
Temporal Data-Driven Sleep Scheduling and Spatial Data-Driven Anomaly Detection for Clustered Wireless Sensor Networks

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
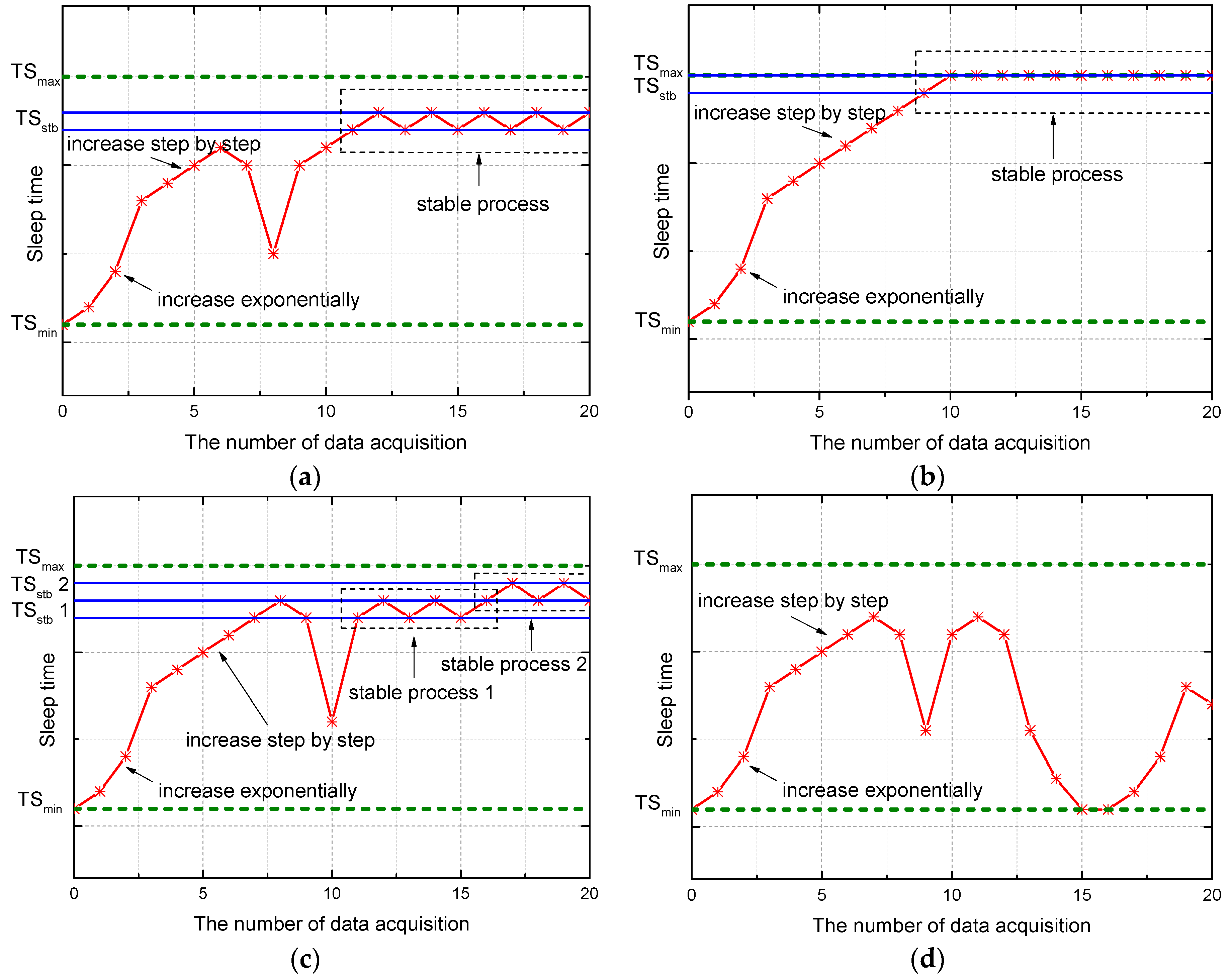
3. Temporal Data-Driven Sleep Scheduling Model
| TDSS Model: Temporal Data-Driven Sleep Scheduling Model |
| Input: Sensor data of a single sensor node, TSmax, TSmin, T, N and τ. |
| Output: The sleep time TS |
| 1. Initialize TSmax, TSmin, T, N = 0 and τ. |
| 2. Collect the first sensor data, enter the sleeping state with TS = TSmin, and then collect the second sensor data. |
| 3. while (true) |
| 4. while (∆V < τ) |
| 5. TS = TS × 2, N = 0 |
| 6. if TS > TSmax, then |
| 7. TS = TS/2 + T |
| 8. if TS > TSmax, then |
| 9. TS = TSmax |
