
Real-Time Impact Visualization Inspection of Aerospace Composite Structures with Distributed Sensors

Abstract
:1. Introduction
2. Method of Approach
2.1. Signal Data Preprocessing
- (1)
- Temporal sensor signals with random noises are decomposed by real-time EMD;
- (2)
- From the scales with the valuable information, the first five useful scales (such as 1st, 2nd, 3rd, 4th, 5th scales) are extracted normally, and then choose an appropriate threshold at every scale and remove the interfering noises using Equation (1), defined as:where is the threshold which will be determined by a kurtosis-based approach individually for every scale and is given by , Z is the IMF coefficient of a scale, is the kurtosis of the decomposed components, , , and will be specified according to the value in each scale.
![Sensors 15 16536 i001]()



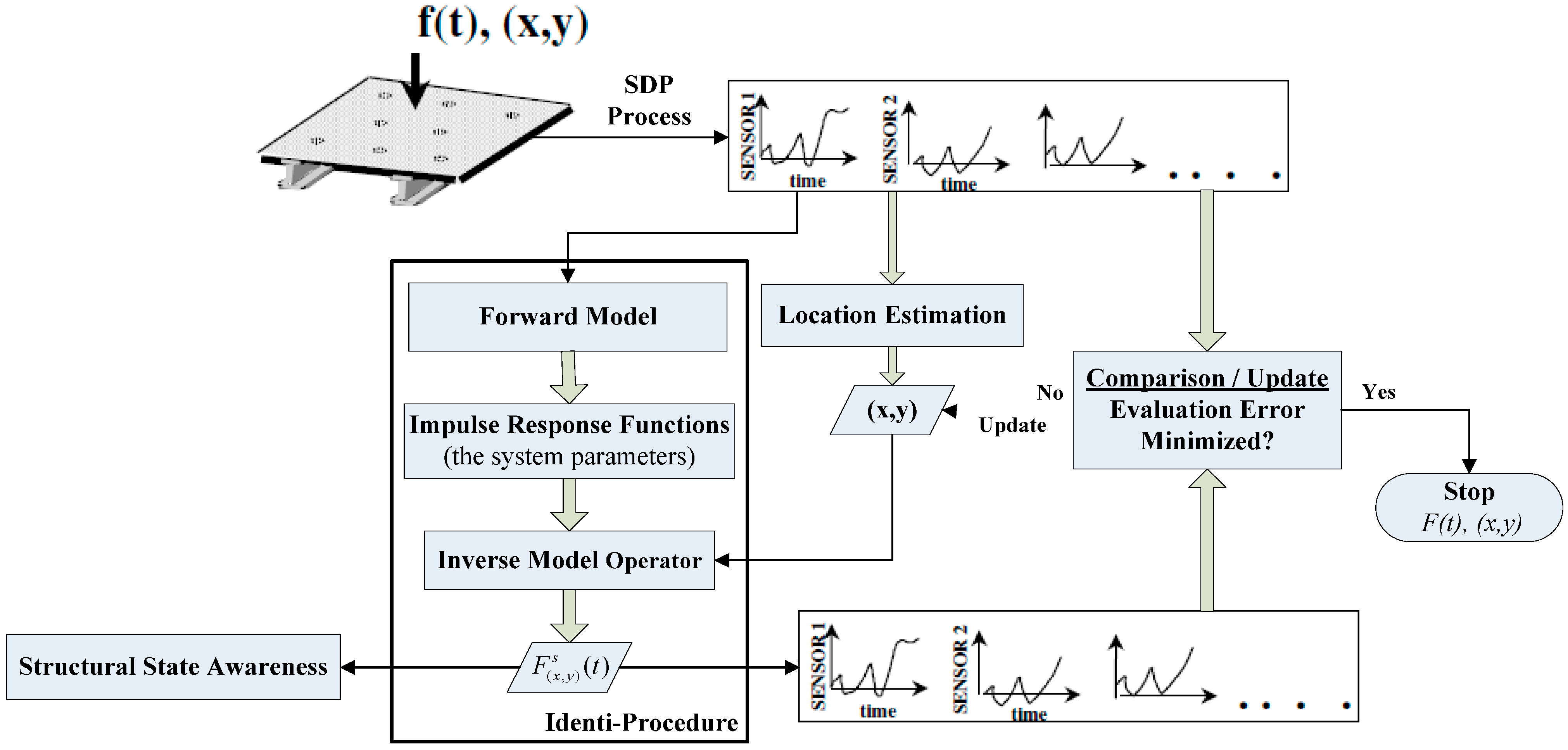
2.2. Impact Identification Procedure
2.2.1. Forward Model
- (1)
- Determination of the forward system model structure;
- (2)
- The optimal model order selection based on prediction error minimization (PEM);
- (3)
- Generation of the optimal parameters () of the model structure and formation of impulse response function matrices.
Fast Genetic Algorithm Parameter Estimation Assisted Impulse Response Function Matrices Generator

