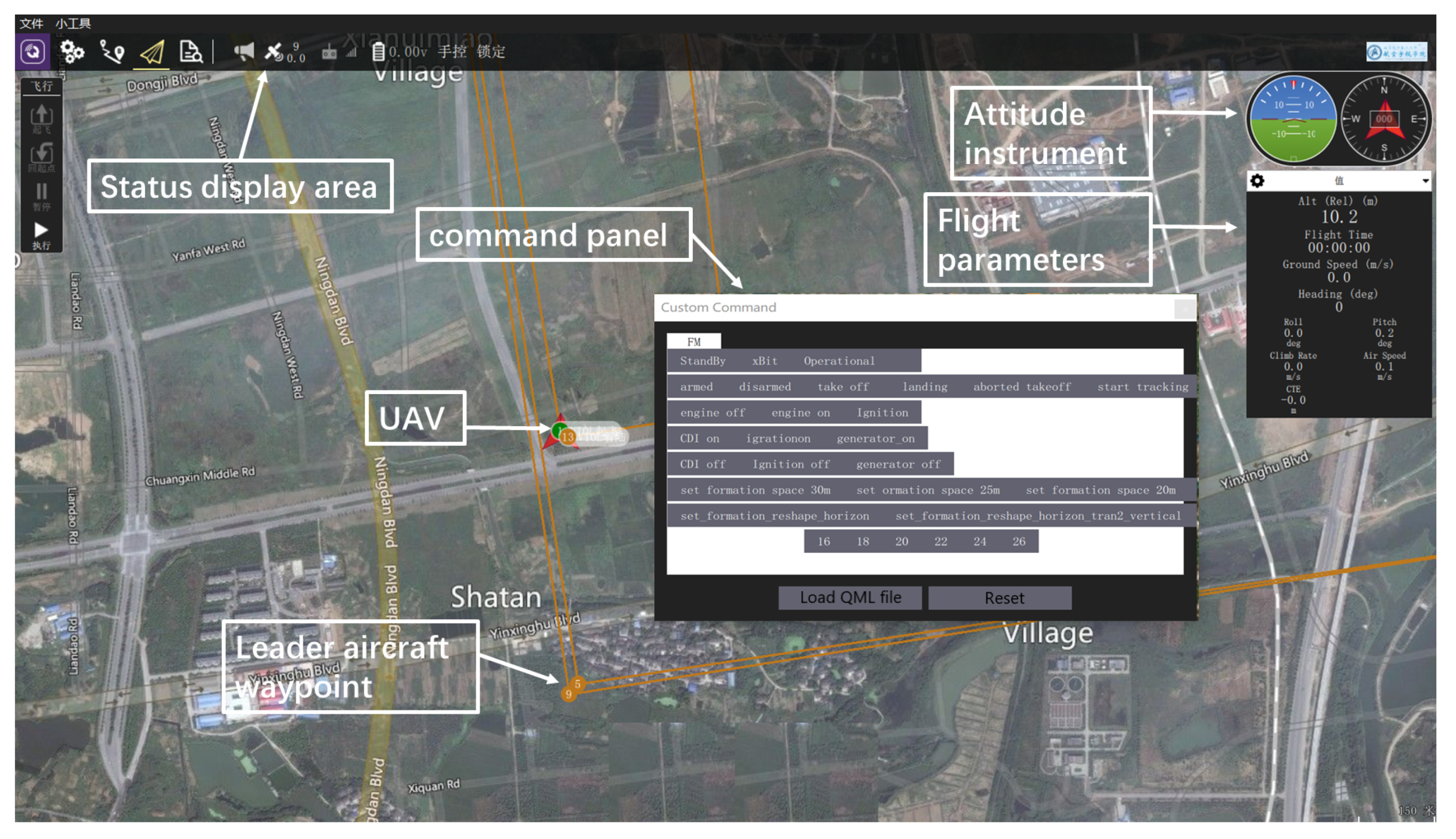
6.1. Flight Platform and Ground Measurement and Control System
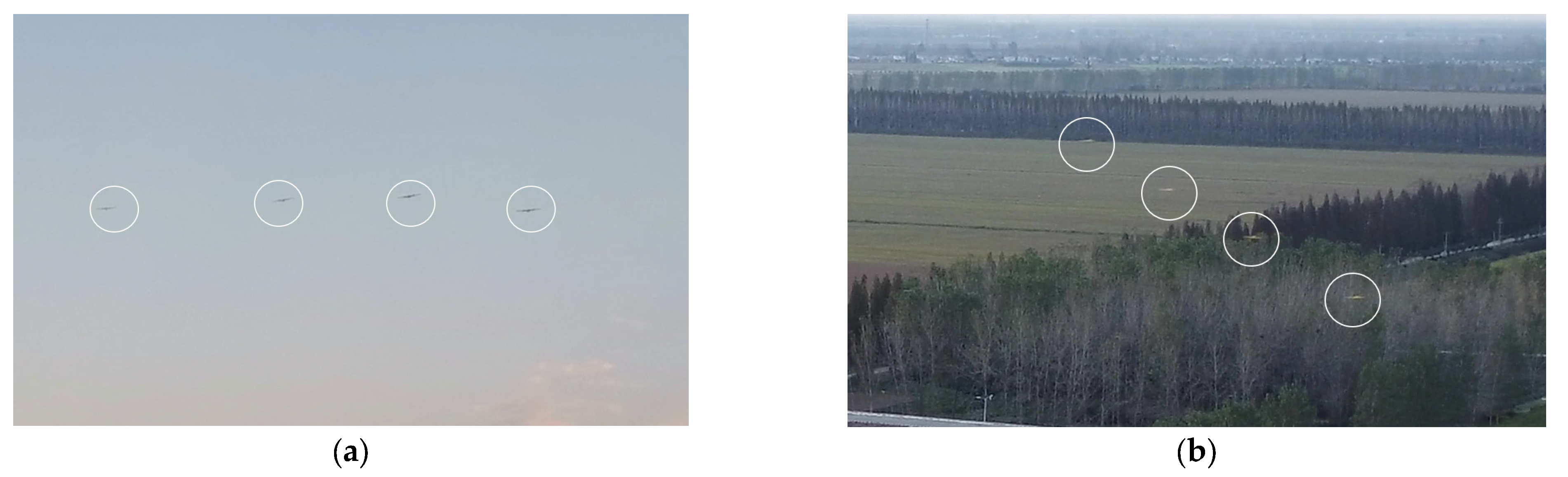
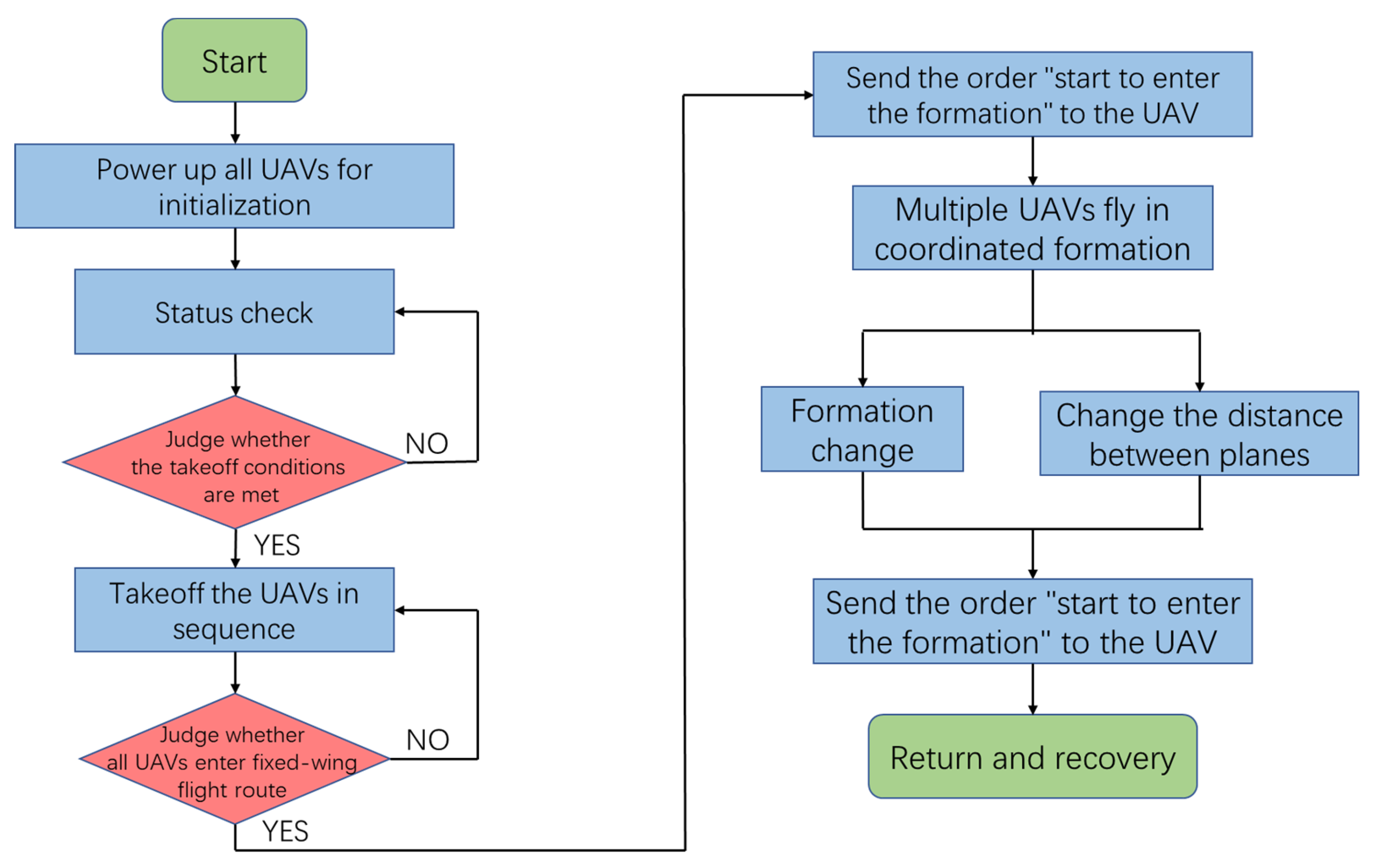
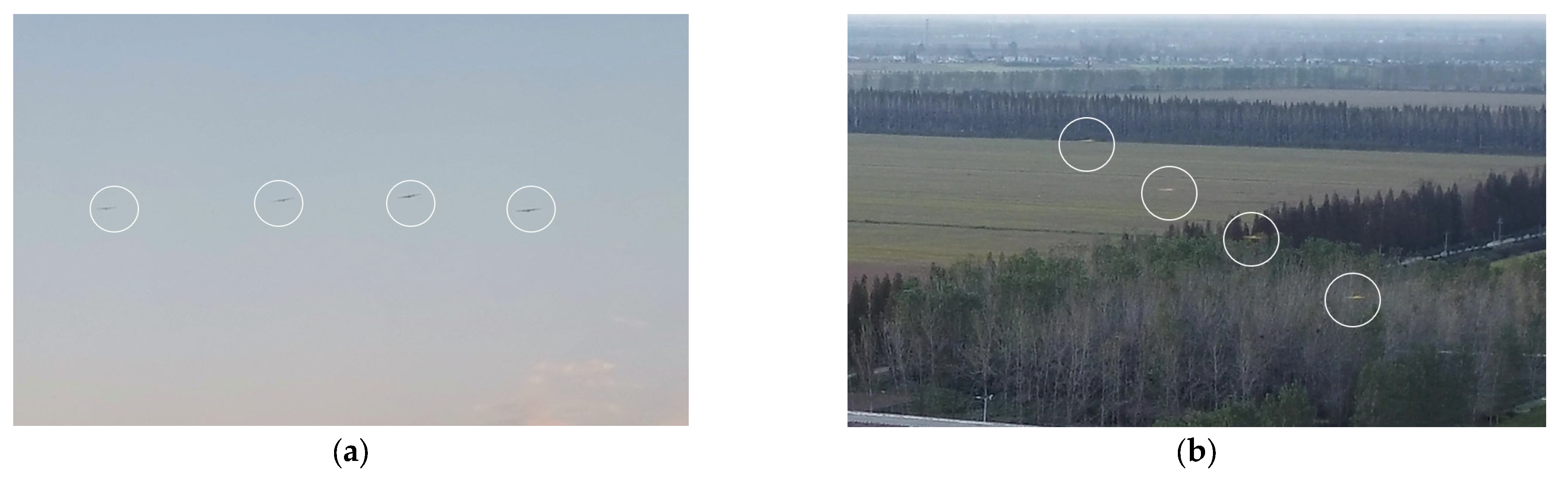
6.2. Formation Flight Test
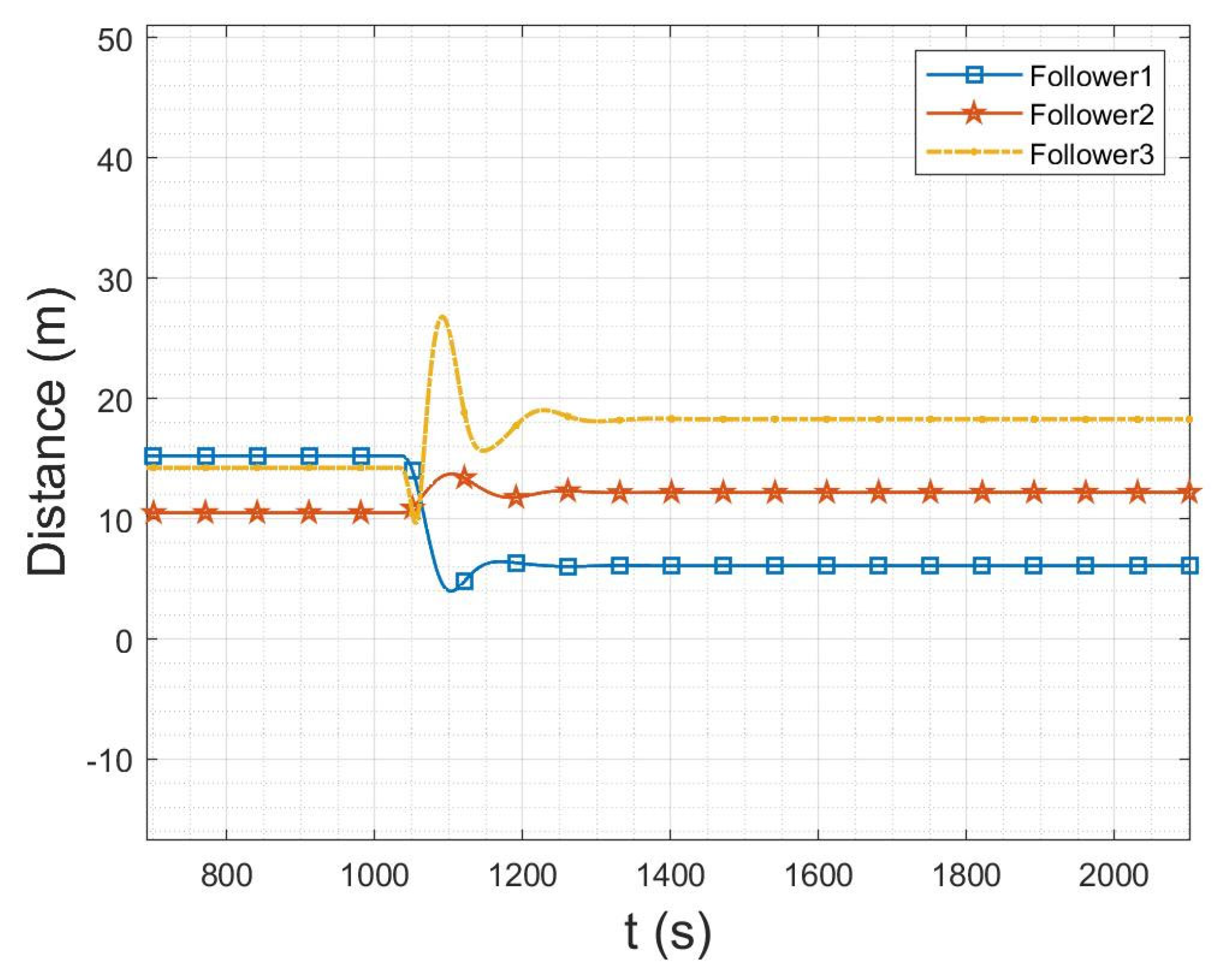
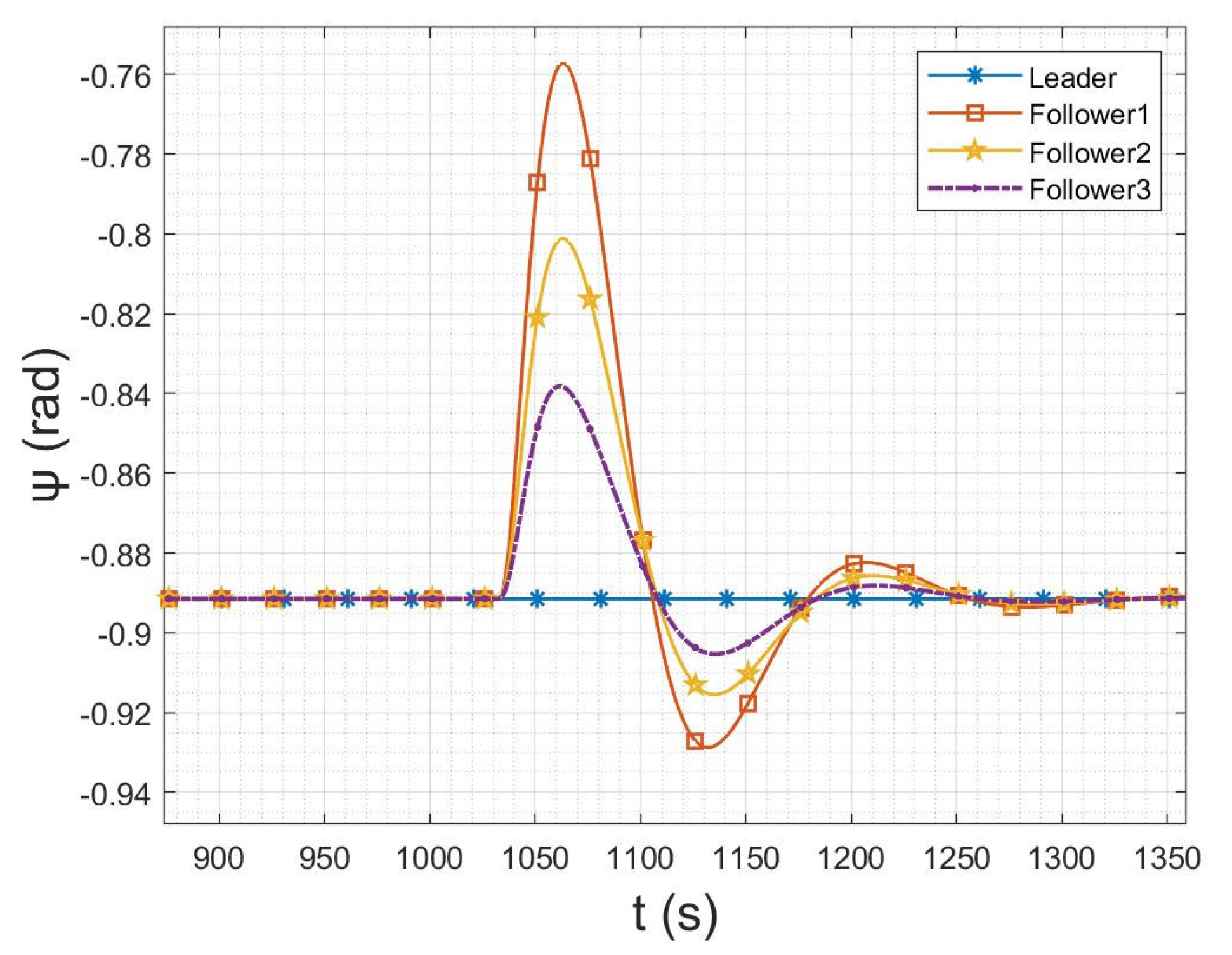
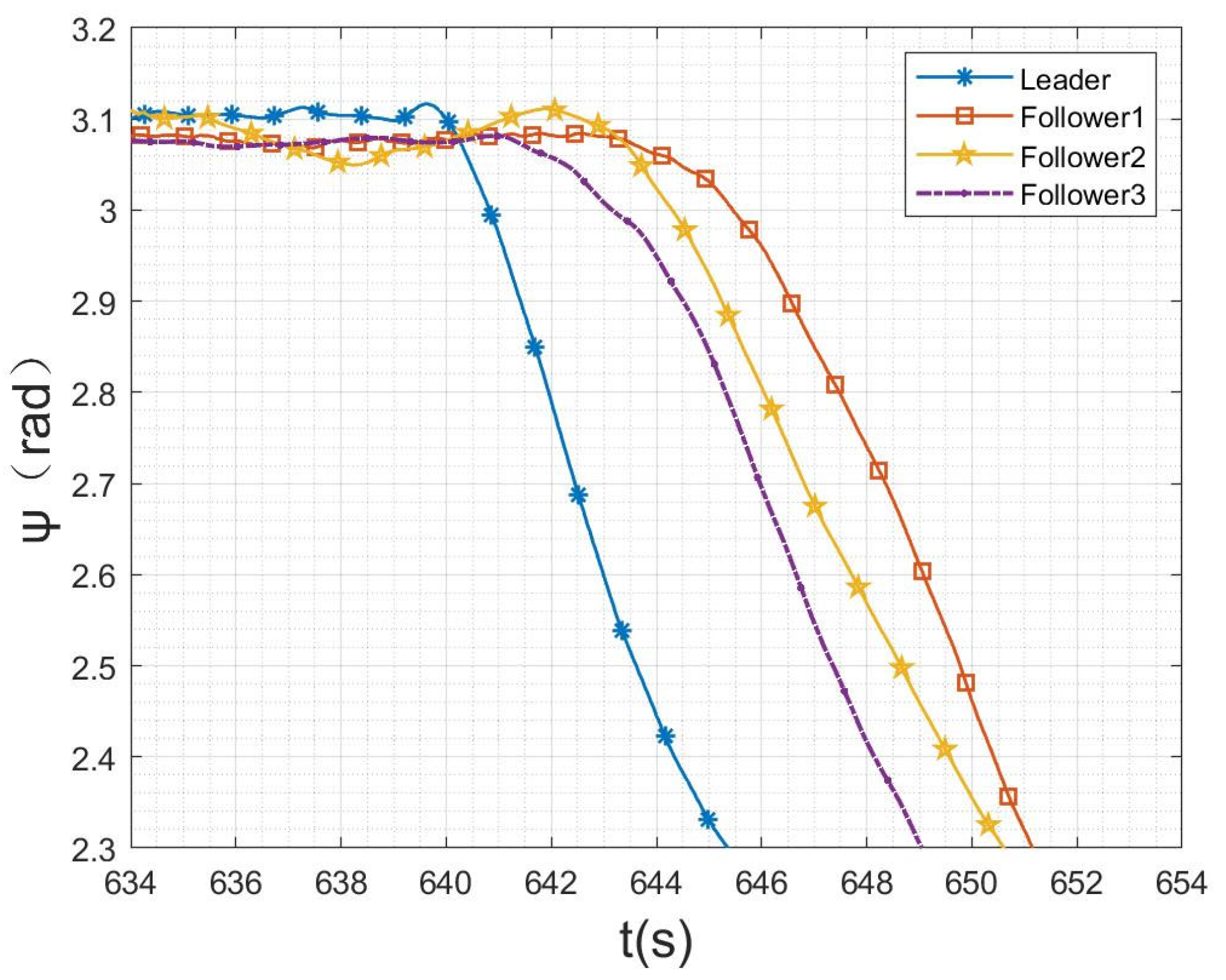
6.3. Flight Data Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bian, L.; Sun, W.; Sun, T. Trajectory Following and Improved Differential Evolution Solution for Rapid Forming of UAV Formation. IEEE Access 2019, 7, 169599–169613. [Google Scholar] [CrossRef]
- Wang, G.; Luo, H.; Xiaohuan, H.; Huaiwei, M. A Survey on Coordinated UAV Formation Management. Electron. Opt. Control. 2013, 20, 48–53. [Google Scholar]
- Anderson, B.; Fidan, B.; Yu, C.; Walle, D. UAV Formation Control: Theory and Application. Lect. Notes Control. Inf. Sci. 2008, 371, 15–33. [Google Scholar]
