1. Introduction
The problem of estimating the direction-of-arrival (DOA) of multiple narrow-band sources has received considerable attention in many fields, e.g., radar, sonar, radio astronomy and mobile communications [
1]. Many high-resolution DOA estimation algorithms have been proposed in the last few decades. Their excellent performance relies crucially on perfect knowledge of the array manifold. In practice, however, the array manifold usually suffers from imperfections, such as unknown mutual coupling between antenna elements, imperfectly-known sensor positions and orientations and gain-phase imbalances. Without array manifold calibration, the performance of DOA estimation may degrade substantially. Hence, it is necessary to calibrate imperfections prior to carrying out DOA estimation.
A large number of calibration methods has been proposed to deal with the imperfect manifold caused by unknown or misspecified mutual coupling [
2,
3,
4,
5,
6,
7,
8,
9,
10,
11]. For example, some iterative mutual coupling auto-calibration methods for uniform linear arrays (ULAs) and uniform circular arrays (UCAs) were proposed in [
2,
3]. However, the high computational complexity required by iterations may be time consuming, and the convergence is not theoretical guaranteed, thus resulting in algorithmic instability. Recently, by taking advantage of the special structure of the mutual coupling matrix for ULAs, Ye and coauthors [
4,
5] demonstrated that DOAs can be accurately estimated without compensating for mutual coupling if a group of auxiliary sensors are added into ULAs. Dai and coauthors further extended the result to the spatial smoothing method [
6], real-valued method [
7] and
-norm regularized method [
12]. These methods are referred to as the auxiliary methods. Neither a calibration source nor iteration is required in the auxiliary methods. However, because of only applying a middle subarray, they reduce the working array aperture, which limits the applicability of these methods to cases with either few DOAs or many array elements. Some alternatives that can calibrate the imperfect manifold with the whole array in the presence of mutual coupling are proposed in [
8,
9,
10,
11].
Recently, the emerging technique of compressive sensing (CS) has given renewed interest to the problem of DOA estimation [
12,
13,
14,
15,
16,
17,
18]. These methods exhibit many advantages, e.g., improved robustness to noise, limited number of snapshots and correlation of signals. Sparse Bayesian learning (SBL) is a popular and important technique for the sparse signal recovery in CS [
19,
20,
21], which formulates the signal recovery problem from a Bayesian perspective, while the sparsity information is exploited by assuming a sparse prior for the signal of interest. It is worth noting that
-norm regularized optimization is deemed to be a special example of SBL, if a maximum
a posteriori (MAP) optimal estimate is adopted with a Laplace signal prior. Theoretical and empirical results show that SBL methods can achieve enhanced performance over
-norm regularized optimization [
20,
21]. It is generally assumed that the measurement matrix in SBL is precisely known. Unfortunately, this assumption is invalid if perturbations on the measurement matrix (e.g., when the array manifold suffers from the aforementioned imperfections) are considered. Additive perturbations [
22,
23] and multiplicative perturbations [
16] have been addressed in the recent literature.
In this paper, we will propose a modified Bayesian method for joint estimation of DOAs and the mutual coupling coefficients with ULAs, where the optimization problem is formulated in a SBL framework with a two-stage hierarchical prior, and then, we adopt an expectation-maximization (EM) algorithm that treats the signals of interest and the mutual coupling coefficients as hidden variables and parameters, respectively. To the best of our knowledge, there are very limited SBL methods that can resolve the DOAs with mutual coupling. This problem was first addressed in [
24], where a unified SBL framework was proposed to address the DOA estimation problem with typical perturbations of mutual coupling, gain-phase uncertainty and sensor location error. The main differences between our method and the method in [
24] are:
Our SBL model constitutes a two-stage hierarchical form, which results in the Student
t prior in a hierarchical manner; while the model in [
24] has only stationary priors. The advantage of the Student
t prior is that it enforces the sparsity constraint more heavily [
21,
25].
Our method provides a distinct Bayesian inference for the EM algorithm, which can update the mutual coupling coefficients more efficiently.
Our method uses an additional singular value decomposition (SVD) to reduce the computational complexity of the signal reconstruction process and the sensitivity to the measurement noise.
These differences guarantee that our method can give a better joint estimation performance of DOAs and the mutual coupling coefficients.
