Toward Smart Footwear to Track Frailty Phenotypes—Using Propulsion Performance to Determine Frailty



Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Frailty Phenotype Assessment
2.3. Sensor-Based Gait Assessment
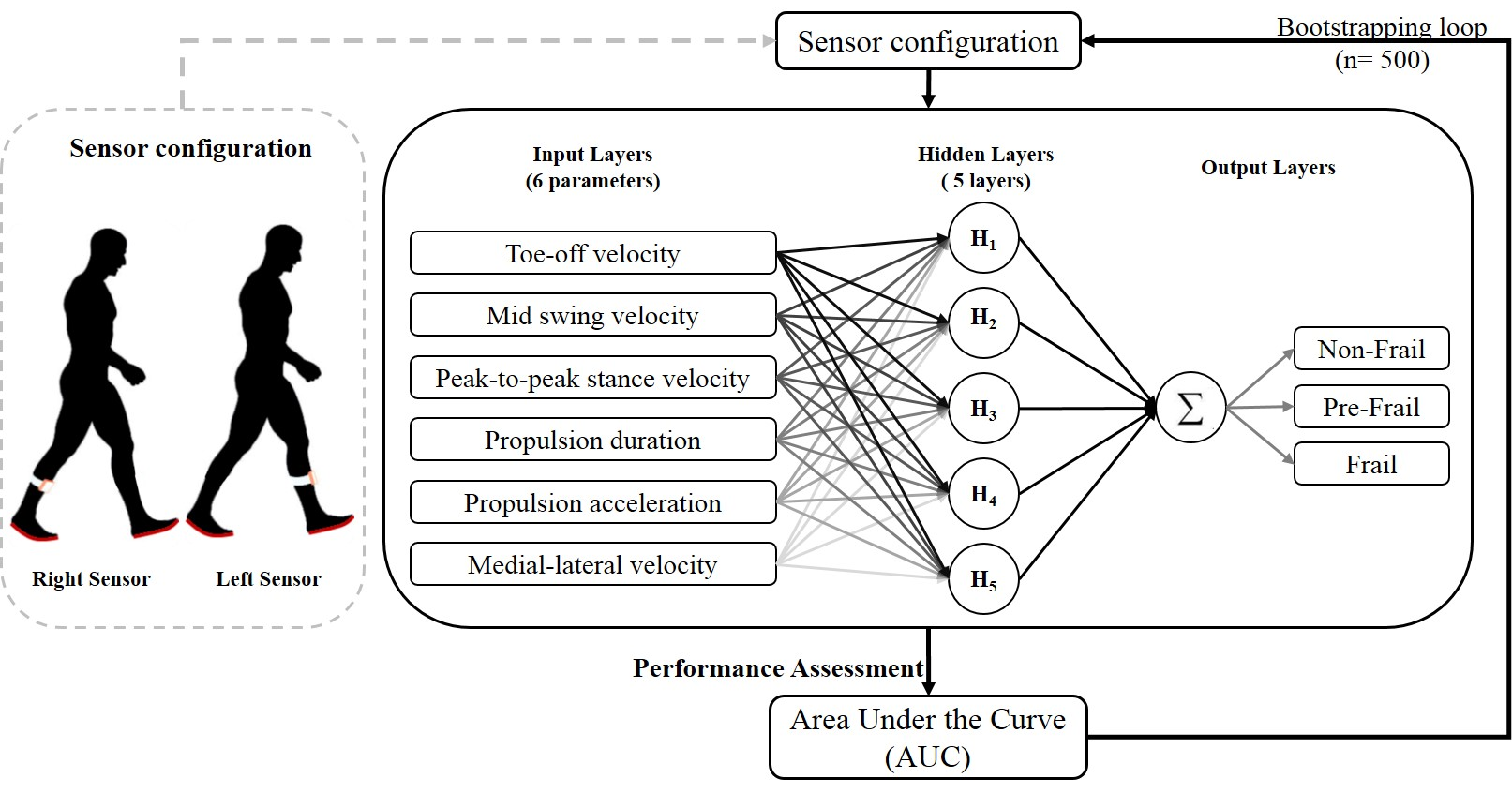
2.4. Neural Network Model
2.5. Statistical Analysis
3. Results
3.1. Demographic and Clinical Data
3.2. Sensor-Based Assessment of Frailty
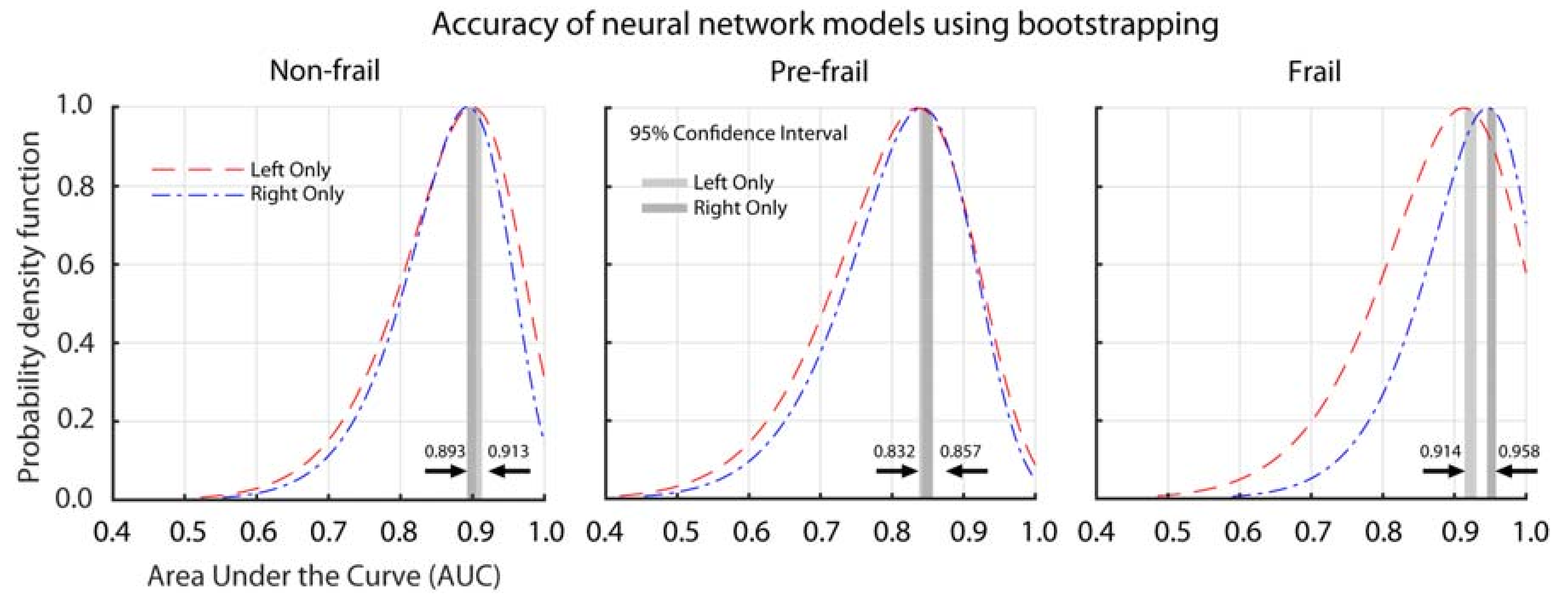
3.3. Neural Network Modeling
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- An Aging Nation. Available online: https://www.census.gov/library/visualizations/2017/comm/cb17-ff08_older_americans.html (accessed on 25 September 2017).
- Kojima, G.; Kendrick, D.; Skelton, D.A.; Morris, R.W.; Gawler, S.; Iliffe, S. Frailty predicts short-term incidence of future falls among British community-dwelling older people: A prospective cohort study nested within a randomised controlled trial. BMC Geriatr. 2015, 15, 155. [Google Scholar] [CrossRef] [PubMed]
- Schultz, M.; Rosted, E.; Sanders, S. Frailty is associated with a history with more falls in elderly hospitalised patients. Dan. Med. J. 2015, 62, A5058. [Google Scholar] [PubMed]
- Mohler, M.J.; Wendel, C.S.; Taylor-Piliae, R.E.; Toosizadeh, N.; Najafi, B. Motor Performance and Physical Activity as Predictors of Prospective Falls in Community-Dwelling Older Adults by Frailty Level: Application of Wearable Technology. Gerontology 2016, 62, 654–664. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, H.S.; Peel, N.M.; Hubbard, R.E. Baseline Vulnerability and Inpatient Frailty Status in Relation to Adverse Outcomes in a Surgical Cohort. J. Frailty Aging 2016, 5, 180–182. [Google Scholar] [PubMed]
- Arya, S.; Kim, S.I.; Duwayri, Y.; Brewster, L.P.; Veeraswamy, R.; Salam, A.; Dodson, T.F. Frailty increases the risk of 30-day mortality, morbidity, and failure to rescue after elective abdominal aortic aneurysm repair independent of age and comorbidities. J. Vasc. Surg. 2015, 61, 324–331. [Google Scholar] [CrossRef] [PubMed]
- Karam, J.; Tsiouris, A.; Shepard, A.; Velanovich, V.; Rubinfeld, I. Simplified frailty index to predict adverse outcomes and mortality in vascular surgery patients. Ann. Vasc. Surg. 2013, 27, 904–908. [Google Scholar] [CrossRef] [PubMed]
- Joseph, B.; Toosizadeh, N.; Orouji Jokar, T.; Heusser, M.R.; Mohler, J.; Najafi, B. Upper-Extremity Function Predicts Adverse Health Outcomes among Older Adults Hospitalized for Ground-Level Falls. Gerontology 2017, 63, 299–307. [Google Scholar] [CrossRef] [PubMed]
- Chang, Y.-W.; Chen, W.-L.; Lin, F.-G.; Fang, W.-H.; Yen, M.-Y.; Hsieh, C.-C.; Kao, T.-W. Frailty and its impact on health-related quality of life: A cross-sectional study on elder community-dwelling preventive health service users. PLoS ONE 2012, 7, e38079. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Nogueras, I.; Aranda-Reneo, I.; Pena-Longobardo, L.M.; Oliva-Moreno, J.; Abizanda, P. Use of Health Resources and Healthcare Costs associated with Frailty: The FRADEA Study. J. Nutr. Health Aging 2017, 21, 207–214. [Google Scholar] [CrossRef] [PubMed]
- Mohler, M.J.; Fain, M.J.; Wertheimer, A.M.; Najafi, B.; Nikolich-Zugich, J. The Frailty syndrome: Clinical measurements and basic underpinnings in humans and animals. Exp. Gerontol. 2014, 54, 6–13. [Google Scholar] [CrossRef] [PubMed]
