
Research on an Extensible Monitoring System of a Seafloor Observatory Network in Laizhou Bay

 ,
,
Abstract
:1. Introduction
- This paper focuses on the difficult problems and key technologies of the monitoring system in data communication, device management and data quality control;
- A standardized communication protocol and dynamic management algorithm are designed for plug-and-play of a large number of devices in the seafloor observatory network;
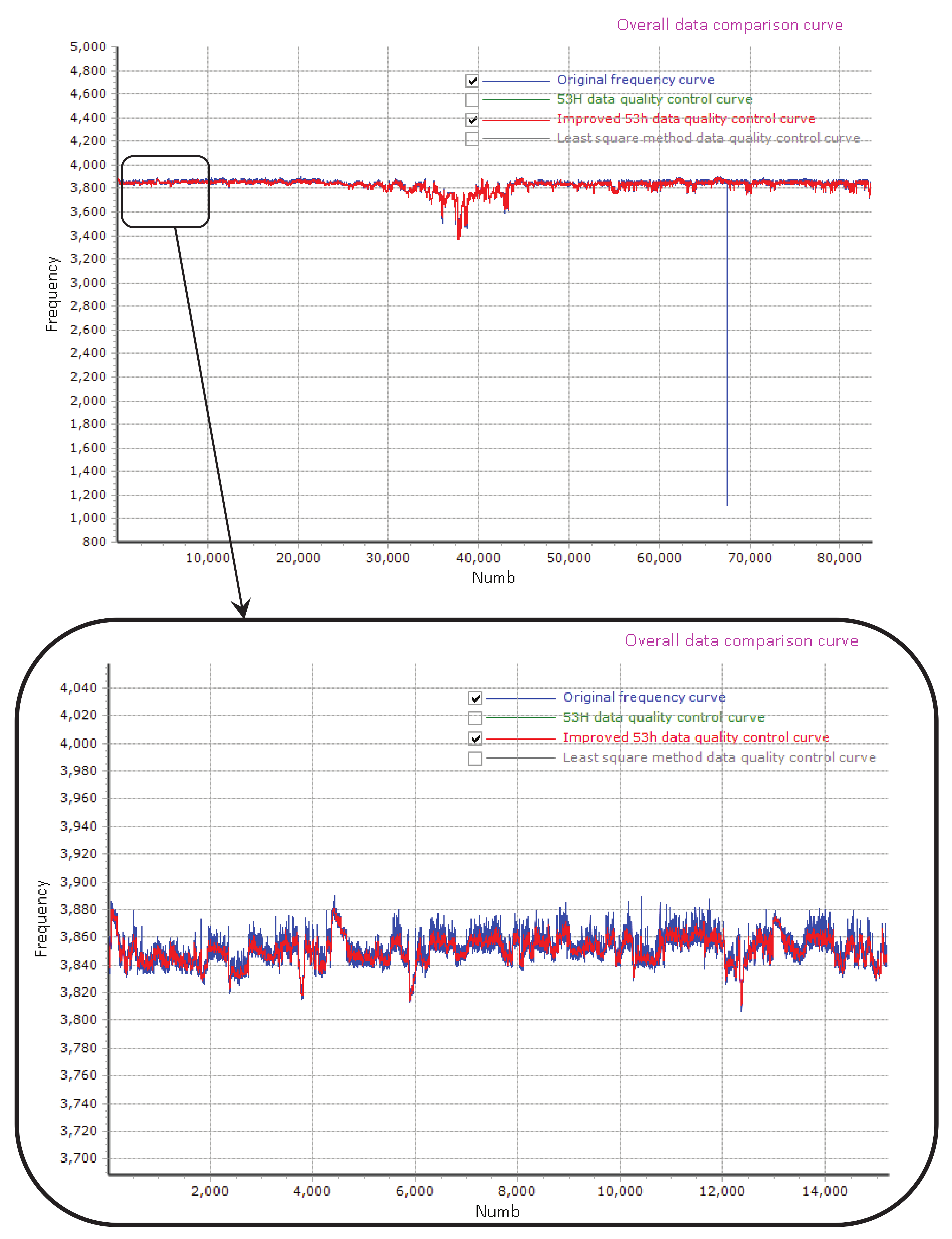
- An improved 53H algorithm is proposed to reduce the data error rate.
