
A Monolithic CMOS Magnetic Hall Sensor with High Sensitivity and Linearity Characteristics

Abstract
:1. Introduction
2. High Sensitive Hall Plate
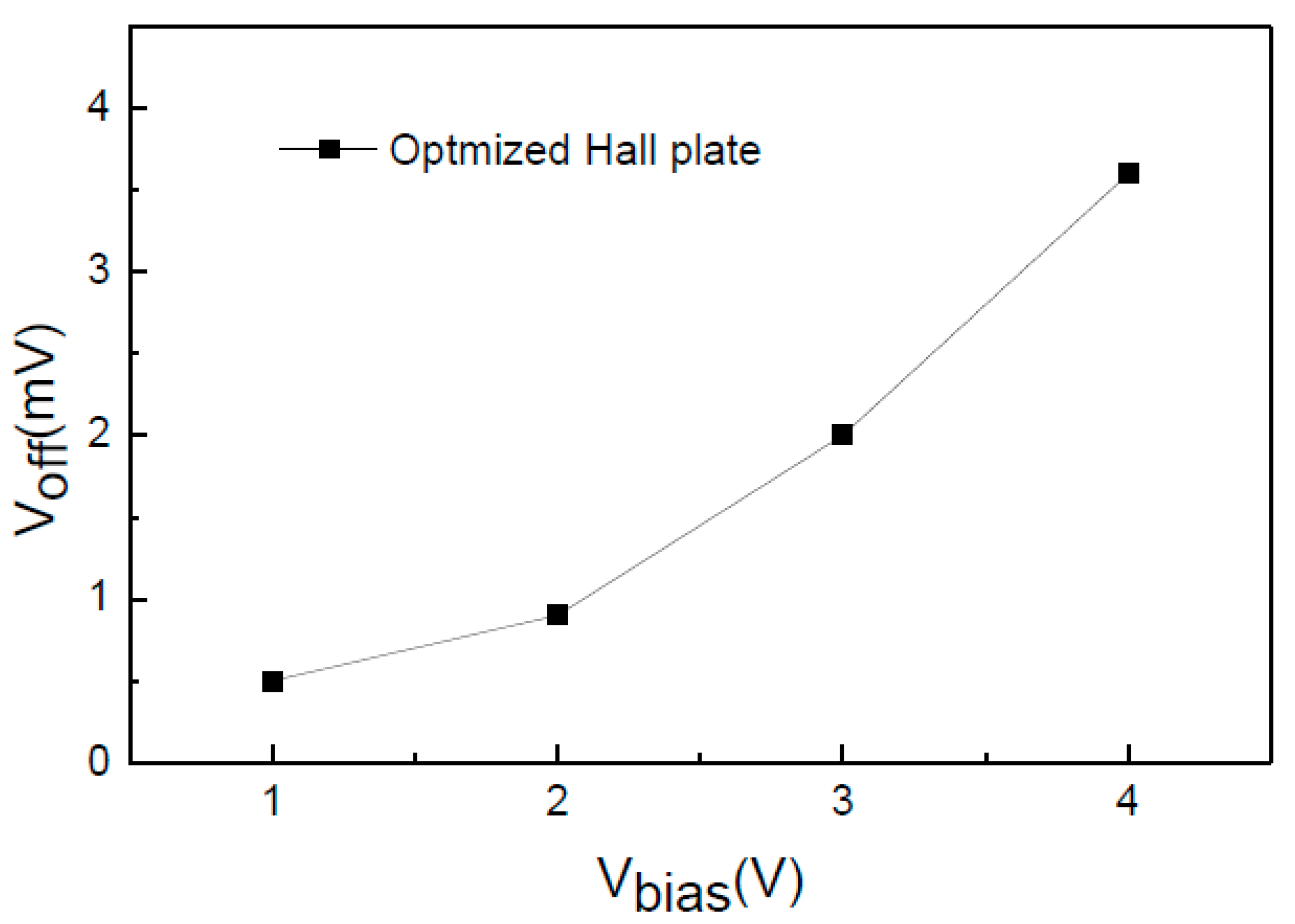
2.1. Offset Reduction

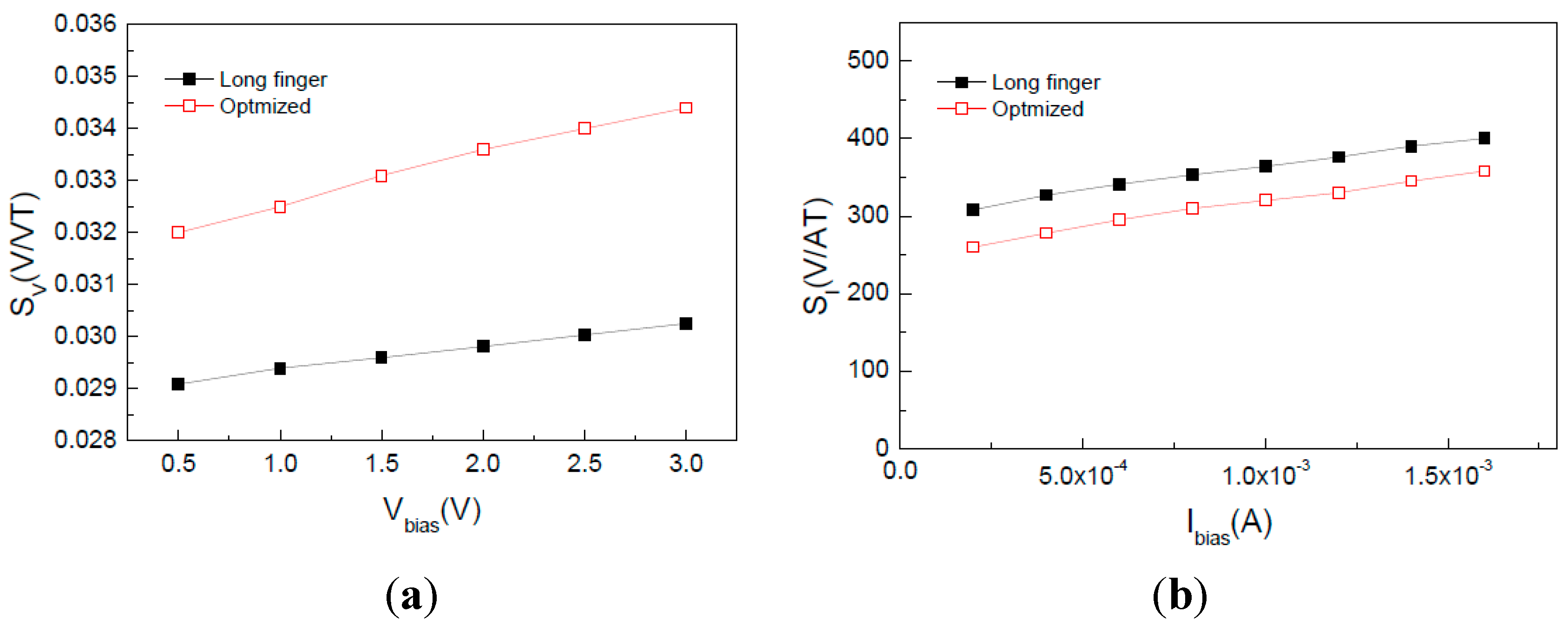
2.2. Sensitivity Improvement
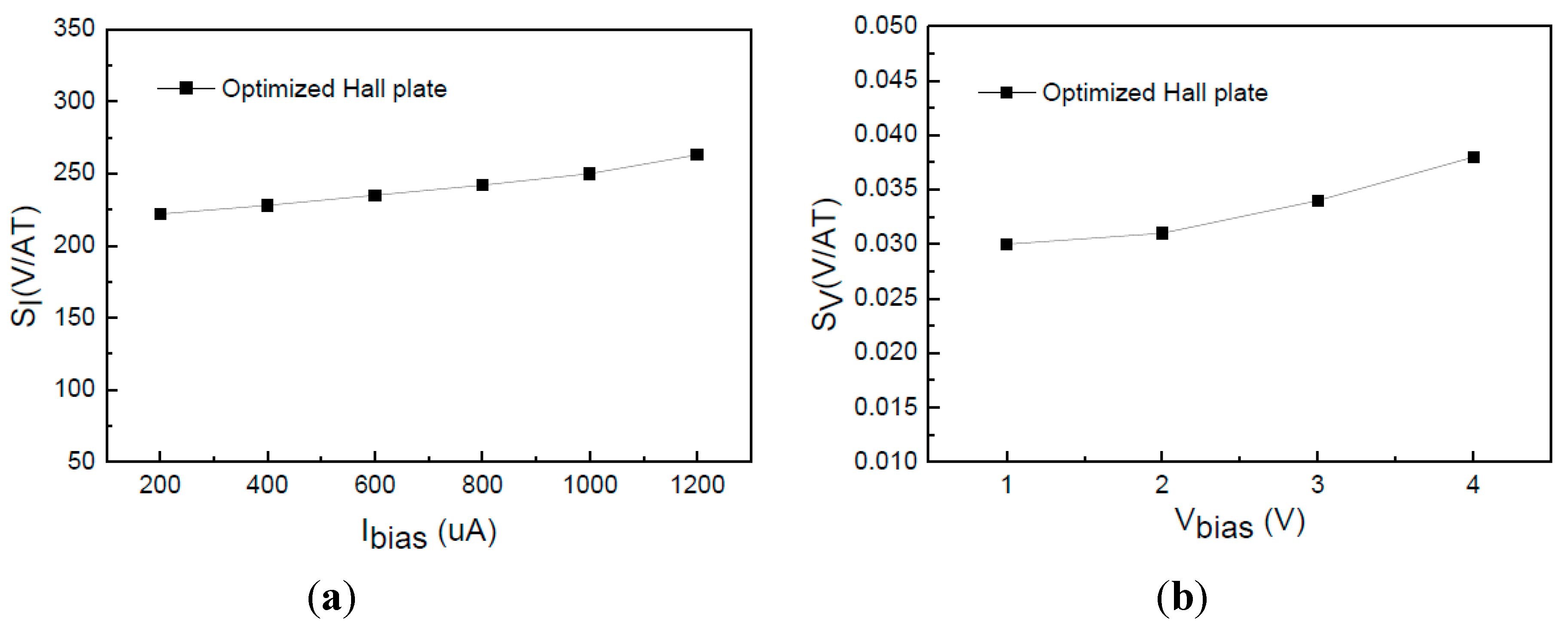
2.3. Three-Dimension (3D) Device Simulation


3. System Design and Simulation

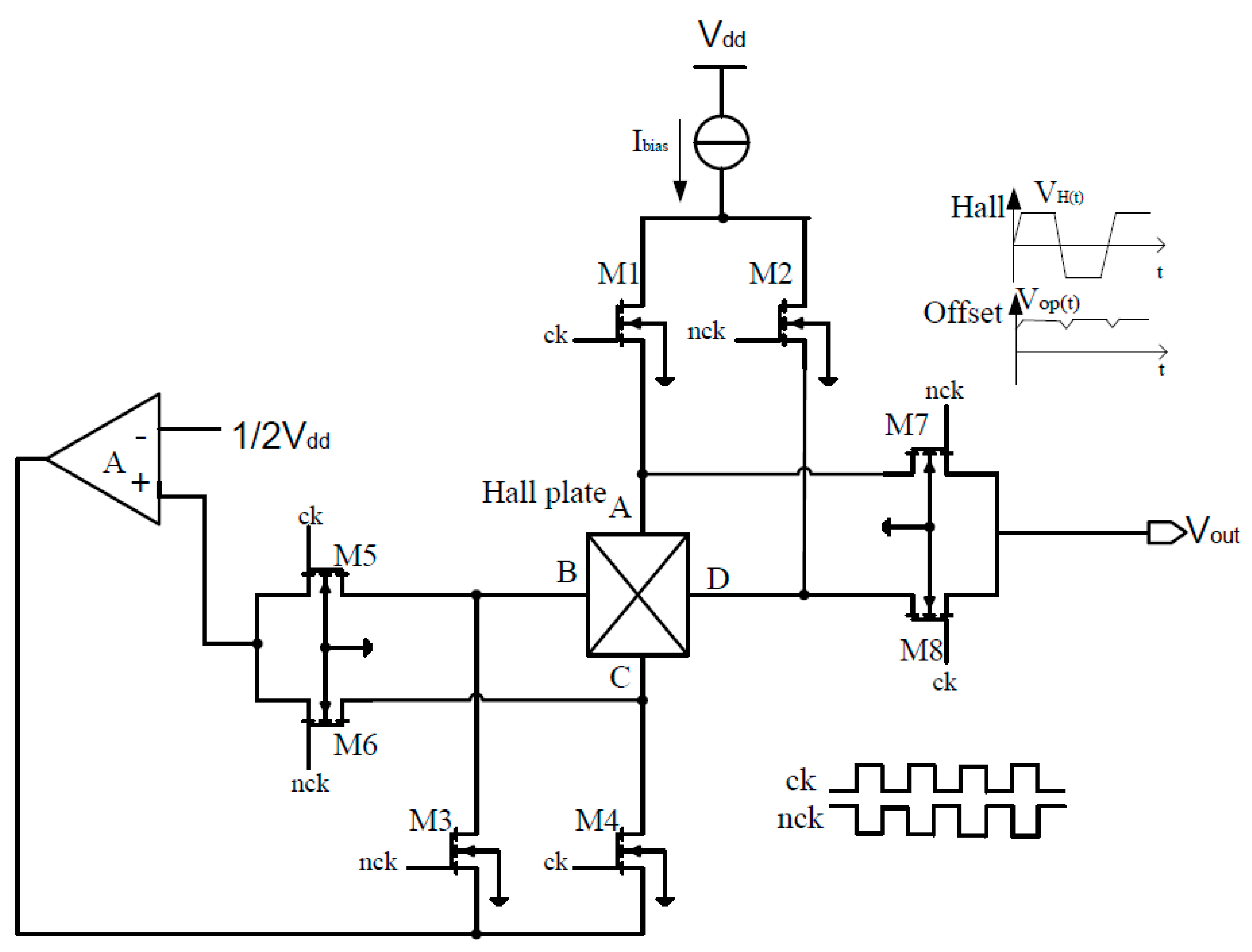
3.1. Switched Hall Plate

3.2. Signal Conditioner


3.3. Circuit Simulation


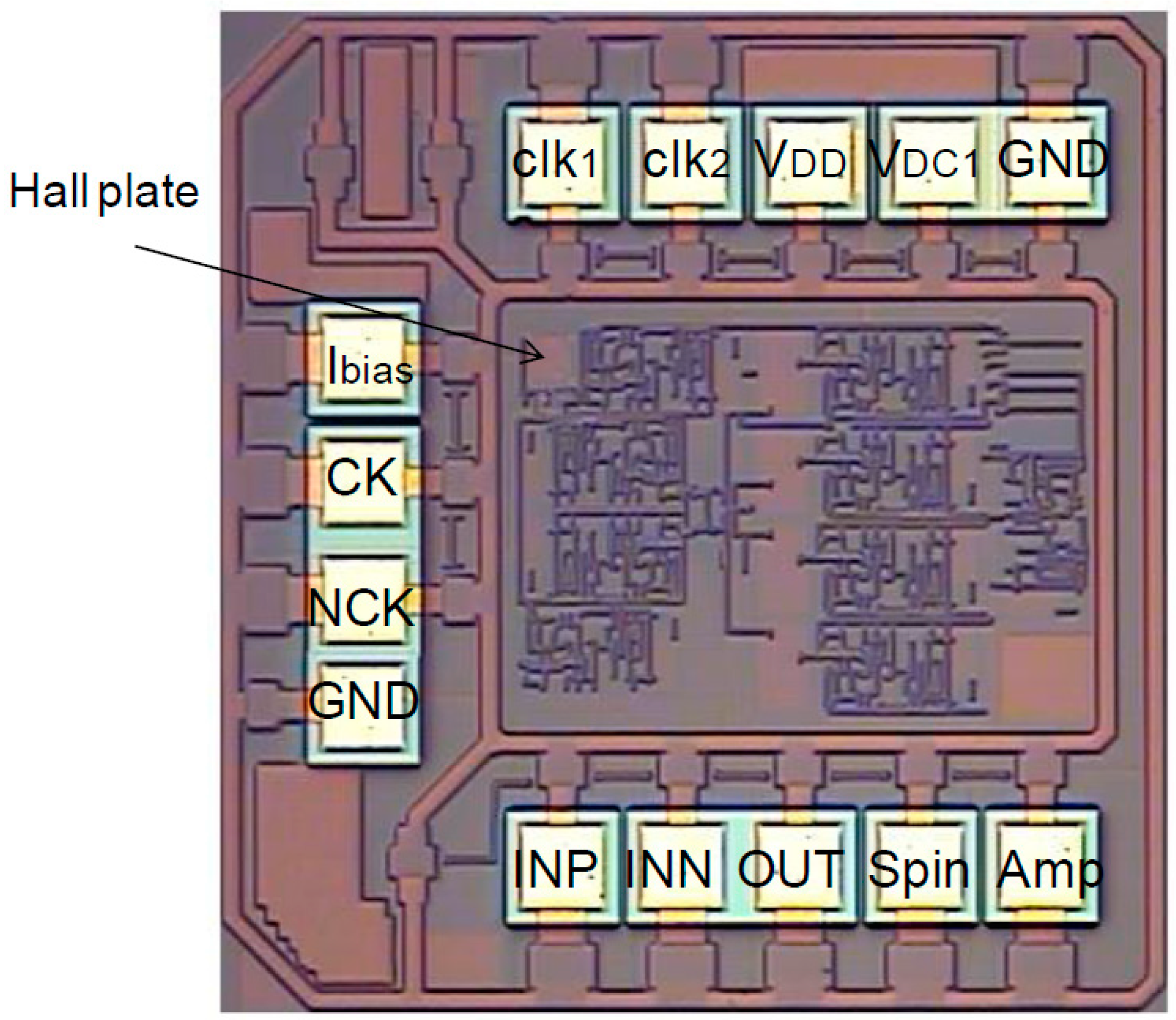
4. Monolithic Hall Sensor Implementation






