1. Introduction
With the increase of the demand for the ubiquitous Location-based Services (LBSs), localization and navigation applications become more important in daily life. In an outdoor environment, people prefer to use the Global Navigation Satellite System (GNSS) to achieve the LBSs, whereas the signal from the satellites cannot be easily received in indoor environment, which results in the failure of the GNSS. However, many LBSs significantly depend on the highly-accurate indoor localization such as when finding goods in the mall, locating in the mine, and rescuing.
Wi-Fi localization has great promise in the area of indoor localization due to the wide deployment of the commodity Wi-Fi devices. Up to now, existing Wi-Fi localization systems are mainly based on the Angle-of-arrival (AOA) or Received Signal Strength (RSS) measurement. The accuracy of the AOA measurement-based localization systems is around 0.4 m [
1,
2]. They measure the AOA of the signal from at least two Access Points (APs), and then use the triangulation algorithm to locate the target. By using the well-known Multiple Signal Classification (MUSIC) algorithm [
3], each AP is equipped with six antennas for the AOA estimation since there are normally at most six significant signal paths in indoor environment [
4]. Thus, the AOA measurement-based localization systems depend on the special hardware modification like the design of specific antennas, which is challenging and with significantly high cost. To solve this problem, we propose a new approach by using the Channel State Information (CSI) which is available in many existing commodity Wi-Fi devices to estimate the AOA of the multipath signal with small hardware modification.
At the same time, the RSS measurement-based localization systems have also become popular by using the existing commodity Wi-Fi devices. Although they are easy to be deployed, the corresponding localization error is about 3 m [
5,