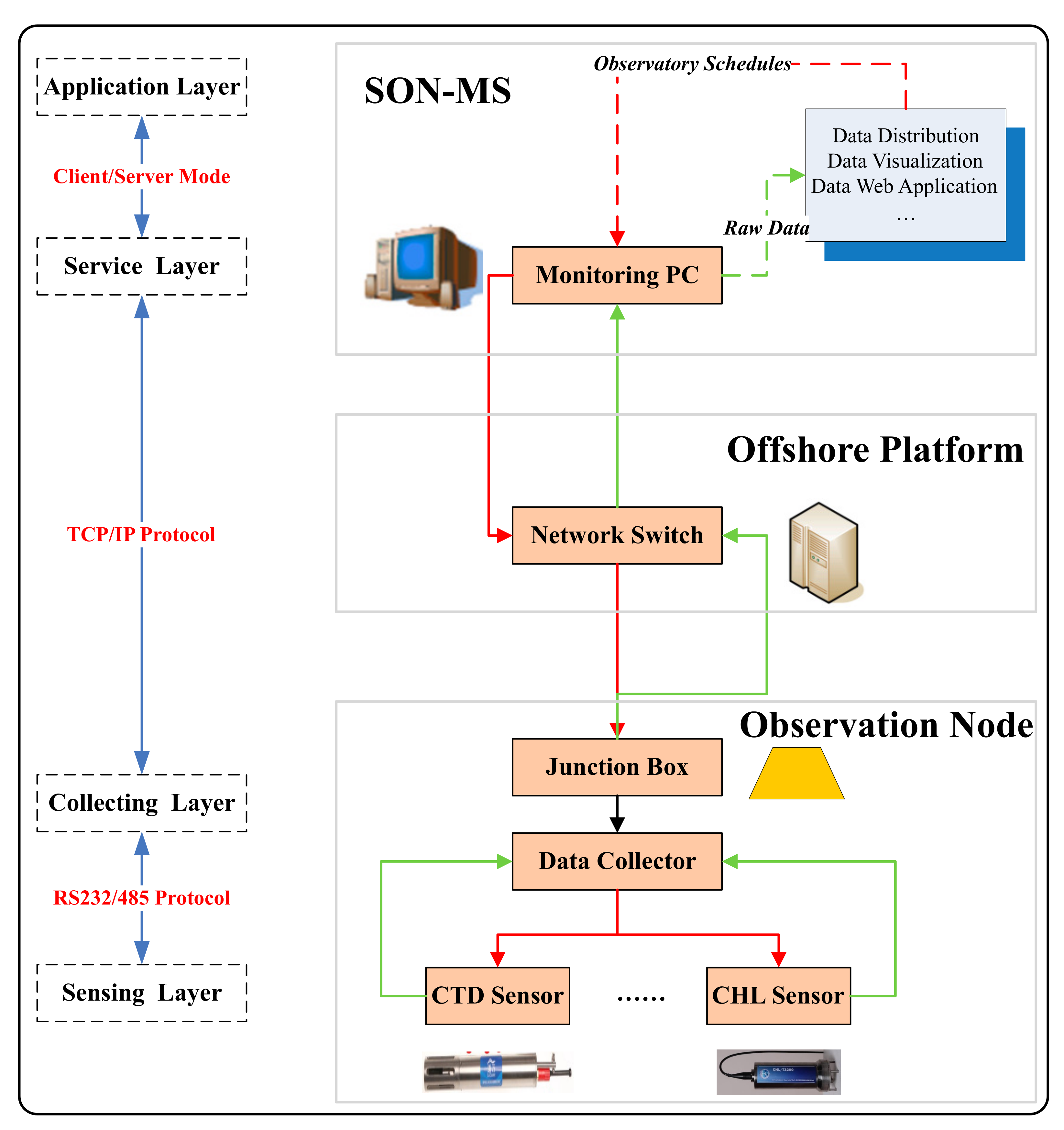
2. System Analysis
- (1)
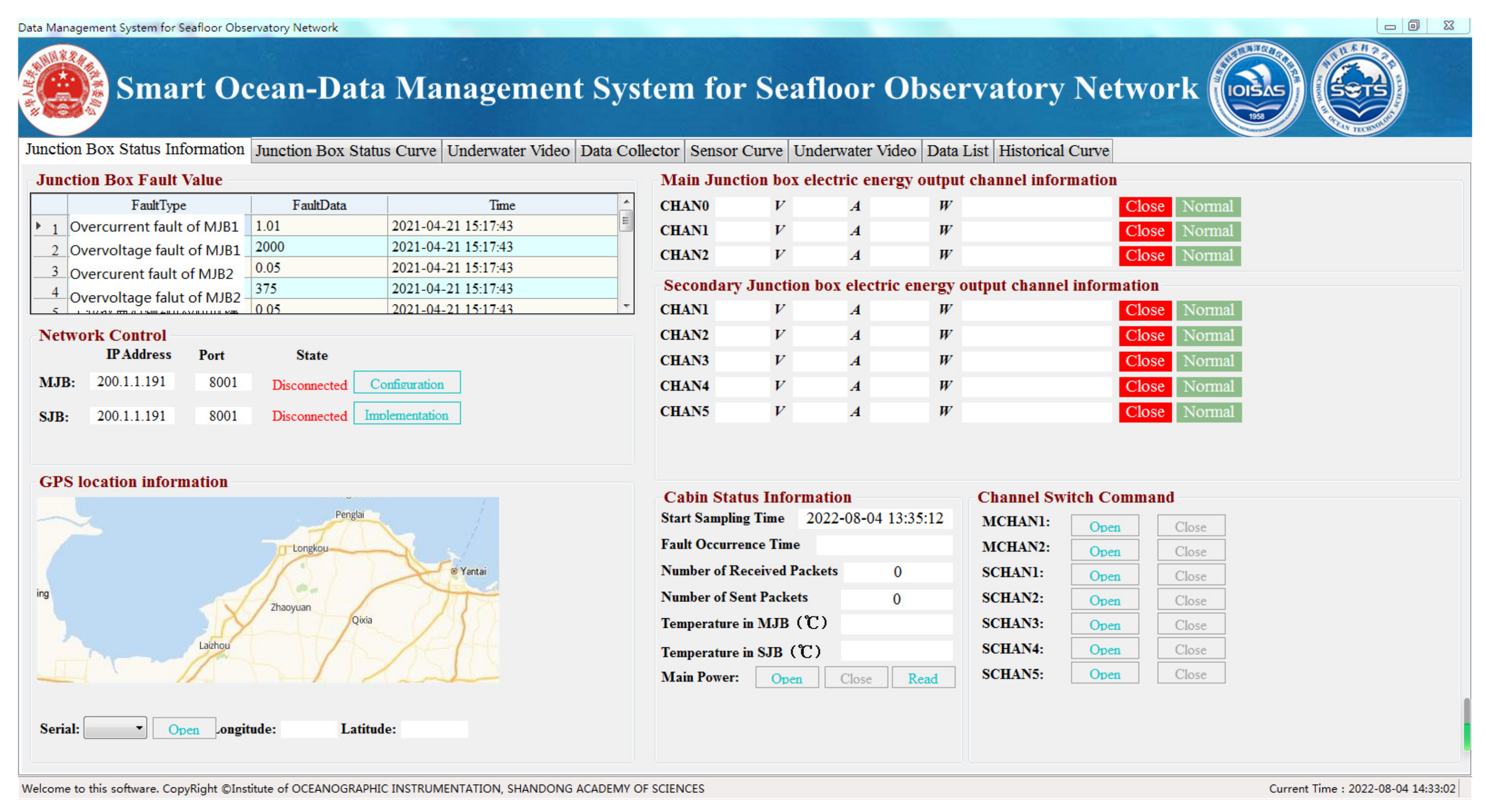
- Data communication: In order to receive the data uploaded by the seafloor observatory network sensor through the submarine electro-optic composite cable, SON-MS must have the function of network communication;
- (2)
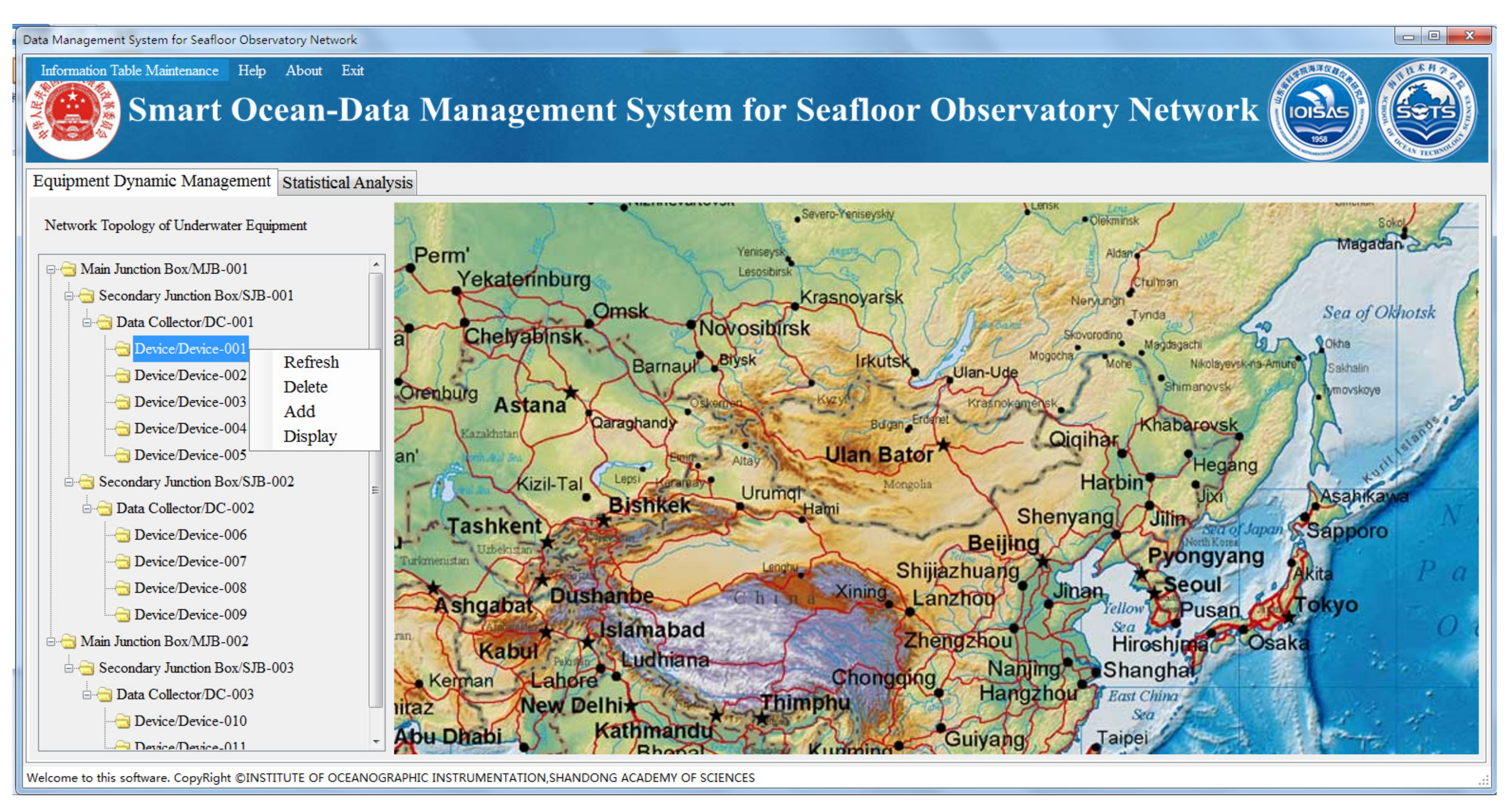
- Device management: The whole seafloor observatory network has multiple junction boxes. Each junction box can connect to multiple data collectors and each data collector can connect to a variety of sensors. The IP address, communication protocol and communication data format of each device are different. SON-MS must manage the devices, the node information and subsystem