3.1. Time Series under Long Pulse and Signal Processing
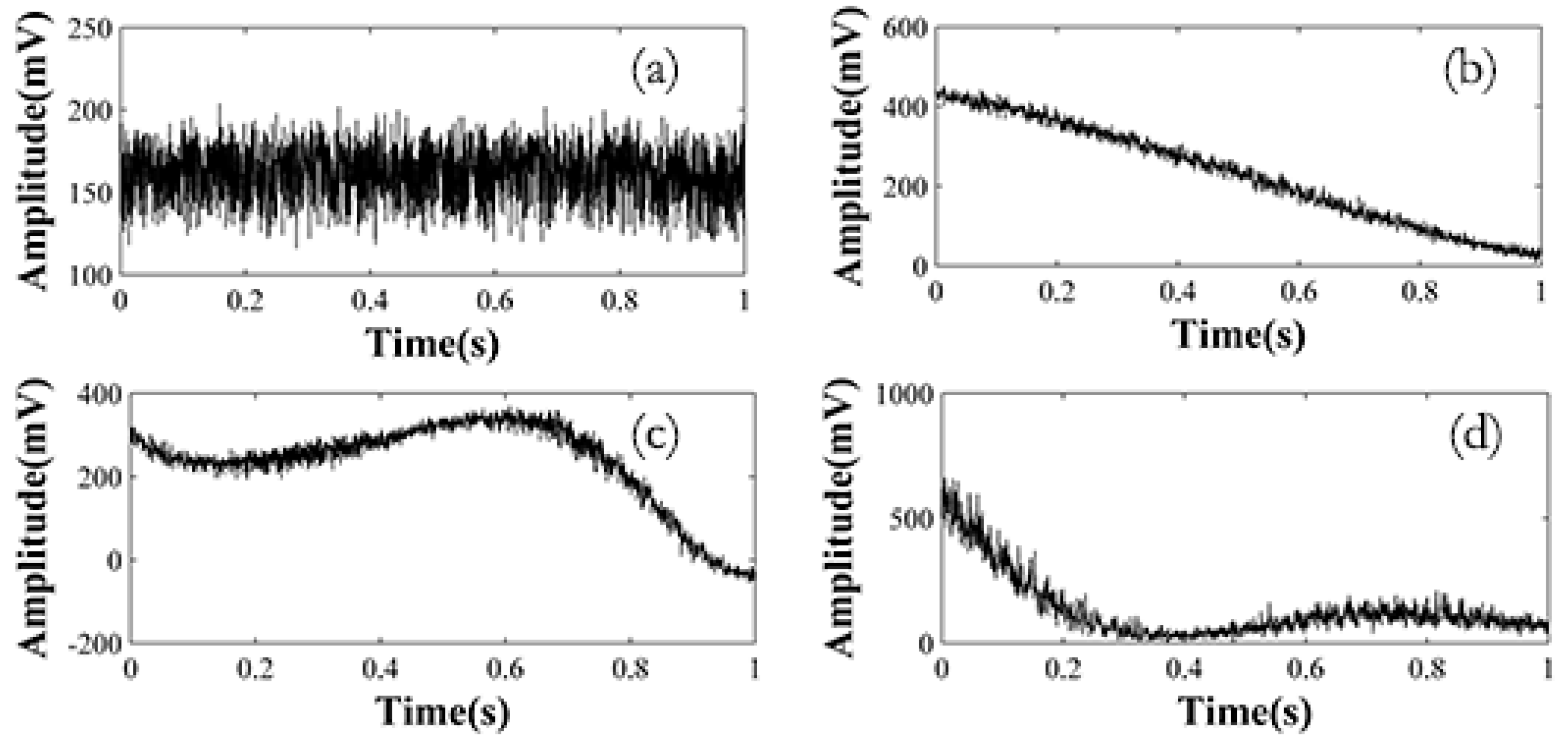
The data picked up from each Rayleigh backscattering trace with the same time delay will form the time series of the corresponding sensing point. With increasing pulse width, the coherent Rayleigh back scattering light becomes more sensitive to phase changes, and the fluctuation are more severe.
Figure 3 shows the time series under pulse widths ranging from 200 ns to 5000 ns in a quiet environment.
Figure 3.
Time series in quiet environment under different pulse widths: (a) 200 ns pulse width; (b) 1500 ns pulse width; (c) 3500 ns pulse width; (d) 5000 ns pulse width.
Figure 3.
Time series in quiet environment under different pulse widths: (a) 200 ns pulse width; (b) 1500 ns pulse width; (c) 3500 ns pulse width; (d) 5000 ns pulse width.
