
Time-Efficient High-Rate Data Flooding in One-Dimensional Acoustic Underwater Sensor Networks


Abstract
:
1. Introduction
2. Deployment and Proposed Transmission/Reception Timing Schemes
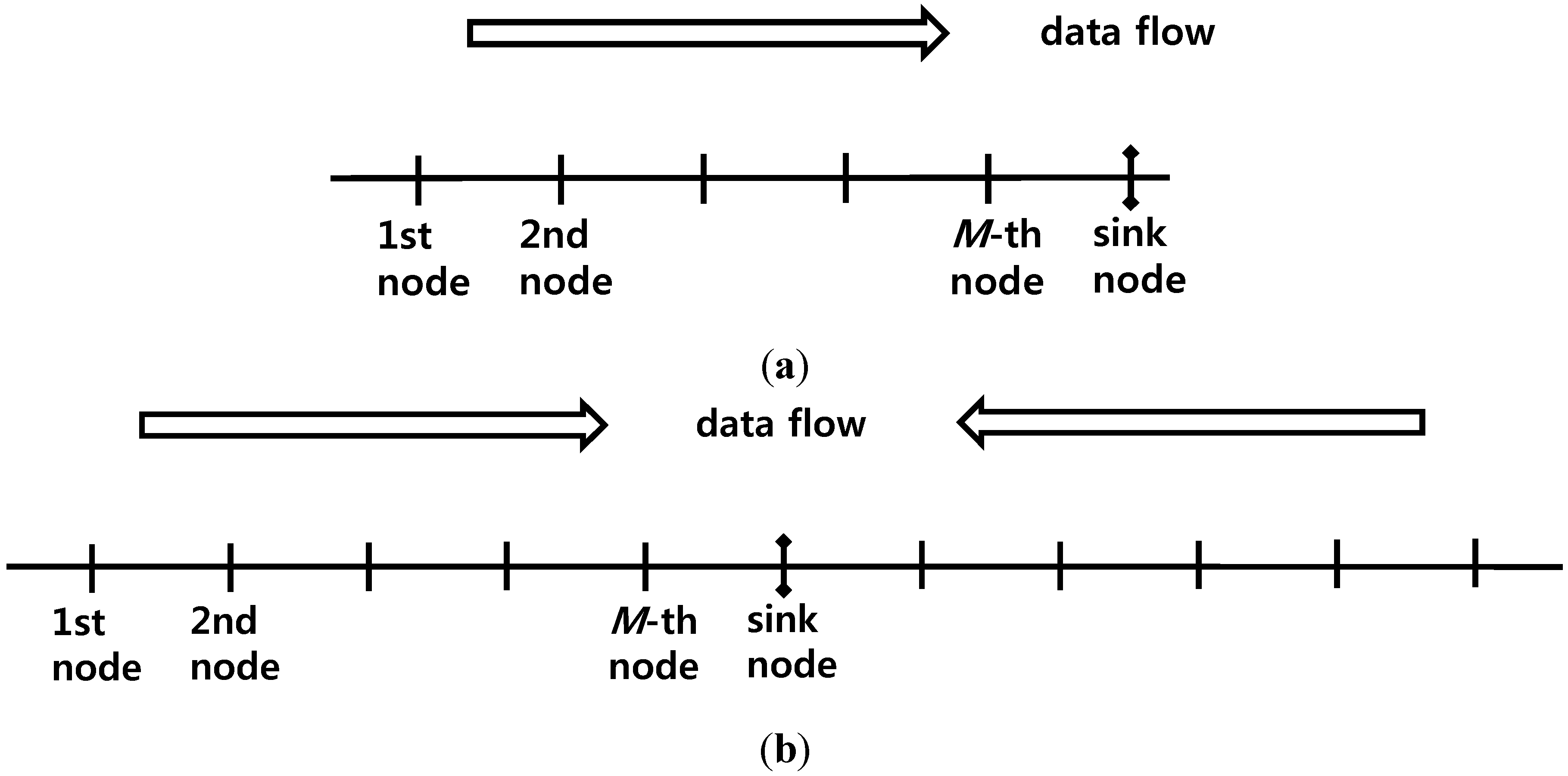
2.1. Deployment and Environments



2.2. Proposed Schemes

3. Analysis and Numerical Results
3.1. SINR and Power Analysis
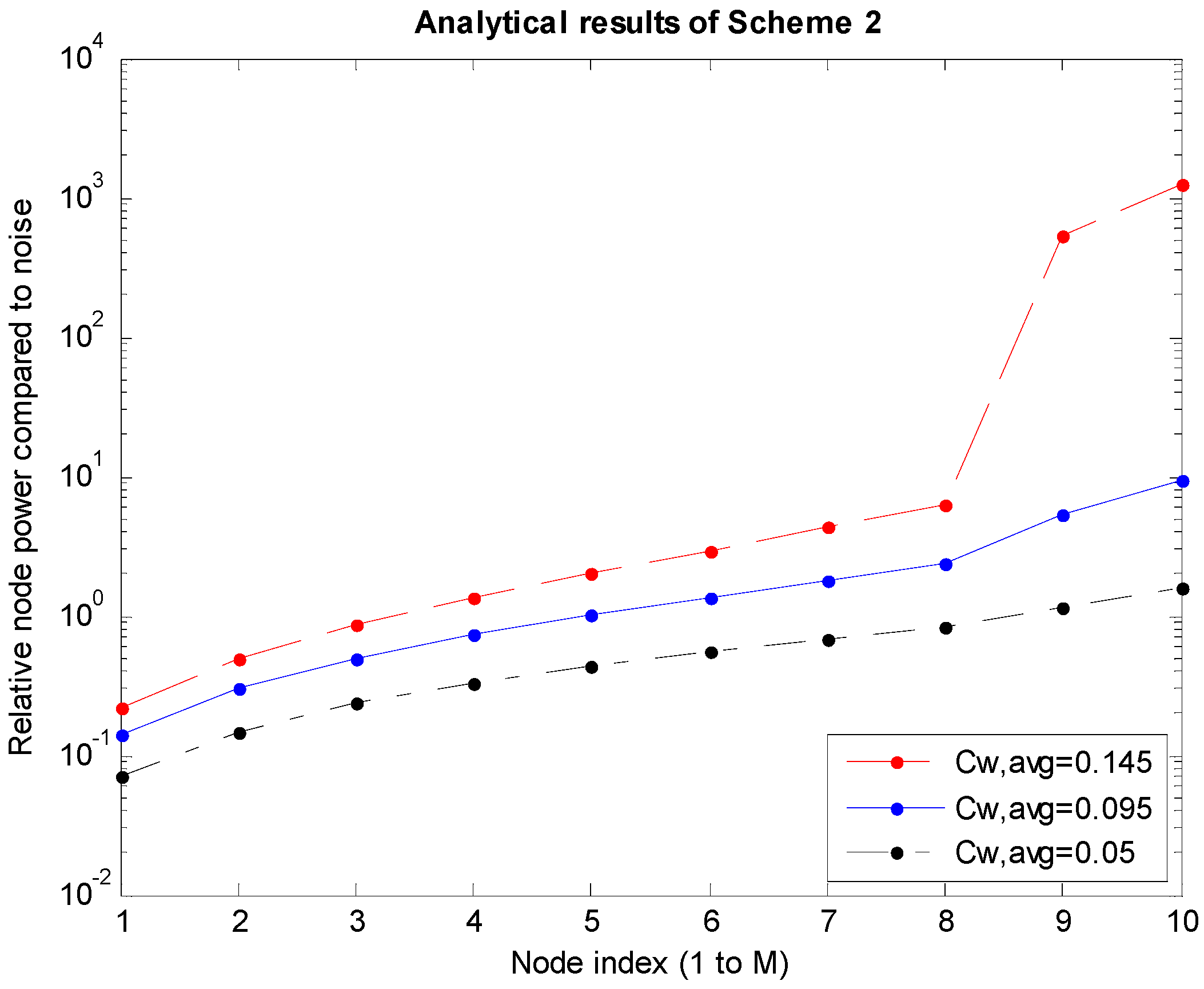
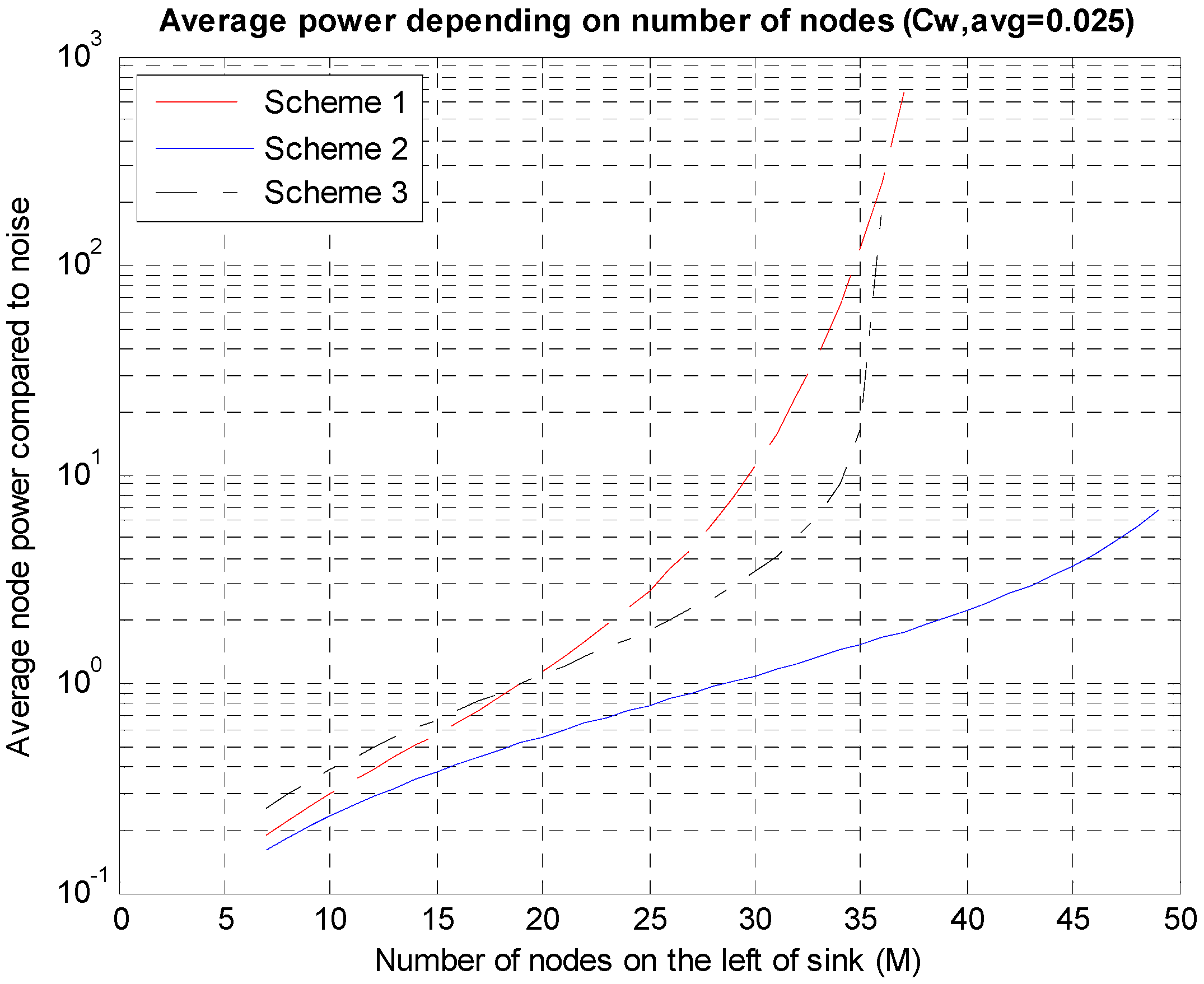
3.2. Numerical Results







4. Simulation Results
4.1. Simulation Environments

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of sensor nodes (M) | 10 |
| Number of nodes including sink (N) | 11 |
| Internode distance (D) | 100 m |