6], which is much larger than the one by the AOA measurement-based localization systems. The RSS measurement-based localization systems generally involve two phases. In the first phase, the RSS measurements at each Reference Point (RP) are collected, and then used to construct the mapping relationship between the RSS measurements and the corresponding RPs, namely radio map. In the second phase, the Euclidean distance between the newly collected RSS measurements and pre-collected RSS measurements in radio map is calculated, and then the RPs with the RSS measurements corresponding to the smallest Euclidean distances are used to estimate the locations of the target. In this paper, we use both the AOA and RSS measurements to construct a new objective function for the indoor localization problem. On one hand, our approach improves the localization accuracy compare with the one by using the RSS or AOA measurement solely. On the other hand, it reduces the time and labor cost involved in the radio map construction significantly, and also exhibits well robustness to the environmental change.
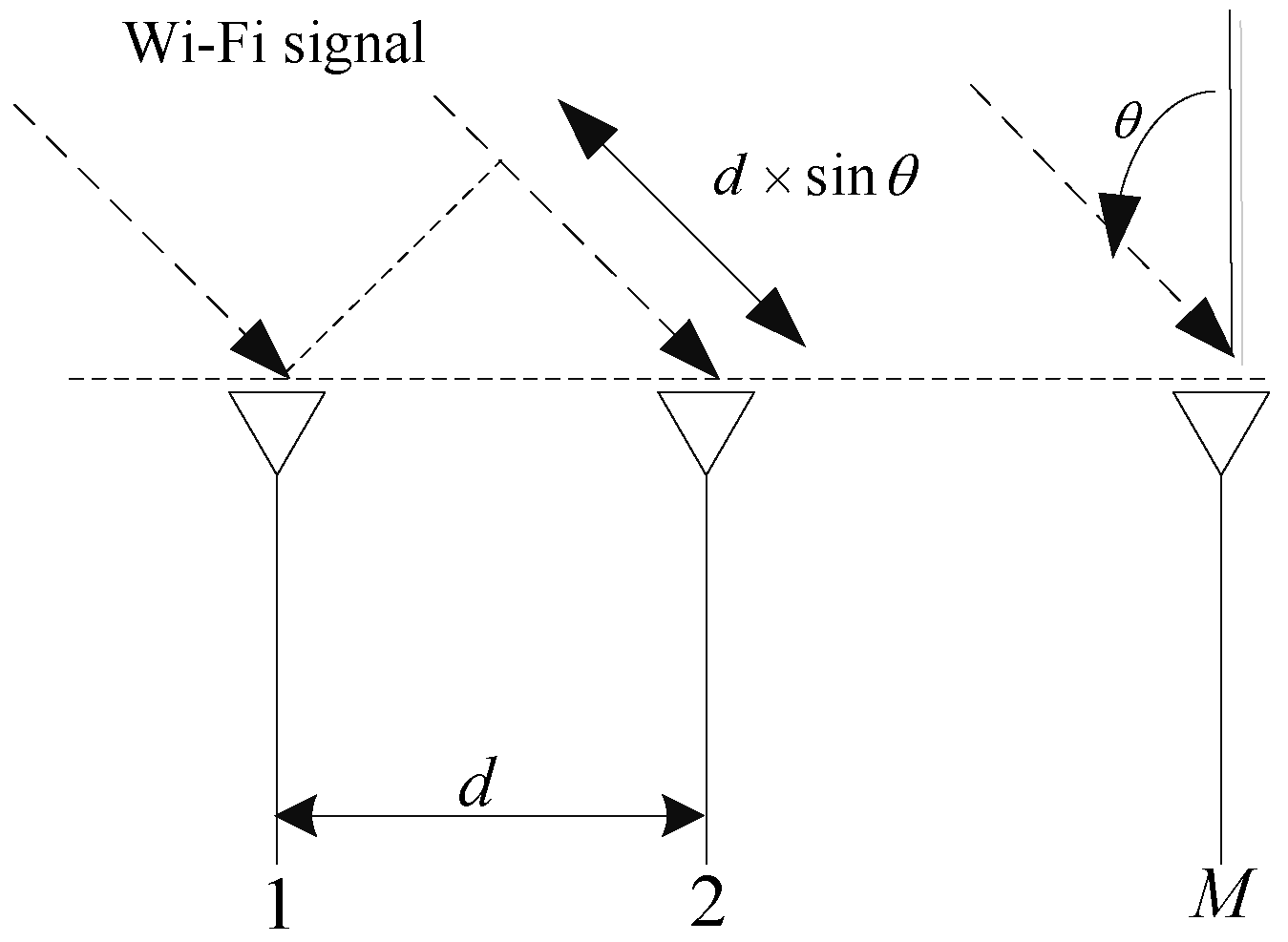
In summary, the main contribution of this paper is to design a new precise indoor localization system based on the CSI from the commodity Wi-Fi APs to estimate the AOA of the multipath signal. To overcome the limitation of the conventional AOA estimation approaches, which generally require at least six antennas, we rely on the Orthogonal Frequency Division Multiplexing (OFDM) modulation property to estimate the AOA of the signal with only three antennas. Our approach is based on the fact that the multipath effect not only results in the measurable change of the CSI in the antenna array, but also changes the CSI across different sub-carriers due to the difference of the Time of Arrival (TOA) measurement. Specifically, when the signal with the AOA
θ arrives at the linear antenna array which consists of
M antennas, the difference of the propagation delay between every two neighboring antennas with the spacing distance
d is
, as shown in
Figure 1. In addition, since the Wi-Fi signal is based on the OFDM modulation and the different subcarriers are with different frequencies, the different subcarriers will be featured with different accumulative phases with respect to the same TOA measurement.
