
An Arrival and Departure Time Predictor for Scheduling Communication in Opportunistic IoT

 ,
,  ,
,
Abstract
:1. Introduction
2. Background and Related Work
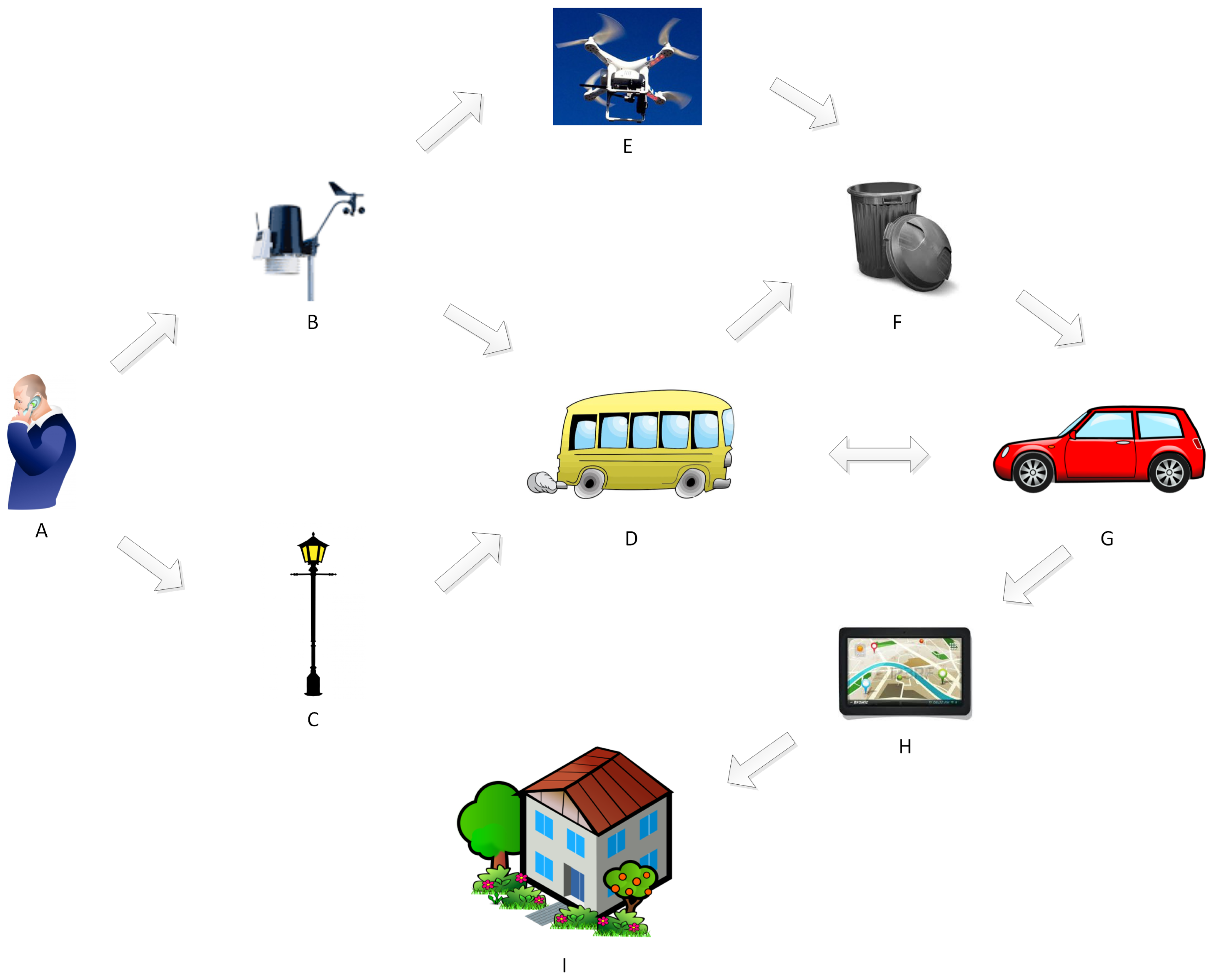
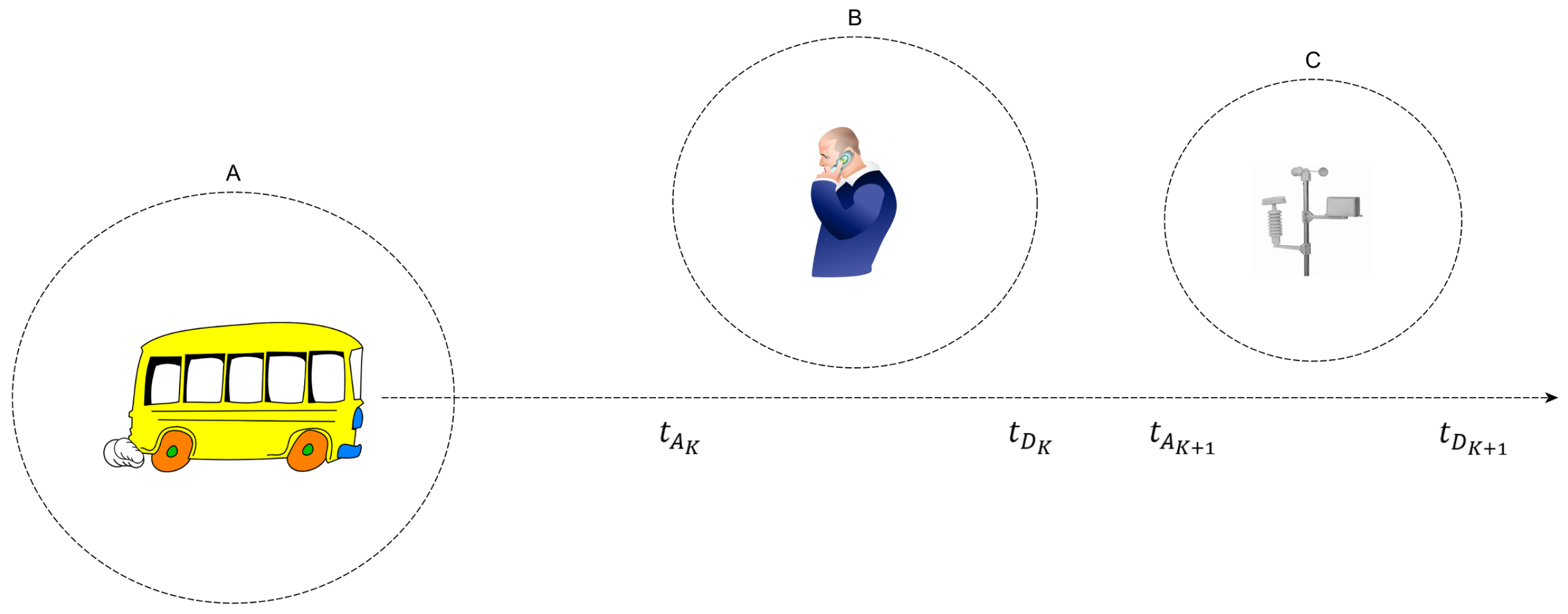
2.1. Scenario of Opportunistic IoT
2.2. Neighbour Discovery
3. Prediction and Scheduling Model
3.1. Temporal Difference Learning
