Incorporating Worker Awareness in the Generation of Hazard Proximity Warnings


Abstract
:1. Introduction
2. Literature Review
2.1. Injury Prevention at the Construction Stage
2.2. Rules for Proximity-Related Hazards
2.3. Research Gaps and Study Objectives
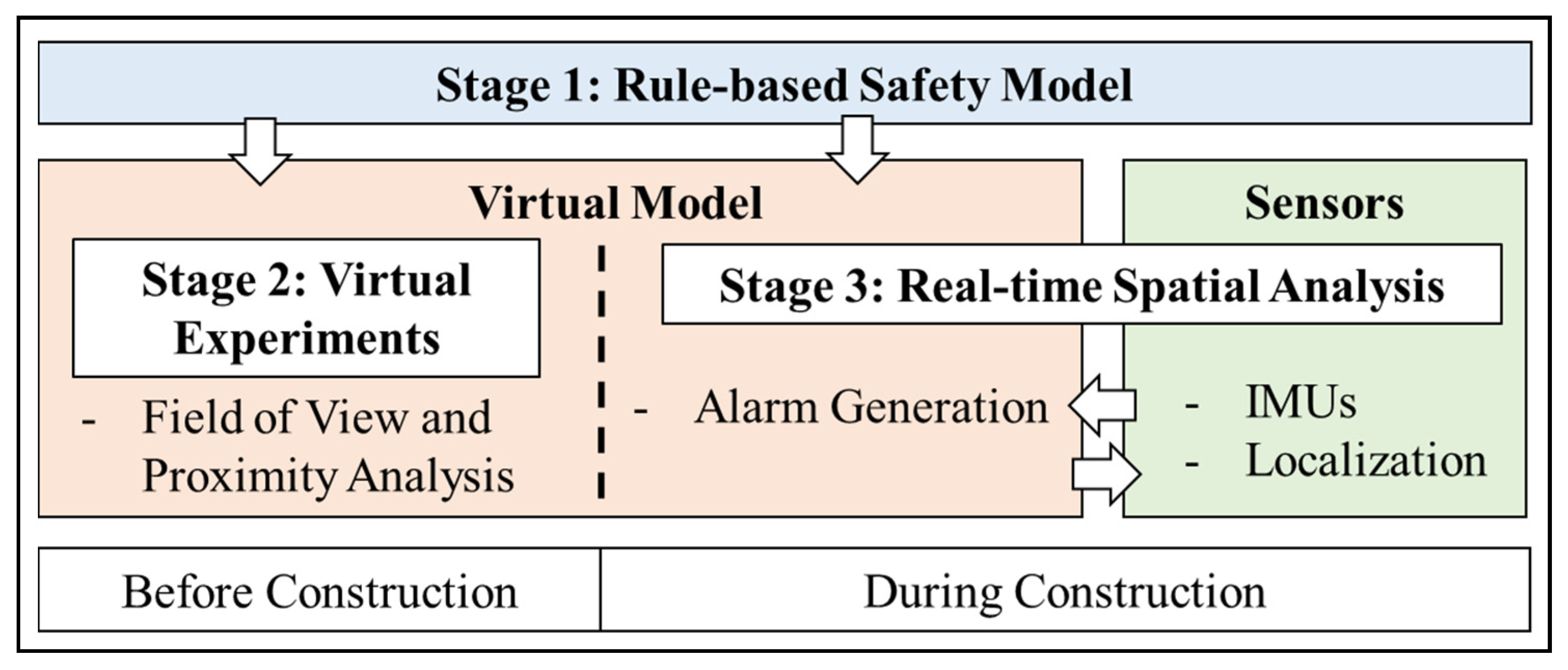
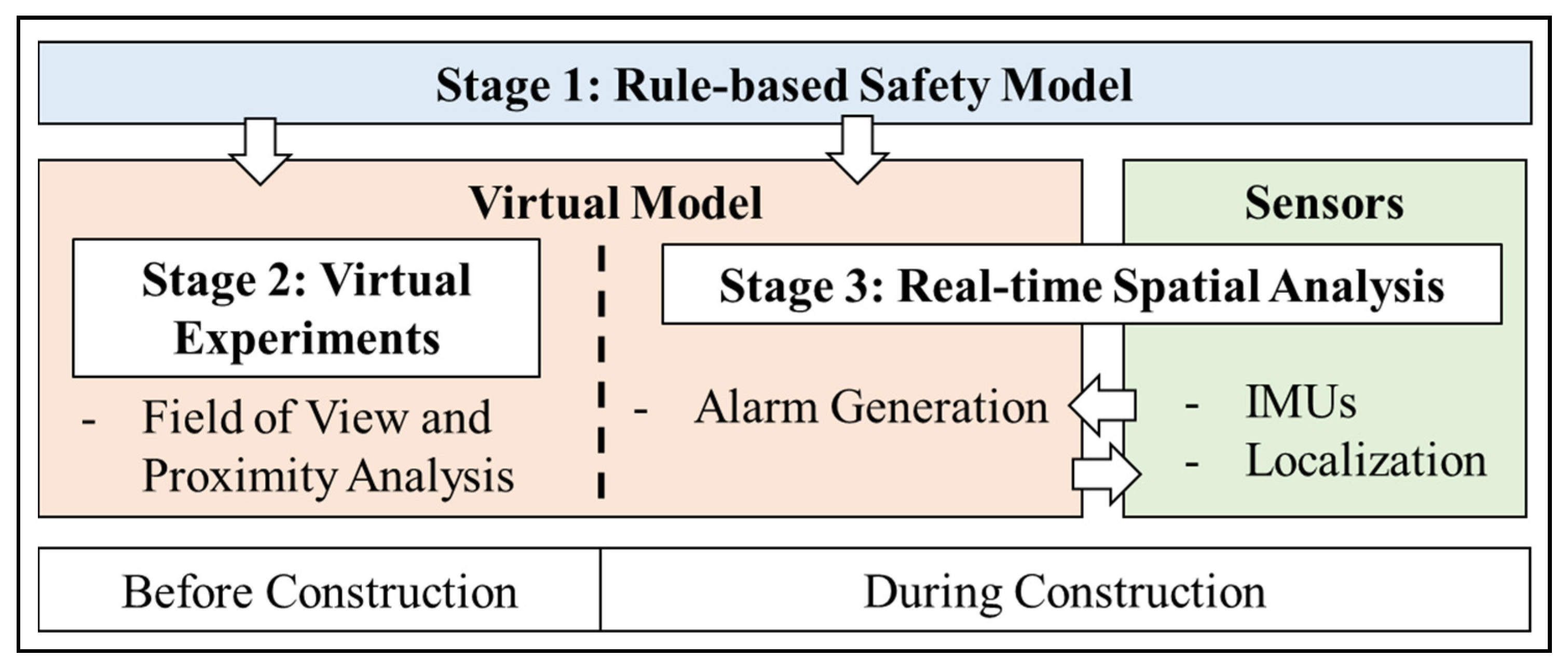
3. Materials and Methods
3.1. Stage 1: Development of a Prescriptive Rule-Based Safety Model
3.2. Stage 2: Pre-Development Virtual Experimentation
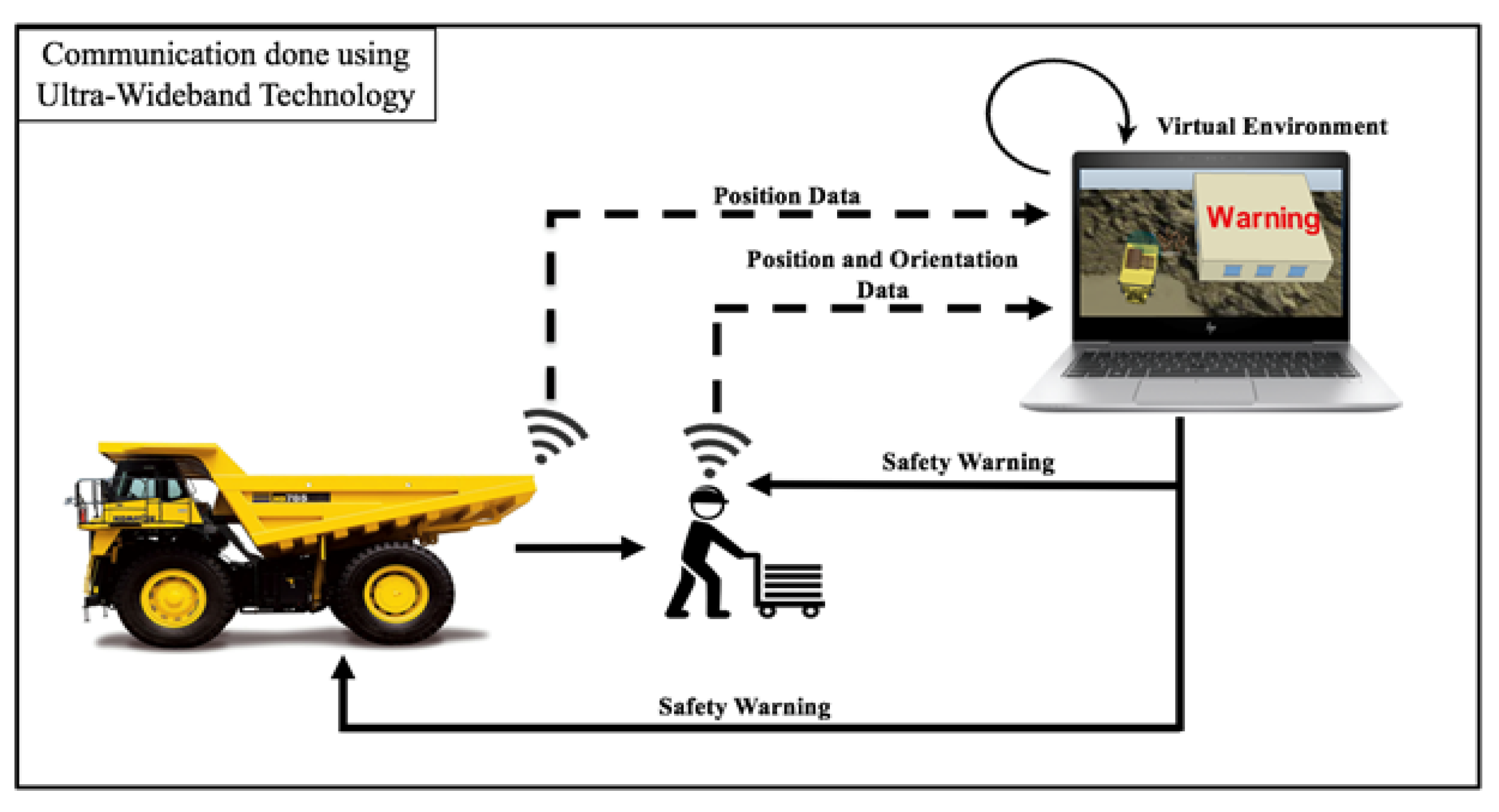
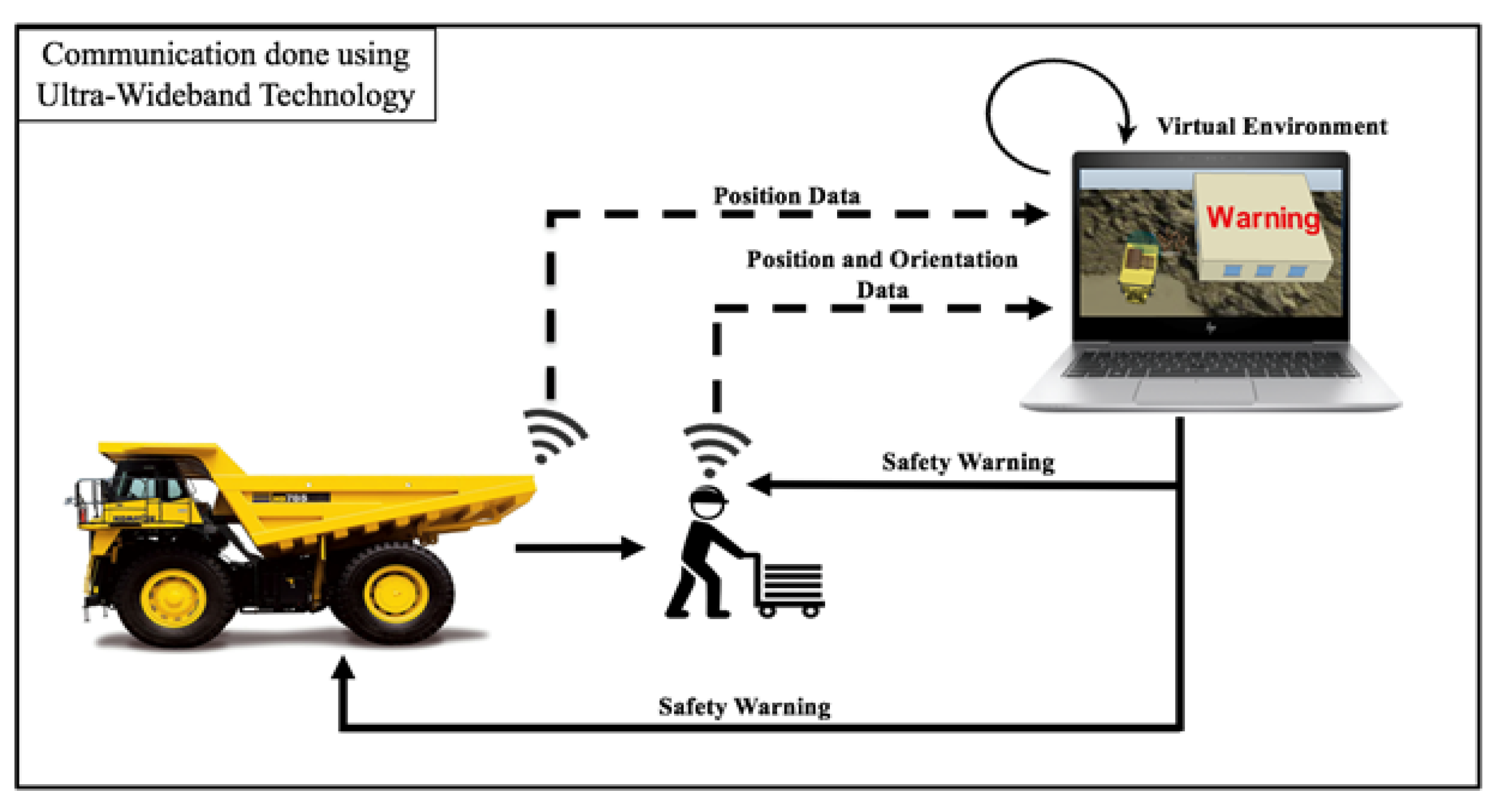
3.3. Stage 3: Enhanced Real-Time Hazard Proximity Warning System
