
Research on an LEO Constellation Multi-Aircraft Collaborative Navigation Algorithm Based on a Dual-Way Asynchronous Precision Communication-Time Service Measurement System (DWAPC-TSM)


Abstract
:1. Introduction
2. Time Synchronization and Ranging Scheme Based on a Dual-Way Asynchronous Precision Communication-Time Service-Measurement System (DWAPC-TSM)
2.1. Dual-Way Asynchronous Precision Communication-Time Service-Measurement System (DWAPC-TSM) Principle and Algorithm
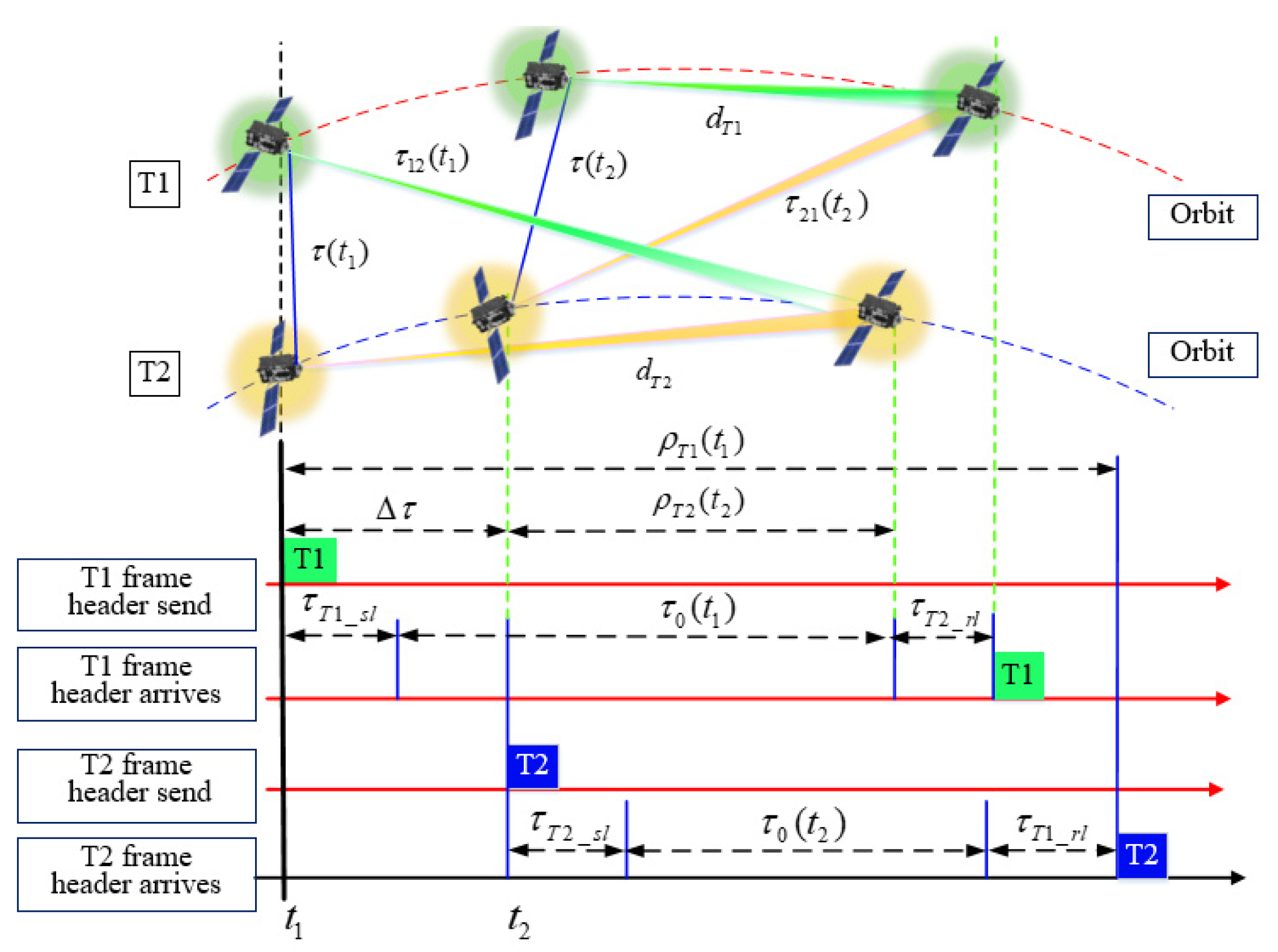
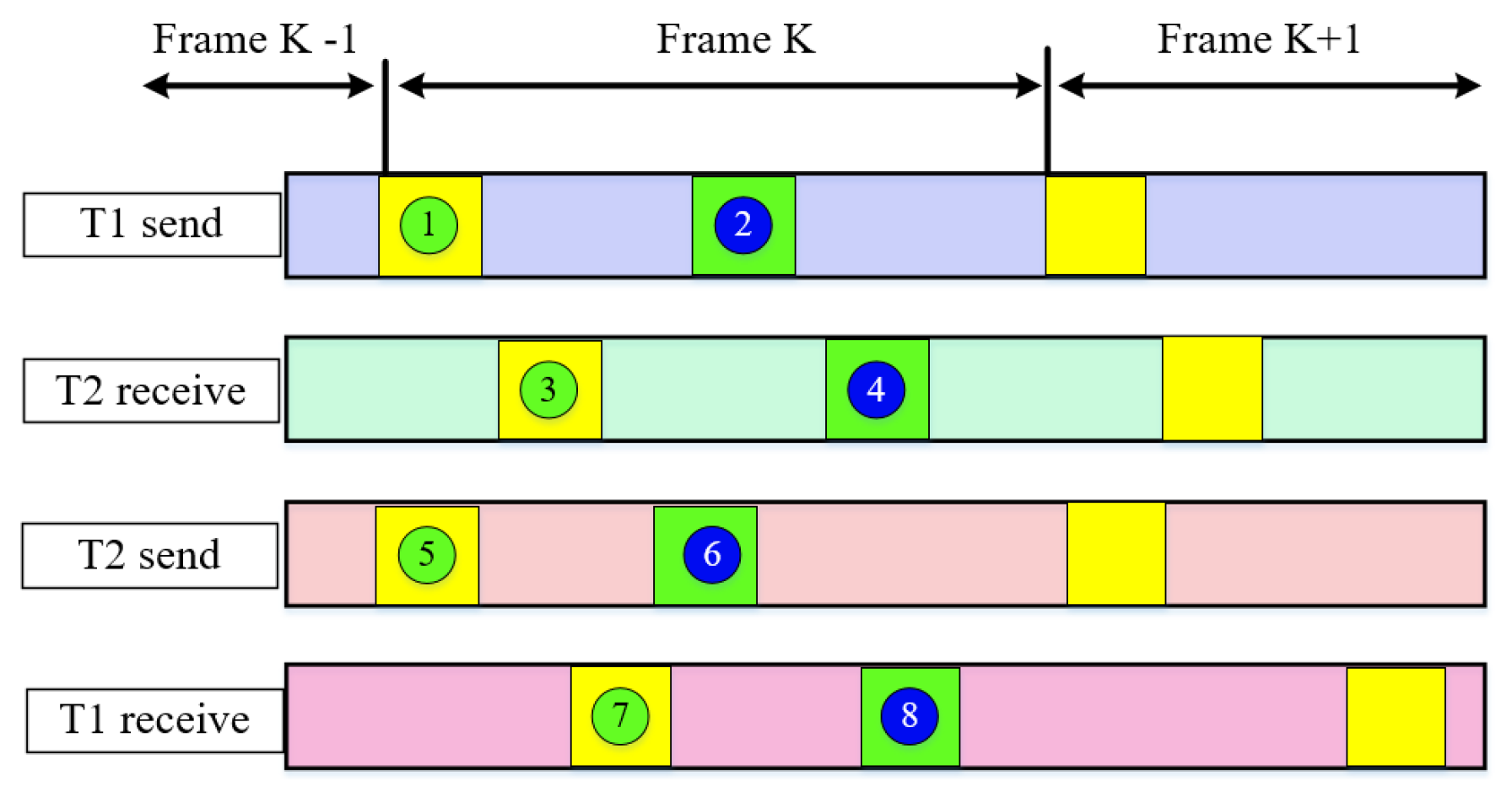
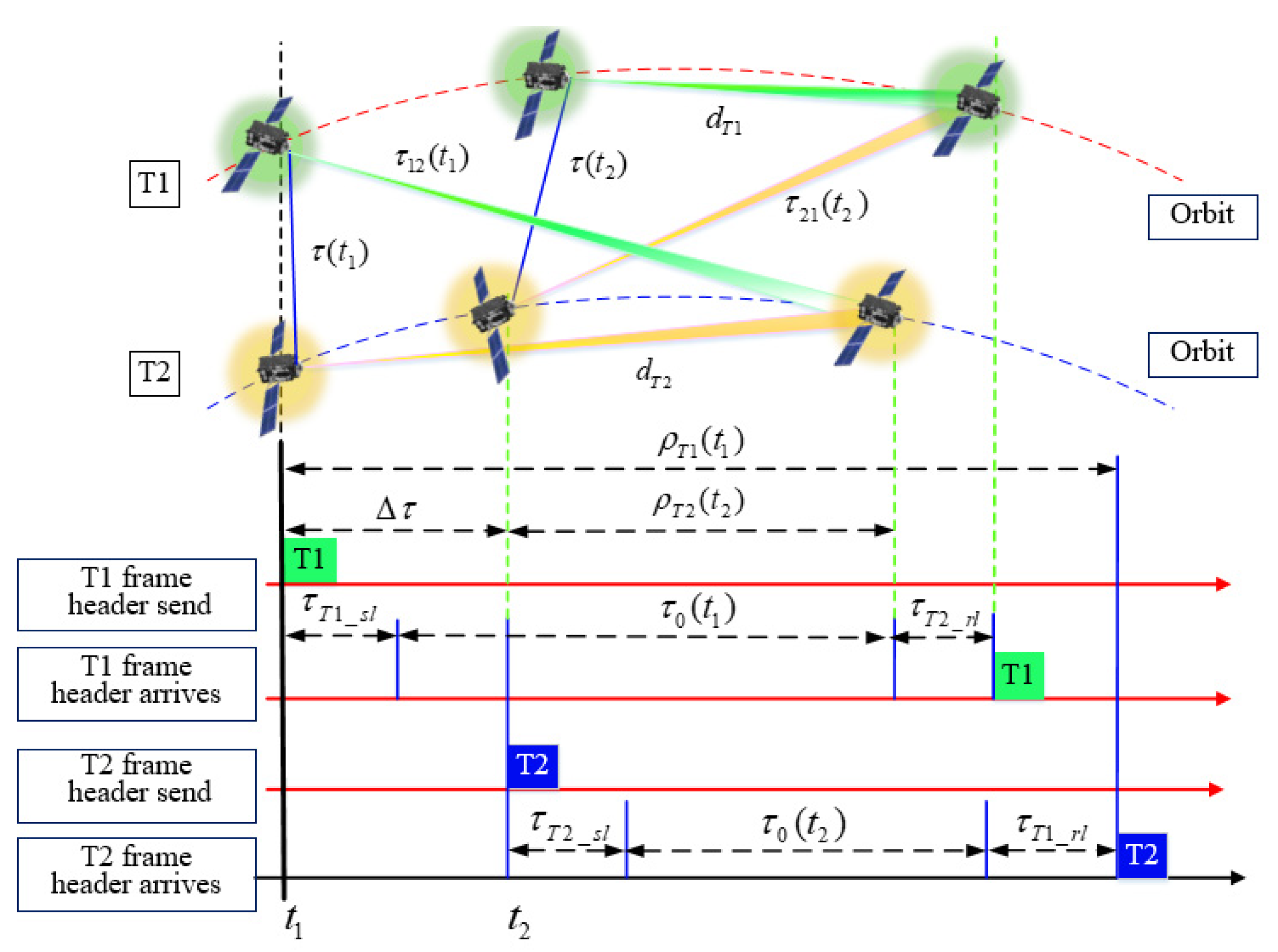
2.1.1. Principle of TWAP-BMandTS between Terminals
- (1)
- : the local pseudorange obtained by sampling the T1 DWAPC-TSM system frame header of the terminal at (which can be converted to an equivalent time value);
- (2)
- : the terminal T1 sending delay;
- (3)
- : the terminal T1 receiving delay;
- (4)
- : the transmission delay of radio waves between the antenna phase centers of terminal T1 and terminal T2 at the time of ;
- (5)
- : the calculated value of the time difference, that is, the clock bias (bias in timing) between terminals T1 and T2 at time .
- (6)
- : taking the clock of terminal T1 as a reference, the distance between terminal T1 and terminal T2 is delayed at the start of the transmission time slot of ;
- (7)
- : the spatial propagation delay for the signal transmitted by terminal T1 at time to reach terminal T2;
- (8)
- : the motion distance vector of terminal T1 within the propagation delay;
- (9)
- The meanings of (which can be converted to an equivalent time value), , , , , and are similar to the above parameter definitions, and will not be described here.