| 10. Enter the sleeping state, and then collect sensor data after TS |
| 11. while (∆V ≥ τ) |
| 12. N = N + 1 |
| 13. if N ≤ 1, then |
| 14. TS = TS − T |
| 15. else if N ≤ 3, then |
| 16. TS = TS/2 |
| 17. else if N >3, then |
| 18. TS = TSmin |
| 19. if TS < TSmin, then |
| 20. TS = TSmin |
| 21. Enter the sleeping state, and then collect the sensor data after TS |
| 22. end |
4. Cluster-Based Cooperation Mechanism
4.1. Long and Linear Cluster Structure
4.2. Cooperative TDSS in the Cluster
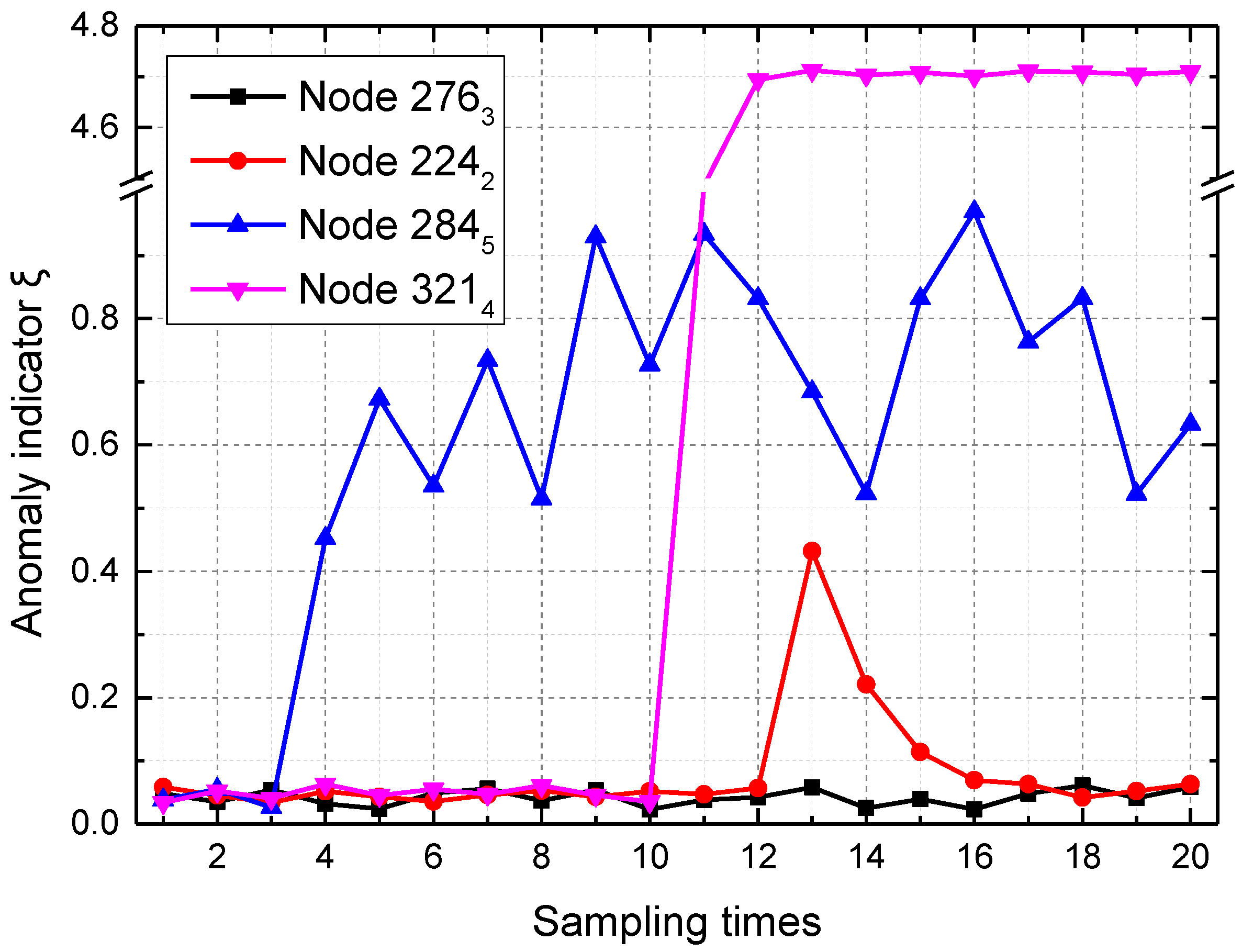
4.3. Spatial Data-Driven Anomaly Detection in the Cluster
5. Performance Evaluation
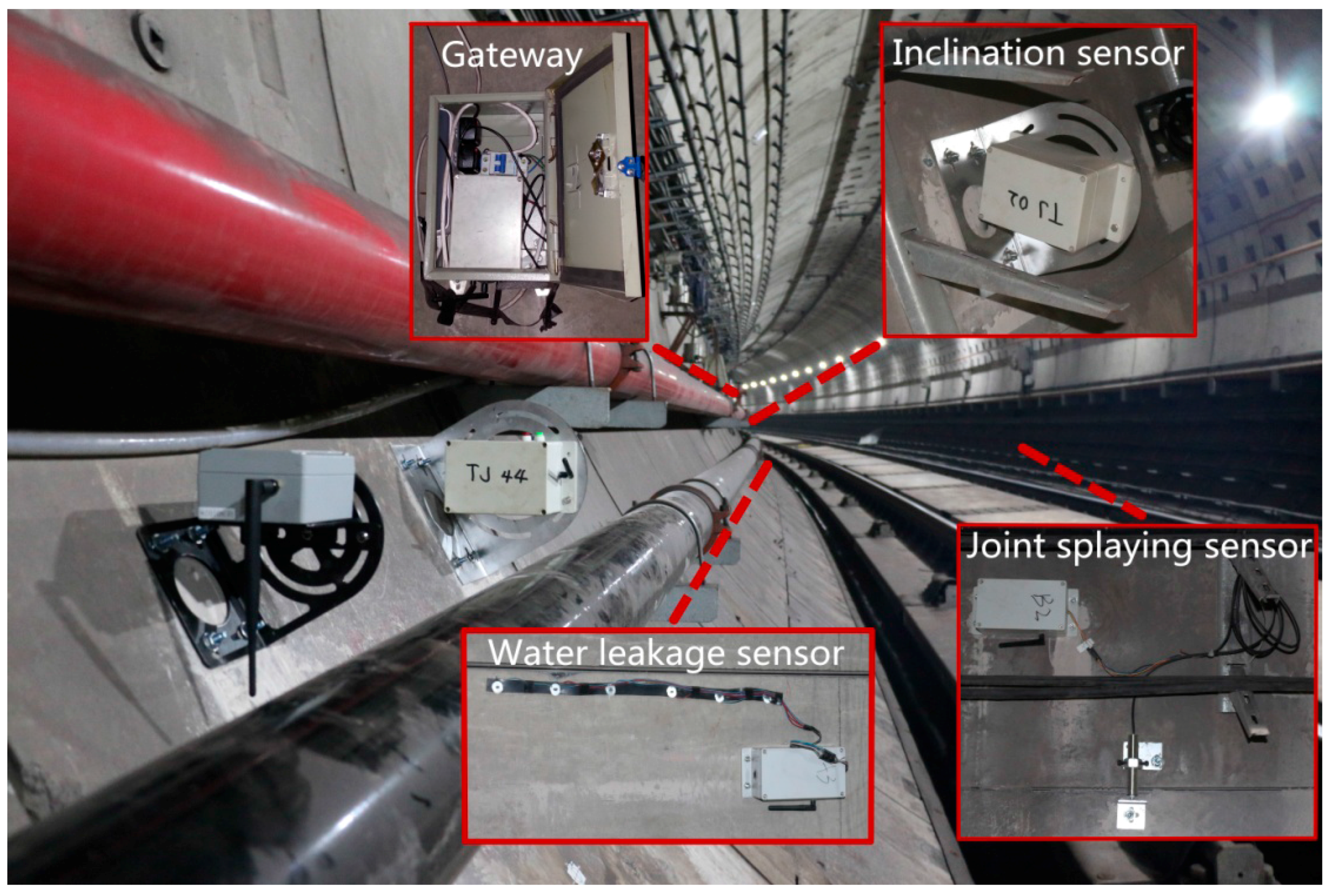
5.1. Experiment Platform
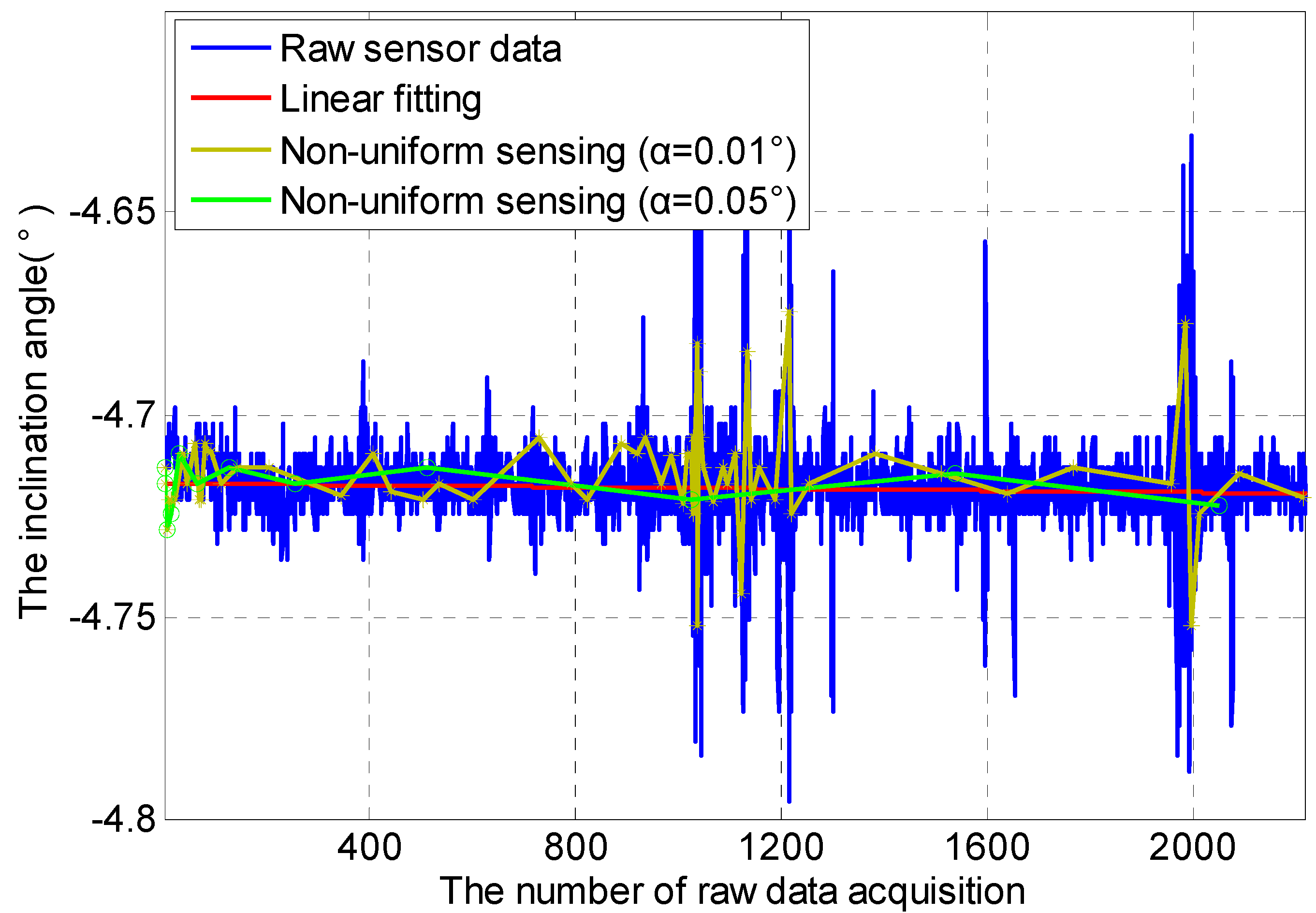
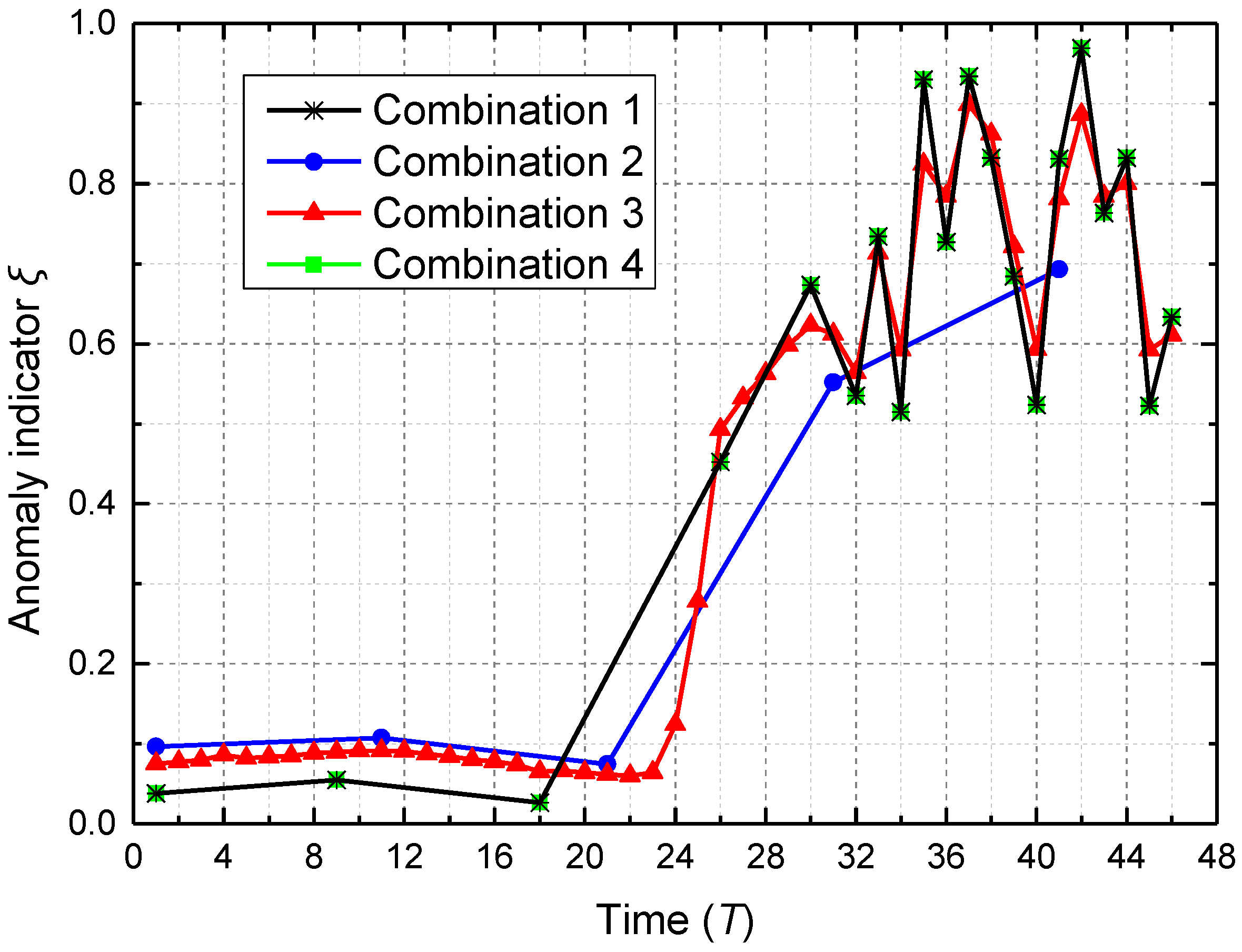