3. The Proposed Sparse Bayesian Learning Method
The associated learning problem becomes the search for the hyperparameters
β and
δ, as well as the parameter
. As
cannot be explicitly calculated, a Type-II ML [
19] (or evidence maximization) procedure is exploited to perform the Bayesian inference. In other words, the hyperparameters (
β and
δ) and parameter (
) are estimated by maximizing
or its logarithm
. However, explicitly finding the values of
β,
δ and
that maximize
is intractable, and here, we adopt an EM algorithm that treats
as a hidden variable. The principle behind the EM algorithm is to instead repeatedly construct a lower bound on
(E-step) and then to optimize that lower-bound (M-step). Specifically,
E-step: Compute:
and evaluate:
where
denotes the estimated value in the
t-th iteration.
M-step: Find the hyperparameter updates and the parameter updates:
In the rest of this section, we will discuss the two steps in detail.
3.1. E-Step
Using the Bayes rule, we can verify that the posterior distribution of
in Equation (
11) is also a complex Gaussian [
19]:
where:
On the other hand, by combining the stages of the hierarchical Bayesian model,
can be rewritten as:
Therefore, Equation (
12) leads to:
3.2. M-Step
In this subsection, we will address the derivation of hyperparameter updates (
and
), as well as the parameter update (
).
For
β, ignoring terms in the logarithm independent thereof, we just have to maximize:
which, through differentiation, gives the update for
:
For
δ, also ignoring terms in the logarithm independent thereof, we have:
Setting the derivative of Equation (
21), with respect to
δ, to zero and solving for each
gives the updates:
where
.
For
, its estimate should maximize the following expected value:
In order to calculate the derivative of Equation (
23), we need the following lemma.
Lemma 1 (see [
2]).
Let and be defined as earlier, then for any vector ,
we have:where the matrix is the sum of the two matrices: With the assistance of Lemma 1, we are capable of rewriting the terms
and
in Equation (
23) as:
and:
respectively, where
stands for a decomposition of
and
denotes the
i-th column of
. Using Equations (
27) and (
28), we can calculate the derivative of
, with respect to
, as:
Setting the derivative to zero gives:
Remark 1. Note that [9,10,11] provided an alternative parameterization for the steering vector:where ,
is a block diagonal matrix with ,
and and with and .
However, it is unlikely that Equation (31) can be applied to the M-step for .
The most difficult aspect for applying the alternative parameterization in Equation (31) is that it is dependent on the geometric progression in ;
while the terms and in Equations (27) and (28) do not have the property of geometric progression. The EM algorithm proceeds by repeated application of Equations (
20), (
22) and (
30), until a prescribed accuracy is achieved. Once the algorithm is convergent, we are able to obtain the calibrated
. As far as the estimated
’s are concerned, we observed that many of
tend to infinity in the EM process. Clearly, the rows corresponding to these infinity
’s are zero; while the rows corresponding to small
’s imply the true DOAs.
4. Simulation Results
In this section, we will present several simulation results to illustrate the performance of our proposed method. We will compare the proposed method to the original SBL method in [
24], the iterative method in [
3] and the auxiliary methods in [
5,
12].
Simulation 1 addresses the performance comparisons of the joint estimation of DOAs and mutual coupling coefficients. Consider a scenario where a ULA composed of
sensors is used to receive
uncorrelated signals coming from
= –19.7 °C and
= 10.1 °C. Note that the effect of mutual coupling is negligible between two sensors that are far enough away from each other, because the mutual coupling coefficient is inversely proportional to their distance. Hence, it is reasonable to approximate the mutual coupling effect with just a few nonzero coefficients. In the simulation, we assume that the number of mutual coupling coefficients is
with
and
.