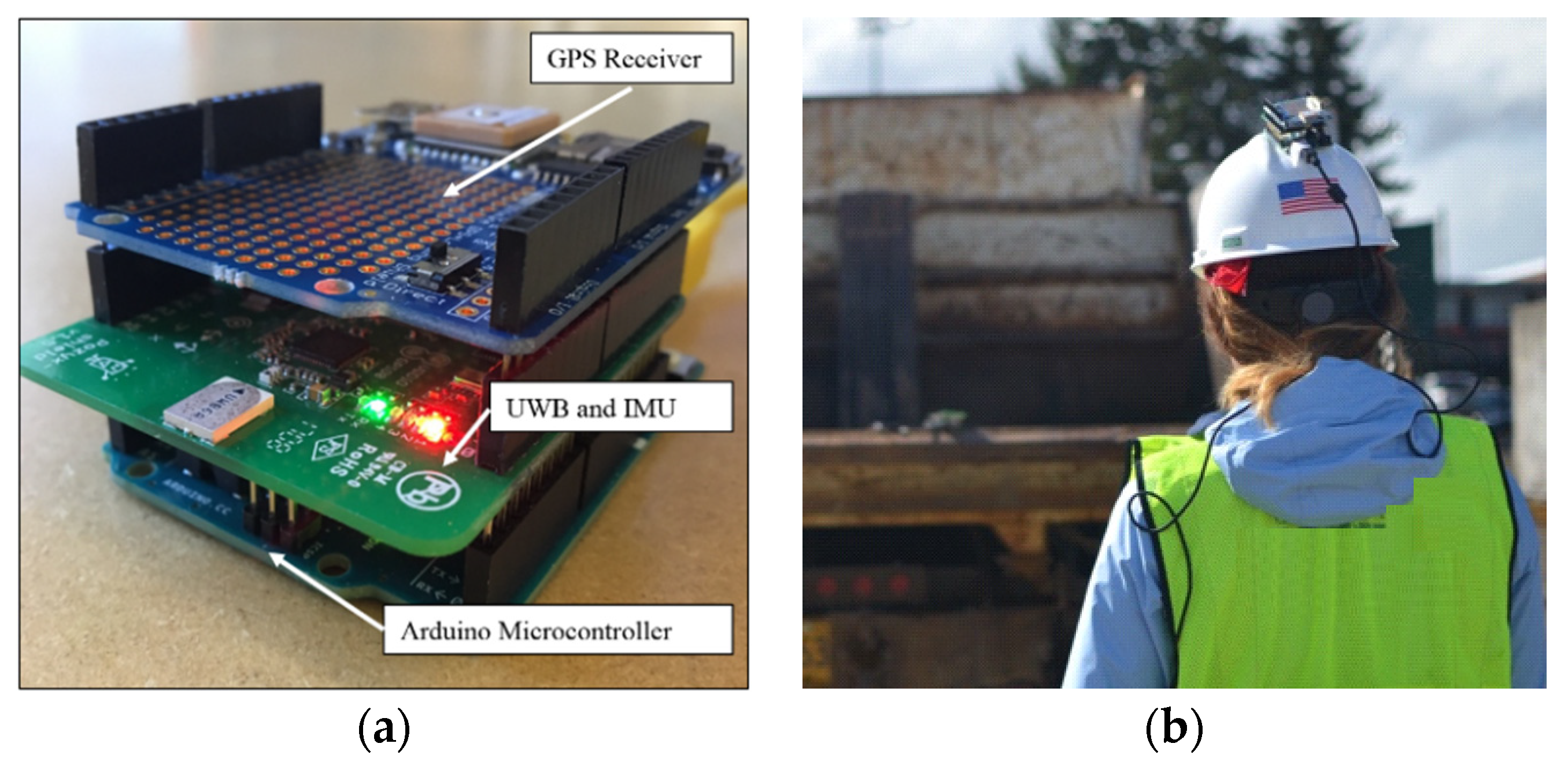
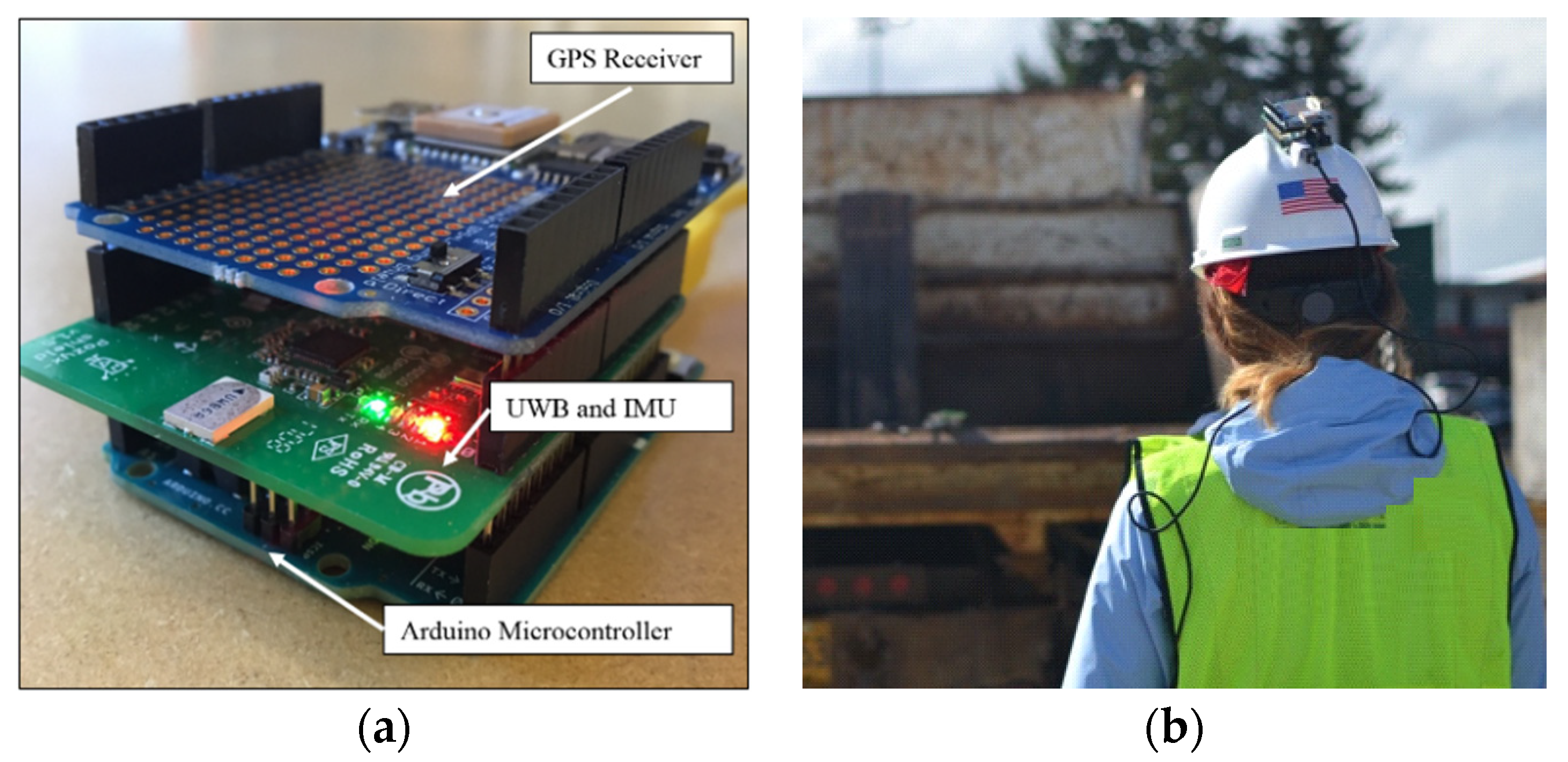
3.3.1. Hardware System for Proximity Warning System
- GPS Module: The GPS module used is the MTK3339 GPS system on a chip which has an update frequency of 10Hz, can track up to 22 satellites on 66 channels, and accuracy of 3m. It operates at a voltage range between 2.8 and 4.3 V. The module was pre-assembled on an Arduino shield that operates under and costs USD 44.95 in the USA.
- IMU Module: The IMU module used is the Bosch BNO055 Intelligent 9-axis absolute orientation sensor that contains a gyroscope, accelerometer, and geomagnetic sensor, and operates under a voltage range from 1.7 to 3.6V and reports orientation at quaternions and Euler angles. It was embedded in the UWB module described below.
- UWB Module: The Decawave DW1000, which is a fully integrated single chip UWB transceiver was used to communicate sensor readings from the GPS and the IMU from the real-world to the virtual model and communicate warnings back. It has a communication range of 100m with speeds of 6.8Mbps and operates at 3.3V. The UWB and the IMU modules were integrated in an Arduino compatible shield manufactured by Pozyx and retails for USD 150.