2.1.2. TWAP-BMandTS Algorithm (TWAP-BMandTS-A) Construction between Terminals
- (1)
- The relative velocity of the two terminals is small. Taking satellites and aerial vehicles as examples, the moving velocity of artificial satellites is approximately 7.9 km/s, and the moving velocity of general aircraft is usually between approximately Mach 1 and several times the speed of sound. Here, we consider km/s, that is, .
- (2)
- Using an ultra-stable crystal oscillator or atomic frequency, the accuracy/stability parameter [28];
- (3)
- is not more than one transmission frame period, and can be accurately measured and converged to 0 after time synchronization adjustment;
- (4)
- The scale of the terminal topological configuration is not too large, and the terminals are generally distributed in the range of several thousand kilometers. Here, we consider that km, that is, , and the algorithmic model error of the terminal baseline measurement, clock bias measurement, and sampling interval measurement is related to the product of and , ps @ km.
2.2. Time Synchronization and Ranging Error Analysis of TWAP-APBMandAPT-A
3. Analysis of the Multi-Aircraft Cooperative Navigation Algorithm Based on the DWAPC-TSM System
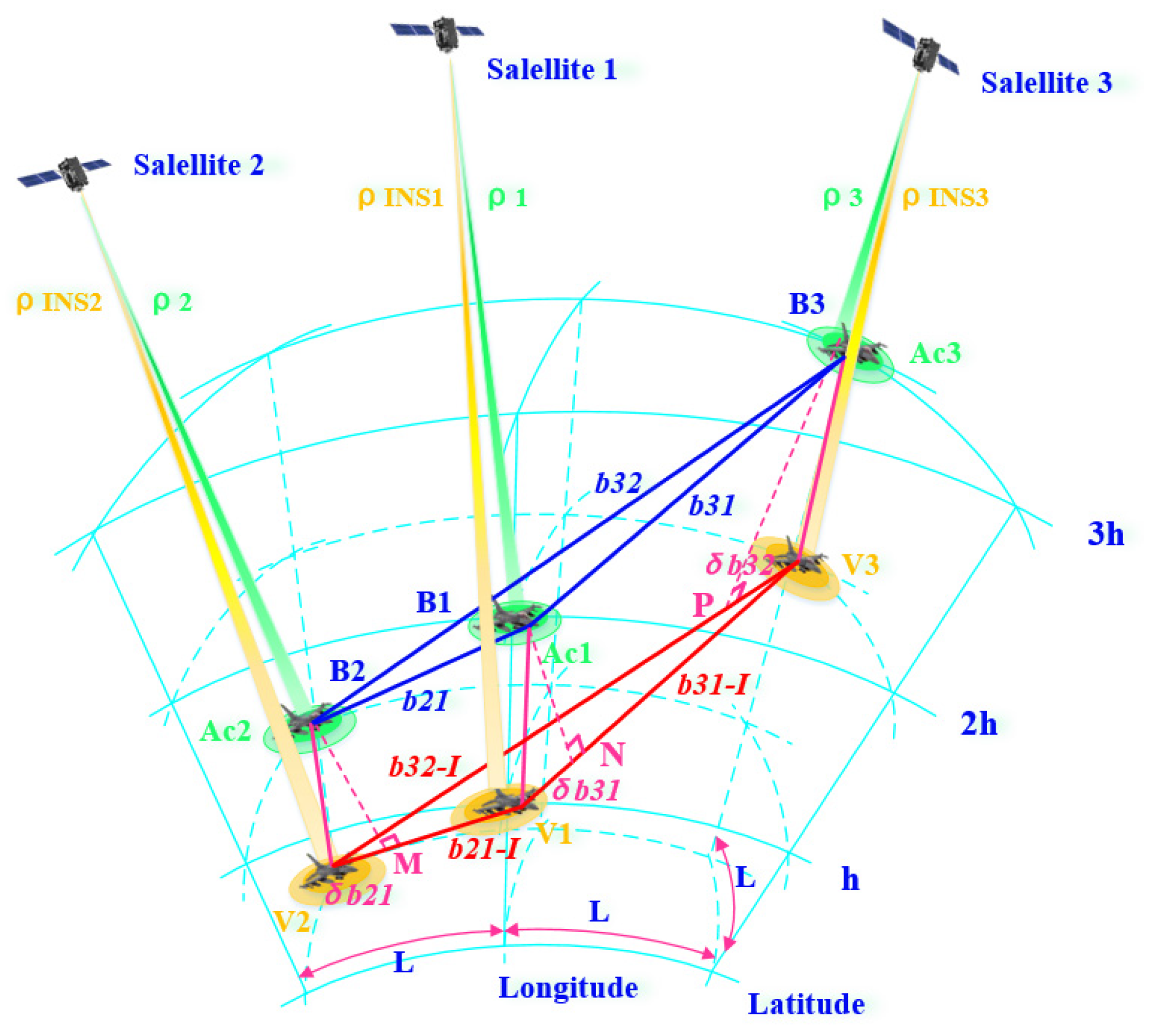
3.1. Algorithm Principle
- Scenario 1. No Altimeter Assistance Scenario
- Scenario 2. Altimeter Assist Scenario
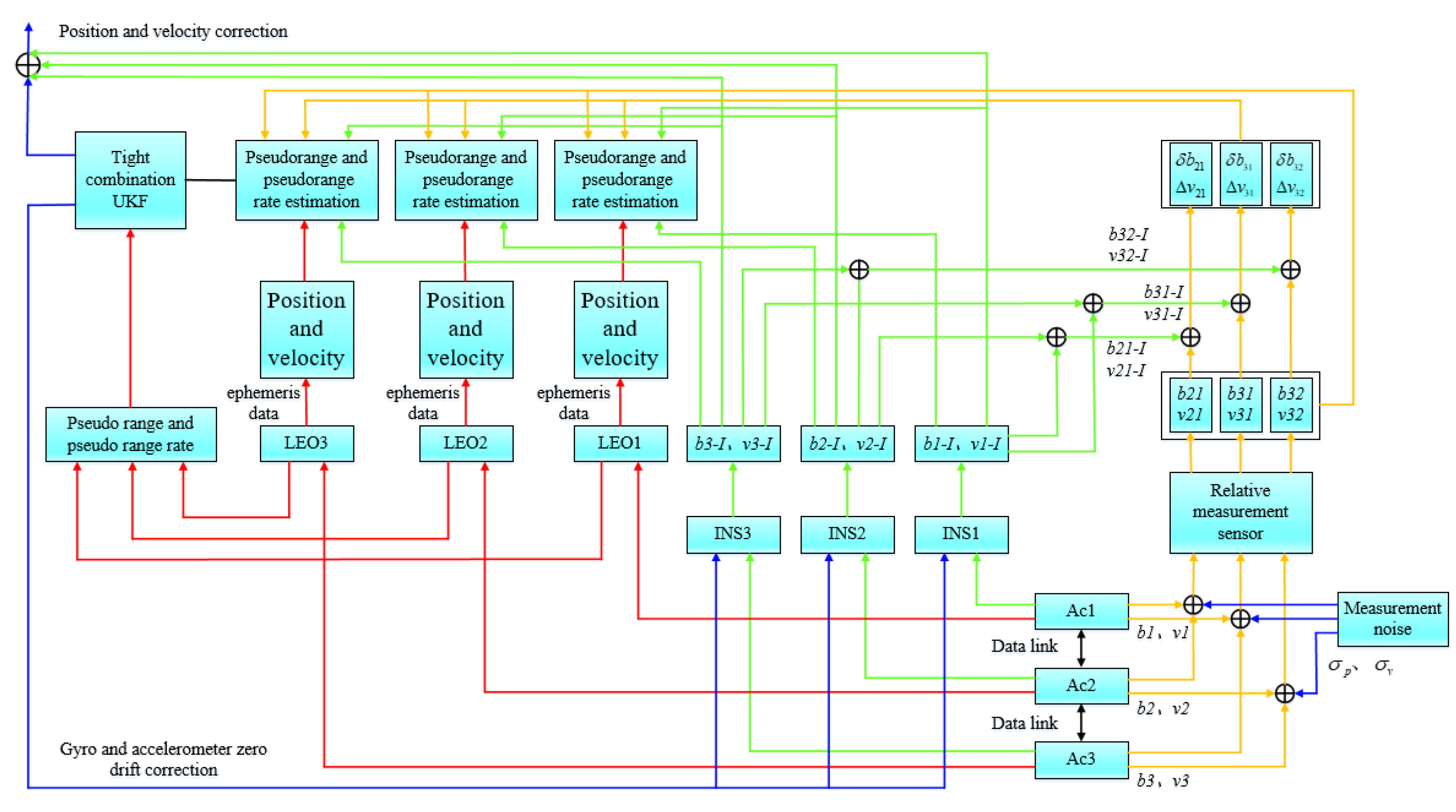
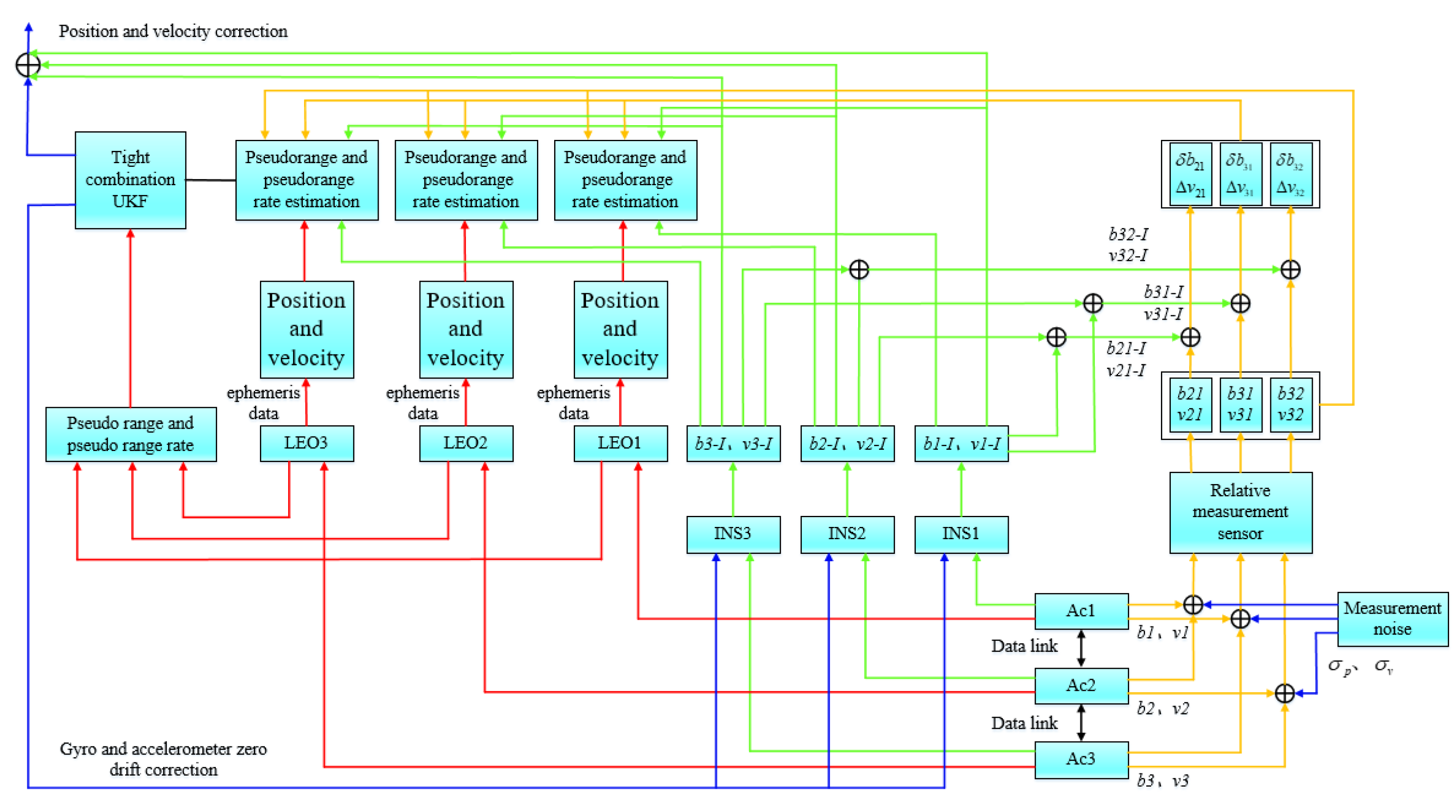
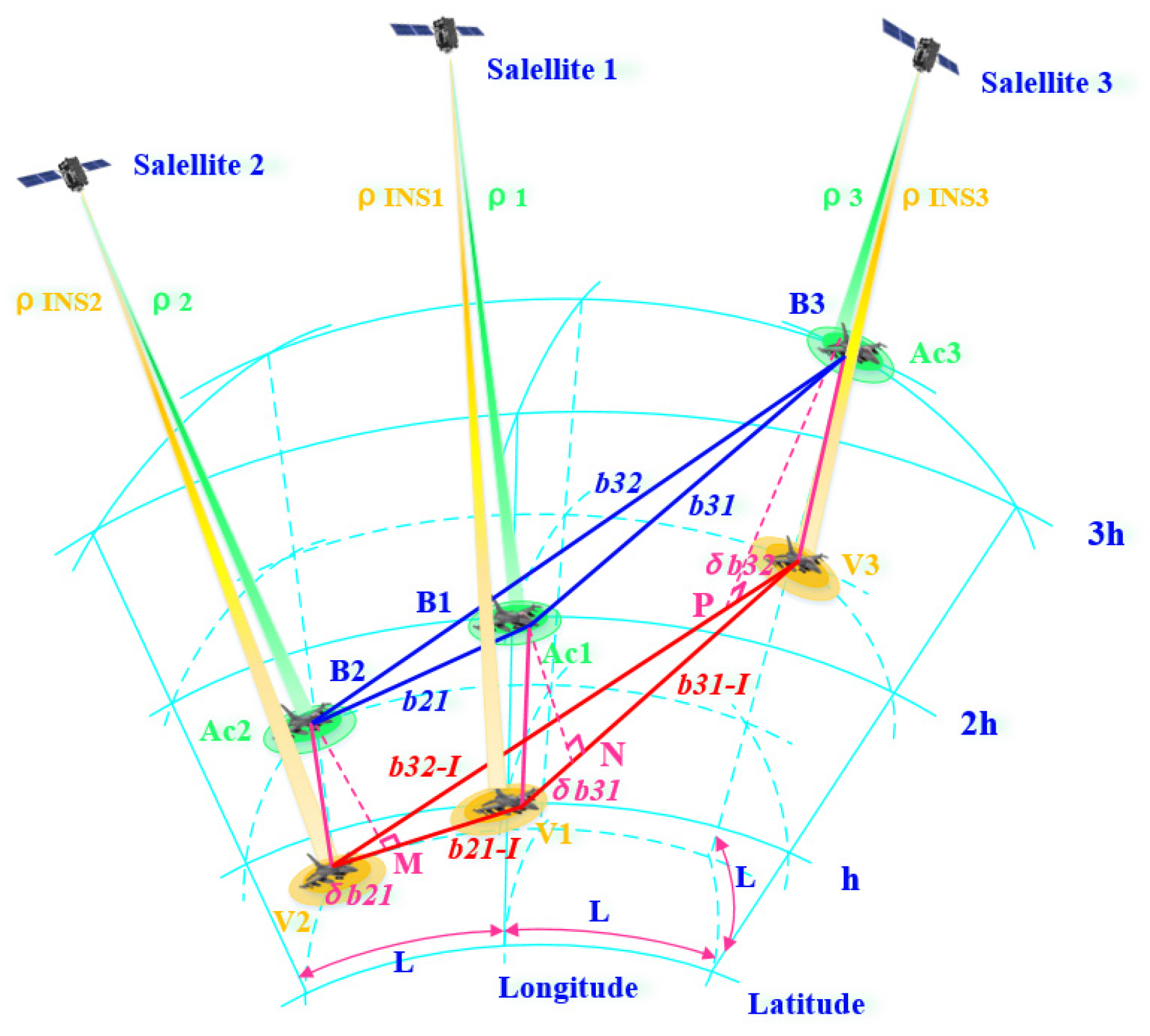
3.2. Multi-Aircraft Collaborative Navigation Combination Model Based on Tight Combination
3.2.1. State Equation
3.2.2. Observation Equation
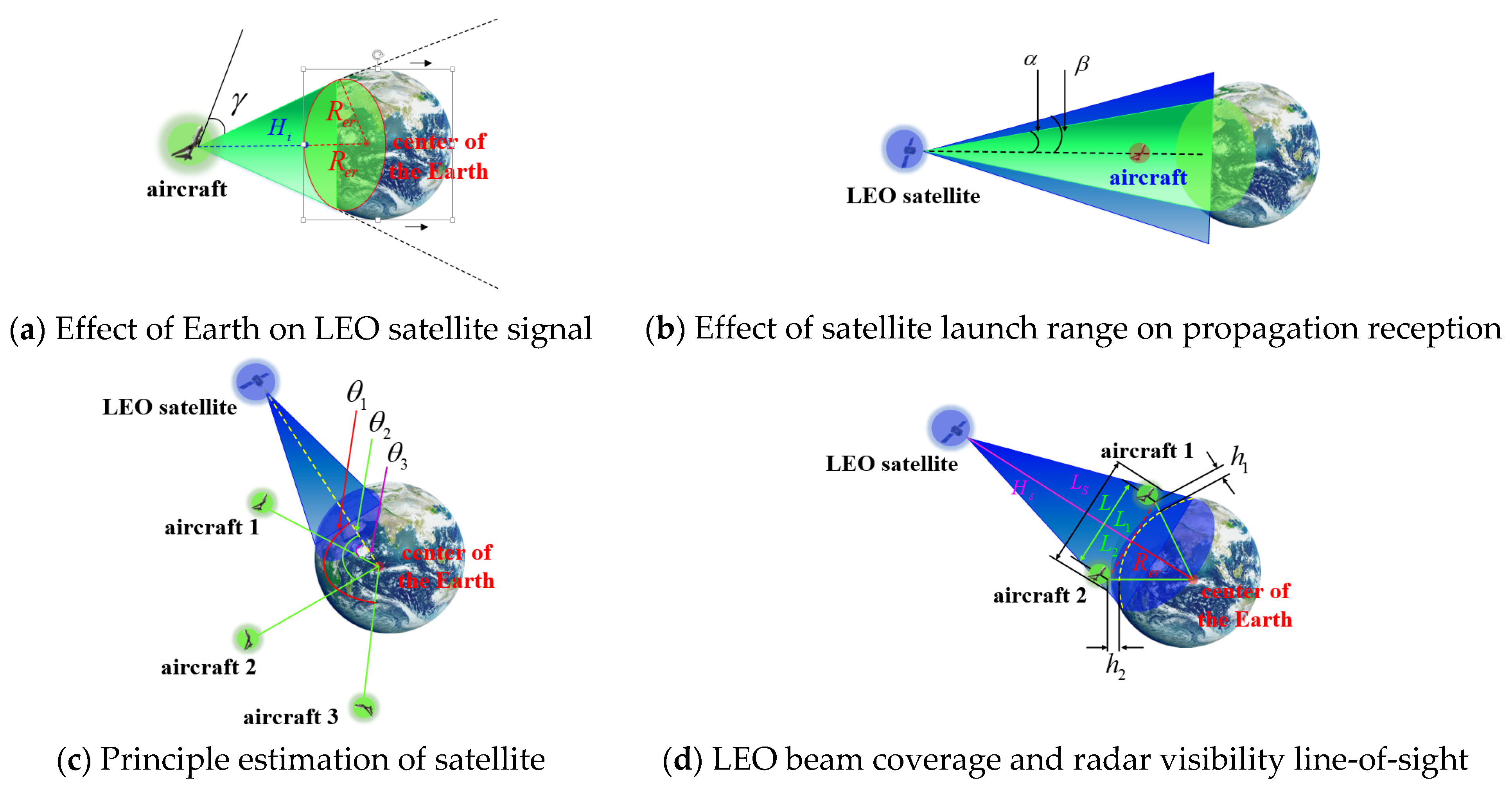
3.3. Other Models
