
A New Open-Loop Fiber Optic Gyro Error Compensation Method Based on Angular Velocity Error Modeling

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The OFOG Angular Velocity Error Model
2.1. The OFOG Composition

2.2. The OFOG Output Signal
3. The Scheme of Modeling and Compensation of OFOG Angular Velocity Error
3.1. The Variable Selection for Modeling

3.2. The Choice and Establishment of the Model

3.3. The Method of Error Compensation

4. Experiments and Results
4.1. Experimental Scenario

4.2. Data Acquisition
4.3. The Analysis of Relative Change Rate


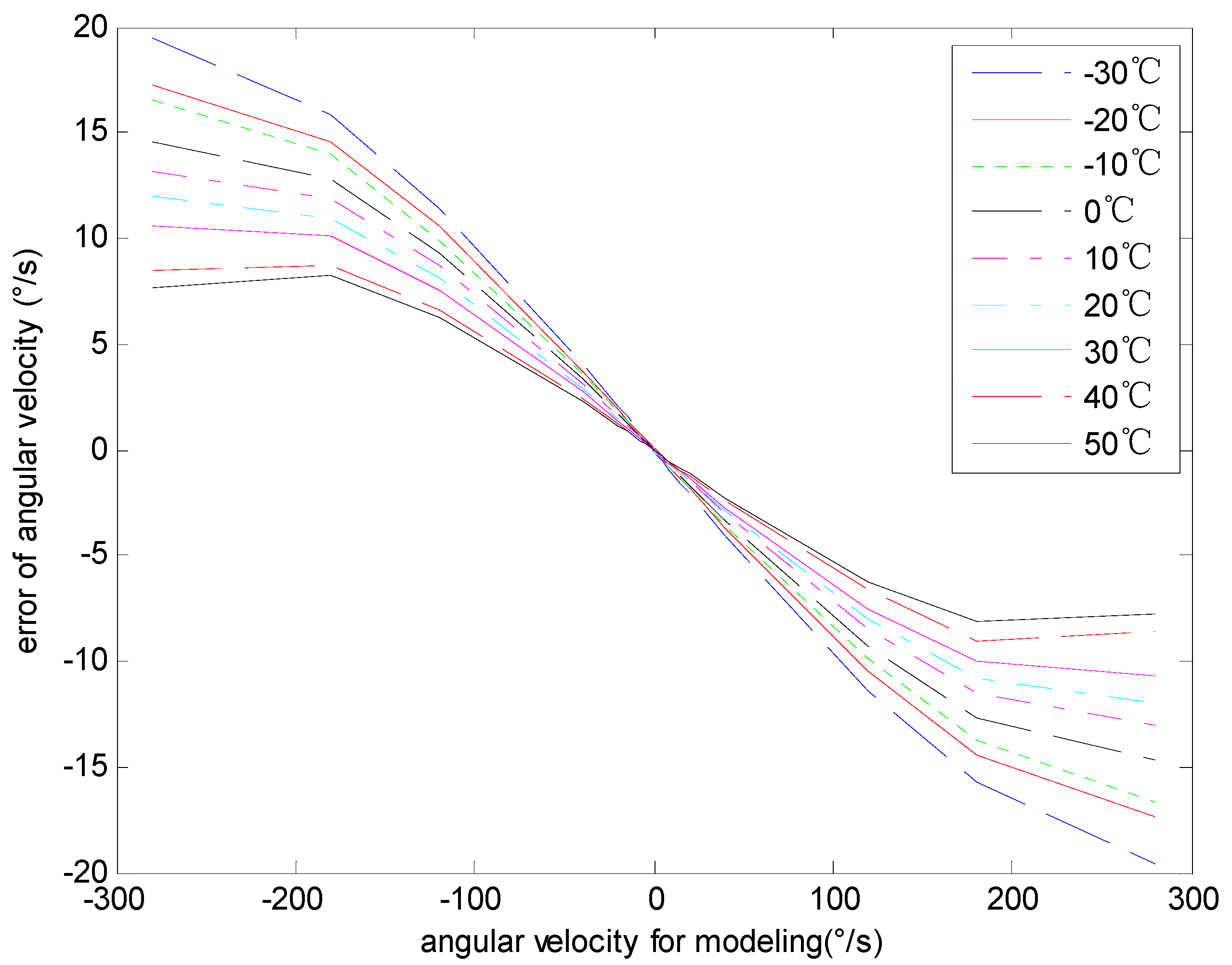
4.4. The Analysis of the Angular Velocity Error


