
Self-Organizing Distributed Architecture Supporting Dynamic Space Expanding and Reducing in Indoor LBS Environment


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Service Scenario and Proposed Approach
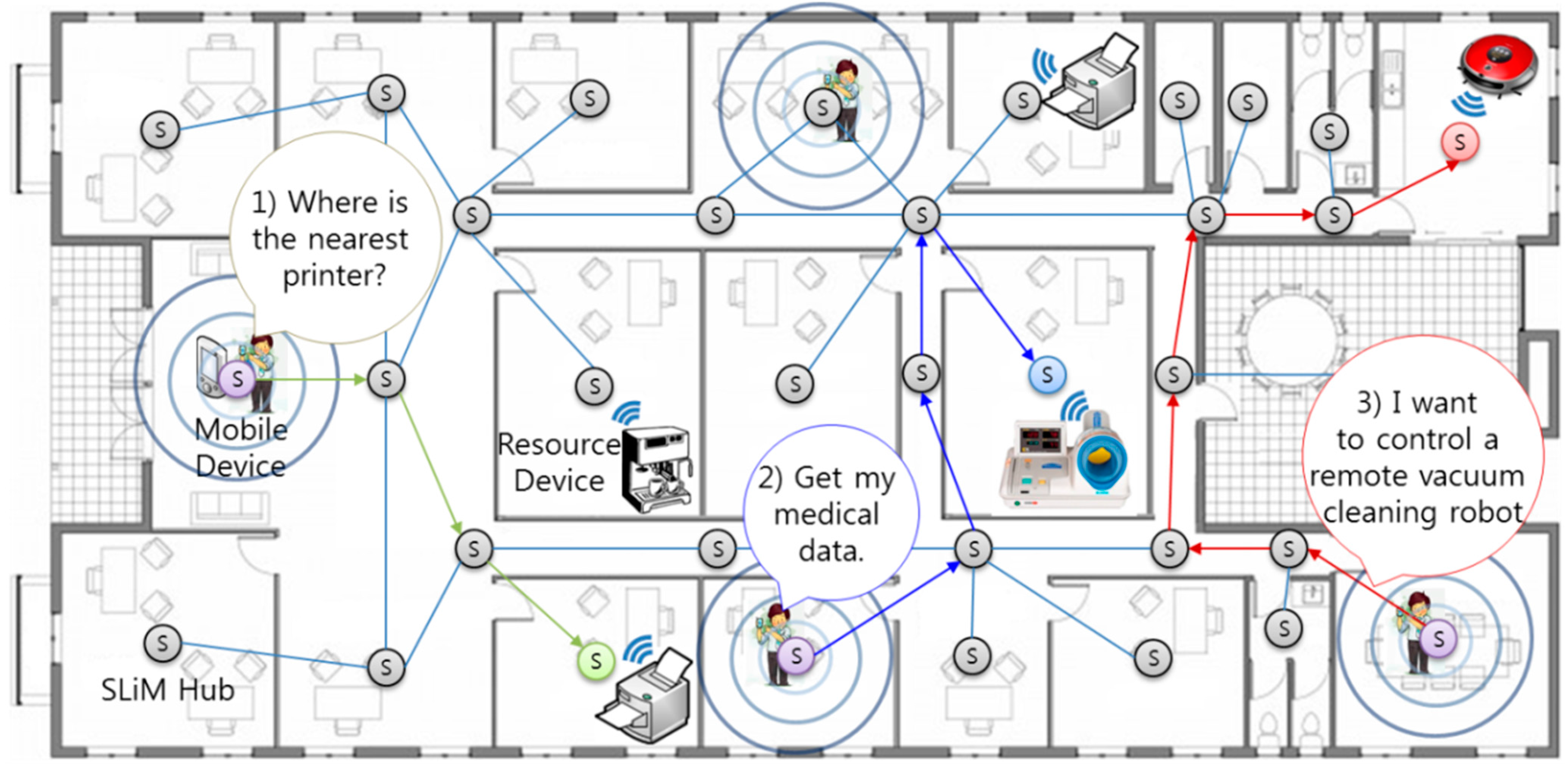
2.1. Indoor Location-Based Service Scenarios Using Proposed Approach
- (1)
- Lookup only scenario: A mobile device user can print to the nearest printer (resource device) from his current position without presetting (zero-configuration).
- (2)
- Asynchronous request-reply scenario: After using a local sphygmomanometer, the person can look up and check his or her own medical data, such as blood pressure, anywhere and anytime regardless of current location without needing to configure any settings (delay-tolerance).
- (3)
- Connection-oriented request-reply scenario: A user can remotely control a vacuum cleaning robot in real time, regardless of current location.

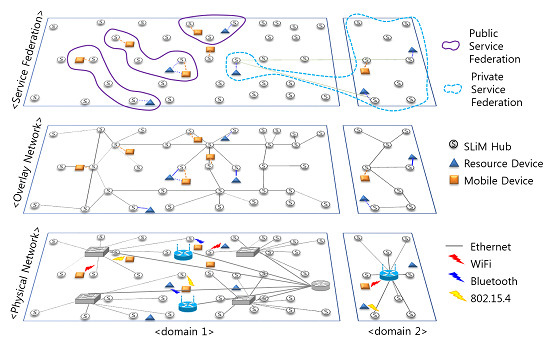
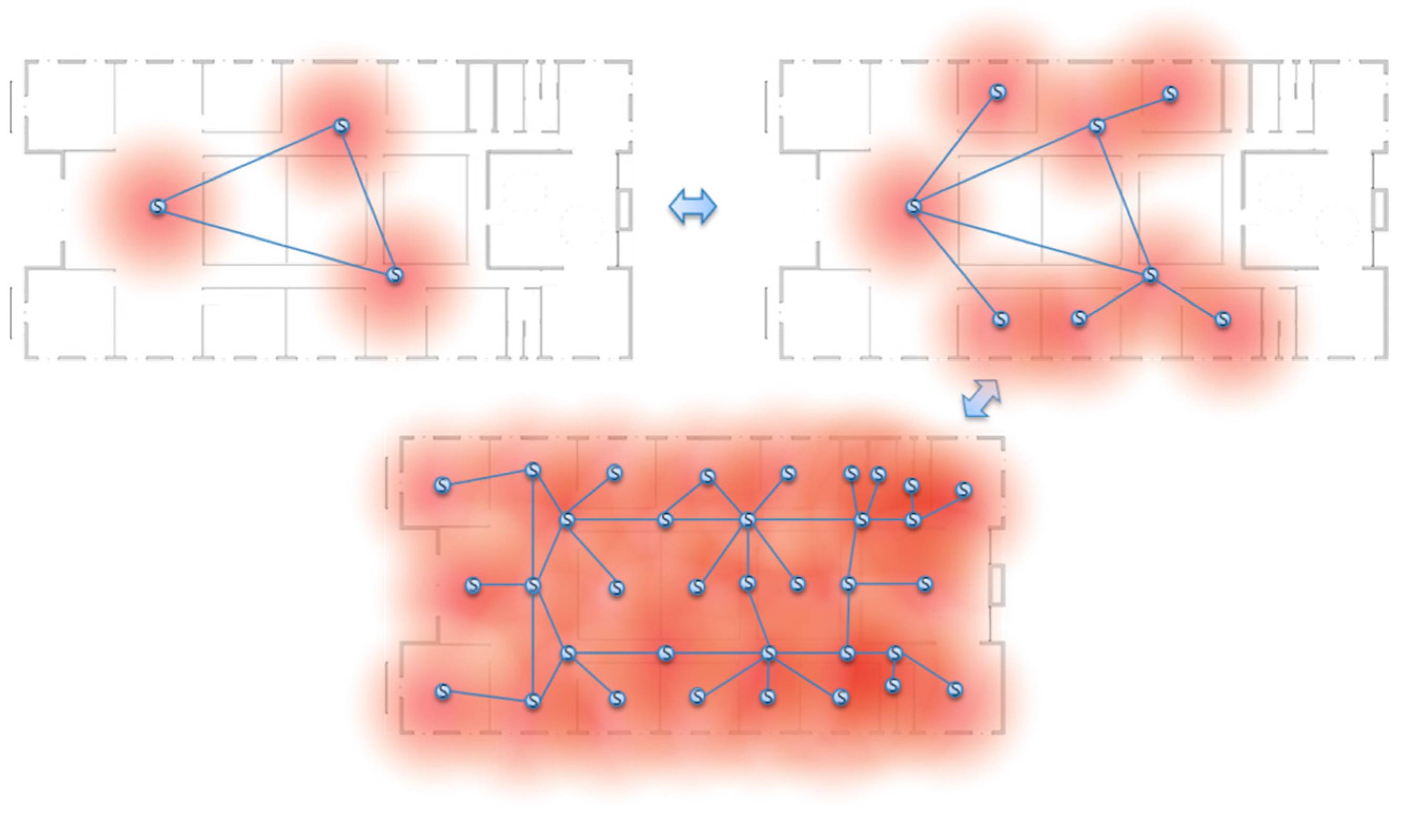
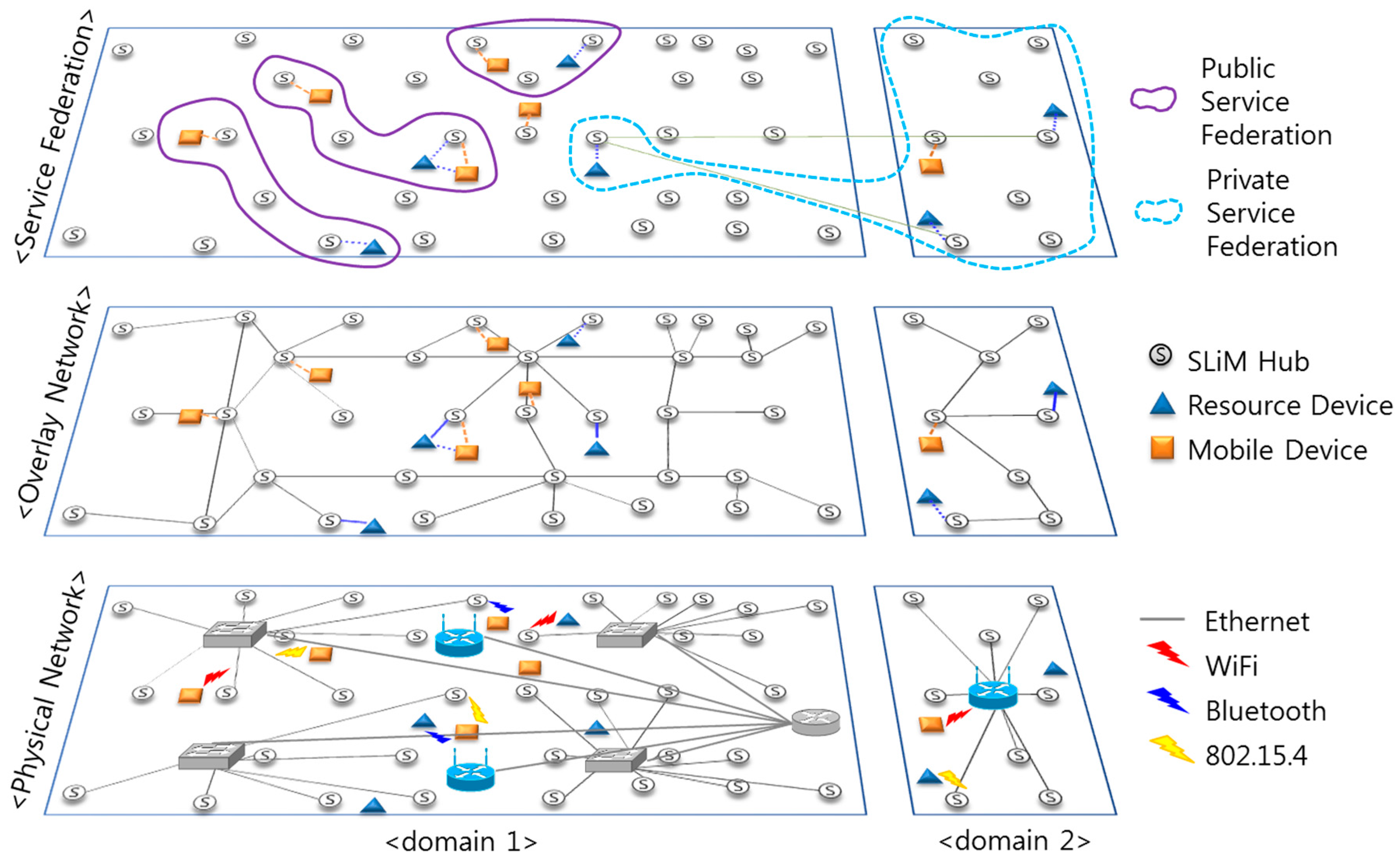
2.2. Dynamic Space Expansion and Reduction

