



Aerodynamic Numerical Simulation Analysis of Water–Air Two-Phase Flow in Trans-Medium Aircraft

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Modeling an Aircraft across Media
2.1. Modeling of Air Media
2.2. Establishment of Underwater Propeller Propulsion Model
2.3. Multimedia Spanning Model Establishment
3. Numerical Simulation Based on OpenFOAM Open-Source Platform
3.1. Fluid Governing Equations
3.2. Turbulence Model
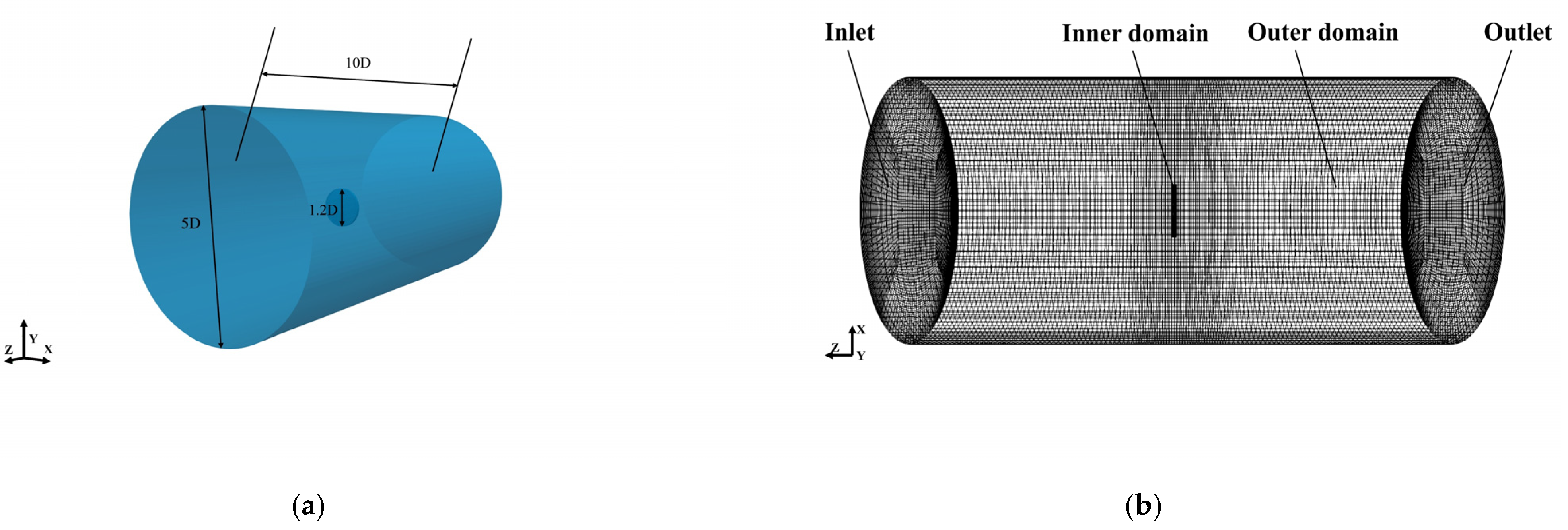
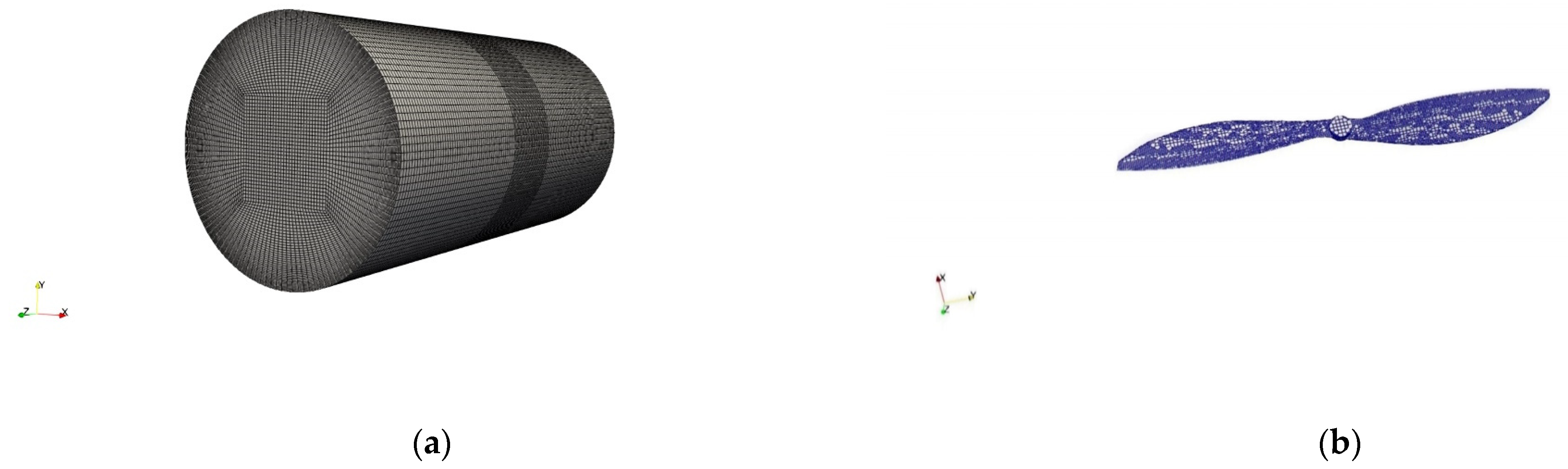
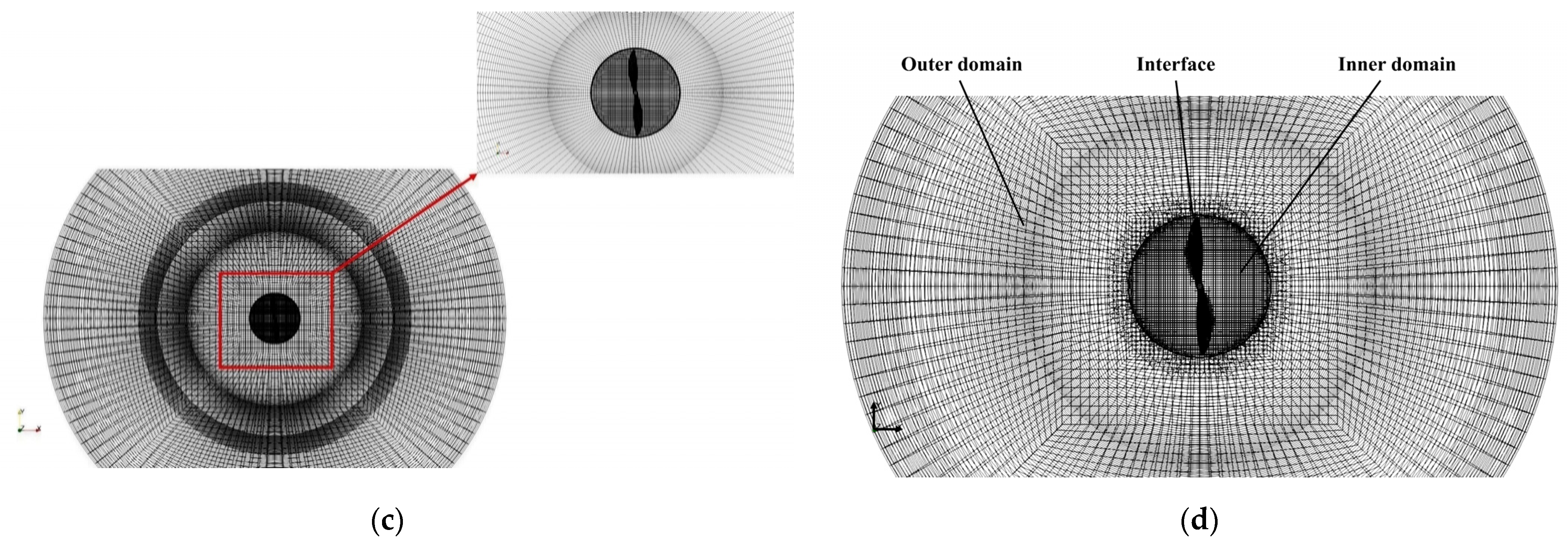
3.3. Simulation Analysis of Multi-Medium Crossing for a Trans-Medium Aircraft
3.3.1. Air Single Medium Aerodynamic Analysis
3.3.2. Hydrodynamic Analysis of Single Underwater Medium
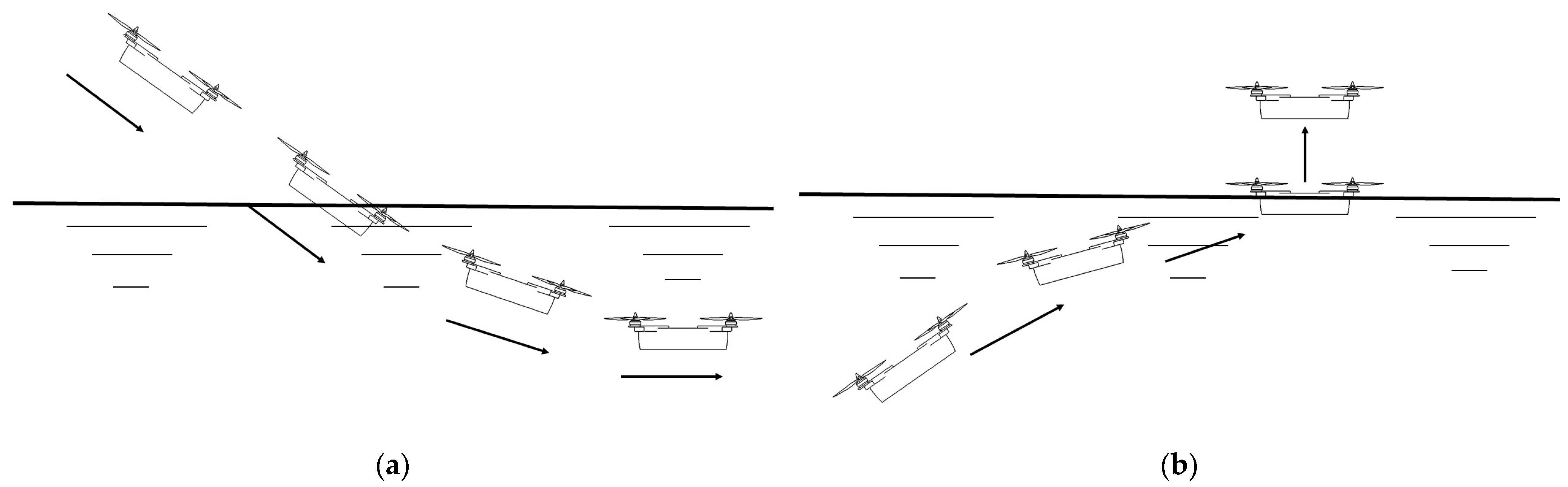
3.3.3. Numerical Simulation of Water Entry and Exit for a Trans-Medium Aircraft
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, Y.Z.; Li, J.; Huo, J.W.; Guo, M.M.; Li, Z.C.; Neusypin, K.A.; IEEE. Analysis of the hydrodynamic performance of a water-air amphibious trans-medium hexacopter. In Proceedings of the Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 4959–4964. [Google Scholar]
- Strauss, M. The Flying Submarine. Smithsonian 2013, 44, 100. [Google Scholar]
- Mohiuddin, A.; Tarek, T.; Zweiri, Y.; Gan, D.M. A Survey of Single and Multi-UAV Aerial Manipulation. Unmanned Syst. 2020, 8, 119–147. [Google Scholar] [CrossRef]
- Izraelevitz, J.S.; Triantafyllou, M.S.; IEEE. A Novel Degree of Freedom in Flapping Wings Shows Promise for a Dual Aerial/Aquatic Vehicle Propulsor. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5830–5837. [Google Scholar]
- Siddall, R.; Kovac, M.; IEEE. A Water Jet Thruster for an Aquatic Micro Air Vehicle. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 3979–3985. [Google Scholar]
- von Karman, T. On the Statistical Theory of Turbulence. Proc. Natl. Acad. Sci. USA 1937, 23, 98–105. [Google Scholar] [CrossRef]