2.2.2. Inverse Model Operator


2.3. Impact Positioning Calculation
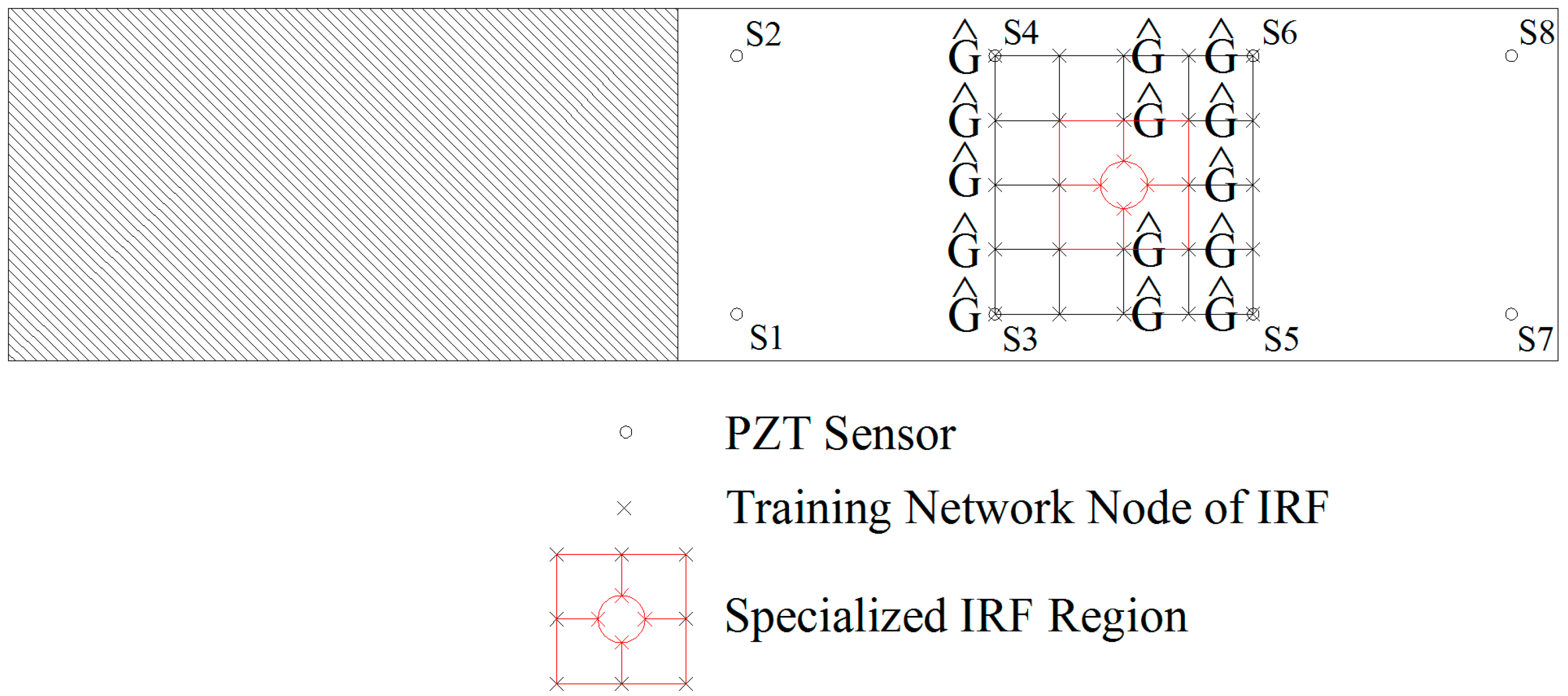
2.3.1. Extraction of Impact Region
2.3.2. Locating Impact Coordinates