| Algorithm 1: LSTD(λ) for approximate policy evaluation - Boyan (1999) |
 |
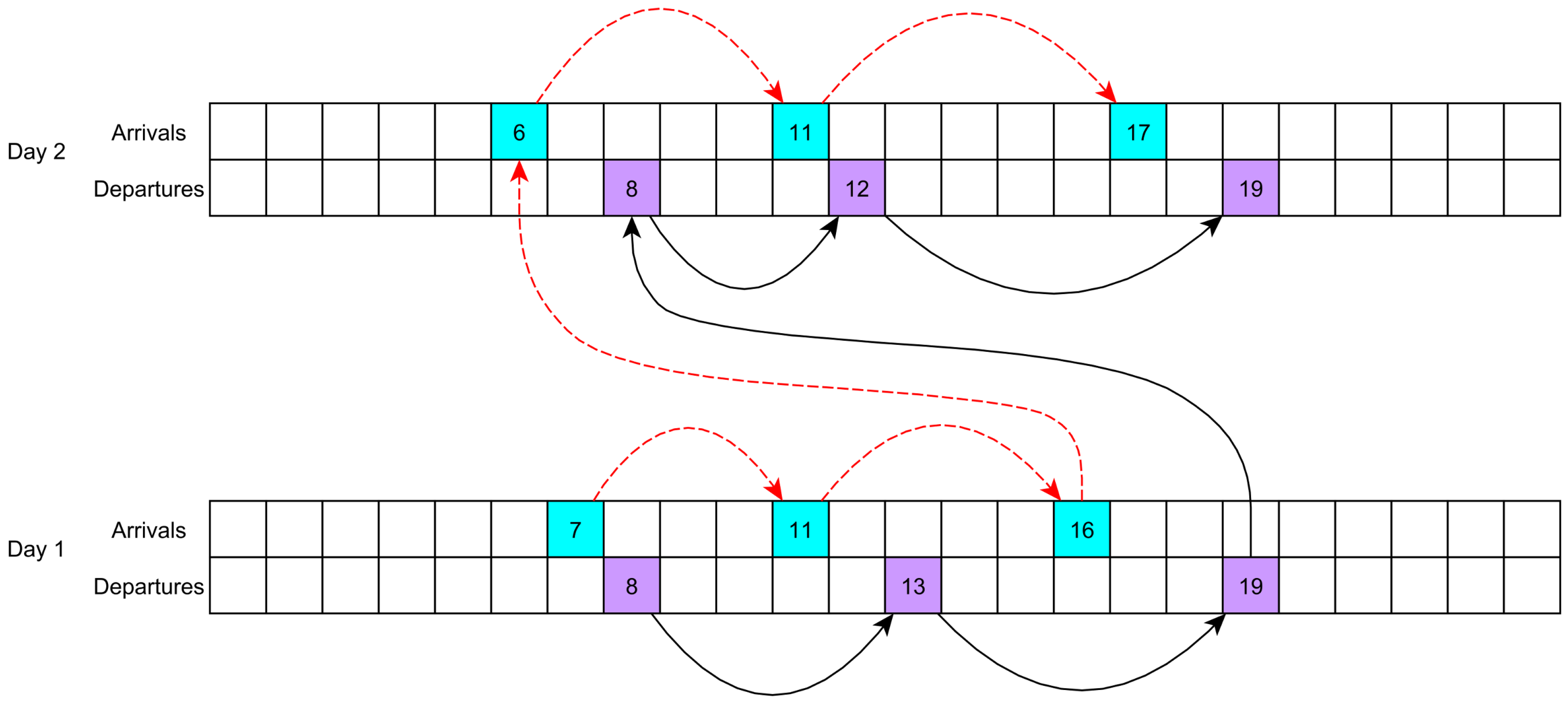
3.2. Arrival and Departure Time Predictor
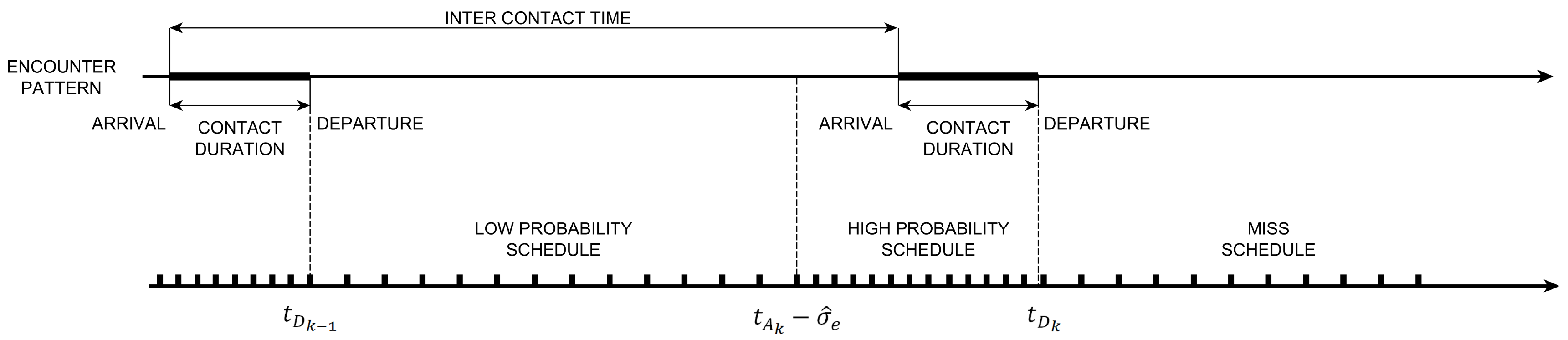
3.3. Resource Discovery Planner and Scheduler
- Low Probability Schedule (LPS) to be scheduled when contacts are predicted with lower probability thus introducing energy savings.