- Cesari, M.; Gambassi, G.; van Kan, G.A.; Vellas, B. The frailty phenotype and the frailty index: Different instruments for different purposes. Age Ageing 2014, 43, 10–12. [Google Scholar] [CrossRef] [PubMed]
- Fried, L.P.; Tangen, C.M.; Walston, J.; Newman, A.B.; Hirsch, C.; Gottdiener, J.; Seeman, T.; Tracy, R.; Kop, W.J.; Burke, G.; et al. Frailty in older adults: Evidence for a phenotype. J. Gerontol. Ser. A Biol. Sci. Med. Sci. 2001, 56, M146–M156. [Google Scholar] [CrossRef]
- Clegg, A.; Young, J.; Iliffe, S.; Rikkert, M.O.; Rockwood, K. Frailty in elderly people. Lancet 2013, 381, 752–762. [Google Scholar] [CrossRef] [Green Version]
- Zhou, H.; Sabbagh, M.; Wyman, R.; Liebsack, C.; Kunik, M.E.; Najafi, B. Instrumented Trail-Making Task to Differentiate Persons with No Cognitive Impairment, Amnestic Mild Cognitive Impairment, and Alzheimer Disease: A Proof of Concept Study. Gerontology 2017, 63, 189–200. [Google Scholar] [CrossRef] [PubMed]
- Schwenk, M.; Howe, C.; Saleh, A.; Mohler, J.; Grewal, G.; Armstrong, D.; Najafi, B. Frailty and technology: A systematic review of gait analysis in those with frailty. Gerontology 2014, 60, 79–89. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Joseph, B.; Enriquez, A.; Najafi, B. Toward Using a Smartwatch to Monitor Frailty in a Hospital Setting: Using a Single Wrist-Wearable Sensor to Assess Frailty in Bedbound Inpatients. Gerontology 2017. [Google Scholar] [CrossRef] [PubMed]
- Toosizadeh, N.; Joseph, B.; Heusser, M.R.; Orouji Jokar, T.; Mohler, J.; Phelan, H.A.; Najafi, B. Assessing Upper-Extremity Motion: An Innovative, Objective Method to Identify Frailty in Older Bed-Bound Trauma Patients. J. Am. Coll. Surg. 2016, 223, 240–248. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Toosizadeh, N.; Mohler, J.; Najafi, B. Assessing Upper Extremity Motion: An Innovative Method to Identify Frailty. J. Am. Geriatr. Soc. 2015, 63, 1181–1186. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.; Lee, H.; Lee, J.; Schwenk, M.; Najafi, B. Motor Planning Error: Toward Measuring Cognitive Frailty in Older Adults Using Wearables. Sensors 2018, 18, 926. [Google Scholar] [CrossRef] [PubMed]
- Galan-Mercant, A.; Cuesta-Vargas, A.I. Mobile Romberg test assessment (mRomberg). BMC Res. Notes 2014, 7, 640. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schwenk, M.; Mohler, J.; Wendel, C.; D’Huyvetter, K.; Fain, M.; Taylor-Piliae, R.; Najafi, B. Wearable sensor-based in-home assessment of gait, balance, and physical activity for discrimination of frailty status: Baseline results of the Arizona frailty cohort study. Gerontology 2015, 61, 258–267. [Google Scholar] [CrossRef] [PubMed]
- Rosenberg, I.H. Sarcopenia: Origins and clinical relevance. J. Nutr. 1997, 127, 990S–991S. [Google Scholar] [CrossRef] [PubMed]
- Razjouyan, J.; Naik, A.D.; Horstman, M.J.; Kunik, M.E.; Amirmazaheri, M.; Zhou, H.; Sharafkhaneh, A.; Najafi, B. Wearable Sensors and the Assessment of Frailty among Vulnerable Older Adults: An Observational Cohort Study. Sensors 2018, 18, 1336. [Google Scholar] [CrossRef] [PubMed]
- Parvaneh, S.; Mohler, J.; Toosizadeh, N.; Grewal, G.S.; Najafi, B. Postural Transitions during Activities of Daily Living Could Identify Frailty Status: Application of Wearable Technology to Identify Frailty during Unsupervised Condition. Gerontology 2017, 63, 479–487. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Galan-Mercant, A.; Cuesta-Vargas, A.I. Differences in Trunk Accelerometry Between Frail and Nonfrail Elderly Persons in Sit-to-Stand and Stand-to-Sit Transitions Based on a Mobile Inertial Sensor. JMIR Mhealth Uhealth 2013, 1, e21. [Google Scholar] [CrossRef] [PubMed]