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Reference[10] | Reference[2] | This Work |
|---|---|---|---|
| Technology | 2 μm BiCMOS | 0.8 μm CMOS | 0.8 μm HV CMOS |
| Supply voltage | 5 V | 5 V | 5 V |
| Static power consumption | 35 mW | N/A | 20 mW |
| Quiescent working point | 2.5 V | N/A | 2.5 V |
| Measurement range | ±100 mT | ±50 mT | ±175 mT |
| Equivalent residual offset | 0.5 mT | N/A | 0.48 mT |
| linearity | 99.9% | >99% | >99% |
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Roumenin, C.S.; Lozanova, S.V. Linear displacement sensor using a new CMOS double-Hall device. Sens. Actuators A Phys. 2007, 138, 37–43. [Google Scholar] [CrossRef]
- Pastre, M.; Kayal, M.; Blanchard, H. A Hall sensor analog front end for current measurement with continuous gain calibration. IEEE Sens. J. 2007, 7, 860–867. [Google Scholar] [CrossRef]
- Motz, M.; Ausserlechner, U.; Scherr, W.; Katzmaier, E. An integrated Hall sensor platform design for position, angle and current sensing. In Proceedings of the IEEE Conference on Sensors, Daegu, Korea, 22–25 October 2006; pp. 1008–1011.