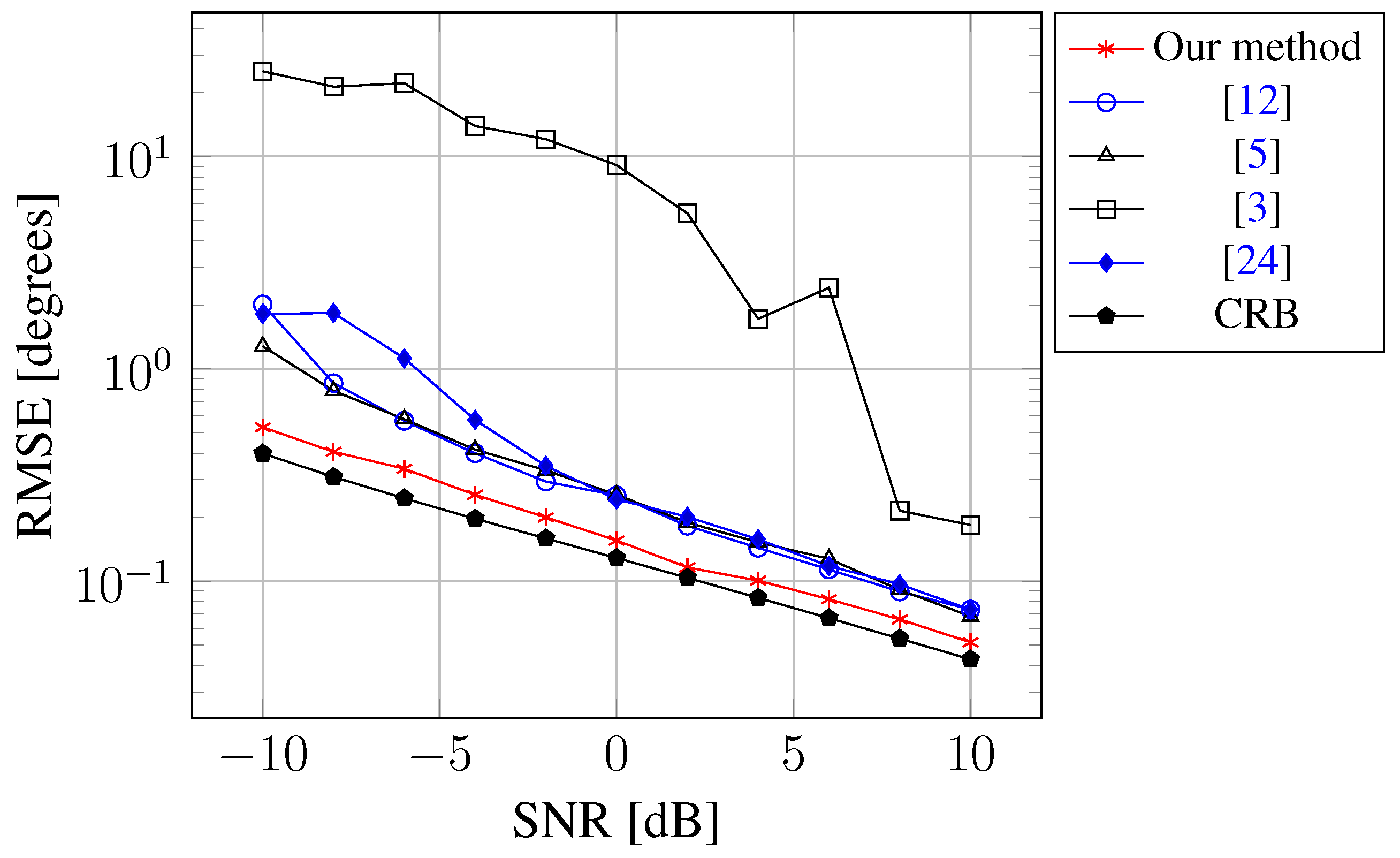
Figure 1 shows the root mean square error (RMSE) of DOA estimation
versus input SNR computed via 200 Monte Carlo runs, where the number of snapshots is 100. For the ease of comparison, we also include the curve for CRB. As can be seen from the figure, our method outperforms the state-of-the-art methods. This is because: (1) compared to the method in [
24], our method utilizes a hierarchical form of the Student
t prior to enforce the sparsity of unknown signal more heavily; moreover, our method uses the SVD to reduce the sensitivity to the noise; (2) compared to the methods in [
5,
12], our method uses the whole array, rather than a subarray, to estimate DOAs and to compensate for the mutual coupling effect.