- Greene, B.R.; Doheny, E.P.; O’Halloran, A.; Anne Kenny, R. Frailty status can be accurately assessed using inertial sensors and the TUG test. Age Ageing 2014, 43, 406–411. [Google Scholar] [CrossRef] [PubMed]
- Galan-Mercant, A.; Cuesta-Vargas, A.I. Differences in trunk accelerometry between frail and non-frail elderly persons in functional tasks. BMC Res Notes 2014, 7, 100. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hegde, N.; Zhang, T.; Uswatte, G.; Taub, E.; Barman, J.; McKay, S.; Taylor, A.; Morris, D.M.; Griffin, A.; Sazonov, E.S. The Pediatric SmartShoe: Wearable Sensor System for Ambulatory Monitoring of Physical Activity and Gait. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 477–486. [Google Scholar] [CrossRef] [PubMed]
- Bamberg, S.J.; Benbasat, A.Y.; Scarborough, D.M.; Krebs, D.E.; Paradiso, J.A. Gait analysis using a shoe-integrated wireless sensor system. IEEE Trans. Inf. Technol. Biomed. 2008, 12, 413–423. [Google Scholar] [CrossRef] [PubMed]
- Gonzalez, I.; Fontecha, J.; Hervas, R.; Bravo, J. An Ambulatory System for Gait Monitoring Based on Wireless Sensorized Insoles. Sensors 2015, 15, 16589–16613. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rampp, A.; Barth, J.; Schulein, S.; Gassmann, K.G.; Klucken, J.; Eskofier, B.M. Inertial sensor-based stride parameter calculation from gait sequences in geriatric patients. IEEE Trans. Bio-Med. Eng. 2015, 62, 1089–1097. [Google Scholar] [CrossRef] [PubMed]
- Mariani, B.; Jimenez, M.C.; Vingerhoets, F.J.; Aminian, K. On-shoe wearable sensors for gait and turning assessment of patients with Parkinson’s disease. IEEE Trans. Bio-Med. Eng. 2013, 60, 155–158. [Google Scholar] [CrossRef] [PubMed]
- Nsenga Leunkeu, A.; Lelard, T.; Shephard, R.J.; Doutrellot, P.L.; Ahmaidi, S. Gait cycle and plantar pressure distribution in children with cerebral palsy: Clinically useful outcome measures for a management and rehabilitation. NeuroRehabilitation 2014, 35, 657–663. [Google Scholar] [PubMed]
- Schlachetzki, J.C.M.; Barth, J.; Marxreiter, F.; Gossler, J.; Kohl, Z.; Reinfelder, S.; Gassner, H.; Aminian, K.; Eskofier, B.M.; Winkler, J.; et al. Wearable sensors objectively measure gait parameters in Parkinson’s disease. PLoS ONE 2017, 12, e0183989. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, H.; Lebel, K.; Bogard, S.; Goubault, E.; Boissy, P.; Duval, C. Using Inertial Sensors to Automatically Detect and Segment Activities of Daily Living in People With Parkinson’s Disease. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 197–204. [Google Scholar] [CrossRef] [PubMed]
- McCormick, L.; Martin, L.; Thomas, J. 1Introducing Gait Speed to Assess Frailty Outcomes In Day Hospital Patients. Age Ageing 2016, 45, i1. [Google Scholar] [CrossRef]
- Martínez-Ramírez, A.; Martinikorena, I.; Gómez, M.; Lecumberri, P.; Millor, N.; Rodríguez-Mañas, L.; García García, F.J.; Izquierdo, M. Frailty assessment based on trunk kinematic parameters during walking. J. Neuroeng. Rehabil. 2015, 12, 48. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thiede, R.; Toosizadeh, N.; Mills, J.L.; Zaky, M.; Mohler, J.; Najafi, B. Gait and balance assessments as early indicators of frailty in patients with known peripheral artery disease. Clin. Biomech. 2016, 32, 1–7. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Griffin, T.M.; Roberts, T.J.; Kram, R. Metabolic cost of generating muscular force in human walking: Insights from load-carrying and speed experiments. J. Appl. Physiol. 2003, 95, 172–183. [Google Scholar] [CrossRef] [PubMed]