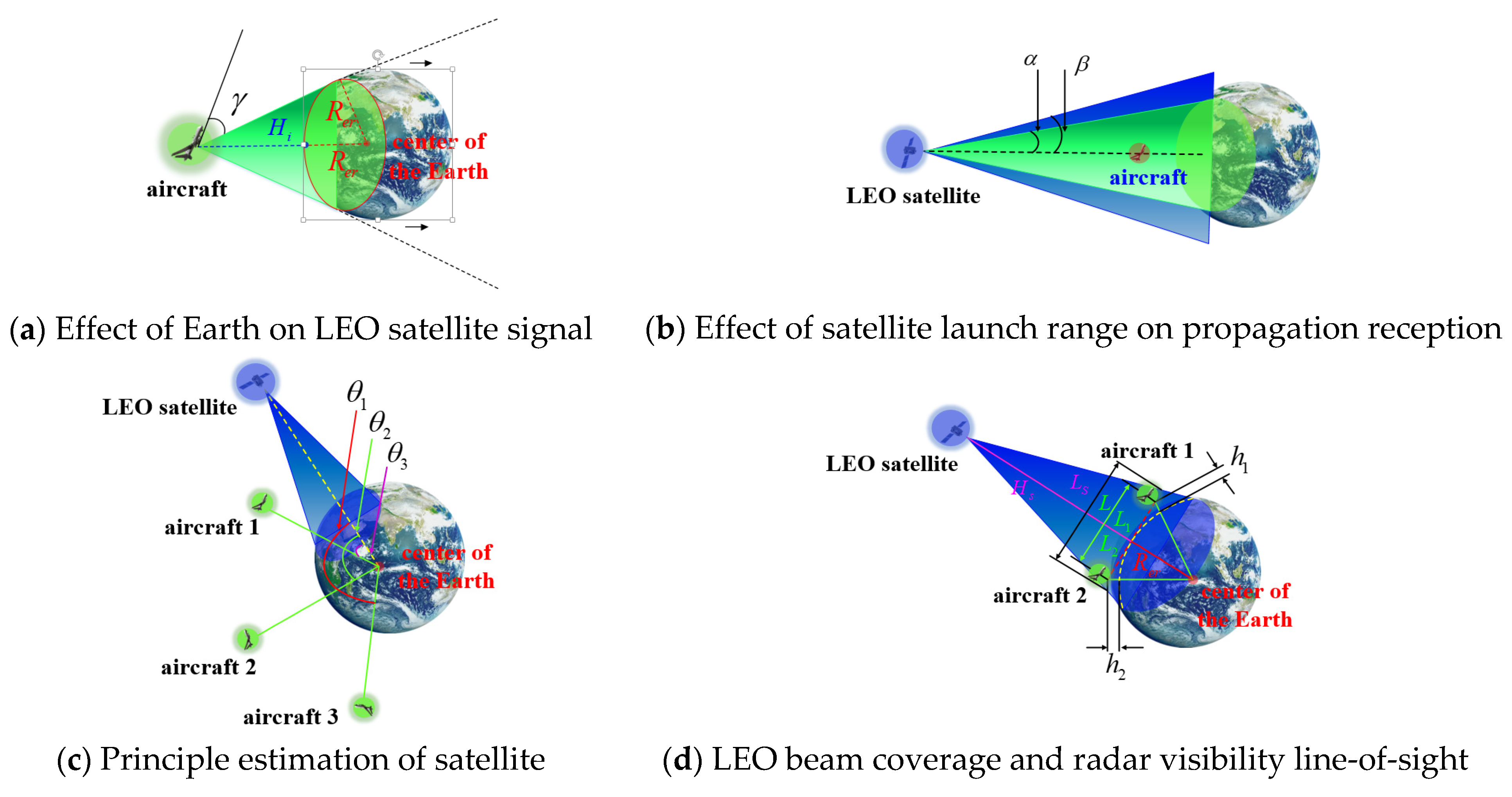
- (1)
- Influence of aircraft spacing range on satellite observability
- (2)
- Satellite selection algorithm and other models
4. Simulation Verification and Analysis
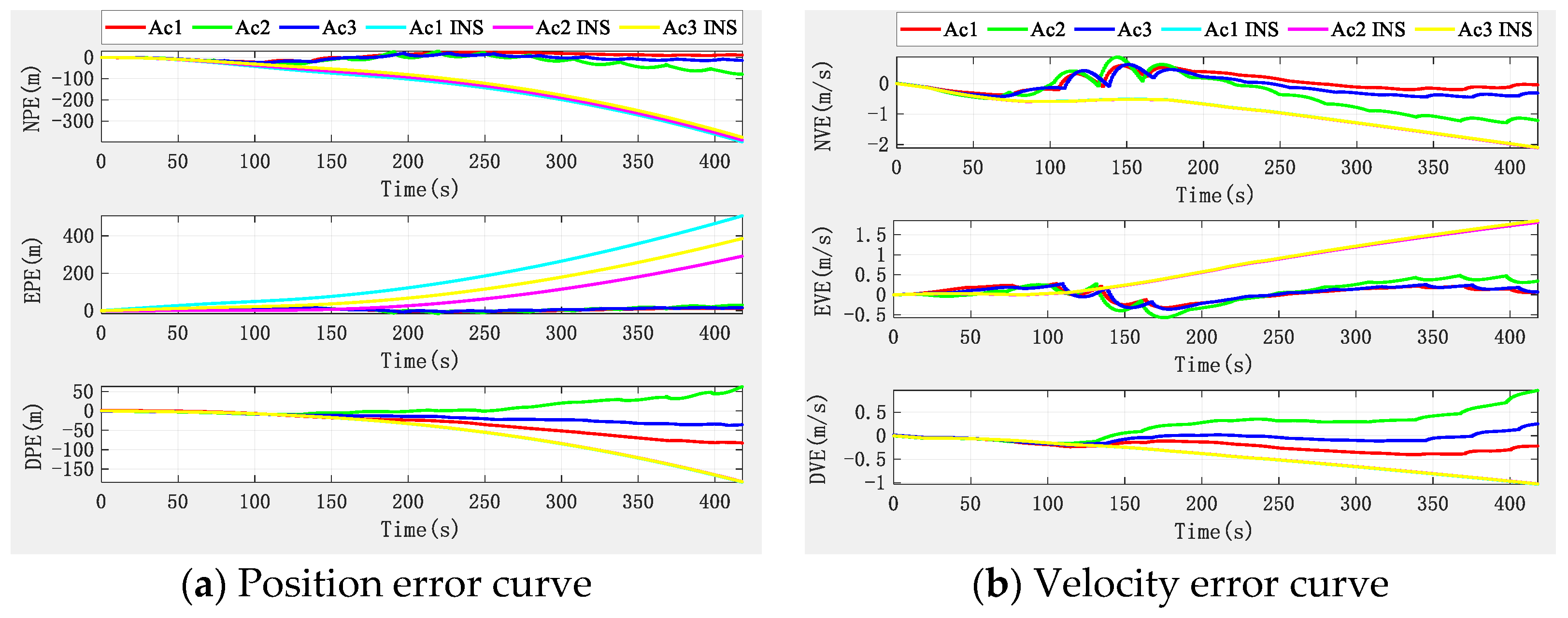
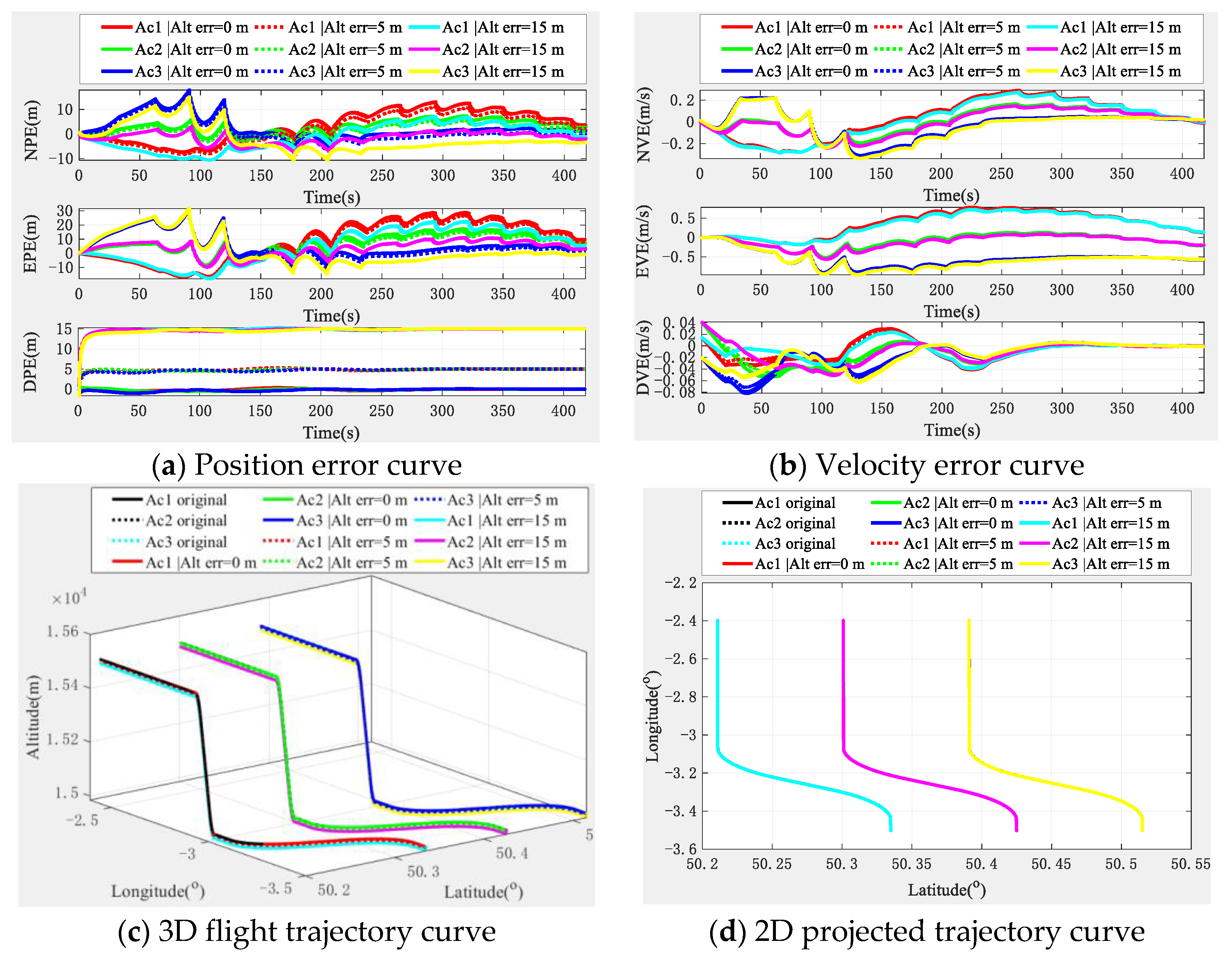
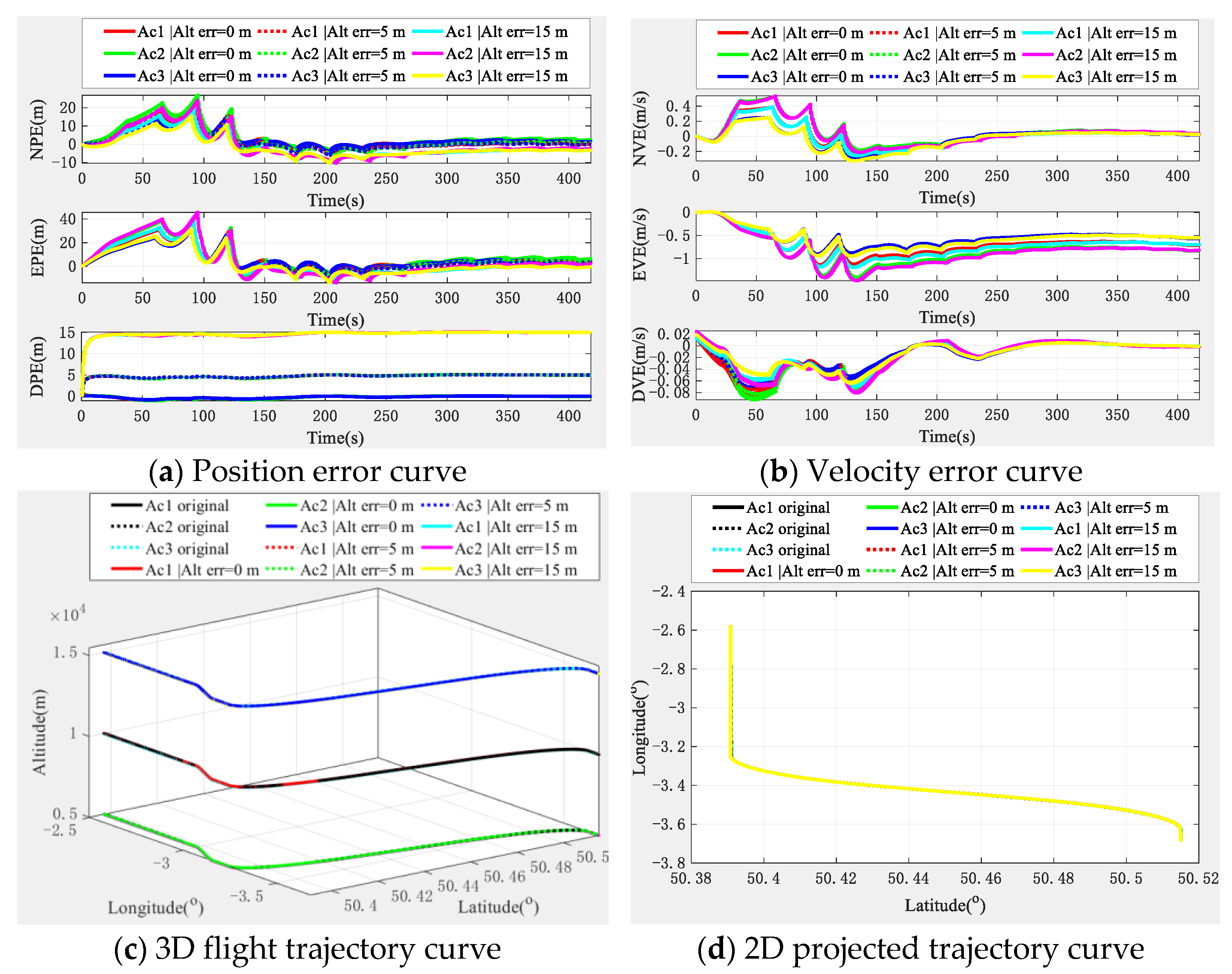
- −
- NPE: north position error;
- −
- EPE: east position error;
- −
- DPE: down position error;
- −
- NVE: north speed error;
- −
- EVE: east velocity error;
- −
- DVE: down velocity error;
- −
- Aci INS indicates the INS equipment used by the i-th aircraft;
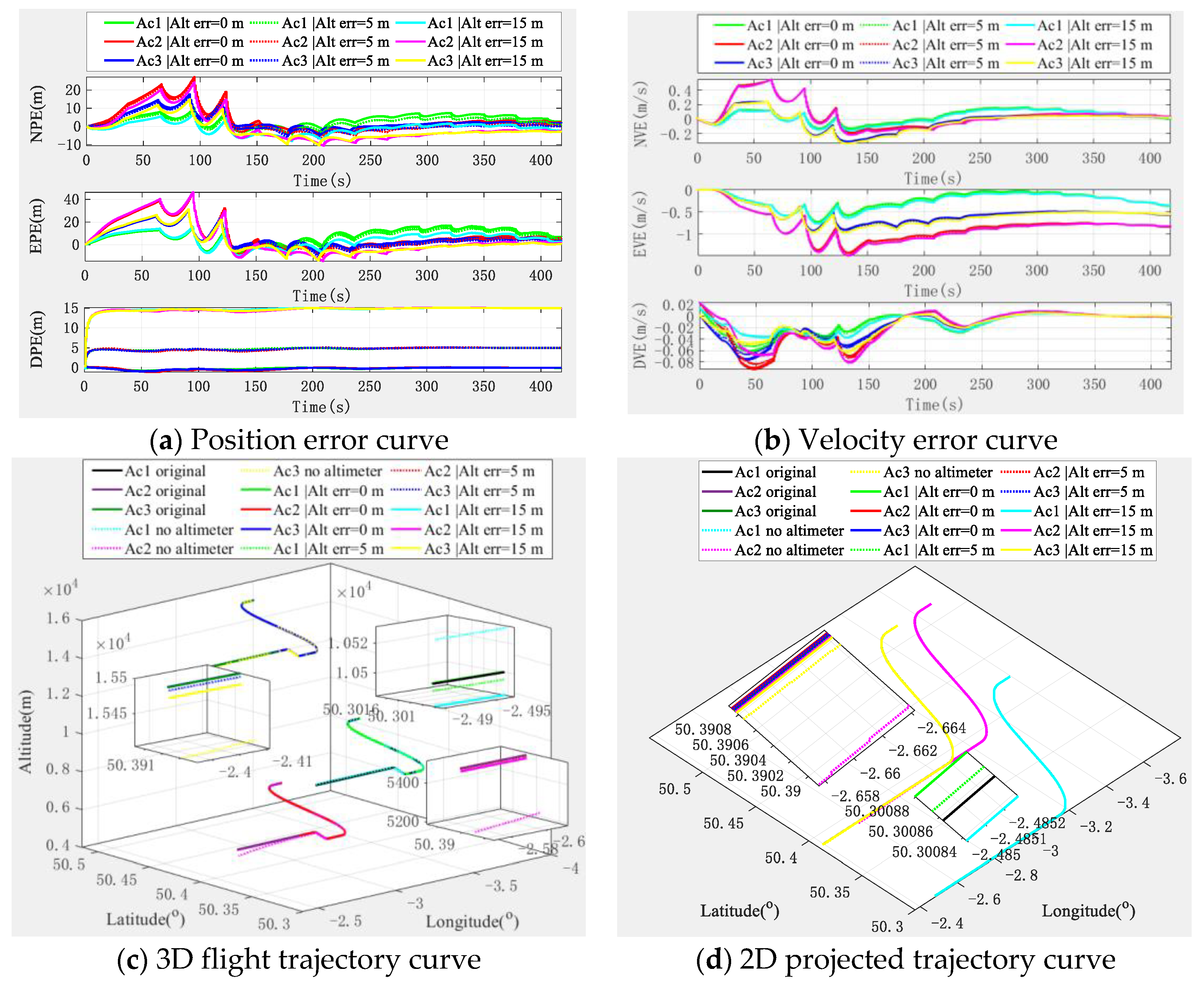
- −
- Aci|Alt = H m indicates that aircraft i is H m in the altimeter algorithm performance below, where i = 1,2,3, represents the i-th aircraft, Alt represents the altimeter, and H = 0 m, 5 m, and 15 m.