| Center frequency (fc) | 6 kHz |
| Bandwidth (fBW) | 2 kHz |
| Symbol rate (symbol/s) | 2 ksps |
| Sound speed | 1500 m/s |
| Frame size (Tf) | 0.067 s |
| Number of symbols in a frame | 120 symbols |
| Transmit power limit | 48 W (46.8 dBm) |
| Additive Gaussian noise | [14] |
| Path loss model | [15,16] |
| Data modulation | Uncoded QPSK |
| Target bit error rate (BER) for one hop | 1% |
| Channel impulse responses | Generated based on East Sea of Korea |
| Time (s) | 0 | 0.0000676 | 0.225 | 0.227 | 0.229 | 0.231 |
| Relative Power (W/W) | 1 | 0.871 | 0.0522 | 3.17 × 10−4 | 3.20 × 10−4 | 1.95 × 10−6 |


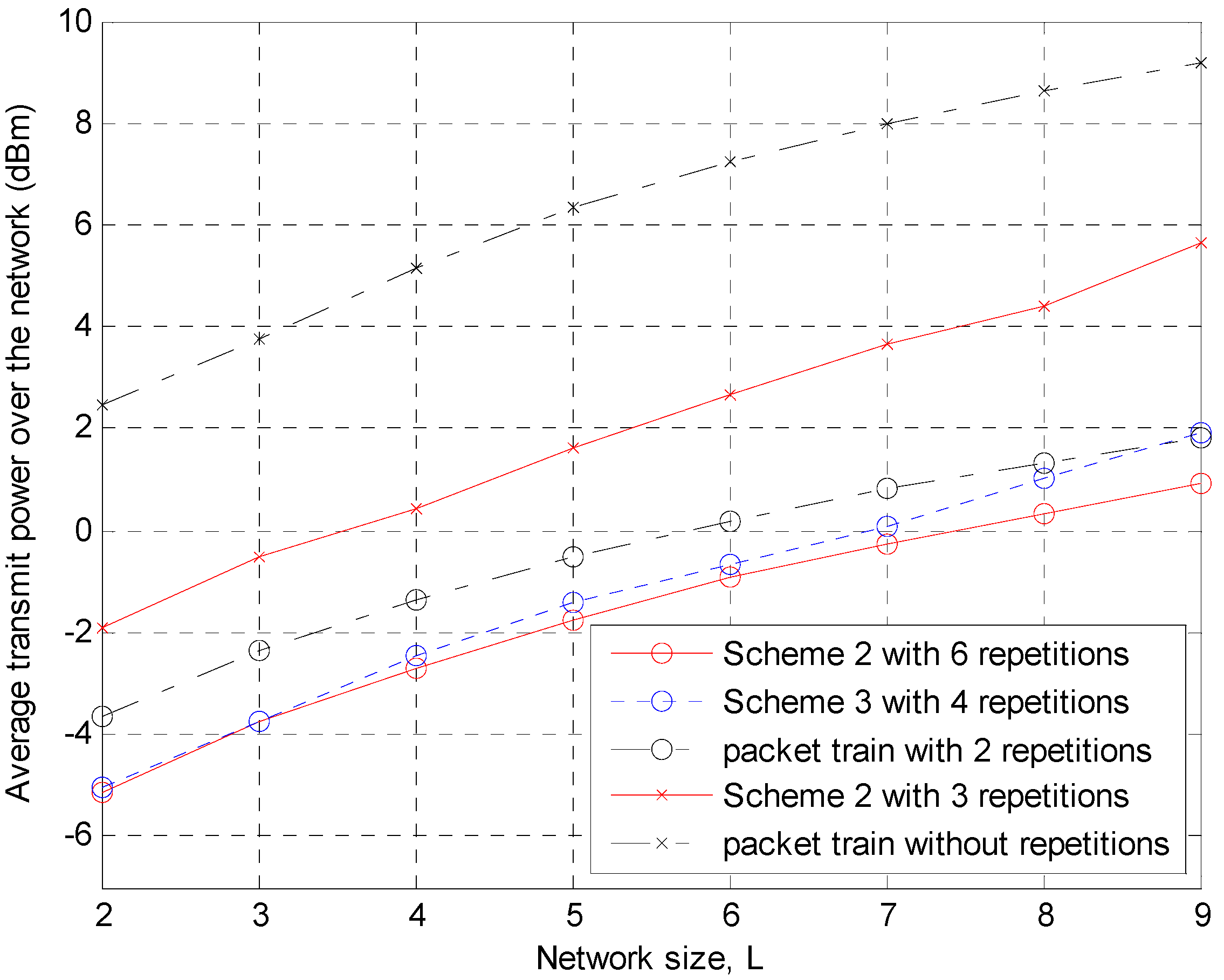
4.2. Simulation Results