2.3. Overlay Network-Based Application Environment

3. Related Works
4. SoSp Architecture
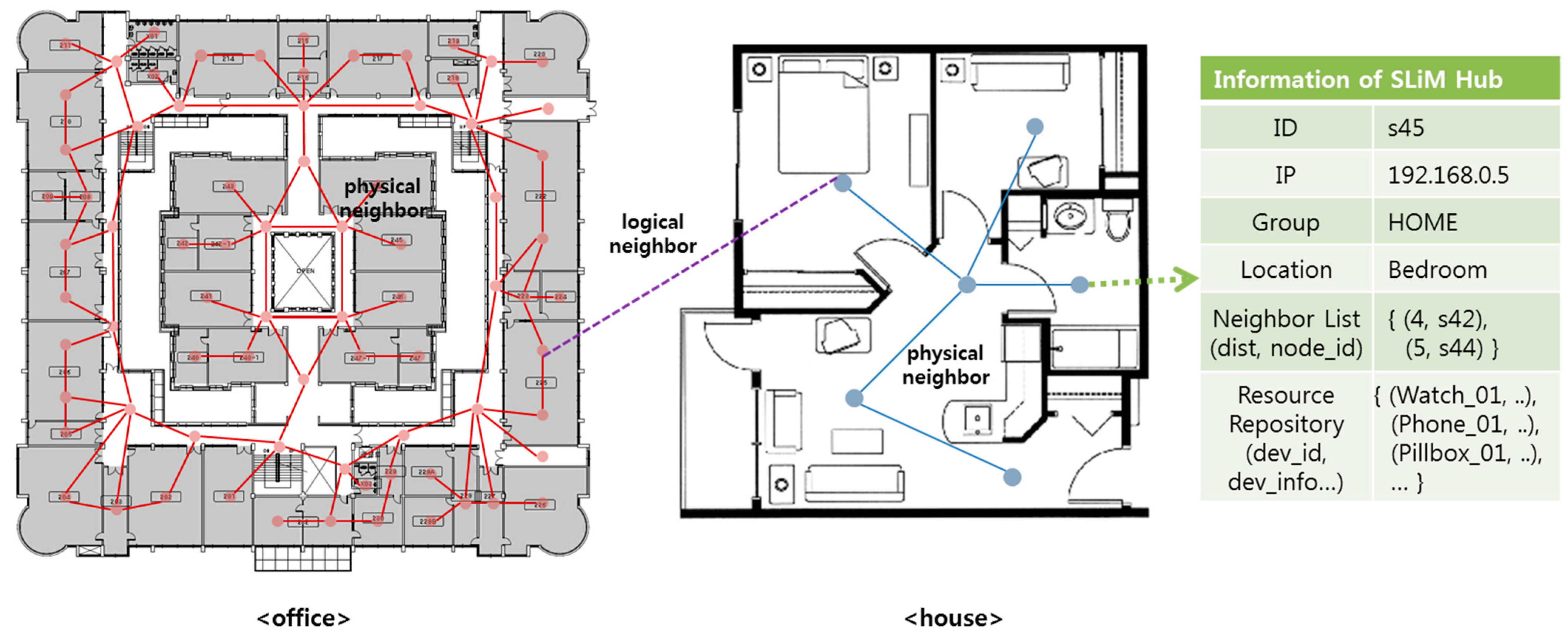
4.1. Configuring the SoSp Network Environment

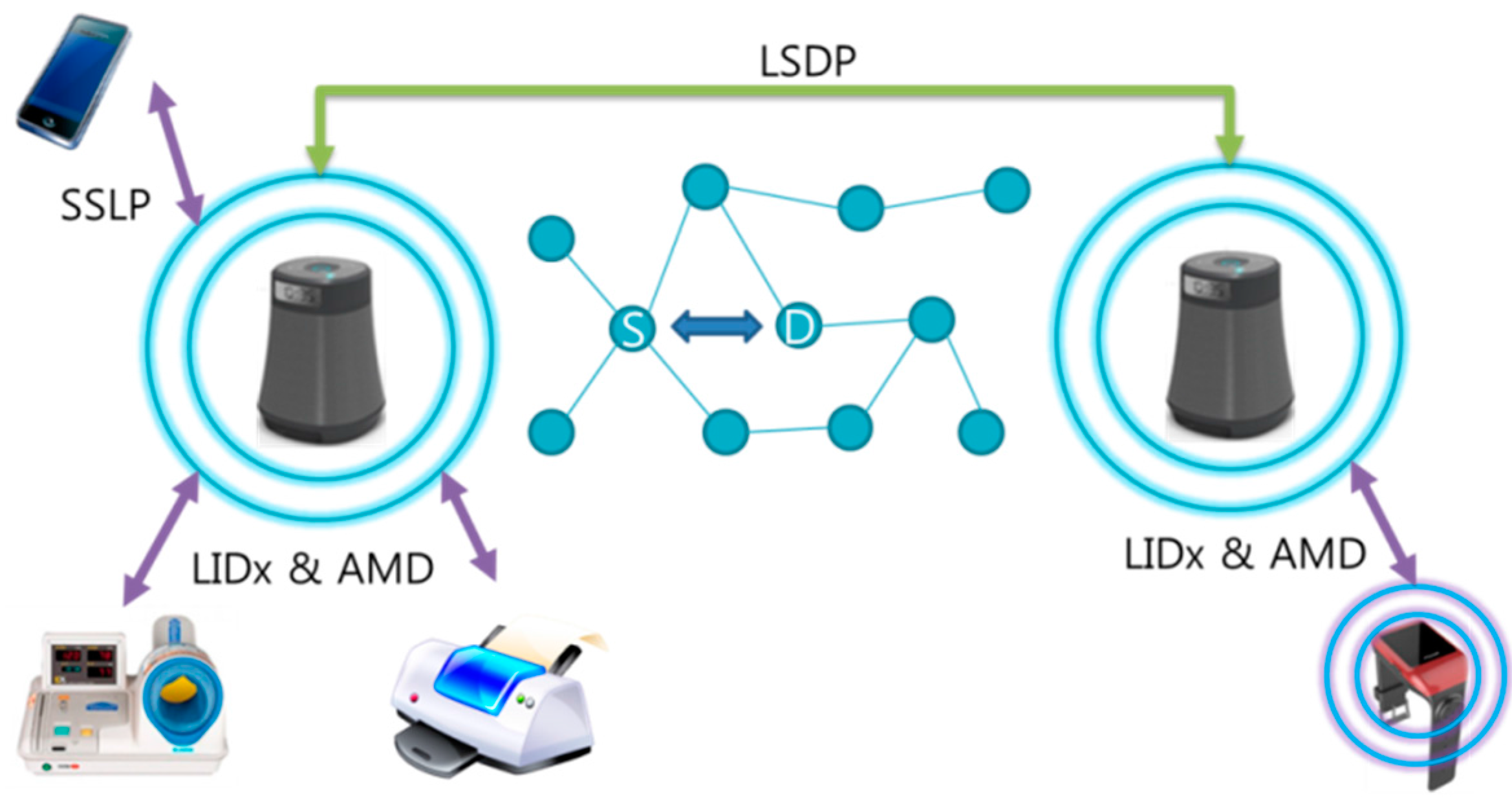
4.2. Previous Research: Protocols for Proposed Services

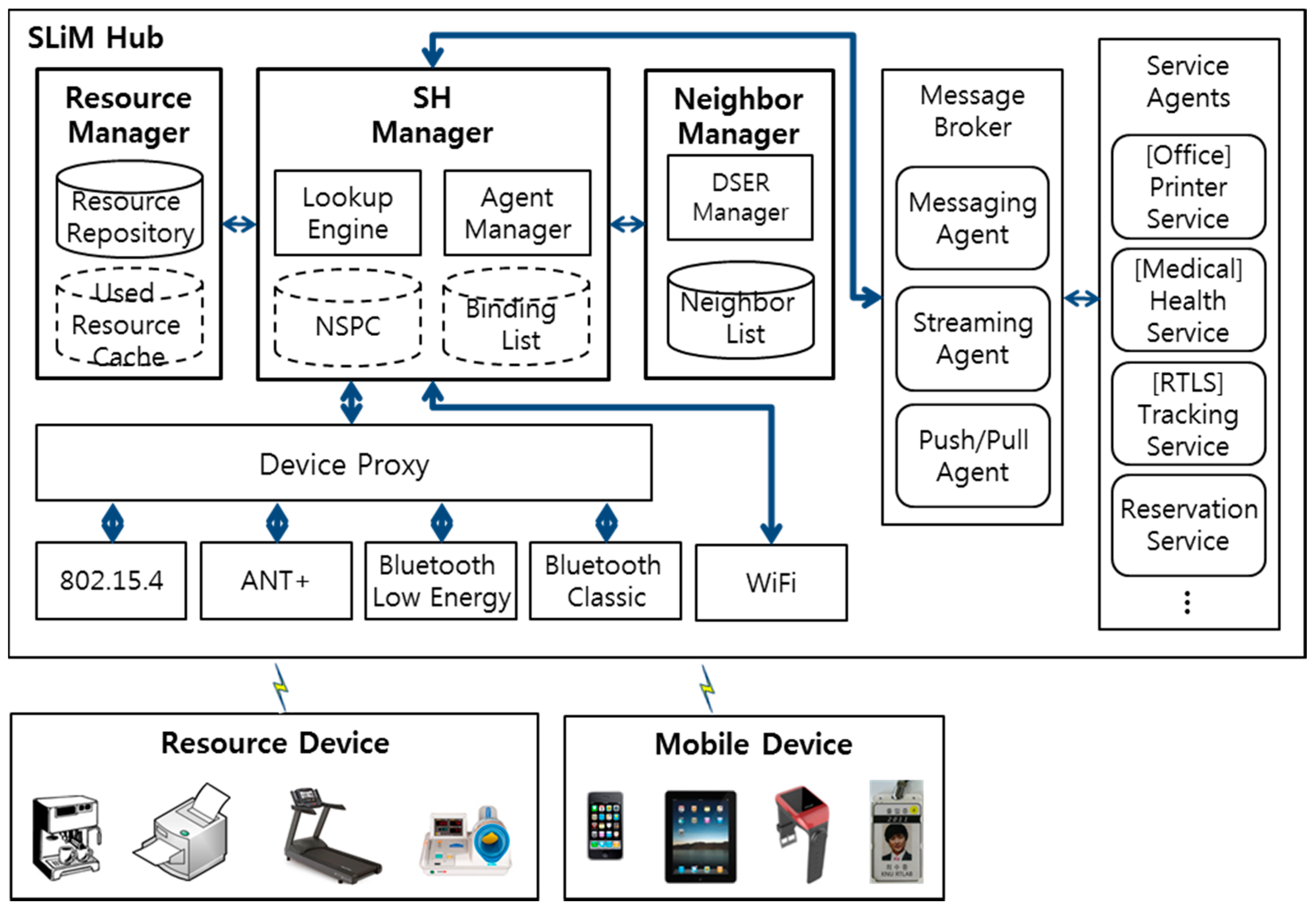
4.3. Software Architecture of the SLiM Hub
5. Self-Organizing Dynamic Space Configuration
5.1. Configuring the SoSp Overlay Network



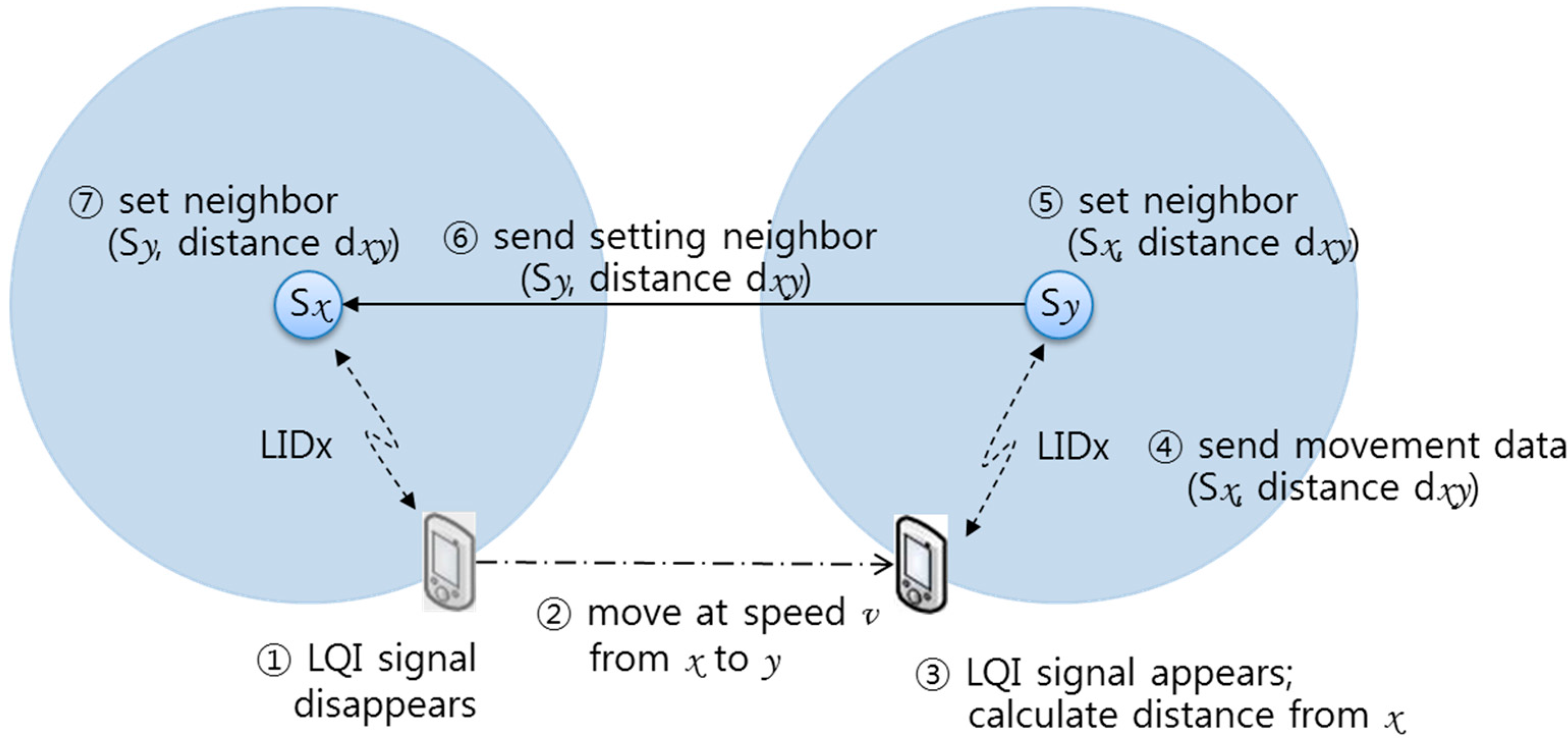
5.2. Adaptable Overlay Network in Dynamic Environment


5.3. Dynamic Space Expansion and Reduction
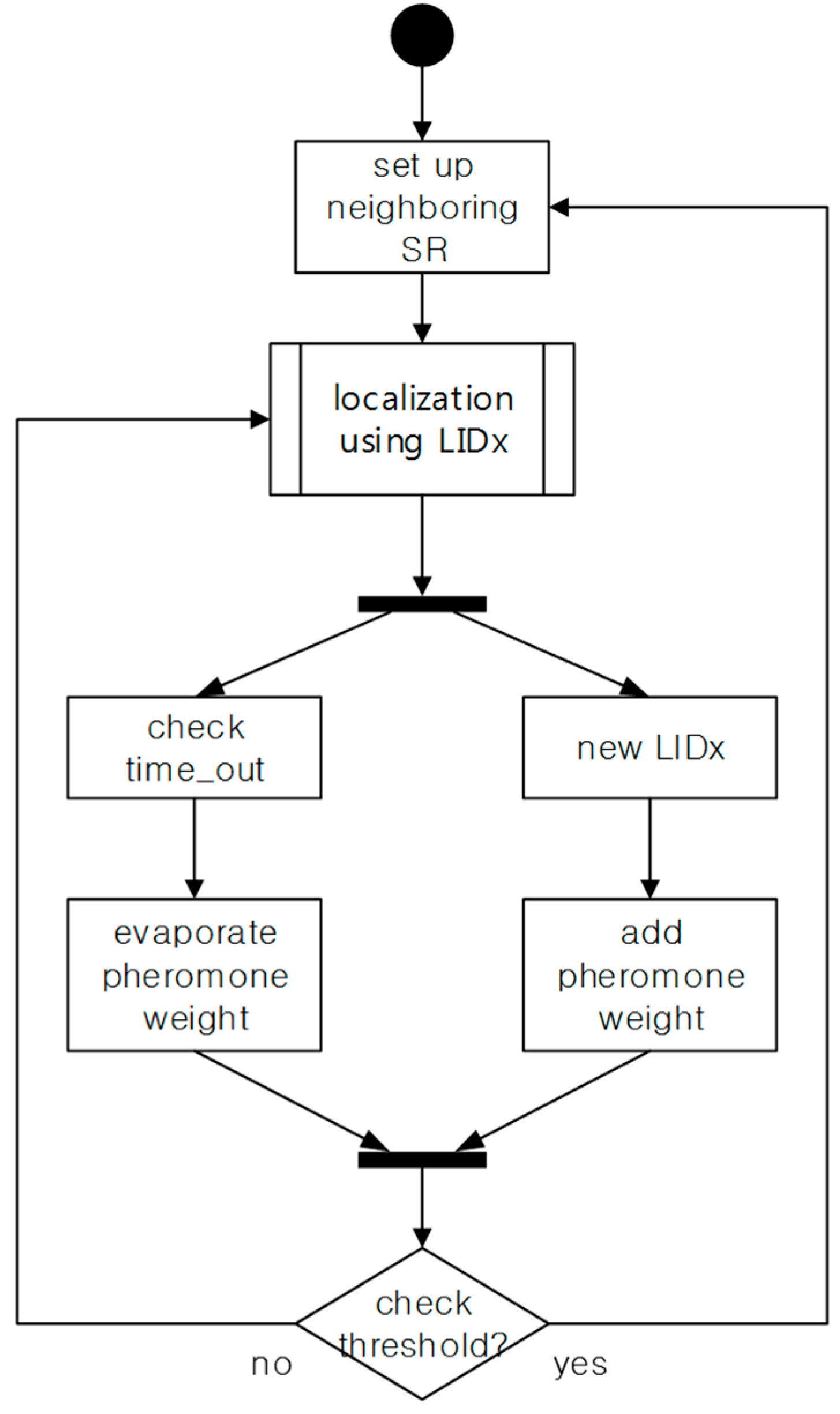
5.3.1. Heartbeat Based Neighbor Periodic Status Monitoring

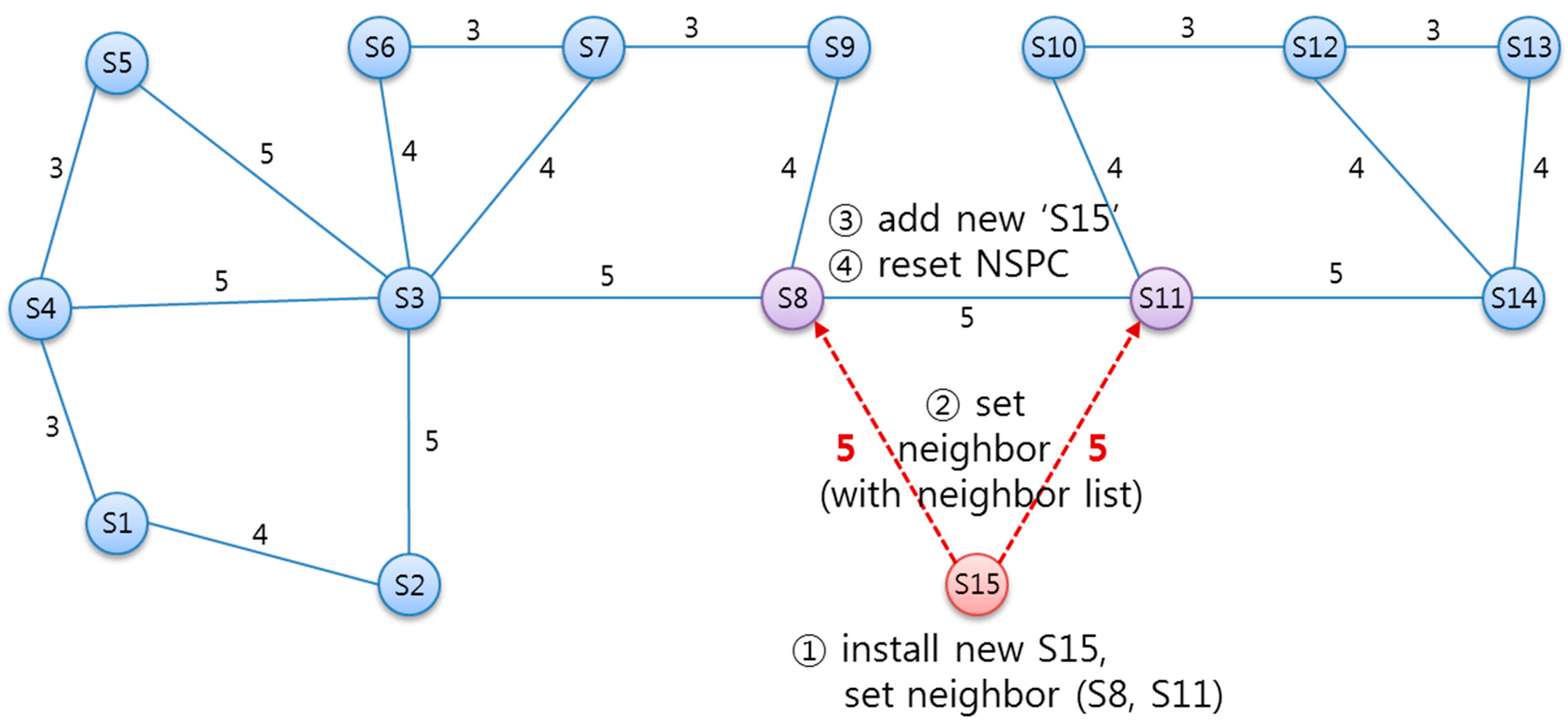
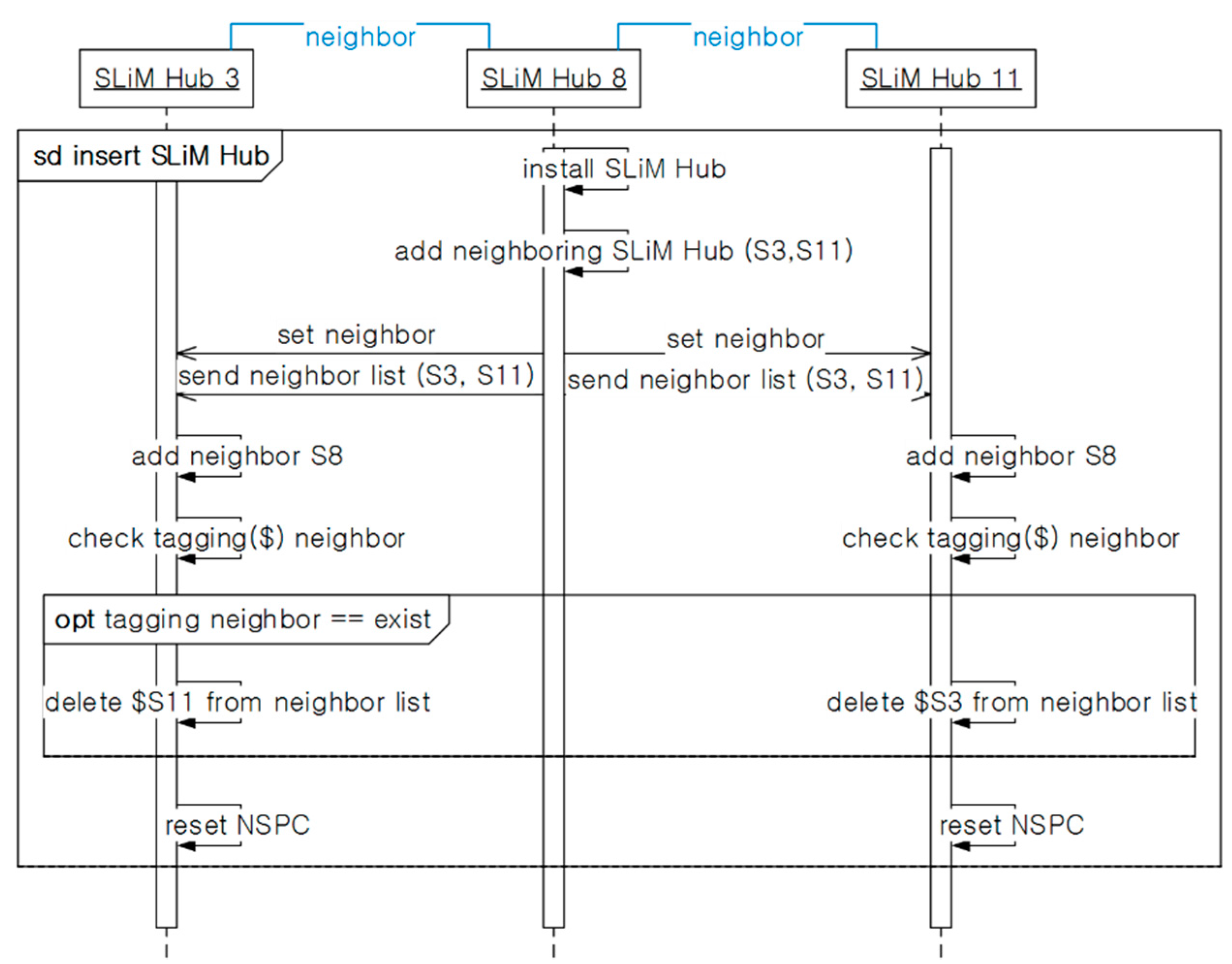
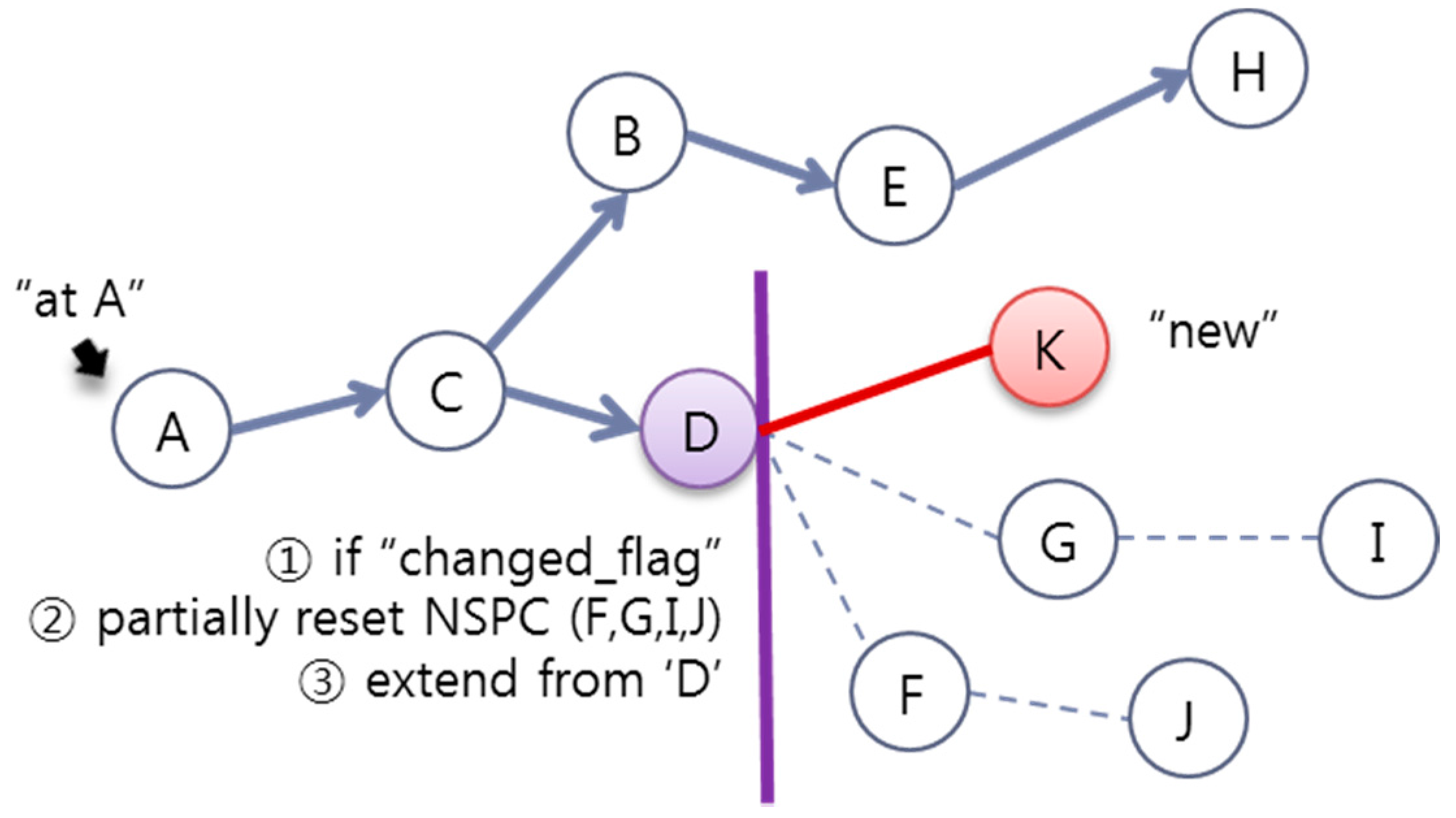
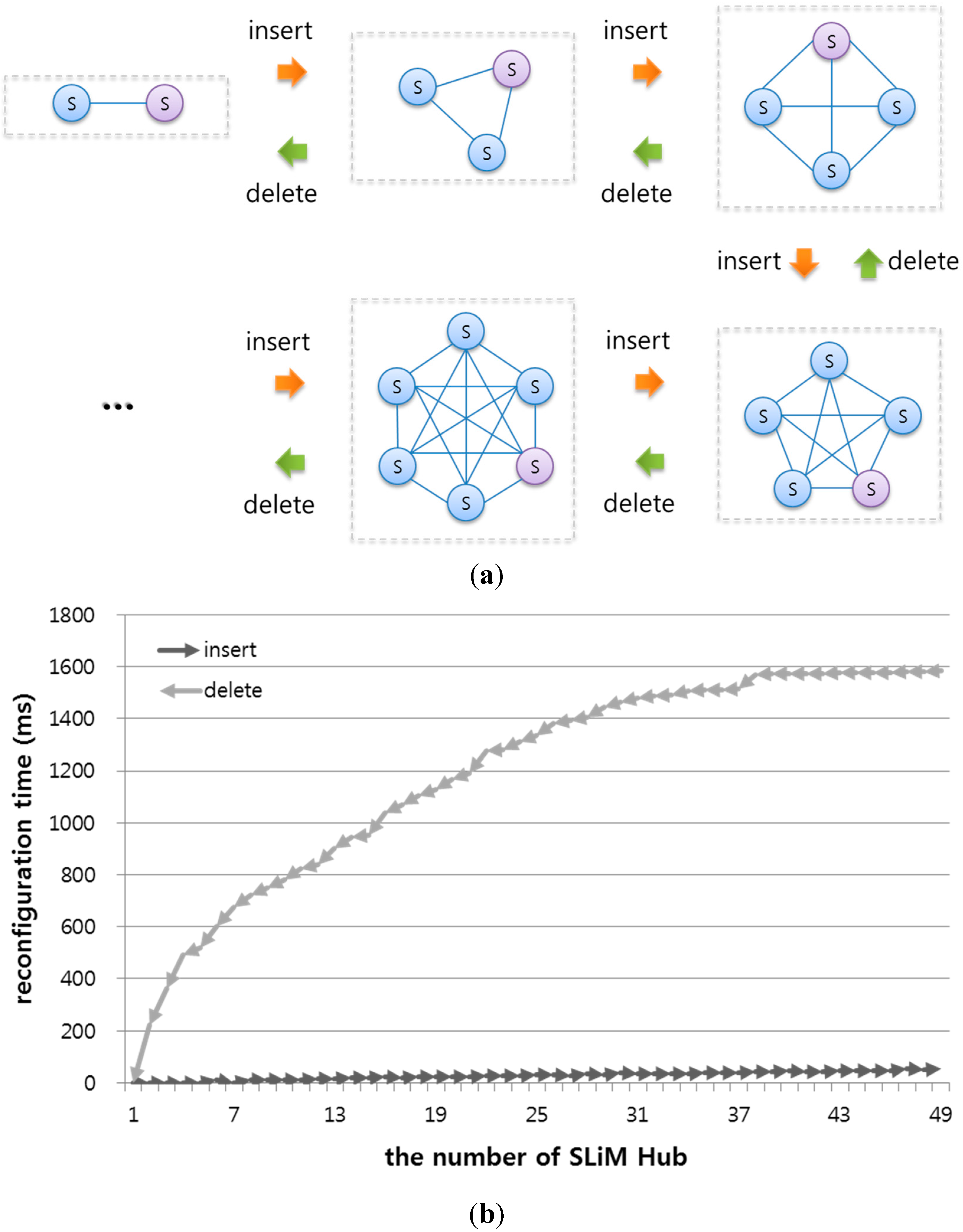
5.3.2. Inserting New SLiM Hub


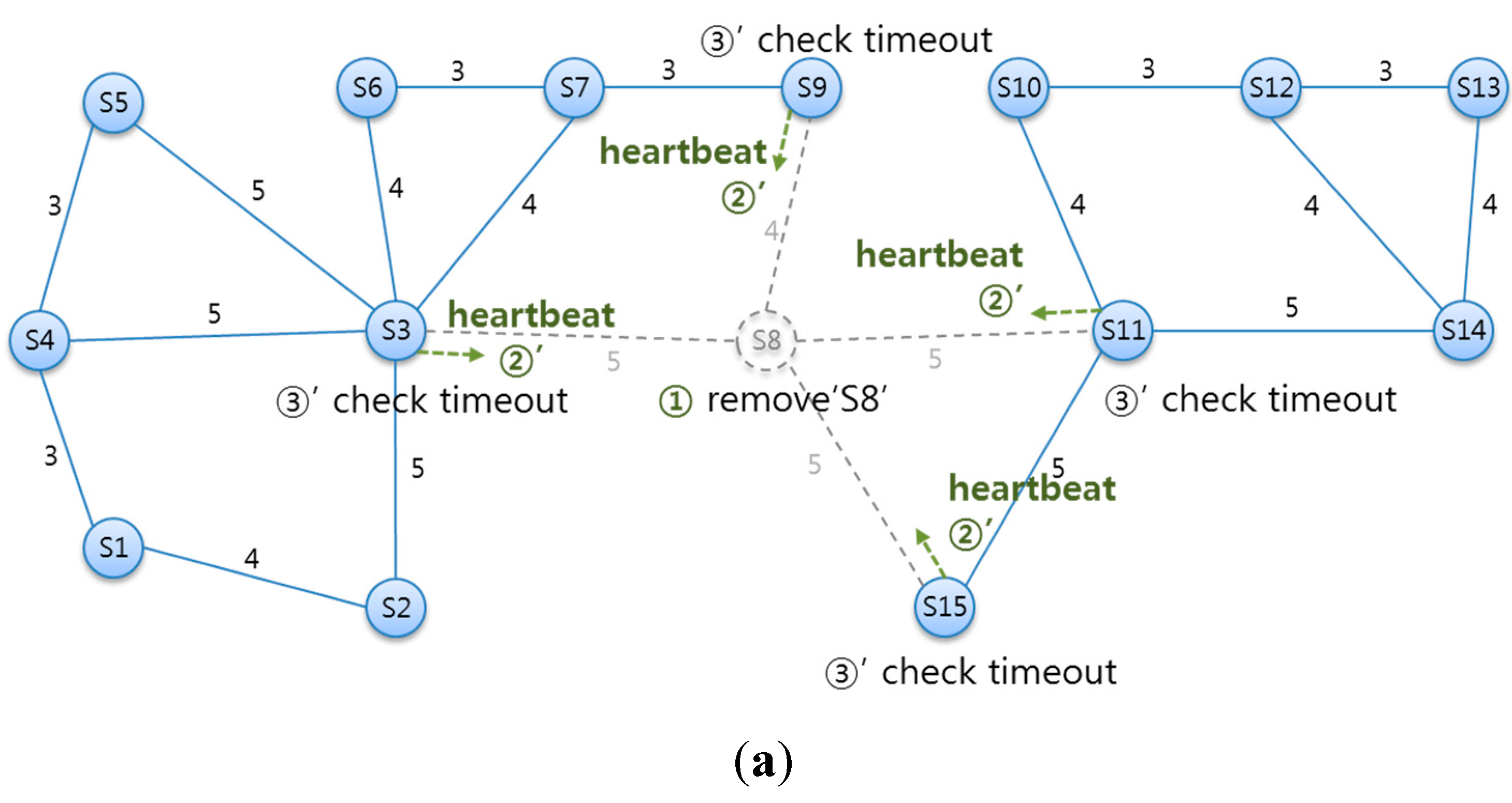
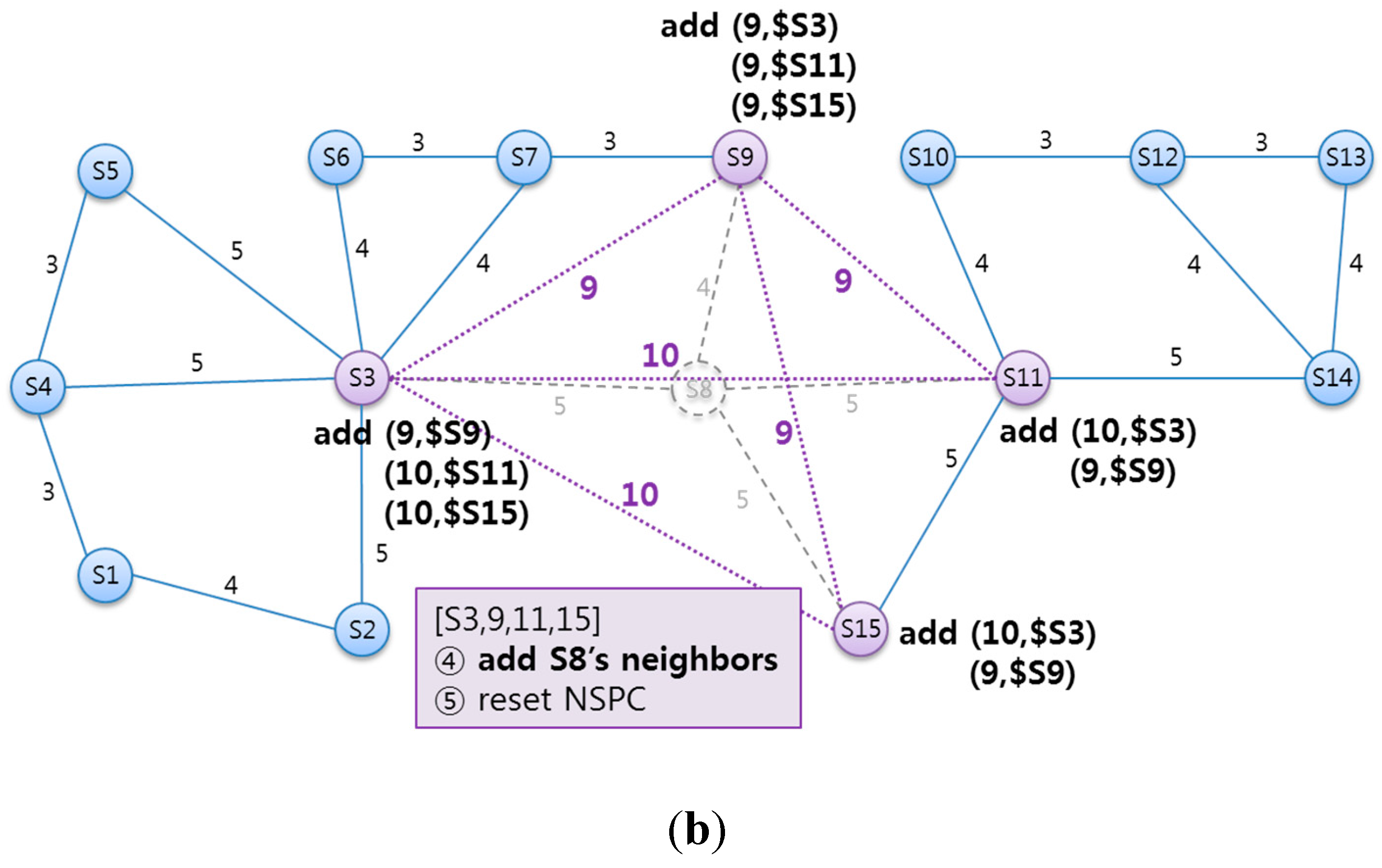
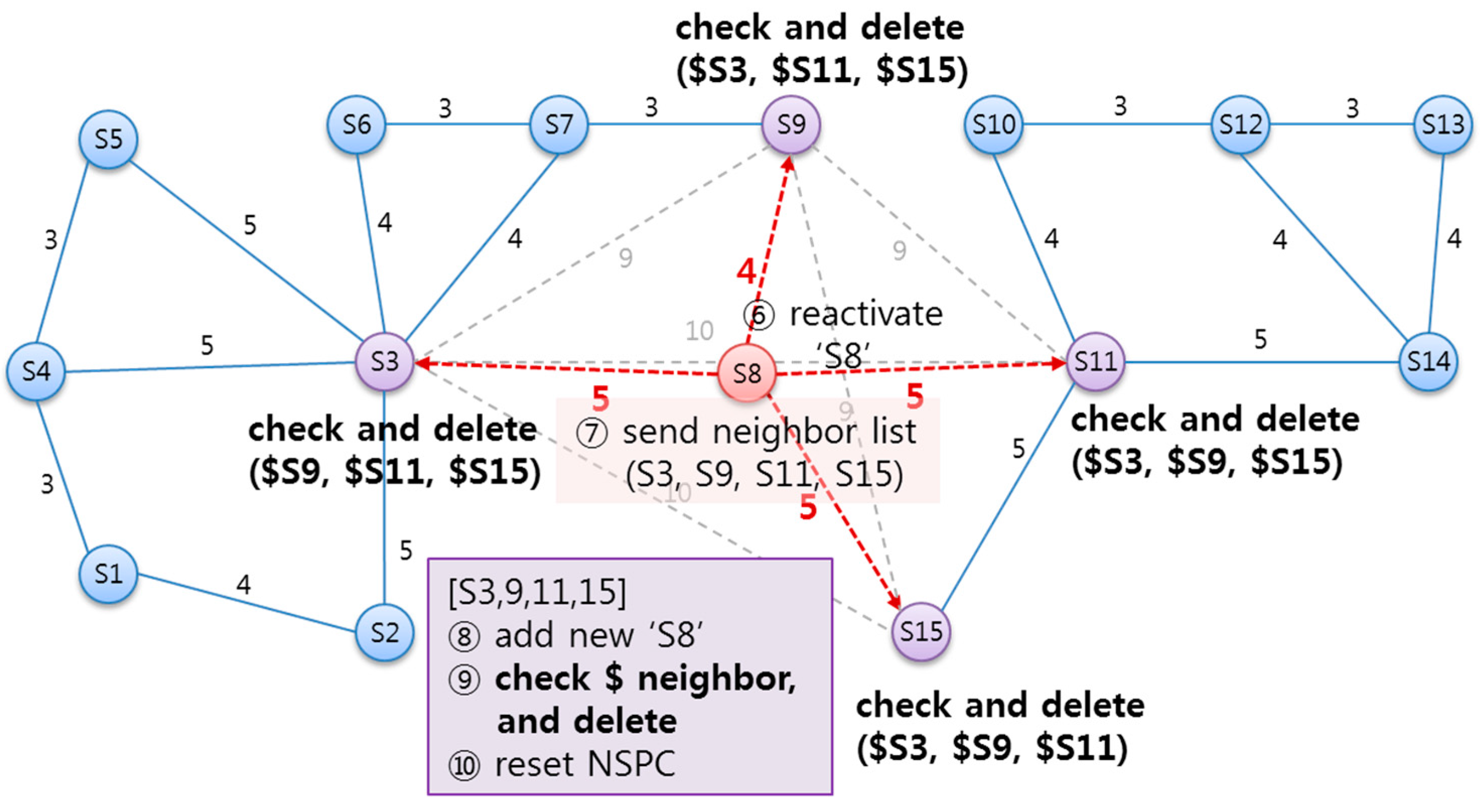
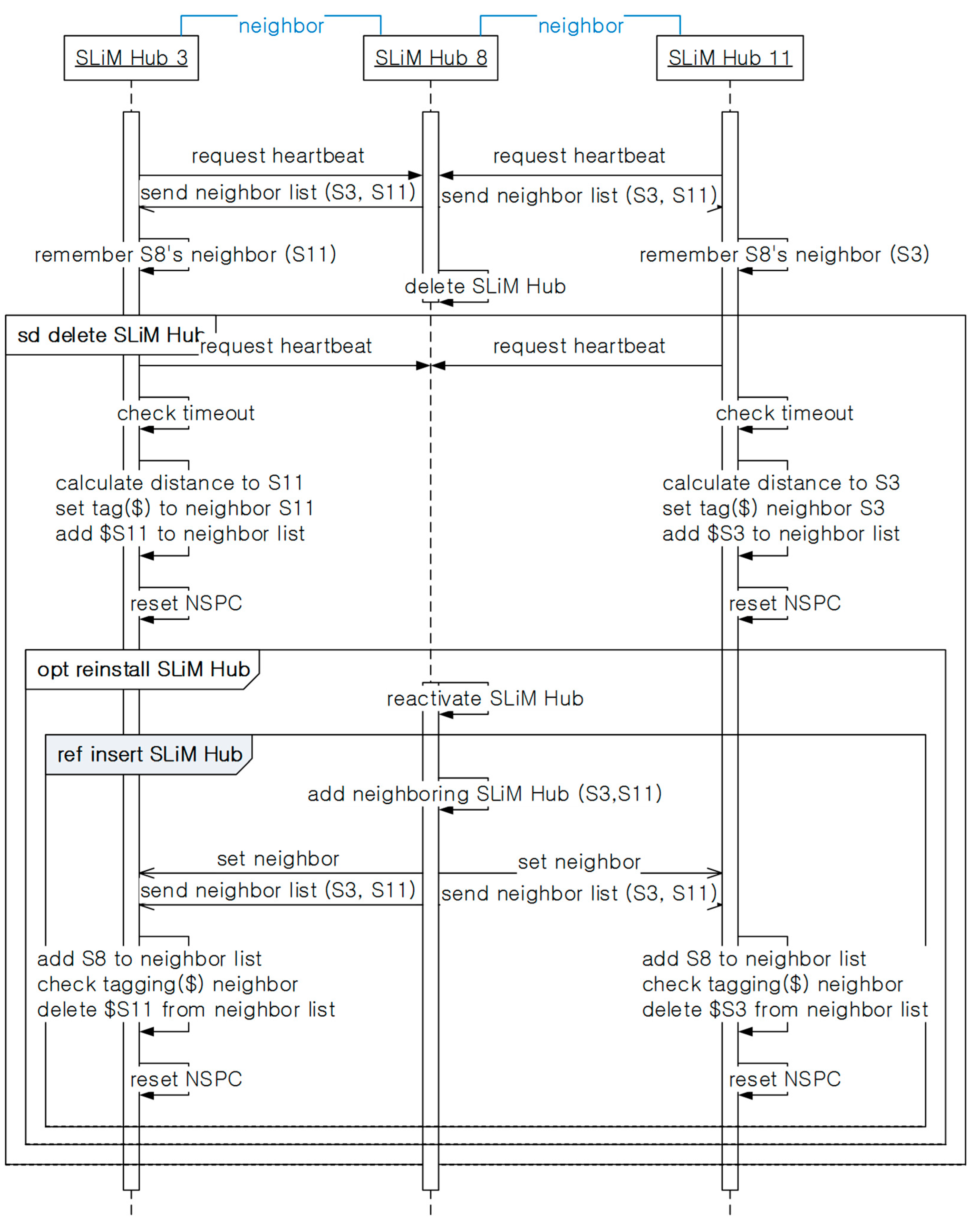