- Dudzińska-Griszek, J.; Szuster, K.; Szewieczek, J. Grip strength as a frailty diagnostic component in geriatric inpatients. Clin. Interv. Aging 2017, 12, 1151–1157. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Elhadi, M.M.O.; Ma, C.Z.; Wong, D.W.C.; Wan, A.H.P.; Lee, W.C.C. Comprehensive Gait Analysis of Healthy Older Adults Who Have Undergone Long-Distance Walking. J. Aging Phys. Act. 2017, 25, 367–377. [Google Scholar] [CrossRef] [PubMed]
- Davis, R.B.; DeLuca, P.A. Gait characterization via dynamic joint stiffness. Gait Posture 1996, 4, 224–231. [Google Scholar] [CrossRef]
- Grewal, G.; Sayeed, R.; Yeschek, S.; Menzies, R.A.; Talal, T.K.; Lavery, L.A.; Armstrong, D.G.; Najafi, B. Virtualizing the assessment: A novel pragmatic paradigm to evaluate lower extremity joint perception in diabetes. Gerontology 2012, 58, 463–471. [Google Scholar] [CrossRef] [PubMed]
- Reistetter, T.A.; Graham, J.E.; Deutsch, A.; Markello, S.J.; Granger, C.V.; Ottenbacher, K.J. Diabetes comorbidity and age influence rehabilitation outcomes after hip fracture. Diabetes Care 2011, 34, 1375–1377. [Google Scholar] [CrossRef] [PubMed]
- Veeravelli, S.; Najafi, B.; Marin, I.; Blumenkron, F.; Smith, S.; Klotz, S.A. Exergaming in Older People Living with HIV Improves Balance, Mobility and Ameliorates Some Aspects of Frailty. J. Vis. Exp. 2016. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tombaugh, T.N.; McIntyre, N.J. The mini-mental state examination: A comprehensive review. J. Am. Geriatr. Soc. 1992, 40, 922–935. [Google Scholar] [CrossRef] [PubMed]
- Taylor, H.L.; Jacobs, D.R., Jr.; Schucker, B.; Knudsen, J.; Leon, A.S.; Debacker, G. A questionnaire for the assessment of leisure time physical activities. J. Chronic Dis. 1978, 31, 741–755. [Google Scholar] [CrossRef]
- Najafi, B.; Helbostad, J.L.; Moe-Nilssen, R.; Zijlstra, W.; Aminian, K. Does walking strategy in older people change as a function of walking distance? Gait Posture 2009, 29, 261–266. [Google Scholar] [CrossRef] [PubMed]
- Najafi, B.; Khan, T.; Wrobel, J. Laboratory in a box: Wearable sensors and its advantages for gait analysis. Conf. Proc. IEEE Eng. Med. Biol. Soc. 2011, 2011, 6507–6510. [Google Scholar] [PubMed]
- Ayachi, F.; Nguyen, H.; Goubault, E.; Boissy, P.; Duval, C. The Use of Empirical Mode Decomposition-Based Algorithm and Inertial Measurement Units to Auto-Detect Daily Living Activities of Healthy Adults. IEEE Trans. Neural Syst. Rehabil. Eng. 2016. [Google Scholar] [CrossRef] [PubMed]
- Razjouyan, J.; Lee, H.; Parthasarathy, S.; Mohler, J.; Sharafkhaneh, A.; Najafi, B. Improving Sleep Quality Assessment Using Wearable Sensors by Including Information From Postural/Sleep Position Changes and Body Acceleration: A Comparison of Chest-Worn Sensors, Wrist Actigraphy, and Polysomnography. J. Clin. Sleep Med. 2017, 13, 1301–1310. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eng, J. Receiver Operating Characteristic Analysis: A Primer1. Acad. Radiol. 2005, 12, 909–916. [Google Scholar] [CrossRef] [PubMed]