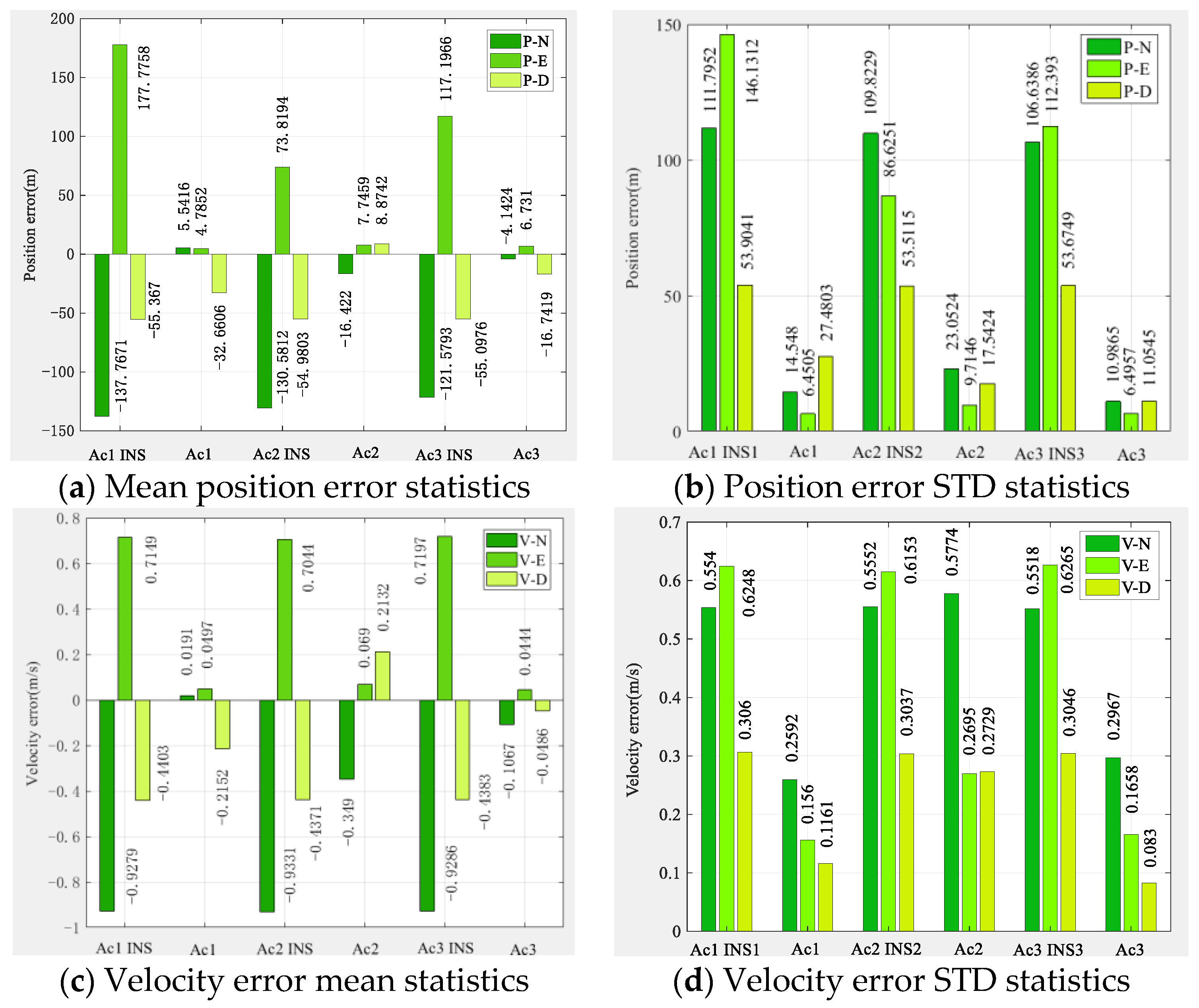
4.1. Multi-Aircraft Cooperative Navigation and Positioning Algorithm without Altimeter Assistance
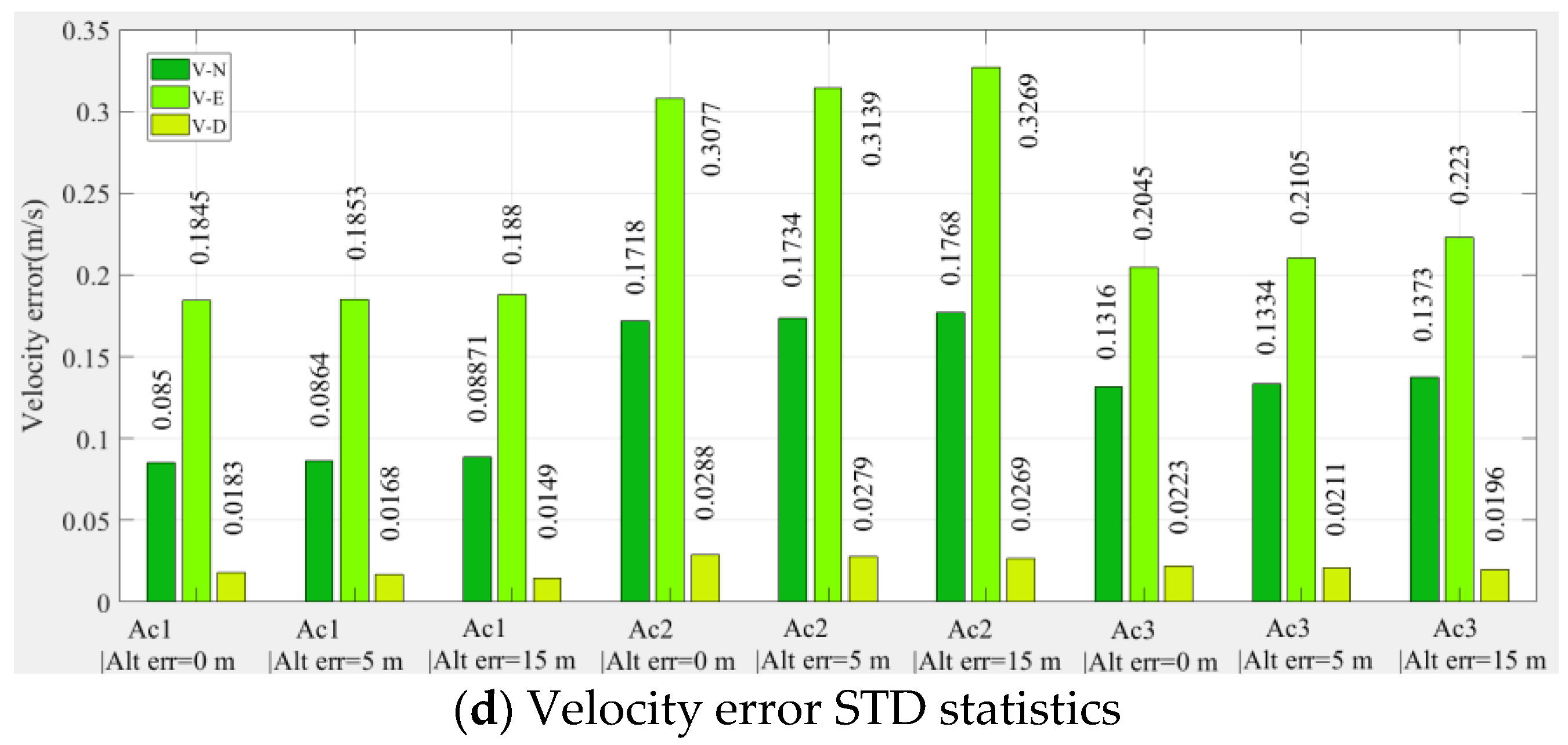
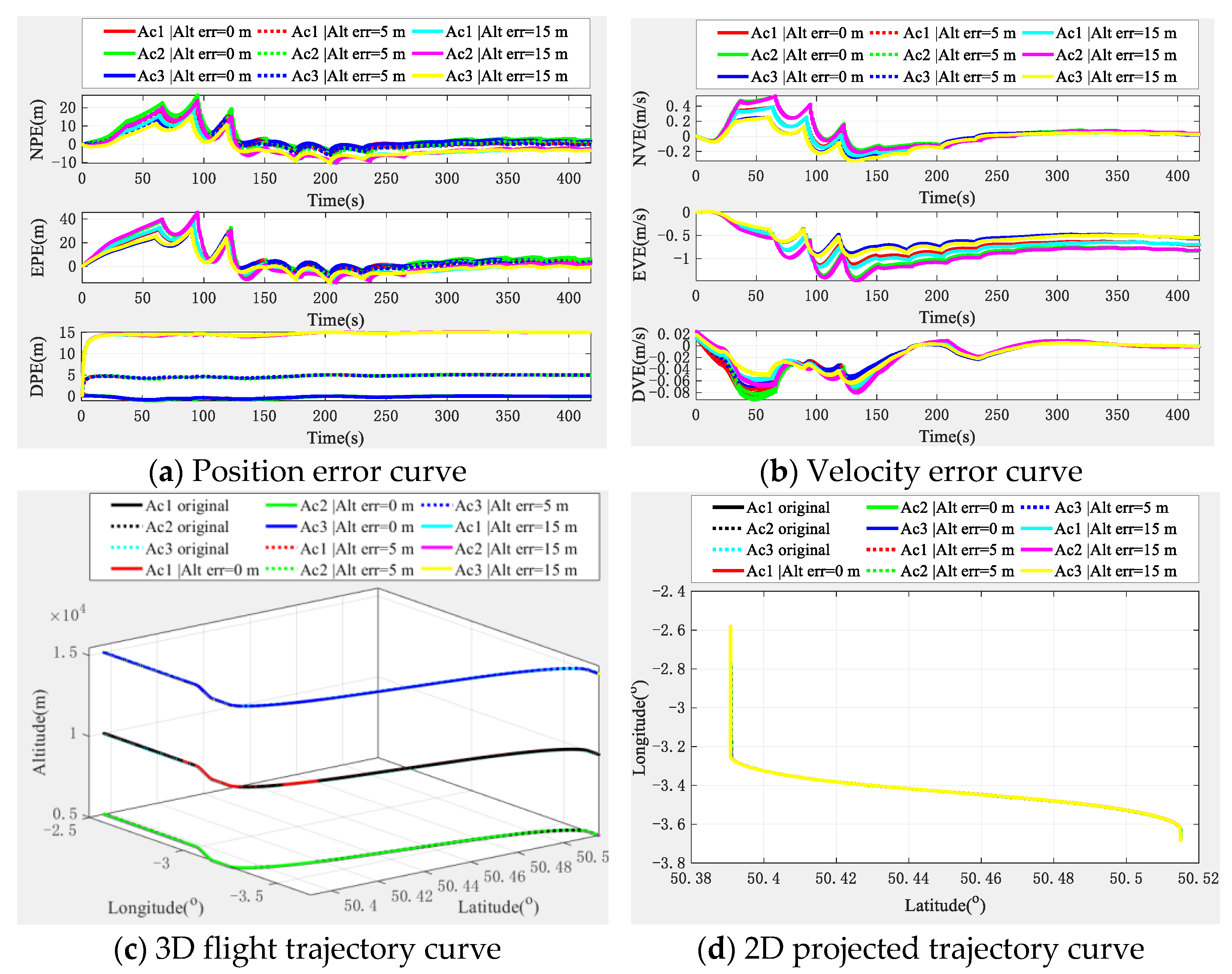
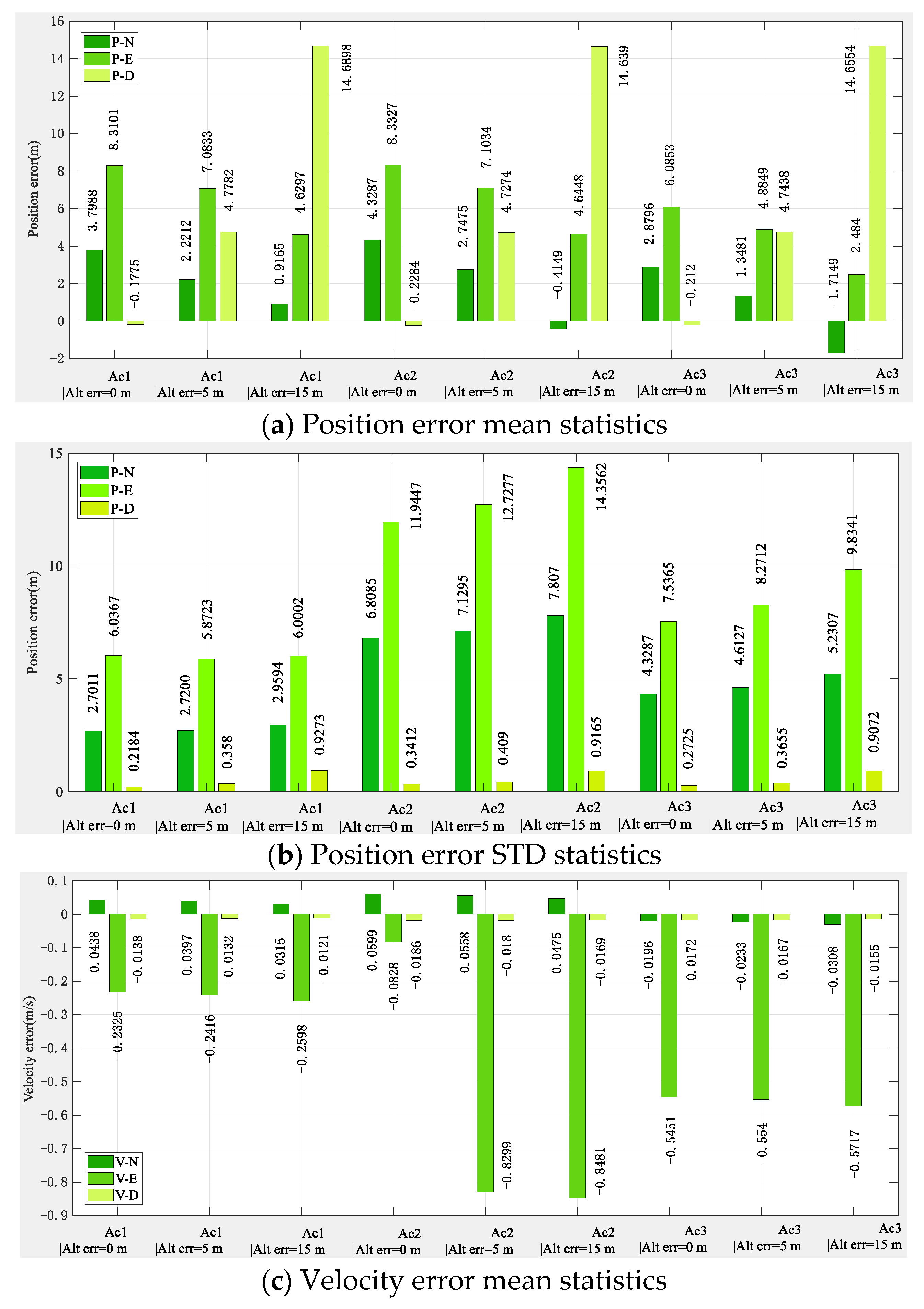
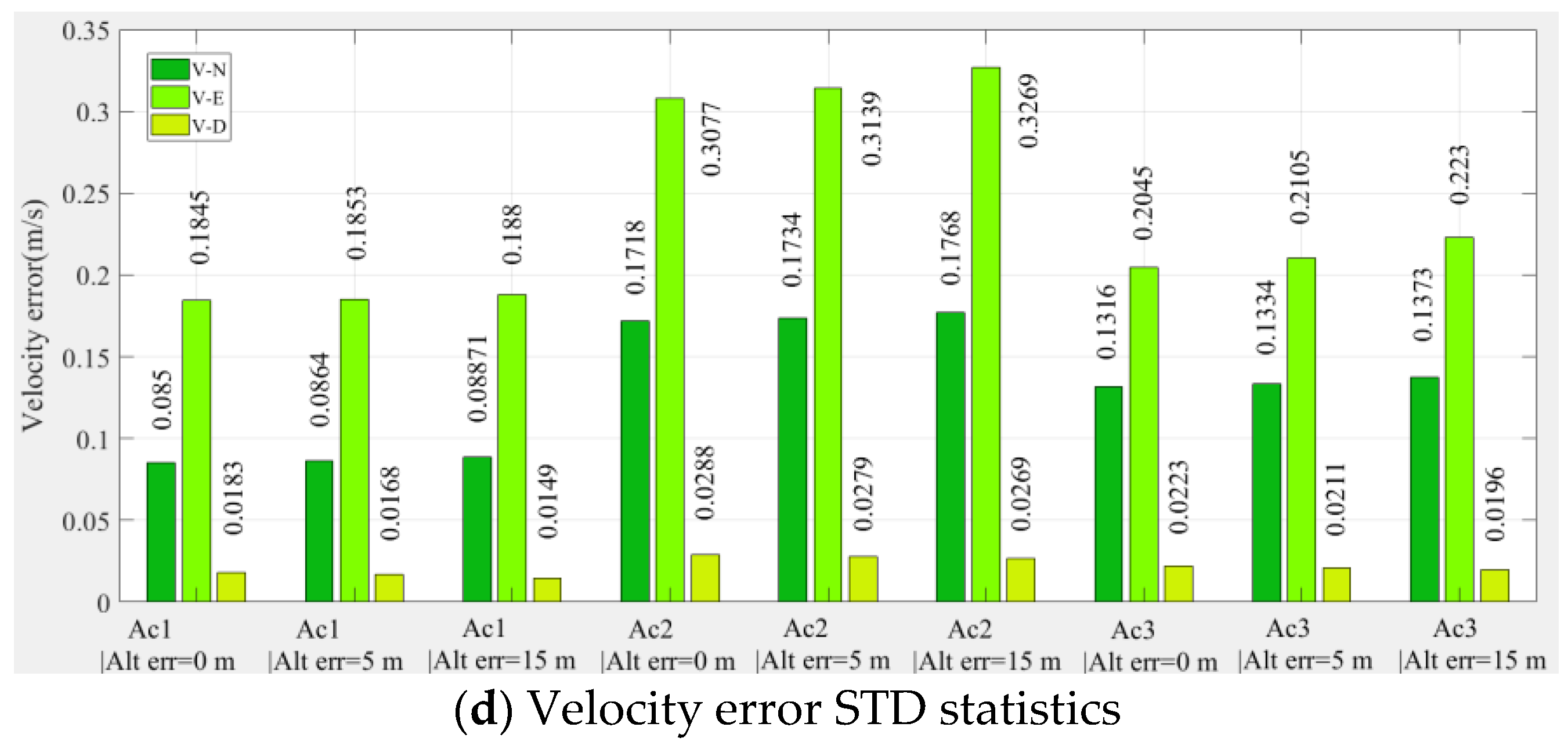
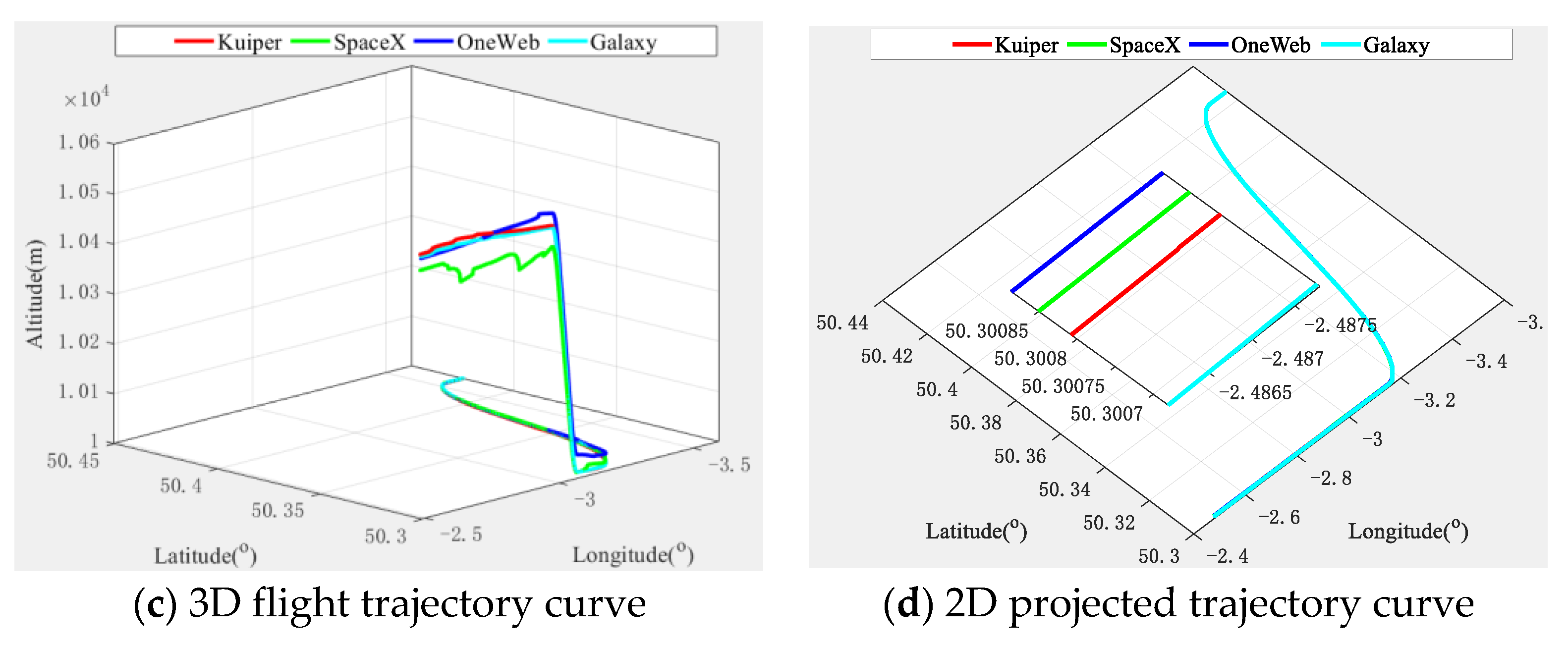
4.2. Altimeter-Assisted Multi-Aircraft Cooperative Navigation and Positioning Algorithm
- (1)
- When the altimeter has no deviation, the maximum position error accuracies of the aircraft are 6.0367 m (Ac1), 11.9447 m (Ac2), and 7.5365 m (Ac3), and the minimum error accuracies are 0.2184 m (Ac1), 0.3412 m (Ac2), and 0.2725 m (Ac3). Accordingly, the maximum velocity error accuracies of the aircraft are 0.1845 m/s (Ac1), 0.3077 m/s (Ac2), and 0.2045 m/s (Ac3), and the minimum error accuracies are 0.0183 m/s (Ac1), 0.0288 m/s (Ac2), and 0.0196 m/s (Ac3).
- (2)