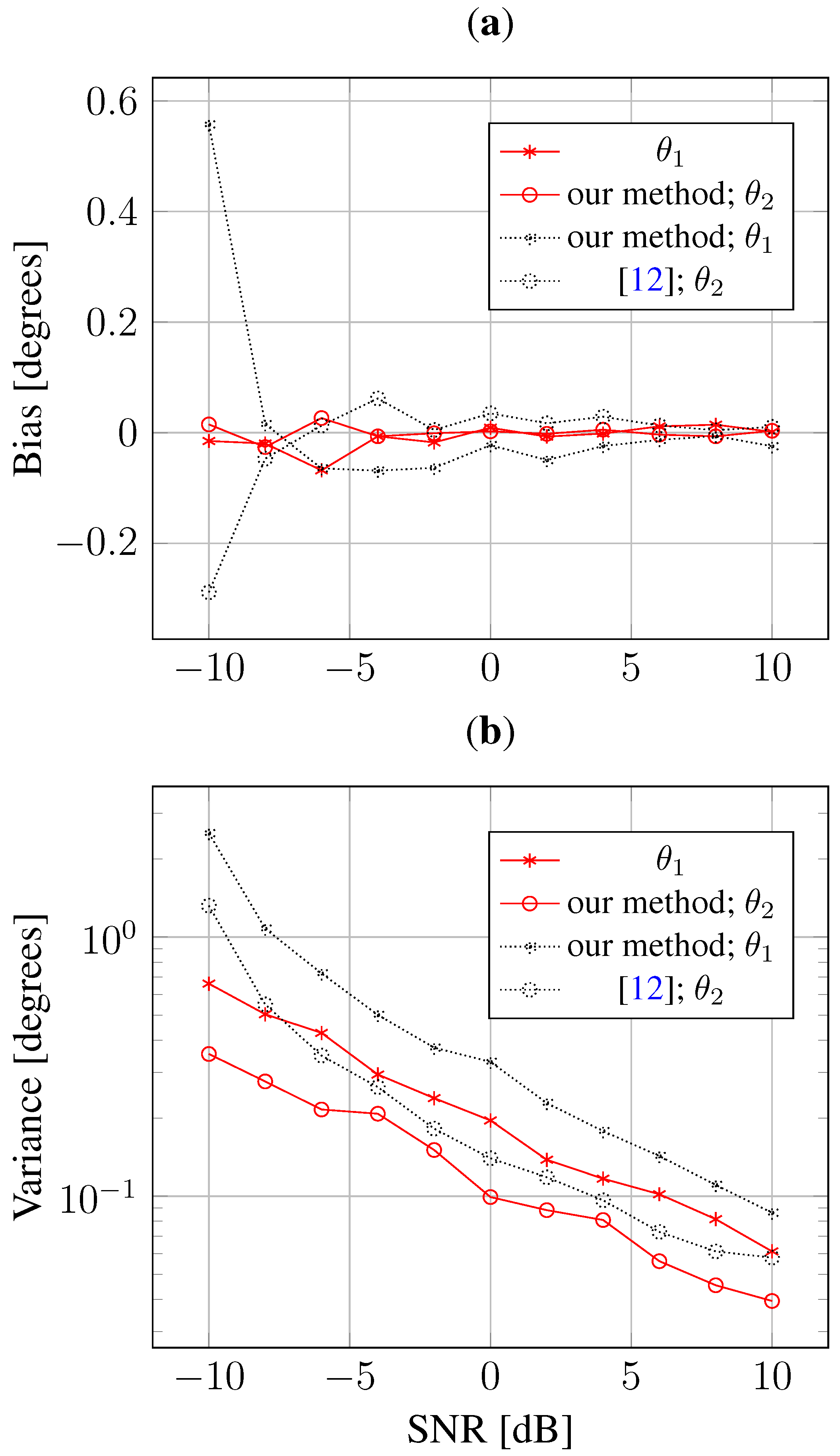
Figure 2 shows the estimation bias and variance for each DOA. Compared to the
-norm regularized method [
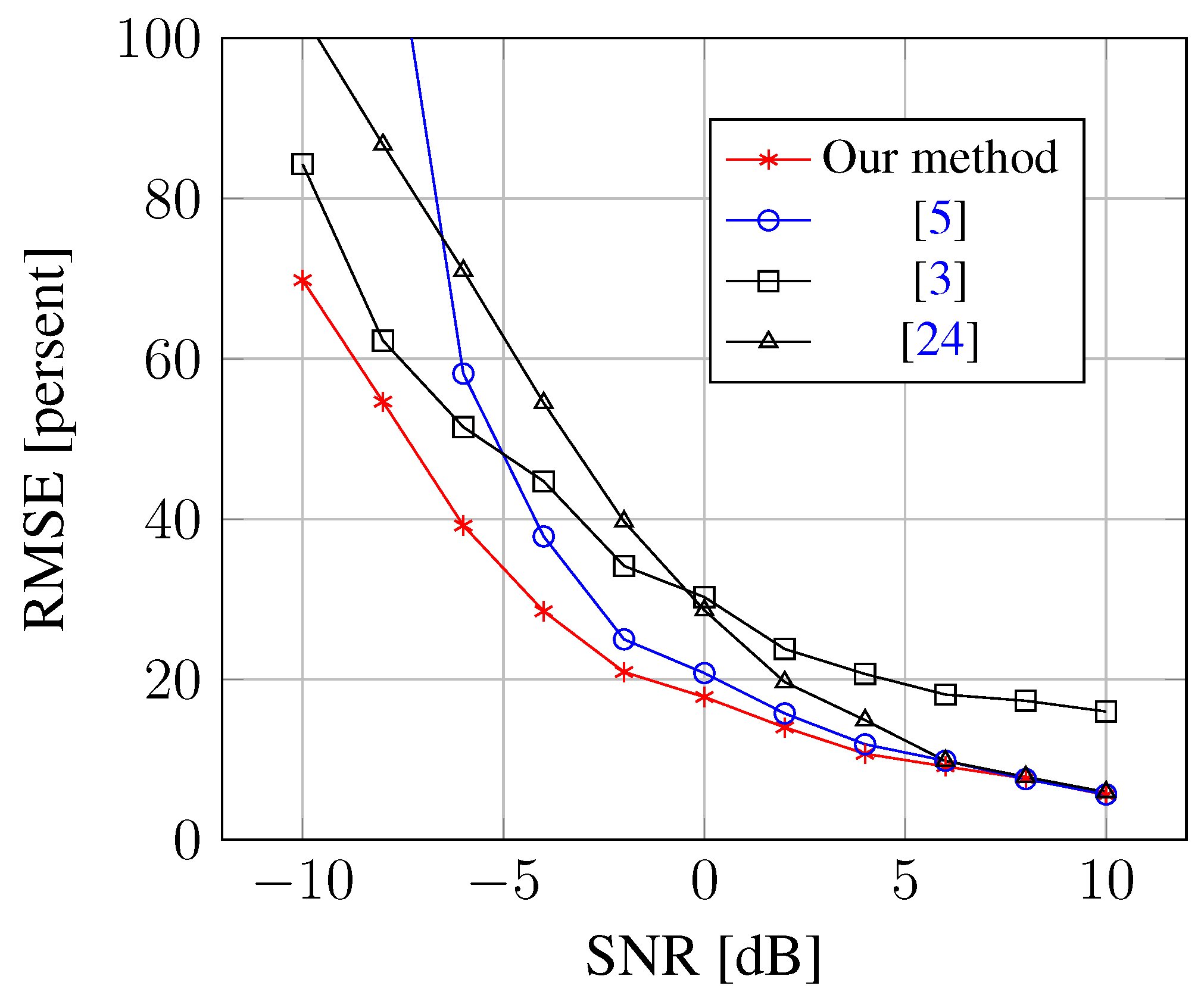
12], our method can significantly reduce the DOA estimation bias, as well as the variance. To assess the performance of mutual coupling calibration,
Figure 3 shows the relative RMSE of the estimation of the mutual coupling coefficients. This relative RMSE is defined as:
where
is the estimate of
at the
n-th Monte Carlo run. As shown from the
Figure 3, the mutual coupling coefficients can be estimated more accurately in our method, especially for low SNR signals. Hence, if all of the methods embed the mutual coupling coefficients within the same classical eigendecomposition algorithm, such as MUSIC and ESPRIT, to estimate the DOA, our method can achieve the best performance.
Figure 1.
RMSE of the DOA estimate against SNR.
Figure 1.
RMSE of the DOA estimate against SNR.
Figure 2.
Estimation bias and variance against SNR. (a) Bias; (b) Variance.
Figure 2.
Estimation bias and variance against SNR. (a) Bias; (b) Variance.
Figure 3.
RMSE of mutual coupling coefficients against SNR.
Figure 3.
RMSE of mutual coupling coefficients against SNR.