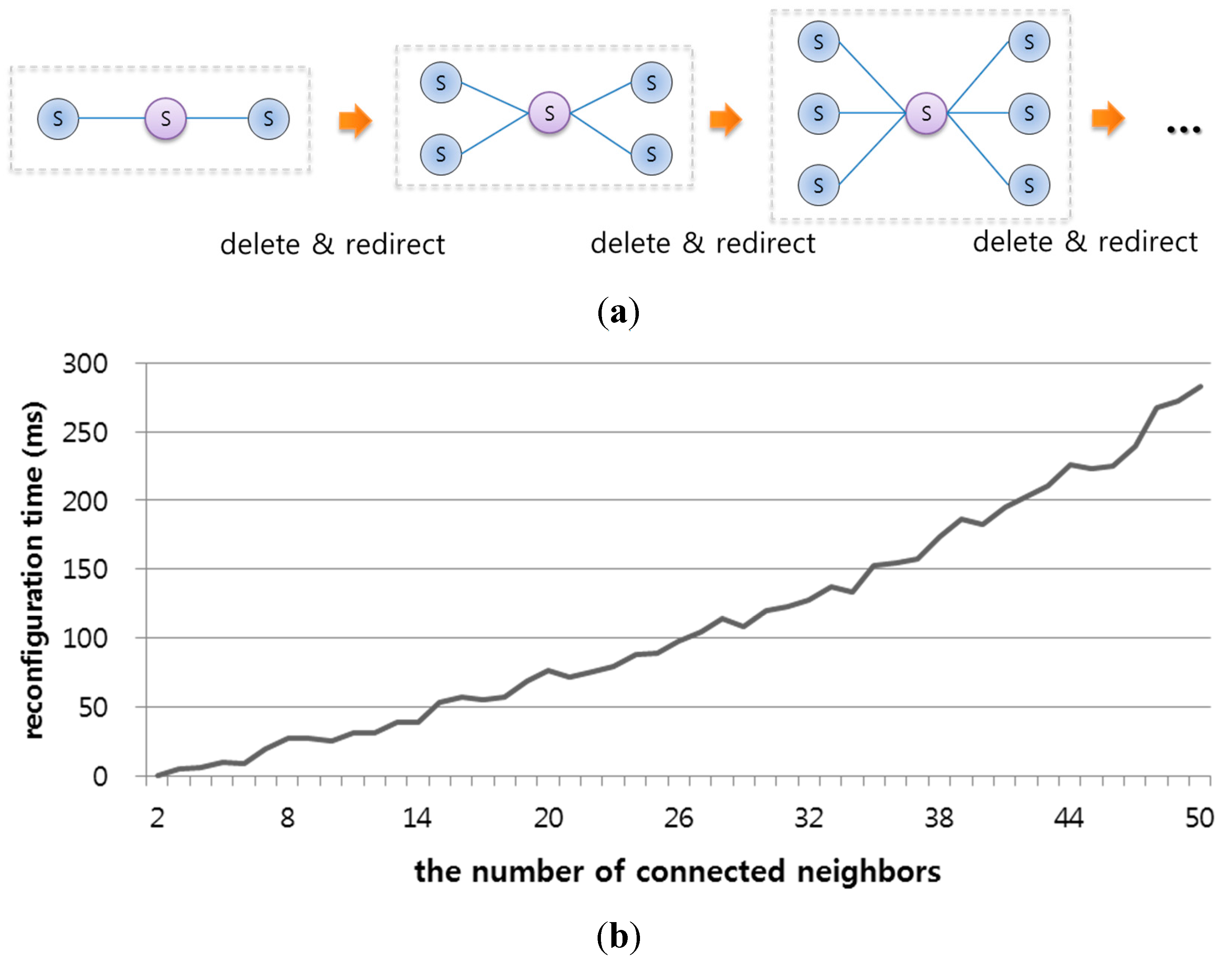
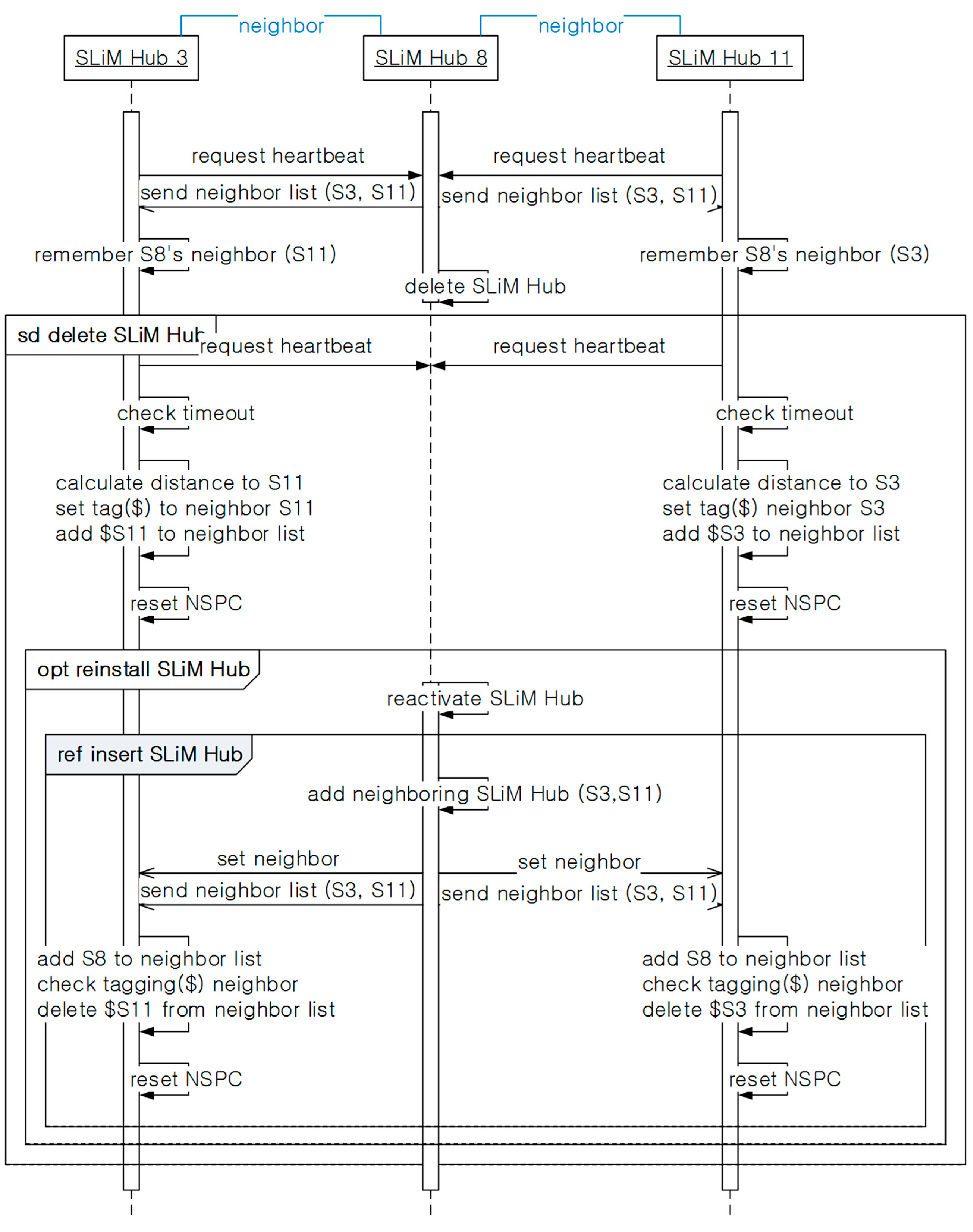
5.3.3. Deleting an Existing SLiM Hub



6. Implementation and Evaluation
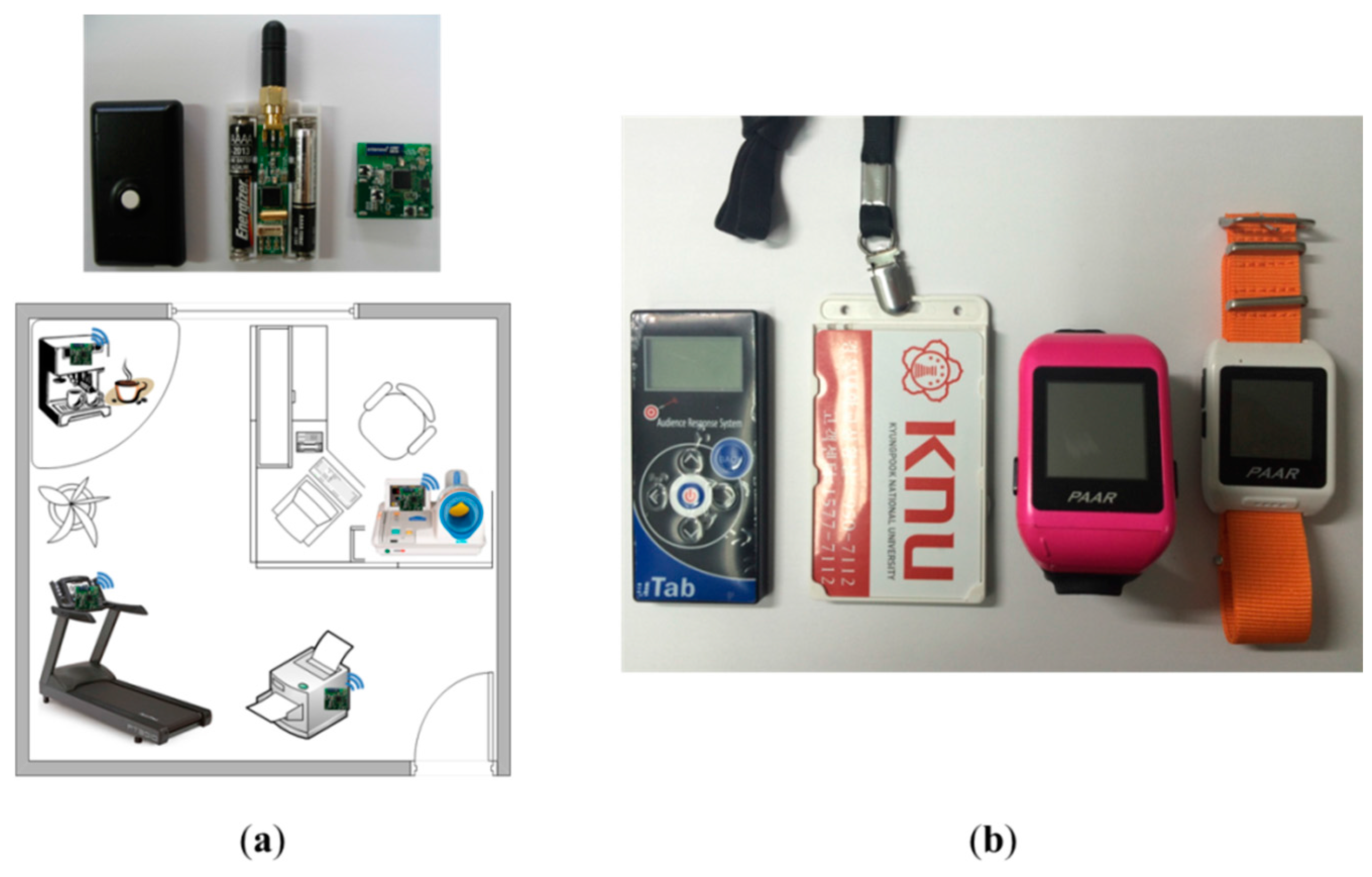
6.1. SLiM Hub and Mobile Device Hardware/Software Implementation


6.2. Dynamic Space Test and Evaluation through Simulation


7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- iBeacon for Developers. Available online: https://developer.apple.com/ibeacon/ (accessed on 18 March 2015).
- Mao, G.; Fidan, B.; Anderson, B. Wireless sensor network localization techniques. Comput. Netw. 2007, 51, 2529–2553. [Google Scholar] [CrossRef]
- Wi-Fi Location-Based Services 4.1 Design Guide. Available online: http://www.cisco.com/c/en/us/td/docs/solutions/Enterprise/Mobility/WiFiLBS-DG.pdf (accessed on 18 March 2015).
- Park, J.G.; Charrow, B.; Curtis, D.; Battat, J.; Minkov, E.; Hicks, J. Growing an Organic Indoor Location System. In Proceedings of the 8th International Conference on Mobile Systems, Applications, and Services, San Francisco, CA, USA, 15 June 2010; pp. 271–284.