5.2. Experimental Analysis in a Short-Term Span
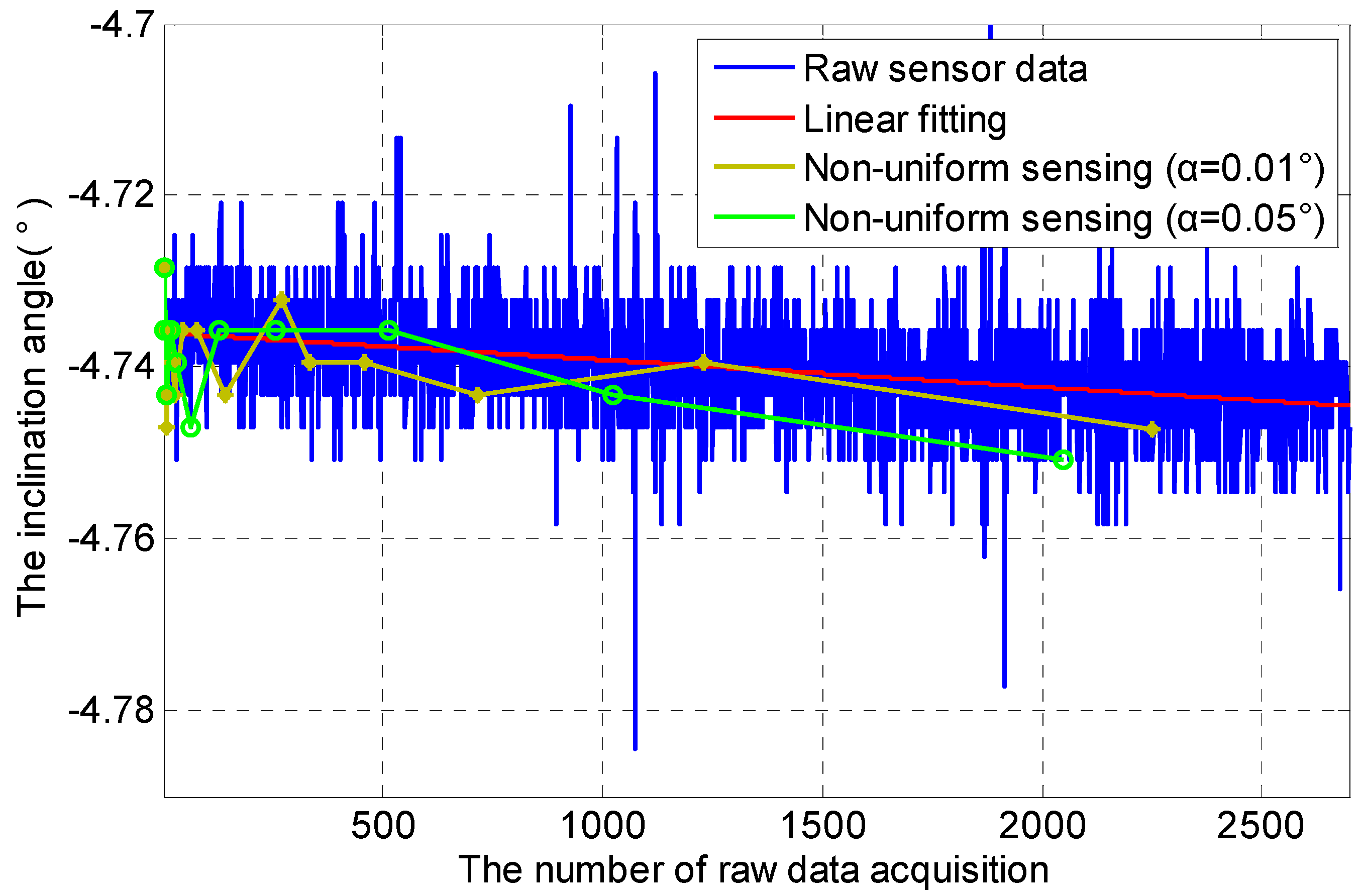
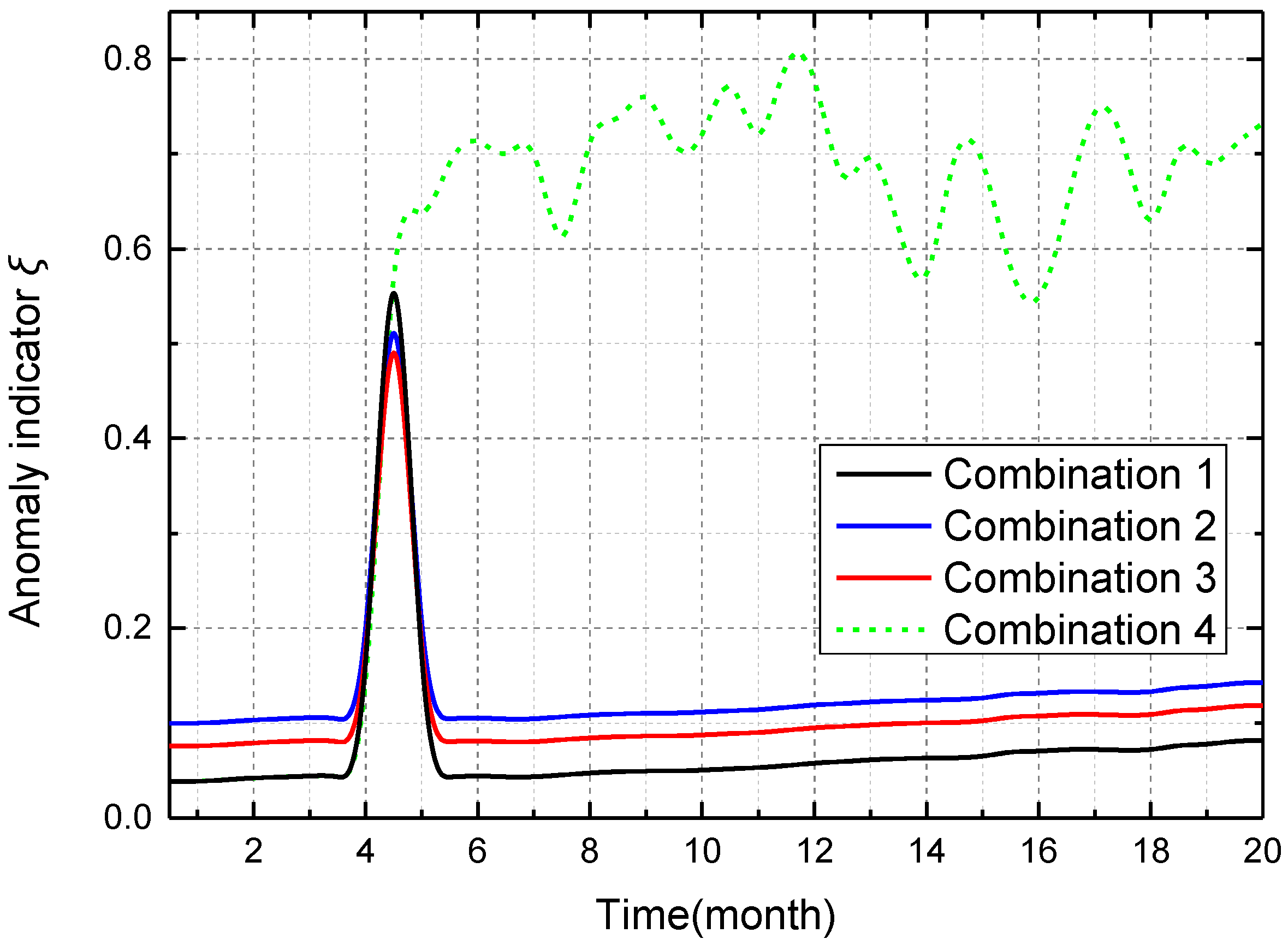
5.3. Experimental Analysis over a Long-Term Span
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Aygün, B.; Gungor, V.C. Wireless sensor networks for structure health monitoring: Recent advances and future research directions. Sens. Rev. 2011, 31, 261–276. [Google Scholar] [CrossRef]
- Sayyed, A.; de Araújo, G.M.; Bodanese, J.P.; Becker, L.B. Dual-stack single-radio communication architecture for UAV acting as a mobile node to collect data in WSNs. Sensors 2015, 15, 23376–23401. [Google Scholar] [CrossRef] [PubMed]
