Feedback from HTC Vive Sensors Results in Transient Performance Enhancements on a Juggling Task in Virtual Reality


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
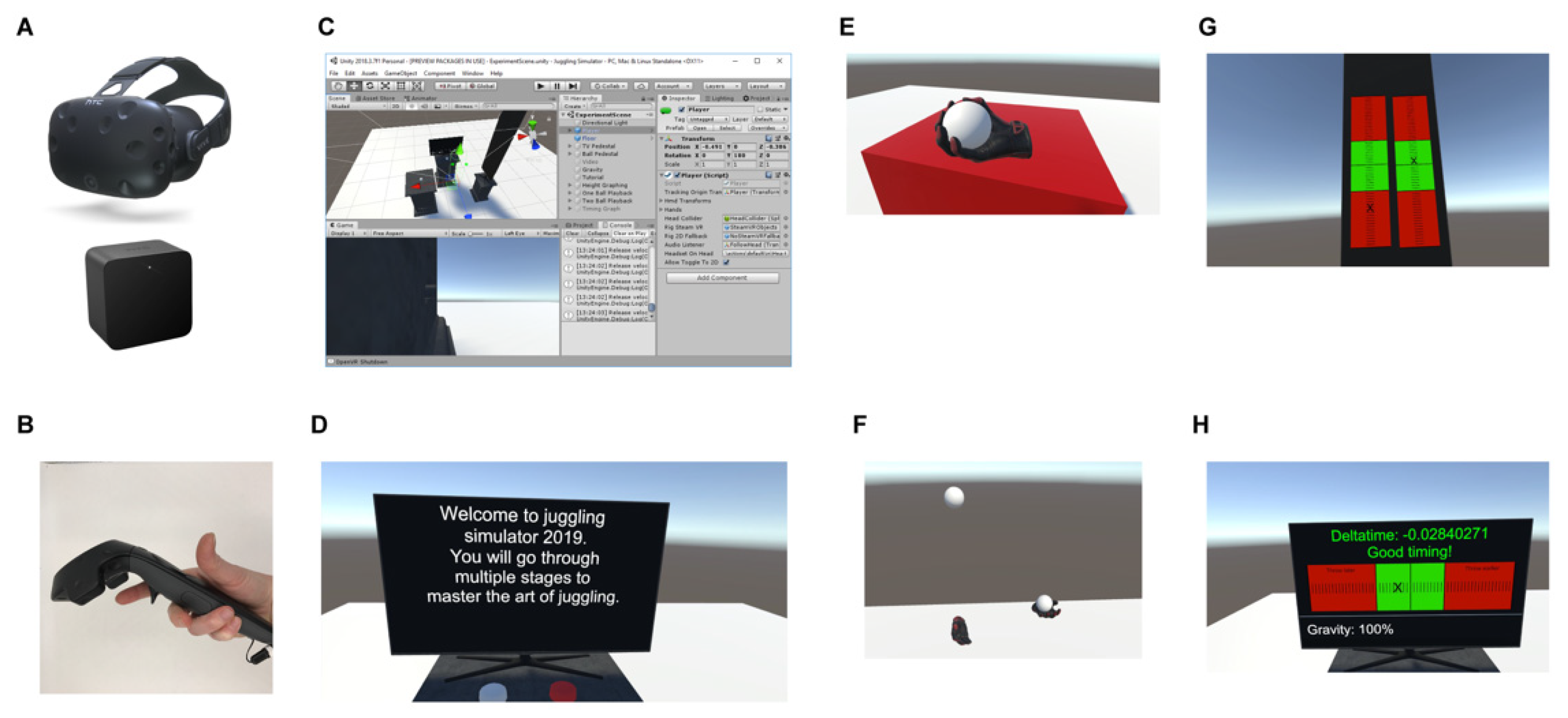
2.2. Materials
2.3. Creating the Virtual Reality Environment
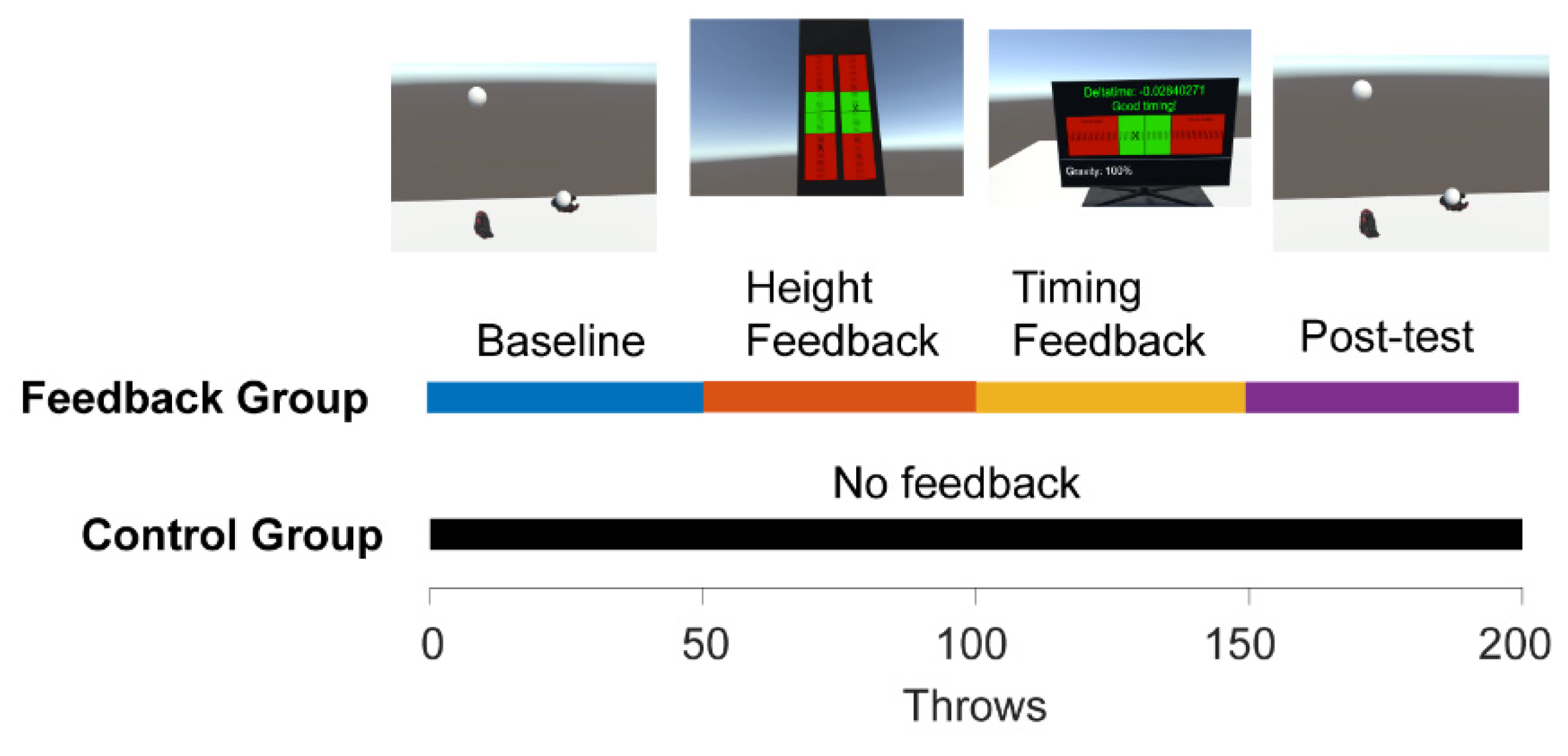
2.4. Procedure
2.5. Measures
3. Results
3.1. Analysis
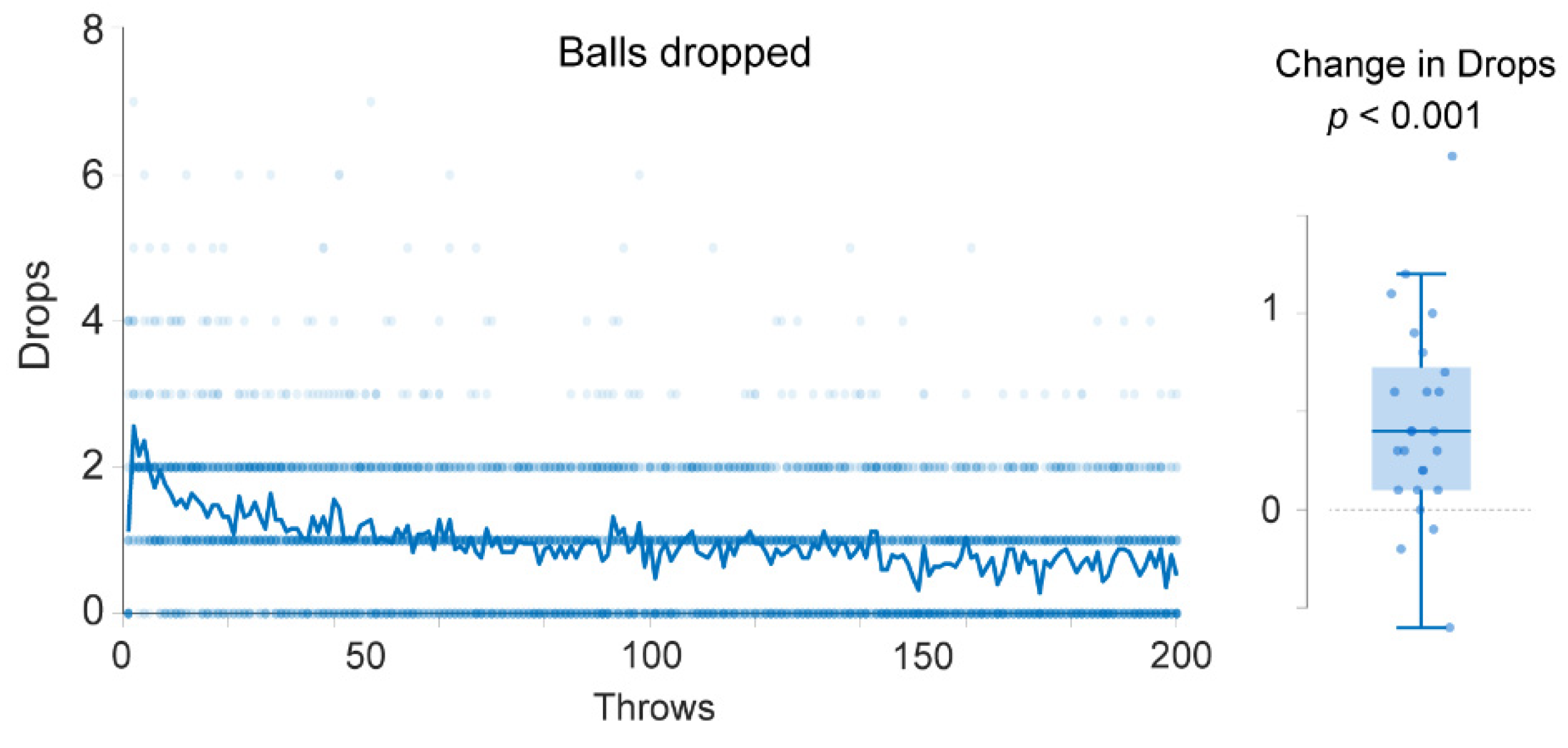
3.2. Drops
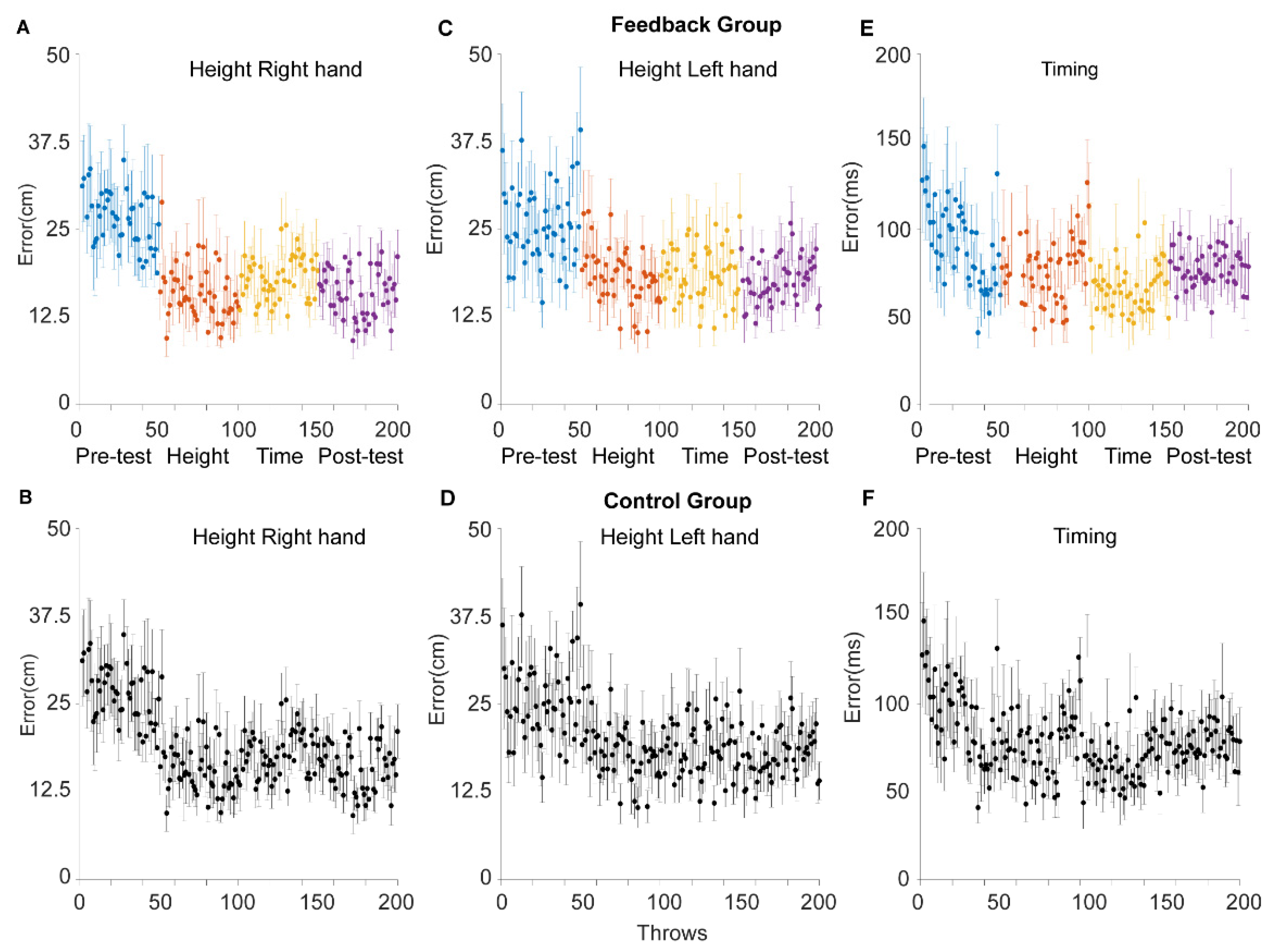
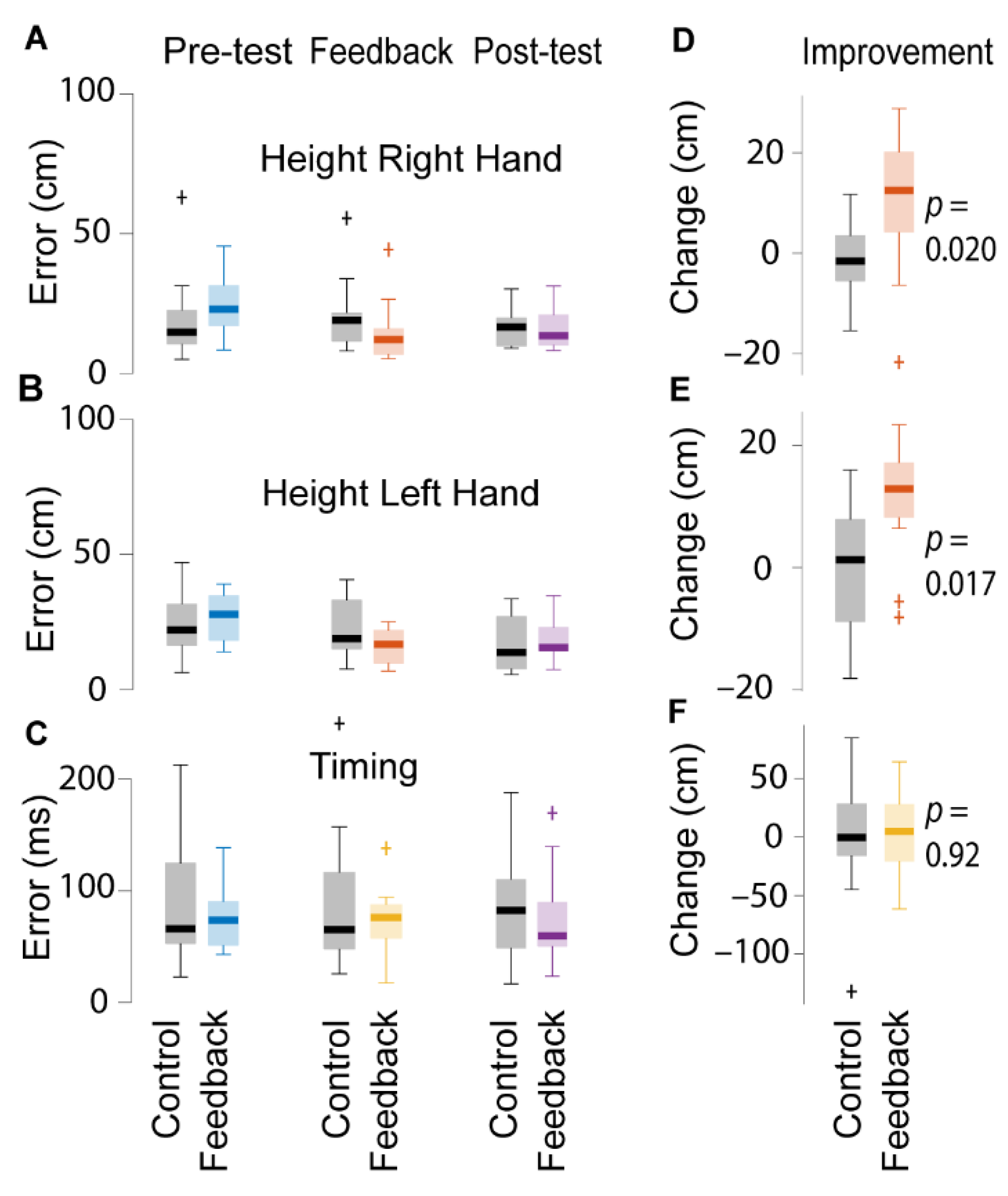
3.3. Height
3.4. Timing
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pettersen, V.; Westgaard, R.H. Muscle activity in professional classical singing: A study on muscles in the shoulder, neck and trunk. Logoped. Phoniatr. Vocol. 2004, 29, 56–65. [Google Scholar] [CrossRef] [PubMed]
- Yasuda, K.; Saichi, K.; Iwata, H. Haptic-based perception-empathy biofeedback enhances postural motor learning during high-cognitive load task in healthy older adults. Front. Med. 2018, 5, 149. [Google Scholar] [CrossRef] [PubMed]
