
Validation and Parameter Sensitivity Tests for Reconstructing Swell Field Based on an Ensemble Kalman Filter


Abstract
:1. Introduction
2. Data
2.1. Buoy Data
2.2. SAR Data
2.3. ECMWF Data
3. Method
3.1. Ensemble Kalman Filter (EnKF)
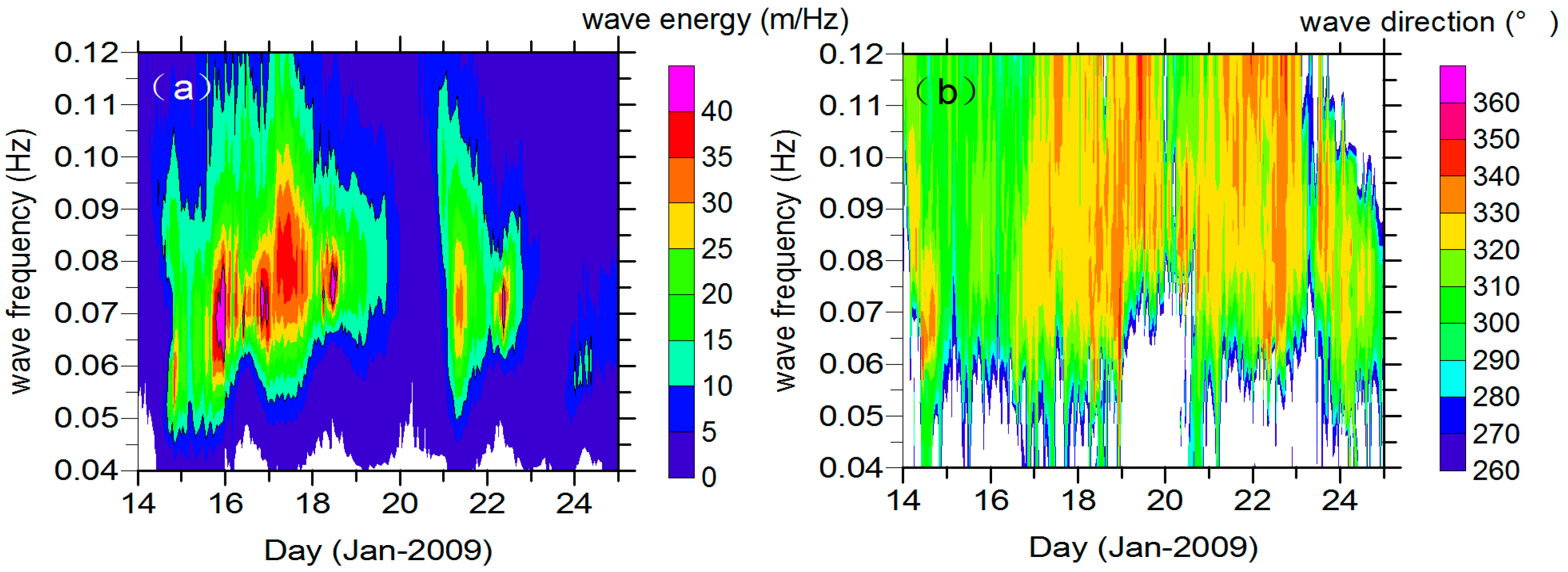
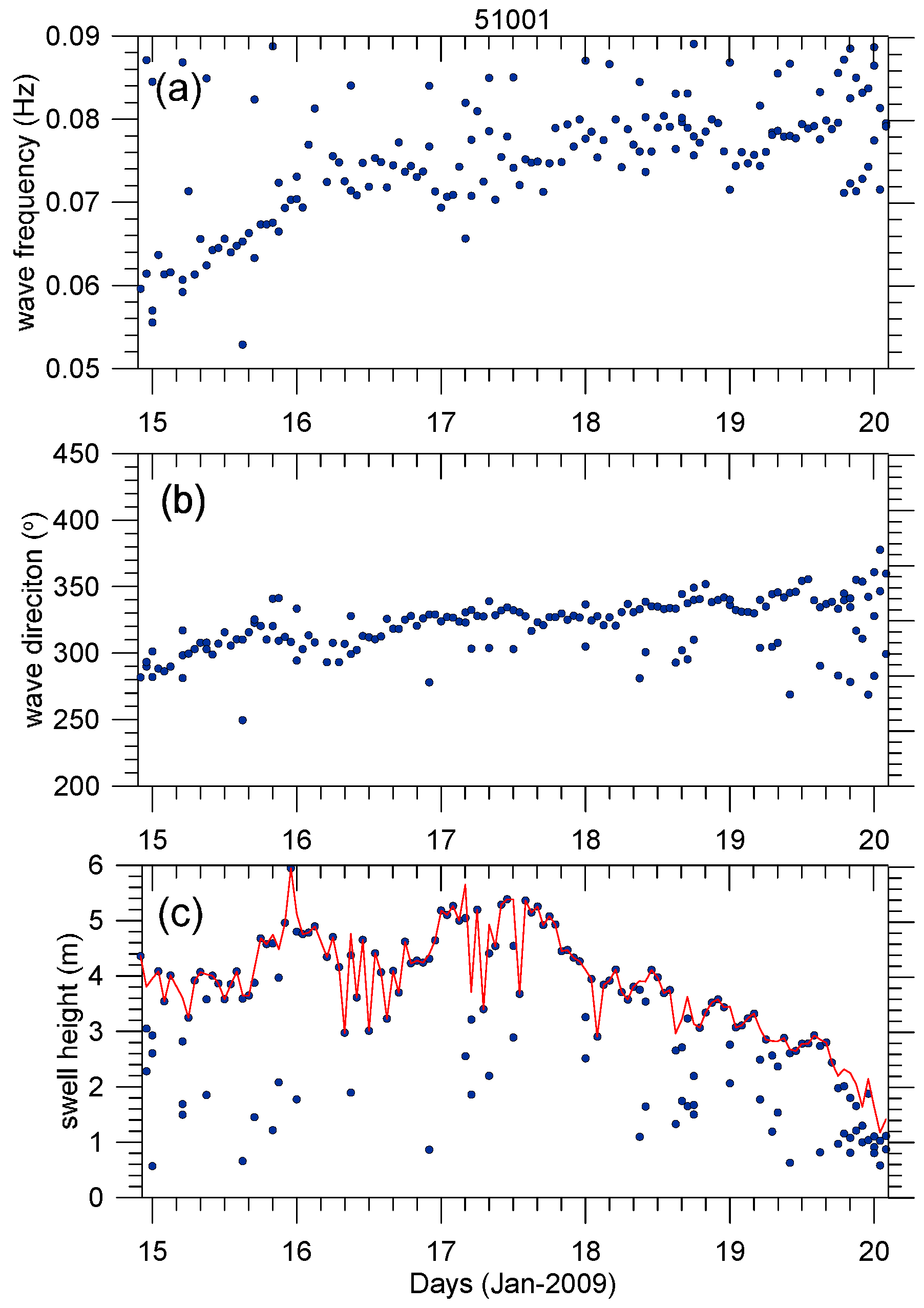
3.2. Swell Tracking from Buoy Data