- Kjærgaard, M.B. Indoor location fingerprinting with heterogeneous clients. Pervasive Mob. Comput. 2010, 7, 31–43. [Google Scholar] [CrossRef]
- Jeong, S.Y.; Jo, H.G.; Kang, S.J. Fully Distributed Monitoring Architecture Supporting Multiple Trackees and Trackers in Indoor Mobile Asset Management Application. Sensors 2014, 14, 5702–5724. [Google Scholar] [CrossRef] [PubMed]
- Lua, E.K.; Crowcroft, J.; Pias, M.; Sharma, R.; Lim, S. A Survey and Comparison of Peer-to-Peer Overlay Network Schemes. IEEE Commun. Surv. Tutor. 2005, 7, 72–93. [Google Scholar]
- Greßmann, B.; Klimek, H.; Turau, V. Towards Ubiquitous Indoor Location Based Services and Indoor Navigation. In Proceedings of the 7th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 11 March 2010; pp. 107–112.
- Ficco, M.; Pietrantuono, R.; Russo, S. Supporting ubiquitous location information in interworking 3G and wireless networks. Commun. ACM 2010, 53, 116–123. [Google Scholar] [CrossRef]
- Gedik, B.; Liu, L. MobiEyes: A Distributed Location Monitoring Service Using Moving Location Queries. IEEE Trans. Mob. Comput. 2006, 5, 1384–1402. [Google Scholar] [CrossRef]