4.5. The Neutral Network Modeling

4.6. The Analysis of the Effect of Error Estimation


5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shen, C.; Chen, X. Analysis and modeling for fiber-optic gyroscope scale factor based on environment temperature. Appl. Opt. 2012, 51, 2541–2547. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Song, R.; Shen, C.; Zhang, H. Application of a genetic algorithm Elman network in temperature drift modeling for a fiber-optic gyroscope. Appl. Opt. 2014, 53, 6043–6050. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.S.; Wang, Y.Y.; Yang, T.; Yin, R.; Fang, J.C. Dynamic angular velocity modeling and error compensation of one-fiber fiber optic gyroscope (OFFOG) in the whole temperature range. Meas. Sci. Technol. 2012, 23, 1–6. [Google Scholar]
- Zhang, Y.-S.; Cheng, J.-B.; Tang, J.-Q. Key technology and application prospect of the one-fiber fiber-optical gyroscope. Opt. Tech. 2004, 30, 251–253. [Google Scholar]
- Chen, X.; Shen, C. Study on error calibration of fiber optic gyroscope under intense ambient temperature variation. Appl. Opt. 2012, 51, 3755–3762. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Shen, C. Study on temperature error processing technique for fiber optic gyroscope. Opt. Int. J. Light Electron Opt. 2013, 124, 784–792. [Google Scholar] [CrossRef]
- Song, R.; Chen, X.; Shen, C.; Zhang, H. Modeling FOG Drift Using Back-Propagation Neural Network Optimized by Artificial Fish Swarm Algorithm. J. Sens. 2014, 2014. [Google Scholar] [CrossRef]
- Emge, S.; Bennett, S.; Dyott, R.; Brunner, J.; Allen, D. Reduced minimum configuration fiber optic gyro for land navigation applications. IEEE Aerosp. Electron. Syst. Mag. 1997, 12, 18–21. [Google Scholar] [CrossRef]
- Dyott, R.B.; Bennett, S.M.; Allen, D.; Brunner, J. Development and Commercialization of Open Loop Fiber Gyros at KVH Industries (Formerly at Andrew). In Proceedings of the Optical Fiber Sensors Conference Technical Digest, Portland, OR, USA, 10 May 2002; Volume 1, pp. 19–22.
- Moeller, R.P.; Burns, W.K.; Frigo, N.J. Open-loop output and scale factor stability in a fiber-optic gyroscope. J. Lightw. Technol. 1989, 7, 262–269. [Google Scholar] [CrossRef]
- Thielman, L.O.; Bennett, S.; Barker, C.H.; Ash, M.E. Proposed IEEE Coriolis Vibratory Gyro standard and other inertial sensor standards. In Proceedings of the Position Location and Navigation Symposium, Palm Springs, 4–6 May 2002; pp. 351–358.
- Liaw, C.-Y.; Zhou, Y.; Lam, Y.-L. Characterization of an open-loop interferometric fiber-optic gyroscope with the Sagnac coil closed by an erbium-doped fiber amplifier. J. Lightw. Technol. 1998, 16, 2385–2392. [Google Scholar] [CrossRef]
- Medjadba, H.; si Mohamed, L.M. Low cost technique for improving open loop fiber optic gyroscope scale factor linearity. Inf. Commun. Technol. 2006, 2057, 24–28. [Google Scholar]
- Wang, Z.; Yang, Y.; Lu, P.; Li, Y.; Zhao, D.; Peng, C.; Zhang, Z.; Li, Z. All-Depolarized Interferometric Fiber-Optic Gyroscope Based on Optical Compensation. IEEE Photon. J. 2014, 6, 1–8. [Google Scholar]
- Ferreira, E.C.; de Melo, F.F.; Siqueira Dias, J.A. Precision analog demodulation technique for open-loop Sagnac fiber optic gyroscopes. Rev. Sci. Instrum. 2007, 78, 024704. [Google Scholar] [CrossRef] [PubMed]
- Almeida, V.R.; da Silva, A.C.; Oliveira, J.EB. High Dynamic Range Fiber Optic Gyroscope Demodulation Technique Based on Triangular Waveform Phase Modulation. In Proceedings of the International Microwave and Optoelectronics Conference, 1999, SBMO/IEEE MTT-S, APS and LEOS—IMOC’99. Rio de Janeiro, 9–12 August 1999; pp. 405–409.
- Avanaki, M.R.N. Full Progress of Digital Signal Processing in Open Loop-IFOG. In Proceedings of the Optical Fiber Communication & Optoelectronic Exposition & Conference (AOE 2006), Asian, Shanghai, China, 24–27 October 2006; pp. 1–10.