3.3.2. Spatial Analysis in the Virtual Environment
4. Case Study Experiments and Results
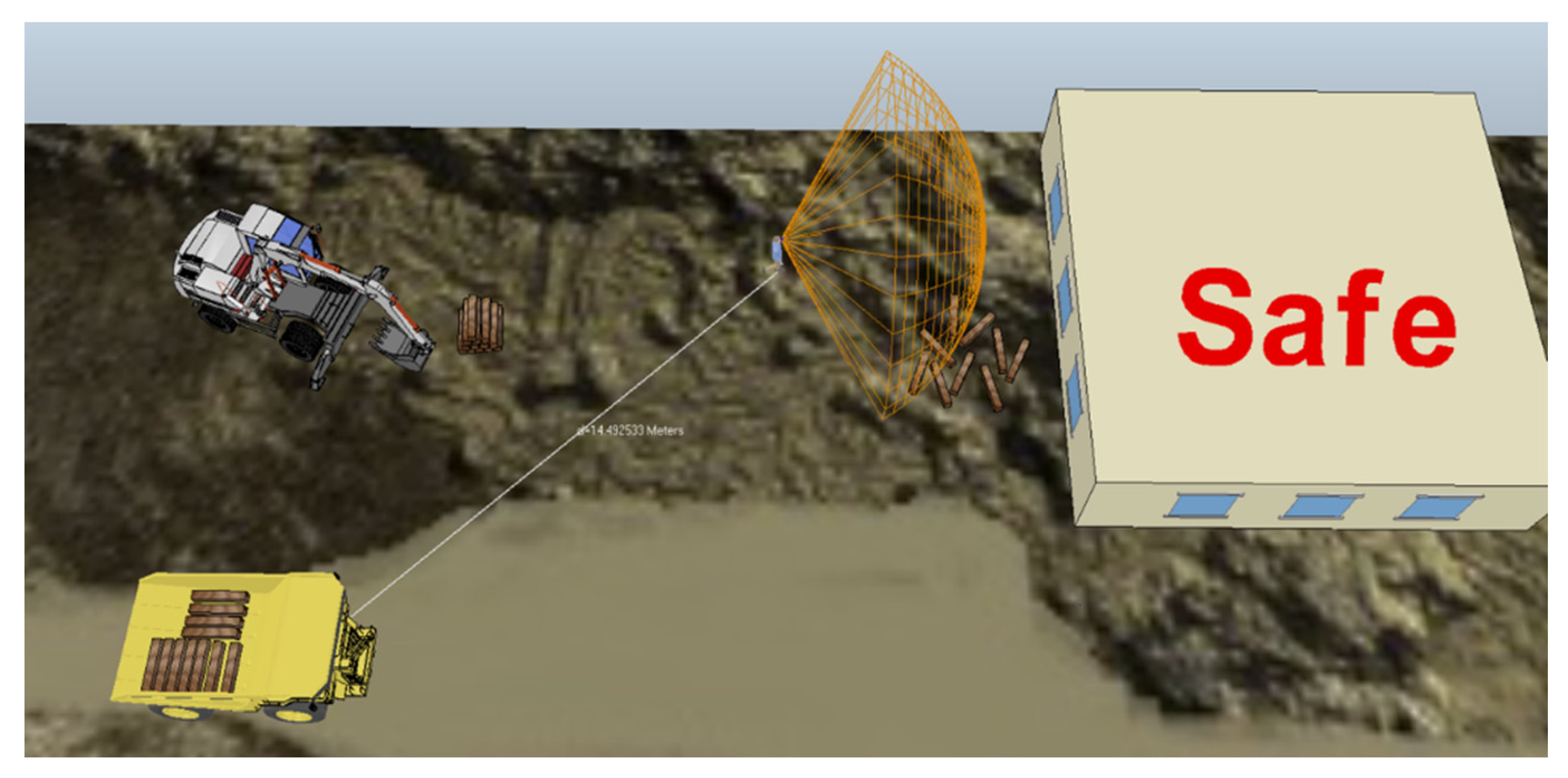
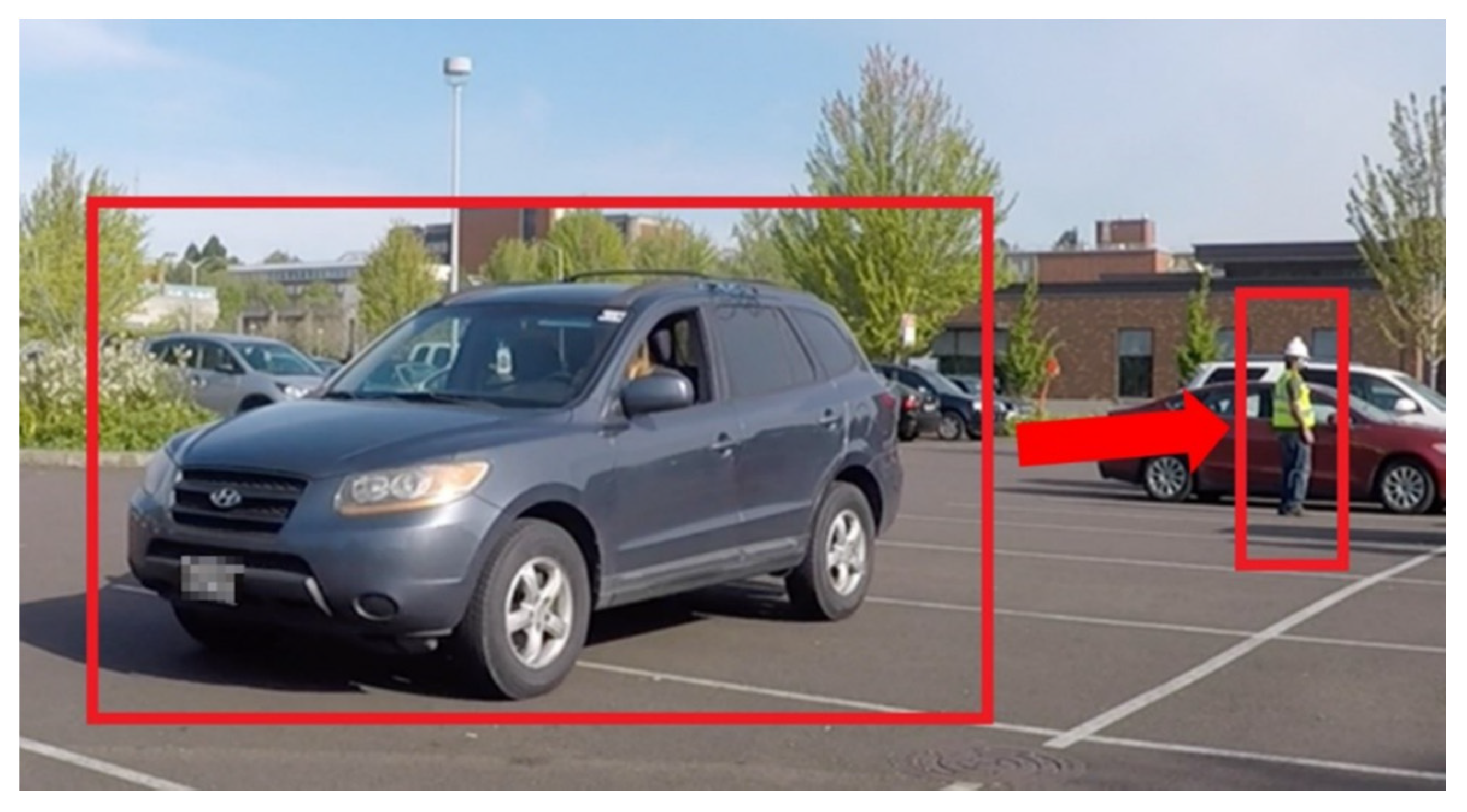
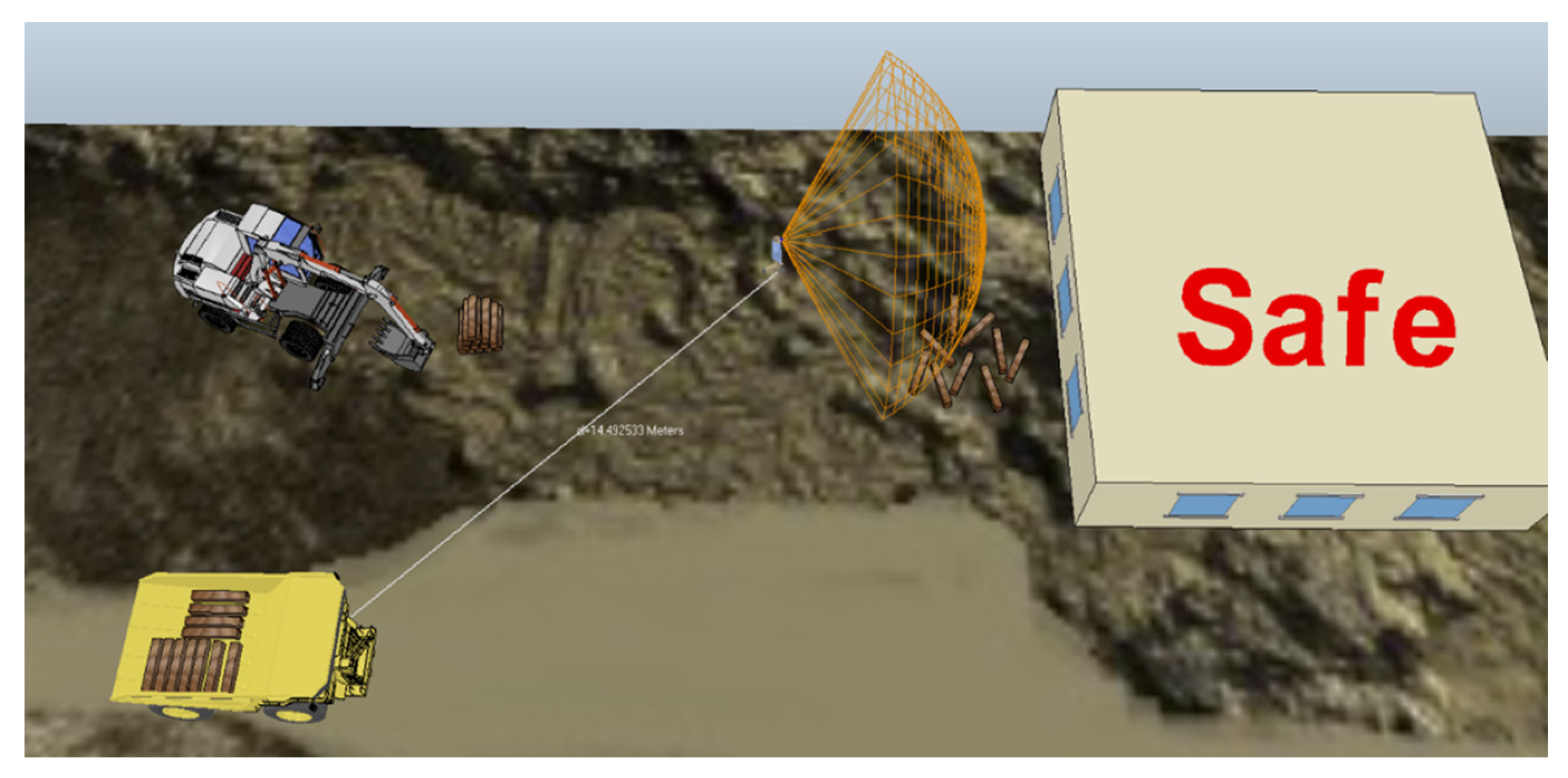
4.1. Virtual Simulation of Equipment Interactions
- The virtual platform enables the analysis of operations to capture safety-related information that would be impossible to obtain from real-world experiments. Such an approach offers the benefits of conducting virtual safety-related experiments, without any exposure to real safety hazards that can result in injury.