- Wagner, H. Über Stoß- und Gleitvorgänge an der Oberfläche von Flüssigkeiten. ZAMM J. Appl. Math. Mech. Z. Angew. Math. Mech. 1932, 12, 193–215. [Google Scholar] [CrossRef]
- Dobrovol’skaya, Z.N. On some problems of similarity flow of fluid with a free surface. J. Fluid Mech. 2006, 36, 805–829. [Google Scholar] [CrossRef]
- Semenov, Y.A.; Wu, G.X. Asymmetric impact between liquid and solid wedges. Proc. R. Soc. A-Math. Phys. Eng. Sci. 2013, 469, 1–20. [Google Scholar] [CrossRef]
- Mei, X.M.; Liu, Y.M.; Yue, D.K.P. On the water impact of general two-dimensional sections. Appl. Ocean. Res. 1999, 21, 1–15. [Google Scholar] [CrossRef]
- Afzal, A.; Ansari, Z.; Faizabadi, A.R.; Ramis, M.K. Parallelization Strategies for Computational Fluid Dynamics Software: State of the Art Review. Arch. Comput. Methods Eng. 2017, 24, 337–363. [Google Scholar] [CrossRef]
- Di, Y.T.; Zhao, L.H.; Jia, M.; Eldad, A. A resolved CFD-DEM-IBM algorithm for water entry problems. Ocean. Eng. 2021, 240, 110151. [Google Scholar] [CrossRef]
- Zhang, H.; Tan, Y.Q.; Shu, S.; Niu, X.D.; Trias, F.X.; Yang, D.M.; Li, H.; Sheng, Y. Numerical investigation on the role of discrete element method in combined LBM-IBM-DEM modeling. Comput. Fluids 2014, 94, 37–48. [Google Scholar] [CrossRef]
- Schlanderer, S.C.; Weymouth, G.D.; Sandberg, R.D. The boundary data immersion method for compressible flows with application to aeroacoustics. J. Comput. Phys. 2017, 333, 440–461. [Google Scholar] [CrossRef] [Green Version]
- Guo, B.D.; Liu, P.Q.; Qu, Q.L.; Wang, J.W. Effect of pitch angle on initial stage of a transport airplane ditching. Chin. J. Aeronaut. 2013, 26, 17–26. [Google Scholar] [CrossRef]
- Streckwall, H.; Lindenau, O.; Bensch, L. Aircraft ditching: A free surface/free motion problem. Arch. Civ. Mech. Eng. 2007, 7, 177–190. [Google Scholar] [CrossRef]