- High Probability Schedule (HPS) to be scheduled when contacts are predicted with high probability thus allowing for a timely discovery.
- Miss Schedule (MS) to be scheduled when discovery did not happen in previous schedules.
- High Latency Action (HLA) guaranteeing discovery within a temporal bound .
- Low Latency Action (LLA) guaranteeing discovery within a temporal bound .
4. Results
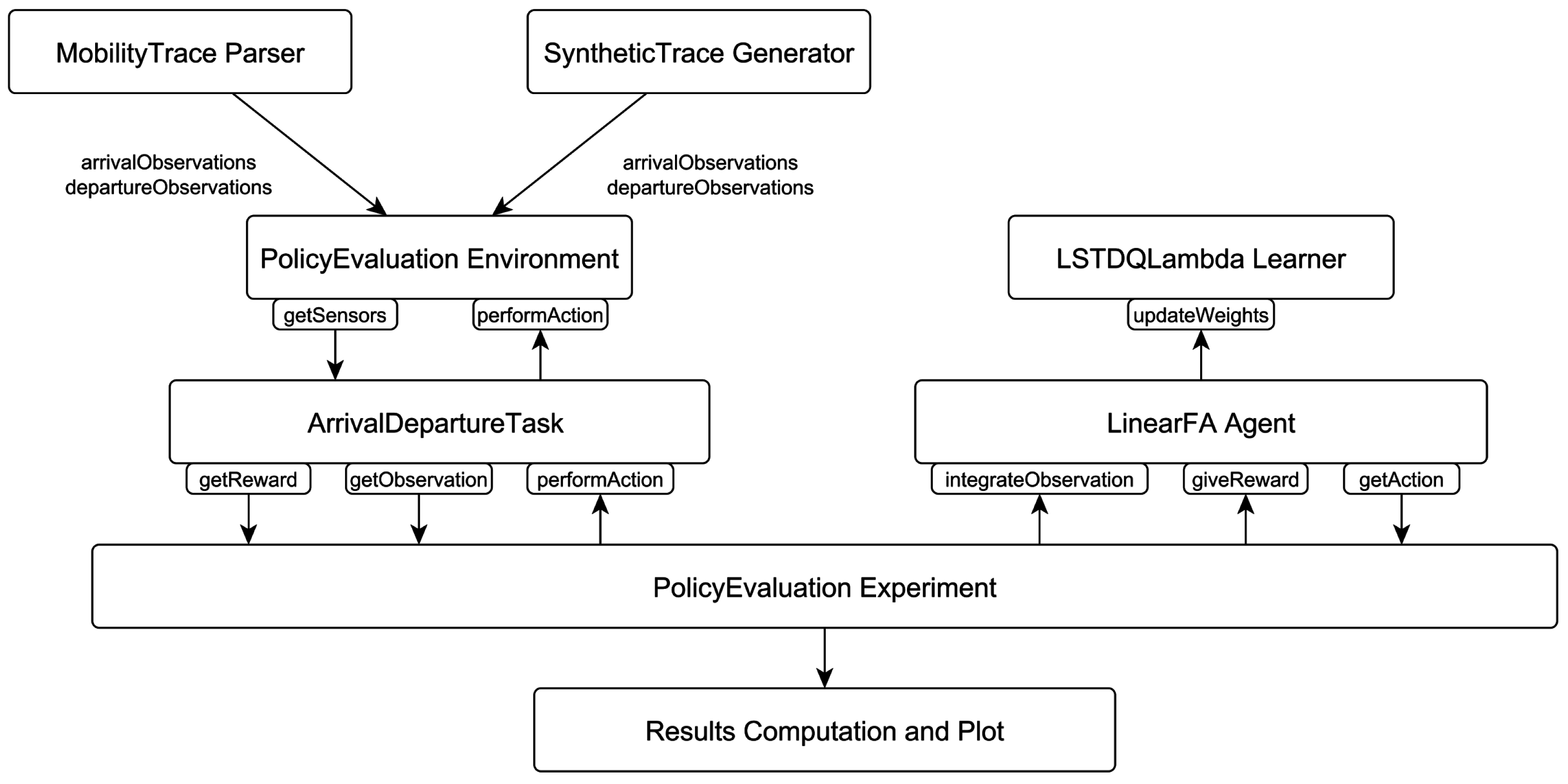
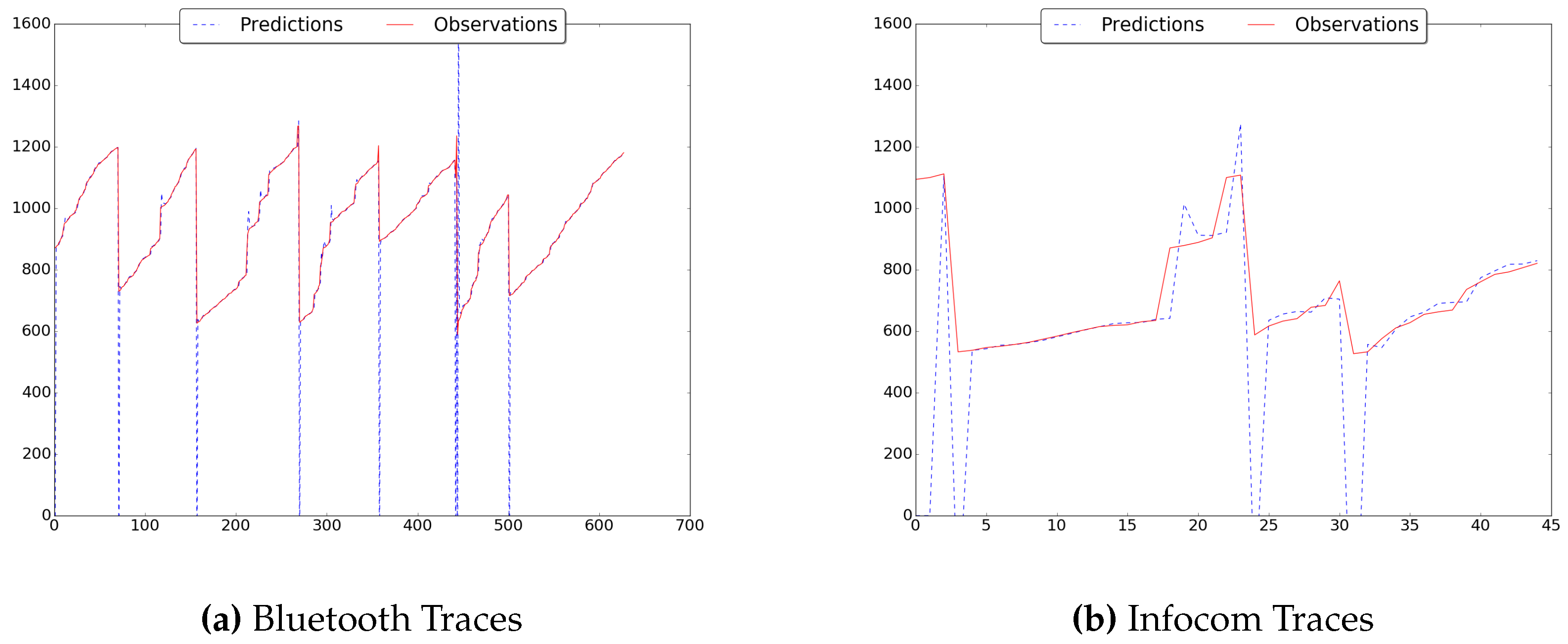
4.1. Predictor Evaluation
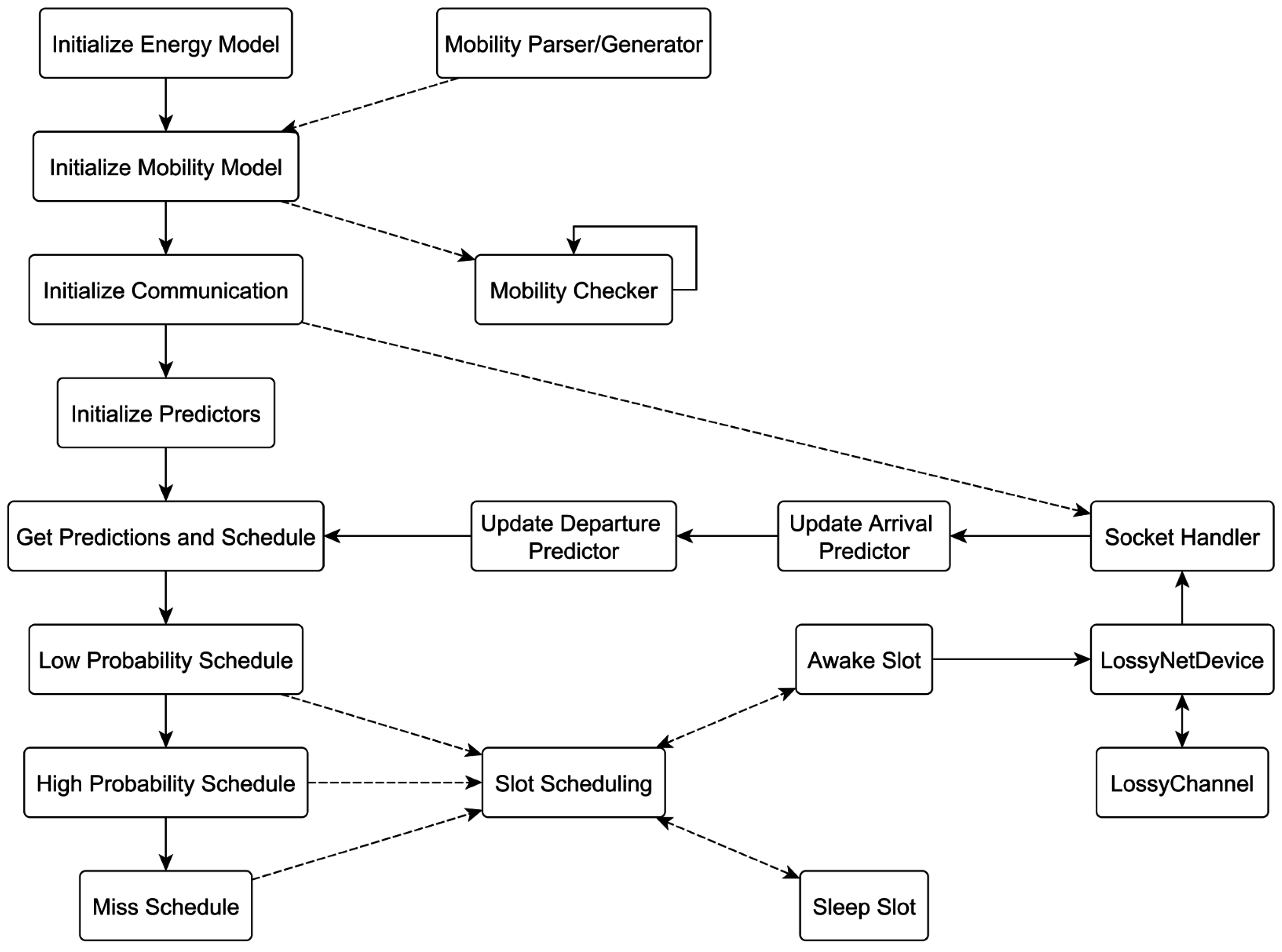
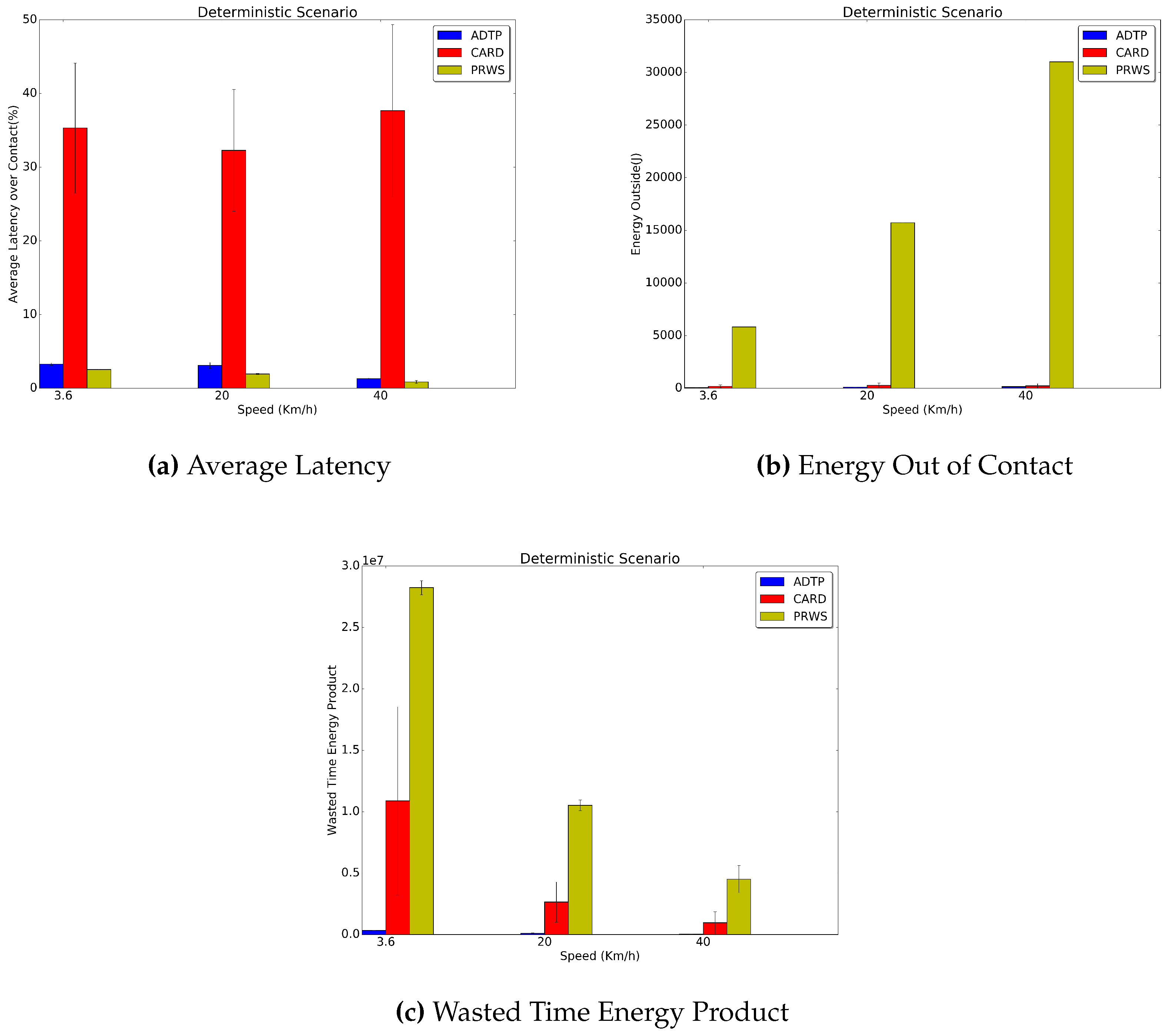
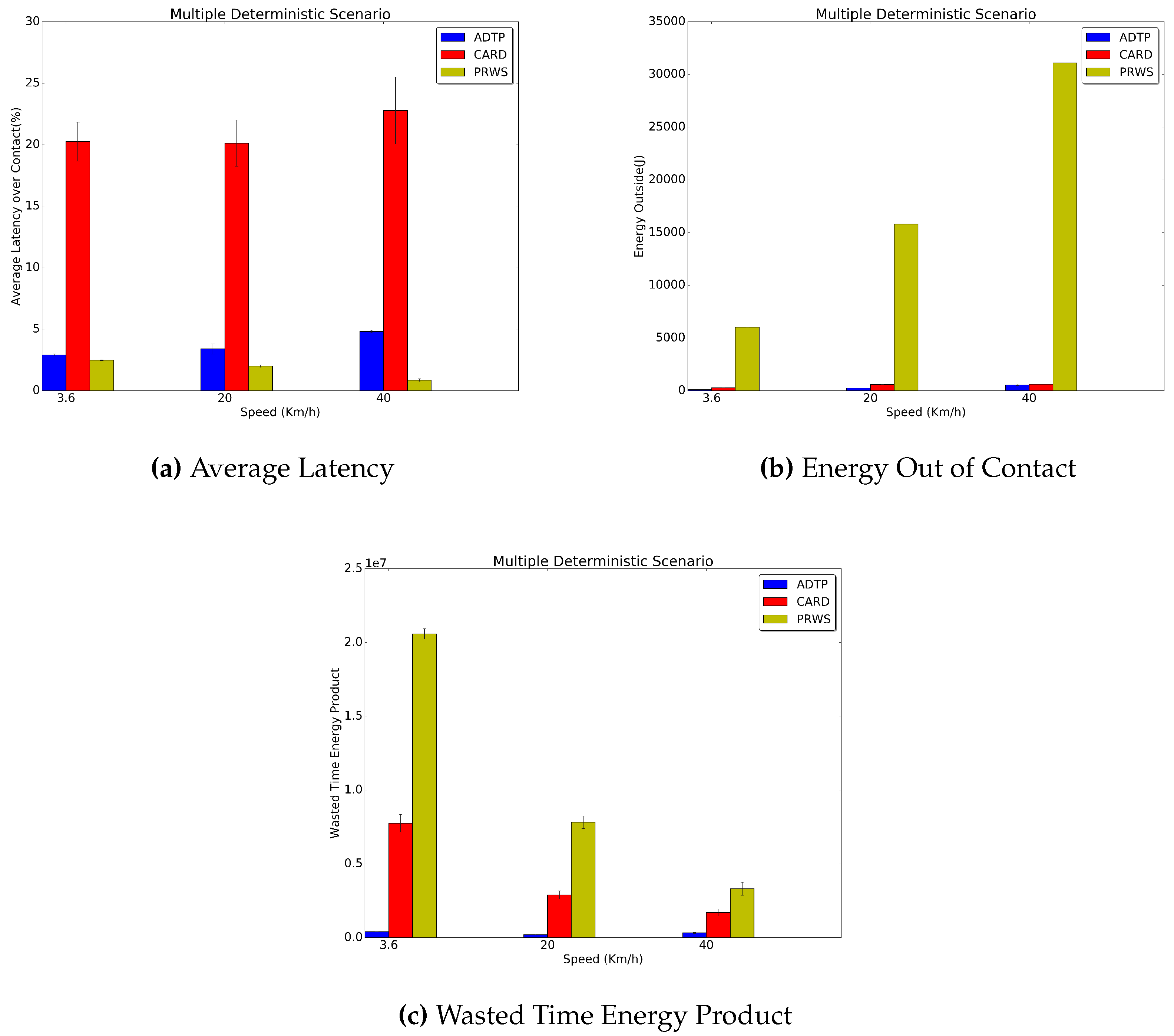
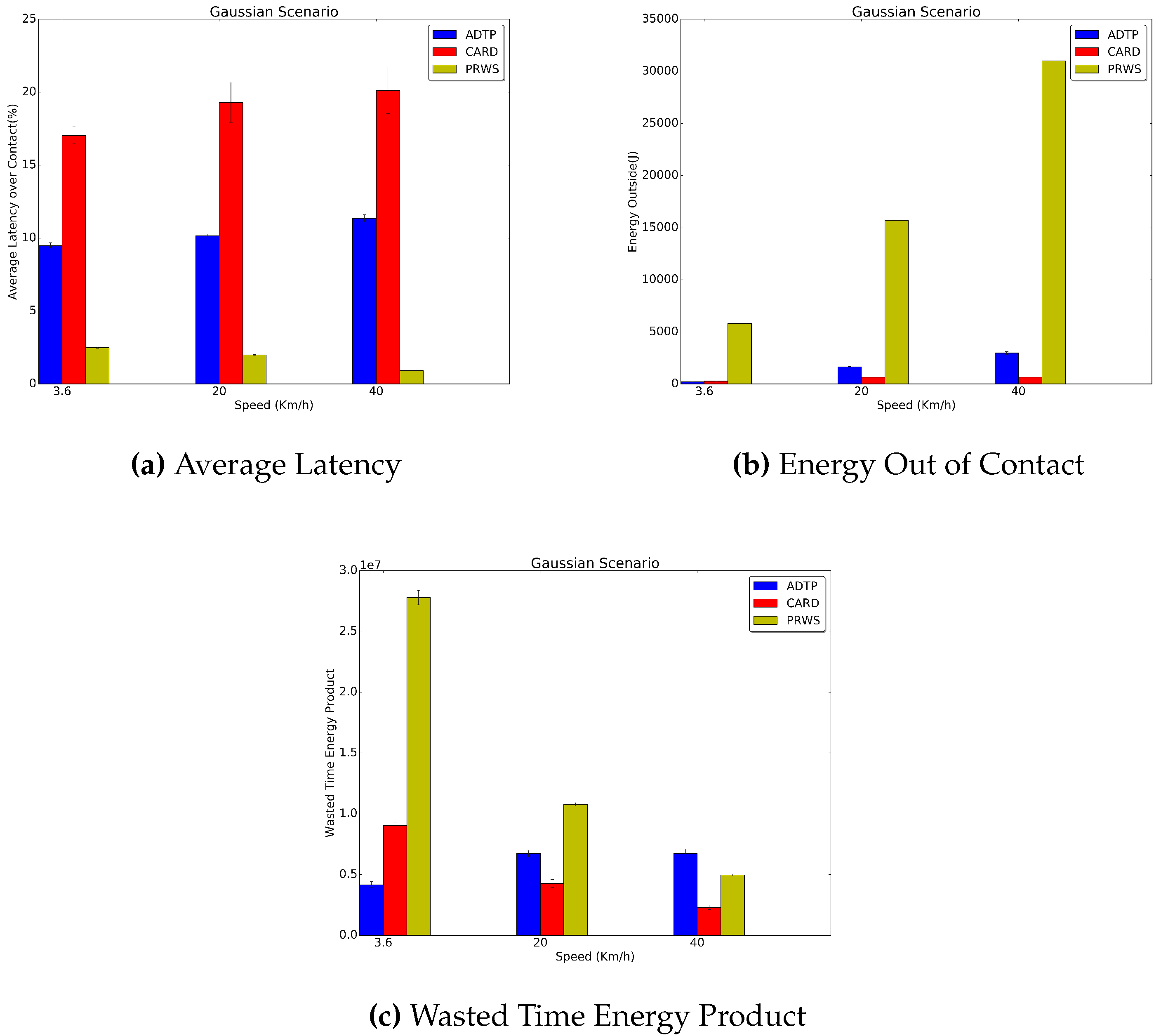