| Scenario | Scheme |
|---|---|
| 1 | Scheme 1 with 6 repetitions |
| 2 | Scheme 2 with 6 repetitions |
| 3 | Scheme 3 with 4 repetitions |
| 4 | Packet train method with 2 repetitions |
| 5 | Scheme 1 with 3 repetitions |
| 6 | Scheme 2 with 3 repetitions |
| 7 | Scheme 3 with 2 repetitions |
| 8 | Packet train method without repetitions |




5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cui, J.; Kong, J.; Gerla, M.; Zhou, S. The challenges of building scalable mobile underwater wireless sensor networks for aquatic applications. IEEE Netw. 2006, 20, 12–18. [Google Scholar]
- Jaruwatanadilok, S. Underwater wireless optical communication channel modeling and performance evaluation using vector radiative transfer theory. IEEE J. Sel. Areas Commun. 2008, 26, 1620–1627. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Challenges for efficient communication in underwater acoustic sensor networks. ACM Sigbed Rev. 2004, 1, 3–8. [Google Scholar] [CrossRef]
- Sozer, E.; Stojanovic, M.; Proakis, J. Underwater acoustic networks. IEEE J. Ocean. Eng. 2000, 25, 72–83. [Google Scholar] [CrossRef]
- Chirdchoo, N.; Soh, W.-S.; Chua, K.C. MACA-MN: A MACA-based MAC protocol for underwater acoustic networks with packet train for multiple neighbors. In Proceedings of the Vehicular Technology Conference, 2008, Singapore, 11–14 May 2008; pp. 46–50.