- The results of the simulation demonstrate the utility of integrating the field-of-view of workers in reducing the issuance of redundant alarms when the worker has already fixated on or is aware of the hazard. Therefore, the integration of the field-of-view of workers in the generation of these safety alarms can reduce alarm fatigue and unnecessary distractions, which, as discussed earlier, can lead to undesirable outcomes.
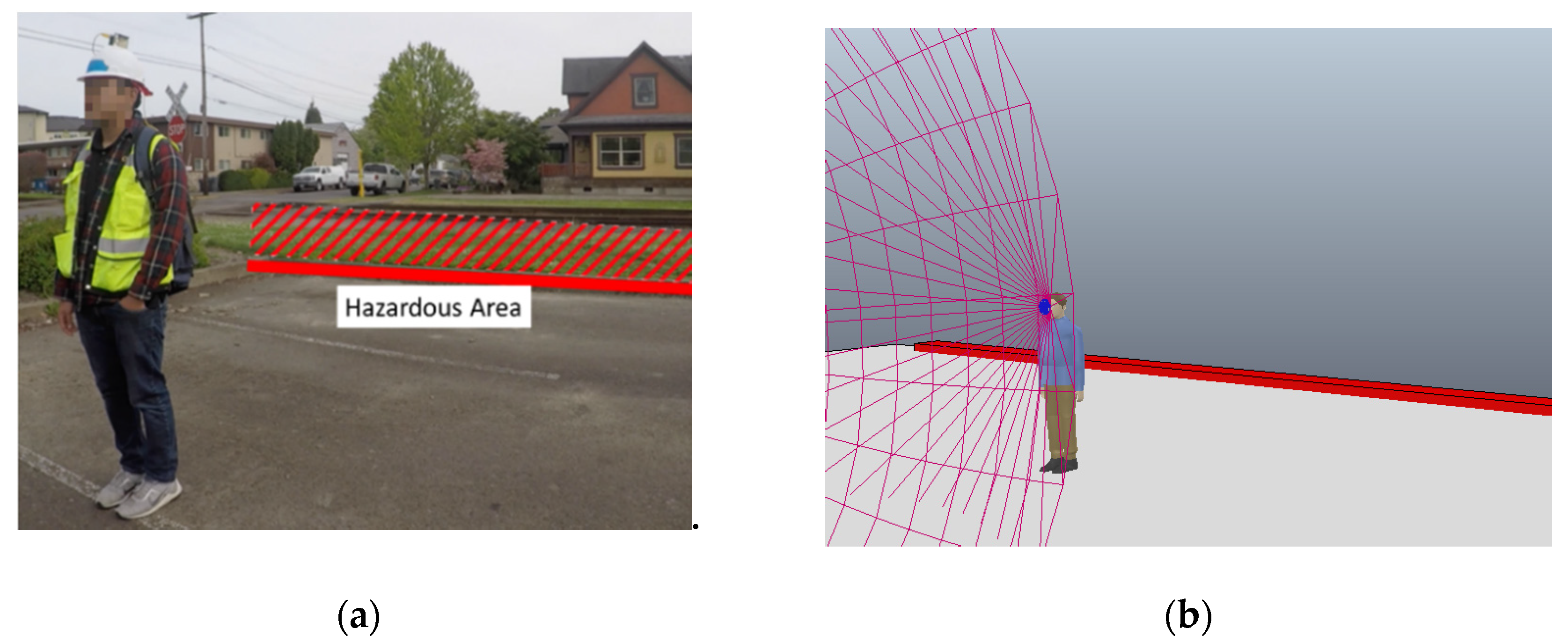
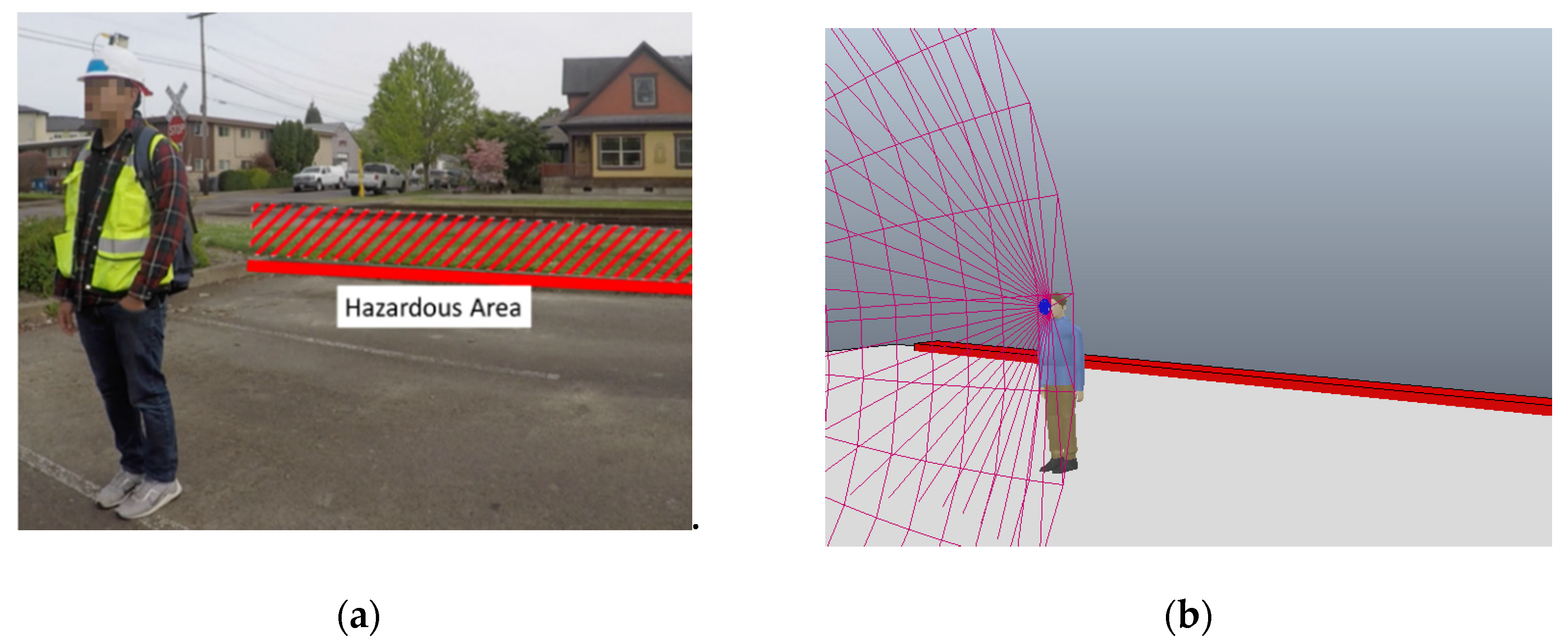
4.2. Case Study I: Simulation of Fall Hazard
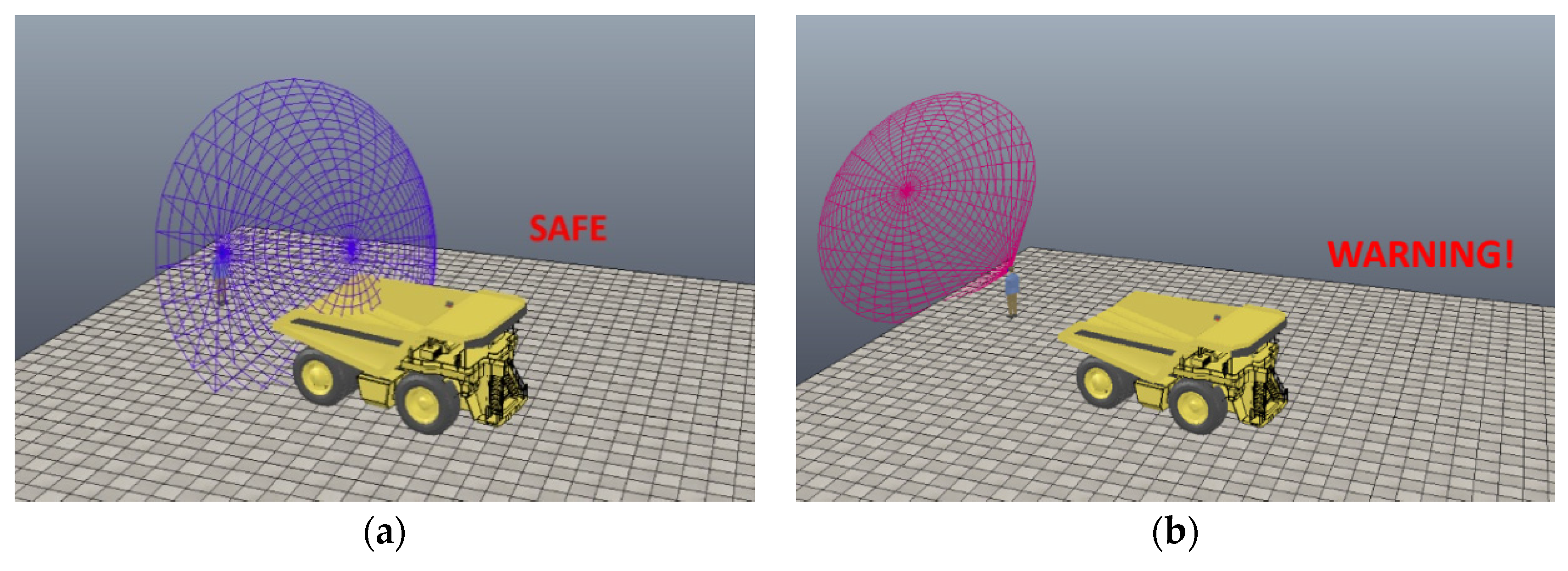