- Swets, J.A. Indices of discrimination or diagnostic accuracy: their ROCs and implied models. Psychol. Bull. 1986, 99, 100–117. [Google Scholar] [CrossRef] [PubMed]
- Hanley, J.A.; McNeil, B.J. The meaning and use of the area under a receiver operating characteristic (ROC) curve. Radiology 1982, 143, 29–36. [Google Scholar] [CrossRef] [PubMed]
- Shieh, G. Confidence intervals and sample size calculations for the weighted eta-squared effect sizes in one-way heteroscedastic ANOVA. Behav. Res. Methods 2013, 45, 25–37. [Google Scholar] [CrossRef] [PubMed]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences; Lawrence Erlbaum Associates: Mahwah, NJ, USA, 1988. [Google Scholar]
- Spearman, C. The proof and measurement of association between two things. By C. Spearman, 1904. Am. J. Psychol. 1987, 100, 441–471. [Google Scholar] [CrossRef] [PubMed]
- Alvarez-Nebreda, M.L.; Bentov, N.; Urman, R.D.; Setia, S.; Huang, J.C.-S.; Pfeifer, K.; Bennett, K.A.; Ong, T.D.; Richman, D.; Gollapudi, D.; et al. Recommendations for preoperative management of frailty from the Society for Perioperative Assessment and Quality Improvement (SPAQI). Perioper. Care Oper. Room Manag. 2018, 10, 1–9. [Google Scholar] [CrossRef]
- Kramer, D.B.; Tsai, T.; Natarajan, P.; Tewksbury, E.; Mitchell, S.L.; Travison, T.G. Frailty, Physical Activity, and Mobility in Patients With Cardiac Implantable Electrical Devices. J. Am. Heart Assoc. 2017, 6. [Google Scholar] [CrossRef] [PubMed]
- Savva, G.M.; Donoghue, O.A.; Horgan, F.; O’Regan, C.; Cronin, H.; Kenny, R.A. Using timed up-and-go to identify frail members of the older population. J. Gerontol. A Biol. Sci. Med. Sci. 2013, 68, 441–446. [Google Scholar] [CrossRef] [PubMed]
- Podsiadlo, D.; Richardson, S. The Timed “Up & Go”: A Test of Basic Functional Mobility for Frail Elderly Persons. J. Am. Geriatr. Soc. 1991, 39, 142–148. [Google Scholar] [PubMed]
- Castell, M.-V.; Sánchez, M.; Julián, R.; Queipo, R.; Martín, S.; Otero, Á. Frailty prevalence and slow walking speed in persons age 65 and older: Implications for primary care. BMC Fam. Pract. 2013, 14, 86. [Google Scholar] [CrossRef] [PubMed]
- Rahemi, H.; Nigam, N.; Wakeling, J.M. The effect of intramuscular fat on skeletal muscle mechanics: Implications for the elderly and obese. J. R. Soc. Interface 2015, 12, 20150365. [Google Scholar] [CrossRef] [PubMed]
- Chang, Y.H.; Kram, R. Limitations to maximum running speed on flat curves. J. Exp. Biol. 2007, 210, 971–982. [Google Scholar] [CrossRef] [PubMed]
- Luo, G.; Stefanyshyn, D. Limb force and non-sagittal plane joint moments during maximum-effort curve sprint running in humans. J. Exp. Biol. 2012, 215, 4314–4321. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, W.; Zhang, C.; Ma, H.; Li, S. Learning Efficient Spatial-Temporal Gait Features with Deep Learning for Human Identification. Neuroinformatics 2018. [Google Scholar] [CrossRef] [PubMed]
- Uddin, M.Z.; Khaksar, W.; Torresen, J. A robust gait recognition system using spatiotemporal features and deep learning. In Proceedings of the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Daegu, Korea, 16–18 November 2017. [Google Scholar]
- Rockwood, K.; Blodgett, J.M.; Theou, O.; Sun, M.H.; Feridooni, H.A.; Mitnitski, A.; Rose, R.A.; Godin, J.; Gregson, E.; Howlett, S.E. A Frailty Index Based On Deficit Accumulation Quantifies Mortality Risk in Humans and in Mice. Sci. Rep. 2017, 7, 43068. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Drey, M.; Pfeifer, K.; Sieber, C.C.; Bauer, J.M. The Fried frailty criteria as inclusion criteria for a randomized controlled trial: Personal experience and literature review. Gerontology 2011, 57, 11–18. [Google Scholar] [CrossRef] [PubMed]