- Zhang, J.; Yan, J. A Novel Control Approach for Flight-Stability of Fixed-Wing UAV Formation With Wind Field. IEEE Syst. J. 2020, 15, 2098–2108. [Google Scholar] [CrossRef]
- Kada, B.; Khalid, M.; Shaikh, M.S. Distributed cooperative control of autonomous multi-agent UAV systems using smooth control. J. Syst. Eng. Electron. 2020, 31, 1297–1307. [Google Scholar] [CrossRef]
- Wang, Y.; Yue, Y.; Shan, M.; He, L.; Wang, D. Formation Reconstruction and Trajectory Replanning for Multi-UAV Patrol. IEEE/ASME Trans. Mechatron. 2021, 26, 719–729. [Google Scholar] [CrossRef]
- Lee, M.-Y.; Chen, B.-S.; Tsai, C.-Y.; Hwang, C.-L. Stochastic H∞ Robust Decentralized Tracking Control of Large-Scale Team Formation UAV Network System With Time-Varying Delay and Packet Dropout Under Interconnected Couplings and Wiener Fluctuations. IEEE Access 2021, 9, 41976–41997. [Google Scholar] [CrossRef]
- Kebo, I.L.; Chen, L.; Bai, X.Z. Differential geometric modeling of guidance problem for interceptors. Sci. China Technol. Sci. 2011, 54, 13. [Google Scholar]
- Sun, S.; Zhou, D.; Hou, W.T. A guidance law with finite time convergence accounting for autopilot lag. Aerosp. Sci. Technol. 2013, 25, 132–137. [Google Scholar] [CrossRef]
- Wang, Y.; Shan, M.; Wang, D. Motion Capability Analysis for Multiple Fixed-Wing UAV Formations With Speed and Heading Rate Constraints. IEEE Trans. Control. Netw. Syst. 2019, 7, 977–989. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, J.; Zhang, P. Multi-UAV Formation Control Based on a Novel Back-Stepping Approach. IEEE Trans. Veh. Technol. 2020, 69, 2437–2448. [Google Scholar] [CrossRef]
- Dong, X.; Yu, B.; Shi, Z.; Zhong, Y. Time-Varying Formation Control for Unmanned Aerial Vehicles: Theories and Applications. IEEE Trans. Control. Syst. Technol. 2014, 23, 340–348. [Google Scholar] [CrossRef]