3. Experimental Details and Procedure
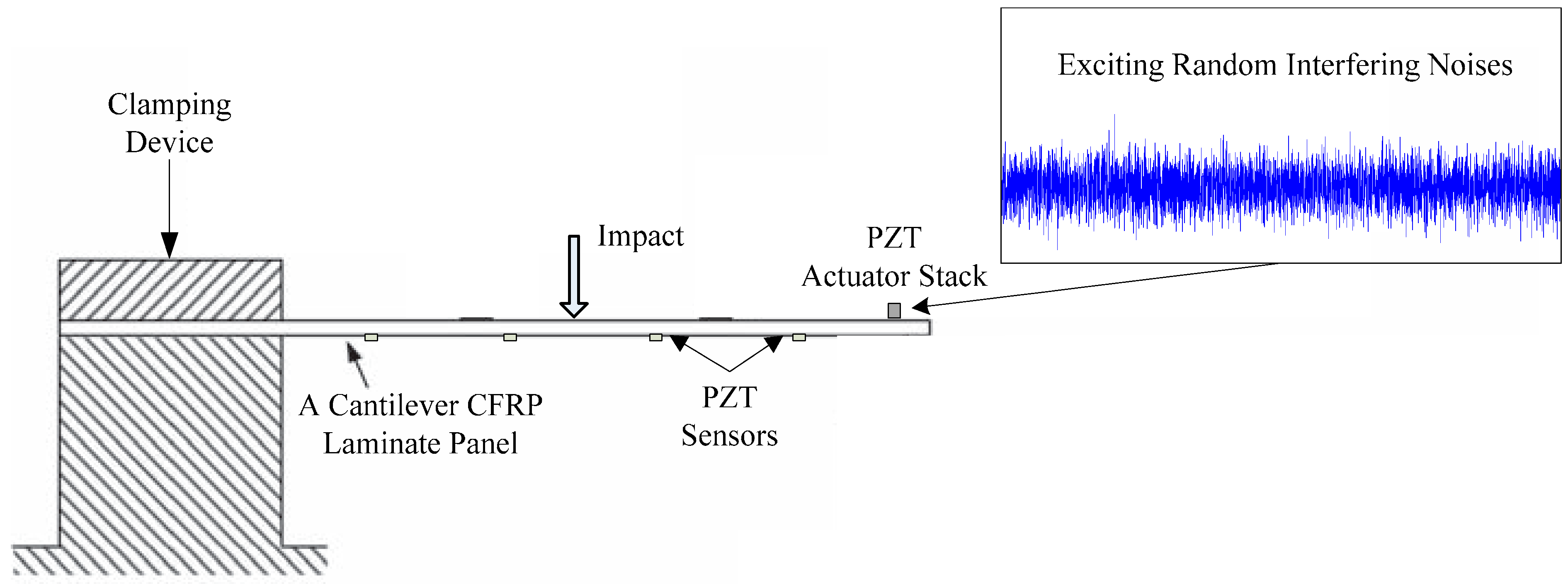
3.1. Experimental Specimens

3.2. Experimental Setup

3.3. Impact Tests


4. Results and Discussion
4.1. Impact Positioning and Error Evaluations



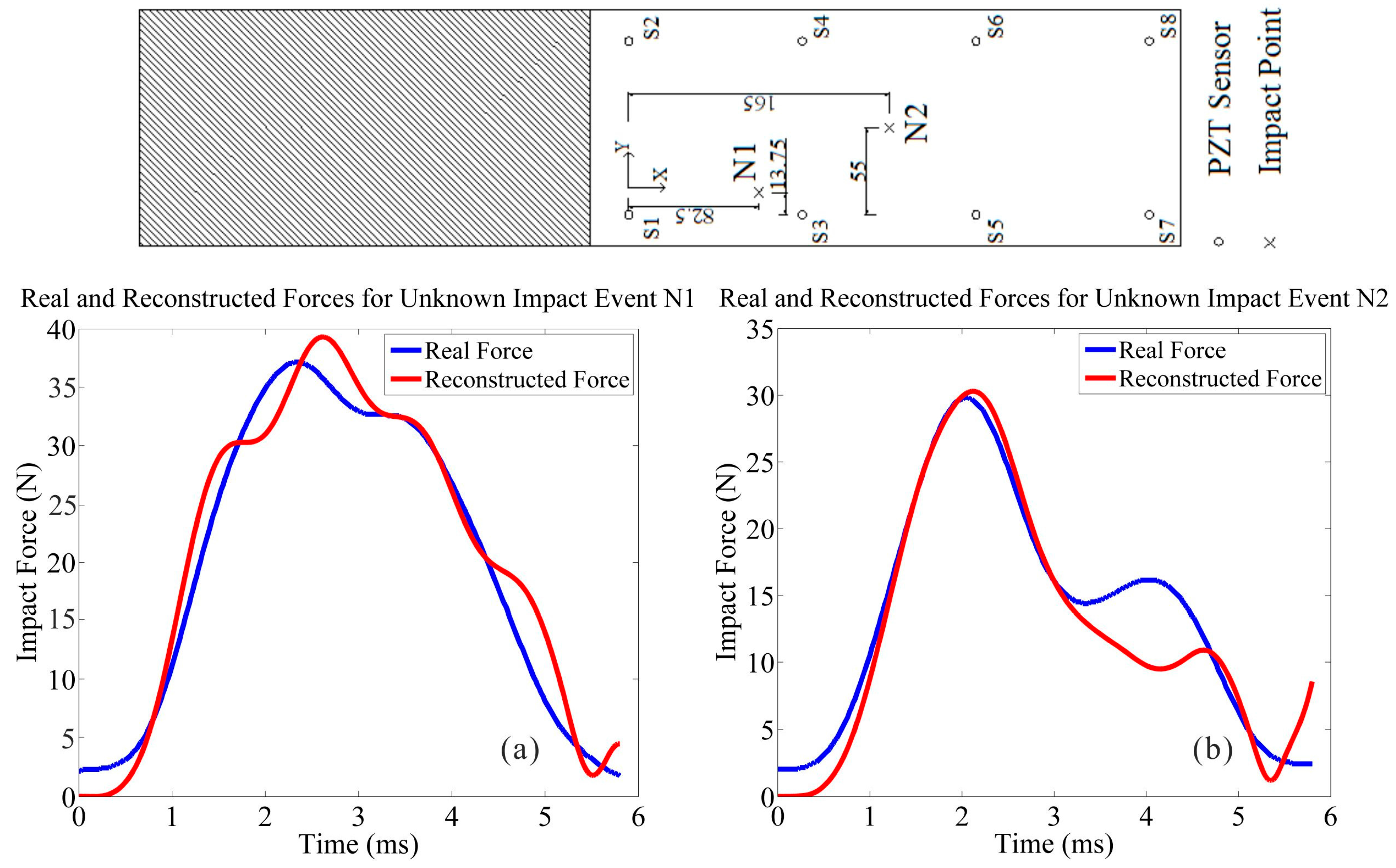