The time series fluctuate seriously when the pulse width is longer than 200 ns. Because every tiny perturbation within the pulse duration will lead to a fluctuation in the backscattering coherent light, the longer the pulse length is, the easier it is for the time series to be influenced. Thus traditional averaging methods are no longer suitable for the long pulse circumstance. A data processing technique combining wavelet and EMD is proposed to handle it.
The fluctuation is severer when the long pulse is used. It contains low frequencies and is easily influenced by the environmental state. If the fluctuation remains, the locating program will give false locations. In order to avoid false location feedback, we use EMD to decompose the time series into a collection of intrinsic mode functions. The decomposition is expressed as Equation (12).
is the
ith intrinsic mode function (IMF) of original signal, which represents the local characteristic signal at different time scales of the original signal, and
is the residual error, which represents the global trend of the original signal. Through setting a suitable stopping threshold of EMD process, the fluctuation is preserved in the residual part (
). Then we can remove the fluctuation and recompose the time series by summating the intrinsic mode functions (
) [
10]:
The main noise of detector is the shot noise, which can be expressed as:
where
S is a coefficient based on the detector type (for a photovoltaic device
S = 4),
is the electron charge,
is the dark current of the detector,
is the current of the background light,
is the current of the signal light,
M is the detector gain and
B is the frequency band of the detector [
11]. The shot noise comes from the background light, signal light and the electronic noise. With the increase of the pulse width, the amplitude of shot noise becomes larger, and it changes with the time series’ fluctuation. When the amplitude of the backscattering light is at a coherent strength state, the amplitude of shot noise is also at a high level. This makes the shot noise difficult to filter by traditional averaging methods or by traditional filtering methods. In order to decrease the time-dependent shot noise, the wavelet denoising method is applied. The wavelet decomposition is expressed as Equation (14):
is the wavelet reconstruction coefficient of high frequency component obtained by the wavelet decomposition of the
ith layer and
is the reconstruction wavelet coefficient of low frequency component of the
nth layer. Through wavelet decomposition, the time series are decomposed into different frequency bands. Then the filter threshold will be set according to the shot noise level in each band, respectively [
12]. Through removing the shot noise component in each frequency band respectively, the shot noise can be decreased significantly.
The whole data process is described as follows: firstly, the time series are sent to a wavelet denoising program to reduce the short noise. Secondly, the denoised time series are sent to an EMD program to remove the fluctuation. Then we use the peak-to-average ratio (PAR) of the time series to test whether there is a perturbation or not. As the PAR is dimensionless, we can ignore the optical attenuation. If there is a perturbation, the program will figure out the center of the vibration segment and then calculate the location according to Equation (11).
Figure 4 shows the performance of the data processing technique under 5000 ns pulse width conditions.
Figure 4a shows the time series before processing and the red rectangle shows the duration of the intrusion. With the serious fluctuation and shot noise, it is hard to find out the vibration segment. Without suitable data processing, it will also cause false alarms.
Figure 4b shows the data after processing. We can see that the shot noise and data fluctuation are reduced greatly both in the background part (0.5 s–0.9 s) and in the vibration part (0.2 s–0.5 s). Besides, the details of vibration are kept, which is used for the following data analysis, like event recognition.
Figure 4.
Time series before (a) and after (b) processing. The red rectangle shows the vibration duration (under 5000 ns pulse width).
Figure 4.
Time series before (a) and after (b) processing. The red rectangle shows the vibration duration (under 5000 ns pulse width).