- Rouhana, J.; Ferry, F.; Toussaint, L.; Boulinguez, P. Knowledge of results and explicit instruction: Efficiency of learning the crawl stroke in swimming. Percept. Mot. Skills 2002, 95, 895–896. [Google Scholar] [CrossRef]
- Rasmussen, A.; Jirenhed, D.-A. Learning and timing of voluntary blink responses match eyeblink conditioning. Sci. Rep. 2017, 7, 3404. [Google Scholar] [CrossRef] [PubMed]
- Schoeller, F.; Bertrand, P.; Gerry, L.J.; Jain, A.; Horowitz, A.H.; Zenasni, F. Combining virtual reality and biofeedback to foster empathic abilities in humans. Front. Psychol. 2018, 9, 2741. [Google Scholar] [CrossRef] [PubMed]
- McMillan, K.; Flood, K.; Glaeser, R. Virtual reality, augmented reality, mixed reality, and the marine conservation movement. Aquat. Conserv. 2017, 27, 162–168. [Google Scholar] [CrossRef]
- Niehorster, D.C.; Li, L.; Lappe, M. The Accuracy and precision of position and orientation tracking in the HTC vive virtual reality system for scientific research. Iperception 2017, 8, 2041669517708205. [Google Scholar] [CrossRef]
- Borrego, A.; Latorre, J.; Alcañiz, M.; Llorens, R. Comparison of oculus rift and htc vive: Feasibility for virtual reality-based exploration, navigation, exergaming, and rehabilitation. Games Health J. 2018, 7, 151–156. [Google Scholar] [CrossRef]
- Sloane, N.J.A.; Wyner, A.D. Scientific aspects of juggling. In Claude E. Shannon: Collected Papers; Wiley-IEEE Press: Hoboken, NJ, USA, 1993; pp. 850–864. [Google Scholar] [CrossRef]
- Scholz, J.; Klein, M.C.; Behrens, T.E.J.; Johansen-Berg, H. Training induces changes in white-matter architecture. Nat. Neurosci. 2009, 12, 1370–1371. [Google Scholar] [CrossRef]
- Beek, P.J.; Lewbel, A. The science of juggling. Sci. Am. 1995, 273, 92–97. [Google Scholar] [CrossRef]
- Sánchez García, R.; Hayes, S.J.; Williams, A.M.; Bennett, S.J. Multisensory perception and action in 3-ball cascade juggling. J. Mot. Behav. 2013, 45, 29–36. [Google Scholar] [CrossRef] [PubMed]
- van Santvoord, A.A.M.; Beek, P.J. Phasing and the pickup of optical information in cascade juggling. Ecol. Psychol. 1994, 6, 239–263. [Google Scholar] [CrossRef]
- Anglin, J.M.; Sugiyama, T.; Liew, S.-L. Visuomotor adaptation in head-mounted virtual reality versus conventional training. Sci. Rep. 2017, 7, 45469. [Google Scholar] [CrossRef] [PubMed]