4.2. Impact Identifications



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Impact Events | Real | Estimations by Denoising | Estimations within Noises | |
|---|---|---|---|---|
| SNR15 | Maximum amplitude (Unit: N) | 43.28 | 44.35 | 49.62 |
| Impulse (Unit: N s) | 0.0925 | 0.1089 | 0.1295 | |
| SNR10 | Maximum amplitude (Unit: N) | 18.84 | 18.38 | 23.83 |
| Impulse (Unit: N s) | 0.0616 | 0.0543 | 0.0893 | |
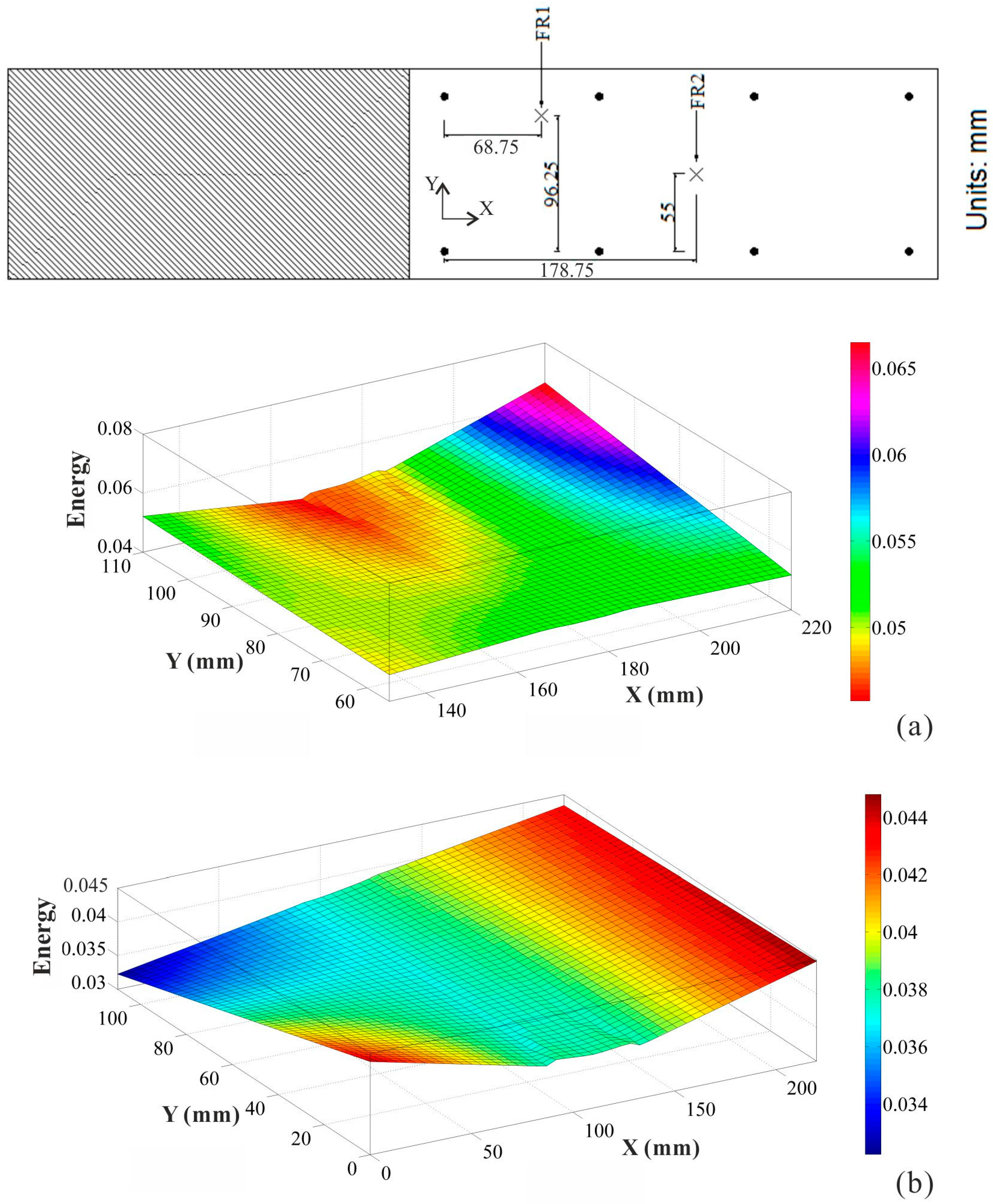
4.3. Structural State Awareness