3.2. Spatial Trace and Vibration Segment
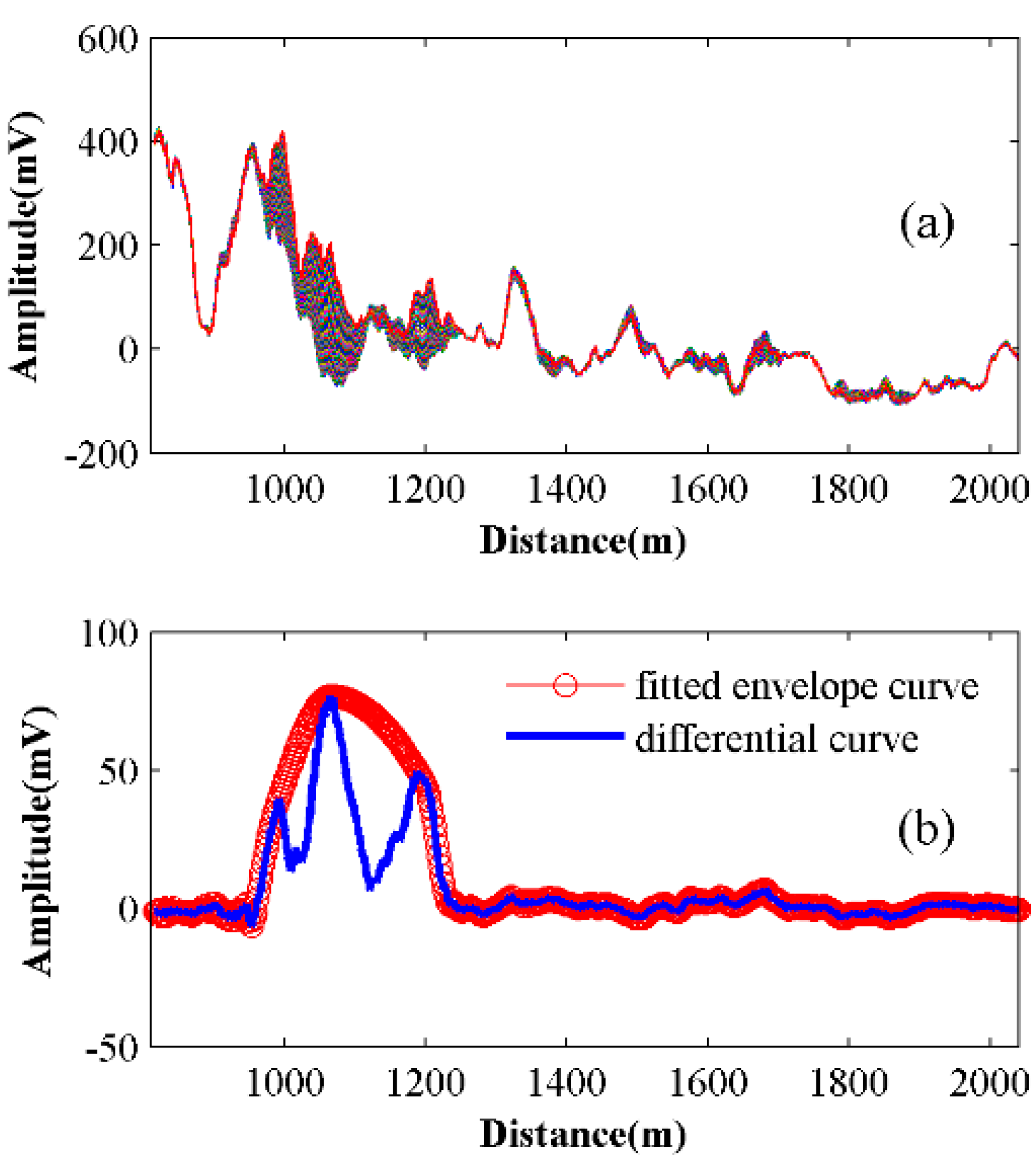
In order to show the characteristic of the spatial traces under long pulse conditions, 50 after-averaged traces, which come from 100 original Rayleigh backscattering traces with a moving average number 50, are illustrated in
Figure 5a. The pulse width is 3000 ns and the repeat rate of the pulse is 5 kHz. An artificial knock acts as the vibration source at about 970 m. As the 100 original traces only take up 0.02 s, the background fluctuation is weak and only wavelet denoising is applied. We can observe a clear amplitude change from about 970 m to 1270 m, corresponding to the artificial knock at 970 m under a 3000 ns pulse width. The blue solid line in
Figure 5b is the difference between each trace with an interval number 10. There are two valleys between 970 m and 1270 m. This is due to the destructive interference problem [
13], which leads to certain places being insensitive to vibration.