4.3. Case Study II: Simulation of Equipment Hazards
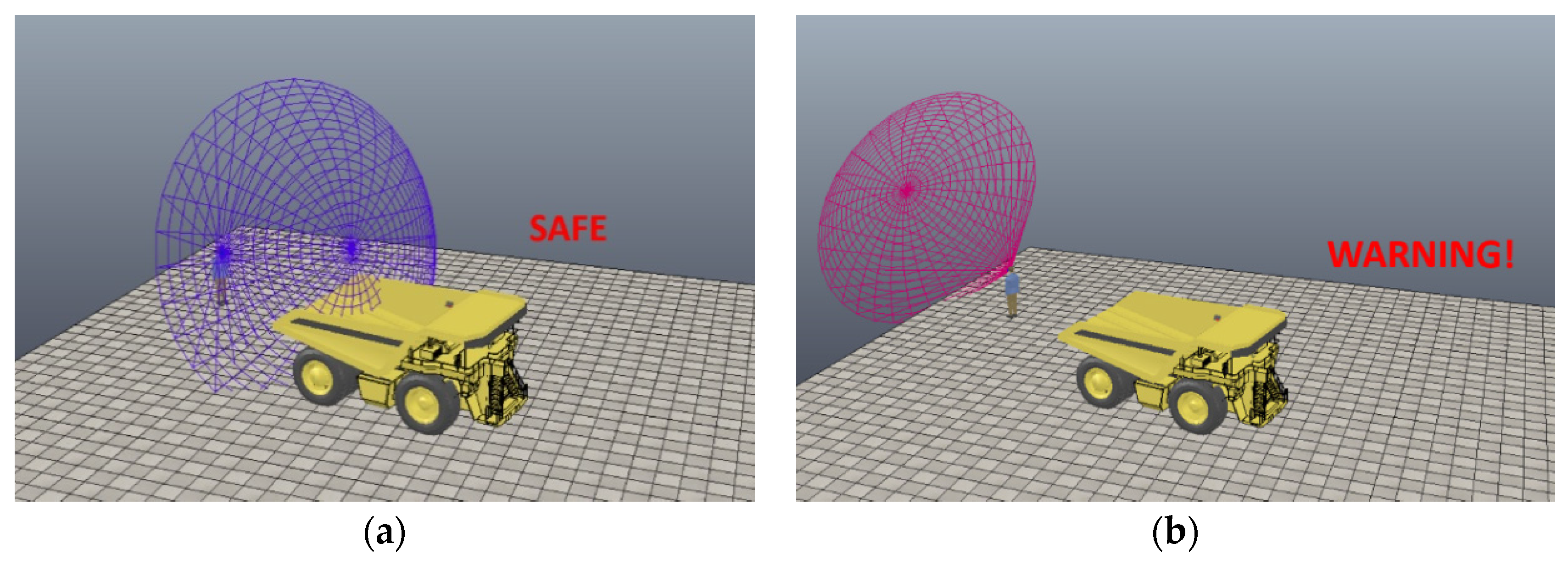
4.3.1. Worker Moving towards Stationary Equipment
4.3.2. Equipment Moving towards Stationary Worker
4.3.3. Non-Stationary Worker and Equipment in Vicinity of Each Other
5. Conclusions
5.1. Contributions of Research
5.2. Limitations of Research
5.3. Recommendations for Future Research
Author Contributions
Funding
Conflicts of Interest
References
- Census of Fatal Occupational Injuries (CFOI)-Current and Revised Data. Available online: https://www.bls.gov/iif/oshcfoi1.htm (accessed on 1 January 2020).