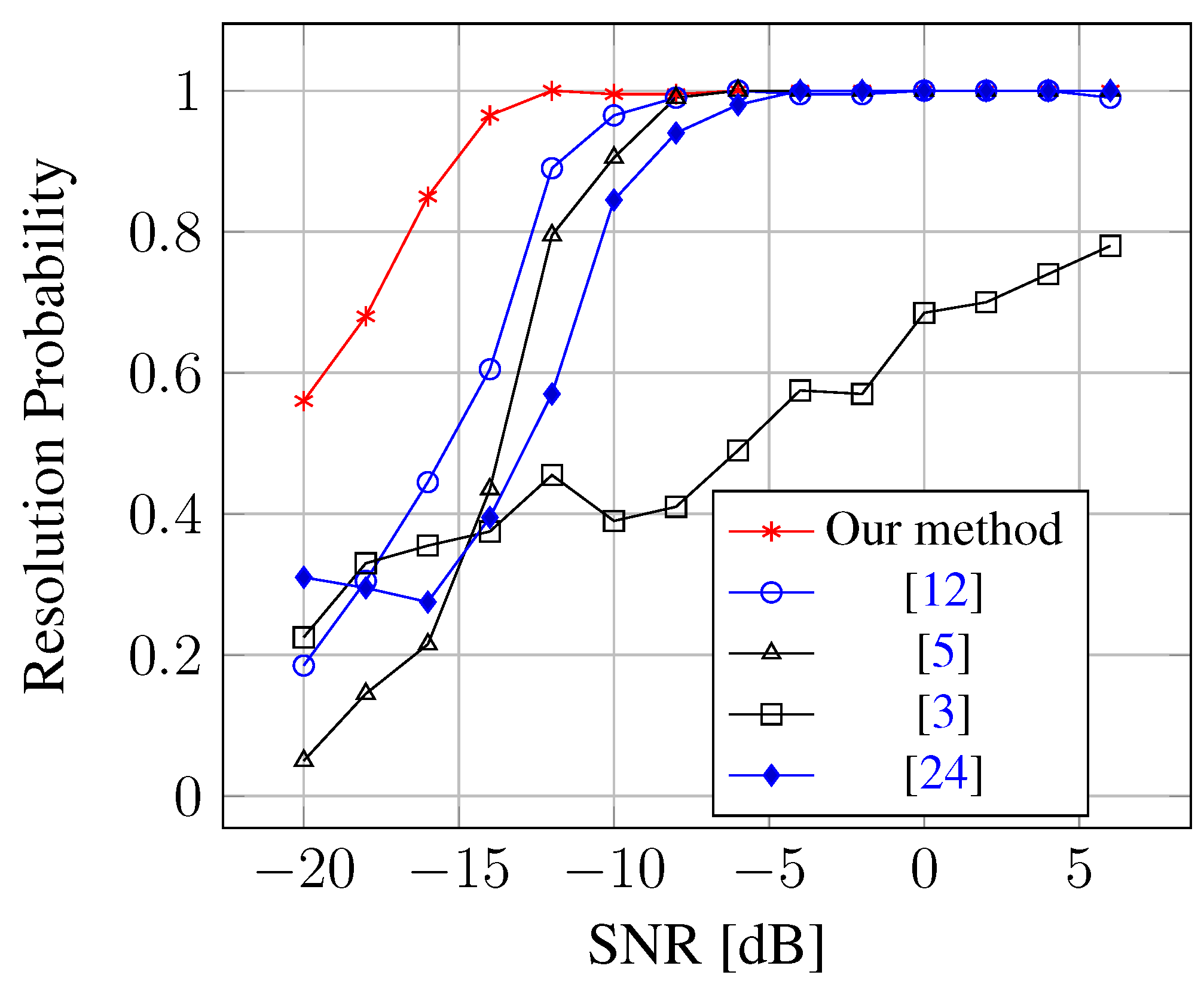
Simulation 2 is used to investigate the capability of resolving closely-spaced sources with limited snapshots (
) for several methods. The simulation considers a scenario where a ULA composed of
sensors is used to receive
uncorrelated signals coming from
= –2.5 °C and
= 3.5 °C, and the number of mutual coupling coefficients is
with
and
. We say that the two signals are exactly resolved in a given run, if
is smaller than
, where
stands for the estimated DOA for the
k-th signal. As can be seen from
Figure 4, the resolution performance of our method outperforms others. The superior resolution performance of sparse representation is natural, which is consistent with the simulation results in [
12].
Figure 4.
Resolution probability against SNR for closely-spaced sources.
Figure 4.
Resolution probability against SNR for closely-spaced sources.