- In the case of an altimeter error of 5 m, the maximum position error accuracies of the aircraft are 5.8723 m (Ac1), 12.7277 m (Ac2), and 8.2712 m (Ac3), and the minimum error accuracies are 0.3580 m (Ac1), 0.4090 m (Ac2) and 0.3655 m (Ac3). Accordingly, the maximum velocity error accuracies of the aircraft are 0.1853 m/s (Ac1), 0.3139 m/s (Ac2), and 0.2105 m/s (Ac3), and the minimum error accuracies are 0.0168 m/s (Ac1), 0.0279 m/s (Ac2), and 0.0211 m/s (Ac3).
- (3)
- In the case an of altimeter error of 15 m, the maximum position error accuracies of the aircraft are 6.0002 m (Ac1), 14.3562 m (Ac2), and 9.8341 m (Ac3), and the minimum error accuracies are 0.9273 m (Ac1), 0.9165 m (Ac2) and 0.9072 m (Ac3). Accordingly, the maximum velocity error accuracies of the aircraft are 0.1880 m/s (Ac1), 0.3269 m/s (Ac2), and 0.2230 m/s (Ac3), and the minimum error accuracies are 0.0149 m/s (Ac1), 0.0269 m/s (Ac2), and 0.0196 m/s (Ac3).