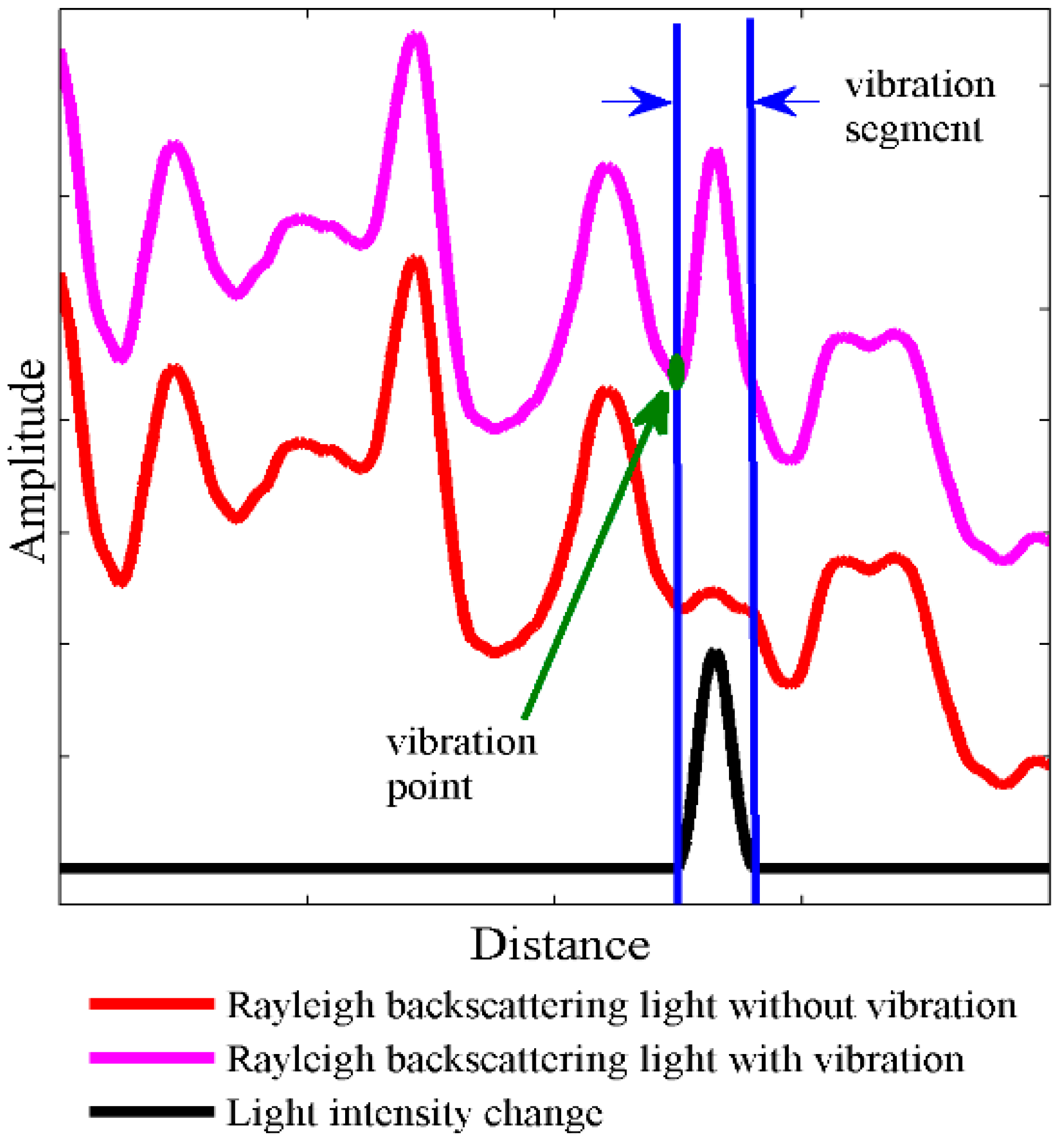
When the phase part
in Equation (10) is
, the sensor will be insensitive and the light intensity change will be small. When the phase part is
, the sensor will be sensitive and the light intensity change will be large. In order to figure out the vibration segment, the envelope fitting is applied, which is the red circular line in
Figure 5b. The fitted envelope curve shows low-sides and a high-middle shape, which matches
Figure 2. Through a threshold method, the vibration segment can be figured out.
Figure 5.
(a) Fifty after-averaged traces superimposed with amplitude change from 970 m to 1270 m. (b) Differential trace (the blue solid line) and its fitted envelope curve (the red circular line).
Figure 5.
(a) Fifty after-averaged traces superimposed with amplitude change from 970 m to 1270 m. (b) Differential trace (the blue solid line) and its fitted envelope curve (the red circular line).
3.3. Repeatability Tests under Different Pulse Widths
A piezoelectric transducer (PZT) tube is set at 970 m to act as the vibration source and a 400 Hz sinusoidal wave from a signal generator is used to drive the PZT tube. The sample frequency is 50 MHz, corresponding to 2 m spatial resolution. Different pulse widths ranging from 200 ns to 5 µs are applied and then a program calculates the location automatically. In order to figure out the vibration segment accurately, the time series of every sample point is transformed to frequency domain, and obvious value can be found at 400 Hz place.
Figure 6 shows the data under 200 ns, 1500 ns, 3500 ns and 5000 ns pulse width conditions and the start and end points of the vibration segment can be figured out through a threshold method.