- Rodriguez, R.B.G.; Ferreira, E.C. Zero-Crossing Demodulation for Open Loop Fiber Optic Gyroscopes. In Proceedings of the 2001 International Microwave and Optoelectronics Conference, IMOC 2001, SBMO/IEEE MTT-S. Belem, Brazil, 6–10 August 2001; pp. 149–152.
- Zhang, Y.; Zhou, Z.; Fan, J. Error compensation method based on neural network for open-loop FOG. J. Data Acquis. Process. 2008, 23, 104–107. [Google Scholar]
- Jin, Z.; Yang, Z.; Ma, H.; Ying, D. Open-Loop Experiments in a Resonator Fiber-Optic Gyro Using Digital Triangle Wave Phase Modulation. IEEE Photon. Technol. Lett. 2007, 19, 1685–1687. [Google Scholar] [CrossRef]
- Hotate, K.; Harumoto, M. Resonator fiber optic gyro using digital serrodyne modulation. J. Lightw. Technol. 1997, 15, 466–473. [Google Scholar] [CrossRef]
- Bennett, S.M.; Emge, S.; Dyott, R.B. Fiber Optic Gyroscopes for Vehicular Use. In Proceedings of the IEEE Conference on Intelligent Transportation System, Boston, MA, USA, 9–12 November 1997; Volume 1053, pp. 9–12.
- Wang, X.; Ma, S. Nonlinearity of temperature and scale factor modeling and compensating of FOG. J. Beijing Univ. Aeronaut. Astronaut. 2009, 25, 28–31. [Google Scholar]
- Zhang, G.; Deng, Z.; Fu, Z.-X. Temperature Modeling Study for Gyroscope. J. Syst. Simul. 2003, 26, 369–371. [Google Scholar]
- Wang, X.; Li, J.; Xu, H.; Li, A. Research of FOG’s Error Modeling Based on Temperature and Scale Factor Nonlinearity. J. Syst. Simul. 2007, 9, 1922–1924. [Google Scholar]
- Spammer, S.J.; Swart, P.L. A quadrature phase tracker for open-loop fiber-optic. IEEE Trans. Circuits Syst. 1993, 40, 86–91. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, C.; Wang, Z. A Novel Digital Signal Processing System for Open-Loop Fiber Optic Gyroscope. In Proceedings of the Communications and Photonics Conference (ACP) (2012 Asia), Guangzhou, China, 7–10 November 2012; Volume 1, pp. 7–10.
- Park, H.G.; Ah Lim, K.; Chin, Y.-J.; Kim, B.-Y. Feedback effects in erbium-doped fiber amplifier/source for open-loop fiber-optic gyroscope. J. Lightw. Technol. 1997, 15, 1587–1593. [Google Scholar] [CrossRef]
- Terrel, M.A.; Digonnet, M.J.F.; Fan, S. Resonant Fiber Optic Gyroscope Using an Air-Core Fiber. J. Lightw. Technol. 2012, 30, 931–937. [Google Scholar] [CrossRef]
- Zhou, K.J.; Hu, K.K.; Dong, F.Z. Single-mode fiber gyroscope with three depolarizers. OPTIK 2014, 125, 781–784. [Google Scholar] [CrossRef]
- Burse, K.; Yadav, R.N.; Shrivastava, S.C. Channel equalization using neural networks. IEEE Trans. Syst. Man Cybern. 2010, 40, 352–357. [Google Scholar] [CrossRef]
- Malleswaran, M.; Vaidehi, V.; Deborah, S.A.; Manjula, S. Comparison of RBF and BPN neural networks applied in INS and GPS integration for vehicular navigation. Int. J. Electron. Eng. Res. 2010, 2, 753–763. [Google Scholar]
- Steinwart, I.; Hush, D., Sr.; Scovel, C. An explicit description of the reproducing kernel Hilbert spaces of Gaussian RBF kernels. IEEE Trans. Inf. Theory 2006, 52, 4635–4643. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Guo, Y.; Li, C.; Wang, Y.; Wang, Z. A New Open-Loop Fiber Optic Gyro Error Compensation Method Based on Angular Velocity Error Modeling. Sensors 2015, 15, 4899-4912. https://doi.org/10.3390/s150304899
Zhang Y, Guo Y, Li C, Wang Y, Wang Z. A New Open-Loop Fiber Optic Gyro Error Compensation Method Based on Angular Velocity Error Modeling. Sensors. 2015; 15(3):4899-4912. https://doi.org/10.3390/s150304899
Chicago/Turabian StyleZhang, Yanshun, Yajing Guo, Chunyu Li, Yixin Wang, and Zhanqing Wang. 2015. "A New Open-Loop Fiber Optic Gyro Error Compensation Method Based on Angular Velocity Error Modeling" Sensors 15, no. 3: 4899-4912. https://doi.org/10.3390/s150304899
APA StyleZhang, Y., Guo, Y., Li, C., Wang, Y., & Wang, Z. (2015). A New Open-Loop Fiber Optic Gyro Error Compensation Method Based on Angular Velocity Error Modeling. Sensors, 15(3), 4899-4912. https://doi.org/10.3390/s150304899