- Wang, Z.Y.; Stern, F. Volume-of-fluid based two-phase flow methods on structured multiblock and overset grids. Int. J. Numer. Methods Fluids 2022, 94, 557–582. [Google Scholar] [CrossRef]
- Fernando, H.; De Silvia, A.T.A.; De Zoysa, M.D.C.; Dilshan, K.; Munasinghe, S.R.; IEEE. Modelling, Simulation and Implementation of a Quadrotor UAV. In Proceedings of the 8th IEEE International Conference on Industrial and Information Systems (ICIIS), Peradeniya, Sri Lanka, 17–20 December 2013; pp. 207–212. [Google Scholar]
- Karahan, M.; Kasnakoglu, C.; IEEE. Modeling and Simulation of Quadrotor UAV Using PID Controller. In Proceedings of the 11th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), Pitesti, Romania, 27–29 June 2019. [Google Scholar]
- Chen, Z.Y.; Xu, B.; IEEE. Control simulation and anti-jamming verification of quadrotor UAV Based on Matlab. In Proceedings of the 5th International Conference on Intelligent Informatics and Biomedical Sciences (ICIIBMS), Naha, Japan, 18–20 November 2020; pp. 70–75. [Google Scholar]
- Hota, R.K.; Kumar, C.S. Derivation of the Rotation Matrix for an Axis-Angle Rotation Based on an Intuitive Interpretation of the Rotation Matrix. In Proceedings of the 4th International and 19th National Biennial Conferences on Machines and Mechanisms (iNaCoMM), Indian Inst Technol Mandi, Suran, India, 7 December 2019; pp. 939–945. [Google Scholar]
- Sanduleanu, S.V.; Petrov, A.G. Comment on “New exact solution of Euler’s equations (rigid body dynamics) in the case of rotation over the fixed point”. Arch. Appl. Mech. 2017, 87, 41–43. [Google Scholar] [CrossRef]
- Szelangiewicz, T.; Zelazny, K. Hydrodynamic characteristics of the propulsion thrusters of an unmanned ship model. Sci. J. Marit. Univ. Szczec. Zesz. Nauk. Akad. Mor. W Szczec. 2020, 62, 136–141. [Google Scholar] [CrossRef]
- Ma, Z.C.; Feng, J.F.; Yang, J. Research on vertical air-water transmedia control of Hybrid Unmanned Aerial Underwater Vehicles based on adaptive sliding mode dynamical surface control. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418770531. [Google Scholar] [CrossRef]