4.3. Influence of Aircraft Configuration on Aircraft Positioning Accuracy
- (1)
- Horizontal collinear situation
- (2)
- Vertical collinear situation
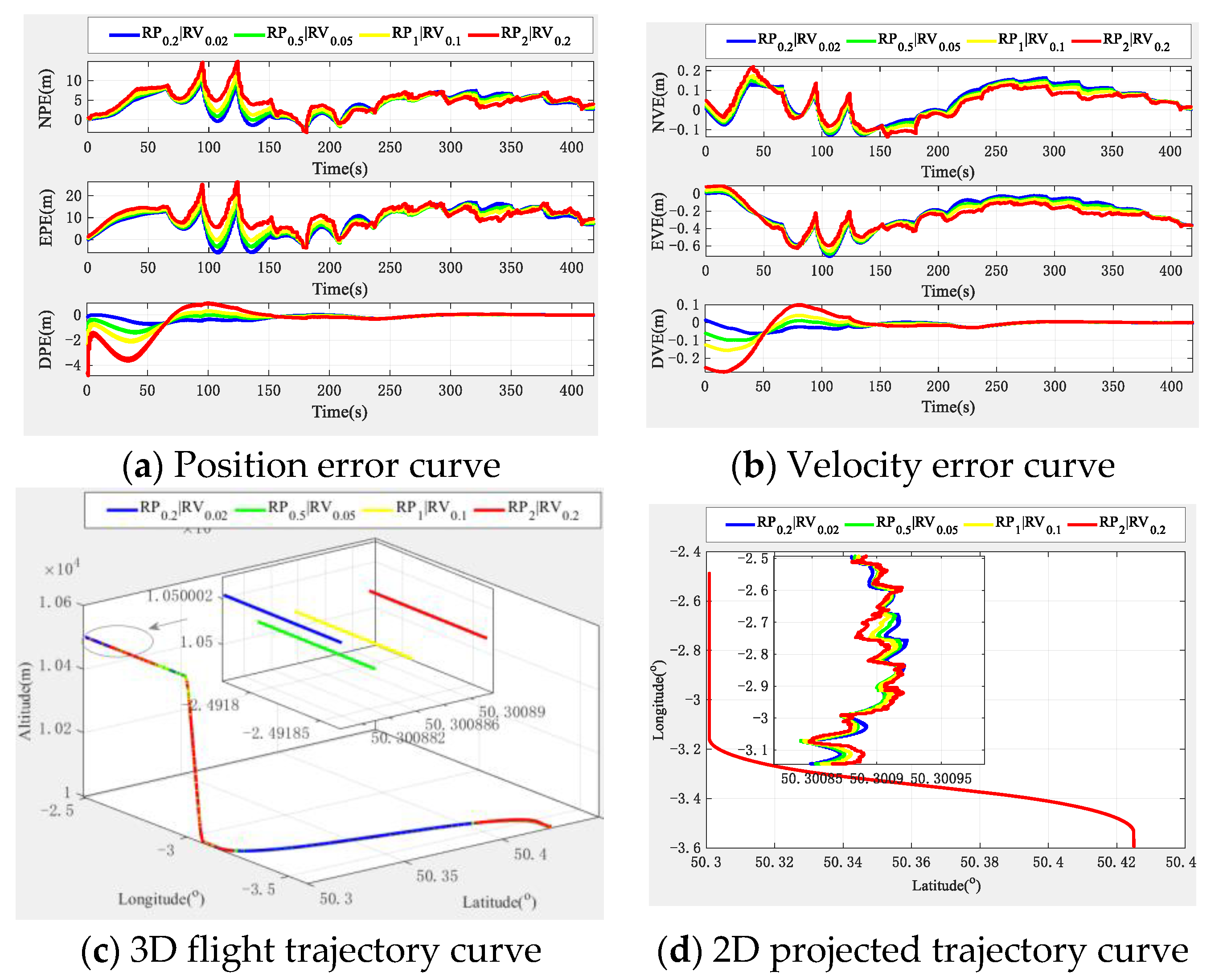
4.4. Influence of Relative Positioning Error on Aircraft Positioning Accuracy
5. Algorithm Comparison
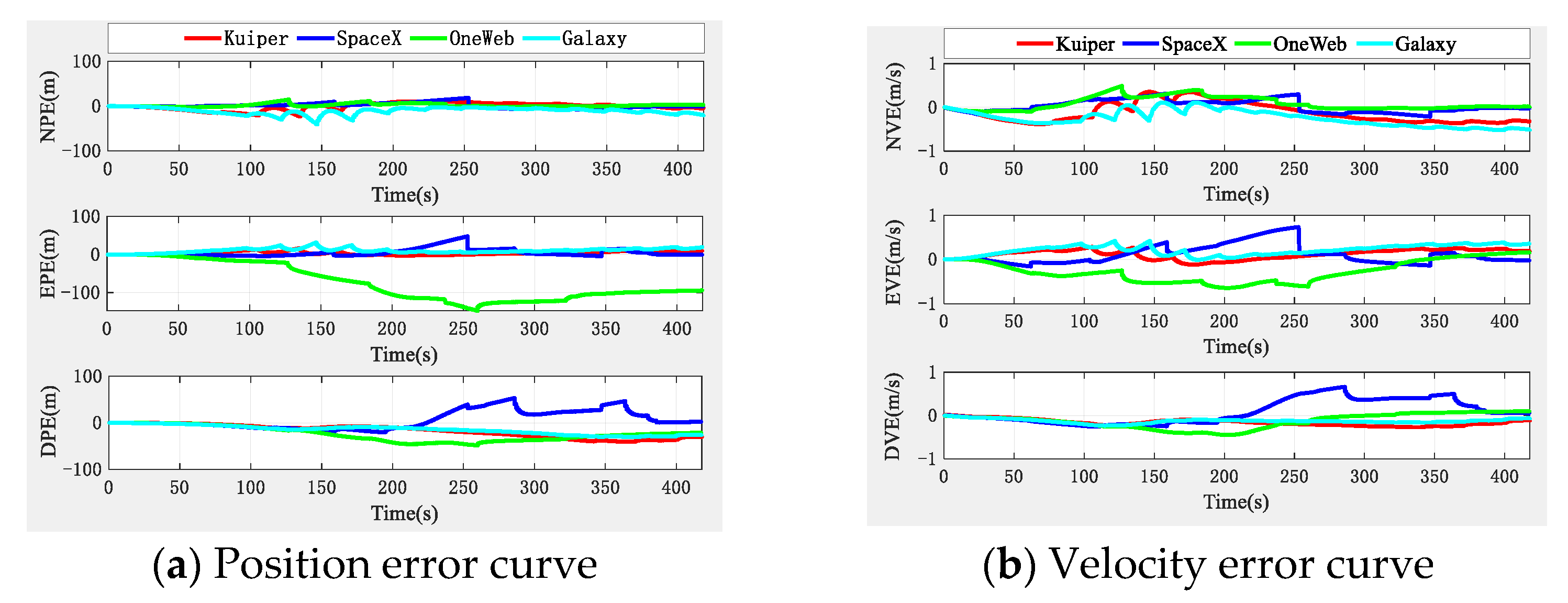
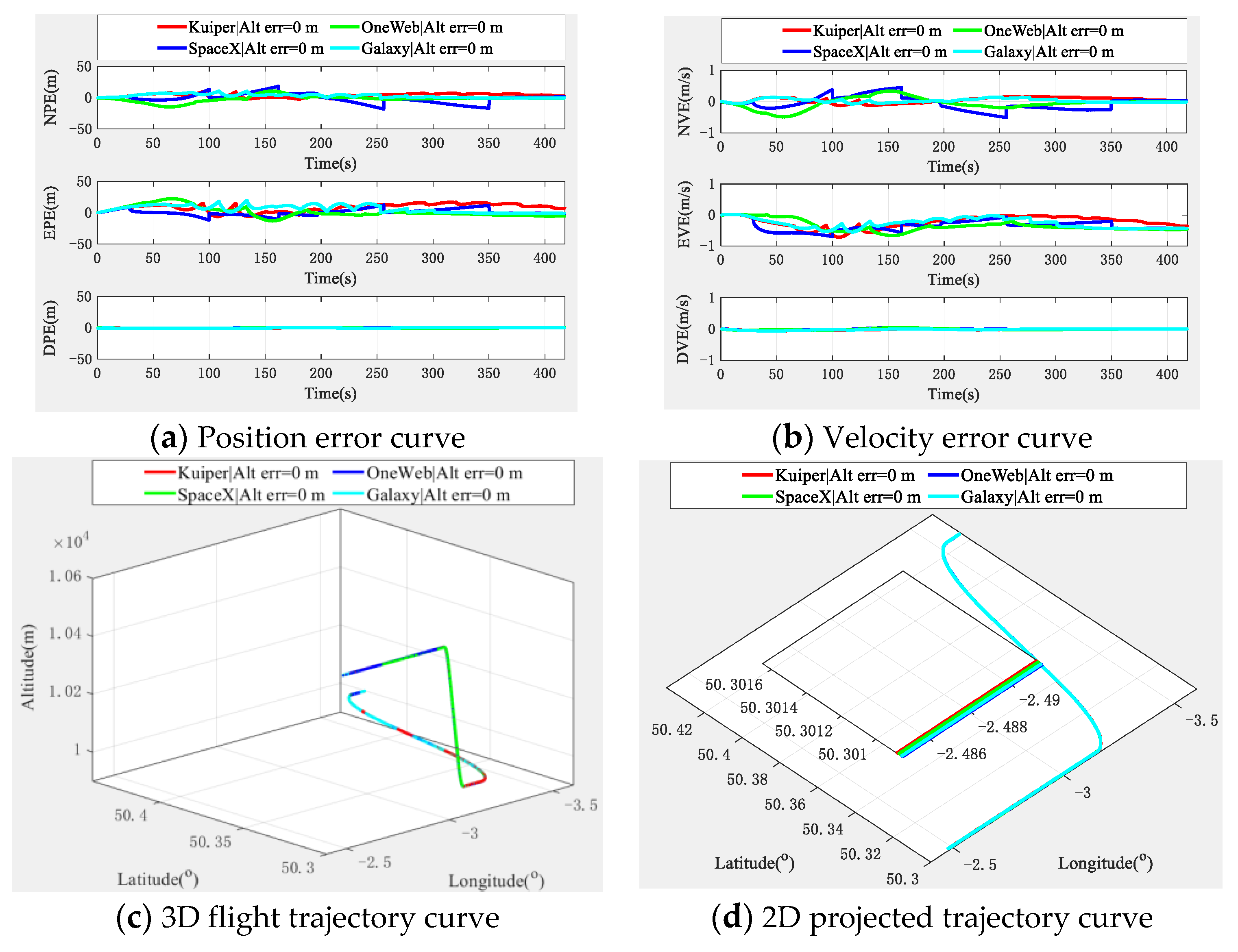
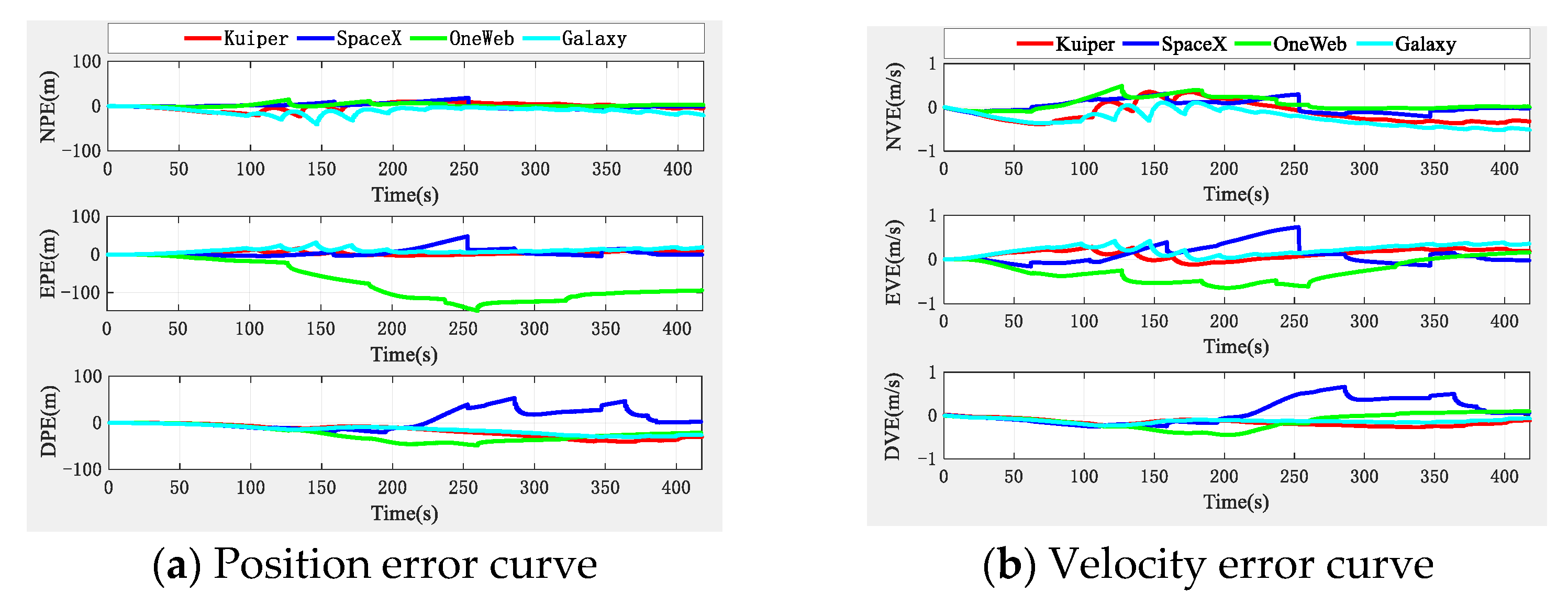
5.1. Comparison of Different LEO Constellations
5.2. Comparison with Other Typical Algorithms
6. Discussion, Conclusions and Future Works
- (1)
- Whether it is an altimeter-free or altimeter-assisted scenario, it can effectively suppress the divergence of navigation and positioning results caused by pure INS applications, and can further improve the single-satellite navigation and positioning accuracy under coordination;
- (2)
- Even if the formation performs cooperative navigation under different flight configurations and relative measurement accuracy, the algorithm can ensure good adaptability and robustness, and it can provide good location services which can be used as a reference scheme for feasibility exploration of a new cooperative navigation and positioning mode based on LEO communication satellites;
- (3)
- Under different relative measurement accuracy, algorithm can still ensure good stability and robustness, indicating that the algorithm can be applied to flight business requirements equipped with sensors with different measurement accuracy, and is highly suitable for different application fields with cost requirements;
- (4)
- Under different LEO constellations, the algorithm shows good universality, which means that the algorithm has strong scalability and adaptability for future ICN technical solutions, and can be used as a reference solution;
- (5)
- Compared with other typical algorithms, our algorithm has specific advantages in various indicators, particularly for the absolute positioning situation of single satellite. It can be seen that adding relative measurement information can effectively improve the absolute positioning performance of formation members, which is a highly suitable a reference scheme for large-scale formation integration and collaborative control in the future.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, J.; Ma, M.; Law, C.L. AOA Cooperative Position Localization. In Proceedings of the IEEE the Globecom IEEE Global Telecommunications Conference, New Orleans, LA, USA, 30 November–4 December 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Xu, J.; Ma, M.; Law, C.L. Cooperative angle-of-arrival position localization. Measurement 2015, 59, 302–313. [Google Scholar] [CrossRef]
- Soatti, G.; Nicoli, M.; Garcia, N.; Denis, B.; Raulefs, R.; Wymeersch, H. Implicit Cooperative Positioning in Vehicular Networks. Intell. Transp. Syst. IEEE Trans. 2018, 19, 3964–3980. [Google Scholar] [CrossRef] [Green Version]
- Qu, Y.; Wu, J.; Xiao, B.; Yuan, D.A. Fault-tolerant Cooperative Positioning Approach for Multiple UAVs. IEEE Access 2017, 5, 15630–15640. [Google Scholar] [CrossRef]
- Masiero, A.; Toth, C.; Gabela, J.; Retscher, G.; Keal, A.; Perakis, H.; Gikas, V.; Grejner-Brzezinska, D. Experimental Assessment of UWB and Vision-Based Car Cooperative Positioning System. Remote Sens. 2021, 13, 4858. [Google Scholar] [CrossRef]
- Xie, Q.; Song, L.; Lu, H.; Zhou, B. Review of Collaborative Navigation Technology. Aero Weapon. 2019, 26, 23–30. [Google Scholar]
- Xu, B.; Bai, J.L.; Hao, Y.L.; Gao, W.; Liu, Y.L. The research status and progress of cooperative navigation for multiple AUVs. Acta Autom. Sin. 2015, 41, 445–461. [Google Scholar]
- Schwarzbach, P.; Reichelt, B.; Michler, O.; Richter, P.; Trautmann, T. Cooperative Positioning for Urban Environments based on GNSS and IEEE 802.11p. In Proceedings of the 2018 15th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2018. [Google Scholar] [CrossRef]
- Celik, G.; Celebi, H. TOA positioning for uplink cooperative NOMA in 5G networks. Phys. Commun. 2019, 36, 100812. [Google Scholar] [CrossRef]
- Hein, G.W. Status, perspectives and trends of satellite navigation. Satell. Navig. 2020, 1, 22. [Google Scholar] [CrossRef]
- Mladen, Z.; Đuro, B.; Kristina, M. Razvoj i modernizacija GNSS-a. Geod. List 2019, 73, 45–65. Available online: https://hrcak.srce.hr/en/clanak/319453 (accessed on 7 March 2022).