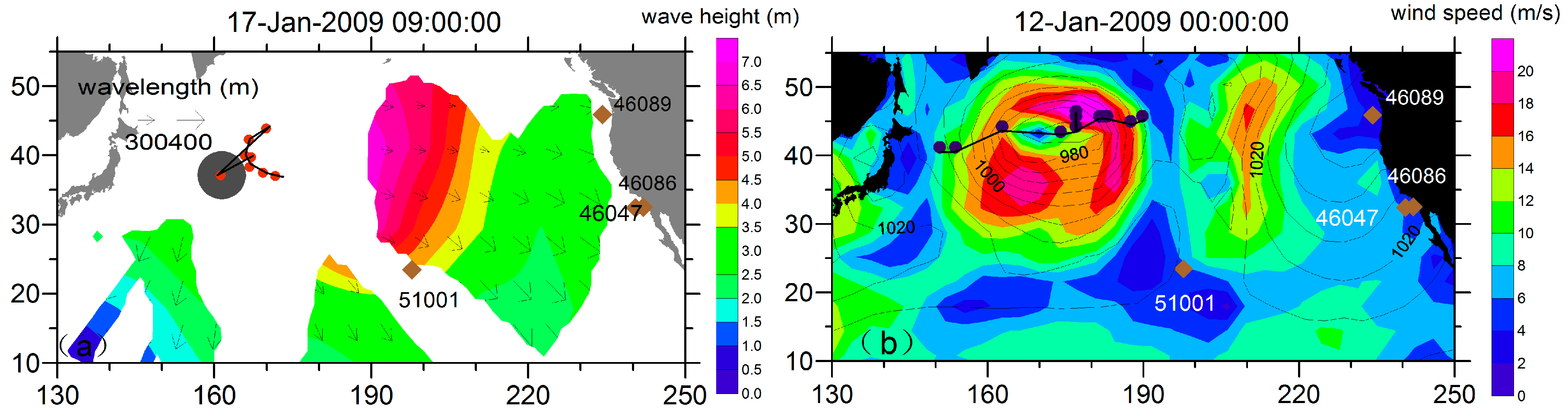
4. Case Study
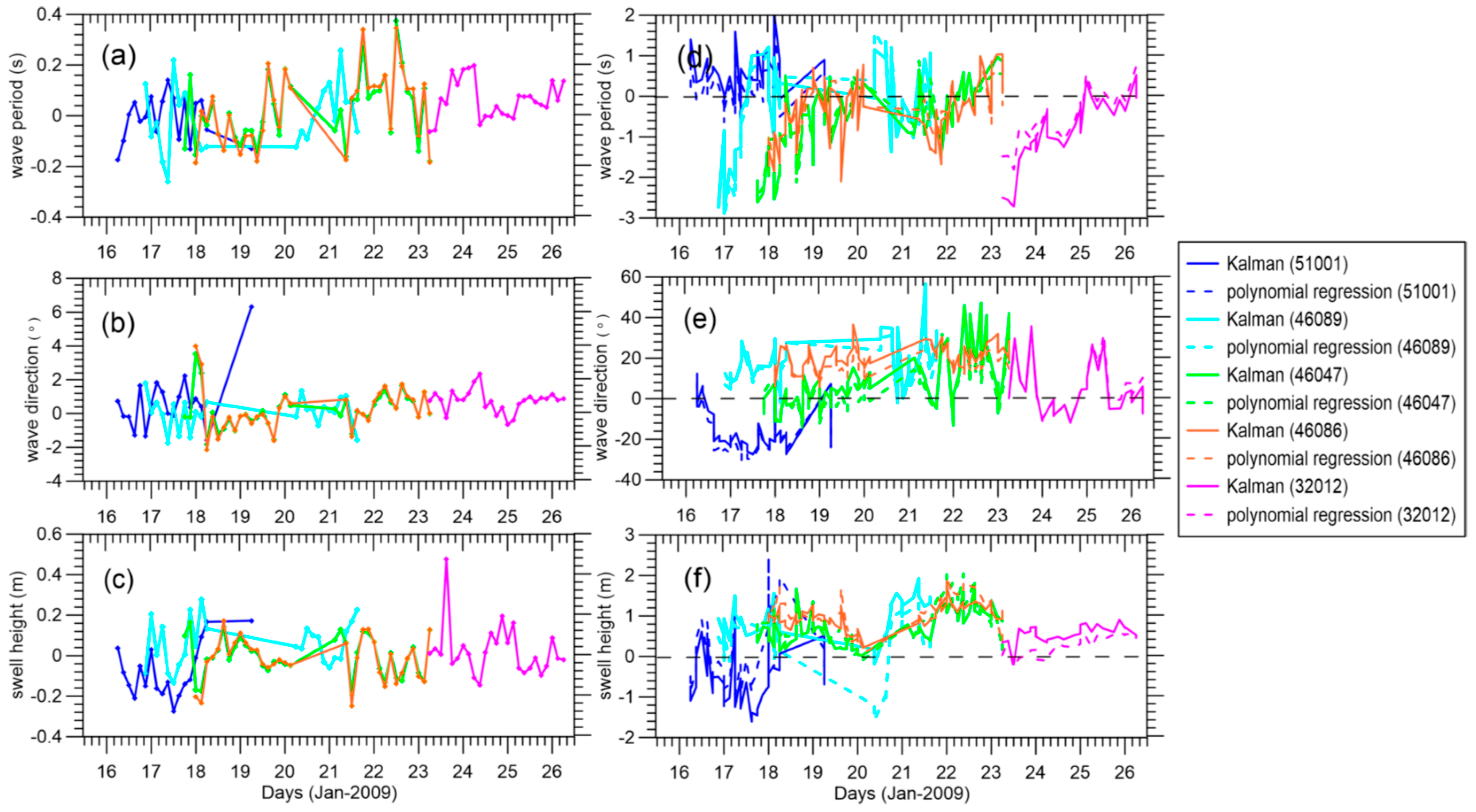
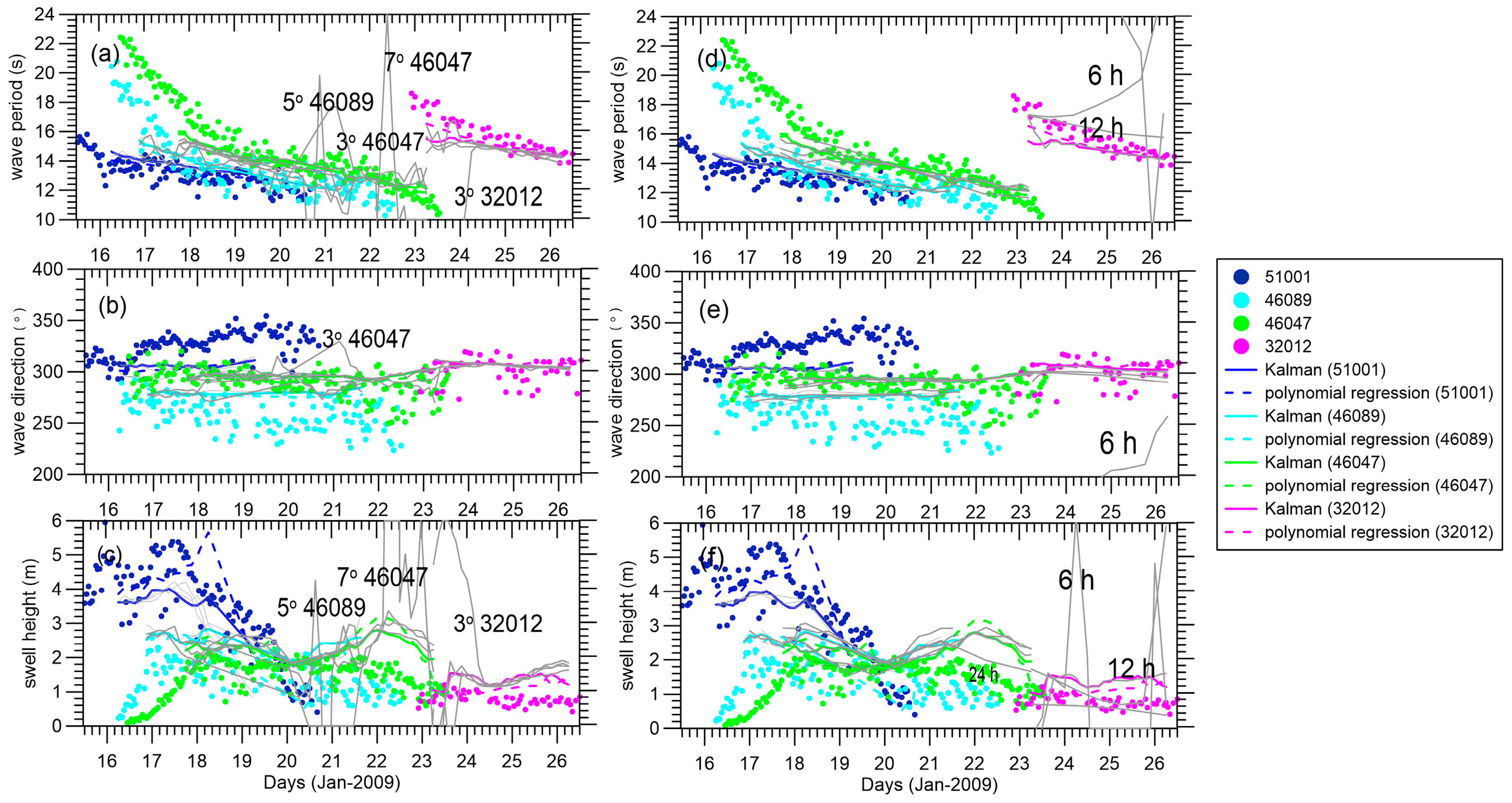