information, and view the content of node information and subsystem information. SON-MS can add and modify the relevant information to ensure that the system can adapt to dynamic changes in the shortest time when the device is added or deleted;
- (3)
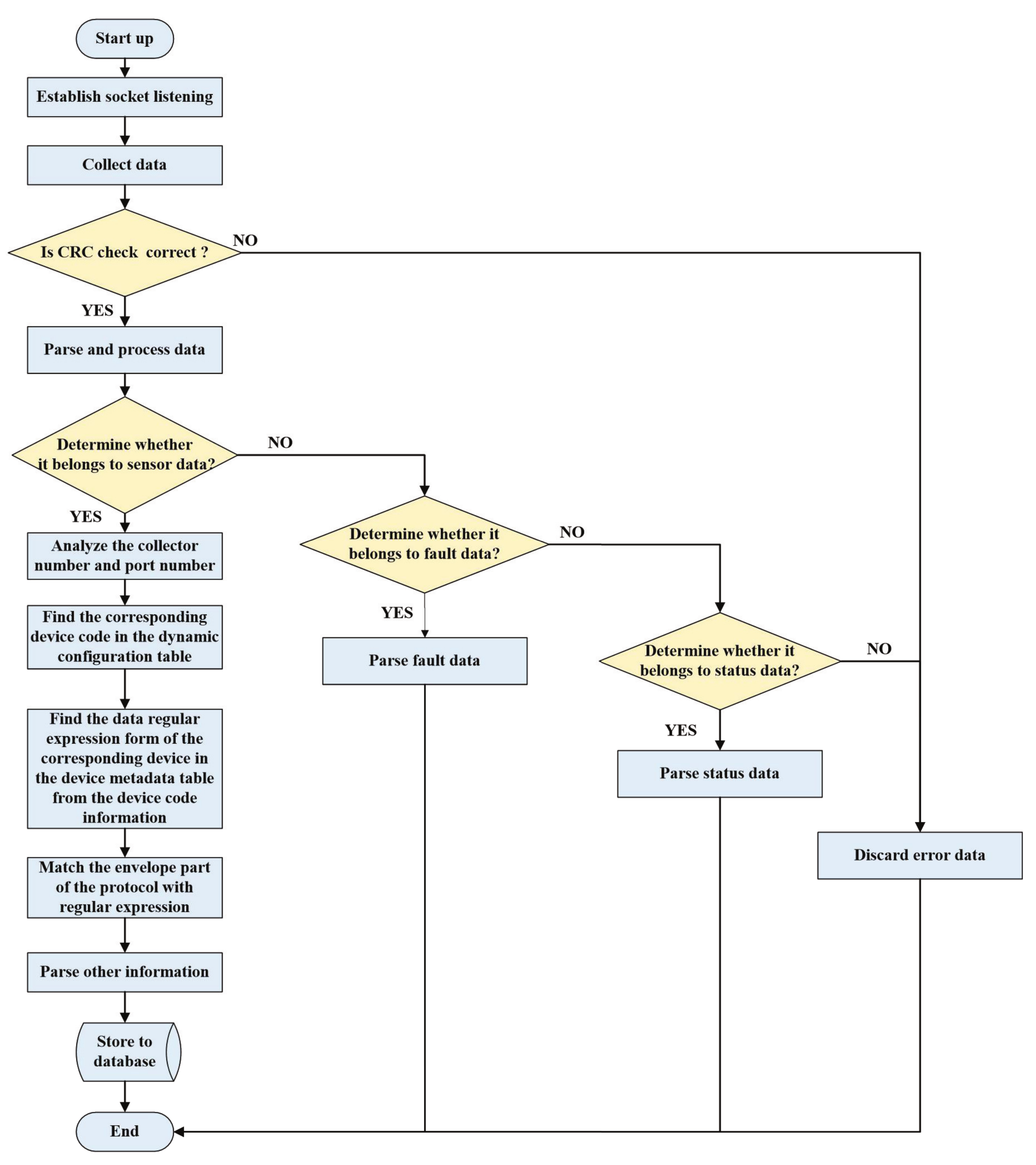
- Data processing and products: The core of SON-MS is to obtain seafloor observatory data. SON-MS must distinguish different types of data, convert source data into understandable data, and store these data in the specified database table. At the same time, SON-MS needs to carry out effective quality control on the parsed data and make the data into products for users.

3. Key Technology and Implementation
3.1. Data Communication