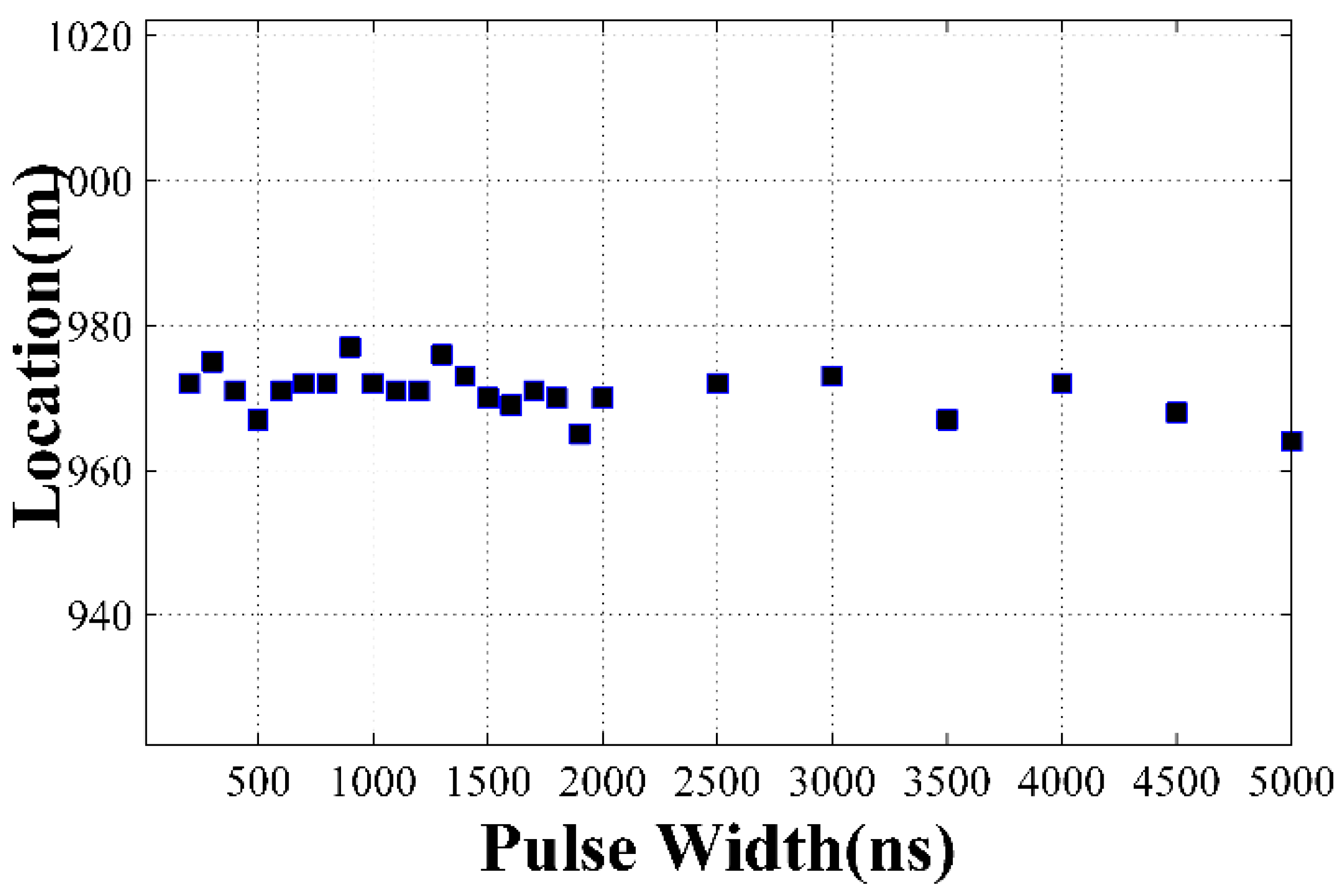
Table 2 shows the results under different pulse widths and
Figure 7 shows their relationship. The average location is 970.8 m, which is used as the true location, and the maximum error is 6.8 m, which appears under the 5000 ns pulse width.
Figure 6.
Frequency and space relationship under different pulse widths. (a) 200 ns pulse width; (b) 1500 ns pulse width; (c) 3500 ns pulse width; (d) 5000 ns pulse width.
Figure 6.
Frequency and space relationship under different pulse widths. (a) 200 ns pulse width; (b) 1500 ns pulse width; (c) 3500 ns pulse width; (d) 5000 ns pulse width.
Figure 7.
Locating results under different pulse widths.
Figure 7.
Locating results under different pulse widths.
Table 2.
Locating results under different pulse widths.
Table 2.
