1. Introduction
Sensor network generally consists of multiple sensor nodes and a sink node, where sensor nodes monitor and measure physical information such as temperature, humidity, pressure, movement of any object,
etc. [
1,
2]. Sensed information is transferred from sensor nodes to a sink node via multi-hop routing and it is finally delivered to the central management system.
In sensor network, sensor nodes should perform a sensing task for a long time (e.g., lasting a few years) and the battery of them cannot be replaced in most practical situations. Therefore, energy conservation or power control is considered as one of the most critical issues in sensor network in order to guarantee a certain level of performance [
3]. It is also widely accepted that energy consumption due to communication is much higher than that due to either sensing information or processing sensed information [
4,
5]. Regarding energy consumption due to communication, just listening communication interface also consumes comparable power to receiving data and it is reported that the ratio of energy consumption among listening, receiving, and transmitting data is about 1, 1, and 1.5, respectively [
5,
6]. Therefore, it is important to put communication interface of sensor nodes in low power
sleep state when communication between neighbor sensor nodes is not required, in order to save energy [
7].
In order to extend the lifetime of sensor nodes, numerous works have been carried out and most algorithms proposed in these works mainly use duty cycling, data-driven approaches, and mobility [
4]. Duty cycling achieves energy conservation by putting unused communication interface of sensor nodes in low power
sleep state as long as possible. Data-driven approaches reduce the number of sampled data by eliminating redundant data delivery to the sink node using correlation property between sampled data [
8]. The energy consumption of sensor nodes can be reduced further if mobile nodes moving around sensor network can be used for data collection, and thus, sensor nodes just route their data to the mobile nodes via direct or limited multi-hop routing [
9].
Out of these schemes, duty cycling scheme is considered the most suitable power conservation technique [
4] and we only focus on energy conservation schemes based on duty cycling in this paper. In [
4], the authors classify duty cycling as topology control and power management. In topology control, redundancy of sensor nodes is used and only a subset of sensor nodes are activated, while maintaining network connectivity, and the other sensor nodes are deactivated for power saving [
10–
12]. Thus, it is important to decide which sensor nodes should be activated or deactivated in topology control.
Power management deals with activated sensor nodes and transitions between states having different levels of power consumption, such as
sleep,
listen, and
active states, are controlled for efficient power conservation [
13–
15]. In power management, sensor nodes initially stay in
sleep state when communication is not required, by putting communication interface in the low power
sleep state. In order to check any incoming data, a sensor node periodically wakes up at the expiration of
sleep timer by moving into
listen state and listens to the radio interface. In
listen state, if there is no incoming data until the expiration of
listen timer, it moves back to
sleep state. Otherwise, its state changes to
active state and communication with another sensor node is performed. In
active state, if there is no further data to be transmitted or received until the expiration of
active timer, after completing transmitting or receiving any data, it moves to
sleep state again.
In duty cycling, since different states of sensor nodes have different levels of power consumption, it is essential to obtain the steady state probability of sensor node states in order to analyze the energy consumption [
3]. Also, since state transitions are controlled by timer values, the effect of timer values and traffic characteristics on the steady state probability should be analyzed in detail, so that sensor network operators can select appropriate timer values of sensor nodes for efficient energy conservation. To the best of our knowledge, however, energy consumption in most previous works is analyzed via simulation, without deriving the steady state probability analytically. Furthermore, the effect of timer values on energy consumption has not been investigated analytically in detail. In this sense, our work is the first attempt to derive the steady state probability of sensor node states based on traffic characteristics and timer values and investigate the effect of traffic characteristics and timer values on energy consumption analytically. We note that since the analytical methodology developed in this paper is based on a general energy conservation scheme based on duty cycling, it can be extended to other energy conservation schemes based on duty cycling with different sensor node states, without much difficulty.
The remainder of this paper is organized as follows: Section 2 surveys related works on duty cycling. Section 3 develops analytical model for deriving steady state probability of sensor node states and obtains energy consumption. Numerical examples are presented in Section 4. Finally, Section 5 summarizes this work and presents further works.
2. Related Works
In this section, related works on energy conservation schemes based on duty cycling are surveyed. As mentioned in Introduction, duty cycling can be classified as topology control and power management. In addition, topology control is further divided into location driven protocol and connectivity driven protocol based on the criteria used to decide activation and deactivation of sensor nodes [
4]. In location driven protocol, the location of sensor nodes is used as the criteria and geographical adaptive fidelity (GAF) [
11] is a representative example of this protocol. In connectivity driven protocol, on the other hand, network connectivity is used as the criteria and Span [
12] is one example of this protocol.