3.1.1. C/S Architecture and Remote Communication Mode
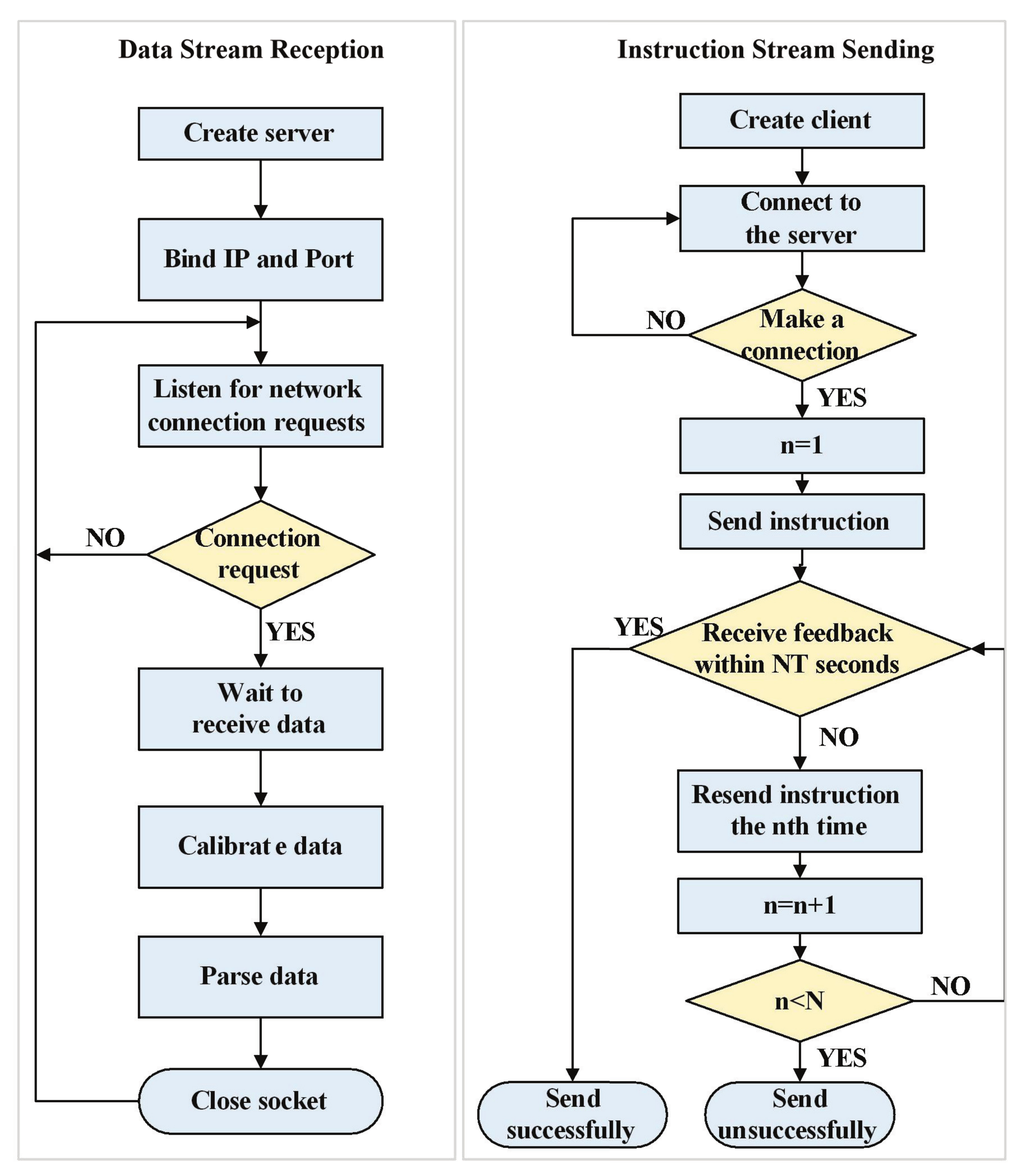
3.1.2. Bidirectional Socket Network Communication
3.1.3. The Data Stream Communication Protocol
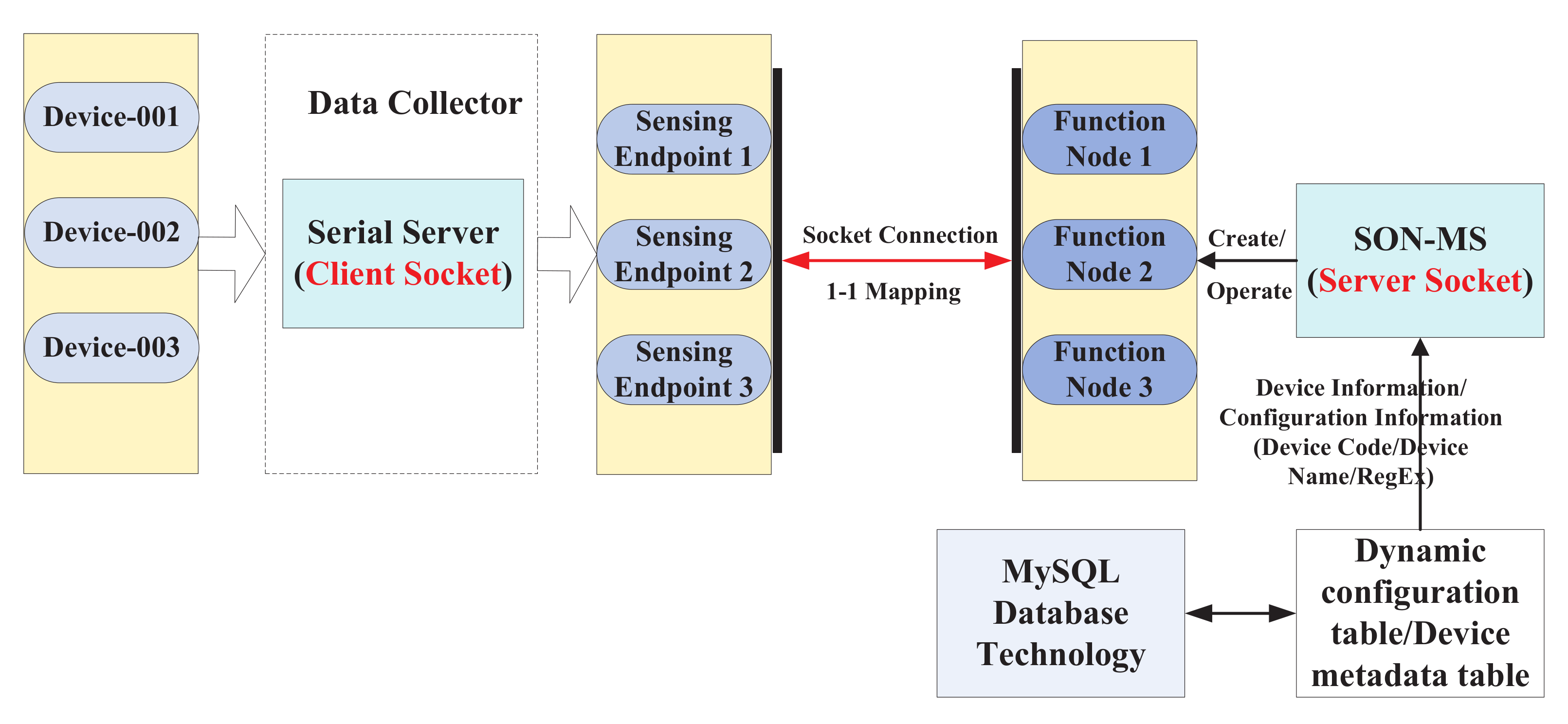
3.2. Device Dynamic Management
3.2.1. Device Object Model
3.2.2. Dynamic Management Method
3.3. Data Quality Control
- (1)
- Assume that is the online data sequence of measurement. In order to construct a new sequence from , we need to take the middle value of , , , , as . Then, is abandoned, is added and is obtained from the middle value. Follow the above steps until the last datum is added;
- (2)
- In a similar way, the middle values of the three adjacent numbers of are selected to form the sequence ;
- (3)
- Finally, is composed of the sequence as follows:It is a Hanning smoothing filter, so the method is called the 53H algorithm;
- (4)
- If the following formula is satisfied, replaces :where k is a predetermined value.It can be seen from the operation steps that the first four points and the last four points of sequence cannot be effectively smoothed. Therefore, this paper improves this algorithm as follows;
- (5)
- The sequence is generated by arranging the eight points at the beginning and the eight points at the end of the sequence in reverse order. The new sequence is as follows: , , , , , , , , , …, , , , , , , , , ;
- (6)
- A new sequence is formed by repeating the first four steps for the sequence. Substitute , , , , , , , for , , , , , , , , respectively.