- Walston, J. Frailty Research Moves Beyond Risk Assessment. J. Gerontol. A Biol. Sci. Med. Sci. 2017, 72, 915–916. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tong, K.; Granat, M.H. A practical gait analysis system using gyroscopes. Med. Eng. Phys. 1999, 21, 87–94. [Google Scholar] [CrossRef]
- Aminian, K.; Najafi, B. Capturing human motion using body-fixed sensors: Outdoor measurement and clinical applications. Comput. Anim. Virtual Worlds 2004, 15, 79–94. [Google Scholar] [CrossRef]
- Liedtke, C.; Fokkenrood, S.A.; Menger, J.T.; van der Kooij, H.; Veltink, P.H. Evaluation of instrumented shoes for ambulatory assessment of ground reaction forces. Gait Posture 2007, 26, 39–47. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.; Sun, M.; Lester, D.K.; Pi-Sunyer, F.X.; Boozer, C.N.; Longman, R.W. Assessment of human locomotion by using an insole measurement system and artificial neural networks. J. Biomech. 2005, 38, 2276–2287. [Google Scholar] [CrossRef] [PubMed]
- Aminian, K.; Najafi, B.; Bula, C.; Leyvraz, P.F.; Robert, P. Spatio-temporal parameters of gait measured by an ambulatory system using miniature gyroscopes. J. Biomech. 2002, 35, 689–699. [Google Scholar] [CrossRef]
- Moufawad El Achkar, C.; Lenoble-Hoskovec, C.; Paraschiv-Ionescu, A.; Major, K.; Bula, C.; Aminian, K. Physical Behavior in Older Persons during Daily Life: Insights from Instrumented Shoes. Sensors 2016, 16, 1225. [Google Scholar] [CrossRef] [PubMed]
- Najafi, B.; Crews, R.T.; Wrobel, J.S. Importance of time spent standing for those at risk of diabetic foot ulceration. Diabetes Care 2010, 33, 2448–2450. [Google Scholar] [CrossRef] [PubMed]
- Najafi, B.; Grewal, G.S.; Bharara, M.; Menzies, R.; Talal, T.K.; Armstrong, D.G. Can't Stand the Pressure: The Association Between Unprotected Standing, Walking, and Wound Healing in People With Diabetes. J. Diabetes Sci. Technol. 2017, 11, 657–667. [Google Scholar] [CrossRef] [PubMed]
- Lindemann, U.; Najafi, B.; Zijlstra, W.; Hauer, K.; Muche, R.; Becker, C.; Aminian, K. Distance to achieve steady state walking speed in frail elderly persons. Gait Posture 2008, 27, 91–96. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor-Derived Gait Parameters | Unit | Description |
|---|---|---|
| Toe-off speed | degree/s | Magnitude of angular velocity at toe-off (Figure 1b, 1) |
| Mid swing speed | degree/s | Magnitude of angular velocity at mid swing (Figure 1b, 2) |
| Mid stance speed | degree/s | The magnitude of maximum range of the angular velocity during stance phase (Figure 1b,3) |
| Propulsion duration | second (s) | Duration of time from heel-off to toe-off in a gait cycle (Figure 1b, 4) |
| Propulsion acceleration | degree/s2 | The average angular acceleration (slope) during the propulsion phase (Figure 1b, 5) |
| Speed norm | degree/s | The magnitude of the vector sum of the angular velocity in the transverse and frontal plane |
| Characteristic | Non-Frail (N) (n = 49) | Pre-Frail (P) (n = 92) | Frail (F) (n = 20) | p-Value (η2) | Pairwise Comparison p-Value (d) | ||
|---|---|---|---|---|---|---|---|
| N-P | N-F | P-F | |||||
| Gender + | |||||||