Locating results under different pulse widths.
| Pulse Width (ns) | Start Point (m) | End Point (m) | Location (m) |
|---|
| 200 | 970 | 994 | 972 |
| 300 | 970 | 1010 | 975 |
| 400 | 972 | 1010 | 971 |
| 500 | 968 | 1016 | 967 |
| 600 | 970 | 1032 | 971 |
| 700 | 970 | 1044 | 972 |
| 800 | 970 | 1054 | 972 |
| 900 | 972 | 1072 | 977 |
| 1000 | 970 | 1074 | 972 |
| 1100 | 972 | 1080 | 971 |
| 1200 | 968 | 1094 | 971 |
| 1300 | 976 | 1106 | 976 |
| 1400 | 974 | 1112 | 973 |
| 1500 | 970 | 1120 | 970 |
| 1600 | 970 | 1128 | 969 |
| 1700 | 970 | 1142 | 971 |
| 1800 | 970 | 1150 | 970 |
| 1900 | 968 | 1152 | 965 |
| 2000 | 972 | 1168 | 970 |
| 2500 | 972 | 1222 | 972 |
| 3000 | 972 | 1274 | 973 |
| 3500 | 970 | 1314 | 967 |
| 4000 | 972 | 1372 | 972 |
| 4500 | 970 | 1416 | 968 |
| 5000 | 970 | 1458 | 964 |
3.5. Different Perturbation Points under Long Pulse Conditions
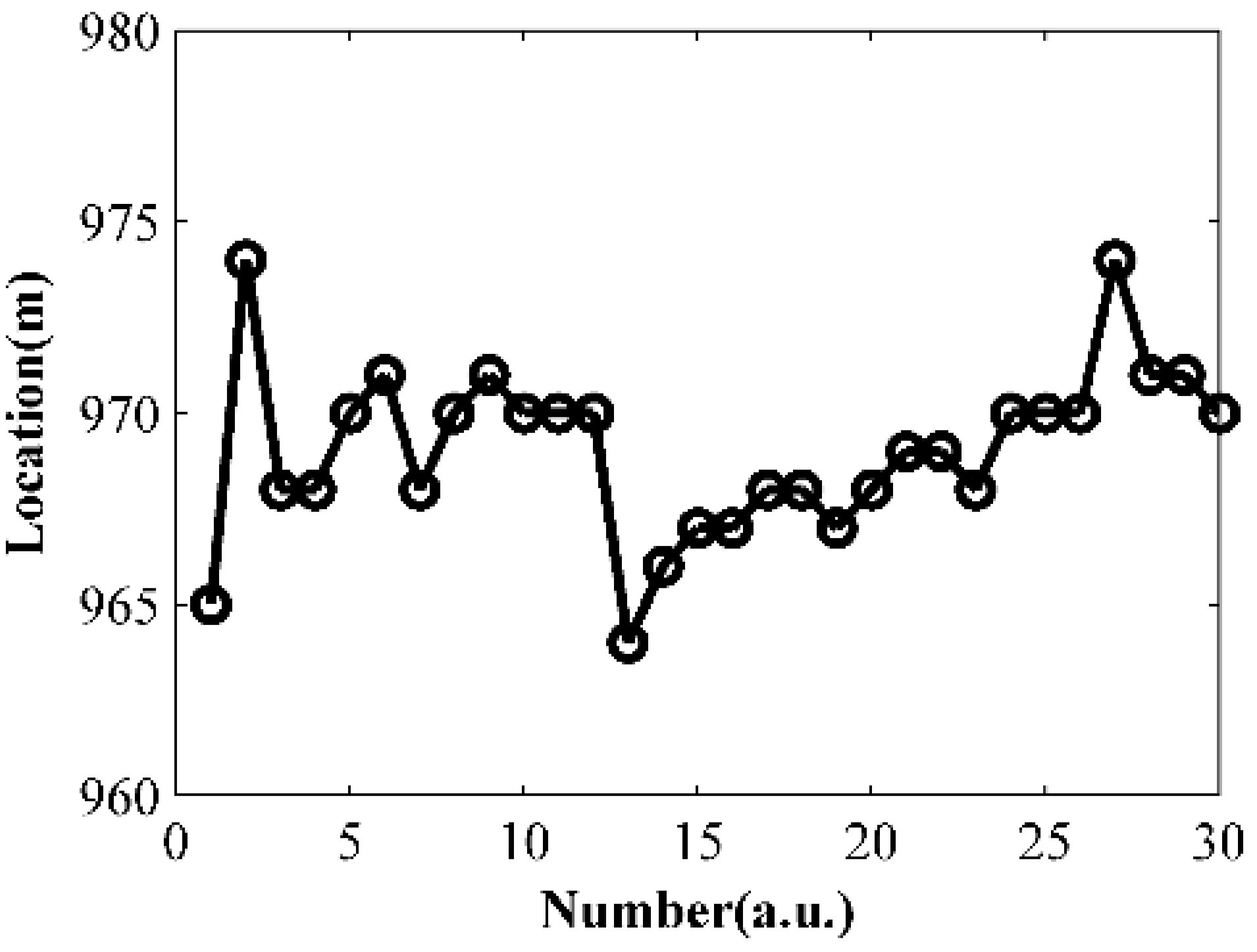
In order to test the locating consistency of the system, a test of perturbations at different places labeled from 0 m to 35 m is carried out. Here, because it is hard to obtain the accurate absolute distance on the fiber, we use the relative distance as the true value. The test results are also relative distances obtained by subtracting the location of the 0 m test point. With a 50 MHz sample frequency, the distance between each sample point is 2 m. Hence, the system can response a different perturbation with a 2 m interval theoretically.