- Alaeinovin, P.; Jatskevich, J. Hall-sensor signals filtering for improved operation of brushless DC motor. In Proceedings of the IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 27–30.
- Randjelovic, Z.B.; Kayal, M.; Popovic, R.; Blanchard, H. Highly sensitive Hall magnetic sensor microsystem in CMOS technology. IEEE J. Solid State Circuits 2002, 37, 151–159. [Google Scholar] [CrossRef]
- Xu, Y.; Pan, H.B.; He, S.Z.; Li, L. Monolithic H-bridge brushless DC vibration motor driver with a highly sensitive Hall sensor in 0.18 μm complementary metal-oxide semiconductor technology. IET Circuits Devices Syst. 2013, 7, 204–210. [Google Scholar]
- Steiner, R.; Mayer, Ch.; Häberli, A. Offset reduction in Hall devices by continuous spinning current method. Sens. Actuators A Phys. 1998, 66, 167–172. [Google Scholar] [CrossRef]
- Xu, Y.; Pan, H.B.; He, S.Z.; Li, L. A highly sensitive CMOS digital Hall sensor for low magnetic field applications. Sensors 2012, 12, 2162–2174. [Google Scholar] [CrossRef] [PubMed]
- Chang, T.; Kai-Cheung, J. CMOS SC-spinning, current-feedback Hall sensor for high speed and low cost applications. In Proceedings of the IEEE conference on Sensors, Valencia, Spain, 3–5 November 2014; pp. 527–530.