- He, B.; Li, Y.; Huang, H.; Tang, H. Spatial–temporal compression and recovery in a wireless sensor network in an underground tunnel environment. Knowl. Inf. Syst. 2014, 41, 449–465. [Google Scholar] [CrossRef]
- Chen, Z.; Ranieri, J.; Zhang, R.; Vetterli, M. DASS: Distributed adaptive sparse sensing. IEEE Trans. Wirel. Commun. 2015, 14, 2571–2583. [Google Scholar] [CrossRef]
- Al-Kahtani, M.S. Efficient Cluster-Based Sleep Scheduling for M2M Communication Network. Arab. J. Sci. Eng. 2015, 40, 2361–2373. [Google Scholar] [CrossRef]
- He, B.; Li, G. PUAR: Performance and usage aware routing algorithm for long and linear wireless sensor networks. Int. J. Distrib. Sens. Netw. 2014, 2014. [Google Scholar] [CrossRef]
- Tyagi, S.; Kumar, N. A systematic review on clustering and routing techniques based upon LEACH protocol for wireless sensor networks. J. Netw. Comput. Appl. 2013, 36, 623–645. [Google Scholar] [CrossRef]
- Dhasian, H.R.; Balasubramanian, P. Survey of data aggregation techniques using soft computing in wireless sensor networks. IET Inf. Secur. 2013, 7, 336–342. [Google Scholar] [CrossRef]
- Alsheikh, M.A.; Lin, S.; Niyato, D.; Tan, H.-P. Rate-distortion Balanced Data Compression for Wireless Sensor Networks. IEEE Sens. J. 2016, 16, 5072–5083. [Google Scholar] [CrossRef]
- Arunraja, M.; Malathi, V.; Sakthivel, E. Energy conservation in WSN through multilevel data reduction scheme. Microprocess. Microsyst. 2015, 39, 348–357. [Google Scholar] [CrossRef]