- Anglin, J.; Saldana, D.; Schmiesing, A.; Liew, S. Transfer of a skilled motor learning task between virtual and conventional environments. In Proceedings of the 2017 IEEE Virtual Reality (VR), Los Angeles, CA, USA, 18–22 March 2017; pp. 401–402. [Google Scholar]
- Adamovich, S.V.; Fluet, G.G.; Tunik, E.; Merians, A.S. Sensorimotor training in virtual reality: A review. NeuroRehabilitation 2009, 25, 29–44. [Google Scholar] [CrossRef]
- Drew, S.A.; Awad, M.F.; Armendariz, J.A.; Gabay, B.; Lachica, I.J.; Hinkel-Lipsker, J.W. The trade-off of virtual reality training for dart throwing: A facilitation of perceptual-motor learning with a detriment to performance. Front. Sports Act. Living 2020, 2, 59. [Google Scholar] [CrossRef] [PubMed]
- Levac, D.E.; Huber, M.E.; Sternad, D. Learning and transfer of complex motor skills in virtual reality: A perspective review. J. Neuroeng. Rehabil. 2019, 16, 121. [Google Scholar] [CrossRef]
- Nickl, R.W.; Ankarali, M.M.; Cowan, N.J. Complementary spatial and timing control in rhythmic arm movements. J. Neurophysiol. 2019, 121, 1543–1560. [Google Scholar] [CrossRef]
- Quadrado, V.H.; da Silva, T.D.; Favero, F.M.; Tonks, J.; Massetti, T.; de Monteiro, C.B. Motor learning from virtual reality to natural environments in individuals with Duchenne muscular dystrophy. Disabil. Rehabil. Assist. Technol. 2019, 14, 12–20. [Google Scholar] [CrossRef]
- Levac, D.E.; Sveistrup, H. Motor learning and virtual reality. In Virtual Reality for Physical and Motor Rehabilitation; Weiss, P.L., Keshner, E.A., Levin, M.F., Eds.; Springer: New York, NY, USA, 2014; pp. 25–46. ISBN 9781493909681. [Google Scholar]
- Meyer, B.; Gruppe, P.; Cornelsen, B.; Stratmann, T.C.; Gruenefeld, U.; Boll, S. Juggling 4.0: Learning Complex motor skills with augmented reality through the example of juggling. In Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology Adjunct Proceedings; ACM: New York, NY, USA, 2018; pp. 54–56. [Google Scholar]
- Hart, S.G. Nasa-Task Load Index (NASA-TLX); 20 years later. Proc. Hum. Fact. Ergon. Soc. Annu. Meet. 2006, 50, 904–908. [Google Scholar] [CrossRef]