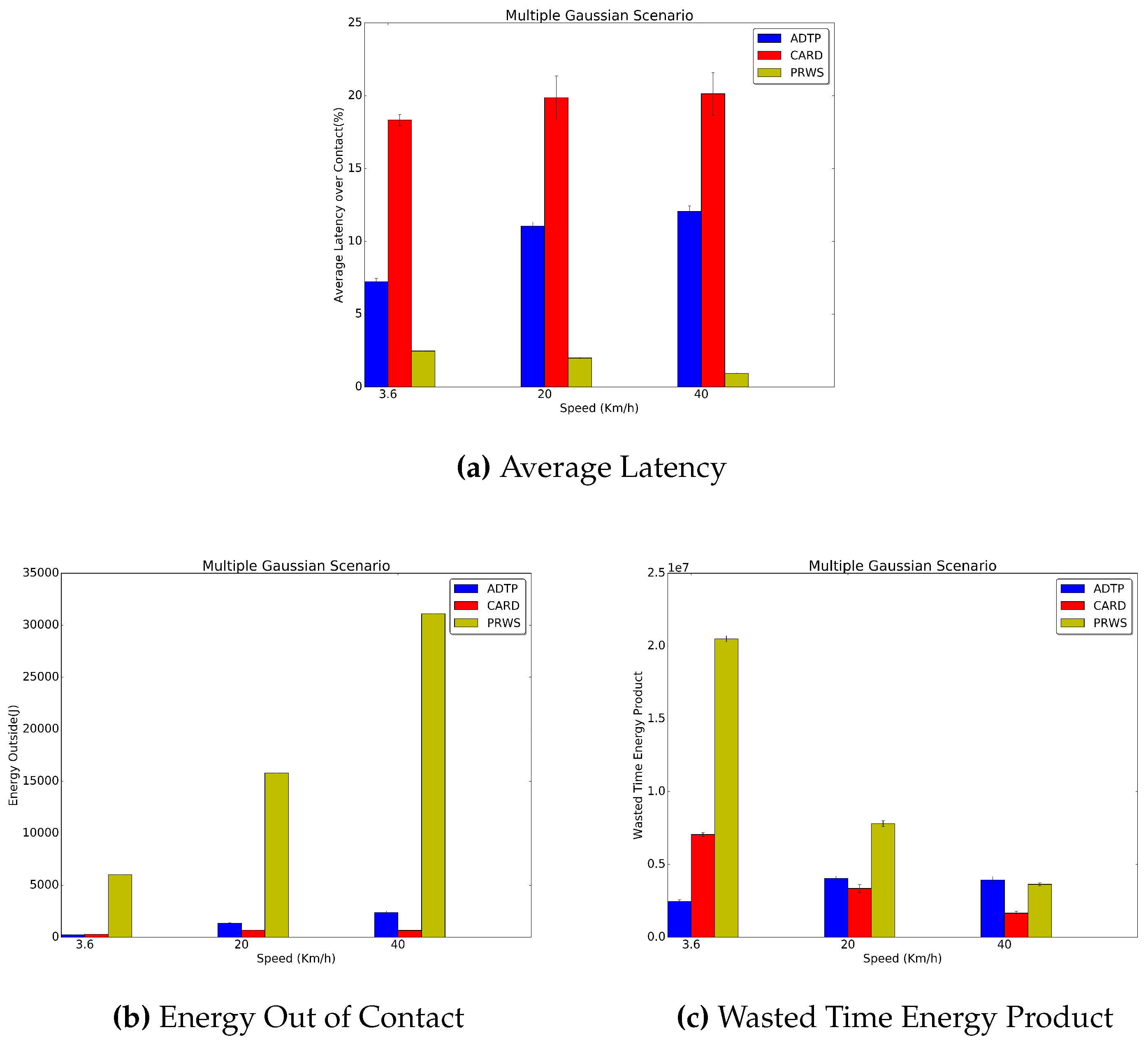
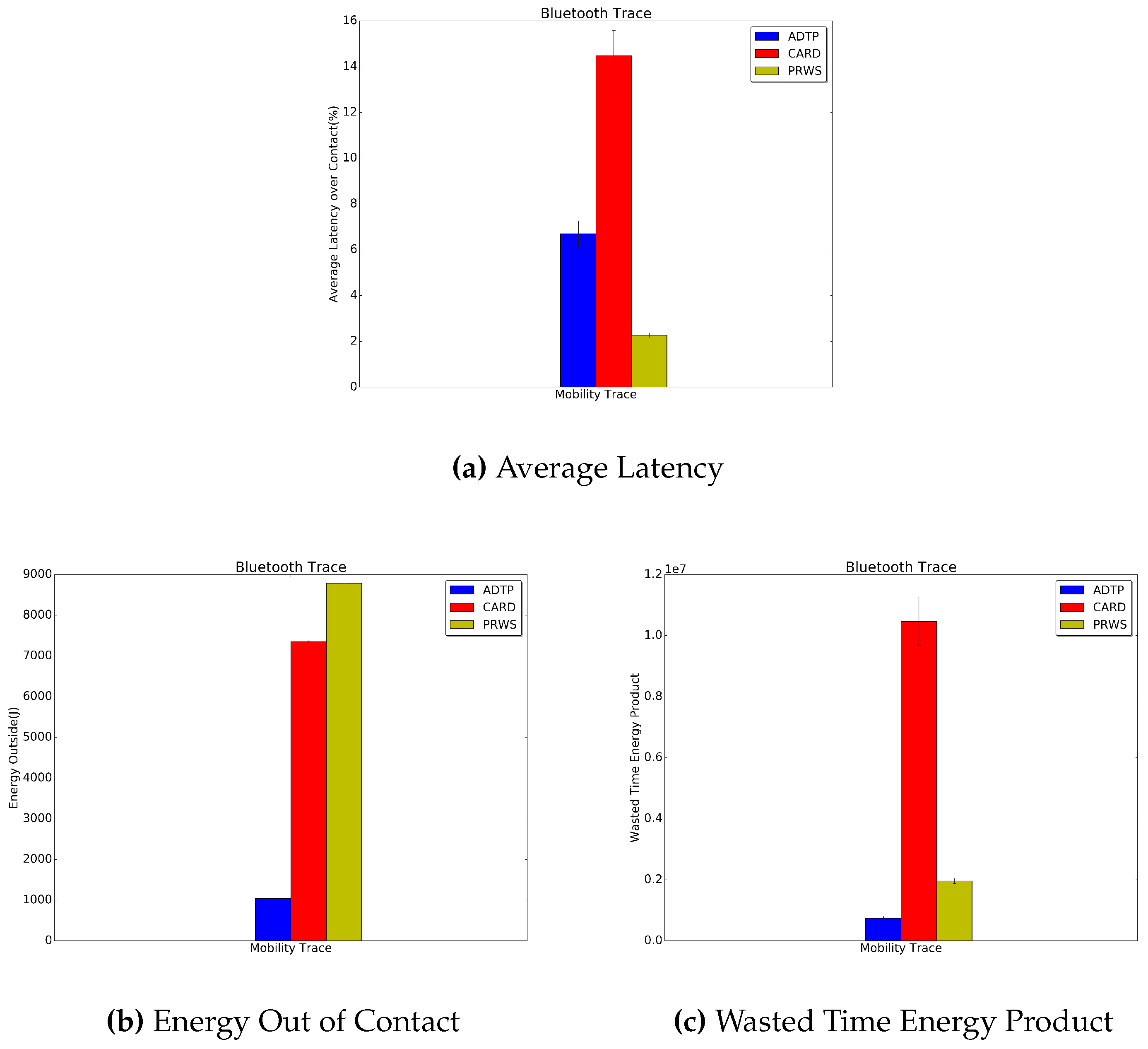
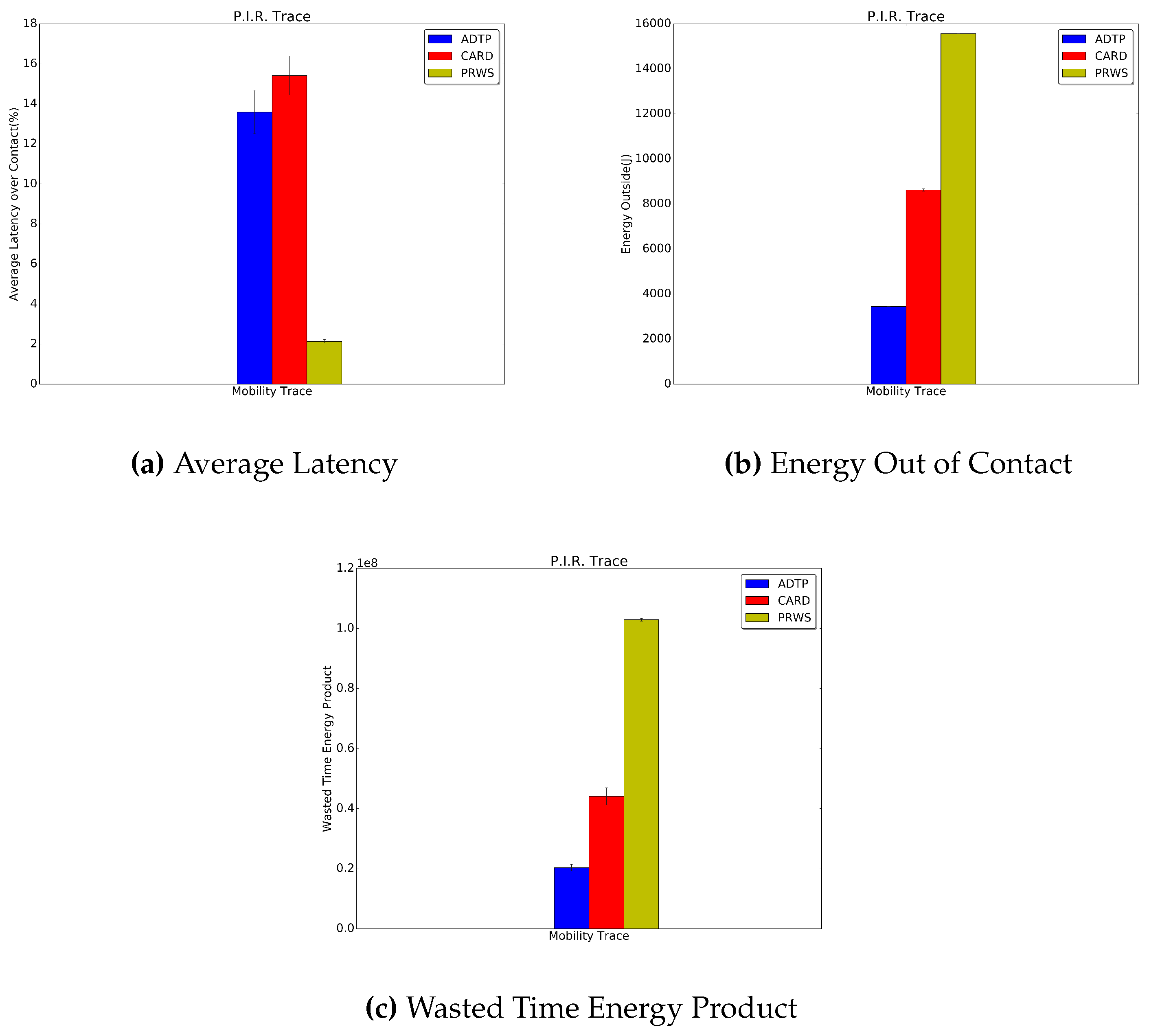
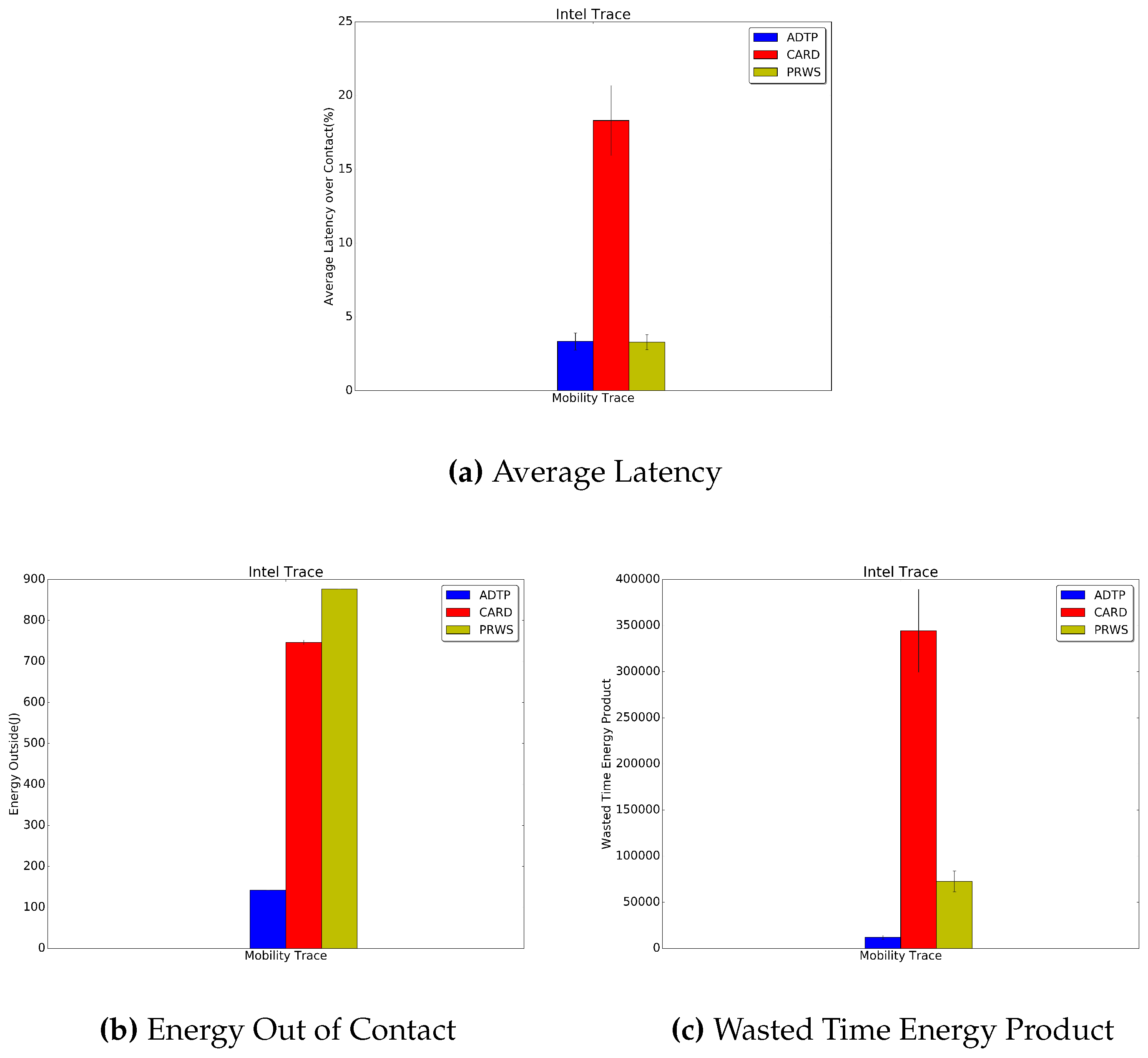
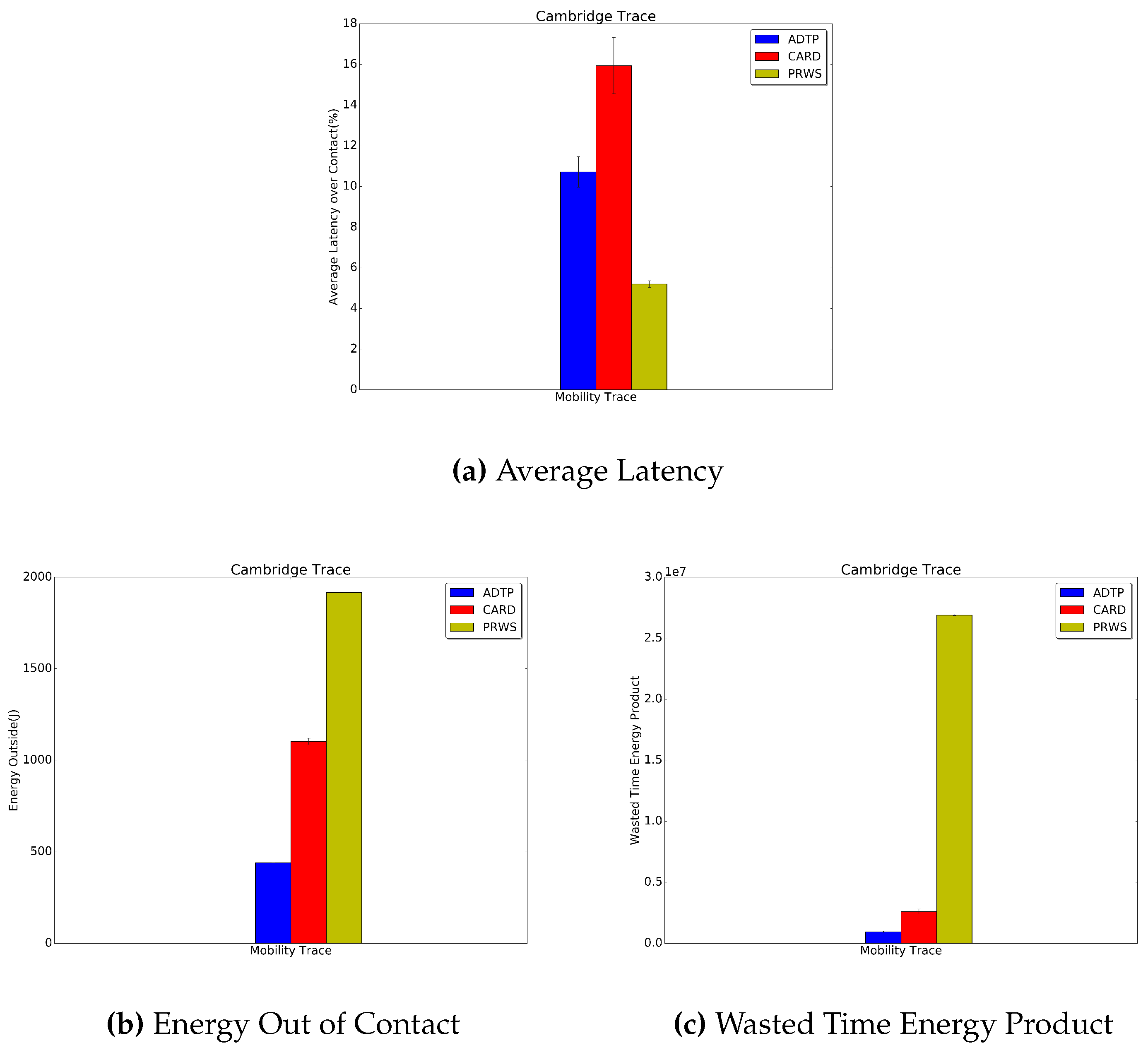
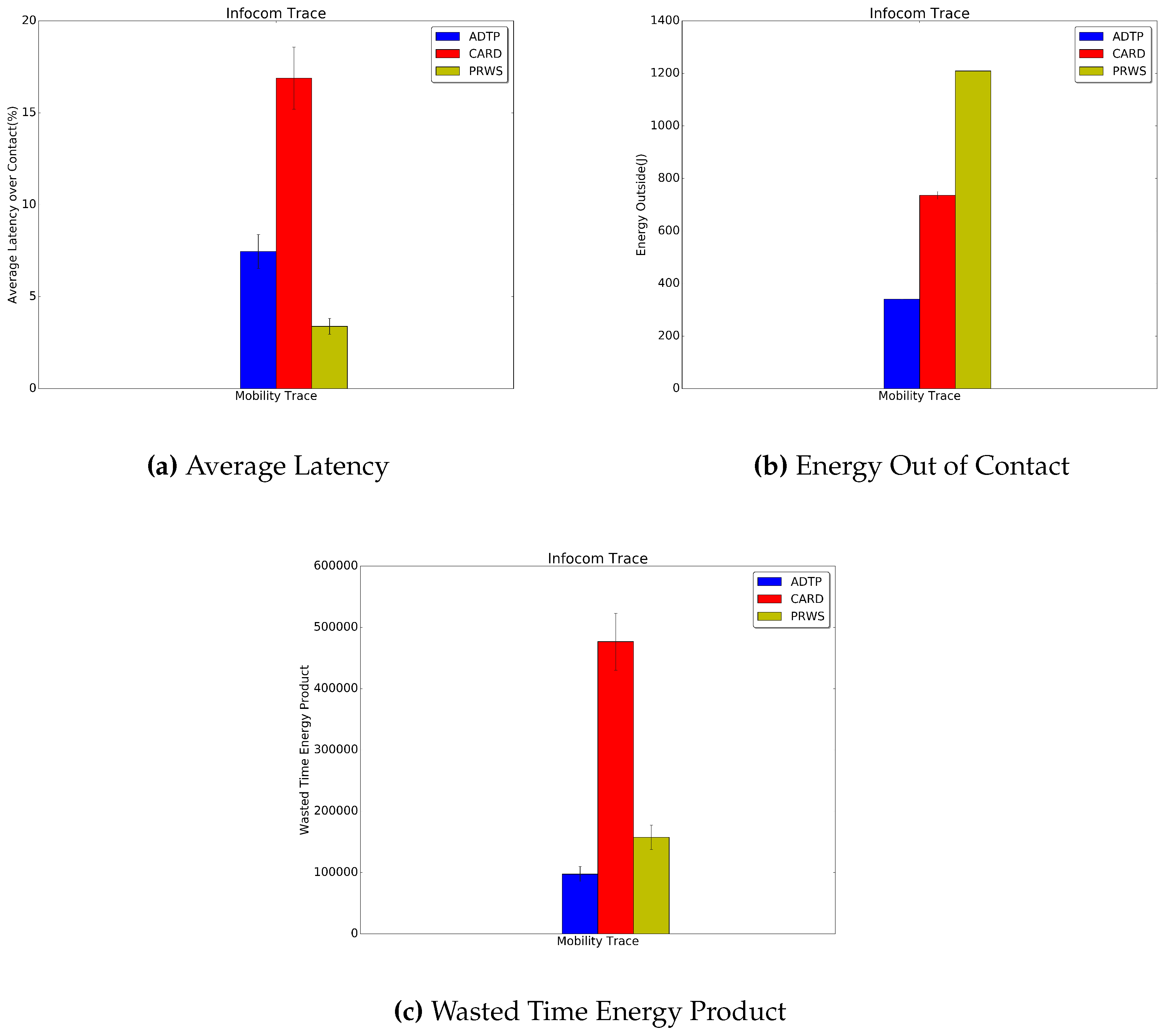
4.2. Planner and Scheduler Evaluation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Atzori, L.; Iera, A.; Morabito, G. The Internet of Things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- McKinsey Global Institute Report—Unlocking the potential of the Internet of Things. Available online: http://www.mckinsey.com/business-functions/business-technology/our-insights/the-internet-of-things-the-value-of-digitizing-the-physical-world (accessed on 21 October 2016).