- Occupational Safety and Health Administration (OSHA). Fatality inspection data. Available online: https://www.osha.gov/dep/fatcat/dep_fatcat.html (accessed on 1 January 2020).
- Namian, M.; Albert, A.; Zuluaga, C.M.; Behm, M. Role of Safety Training: Impact on Hazard Recognition and Safety Risk Perception. J. Constr. Eng. Manag. 2016, 142, 4016073. [Google Scholar] [CrossRef]
- Bahn, S. Workplace Hazard Identification and Management: The Case of an Underground Mining Operation. Saf. Sci. 2013, 57, 129–137. [Google Scholar] [CrossRef]
- Jeelani, I.; Albert, A.; Han, K.; Azevedo, R. Are Visual Search Patterns Predictive of Hazard Recognition Performance? Empirical Investigation Using Eye-Tracking Technology. J. Constr. Eng. Manag. 2018, 145, 4018115. [Google Scholar] [CrossRef]
- Garrett, J.W.; Teizer, J. Human Factors Analysis Classification System Relating to Human Error Awareness Taxonomy in Construction Safety. J. Constr. Eng. Manag. 2009, 135, 754–763. [Google Scholar] [CrossRef]
- Haslam, R.A.; Hide, S.A.; Gibb, A.G.F.; Gyi, D.E.; Pavitt, T.; Atkinson, S.; Duff, A.R. Contributing Factors in Construction Accidents. Appl. Ergon. 2005, 36, 401–415. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Namian, M.; Albert, A.; Feng, J. Effect of Distraction on Hazard Recognition and Safety Risk Perception. J. Constr. Eng. Manag. 2018, 144, 4018008. [Google Scholar] [CrossRef]
- Shen, X.; Marks, E.; Pradhananga, N.; Cheng, T. Hazardous Proximity Zone Design for Heavy Construction Excavation Equipment. J. Constr. Eng. Manag. 2016, 142, 5016001. [Google Scholar] [CrossRef]
- Chan, K.; Louis, J. Leveraging Telematics and Real-time Sensor Data to Increase Safety of Equipment-Intensive Construction Operations. In Proceedings of the Canadian Society for Civil Engineering Annual Conference and General Meeting 2017: Leadership in Sustainable Infrastructure, Vancouver, BC, Canada, 31 May–3 June 2017; pp. 328–336. [Google Scholar]
- Rashid, K.M.; Behzadan, A.H. Risk Behavior-Based Trajectory Prediction for Construction Site Safety Monitoring. J. Constr. Eng. Manag. 2017, 144, 4017106. [Google Scholar] [CrossRef]
- Teizer, J.; Allread, B.S.; Fullerton, C.E.; Hinze, J. Autonomous Pro-Active Real-Time Construction Worker and Equipment Operator Proximity Safety Alert System. Autom. Constr. 2010, 19, 630–640. [Google Scholar] [CrossRef]
- Luo, X.; Li, H.; Huang, T.; Rose, T. A Field Experiment of Workers’ Responses to Proximity Warnings of Static Safety Hazards on Construction Sites. Saf. Sci. 2016, 84, 216–224. [Google Scholar] [CrossRef]
- Rashid, K.M.; Datta, S.; Behzadan, A.H. Coupling Risk Attitude and Motion Data Mining in a Preemptive Construction Safety Framework. In Proceedings of the 2017 Winter Simulation Conference, Las Vegas, NV, USA, 3–6 December 2017. [Google Scholar] [CrossRef]
- Marks, E.D.; Teizer, J. Method for Testing Proximity Detection and Alert Technology for Safe Construction Equipment Operation. Constr. Manag. Econ. 2013, 31, 636–646. [Google Scholar] [CrossRef]
- Sendelbach, S.; Funk, M. Alarm Fatigue: A Patient Safety Concern. AACN Adv. Crit. Care 2013, 24, 378–386. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Razavi, S.N. Low False Alarm Rate Model for Unsafe-Proximity Detection in Construction. J. Comput. Civ. Eng. 2015, 30, 4015005. [Google Scholar] [CrossRef]
- West, P.; Abbott, P. Alarm Fatigue: A Concept Analysis. Available online: https://www.himss.org/alarm-fatigue-concept-analysis (accessed on 1 January 2020).
- Solet, J.M.; Barach, P.R. Managing Alarm Fatigue in Cardiac Care. Prog. Pediatr. Cardiol. 2012, 33, 85–90. [Google Scholar] [CrossRef]
- Hasanzadeh, S.; Esmaeili, B.; Dodd, M.D. Impact of Construction Workers’ Hazard Identification Skills on Their Visual Attention. J. Constr. Eng. Manag. 2017, 143, 4017070. [Google Scholar] [CrossRef] [Green Version]
- Ray, S.J.; Teizer, J. Coarse Head Pose Estimation of Construction Equipment Operators to Formulate Dynamic Blind Spots. Adv. Eng. Informatics 2012, 26, 117–130. [Google Scholar] [CrossRef]
- Fang, Y.; Cho, Y.K. Analyzing construction workers’ recognition of hazards by estimating visual focus of attention. In Proceedings of the 6th Int. Conf. on Construction Engineering and Project Management (ICCEPM 2015), Busan, Korea, 11–14 October 2015. [Google Scholar]
- Liu, K.; Luo, Y.; Gyomei, T.E.I.; Yang, S. Attention Recognition of Drivers Based on Head Pose Estimation. In 2008 IEEE Vehicle Power and Propulsion Conference; IEEE: Harbin, China, 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Takahashi, K.; Kadone, H.; Suzuki, K. Head Orientation Sensing by a Wearable Device for Assisted Locomotion. In Proceedings of the 2nd Augmented Human International Conference, Tokyo, Japan, 12–14 March 2011; p. 16. [Google Scholar] [CrossRef]
- Leelasawassuk, T.; Damen, D.; Mayol-Cuevas, W.W. Estimating Visual Attention from a Head Mounted IMU. In Proceedings of the 2015 ACM International Symposium on Wearable Computers, Osaka, Japan, 7–11 September 2015; pp. 147–150. [Google Scholar] [CrossRef] [Green Version]
- Albrechtsen, E.; Solberg, I.; Svensli, E. The Application and Benefits of Job Safety Analysis. Saf. Sci. 2019, 113, 425–437. [Google Scholar] [CrossRef]
- Jebelli, H.; Ahn, C.R.; Stentz, T.L. Comprehensive Fall-Risk Assessment of Construction Workers Using Inertial Measurement Units: Validation of the Gait-Stability Metric to Assess the Fall Risk of Iron Workers. J. Comput. Civ. Eng. 2015, 30, 4015034. [Google Scholar] [CrossRef]
- Yang, K.; Aria, S.; Ahn, C.R.; Stentz, T.L. Automated Detection of Near-Miss Fall Incidents in Iron Workers Using Inertial Measurement Units. In Proceedings of the Construction Research Congress 2014: Construction in a Global Network, Atlanta, GA, USA, 19–21 May 2014; pp. 935–944. [Google Scholar] [CrossRef]
- De Melo, R.R.S.; Costa, D.B.; Álvares, J.S.; Irizarry, J. Applicability of Unmanned Aerial System (UAS) for Safety Inspection on Construction Sites. Saf. Sci. 2017, 98, 174–185. [Google Scholar] [CrossRef]
- Nnaji, C.; Lee, H.W.; Karakhan, A.; Gambatese, J. Developing a Decision-Making Framework to Select Safety Technologies for Highway Construction. J. Constr. Eng. Manag. 2018, 144, 4018016. [Google Scholar] [CrossRef]
- Awolusi, I.; Marks, E.; Hallowell, M. Wearable Technology for Personalized Construction Safety Monitoring and Trending: Review of Applicable Devices. Autom. Constr. 2018, 85, 96–106. [Google Scholar] [CrossRef]
- Park, J.; Kim, K.; Cho, Y.K. Framework of Automated Construction-Safety Monitoring Using Cloud-Enabled BIM and BLE Mobile Tracking Sensors. J. Constr. Eng. Manag. 2016, 143, 5016019. [Google Scholar] [CrossRef]
- Lee, H.-S.; Lee, K.-P.; Park, M.; Baek, Y.; Lee, S. RFID-Based Real-Time Locating System for Construction Safety Management. J. Comput. Civ. Eng. 2011, 26, 366–377. [Google Scholar] [CrossRef]