In GAF [
11], sensor network is divided into grids, where any two sensor nodes located within adjacent grids can communicate with each other. In each grid, only one sensor node is active and other sensor nodes in the grid are in
sleep state. There are three states in GAF,
i.e.,
sleep,
discovery, and
active states. In
sleep state, radio interface of a sensor node is put into
sleep state and the sensor node moves into
discovery state at the expiration of
sleep timer. In
discovery state, the sensor node exchanges discovery messages with other sensor nodes within the same grid. If the sensor node receives a discovery message from a sensor node with higher rank,
i.e., higher residual energy, within
discovery timer, it moves back to
sleep state. Otherwise, it moves to
active state. In
active state, if the sensor node receives a discovery message from a sensor node with higher rank within
active timer, it enters into
sleep state. Otherwise, it moves back to
discovery state at the expiration of
active timer.
Span [
12] is a distributed backbone selection protocol and adaptively elects coordinators in sensor network. The coordinators perform multi-hop routing for other sleeping sensor nodes by staying awake. Sensor nodes in
sleep state periodically wake up and check whether to sleep or stay awake as a coordinator using coordinator eligibility rule which is based on the battery level and the number of neighbor sensor nodes. In coordinator eligibility rule, if two neighbor sensor nodes of a non-coordinator sensor node cannot reach each other, either directly or via one or two coordinators, the non-coordinator sensor node becomes a coordinator sensor node. In order to avoid the situation that multiple sensor nodes become a coordinator at the same time, a random back off delay is used before taking a coordinator role. Each coordinator periodically checks if it can withdraw a coordinator role by checking if every pair of sensor nodes of its neighbor sensor nodes can communicate, either directly or via one or two coordinators.
In power management, activated sensor nodes alternate between
sleep,
listen, and
active states, based on traffic characteristics, without depending on topology or connectivity information. The power management scheme is further divided into sleep/wakeup protocol which is independent on medium access control (MAC) protocol and MAC protocol with low duty cycle, where sleep/wakeup is tightly coupled with MAC protocol [
4]. In this paper, we only focus on sleep/wakeup protocol because it can be used with any MAC protocol. Basic energy conservation algorithm (BECA)[
13] and sparse topology and energy management (STEM) [
14] belong to this protocol.
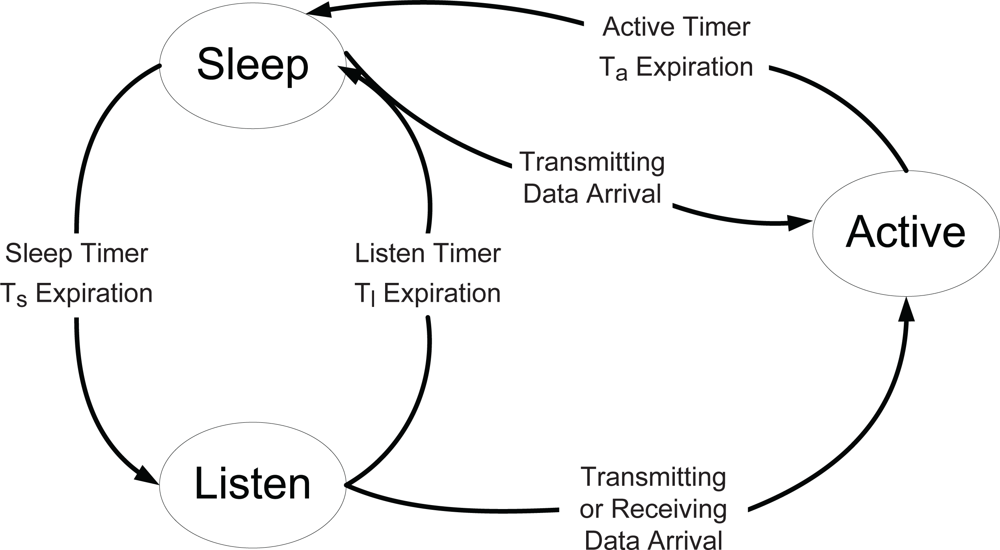
In BECA [
13], sensor nodes stay in
sleep state initially when communication is not required, by putting the communication interface in the low power
sleep state. Each sensor node periodically wakes up for every
sleep timer,
Ts, by moving into
listen state and listens any incoming data to the sensor node during
listen timer,
Tl. In
listen state, if there is no incoming data until the expiration of the
listen timer, it moves back to
sleep state again. Otherwise, its state changes to
active state and it communicates with another sensor node. In
active state, if there is no further data to be transmitted or received until the expiration of
active timer,
Ta, after completing transmitting or receiving any data, it moves to
sleep state again.