- Cools, S.B.; Gershenson, C.; D’Hooghe, B. Self-Organizing Traffic Lights: A Realistic Simulation. In Advances in Applied Self-Organizing Systems; Springer London: London, UK, 2008; pp. 41–50. [Google Scholar]
- Dubois, D.J.; Bando, Y.; Watanabe, K.; Holtzman, H. Lightweight Self-organizing Reconfiguration of Opportunistic Infrastructure-mode WiFi Networks. In Proceedings of the 7th IEEE International Conference on Self-Adaptive and Self-Organizing Systems, Philadelphia, PA, USA, 9 September 2013; pp. 247–256.
- Dorigo, M.; Stützle, T. Ant colony optimization: Overview and recent advances. In Handbook of Metaheuristics; Springer US: New York, NY, USA, 2010; pp. 227–263. [Google Scholar]
- Di Caro, G.; Dorigo, M. AntNet: Distributed stigmergetic control for communications networks. J. Artif. Intell. Res. 1998, 9, 317–365. [Google Scholar]
- Donati, A.V.; Montemanni, R.; Casagrande, N.; Rizzoli, A.E.; Gambardella, L.M. Time dependent vehicle routing problem with a multi ant colony system. Eur. J. Oper. Res. 2008, 185, 1174–1191. [Google Scholar] [CrossRef]