In an indoor environment, the Wi-Fi signal from the same AP is generally correlated, which is not appropriate for the conventional MUSIC algorithm. To solve this problem, we propose a new two-dimensional spatial smoothing approach for the AOA estimation with respect to the multiple correlated signals. Furthermore, the CSI measured by the Wi-Fi Network Interface Card (NIC) suffers from the measurement error due to the imperfect signal processing by the hardware like the signal boundary detection, which introduces the additional time delay, namely Packet Detection Delay (PDD), to all the signal paths. Since different signal packets are with different PDD, the TOA measurement cannot capture the true time taken by the signal traveling from the APs to the target. In this paper, we use the CSI from multiple APs to estimate the AOA and TOA measurements of the multipath signal to locate the target. However, the most important problem is the identification of the direct signal path from the target to each AP correctly. The authors in [
7] proposed to identify the direct signal path according to the TOA measurement, which may not be reliable in the multipath environment. The authors in [
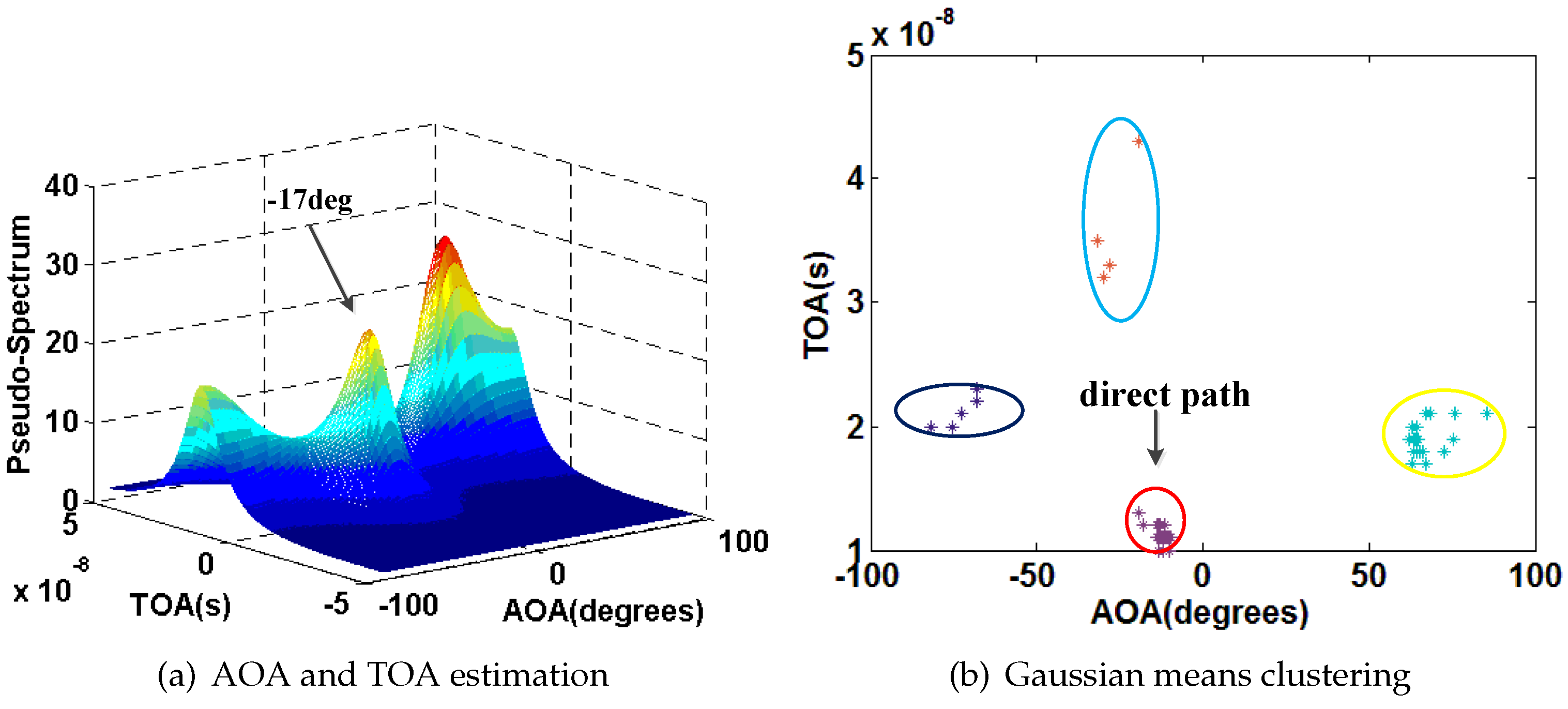
8] declared that the direct signal path is corresponding to the AOA measurement with the highest space spectrum value. However, in the indoor environment, the direct signal path may be weaker than the indirect path which resulting from the multi-path effect.
In this paper, based on the assumption that the signal on the reflected paths is generally with large variation of the AOA and TOA measurements comparing with the one on the direct path, we utilize the Gaussian means clustering algorithm to identify the direct signal path. Considering the fact that the error of the CSI results in the additional noise in the TOA estimation, we propose to use the phase sanitization algorithm to remove the interference of this error before estimating the AOA and TOA measurements.