- Yang, J.; Wang, X.; Baldi, S.; Singh, S.; Fari, S. A software-in-the-loop implementation of adaptive formation control for fixed-wing UAVs. IEEE/CAA J. Autom. Sin. 2019, 6, 1230–1239. [Google Scholar] [CrossRef]
- Gomez, M.B.; Gomez, B.M. Hardware-in-the-Loop Simulation. Transp. Res. Part C Emerg. Technol. 2001, 12, 73–89. [Google Scholar]
- Ren, W.; Steurer, M.; Baldwin, T.L. Improve the Stability and the Accuracy of Power Hardware-in-the-Loop Simulation by Selecting Appropriate Interface Algorithms. In Proceedings of the Industrial & Commercial Power Systems Technical Conference IEEE, Edmonton, AB, Canada, 6–11 May 2007. [Google Scholar]
- Duan, H.; Qiu, H. Unmanned Aerial Vehicle Distributed Formation Rotation Control Inspired by Leader-Follower Reciprocation of Migrant Birds. IEEE Access 2018, 6, 23431–23443. [Google Scholar] [CrossRef]
- Chang, L.B.; Ng, Q.S. A flexible virtual structure formation keeping control for fixed-wing UAVs. In Proceedings of the IEEE International Conference on Control & Automation IEEE, Santiago, Chile, 19–21 December 2011. [Google Scholar]