- Deissler, R.G. Derivation Of Navier-Stokes Equation. Am. J. Phys. 1976, 44, 1128–1130. [Google Scholar] [CrossRef]
- Fu, S.; Guo, Y.; Qian, W.Q.; Wang, C. Recent progress in Nonlinear Eddy-Viscosity turbulence modeling. Acta Mech. Sin. 2003, 19, 409–419. [Google Scholar]
- Shen, D.Z.; Zhang, H.; Li, H.J. Comparison of Two Two-Equation Turbulence Model Used for the Numerical Simulation of Underwater Ammunition Fuze Turbine Flow Field. In Proceedings of the International Conference on Manufacturing Engineering and Automation (ICMEA 2012), Guangzhou, China, 16–18 November 2012; pp. 1968–1972. [Google Scholar]
- Zhan, J.M.; Li, Y.T.; Wai, W.H.O.; Hu, W.Q. Comparison between the Q criterion and Rortex in the application of an in-stream structure. Phys. Fluids 2019, 31, 121701. [Google Scholar] [CrossRef]
- Lei, Y.; Huang, Y.Y.; Wang, H.D. Effects of Wind Disturbance on the Aerodynamic Performance of a Quadrotor MAV during Hovering. J. Sens. 2021, 2021, 6681716. [Google Scholar] [CrossRef]
- Zhao, M.H.; Liu, X.Y.; Chang, Y.S.; Chen, Q.J.; IEEE. Force Simulation Analysis of Underground Quadrotor UAV Based on Virtual Laboratory Technology. In Proceedings of the 6th Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), Electr Network, 16–18 July 2021; pp. 45–48. [Google Scholar]
- Hou, L.X.; Hu, A.K. Theoretical investigation about the hydrodynamic performance of propeller in oblique flow. Int. J. Nav. Archit. Ocean. Eng. 2019, 11, 119–130. [Google Scholar] [CrossRef]
- Eom, M.J.; Jang, Y.H.; Paik, K.J. A study on the propeller open water performance due to immersion depth and regular wave. Ocean. Eng. 2021, 219, 108265. [Google Scholar] [CrossRef]
- Madrane, A. Parallel implementation of a dynamic overset unstructured grid approach. In Proceedings of the 3rd International Conference on Computational Fluid Dynamics, Toronto, ON, Canada, 12–16 July 2004; pp. 733–739. [Google Scholar]