- Stankovic, J.A. Research Directions for the Internet of Things. IEEE Int. Things J. 2014, 1, 3–9. [Google Scholar] [CrossRef]
- Miorandi, D.; Sicari, S.; Pellegrini, F.D.; Chlamtac, I. Internet of things: Vision, applications and research challenges. Ad Hoc Netw. 2012, 10, 1497–1516. [Google Scholar] [CrossRef]
- Zanella, A.; Bui, N.; Castellani, A.; Vangelista, L.; Zorzi, M. Internet of Things for Smart Cities. IEEE Int. Things J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Vlacheas, P.; Giaffreda, R.; Stavroulaki, V.; Kelaidonis, D.; Foteinos, V.; Poulios, G.; Demestichas, P.; Somov, A.; Biswas, A.R.; Moessner, K. Enabling smart cities through a cognitive management framework for the internet of things. IEEE Commun. Mag. 2013, 51, 102–111. [Google Scholar] [CrossRef]
- Conti, M.; Giordano, S. Mobile ad hoc networking: Milestones, challenges, and new research directions. IEEE Commun. Mag. 2014, 52, 85–96. [Google Scholar] [CrossRef]
- Grossglauser, M.; Tse, D. Mobility increases the capacity of ad hoc wireless networks. IEEE/ACM Trans. Netw. 2002, 10, 477–486. [Google Scholar] [CrossRef]
- Guo, B.; Zhang, D.; Wang, Z.; Yu, Z.; Zhou, X. Opportunistic IoT: Exploring the harmonious interaction between human and the internet of things. J. Netw. Comput. Appl. 2013, 36, 1531–1539. [Google Scholar] [CrossRef]
- Wirtz, H.; Rüth, J.; Serror, M.; Bitsch Link, J.A.; Wehrle, K. Opportunistic interaction in the challenged Internet of Things. In Proceedings of the 9th ACM MobiCom Workshop on Challenged Networks, Maui, HI, USA, 7–11 September 2014; ACM: New York, NY, USA, 2014; pp. 7–12. [Google Scholar]
- Pelusi, L.; Passarella, A.; Conti, M. Opportunistic networking: Data forwarding in disconnected mobile ad hoc networks. IEEE Commun. Mag. 2006, 44, 134–141. [Google Scholar] [CrossRef]
- Conti, M.; Giordano, S.; May, M.; Passarella, A. From opportunistic networks to opportunistic computing. IEEE Commun. Mag. 2010, 48, 126–139. [Google Scholar] [CrossRef]
- Pozza, R.; Nati, M.; Georgoulas, S.; Moessner, K.; Gluhak, A. Neighbor discovery for opportunistic networking in Internet of Things scenarios: A survey. IEEE Access 2015, 3, 1101–1131. [Google Scholar] [CrossRef]
- Gonzalez, M.C.; Hidalgo, C.A.; Barabasi, A.L. Understanding individual human mobility patterns. Nature 2008, 453, 779–782. [Google Scholar] [CrossRef] [PubMed]
- Song, C.; Qu, Z.; Blumm, N.; Barabasi, A.L. Limits of predictability in human mobility. Science 2010, 327, 1018–1021. [Google Scholar] [CrossRef] [PubMed]
- Hasan, S.; Schneider, C.M.; Ukkusuri, S.V.; González, M.C. Spatiotemporal patterns of urban human mobility. J. Stat. Phys. 2013, 151, 304–318. [Google Scholar] [CrossRef]
- Guo, B.; Wang, Z.; Yu, Z.; Wang, Y.; Yen, N.Y.; Huang, R.; Zhou, X. Mobile crowd sensing and computing: The review of an emerging human-powered sensing paradigm. ACM Comput. Surv. 2015, 48, 7. [Google Scholar] [CrossRef]
- EU FP7 IoTLab Project. Available online: http://www.iotlab.eu/ (accessed on 21 October 2016).
- Dyo, V.; Mascolo, C. Efficient node discovery in mobile wireless sensor networks. In Proceedings of the 4th IEEE International Conference on Distributed Computing in Sensor Systems, Santorini Island, Greece, 11–14 June 2008.
- Shah, K.; Di Francesco, M.; Anastasi, G.; Kumar, M. A framework for resource-aware data accumulation in sparse wireless sensor networks. Comput. Commun. 2011, 34, 2094–2103. [Google Scholar] [CrossRef]
- Pozza, R.; Nati, M.; Georgoulas, S.; Gluhak, A.; Moessner, K.; Krco, S. CARD: Context-Aware Resource Discovery for mobile Internet of Things scenarios. In Proceedings of the IEEE 15th International Symposium on a World of Wireless, Mobile and Multimedia Networks, Sydney, Australia, 16–19 June 2014.
- Wang, W.; Motani, M.; Srinivasan, V. Opportunistic energy-efficient contact probing in delay-tolerant applications. IEEE/ACM Trans. Netw. 2009, 17, 1592–1605. [Google Scholar] [CrossRef]
- Gao, W.; Li, Q. Wakeup scheduling for energy-efficient communication in opportunistic mobile networks. In Proceedings of the 32nd IEEE International Conference on Computer Communications, INFOCOM 2013, Turin, Italy, 14–19 April 2013.
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction (Adaptive Computation and Machine Learning); A Bradford Book; MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Wiering, M.; van Otterlo, M. Adaptation, Learning, and Optimization. In Reinforcement Learning State-of-the-Art; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Kumar, P.; Morawska, L.; Martani, C.; Biskos, G.; Neophytou, M.; Sabatino, S.D.; Bell, M.; Norford, L.; Britter, R. The rise of low-cost sensing for managing air pollution in cities. Environ. Int. 2015, 75, 199–205. [Google Scholar] [CrossRef] [PubMed]
- Bonola, M.; Bracciale, L.; Loreti, P.; Amici, R.; Rabuffi, A.; Bianchi, G. Opportunistic communication in smart city: Experimental insight with small-scale taxi fleets as data carriers. Ad Hoc Netw. 2016, 43, 43–55. [Google Scholar] [CrossRef]
- Drula, C.; Amza, C.; Rousseau, F.; Duda, A. Adaptive energy conserving algorithms for neighbor discovery in opportunistic Bluetooth networks. IEEE J. Sel. Areas Commun. 2007, 25, 96–107. [Google Scholar] [CrossRef]
- Choi, B.J.; Shen, X. Adaptive exponential beacon period protocol for power saving in delay tolerant networks. In Proceedings of the IEEE International Conference on Communications, Dresden, Germany, 14–18 June 2009.
- Han, B.; Srinivasan, A. eDiscovery: Energy Efficient Device Discovery for Mobile Opportunistic Communications. In Proceedings of the 20th IEEE International Conference on Network Protocols, Austin, TX, USA, 30 October–2 November 2012.