- Ng, H.-H.; Soh, W.-S.; Motani, M. An underwater acoustic MAC protocol using reverse opportunistic packet appending. Comput. Netw. 2013, 57, 2733–2751. [Google Scholar] [CrossRef]
- Ng, H.-H.; Soh, W.-S.; Motani, M. A bidirectional-concurrent MAC protocol with packet bursting for underwater acoustic networks. IEEE J. Ocean. Eng. 2013, 38, 547–565. [Google Scholar] [CrossRef]
- Molins, M.; Stojanovic, M. Slotted fama: A MAC protocol for underwater acoustic networks. In Proceedings of the OCEANS 2006–Asia Pacific, Singapore, 16–19 May 2007; pp. 1–7.
- Peleato, B.; Stojanovic, M. Distance aware collision avoidance protocol for ad-hoc underwater acoustic sensor networks. IEEE Commun. Lett. 2007, 11, 1025–1027. [Google Scholar] [CrossRef]
- Lee, J.-W.; Cho, H.-S. Cascading multi-hop reservation and transmission in underwater acoustic sensor networks. Sensors 2014, 14, 18390–18409. [Google Scholar] [CrossRef] [PubMed]
- Liao, W.-H.; Huang, C.-C. SF-MAC: A spatially fair mac protocol for underwater acoustic sensor networks. IEEE Sens. J. 2012, 12, 1686–1694. [Google Scholar] [CrossRef]
- Pelekanakis, C.; Stojanovic, M.; Freitag, L. High rate acoustic link for underwater video transmission. In Proceedings of the OCEANS 2003, San Diego, CA, USA, 22–26 September 2003; pp. 1091–1097.
- Ribas, J.; Sura, D.; Stojanovic, M. Underwater wireless video transmission for supervisory control and inspection using acoustic OFDM. In Proceedings of the OCEANS 2010, Seattle, WA, USA, 20–23 September 2010; pp. 1–9.
- Stojanovic, M. On the relationship between capacity and distance in an underwater acoustic communication channel. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2007, 11, 34–43. [Google Scholar] [CrossRef]
- Jornet, J.M.; Stojanovic, M.; Zorzi, M. On joint frequency and power allocation in a cross-layer protocol for underwater acoustic networks. IEEE J. Ocean. Eng. 2010, 35, 936–947. [Google Scholar] [CrossRef]
- Model ITC-1001 (Transducer). Available online: http://www.channeltechgroup.com/publication/view/model-itc-1001-spherical-omnidirectional-transducer/ (accessed on 5 August 2015).
- Gallimore, E.; Partan, J.; Vaughn, I.; Singh, S.; Shusta, J.; Freitag, L. The WHOI micromodem-2: A scalable system for acoustic communications and networking. In Proceedings of the OCEANS 2010, Seattle, WA, USA, 20–23 September 2010; pp. 1–7.
- Hydro International (Acoustic Modems). Available online: http://www.hydro-international.com/files/productsurvey_v_pdfdocument_15.pdf (accessed on 5 August 2015).
- Lin, S.; Costello, D. Error Control Coding, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2004. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, J.K.; Seo, B.-M.; Yun, K.; Cho, H.-S. Time-Efficient High-Rate Data Flooding in One-Dimensional Acoustic Underwater Sensor Networks. Sensors 2015, 15, 27671-27691. https://doi.org/10.3390/s151127671
Kwon JK, Seo B-M, Yun K, Cho H-S. Time-Efficient High-Rate Data Flooding in One-Dimensional Acoustic Underwater Sensor Networks. Sensors. 2015; 15(11):27671-27691. https://doi.org/10.3390/s151127671
Chicago/Turabian StyleKwon, Jae Kyun, Bo-Min Seo, Kyungsu Yun, and Ho-Shin Cho. 2015. "Time-Efficient High-Rate Data Flooding in One-Dimensional Acoustic Underwater Sensor Networks" Sensors 15, no. 11: 27671-27691. https://doi.org/10.3390/s151127671