| Male n (%) | 17 (34.7) | 41 (44.6) | 7 (35.0) | 0.260 | 0.981 | 0.433 | |
| Female n (%) | 32 (65.3) | 51 (55.4) | 13 (65.0) | ||||
| Age a, years | 71.2 (±12.1) | 74.6 (±10.3) | 76.5 (±14.3) | 0.141 (0.025) | 0.230 (0.31) | 0.340 (0.41) | 0.850 (0.17) |
| Height, m | 1.66 (±0.09) | 1.67 (±0.12) | 1.60 (±0.12) | 0.023 (0.046) | 0.970 (0.04) | 0.082 (0.66) | 0.052 (0.64) |
| Weight, kg | 73.5 (±15.5) | 81.5 (±21.2) | 67.6 (±14.3) | 0.003 (0.070) | 0.030 (0.41) | 0.271 (0.31) | 0.002 (0.70) |
| BMI, kg/m2 | 26.5 (±5.3) | 29.2 (±6.5) | 26.5 (±5.4) | 0.025 (0.046) | 0.030 (0.43) | 0.990 (0.02) | 0.131 (0.43) |
| History of fall + n (%) | 14 (28.6) | 38 (20.7) | 7 (35.0) | 0.973 | 0.392 | 0.394 | |
| Cognition performance (MMSE) | 29.0 (±1.3) | 28.5 (±1.7) | 27.4 (±3.2) | 0.032 (0.069) | 0.278 (0.19) | 0.009 (0.62) | 0.049 (0.46) |
| Depression (CES-D) | 7.0 (±7.0) | 9.0 (±8.0) | 16.6 (±6.8) | 0.001 (0.15) | 0.215 (0.17) | 0.001 (1.17) | 0.001 (0.88) |
| Concerns for falls (FES-I) | 20.9 (±3.8) | 28.8 (±11.9) | 34.1 (±17.0) | 0.001 (0.15) | 0.001 (0.60) | 0.019 (1.72) | 0.486 (0.43) |
| # of comorbidity | 2.0 (±1.7) | 3.4 (±2.0) | 4.8 (±1.9) | 0.002 (0.166) | 0.071 (0.39) | 0.006 (1.27) | 0.125 (0.65) |
| Gait Parameters | Group | Mean ± Std | p-Value (η2) | Pairwise Comparison | |||
|---|---|---|---|---|---|---|---|
| Group | p-Value (d) | Mean Difference 95% CI | |||||
| Right Sensor | Lower | Upper | |||||
| Propulsion duration (s) | Non-frail | 0.70 ± 0.11 | <0.001 (0.20) | N-P | <0.001 (0.62) | −0.19 | −0.55 |
| Pre-frail | 0.83 ± 0.23 | N-F | 0.003 (1.55) | −0.67 | −0.14 | ||
| Frail | 1.11 ± 0.46 | P-F | 0.036 (1.00) | −0.55 | −0.17 | ||
| Propulsion acceleration (deg/s2) | Non-frail | 366.6 ± 137.5 | <0.001 (0.13) | N-P | 0.035 (0.46) | 3.4 | 115.8 |
| Pre-frail | 306.0 ± 125.4 | N-F | <0.001 (1.28) | 90.6 | 243.1 | ||
| Frail | 198.7 ± 109.8 | P-F | 0.002 (0.87) | 38.8 | 175.8 | ||
| Mid stance speed (deg/s) | Non-frail | 137.6 ± 42.2 | <0.001 (0.10) | N-P | 0.075 (0.42) | −1.2 | 32.2 |
| Pre-frail | 122.1 ± 34.5 | N-F | <0.001 (0.99) | 16.6 | 62.2 | ||
| Frail | 98.2 ± 32.3 | P-F | 0.016 (0.70) | 4.0 | 43.8 | ||
| speed norm (deg/s) | Non-frail | 196.4 ± 53.5 | <0.001 (0.11) | N-P | 0.025 (0.46) | 2.7 | 49.0 |
| Pre-frail | 170.6 ± 57.7 | N-F | 0.003 (1.12) | 22.2 | 112.1 | ||
| Frail | 129.2 ± 3.6 | P-F | 0.067 (0.68) | −2.4 | 85.1 | ||
| Toe-off speed (deg/s) | Non-frail | 149.4 ± 48.2 | <0.001 (0.13) | N-P | 0.003 (0.58) | 9.4 | 52.1 |
| Pre-frail | 118.6 ± 55.3 | N-F | <0.001 (1.32) | 31.4 | 101.9 | ||
| Frail | 82.7 ± 56.1 | P-F | 0.038 (0.65) | 1.8 | 70.1 | ||
| Mid swing speed (deg/s) | Non-frail | 336.9 ± 63.3 | <0.001 (0.20) | N-P | <0.001 (0.73) | 21.2 | 76.0 |
| Pre-frail | 288.3 ± 69.0 | N-F | <0.001 (1.63) | 61.9 | 151.9 | ||
| Frail | 230.0 ± 74.8 | P-F | 0.007 (0.84) | 15.0 | 101.7 | ||
| Left Sensor | |||||||
| Propulsion duration (s) | Non-frail | 0.69 ± 0.10 | <0.001 (0.17) | N-P | <0.001 (0.94) | −0.21 | −0.65 |
| Pre-frail | 0.83 ± 0.25 | N-F | 0.004 (4.02) | −0.63 | −0.12 | ||
| Frail | 1.07 ± 0.45 | P-F | 0.071 (1.83) | −0.50 | 0.19 | ||
| Propulsion acceleration (deg/s2) | Non-frail | 382.8 ± 115.3 | <0.001 (0.12) | N-P | 0.007 (0.60) | 15.8 | 121.0 |
| Prefrail | 314.4 ± 142.3 | N-F | <0.001 (2.21) | 82.2 | 242.9 | ||
| Frail | 220.3 ± 126.5 | P-F | 0.016 (0.94) | 15.4 | 172.8 | ||
| Mid stance speed (deg/s) | Non-frail | 144.1 ± 34.9 | <0.001 (0.10) | N-P | 0.037 (0.33) | 0.8 | 31.9 |