- Gong, B.; Cheng, P.; Chen, Z.; Liu, N.; Gui, L.; de Hoog, F. Spatiotemporal compressive network coding for energy-efficient distributed data storage in wireless sensor networks. IEEE Commun. Lett. 2015, 19, 803–806. [Google Scholar] [CrossRef]
- Ma, S.; Qian, J.; Sun, Y. Optimal sleep scheduling scheme for wireless sensor networks based on balanced energy consumption. J. Comput. 2013, 8, 1610–1617. [Google Scholar] [CrossRef]
- Yang, O.; Heinzelman, W. An adaptive sensor sleeping solution based on sleeping multipath routing and duty-cycled MAC protocols. ACM Trans. Sens. Netw. TOSN 2013, 10, 10. [Google Scholar] [CrossRef]
- Liu, F.; Tsui, C.Y.; Zhang, Y.J. Joint routing and sleep scheduling for lifetime maximization of wireless sensor networks. IEEE Trans. Wirel. Commun. 2010, 9, 2258–2267. [Google Scholar] [CrossRef]
- Titouna, C.; Aliouat, M.; Gueroui, M. Outlier detection approach using bayes classifiers in wireless sensor networks. Wirel. Pers. Commun. 2015, 85, 1009–1023. [Google Scholar] [CrossRef]
- Nisha, U.B.; Maheswari, N.U.; Venkatesh, R.; Abdullah, R.Y. Improving Data Accuracy Using Proactive Correlated Fuzzy System in Wireless Sensor Networks. KSII Trans. Internet Inf. Syst. 2015, 9, 3515–3538. [Google Scholar]
- Xiang, Y.; Xuan, Z.; Tang, M.; Zhang, J.; Sun, M. 3D space detection and coverage of wireless sensor network based on spatial correlation. J. Netw. Comput. Appl. 2016, 61, 93–101. [Google Scholar] [CrossRef]
- Elson, J.; Girod, L.; Estrin, D. Fine-grained network time synchronization using reference broadcasts. ACM SIGOPS Oper. Syst. Rev. 2002, 36, 147–163. [Google Scholar] [CrossRef]













© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; He, B.; Huang, H.; Tang, L. Temporal Data-Driven Sleep Scheduling and Spatial Data-Driven Anomaly Detection for Clustered Wireless Sensor Networks. Sensors 2016, 16, 1601. https://doi.org/10.3390/s16101601
Li G, He B, Huang H, Tang L. Temporal Data-Driven Sleep Scheduling and Spatial Data-Driven Anomaly Detection for Clustered Wireless Sensor Networks. Sensors. 2016; 16(10):1601. https://doi.org/10.3390/s16101601
Chicago/Turabian StyleLi, Gang, Bin He, Hongwei Huang, and Limin Tang. 2016. "Temporal Data-Driven Sleep Scheduling and Spatial Data-Driven Anomaly Detection for Clustered Wireless Sensor Networks" Sensors 16, no. 10: 1601. https://doi.org/10.3390/s16101601