- Cheng, T.; Mantripragada, U.; Teizer, J.; Vela, P.A. Automated Trajectory and Path Planning Analysis Based on Ultra Wideband Data. J. Comput. Civ. Eng. 2011, 26, 151–160. [Google Scholar] [CrossRef]
- Marks, E.D.; Cheng, T.; Teizer, J. Laser Scanning for Safe Equipment Design That Increases Operator Visibility by Measuring Blind Spots. J. Constr. Eng. Manag. 2013, 139, 1006–1014. [Google Scholar] [CrossRef]
- Pradhananga, N.; Teizer, J. Spatio-Temporal Safety Analysis of Construction Site Operations Using GPS Data. In Proceedings of the Construction Research Congress 2012: Construction Challenges in a Flat World, West Lafayette, IN, USA, 21–23 May 2012; pp. 787–796. [Google Scholar] [CrossRef]
- Zhu, Z.; Park, M.-W.; Koch, C.; Soltani, M.; Hammad, A.; Davari, K. Predicting Movements of Onsite Workers and Mobile Equipment for Enhancing Construction Site Safety. Autom. Constr. 2016, 68, 95–101. [Google Scholar] [CrossRef] [Green Version]
- Maalek, R.; Sadeghpour, F. Accuracy Assessment of Ultra-Wide Band Technology in Locating Dynamic Resources in Indoor Scenarios. Autom. Constr. 2016, 63, 12–26. [Google Scholar] [CrossRef]
- Centers for Disease Control and Prevention (CDC)-Fatality Assessment and Control Evaluation (FACE) Program: NIOSH FACE Reports - NIOSH Workplace Safety and Health Topic. Available online: https://www.cdc.gov/niosh/face/inhouse.html (accessed on 1 January 2020).
- Freese, M.; Singh, S.; Ozaki, F.; Matsuhira, N. Virtual Robot Experimentation Platform V-Rep: A Versatile 3d Robot Simulator. In Proceedings of the International Conference on Simulation, Modeling, and Programming for Autonomous Robots, Brisbane, Australia, 16–19 May 2018; pp. 51–62. [Google Scholar] [CrossRef] [Green Version]
- Louis, J.; Dunston, P.; Martinez, J. Simulating and Visualizing Construction Operations Using Robot Simulators and Discrete Event Simulation. In Proceedings of the 2014 International Conference on Computing in Civil and Building Engineering, Orlando, FL, USA, 23–25 June 2014. [Google Scholar] [CrossRef]
- Strasburger, H.; Rentschler, I.; Jüttner, M. Peripheral Vision and Pattern Recognition: A Review. J. Vis. 2011, 11, 13. [Google Scholar] [CrossRef] [Green Version]
- Construction Industry and its Workers. The Construction Chart Book, 6th ed.; CPWR-The Center for Construction Research and Training: Silver Spring, MD, USA, 2018. [Google Scholar]
- Dong, X.S.; Wang, X.; Katz, R.; West, G.; Bunting, J. Fall Injuries and Prevention in the Construction Industry. Available online: https://stacks.cdc.gov/view/cdc/81140/cdc_81140_DS1.pdf (accessed on 1 January 2020).
- Construction Industry and its Workers. The Construction Chart Book, 5th ed.; CPWR-The Center for Construction Research and Training: Silver Spring, MD, USA, 2013. [Google Scholar]
- Rashid, K.M.; Louis, J. Construction Equipment Activity Recognition from IMUs Mounted on Articulated Implements and Supervised Classification. In Computing in Civil Engineering 2019: Smart Cities, Sustainability, and Resilience; American Society of Civil Engineers: Reston, VA, USA, 2019; pp. 130–138. [Google Scholar] [CrossRef]
- Rashid, K.M.; Louis, J. Times-Series Data Augmentation and Deep Learning for Construction Equipment Activity Recognition. Adv. Eng. Informatics 2019, 42, 100944. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Illustrative Application in Construction | Applicability to Current Research Problem |
| Global Positioning System (GPS) | Warning generation based on proximity to equipment hazards [11] and to static hazards [13] | GPS localization is appropriate for tracking resources outdoors. |
| Sensor type | Illustrative Application in Construction | Applicability to Current Research Problem |
| GPS-aided Inertial Measurement Unit (IMU) | Warning generation based on proximity to equipment, as well as heading and speed of equipment [17] | The use of GPS-aided IMU reduces false positive warning when the equipment is moving away from worker, but this does not consider user awareness. |
| Bluetooth Low Energy (BLE)-based localization | Proximity warnings for static indoor hazards [32] | Requires the use of static beacons on the site which need to be manually registered. This makes it unsuitable for outdoor and dynamically evolving environments. |
| Radio Frequency Identification (RFID)-based localization | Real-time resource tracking for construction safety management [33] | RFID localization required multiple readers which need to be manually registered with the site and is therefore not suitable for outdoor worksites that are dynamically changing. |
| Ultra-wideband (UWB) | Automated tracking of resources indoors for safety monitoring [34,38] | This technique also requires manual registration of anchors for trilateration of tag and is therefore not suitable for outdoor worksites that are dynamically changing. |
| Vison-based | Warning generation based on proximity to equipment hazards [37] | The presence of occlusions can render this class of techniques unsuitable in dynamic environments. |
| Inertial Measurement Unit (IMU) | Assessing gait stability [27] and detect near-miss fall [28] | These applications do not use IMUs for localization, but rather to capture motion patterns. IMUs are not suitable for localization due to drift error. |
| Range-camera awareness tracking | Estimating head orientation of equipment operator to determine their direction of gaze [21] | Range camera and camera can be mounted on equipment, but is unsuitable for tracking worker |
| Camera-based awareness tracking | Determining attention direction of drivers [23] | |
| Inertial Measurement Unit (IMU) | Head-mounted IMU was used to determine worker’s visual focus of attention [22] | Appropriate for tracking the awareness and gaze direction of workers on foot. |
| Type of Warning System | Number of Warnings | Percentage |
|---|---|---|
| Distance only | 71 | 100% |
| Distance and worker field-of-view | 16 | 22.54% |
| Redundant alarms | 55 | 77.46% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chan, K.; Louis, J.; Albert, A. Incorporating Worker Awareness in the Generation of Hazard Proximity Warnings. Sensors 2020, 20, 806. https://doi.org/10.3390/s20030806
Chan K, Louis J, Albert A. Incorporating Worker Awareness in the Generation of Hazard Proximity Warnings. Sensors. 2020; 20(3):806. https://doi.org/10.3390/s20030806
Chicago/Turabian StyleChan, Kelsey, Joseph Louis, and Alex Albert. 2020. "Incorporating Worker Awareness in the Generation of Hazard Proximity Warnings" Sensors 20, no. 3: 806. https://doi.org/10.3390/s20030806
APA StyleChan, K., Louis, J., & Albert, A. (2020). Incorporating Worker Awareness in the Generation of Hazard Proximity Warnings. Sensors, 20(3), 806. https://doi.org/10.3390/s20030806