- Jost, T.A.; Drewelow, G.; Koziol, S.; Rylander, J. A quantitative method for evaluation of 6 degree of freedom virtual reality systems. J. Biomech. 2019, 97, 109379. [Google Scholar] [CrossRef] [PubMed]
- Spitzley, K.A.; Karduna, A.R. Feasibility of using a fully immersive virtual reality system for kinematic data collection. J. Biomech. 2019, 87, 172–176. [Google Scholar] [CrossRef] [PubMed]
- Krueger, C.; Tian, L. A comparison of the general linear mixed model and repeated measures ANOVA using a dataset with multiple missing data points. Biol. Res. Nurs. 2004, 6, 151–157. [Google Scholar] [CrossRef] [PubMed]
- Holden, M.K. Virtual environments for motor rehabilitation: Review. Cyberpsychol. Behav. 2005, 8, 187–211. [Google Scholar] [CrossRef] [PubMed]
- Therrien, A.S.; Wolpert, D.M.; Bastian, A.J. Increasing motor noise impairs reinforcement learning in healthy individuals. eNeuro 2018, 5. [Google Scholar] [CrossRef]
- Therrien, A.S.; Wolpert, D.M.; Bastian, A.J. Effective reinforcement learning following cerebellar damage requires a balance between exploration and motor noise. Brain 2016, 139, 101–114. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borglund, F.; Young, M.; Eriksson, J.; Rasmussen, A. Feedback from HTC Vive Sensors Results in Transient Performance Enhancements on a Juggling Task in Virtual Reality. Sensors 2021, 21, 2966. https://doi.org/10.3390/s21092966
Borglund F, Young M, Eriksson J, Rasmussen A. Feedback from HTC Vive Sensors Results in Transient Performance Enhancements on a Juggling Task in Virtual Reality. Sensors. 2021; 21(9):2966. https://doi.org/10.3390/s21092966
Chicago/Turabian StyleBorglund, Filip, Michael Young, Joakim Eriksson, and Anders Rasmussen. 2021. "Feedback from HTC Vive Sensors Results in Transient Performance Enhancements on a Juggling Task in Virtual Reality" Sensors 21, no. 9: 2966. https://doi.org/10.3390/s21092966
APA StyleBorglund, F., Young, M., Eriksson, J., & Rasmussen, A. (2021). Feedback from HTC Vive Sensors Results in Transient Performance Enhancements on a Juggling Task in Virtual Reality. Sensors, 21(9), 2966. https://doi.org/10.3390/s21092966