- Garcia, M.P.; Montiel, O.; Castillo, O.; Sepúlveda, R.; Melin, P. Path planning for autonomous mobile robot navigation with ant colony optimization and fuzzy cost function evaluation. Appl. Soft Comput. 2009, 9, 1102–1110. [Google Scholar] [CrossRef]
- Robinson, R.; Indulska, J. A Complex Systems Approach to Service Discovery. In Proceedings of the 15th IEEE International Workshop on Database and Expert Systems Applications, Zaragoza, Spain, 30 August 2004; pp. 657–661.
- Zheng, X.; Wu, Q. Exploring Bio-inspired Algorithm for Service Discovery in Pervasive Environments. In Proceedings of the 3rd IEEE International Conference on Computer Science and Information Technology (ICCSIT), Chengdu, China, 9 July 2010; pp. 486–490.
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Lee, D.K.; Kim, T.H.; Jeong, S.Y.; Kang, S.J. A three-tier middleware architecture supporting bidirectional location tracking of numerous mobile nodes under legacy WSN environment. J. Syst. Archit. 2011, 57, 735–748. [Google Scholar] [CrossRef]
- Kim, T.H.; Jo, H.G.; Lee, J.S.; Kang, S.J. A Mobile Asset Tracking System Architecture under Mobile-Stationary Co-Existing WSNs. Sensors 2012, 12, 17446–17462. [Google Scholar] [CrossRef] [PubMed]
- Jeong, S.Y.; Jo, H.G.; Kang, S.J. A Dynamic Service Lookup and Discovery Scheme using a Self-Organizing Overlay Network for Indoor Location-Based Service. In Proceedings of the 1st International Workshop on Real-Time and Distributed Computing in Emerging Applications (REACTION 2012 co-located with IEEE RTSS), San Juan, Puerto Rico, 4 December 2012; pp. 15–20.
- Jo, H.G.; Jeong, S.Y.; Kang, S.J. Dynamic resource look-up and discovery architecture for indoor location-based service. In Proceedings of the Fourth ACM Workshop on Embedded Sensing Systems for Energy-Efficiency in Buildings, Toronto, ON, Canada, 6 November 2012; pp. 207–208.
- Welcome to ZeroC, the Home of Ice. Available online: https://zeroc.com/ (accessed on 18 March 2015).