4. Experiment Result and Analysis
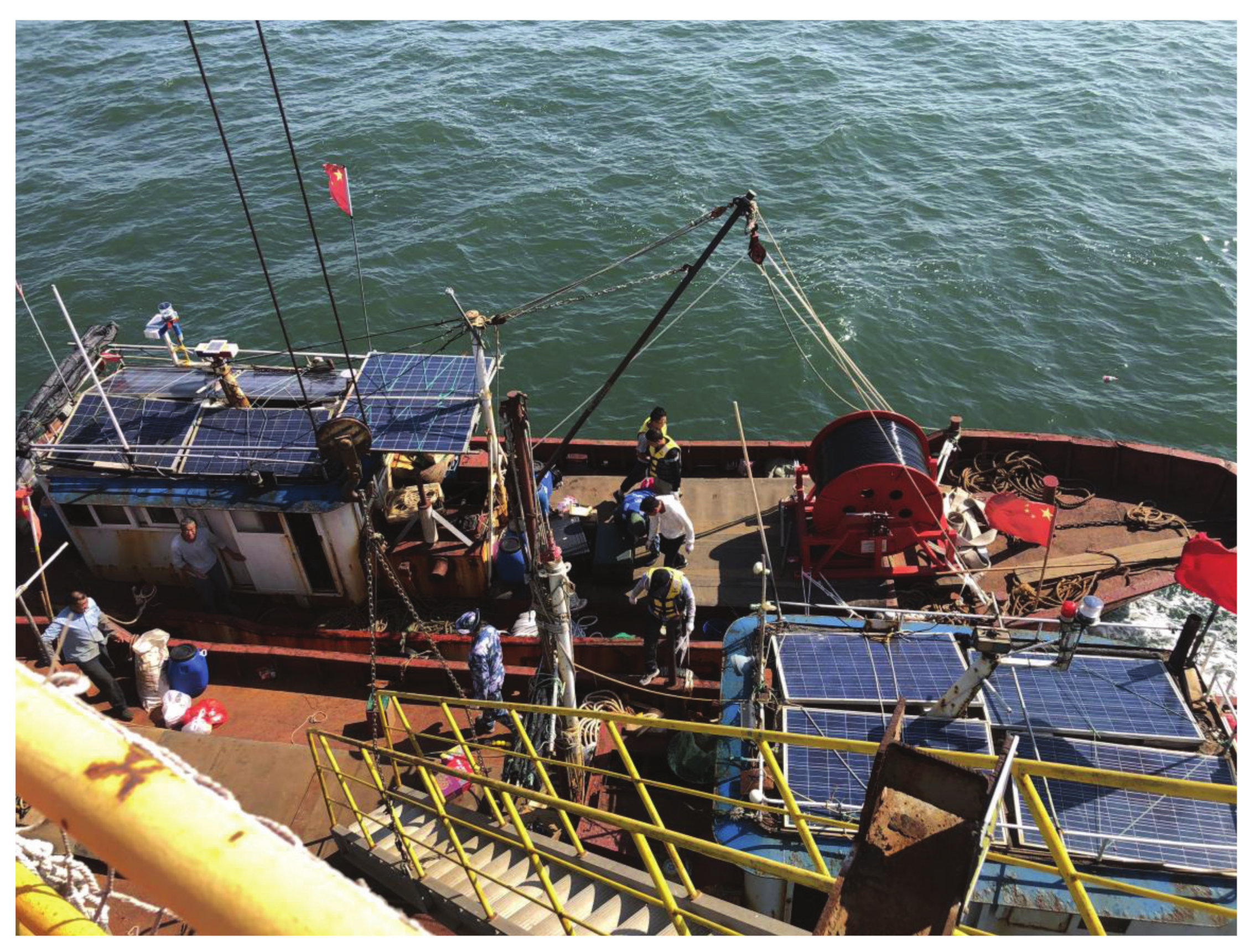
4.1. Experiment Scenario
4.2. Experiment Results and Analysis
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SON-MS | The monitoring system of the seafloor observatory system |
| DMAS | The data management system of VENUS and NEPTUNE |
| Device object model | |
| Device resource objects | |
| Device characteristics | |
| Device operations | |
| Device identification metadata | |
| Device capability metadata | |
| Device access metadata | |
| Device command metadata | |
| Device processing metadata |
References
- Qin, M.; Wang, X.; Du, Y.; Wan, X. Influencing factors of spatial variation of national marine ranching in China. Ocean Coast. Manag. 2021, 199, 105407. [Google Scholar] [CrossRef]
- Yu, J.; Wang, D.; Chen, P. Progress of Marine Ranching Technologies in China. IOP Conf. Ser. Earth Environ. Sci. 2020, 598, 012035. [Google Scholar] [CrossRef]
- Glaviano, F.; Esposito, R.; Cosmo, A.D.; Esposito, F.; Gerevini, L.; Ria, A.; Molinara, M.; Bruschi, P.; Costantini, M.; Zupo, V. Management and Sustainable Exploitation of Marine Environments through Smart Monitoring and Automation. J. Mar. Sci. Eng. 2022, 10, 297. [Google Scholar] [CrossRef]
- Aguzzi, J.; Chatzievangelou, D.; Company, J.B.; Thomsen, L.; Gaughan, P. The potential of video imagery from worldwide cabled observatory networks to provide information supporting fish-stock and biodiversity assessment. Ices J. Mar. Sci. 2020, 77, 2396–2410. [Google Scholar] [CrossRef]
- Forrester, N.C.; Stokey, R.P.; Alt, C.V.; Allen, B.G.; Goldsborough, R.G.; Purcell, M.J.; Austin, T.C. The LEO-15 Long-term Ecosystem Observatory: Design and installation. In Proceedings of the Oceans, Halifax, NS, Canada, 6–9 October 2002; Available online: https://ieeexplore.ieee.org/document/624142 (accessed on 6 May 2022).