- Li, N.H.; Liu, H.H. Formation UAV flight control using virtual structure and motion synchronization. In Proceedings of the American Control Conference IEEE, Seattle, WA, USA, 11–13 June 2008. [Google Scholar]
- Tanner, G.H.; Pappas, G.J.; Kumar, V. Leader-to-Formation Stability. IEEE Trans. Robot. Autom. 2004, 20, 443–455. [Google Scholar] [CrossRef] [Green Version]
- Stipanovic, D.M.; Inalhan, G.; Teo, R.; Tomlin, C.J. Decentralized overlapping control of a formation of unmanned aerial vehicles. In Proceedings of the IEEE Conference on Decision & Control IEEE, Maui, HI, USA,, 9–12 December 2003. [Google Scholar]
- Vignoni, A.; Garrelli, F.; García-Nieto, S.; Picó, J. UAV Reference Conditioning for Formation Control Via Set Invariance and Sliding Modes. IFAC Proceeding Vol. 2012, 45, 317–322. [Google Scholar] [CrossRef]
- Liao, F.; Teo, R.; Wang, J.L.; Dong, X.; Lin, F.; Peng, K. Distributed Formation and Reconfiguration Control of VTOL UAVs. IEEE Trans. Control. Syst. Technol. 2017, 25, 270–277. [Google Scholar] [CrossRef]
- Wei, L. Distributed UAV formation control using differential game approach. Aerosp. Technol. 2014, 35, 54–62. [Google Scholar]
- Liu, C. Multiple UAV formation control based on consensus control structure. J. Huazhong Univ. Sci. Technol. 2015, 43, 481–485. [Google Scholar]
- Gosiewski, Z.; Ambroziak, L. UAV Autonomous Formation Flight Experiment with Virtual Leader Control Structure. Solid State Phenom. 2013, 198, 254–259. [Google Scholar] [CrossRef]
- Shen, D.B.; Sun, Z.; Sun, W. Leader-follower formation control without leader’s velocity information. Sci. China Inform. Sci. 2014, 57, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Shi-Cai, L.I.U.; Da-Long, T.A.N.; Guang-Jun, L.I.U. Robust Leader-follower Formation Control of Mobile Robots Based on a Second Order Kinematics Model. Acta Autom. Sin. 2007, 33, 947–955. [Google Scholar]