Different from the existing indoor localization systems which integrate multiple types of measurements [
9,
10], we propose a new linear Least Square (LS)-based object function for the localization. In addition, since the localization problem is non-convex, we use the Second-order Cone Programming (SOCP) relaxation approach to convert it into a convex problem. Our findings are summarized as follows. First of all, the proposed system is easy to be deployed and with small hardware modification. Second, by using the commodity Wi-Fi APs with three antennas, the receiver is independent of the motion sensors like the gyroscope and accelerometer. Third, the proposed system achieves the median error 0.7 m and 68th error 1 m, which are smaller than the ones by the existing systems using the AOA or RSS measurement solely.
We briefly outline the organization of the rest of this paper.
Section 2 gives some related work on the existing Wi-Fi localization systems.
Section 3 describes the steps of the proposed system including the CSI-based AOA estimation, direct signal path identification, and target localization in detail. The performance of our system in an actual indoor environment is discussed in
Section 4. Finally, we conclude the paper in
Section 5.
2. Related Work
The existing Wi-Fi localization systems are mainly based on the propagation modeling [
11] and location fingerprinting [
12]. The systems using the propagation modeling locate the target based on the triangulation approach, while the ones using the location fingerprinting locate the target by constructing the mapping relationship between the RSS patterns and physical locations. One of the most representative location fingerprinting-based localization systems is the RADAR [
13] which achieves the meter-level accuracy. However, it suffers from the time consuming and labor intensive process of radio map construction. There are some evolved RSS measurement-based localization systems which are independent of the huge time and labor cost [
14,
15,
16], and meanwhile they are also robust to the environmental change.
At the same time, there are many fusion localization systems by using the data from the Wi-Fi module and motion sensors like the gyroscope, accelerometer, and magnetometer [
17]. The systems using the motion sensors generally apply the Pedestrian Dead Reckoning (PDR) algorithm to achieve the continuous-time localization [
18,
19], but they are suffered by the accumulative error as the time goes. However, the fusion localization systems are limited for the application since many mobile devices are not embedded with motion sensors.
Since many off-the-shelf Wi-Fi APs supports the Multiple Input Multiple Output (MIMO) technique by using multiple antennas, the AOA measurement-based localization systems have been significantly developed. The ArrayTrack [
20] requires the Wi-Fi APs to be equipped with at least seven antennas to estimate the AOA measurement. The Ubicarse [
1] is based on the Synthetic Aperture Radar (SAR) technique to achieve the sub-meter localization accuracy. However, it requires the target to be equipped with a rotation antenna which cannot be satisfied by the commodity Wi-Fi devices. Recently, there are also some systems use the commodity Wi-Fi devices to estimate AOA measurement [
21].
3. System Description
As shown in
Figure 2, our system consists of three main steps as follows.
CSI-based AOA estimation. We estimate the AOA and TOA based on the CSI obtained from the existing commodity Wi-Fi APs with three antennas, and meanwhile employ the 2-D spatial smoothing algorithm to eliminate the interference of the coherent multi-path signal.
Direct signal path identification. We identify the direct signal path based on the likelihood of each cluster obtained by the Gaussian means clustering algorithm, and meanwhile use the phase sanitization algorithm to avoid the impact of the error of CSI measurement on the TOA estimation.
Target localization. We integrate the AOA and RSS measurements based on the LS criterion to construct a new object function for the localization problem.
In our system, the transmitter is required to conform to the IEEE 802.11n standard for the sake of employing the spatial diversity technique with multiple antennas to achieve the high data transmission rate.
Figure 3 shows the flow chart of signal processing under the 802.11n NIC. The incoming analog signal,
, is processed by the Automatic Gain Controller (AGC) to compensate the signal amplitude attenuation, and then sampled as the discrete signal,
. The packet detector and central frequency offset corrector (CFO) corrector are used to confirm the incoming packet and compensate the central frequency offset respectively. To extract the data correctly, the receiver applies the channel equalization to estimate the impact of the channel on each subcarrier [
22]. The CSI obtained from the channel equalization involves the amplitude and phase information.