- Kirkwood, W.J.; Caress, D.W. Comparison of MBARI autonomous underwater mapping results for ORION monterey accelerated research system (MARS) and Neptune Canada. In Proceedings of the Underwater Technology and Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 17–20 April 2007; Available online: https://ieeexplore.ieee.org/document/4231162 (accessed on 6 May 2022).
- Smith, L.M.; Barth, J.A.; Kelley, D.S.; Plueddemann, A.; Rodero, I.; Ulses, G.A.; Vardaro, M.F.; Weller, R. The ocean observatories initiative. Oceanography 2018, 31, 16–35. [Google Scholar] [CrossRef]
- Ocean Observatories Initiative—A New Era of Oceanography. Available online: https://oceanobservatories.org/ (accessed on 6 May 2022).
- Fox, C.G.; Matsumoto, H.; Lau, T.K.A. Monitoring Pacific Ocean seismicity from an autonomous hydrophone array. J. Geophys. Res. Solid Earth 2001, 106, 4183–4206. [Google Scholar] [CrossRef]
- Petitt, R.A.; Harris, D.W.; Wooding, B.; Bailey, J.; Jolly, J.; Hobart, E.; Chave, A.D.; Duennebier, F.; Butler, R.; Bowen, A.; et al. The Hawaii-2 Observatory. IEEE J. Ocean. Eng. 2002, 27, 245–253. [Google Scholar] [CrossRef]
- Ocean Networks Canada. Available online: https://www.oceannetworks.ca/ (accessed on 6 May 2022).
- Hendricks, B.; Wray, J.L.; Keen, E.M.; Alidina, H.M.; Gulliver, T.A.; Picard, C.R. Automated localization of whales in coastal fjords. J. Acoust. Soc. Am. 2019, 146, 4672–4686. [Google Scholar] [CrossRef] [PubMed]
- EMSO—Observing the Ocean to Save the Earth. Available online: http://emso.eu/ (accessed on 6 May 2022).
- Best, M.; Favali, P.; Beranzoli, L.; Cannat, M.; Cagatay, N.; Danobeitia, J.J.; Delory, E.; Stigter, H.D.; Ferre, B.; Gillooly, M. EMSO: A Distributed Infrastructure for Addressing Geohazards and Global Ocean Change. Oceanography 2014, 27, 167–169. [Google Scholar] [CrossRef]
- DONET System Concept. Available online: https://www.jamstec.go.jp/donet/e/ (accessed on 6 May 2022).
- Nosov, M.; Karpov, V.; Sementsov, K.; Kolesov, S.; Kaneda, Y. Approbation of the Method for Examining the Performance of Seafloor Observatory Sensors Using Distant Earthquakes Records. Front. Earth Sci. 2021, 9, 661337. [Google Scholar] [CrossRef]
- Yu, Y.; Xu, H.; Xu, C. An Object Model for Seafloor Observatory Sensor Control in the East China Sea. J. Mar. Sci. Eng. 2020, 8, 716. [Google Scholar] [CrossRef]
- Wang, H.; Yang, W.; Xin, Y.; Zhang, S. A Data Management Method for Remote and Long-Term Seafloor Observation System. Mar. Geod. 2020, 43, 1–22. [Google Scholar] [CrossRef]
- O’Reilly, T.C.; Headley, K.; Graybeal, J.; Gomes, K.J.; Chase, A. MBARI Technology for Self-Configuring Interoperable Ocean Observatories. In Proceedings of the Oceans, Boston, MA, USA, 18–21 September 2006; Available online: https://ieeexplore.ieee.org/document/4099048 (accessed on 6 May 2022).
- Pirenne, B.; Guillemot, E. The data management system for the VENUS and NEPTUNE cabled observatories. In Proceedings of the OCEANS 2009—EUROPE, Bremen, Germany, 11–14 May 2009; Available online: https://ieeexplore.ieee.org/document/5278187 (accessed on 6 May 2022).
- Tunnicliffe, V.; Barnes, C.R.; Dewey, R. Major Advances in Cabled Ocean Observatories (VENUS and NEPTUNE Canada) in Coastal and Deep Sea Settings. 2008. Available online: https://ieeexplore.ieee.org/abstract/document/4625496 (accessed on 6 May 2022).
- Barnes, C.R.; Best, M.; Johnson, F.R.; Pautet, L.; Pirenne, B. Challenges, benefits and opportunities in operating cabled ocean observatories: Perspectives from NEPTUNE Canada. In Proceedings of the Underwater Technology (UT), 2011 IEEE Symposium on and 2011 Workshop on Scientific Use of Submarine Cables and Related Technologies (SSC), Tokyo, Japan, 5–8 April 2013; Available online: https://ieeexplore.ieee.org/document/6313934 (accessed on 6 May 2022).
- Sun, K.; Li, Z.; Wang, X.; Li, M. Design and operation testing on the seabed of the data acquisition and management system of ocean cabled observatories. In Proceedings of the OCEANS 2014-TAIPEI, Taipei, Taiwan, 7–10 April 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Yu, Y.; Xu, H.; Xu, C. A Sensor Control Model for Cabled Seafloor Observatories in the East China Sea. Sensors 2018, 18, 3027. [Google Scholar] [CrossRef] [PubMed]
- Swa, B.; Zza, B.; Pw, A.; Yta, B. Failure Warning of Gearbox for Wind Turbine Based on 3σ-Median Criterion and NSET—ScienceDirect. 2021. Available online: https://www.sciencedirect.com/science/article/pii/S2352484721009549 (accessed on 8 May 2022).