- Guo, D.; Wang, H.; Weidong, C. Image-based Leader-Follower Formation Control of Mobile Robots with Uncalibrated On-board Camera. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, DC, USA, 26–30 May 2015. [Google Scholar]
- Ajorlou, A.; Moezzi, K.; Aghdam, A.G.; Nersesov, S.G. Two-stage time-optimal formation reconfiguration strategy. Automatica 2013, 62, 496–502. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Zhang, J.; Cao, X.; Wang, F. Optimal satellite formation reconfiguration strategy based on relative orbital elements. Acta Astronaut. 2012, 76, 99–114. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter |
|---|---|
| Mass (kg) | 6.0 |
| ) | 0.46 |
| ) | 2.2 |
| ) | 20 |
| ) | 23 |
| ) | 17 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhan, G.; Gong, Z.; Lv, Q.; Zhou, Z.; Wang, Z.; Yang, Z.; Zhou, D. Flight Test of Autonomous Formation Management for Multiple Fixed-Wing UAVs Based on Missile Parallel Method. Drones 2022, 6, 99. https://doi.org/10.3390/drones6050099
Zhan G, Gong Z, Lv Q, Zhou Z, Wang Z, Yang Z, Zhou D. Flight Test of Autonomous Formation Management for Multiple Fixed-Wing UAVs Based on Missile Parallel Method. Drones. 2022; 6(5):99. https://doi.org/10.3390/drones6050099
Chicago/Turabian StyleZhan, Guang, Zheng Gong, Quanhui Lv, Zan Zhou, Zian Wang, Zhen Yang, and Deyun Zhou. 2022. "Flight Test of Autonomous Formation Management for Multiple Fixed-Wing UAVs Based on Missile Parallel Method" Drones 6, no. 5: 99. https://doi.org/10.3390/drones6050099
APA StyleZhan, G., Gong, Z., Lv, Q., Zhou, Z., Wang, Z., Yang, Z., & Zhou, D. (2022). Flight Test of Autonomous Formation Management for Multiple Fixed-Wing UAVs Based on Missile Parallel Method. Drones, 6(5), 99. https://doi.org/10.3390/drones6050099