In an indoor environment, there are always many signal paths detected at the receiver due to various signal refraction and reflection. Different signal paths are featured with different attenuation and propagation delay, while the corresponding RSS measurements are generally assumed to obey the Gaussian distribution [
23]. Based on the results in [
24], we describe the Channel Frequency Response (CFR) as:
where
L is the number of signal paths.
and
are the path coefficients and propagation delay with respect to the
lth signal path respectively. The CSI is obtained by sampling the CFR with the sampling rate
and
is the sampling interval. In our system, the selected Intel 5300 NIC reports the CSI of 30 subcarriers for each antenna.
3.1. Two-Dimensional Spatial Smoothing
By assuming that there are
K signal paths including the direct and indirect ones, the CSI at three antennas can be described as:
where
is a
vector and
is the CSI of the
nth subcarrier at the
mth antenna. Based on Equations (
1) and (
2), we obtain
where
is a
vector of the path coefficient with respect to the
K signal paths and
is a
noise vector.
is the
direction matrix and
equals to
where
is a
direction vector which is described as:
In Equation (
5),
is a
direction vector of the
kth signal path at the
mth antenna, as shown in Equation (
6).
where
and
is the phase difference of the
ith
subcarrier.
is the frequency interval of every two neighboring subcarriers.
d is the physical distance between every two adjacent antennas.
and
are the AOA and TOA with respect to the
kth signal path respectively.
The covariance matrix of the CSI in Equation (
3) is calculated by:
where
is the conjugate transpose of
. Based on the result in [
25], the eigenvectors corresponding to the noise are orthogonal to the direction vectors in
and the space spectrum of the AOA and TOA,
θ and
τ, can be described as:
where
is the set of eigenvectors with respect to the noise subspace of
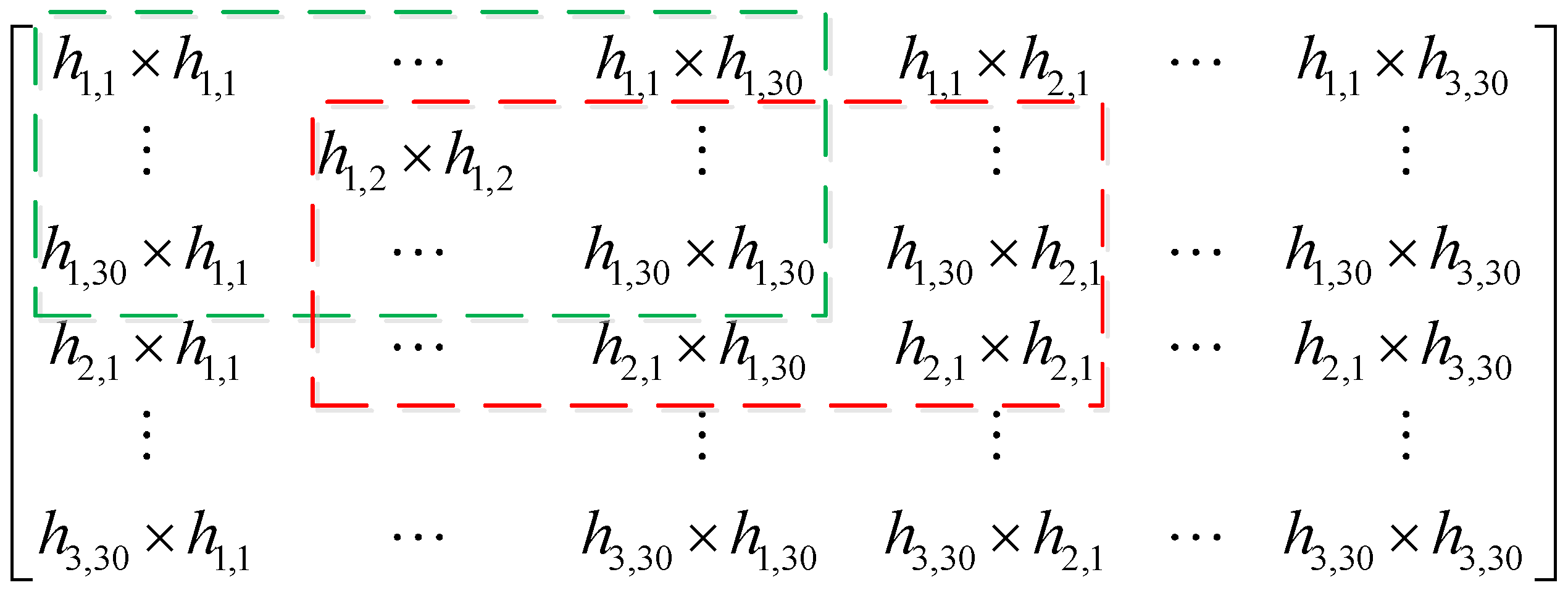
To eliminate the interference of the coherent signals, we conduct the Two-dimensional Spatial Smoothing (2D-SS) [