- Bilotti, A.; Monreal, G.; Vig, R. Monolithic magnetic Hall sensor using dynamic quadrature offset cancellation. IEEE J. Solid State Circuits 1997, 32, 829–836. [Google Scholar] [CrossRef]
- Schurig, E.; Demierre, M.; Schott, C.; Popovic, R.S. A vertical Hall device in CMOS high-voltage technology. Sens. Actuators A Phys. 2003, 97, 47–53. [Google Scholar]
- Pascal, J.; Hébrard, L.; Kammerer, J.B.; Frick, V.; Blondé, J.P. First vertical Hall device in standard 0.35 μm CMOS technology. Sens. Actuators A Phys. 2008, 147, 41–46. [Google Scholar] [CrossRef]
- Kejik, P.; Schurig, E.; Bergsma, F.; Popovic, R.S. First fully CMOS-integrated 3D Hall probe. In Proceedings of the International Conference on Solid-State Sensors, Actuators and Microsystems, Seoul, Korea, 5–9 June 2005; pp. 317–320.
- Madec, M.; Osberger, L.; Hébrard, L. Assessment of the spinning-current efficiency in cancelling the 1/f noise of Vertical Hall Devices through accurate FEM modeling. In Proceedings of the IEEE Conference on Sensors, Baltimore, MD, USA, 3–6 November 2013; pp. 1–4.
- Hu, Y.; Yang, W.R. CMOS Hall sensor using dynamic quadrature offset cancellation. In Proceedings of the International Conference on Solid-State and Integrated Circuit Technology, Shanghai, China, 23–26 October 2006; pp. 284–286.
- Ouffoue, C.; Frick, V.; Kern, C.; Hébrard, L. New fully differential instrumental chain for Hall sensor signal conditioning integrated in standard 0.35 μm CMOS process. In Proceedings of the Joint IEEE North-East Workshop on Circuits and Systems and TAISA Conference, Toulouse, France, 28 June–1 July 2009; pp. 1–4.
- Osberger, L.; Frick, V.; Madec, M.; Hébrard, L. High resolution, low offset vertical Hall device in low-voltage CMOS technology. In Proceedings of the International New Circuits and Systems Conference (NEWCAS), Grenoble, France, 7–10 June 2015; pp. 1–4.
- Heidari, H.; Bonizzoni, E.; Gatti, U.; Maloberti, F. A CMOS current-mode magnetic Hall sensor with integrated front-end. IEEE Trans. Circuit Syst. I 2015, 62, 1270–1278. [Google Scholar] [CrossRef]
- Huang, H.Y.; Wang, D.J.; Li, W.B.; Xu, Y.; Qin, H.B.; Hu, Y.C. A simplified compact model of miniaturized cross-shaped CMOS integrated Hall devices. J. Semicond. 2012, 33. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Wang, D.; Xu, Y. A Monolithic CMOS Magnetic Hall Sensor with High Sensitivity and Linearity Characteristics. Sensors 2015, 15, 27359-27373. https://doi.org/10.3390/s151027359
Huang H, Wang D, Xu Y. A Monolithic CMOS Magnetic Hall Sensor with High Sensitivity and Linearity Characteristics. Sensors. 2015; 15(10):27359-27373. https://doi.org/10.3390/s151027359
Chicago/Turabian StyleHuang, Haiyun, Dejun Wang, and Yue Xu. 2015. "A Monolithic CMOS Magnetic Hall Sensor with High Sensitivity and Linearity Characteristics" Sensors 15, no. 10: 27359-27373. https://doi.org/10.3390/s151027359
APA StyleHuang, H., Wang, D., & Xu, Y. (2015). A Monolithic CMOS Magnetic Hall Sensor with High Sensitivity and Linearity Characteristics. Sensors, 15(10), 27359-27373. https://doi.org/10.3390/s151027359