- Jo, H.G.; Jeong, S.Y.; Kang, S.J. Actual Travel Path Based Room Connectivity Graph Generation. In Proceedings of the 15th IEEE Computational Intelligence, Communication Systems and Networks (CICSyN), Madrid, Spain, 5 June 2013; pp. 73–76.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, S.Y.; Jo, H.G.; Kang, S.J. Self-Organizing Distributed Architecture Supporting Dynamic Space Expanding and Reducing in Indoor LBS Environment. Sensors 2015, 15, 12156-12179. https://doi.org/10.3390/s150612156
Jeong SY, Jo HG, Kang SJ. Self-Organizing Distributed Architecture Supporting Dynamic Space Expanding and Reducing in Indoor LBS Environment. Sensors. 2015; 15(6):12156-12179. https://doi.org/10.3390/s150612156
Chicago/Turabian StyleJeong, Seol Young, Hyeong Gon Jo, and Soon Ju Kang. 2015. "Self-Organizing Distributed Architecture Supporting Dynamic Space Expanding and Reducing in Indoor LBS Environment" Sensors 15, no. 6: 12156-12179. https://doi.org/10.3390/s150612156
APA StyleJeong, S. Y., Jo, H. G., & Kang, S. J. (2015). Self-Organizing Distributed Architecture Supporting Dynamic Space Expanding and Reducing in Indoor LBS Environment. Sensors, 15(6), 12156-12179. https://doi.org/10.3390/s150612156