26], on
instead of
, as shown in
Figure 4. The elements in the dashed green and red boxes construct the covariance matrices of the first and second sub-arrays respectively. Based on the observation that the first elements of the covariance matrices of the first and second sub-arrays are
and
, we get the covariance matrices of the existing sub-arrays by increasing the subcarrier ID and antenna index number to
,
respectively,
and
are chosen. Then, the number of sub-arrays and elements in each sub-array equals to
and
respectively.
The covariance matrix of the CSI after the process of 2D-SS on
,
, is modified into
where
is the sub-covariance matrix in
with respect to the
nth subcarrier at the
mth antenna. Then, we conduct the MUSIC algorithm on the smoothed covariance matrix of the CSI to obtain the direction vectors, as well as the AOA and TOA with respect to each signal path.
To verify the effectiveness of the 2D-SS in AOA estimation, two simulations are conducted as follows. We assume that there are 30 subcarriers operating at the 5.2 GHz with the spacing distance 1.25 MHz. The antenna array contains three antennas and the spacing distance between every two adjacent antennas, d, equals to , where λ is the wavelength of the signal. The impact of value d on the AOA estimation will be further discussed in the following section.
In the first simulation, we assume that there are four incoherent signals with the AOA
,
,
,
and TOA 10 ns, 30 ns, 20 ns, and 60 ns respectively.
Figure 5 shows the results of the AOA and TOA estimation, from which we can find that by the 2D-SS, the estimated AOA and TOA are much similar to the real ones.
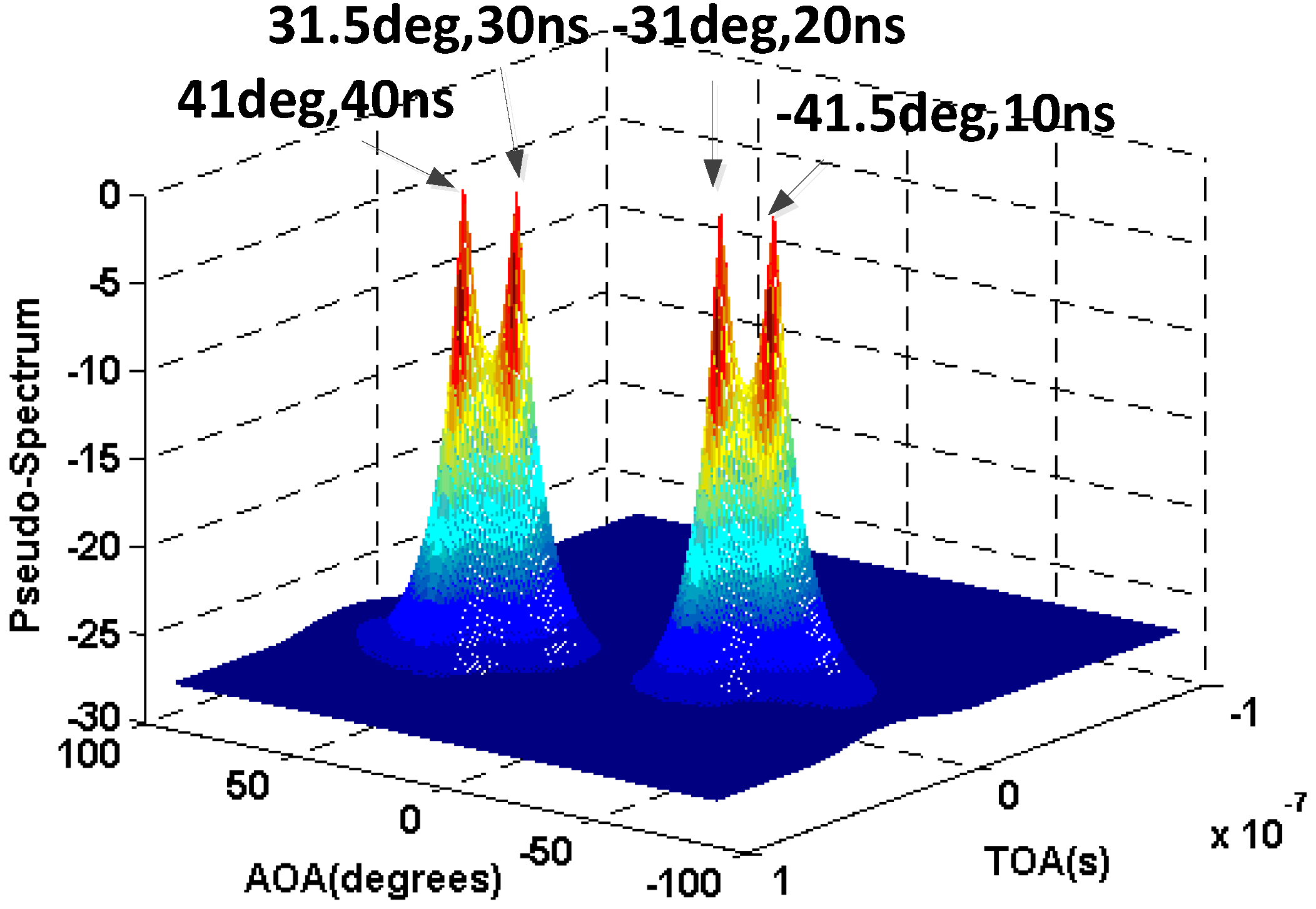
In the second simulation, we assume that there are four coherent signals with the AOA
,
,
,
and TOA 10 ns, 20 ns, 30 ns, and 40 ns.
Figure 6 and
Figure 7 show the results of the AOA and TOA estimation without and with the 2D-SS respectively.
From these figures, we can conclude that the 2D-SS can not only effectively preserve but also significantly improve the accuracy of the AOA and TOA estimation for the incoherent and coherent signals respectively.