| Pre-frail | 127.8 ± 40.8 | N-F | <0.001 (1.32) | 18.6 | 64.9 | ||
| Frail | 102.4 ± 35.8 | P-F | 0.023 (0.68) | 3.1 | 47.8 | ||
| Speed norm (deg/s) | Non-frail | 198.8 ± 54.8 | <0.001 (0.12) | N-P | 0.041 (0.37) | 0.8 | 48.6 |
| Pre-frail | 174.1 ± 60.5 | N-F | <0.001 (1.56) | 36.4 | 101.9 | ||
| Frail | 129.6 ± 48.9 | P-F | 0.004 (0.85) | 13.4 | 75.4 | ||
| Toe-off speed (deg/s) | Non-frail | 154.2 ± 53.8 | 0.001 (0.08) | N-P | 0.061 (0.34) | −0.8 | 47.6 |
| Pre-frail | 130.8 ± 64.4 | N-F | <0.001 (1.37) | 25.9 | 93.8 | ||
| Frail | 94.4 ± 51.8 | P-F | 0.027 (0.66) | 3.6 | 69.3 | ||
| Mid swing speed (deg/s) | Non-frail | 347.6 ± 58.9 | <0.001 (0.24) | N-P | <0.001 (0.78) | 29.7 | 82.4 |
| Pre-frail | 291.6 ± 69.2 | N-F | <0.001 (2.59 | 72.4 | 176.3 | ||
| Frail | 223.2 ± 85.8 | P-F | 0.007 (1.19) | 17.3 | 119.4 | ||
| Gait Parameters | Shrinking | Weakness | Slowness | Exhaustion | Low Activity | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Right Sensor | rho | p-Value | rho | p-Value | rho | p-Value | rho | p-Value | rho | p-Value |
| Propulsion duration (s) | 0.181 | 0.085 | 0.360 | <0.001 | 0.684 | <0.001 | 0.237 | 0.023 | 0.154 | 0.142 |
| Propulsion acceleration (deg/s2) | −0.141 | 0.180 | −0.257 | 0.013 | −0.645 | <0.001 | −0.200 | 0.056 | −0.168 | 0.109 |
| Mid stance speed (deg/s) | −0.068 | 0.520 | −0.183 | 0.081 | −0.589 | <0.001 | −0.129 | 0.219 | −0.091 | 0.390 |
| Speed norm (deg/s) | 0.061 | 0.561 | −0.330 | 0.001 | −0.543 | <0.001 | −0.248 | 0.017 | −0.212 | 0.043 |
| Toe-off speed (deg/s) | 0.060 | 0.572 | −0.402 | <0.001 | −0.646 | <0.001 | −0.205 | 0.050 | −0.202 | 0.054 |
| Mid swing speed (deg/s) | −0.119 | 0.257 | −0.358 | <0.001 | −0.784 | <0.001 | −0.175 | 0.095 | −0.127 | 0.227 |
| Left Sensor | ||||||||||
| Propulsion duration (s) | 0.094 | 0.370 | 0.386 | <0.001 | 0.732 | <0.001 | 0.241 | 0.021 | 0.119 | 0.261 |
| Propulsion acceleration (deg/s2) | −0.027 | 0.802 | −0.305 | 0.003 | −0.676 | <0.001 | −0.156 | 0.137 | −0.119 | 0.258 |
| Mid stance speed (deg/s) | −0.007 | 0.950 | −0.196 | 0.061 | −0.568 | <0.001 | −0.106 | 0.316 | −0.104 | 0.323 |
| Speed norm (deg/s) | −0.094 | 0.370 | −0.415 | <0.001 | −0.533 | <0.001 | −0.223 | 0.033 | −0.231 | 0.027 |
| Toe-off speed (deg/s) | −0.033 | 0.754 | −0.407 | <0.001 | −0.567 | <0.001 | −0.224 | 0.032 | −0.173 | 0.099 |
| Mid swing speed (deg/s) | −0.126 | 0.231 | −0.369 | <0.001 | −0.724 | <0.001 | −0.176 | 0.093 | −0.112 | 0.287 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahemi, H.; Nguyen, H.; Lee, H.; Najafi, B. Toward Smart Footwear to Track Frailty Phenotypes—Using Propulsion Performance to Determine Frailty. Sensors 2018, 18, 1763. https://doi.org/10.3390/s18061763
Rahemi H, Nguyen H, Lee H, Najafi B. Toward Smart Footwear to Track Frailty Phenotypes—Using Propulsion Performance to Determine Frailty. Sensors. 2018; 18(6):1763. https://doi.org/10.3390/s18061763
Chicago/Turabian StyleRahemi, Hadi, Hung Nguyen, Hyoki Lee, and Bijan Najafi. 2018. "Toward Smart Footwear to Track Frailty Phenotypes—Using Propulsion Performance to Determine Frailty" Sensors 18, no. 6: 1763. https://doi.org/10.3390/s18061763
APA StyleRahemi, H., Nguyen, H., Lee, H., & Najafi, B. (2018). Toward Smart Footwear to Track Frailty Phenotypes—Using Propulsion Performance to Determine Frailty. Sensors, 18(6), 1763. https://doi.org/10.3390/s18061763