- Zhou, H.; Zhao, H.; Liu, C.; Chen, J. Adaptive working schedule for duty-cycle opportunistic mobile networks. In Proceedings of the IEEE International Conference on Communications, Budapest, Hungary, 9–13 June 2013.
- Jeong, J.; Yi, Y.; woo Cho, J.; Eun, D.Y.; Chong, S. Wi-Fi sensing: Should mobiles sleep longer as they age? In Proceedings of the 32nd IEEE International Conference on Computer Communications, INFOCOM, 2013, Turin, Italy, 14–19 April 2013.
- Chakrabarti, A.; Sabharwal, A.; Aazhang, B. Using predictable observer mobility for power efficient design of sensor networks. In Proceedings of the 2nd ACM/IEEE International Conference on Information Processing in Sensor Networks, Palo Alto, CA, USA, 22–23 April 2003; Springer: Berlin/Heidelberg, Germany, 2003; pp. 129–145. [Google Scholar]
- Jun, H.; Ammar, M.; Zegura, E. Power management in delay tolerant networks: A framework and knowledge-based mechanisms. In Proceedings of the 2nd Annual IEEE Communications Society Conference on Sensor and Ad Hoc Communications and Networks, Santa Clara, CA, USA, 26–29 September 2005.
- Jun, H.; Ammar, M.H.; Corner, M.D.; Zegura, E.W. Hierarchical power management in disruption tolerant networks using traffic-aware optimization. Comput. Commun. 2009, 32, 1710–1723. [Google Scholar] [CrossRef]
- Wu, X.; Brown, K.; Sreenan, C. Exploiting rush hours for energy-efficient contact probing in opportunistic data collection. In Proceedings of the 31st International Conference on Distributed Computing Systems Workshops, Minneapolis, MN, USA, 20–24 June 2011.
- Kondepu, K.; Restuccia, F.; Anastasi, G.; Conti, M. A hybrid and flexible discovery algorithm for wireless sensor networks with mobile elements. In Proceedings of the IEEE Symposium on Computers and Communications, Cappadocia, Turkey, 1–4 July 2012.
- Zhang, B.; Li, Y.; Jin, D.; Hui, P. Adaptive wakeup scheduling based on power-law distributed contacts in delay tolerant networks. In Proceedings of the IEEE International Conference on Communications, Sydney, Australia, 10–14 June 2014.
- Watkins, C.; Dayan, P. Technical Note: Q-Learning. Mach. Learn. 1992, 8, 279–292. [Google Scholar] [CrossRef]
- Sutton, R. Learning to predict by the methods of temporal differences. Mach. Learn. 1988, 3, 9–44. [Google Scholar] [CrossRef]
- Boyan, J.A. Least-squares temporal difference learning. In Proceedings of the 16th International Conference on Machine Learning, Bled, Slovenia, 27–30 June 1999; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1999; pp. 49–56. [Google Scholar]
- Lagoudakis, M.G.; Parr, R.; Littman, M.L. Least-squares methods in reinforcement learning for control. In Proceedings of the 2nd Hellenic Conference on Artificial Intelligence, Thessaloniki, Greece, 11–12 April 2002; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Dutta, P.; Culler, D. Practical asynchronous neighbor discovery and rendezvous for mobile sensing applications. In Proceedings of the 6th ACM Conference on Embedded Networked Sensor Systems, Raleigh, NC, USA, 5–7 November 2008; ACM: New York, NY, USA, 2008; pp. 71–84. [Google Scholar]
- Python-Based Reinforcement Learning, Artificial Intelligence and Neural Network Library (PyBrain). Available online: http://pybrain.org/ (accessed on 21 October 2016).
- Nati, M.; Gluhak, A.; Martelli, F.; Verdone, R. Measuring and understanding opportunistic co-presence patterns in smart office spaces. In Proceedings of the Green Computing and Communications (GreenCom), 2013 IEEE and Internet of Things (iThings/CPSCom), IEEE International Conference on and IEEE Cyber, Physical and Social Computing, Beijing, China, 20–23 August 2013.
- Scott, J.; Gass, R.; Crowcroft, J.; Hui, P.; Diot, C.; Chaintreau, A. CRAWDAD data set cambridge/haggle (v. 2006-01-31). Available online: http://crawdad.org/cambridge/haggle/ (accessed on 21 October 2016).
- NS-3 Network Simulator. Available online: http://www.nsnam.org/ (accessed on 21 October 2016).
- CC2420 Single-Chip 2.4 GHz IEEE 802.15.4 Compliant and ZigBee Ready RF Transceiver. Available online: http://www.ti.com/product/cc2420 (accessed on 21 October 2016).
- Stoffers, M.; Riley, G. Comparing the ns-3 propagation models. In Proceedings of the IEEE the 20th International Symposium on Modeling, Analysis, and Simulation of Computer and Telecommunication Systems, Washington DC, WA, USA, 7–9 August 2012.
- Armadillo C++ Linear Algebra Library. Available online: http://arma.sourceforge.net/ (accessed on 21 October 2016).
- Abrahams, D.; Gurtovoy, A. C++ Template Metaprogramming: Concepts, Tools, and Techniques from Boost and Beyond; Addison-Wesley Professional: Boston, MA, USA, 2004. [Google Scholar]
- Tange, O. Gnu parallel - the command-line power tool. USENIX Mag. 2011, 36, 42–47. [Google Scholar]
- Asadpour, M.; den Bergh, B.V.; Giustiniano, D.; Hummel, K.A.; Pollin, S.; Plattner, B. Micro aerial vehicle networks: An experimental analysis of challenges and opportunities. IEEE Commun. Mag. 2014, 52, 141–149. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Traces | (%) | (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 m | 5 m | 10 m | 15 m | 1 m | 5 m | 10 m | 15 m | ||
| Deterministic | 99.79 | 99.79 | 99.79 | 99.79 | 99.79 | 99.79 | 99.79 | 99.79 | |
| Multiple Deterministic | 96.38 | 98.41 | 98.55 | 99.13 | 96.38 | 98.41 | 98.55 | 99.13 | |
| Gaussian | 9.90 | 46.15 | 76.46 | 91.67 | 9.69 | 46.35 | 76.35 | 91.56 | |
| Multiple Gaussian | 8.41 | 47.68 | 78.84 | 94.06 | 8.41 | 47.68 | 78.84 | 94.06 | |
| Bluetooth | 30.73 | 82.48 | 90.92 | 93.47 | 29.30 | 82.01 | 91.88 | 93.95 | |
| P.I.R. | 4.95 | 23.00 | 48.88 | 67.41 | 3.51 | 24.44 | 48.72 | 67.25 | |
| Intel | 5.71 | 25.71 | 57.14 | 77.14 | 5.71 | 31.43 | 60.00 | 77.14 | |
| Cambridge | 3.85 | 26.15 | 57.69 | 67.69 | 6.15 | 30.00 | 55.38 | 71.54 | |
| Infocom | 11.11 | 31.11 | 44.44 | 51.11 | 11.11 | 37.78 | 46.67 | 55.56 | |
| Traces | (%) | (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 m | 5 m | 10 m | 15 m | 1 m | 5 m | 10 m | 15 m | ||
| Deterministic | 95.73 | 95.73 | 95.73 | 95.73 | 95.73 | 95.73 | 95.73 | 95.73 | |
| Multiple Deterministic | 91.88 | 92.75 | 94.06 | 94.06 | 91.88 | 92.75 | 94.06 | 94.06 | |
| Gaussian | 7.92 | 36.67 | 66.77 | 83.54 | 7.92 | 36.56 | 66.56 | 83.54 | |
| Multiple Gaussian | 8.70 | 39.13 | 64.78 | 82.17 | 8.70 | 39.13 | 64.78 | 82.17 | |
| Bluetooth | 15.45 | 67.04 | 81.69 | 86.46 | 16.72 | 66.72 | 82.17 | 87.58 | |
| P.I.R. | 3.04 | 14.86 | 29.07 | 39.62 | 4.31 | 14.70 | 29.23 | 39.94 | |
| Intel | 2.86 | 11.43 | 25.71 | 40.00 | 2.86 | 11.43 | 25.71 | 40.00 | |
| Cambridge | 3.08 | 13.85 | 30.00 | 47.69 | 3.85 | 13.08 | 29.23 | 46.92 | |
| Infocom | 4.44 | 20.00 | 33.33 | 40.00 | 4.44 | 24.44 | 37.78 | 42.22 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pozza, R.; Georgoulas, S.; Moessner, K.; Nati, M.; Gluhak, A.; Krco, S. An Arrival and Departure Time Predictor for Scheduling Communication in Opportunistic IoT. Sensors 2016, 16, 1852. https://doi.org/10.3390/s16111852
Pozza R, Georgoulas S, Moessner K, Nati M, Gluhak A, Krco S. An Arrival and Departure Time Predictor for Scheduling Communication in Opportunistic IoT. Sensors. 2016; 16(11):1852. https://doi.org/10.3390/s16111852
Chicago/Turabian StylePozza, Riccardo, Stylianos Georgoulas, Klaus Moessner, Michele Nati, Alexander Gluhak, and Srdjan Krco. 2016. "An Arrival and Departure Time Predictor for Scheduling Communication in Opportunistic IoT" Sensors 16, no. 11: 1852. https://doi.org/10.3390/s16111852