3.2. Direct Signal Path Identification
3.2.1. Packet Detection Delay
To identify the direct signal path, some prior work [
27,
28] relies on the TOA measurement to claim that the signal path with the shortest TOA is most likely to be the direct one. However, the TOA estimation by using the raw CSI obtained from the Wi-Fi NIC cannot be accurate due to the channel distortion and hardware imperfection.
In a Wi-Fi network, to detect the packets, the receiver is required to sample the incoming signal. The process of signal sampling involves the Packet Detection Delay (PDD) since the starting boundary of the packets is unknown. By setting
as the PDD, the impact of the PDD on the phase measurement is discussed as follows. Based on Equation (
1), we conduct the IFFT (Inverse Fast Fourier Transform) to transform the CFR to the Channel Impulse Response (CIR),
where
is the Delta function. Then, we conduct the discrete Fourier transform to obtain the discrete value of the CFR,
where
is the discrete value of the CIR.
k is the frequency index.
N is the length of the IFFT. By considering the PDD in
, we convert Equation (
11) into
In Equation (
12), we can find that PDD adds a constant offset to the TOA estimates of all the paths, and this common additional delay manifests itself as a linear in frequency term in the phase response of the channel [
29]. Hence, PDD results in adding
to the phase of the CFR value of
kth sub-carrier.
3.2.2. Phase Sanitization
In some prior work [
20,
30], it is found that the AOA of the direct signal path has smaller variation compare with the indirect ones. Based on this, we classify the peak points obtained from the MUSIC algorithm into different clusters and the clusters with the smaller variance of the AOA and TOA are selected to the candidates of the direct signal path. Since the PDD varies for different packets, the variation of the TOA is difficult to be obtained. To solve this problem, we propose the phase sanitization algorithm to avoid the impact of the PDD on different packets in the results that follow.