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kamsu-Foguem, B. Knowledge-based support in Non-Destructive Testing for health monitoring of aircraft structures. Adv. Eng. Inform. 2012, 26, 859–869. [Google Scholar] [CrossRef]
- Zhang, C.; Qiu, J.; Ji, H.; Shan, S. An imaging method for impact localization using metal-core piezoelectric fiber rosettes. J. Intell. Mater. Syst. Struct. 2014. [Google Scholar] [CrossRef]
- Moon, Y.; Lee, S.; Shin, K.; Lee, Y. Identification of Multiple Impacts on a Plate Using the Time-Frequency Analysis and the Kalman Filter. J. Intell. Mater. Syst. Struct. 2011, 22, 1283–1291. [Google Scholar] [CrossRef]
- Worden, K.; Staszewski, W. Impact location and quantification on a composite panel using neural networks and a genetic algorithm. Strain 2000, 36, 61–68. [Google Scholar] [CrossRef]
- Park, J. Impact Identification in Structures Using a Sensor Network: The System Identification Approach. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2005. [Google Scholar]
- Ciampa, F.; Meo, M.; Barbieri, E. Impact localization in composite structures of arbitrary cross section. Struct. Health Monit. 2012, 11, 643–655. [Google Scholar] [CrossRef] [Green Version]
- Guyomar, D.; Lallart, M.; Monnier, T.; Wang, X.-J.; Petit, L. Passive impact location estimation using piezoelectric sensors. Struct. Health Monit. 2009, 8, 357–367. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S.; Mei, H.; Qian, W. Digital sequences and a time reversal-based impact region imaging and localization method. Sensors 2013, 13, 13356–13381. [Google Scholar] [CrossRef] [PubMed]
- Qiu, L.; Yuan, S.; Zhang, X.; Wang, Y. A time reversal focusing based impact imaging method and its evaluation on complex composite structures. Smart Mater. Struct. 2011, 20, 105014. [Google Scholar] [CrossRef]
- Hiche, C.; Coelho, C.K.; Chattopadhyay, A. A strain amplitude-based algorithm for impact localization on composite laminates. J. Intell. Mater. Syst. Struct. 2011, 22, 2061–2067. [Google Scholar] [CrossRef]
- Ghajari, M.; Sharif-Khodaei, Z.; Aliabadi, M.H.; Apicella, A. Identification of impact force for smart composite stiffened panels. Smart Mater. Struct. 2013, 22, 085014. [Google Scholar] [CrossRef]
- Lee, M.; Chiu, W.; Koss, L. A numerical study into the reconstruction of impact forces on railway track-like structures. Struct. Health Monit. 2005, 4, 19–45. [Google Scholar] [CrossRef]
- Park, C.Y.; Kim, I.-G. Prediction of impact forces on an aircraft composite wing. J. Intell. Mater. Syst. Struct. 2008, 19, 319–324. [Google Scholar] [CrossRef]
- Seydel, R.; Chang, F.-K. Impact identification of stiffened composite panels: I. System development. Smart Mater. Struct. 2001, 10, 354. [Google Scholar] [CrossRef]
- Seydel, R.; Chang, F.-K. Impact identification of stiffened composite panels: II. Implementation studies. Smart Mater. Struct. 2001, 10, 370. [Google Scholar] [CrossRef]
- Peelamedu, S.M.; Naganathan, N.G.; Dukkipati, R.V.; Srinivas, J. Impact identification for a metallic plate using distributed smart materials. Smart Mater. Struct. 2005, 14, 449. [Google Scholar] [CrossRef]
- Ahmari, S.; Yang, M. Impact location and load identification through inverse analysis with bounded uncertain measurements. Smart Mater. Struct. 2013, 22, 085024. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, S.S. Hilbert-Huang Transform and Its Applications; World Scientific Publishing: Singapore, 2005; Volume 5. [Google Scholar]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inform. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef]
- Donoho, D.L.; Johnstone, J.M. Ideal spatial adaptation by wavelet shrinkage. Biometrika 1994, 81, 425–455. [Google Scholar] [CrossRef]
- Goldberg, D. Genetic Algorithms in Search, Optimization, and Machine Learning; Addison-Wesley: Reading, MA, USA, 1990. [Google Scholar]
- Si, L.; Baier, H. An Advanced Ensemble Impact Monitoring and Identification Technique for Aerospace Composite Cantilever Structures. In Proceedings of the 7th European Workshop on Structural Health Monitoring (EWSHM), Nantes, France, 8–11 July 2014.
- Achenbach, J. Wave Propagation in Elastic Solids; Elsevier: Amsterdam, The Netherland, 1984. [Google Scholar]
- Jones, R.M. Mechanics of Composite Materials; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Si, L.; Baier, H. Real-Time Impact Visualization Inspection of Aerospace Composite Structures with Distributed Sensors. Sensors 2015, 15, 16536-16556. https://doi.org/10.3390/s150716536
Si L, Baier H. Real-Time Impact Visualization Inspection of Aerospace Composite Structures with Distributed Sensors. Sensors. 2015; 15(7):16536-16556. https://doi.org/10.3390/s150716536
Chicago/Turabian StyleSi, Liang, and Horst Baier. 2015. "Real-Time Impact Visualization Inspection of Aerospace Composite Structures with Distributed Sensors" Sensors 15, no. 7: 16536-16556. https://doi.org/10.3390/s150716536