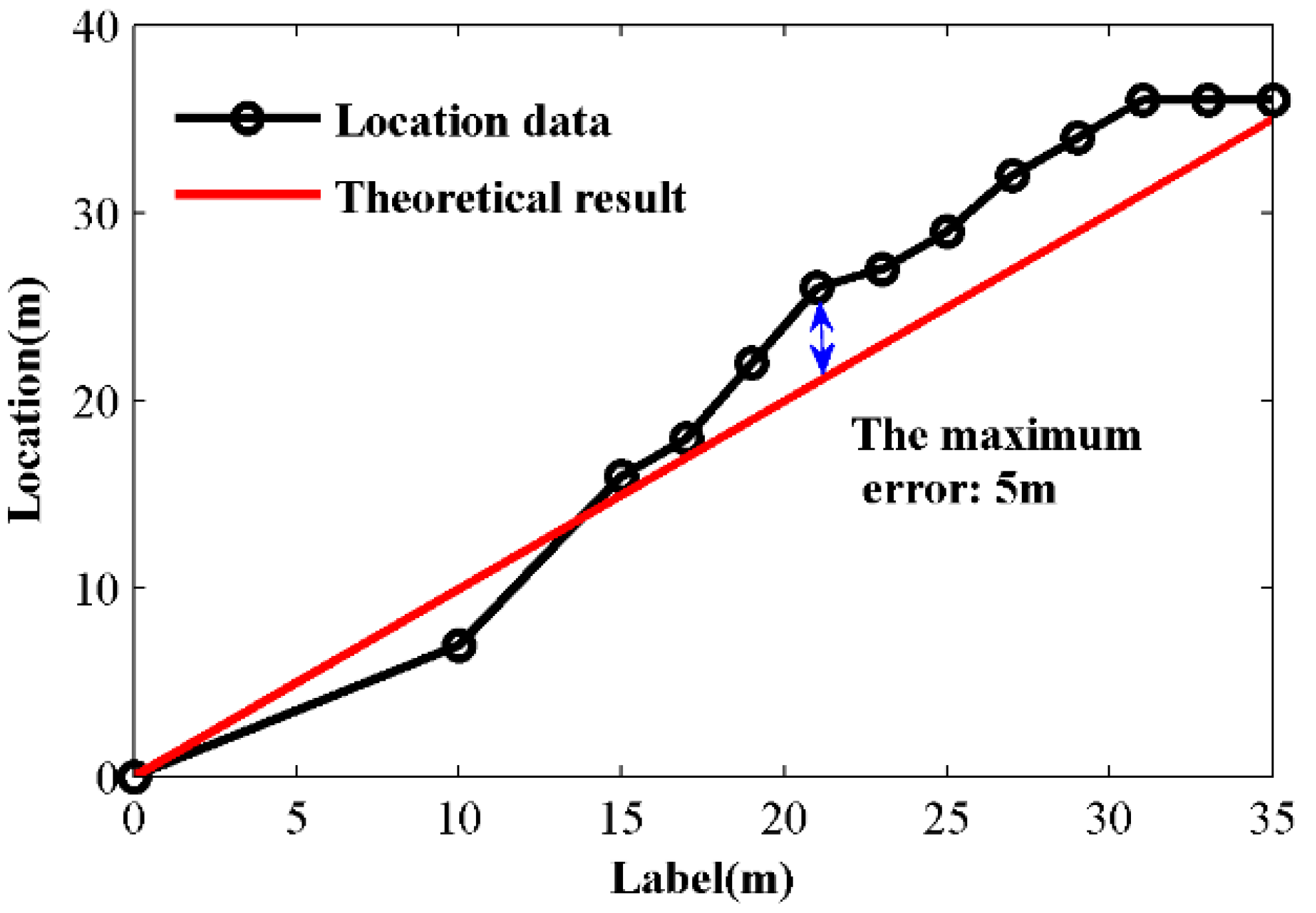
Figure 9 shows the average locating results of each perturbation point and the maximum error is 5 m, where the applied pulse width is 5 µs. Combined with the tests in
Section 3.3 and
Section 3.4, the locating accuracy of the system is 6.8 m.