By setting
as the phase of the CSI of the
nth sub-carrier at the
mth antenna, we aim to optimize the value
to construct a linear fitting model for the phase of the CSI to avoid the impact of the PDD on different packets. The linear fitting function is defined as:
where
n is the sub-carrier index.
μ is the slope of the function.
β is a constant. To optimize the linear fitting, we construct
To solve this optimal problem in Equation (
14), we employ the well-known least square algorithm to get the optimal value
based on the CSI phase across 30 subcarriers at three antennas.
Then the phase of the CSI be modified into
Figure 8 shows a simple example about the AOA and TOA estimation with and without phase sanitization. The experimental setting is described in
Section 4 in detail.
Figure 8a,b show the results of AOA and TOA estimation without and with phase sanitization for 20 consecutive packets. From these figures, we can find that the phase sanitization algorithm not only preserves the result of AOA estimation, but also avoids the impact of the PDD on different packets. Our phase sanitization is similar to the data sanitization process in [
29] and is an extension of the process to three antennas.
3.2.3. Gaussian Means Clustering
After the peak points are obtained from the MUSIC algorithm, we use the Gaussian means clustering algorithm to identify the direct signal path.
Specifically, first of all, we randomly select k peak points as the k initial clustering centers, and then conduct the K-means clustering to obtain clusters. Second, we examine the distribution of the peak points in each cluster. If the peak points in a cluster do not approximately obey the Gaussian distribution, we randomly select two peak points in this cluster as the two new clustering centers, and then conduct the K-means clustering of the peak points in this cluster to obtain two new clusters. We continue this process until the peak points in every cluster approximately obey the Gaussian distribution or cannot be split further.
3.2.4. Likelihood Assignment
From
Section 3.2.2, we obtain that since the TOA of all the paths have the same delay due to the PDD, we use the phase sanitization method to remove the variance of the TOA, and meanwhile rely on the TOA information to identify the direct path which travels the shortest relative distance. To guarantee the robustness of our system, we select several paths with the relative short TOA as the candidates.
Since the number of peak points in the clusters which are corresponding to the real signal paths is larger than the one corresponding to the spurious paths, we rely on the probabilistic analysis to assign a likelihood value to each path. The likelihood value of each path is calculated by incorporating the number of peak points with the variance of the AOA and TOA.
where
,
, and
are the number of peak points and the variance of the AOA and TOA in the cluster corresponding to the
kth signal path.
,
, and
are the weights of the number of peak points and the variance of the AOA and TOA.
By using the concept of the likelihood of each signal path, the process of direct signal path identification is described in
Figure 9.
3.3. Target Localization
To locate the target, we use the Second-order Cone Programming (SOCP) relaxation approach to transform the localization problem into a convex one based on the interior-point algorithm [
31]. Specifically, by setting
and
as the locations of the APs and target location, we estimate the distance between the target and each AP by
where
(in dB).
γ is the path loss exponent.
and
are the transmit power of the target and receiving power at the
ith AP respectively.
Based on the geometrical relations in
Figure 10, the angle between the target and the
ith AP is calculated by
where
and
are the physical coordinates of the target and the
ith AP. For simplicity, we assume that the APs and target are located with the same height. The impact of the height difference between the APs and target on the AOA estimation will be discussed further in the following section.
Based on the Least Square (LS) criterion, the estimated location of the target,
, can be obtained by minimizing the objective function below.
where
.
Problem in Equation (
19) is obviously non-convex due to the second derivative of Equation (
19) greater than zero and has no closed-form solution. To convert the problem in Equation (
19) into a convex one, we first set the auxiliary variables
,
,
, and
, where
and
. Then, we obtain
In optimization, we can always assume that the objective is a linear function of the variables. This can be done via the epigraph representation of the problem, which is based on adding a new scalar variable. Based on [
32] we set the epigraph variables
,
, and
, and we obtain
Based on Equation (
21), we can find that the localization problem is transformed into a convex one which can be solved by using the CVX package [
33].



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}