- Clarke, G.S.; Robinson, M.L. A basic program to determine outliers in biopharmaceutical analysis using the Nair criterion. J. Pharm. Biomed. Anal. 1988, 6, 317–319. [Google Scholar] [CrossRef]
- Wang, P.; Xiang, M.; Lei, R. Research on Multi-Sensor Data Fusion Algorithm for Monitoring of Power Distribution Station. In Smart Communications, Intelligent Algorithms and Interactive Methods; Springer: Singapore, 2022. [Google Scholar] [CrossRef]
- Alkarkhi, A. Chi-square test for one sample variance—ScienceDirect. Appl. Hypothesis Test. Environ. Sci. 2021, 2021, 63–78. [Google Scholar] [CrossRef]
- Saeidian, J.; Sarfraz, M.; Azizi, A.; Jalilian, S. A New Approach of Constrained Interpolation Based on Cubic Hermite Splines. J. Math. 2021, 2021, 1–10. [Google Scholar] [CrossRef]
- Massart, D.L.; Kaufman, L.; Rousseeuw, P.J.; Leroy, A. Least median of squares: A robust method for outlier and model error detection in regression and calibration. Anal. Chim. Acta 1986, 187, 171–179. [Google Scholar] [CrossRef]
- Patel, A.; Khatua, K. Reliability Study in Despiking of ADV Data to Open Channel Flow. 2017. Available online: http://dspace.nitrkl.ac.in/dspace/bitstream/2080/2874/1/2017_HYDRO_APatel_Reliability.pdf (accessed on 8 May 2022).
- Goring, D.G.; Nikora, V.I. Despiking Acoustic Doppler Velocimeter Data. J. Hydraul. Eng. 2002, 128, 117–126. [Google Scholar] [CrossRef]
- Bushnell, M.; Waldmann, C.; Seitz, S.; Buckley, E.; Lara-Lopez, A. Quality Assurance of Oceanographic Observations: Standards and Guidance Adopted by an International Partnership. Front. Mar. Sci. 2019, 6, 706. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Numb | Field Name | Type | Length | Remarks |
|---|---|---|---|---|
| 1 | Package header | 16-bit unsigned integer | 2 byte | The beginning of a fixed protocol |
| 2 | Collector numb | 32-bit unsigned integer | 2 byte | A data collector corresponds to a unique number |
| 3 | Port numb | 32-bit unsigned integer | 2 byte | Each data collector port has a unique number |
| 4 | Time stamp | ASCII | 23 byte | The format is yyyy: mm: DD: HH: mm: ss: msms |
| 5 | Package Numb | 32-bit unsigned integer | 4 byte | Start counting at 0:00:00 every day, and add 1 automatically for each packet sent |
| 6 | Package Length | 32-bit unsigned integer | 4 byte | Length of the whole package |
| 7 | Package body | Composite format | Indefinite | The specific content is determined by the sensor |
| 8 | CRC check | 32-bit unsigned integer | 4 byte | Calculate CRC32 for the whole package |
| 9 | Terminator | 8-bit unsigned integer | 1 byte | Fixed terminator, representing the end of data |
| Metadata Set | Metadata Elements |
|---|---|
| Device name, device type, device platform, device node | |
| Device geolocation, device quality, device observation parameter, device application range | |
| Device IP, device port, communication configuration, device interface | |
| Command documentation, command configuration | |
| Observation valid time, data file, processing documentation, regular expression |
| Observatory Node | Sensor | Observatory Parameter | Sampling Interval |
|---|---|---|---|
| Laizhou Bay Marine Ranching | Dissolved oxygen sensor (SDIOI) | Dissolved oxygen concentration | 20 s |
| CTD (Dao Wan) | Conductivity, temperature, depth, salinity | 4 s | |
| Chlorophyll sensor (SDIOI) | Chlorophyll concentration | 30 s | |
| Turbidity sensor (SDIOI) | Turbidity concentration | 30 s | |
| Camera (Zhifan) | Real-time video | Continuous |
| Records | Abnormal Records | Accuracy | ||||||
|---|---|---|---|---|---|---|---|---|
| Raw Data | 53H Algorithm | Improved 53H Algorithm | Least Square Method | Raw Data | 53H Algorithm | Improved 53H Algorithm | Least Square Method | |
| 326,273 | 42 | 7 | 3 | 131 | 0.013% | 0.0021% | 0.00092% | 0.04% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Liu, H.; Lv, B.; Liu, C.; Zhang, X.; Li, H.; Cao, L.; Wan, J. Research on an Extensible Monitoring System of a Seafloor Observatory Network in Laizhou Bay. J. Mar. Sci. Eng. 2022, 10, 1051. https://doi.org/10.3390/jmse10081051
Chen J, Liu H, Lv B, Liu C, Zhang X, Li H, Cao L, Wan J. Research on an Extensible Monitoring System of a Seafloor Observatory Network in Laizhou Bay. Journal of Marine Science and Engineering. 2022; 10(8):1051. https://doi.org/10.3390/jmse10081051
Chicago/Turabian StyleChen, Jie, Hailin Liu, Bin Lv, Chao Liu, Xiaonan Zhang, Hui Li, Lin Cao, and Junhe Wan. 2022. "Research on an Extensible Monitoring System of a Seafloor Observatory Network in Laizhou Bay" Journal of Marine Science and Engineering 10, no. 8: 1051. https://doi.org/10.3390/jmse10081051
APA StyleChen, J., Liu, H., Lv, B., Liu, C., Zhang, X., Li, H., Cao, L., & Wan, J. (2022). Research on an Extensible Monitoring System of a Seafloor Observatory Network in Laizhou Bay. Journal of Marine Science and Engineering, 10(8), 1051. https://doi.org/10.3390/jmse10081051