- Del, P.I.; Cameron, B.G.; Crawley, E.F. A technical comparison of three low earth orbit satellite constellation systems to provide global broadband. Acta Astronaut. 2019, 159, 123–135. [Google Scholar]
- Reid, T.G.; Neish, A.M.; Walter, T.; Enge, P.K. Broadband LEO Constellations for Navigation. Navigation 2018, 65, 205–220. [Google Scholar] [CrossRef]
- Ranger, F.J. Principles of JTIDS Relative Navigation. J. Navig. 1996, 49, 22–35. [Google Scholar] [CrossRef]
- Qin, H.; Cong, L.; Zheng, X.; Liu, H. A JTIDS/INS/DGPS navigation system with pseudorange differential information transmitted over Link-16: Design and implementation. GPS Solut. 2013, 17, 391–402. [Google Scholar] [CrossRef]
- Ye, L.; Yang, Y.; Jing, X.; Ma, J.; Deng, L.; Li, H. Single-satellite Integrated Navigation Algorithm Based on Broadband LEO Constellation Communication Links. Remote Sens. 2021, 13, 703. [Google Scholar] [CrossRef]
- Gao, Y.; Meng, X.; Hancock, C.; Stephenson, S. UWB/GNSS-based cooperative positioning method for V2X applications. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Tampa, FL, USA, 8–12 September 2014; pp. 3212–3221. [Google Scholar]
- Ko, H.; Kim, B.; Kong, S.H. GNSS Multipath-Resistant Cooperative Navigation in Urban Vehicular Networks. IEEE Trans. Veh. Technol. 2015, 64, 5450–5463. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Li, Z.; Meng, X. A Tightly-Coupled GPS/INS/UWB Cooperative Positioning Sensors System Supported by V2I Communication. Sensors 2016, 16, 944. [Google Scholar] [CrossRef]
- Kim, J.; Tapley, B.D. Simulation of Dual One-Way Ranging Measurements. J. Spacecr. Rocket. 2003, 40, 419–425. [Google Scholar] [CrossRef]
- Zhong, X. The system and its delay calibration method on inter-satellite dual one-way ranging and timing. J. Electron. Meas. Instrum. 2009, 23, 13–17. [Google Scholar] [CrossRef]
- Li, X.; Liu, L.; Yang, Y. Intra-satellite baseline measurment via asynchronous communication link of autonomous formation flyer. J. Astronaut. 2008, 4, 1369–1396. [Google Scholar]
- CCSDS 211.1-B-4; Proximity-1 Space Link Protocol—Data Link Layer. CCSDS Blue Book. CCSDS Secretariat: Washington, DC, USA, 2006. Available online: https://public.ccsds.org/Pubs/211x1b4e1.pdf (accessed on 7 March 2022).
- Li, X.; Xu, Y.; Wang, C.; Zhang, Q. Position of rover by UHF communication link on lunar surface. J. Beijing Univ. Aeronaut. Astronaut. 2008, 34, 183–187. [Google Scholar]
- Kaplan, E.D.; Hegarty, C.J. Understanding GPS: Principles and Applications, 2nd ed.; Artech House Publishers: Boston, MA, USA, 2005. [Google Scholar]
- Bao-yen, T.J. Fundamentals of Global Positioning System Receivers: A Software Approach, 7th ed.; John Wiley & Sons Incorporation: New Jersey, NJ, USA, 2005. [Google Scholar]
- Li, X.; Zhang, Q.; Xi, Q.; Zhong, X.; Xiong, Z. Inter-satellite Baseline Measurement Technology via Asynchronous Communication Link. J. Electron. Inf. Technol. 2008, 30, 1525–1529. [Google Scholar] [CrossRef]
- Dong, W.; Zhao, D.; Hu, Y.; Zhang, X.; He, Z. Performance analysis of domestic laser-pumped cesium atomic clock. J. Time Freq. 2019, 42, 319–326. [Google Scholar]
- Li, X.; Zhang, Q.S.; Xu, Y.; Wang, C. New techniques of intra-satellite communication and ranging/time synchronization for autonomous formation flyer. J. Commun. 2008, 29, 81–87. [Google Scholar]
- Shouny, A.E.; Miky, Y. Accuracy assessment of relative and precise point positioning online GPS processing services. J. Appl. Geod. 2019, 13, 215–227. [Google Scholar] [CrossRef]
- Zhang, G.; Cheng, Y.; Cheng, C. A Joint Correcting Method of Multi-platform INS Error Based on Relative Navigation. Acta Aeronaut. Et Astronaut. Sin. 2011, 32, 271–280. [Google Scholar]
- Zhang, M.; Zhang, J. A Fast Satellite Selection Algorithm: Beyond Four Satellites. IEEE J. Sel. Top. Signal Processing 2009, 3, 740–747. [Google Scholar] [CrossRef]
- Ye, L.; Yang, Y.; Jing, X.; Li, H.; Yang, H.; Xia, Y. Altimeter + INS/Giant LEO Constellation Dual-Satellite Integrated Navigation and Positioning Algorithm Based on Similar Ellipsoid Model and UKF. Remote Sens. 2021, 13, 4099. [Google Scholar] [CrossRef]
- Pan, R.; Shenghong, X.U.; Brigade, S. Multi-UAV Cooperative Navigation Algorithm Based on Geometric Characteristics. J. Ordnance Equip. Eng. 2017, 38, 55–59. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: Fitchburg, MA, USA, 2008; p. 503. ISBN 978-1-58053-255-6. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems, 2nd ed.; Artech House: Fitchburg, MA, USA, 2012; p. 776. ISBN 978-1-60807-005-3. [Google Scholar]
- Yang, J.; Wu, Q. GPS Principles and its Matlab Simulation; Xidian University Press: Xi’an, China, 2006; ISBN 7-5606-1723-9. [Google Scholar]
- Montenbruck, O.; Gill, E. Satellite Orbits; Springer: Berlin/Heidelberg, Germany, 2000; ISBN 978-3-642-58351-3. [Google Scholar]
- ISO 2533:1975; Standard Atmosphere. ISO: Geneva, Switzerland, 1975.
- Ye, L.; Fan, Z.; Zhang, H.; Liu, Y.; Wu, W.; Hu, Y. Analysis of GNSS Signal Code Tracking Accuracy under Gauss Interference. Comput. Sci. 2020, 47, 245–251. [Google Scholar]
- Groves, P.D. GNSS Solutions: Multipath vs. NLOS signals. How Does Non-Line-of-Sight Reception Differ from Multipath Interference. Inside GNSS Mag. 2013, 8, 40–42. [Google Scholar]
- Groves, P.D.; Adjrad, M. Likelihood-based GNSS positioning using LOS/NLOS predictions from 3D mapping and pseudoranges. GPS Solut. 2017, 21, 1805–1816. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Huang, W.; Chen, J. Satellite Navigation System Modeling and Simulation; Science Press: Beijing, China, 2016. [Google Scholar]
- Fance, J. “Kuiper” constellation introduction and comparison with other constellations. Space Int. 2020, 12, 27–31. [Google Scholar]
- Ansari, K.; Feng, Y.; Tang, M. A Runtime Integrity Monitoring Framework for Real-Time Relative Positioning Systems Based on GPS and DSRC. IEEE Trans. Intell. Transp. Syst. 2015, 16, 980–992. [Google Scholar] [CrossRef] [Green Version]
- Williamson, W.R.; Abdel-Hafez, M.F.; Rhee, I.; Song, E.; Wolfe, J.D.; Chichka, D.F.; Speyer, J.L. An Instrumentation System Applied to Formation Flight. IEEE Trans. Control. Syst. Technol. 2007, 15, 75–85. [Google Scholar] [CrossRef]
- Wang, B.; Li, J. The Development of Low-Orbit Connected Satellites and the Prospect of Meteorological Cooperation Model. Adv. Meteorol. Sci. Technol. 2021, 11, 19–27. [Google Scholar]
- Yue, Z.; Lian, B.; Tang, C. An Algorithm of Inertial Aided Single Satellite Navigation with High Dynamic. J. Northwestern Polytech. Univ. 2017, 35, 121–127. [Google Scholar]
- Hsu, W.H.; Jan, S.S. Assessment of using Doppler shift of LEO satellites to aid GPS positioning. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium-PLANS 2014, Monterey, CA, USA, 5–8 May 2014; pp. 1155–1161. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constellation | Aircraft | ||
|---|---|---|---|
| Orbital height | 610 km | vAc1 | approximately 1 Mach |
| Orbital inclination | 42° | vAc2 | approximately 1 Mach |
| Orbital surfaces | 36 | vAc3 | approximately 1 Mach |
| Number of satellites per orbit | 36 | L | 10 km |
| Total number of satellites | 1296 | h | 5 km |
| Parameter | Value |
|---|---|
| ) | 0.002 |
| Gyroscope first-order Markov noise RMS/(deg/) | 0.002 |
| Accelerometer noise root PSD/ | 30 |
| Accelerometer first-order Markov noise RMS/ | 10 |
| Relative distance measurement white noise RMS/m | 0.2 |
| Relative velocity measurement white noise RMS/() | 0.02 |
| Data link ranging error/m | 10 |
| Algorithm | Mean (m) | STD (m) | ||||
|---|---|---|---|---|---|---|
| N | E | D | N | E | D | |
| Algorithm [48] | / | / | / | 15.7 | 43.2 | 3.8 |
| Algorithm [49] | −7.489 | 20.762 | −140.377 | 3.659 | 1.218 | 28.266 |
| Algorithm [16] | −32.6619 | −41.9907 | 70.4270 | 21.4059 | 46.4180 | 79.3741 |
| Algorithm + [16] | −6.6661 | −9.5780 | 0.0008 | 7.8891 | 17.4749 | 0.0182 |
| This algorithm | 5.5416 | 4.7852 | −32.6606 | 14.5480 | 6.4505 | 27.4803 |
| This algorithm + | 3.7988 | 8.3101 | 0.1775 | 2.7011 | 6.0367 | 0.2184 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, L.; Yang, Y.; Ma, J.; Deng, L.; Li, H. Research on an LEO Constellation Multi-Aircraft Collaborative Navigation Algorithm Based on a Dual-Way Asynchronous Precision Communication-Time Service Measurement System (DWAPC-TSM). Sensors 2022, 22, 3213. https://doi.org/10.3390/s22093213
Ye L, Yang Y, Ma J, Deng L, Li H. Research on an LEO Constellation Multi-Aircraft Collaborative Navigation Algorithm Based on a Dual-Way Asynchronous Precision Communication-Time Service Measurement System (DWAPC-TSM). Sensors. 2022; 22(9):3213. https://doi.org/10.3390/s22093213
Chicago/Turabian StyleYe, Lvyang, Yikang Yang, Jiangang Ma, Lingyu Deng, and Hengnian Li. 2022. "Research on an LEO Constellation Multi-Aircraft Collaborative Navigation Algorithm Based on a Dual-Way Asynchronous Precision Communication-Time Service Measurement System (DWAPC-TSM)" Sensors 22, no. 9: 3213. https://doi.org/10.3390/s22093213
APA StyleYe, L., Yang, Y., Ma, J., Deng, L., & Li, H. (2022). Research on an LEO Constellation Multi-Aircraft Collaborative Navigation Algorithm Based on a Dual-Way Asynchronous Precision Communication-Time Service Measurement System (DWAPC-TSM). Sensors, 22(9), 3213. https://doi.org/10.3390/s22093213