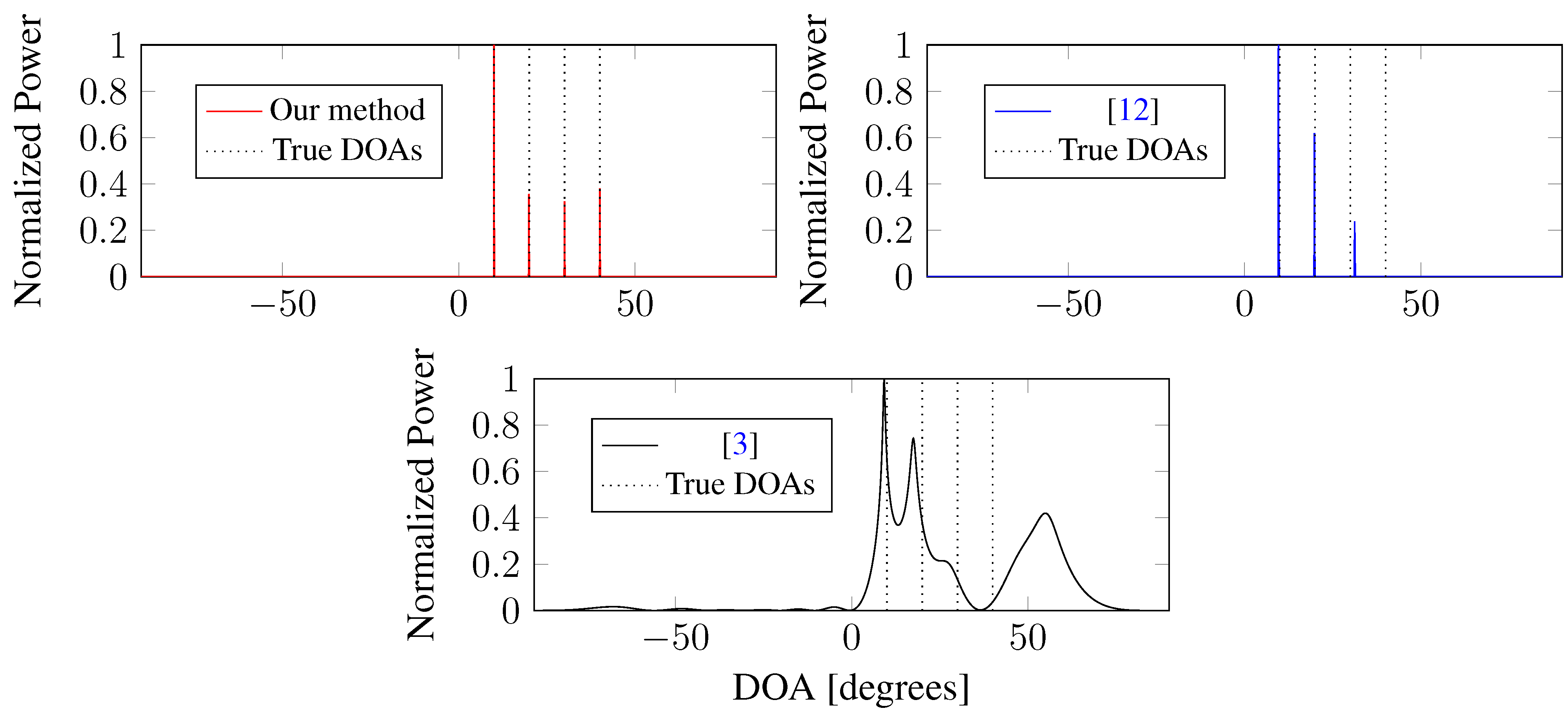
Simulation 3 addresses the “blind angle” phenomenon, which may result in the substantially degraded performance of DOA estimation [
4,
5]. We consider a scenario where a ULA composed of
sensors is used to receive
uncorrelated signals coming from
= 10 °C,
= 20 °C,
= 30 °C and
= 40 °C, and the number of mutual coupling coefficients is
with
and
. It is easy to verify that the blind angle occurs at
= 40 °C. The number of snapshots is 30, and the SNR is 10 dB.
Figure 5 illustrates that: (1) our method can estimate all of the true DOAs accurately, including the blind DOA
= 40 °C; (2) the
-norm regularized method [
12] fails in estimating the blind DOA from
= 40 °C, but succeeds in obtaining the DOAs from other directions; (3) the iterative method [
3] misses two DOAs
= 30 °C and
= 40 °C. Obviously, our method has the best performance of “blind angle” suppression.
Figure 5.
DOA estimation in the case of a “blind angle”.
Figure 5.
DOA estimation in the case of a “blind angle”.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