Figure 1 shows state transition model of BECA.
In STEM [
14], all sensor nodes wake up simultaneously for every
Twakeup and remain in
active state for active time. Then, they move to
sleep state at the same time until the next wakeup time. In STEM, low duty cycle,
i.e., high energy efficiency, is possible by adjusting active time much smaller than wakeup time. The STEM has the problem of high probability of collisions due to simultaneous wakeup and thus, staggered wakeup pattern (SWP) [
15] has been proposed to solve this problem by waking up sensor nodes at different times based on the different levels of routing tree.
5. Conclusions and Further Works
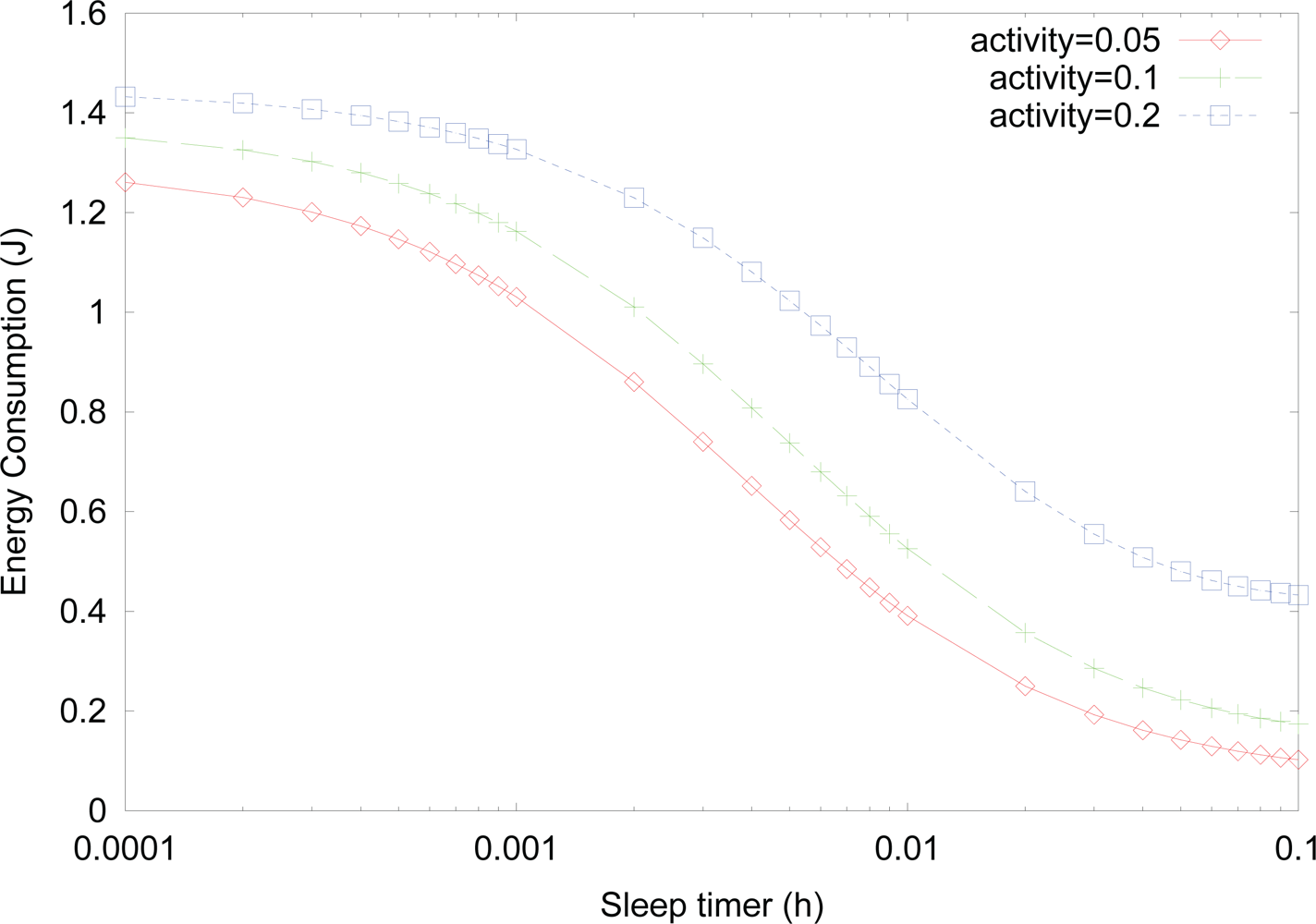
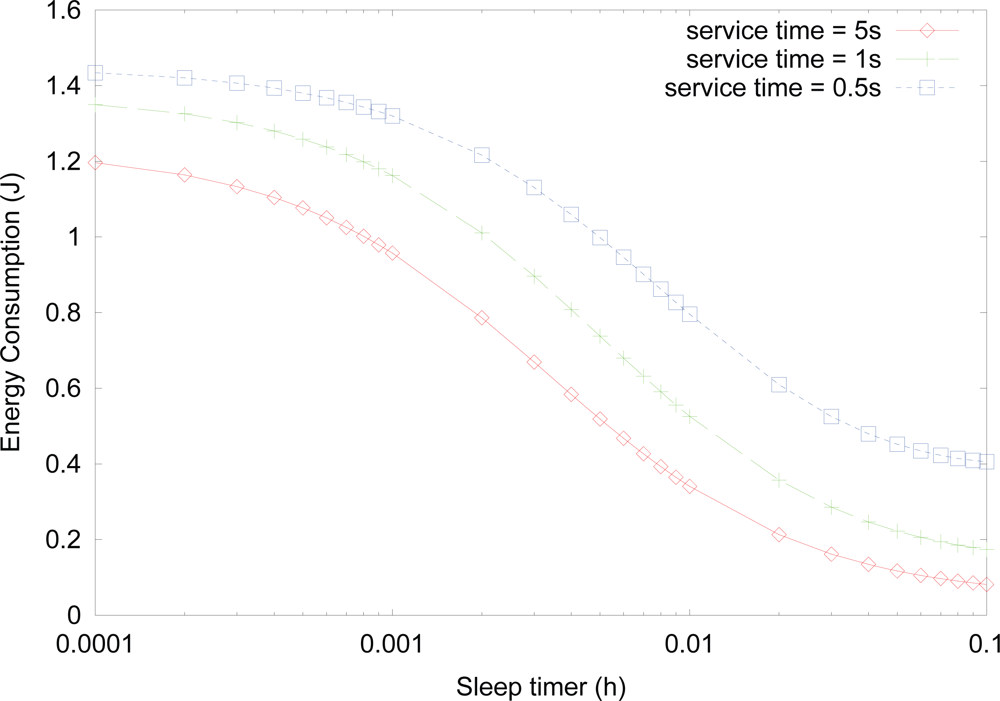
In this paper, we developed an analytical methodology of state transition model of an energy conservation scheme based on duty cycling and derive both steady state probability of sensor node states and energy consumption analytically based on traffic characteristic and timer values. Then, the effects of sleep timer, listen timer, active timer, and traffic characteristics on the steady state probability and energy consumption have been analyzed.
From the numerical examples, it can be concluded that the steady state probability and thus, resulting energy consumption are very sensitive to the change of timer values and traffic characteristic, and thus, an appropriate selection of timer values taking into account of traffic characteristics is very important for efficient power conservation. The result of this paper can provide sensor network operators guideline for selecting appropriate timer values for efficient energy conservation, depending on traffic characteristic. We note that since the analytical methodology developed in this paper is based on a general energy conservation scheme based on duty cycling, it can be extended to other energy conservation schemes based on duty cycling with different sensor node states, without difficulty.
As further works, the effect of timer values and traffic characteristics on the other performance measures, such as the delay of data delivery and the number of retransmissions for successful routing will be analyzed for more thorough analysis of an energy conservation scheme based on duty cycling, using the analytical model developed in this paper. The extension of the proposed analytical model for system optimization or design of a new duty cycling scheme, such as traffic-aware duty cycling scheme based on dynamic adjustments of optimal timer values for varying traffic environments, will be studied in further works too.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}