- Kamath, A.; Bihs, H.; Arntsen, O.A. Study of Water Impact and Entry of a Free Falling Wedge Using Computational Fluid Dynamics Simulations. J. Offshore Mech. Arct. Eng.-Trans. Asme 2017, 139, 031802. [Google Scholar] [CrossRef]
- Zhang, G.Y.; Hou, Z.; Sun, T.Z.; Wei, H.P.; Li, N.; Zhou, B.; Gao, Y.J. Numerical simulation of the effect of waves on cavity dynamics for oblique water entry of a cylinder. J. Hydrodyn. 2020, 32, 1178–1190. [Google Scholar] [CrossRef]
- Peng, H.; Ling, X. Computational fluid dynamics modelling on flow characteristics of two-phase flow in micro-channels. Micro Nano Lett. 2011, 6, 372–377. [Google Scholar] [CrossRef]
- Yu, A.; Luo, X.W.; Yang, D.D.; Zhou, J.J. Experimental and numerical study of ventilation cavitation around a NACA0015 hydrofoil with special emphasis on bubble evolution and air-vapor interactions. Eng. Comput. 2018, 35, 1528–1542. [Google Scholar] [CrossRef]






























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, J.; Sha, Y.-B.; Hu, X.-Y.; Yao, J.-Y.; Chen, Y.-L. Aerodynamic Numerical Simulation Analysis of Water–Air Two-Phase Flow in Trans-Medium Aircraft. Drones 2022, 6, 236. https://doi.org/10.3390/drones6090236
Wei J, Sha Y-B, Hu X-Y, Yao J-Y, Chen Y-L. Aerodynamic Numerical Simulation Analysis of Water–Air Two-Phase Flow in Trans-Medium Aircraft. Drones. 2022; 6(9):236. https://doi.org/10.3390/drones6090236
Chicago/Turabian StyleWei, Jun, Yong-Bai Sha, Xin-Yu Hu, Jin-Yan Yao, and Yan-Li Chen. 2022. "Aerodynamic Numerical Simulation Analysis of Water–Air Two-Phase Flow in Trans-Medium Aircraft" Drones 6, no. 9: 236. https://doi.org/10.3390/drones6090236
APA StyleWei, J., Sha, Y.-B., Hu, X.-Y., Yao, J.-Y., & Chen, Y.-L. (2022). Aerodynamic Numerical Simulation Analysis of Water–Air Two-Phase Flow in Trans-Medium Aircraft. Drones, 6(9), 236. https://doi.org/10.3390/drones6090236