Figure 9.
Average locating result under different perturbation points (the black line is the locating result and the red line is the reference line).
Figure 9.
Average locating result under different perturbation points (the black line is the locating result and the red line is the reference line).
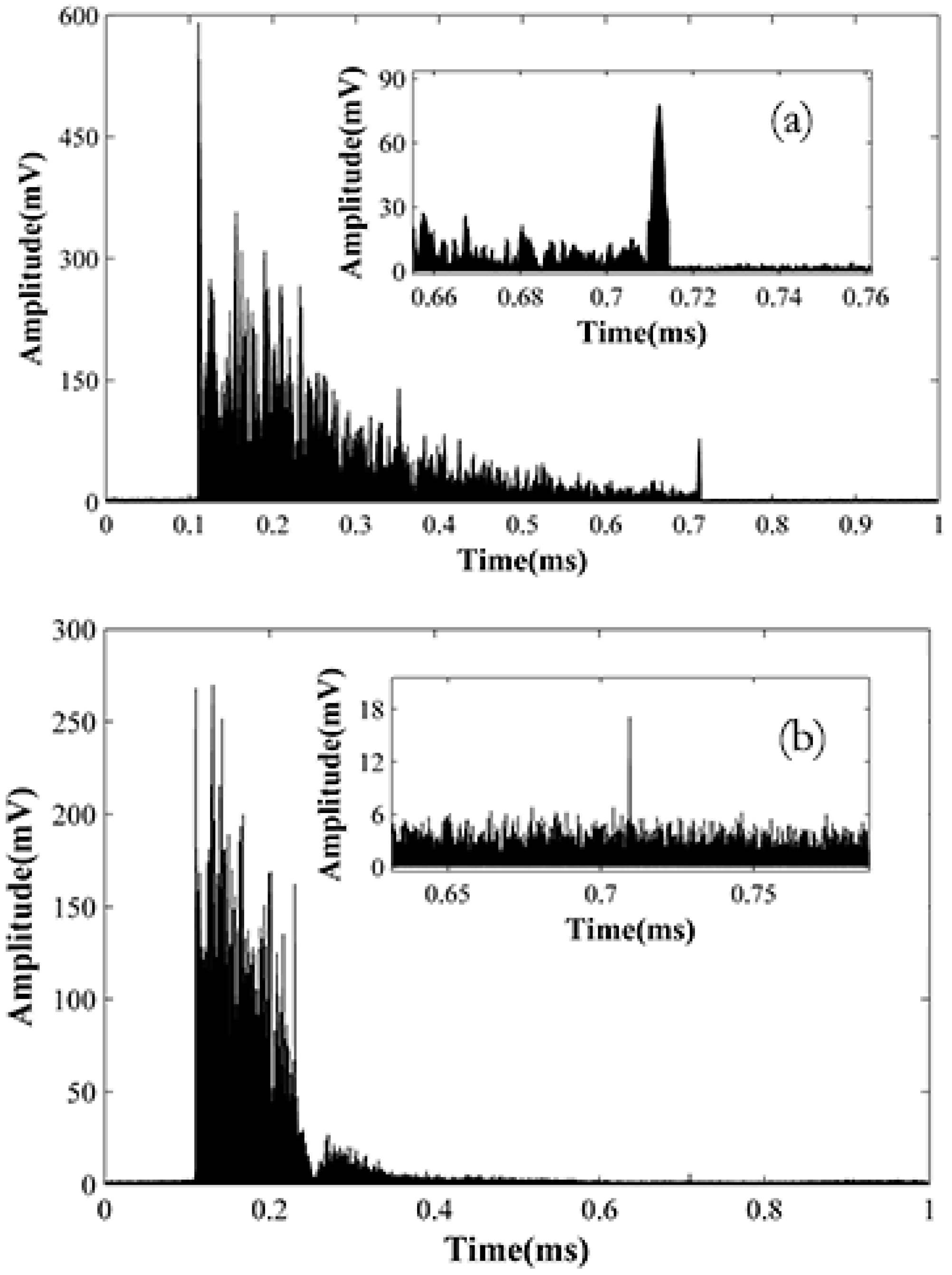
Figure 10.
Back scattering traces and their details under 5000 ns (a) and 200 ns (b) pulse width.
Figure 10.
Back scattering traces and their details under 5000 ns (a) and 200 ns (b) pulse width.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