4.1. Comparison of Swell Integral Parameter Estimation
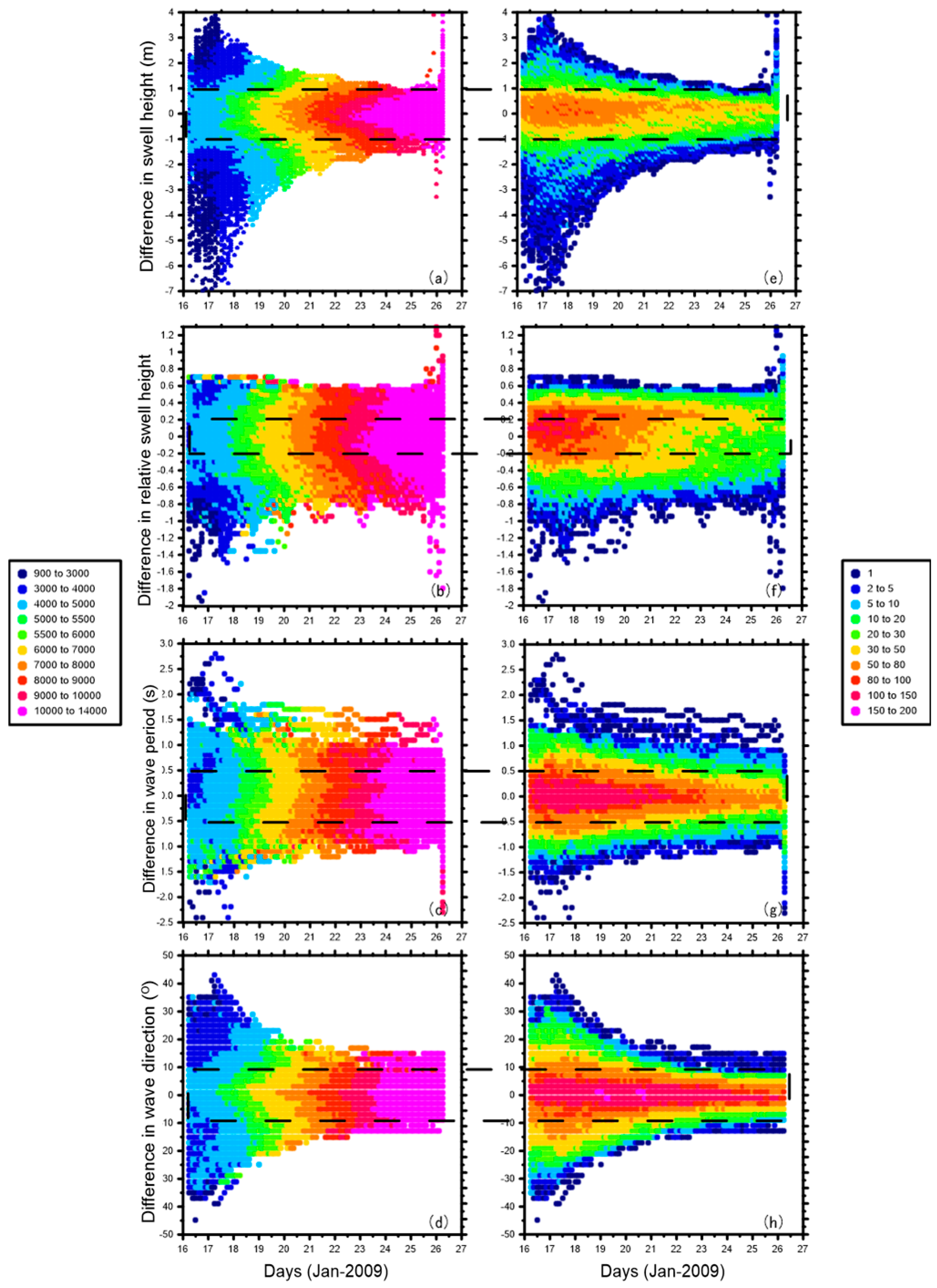
4.2. Parameter Sensitivity Test
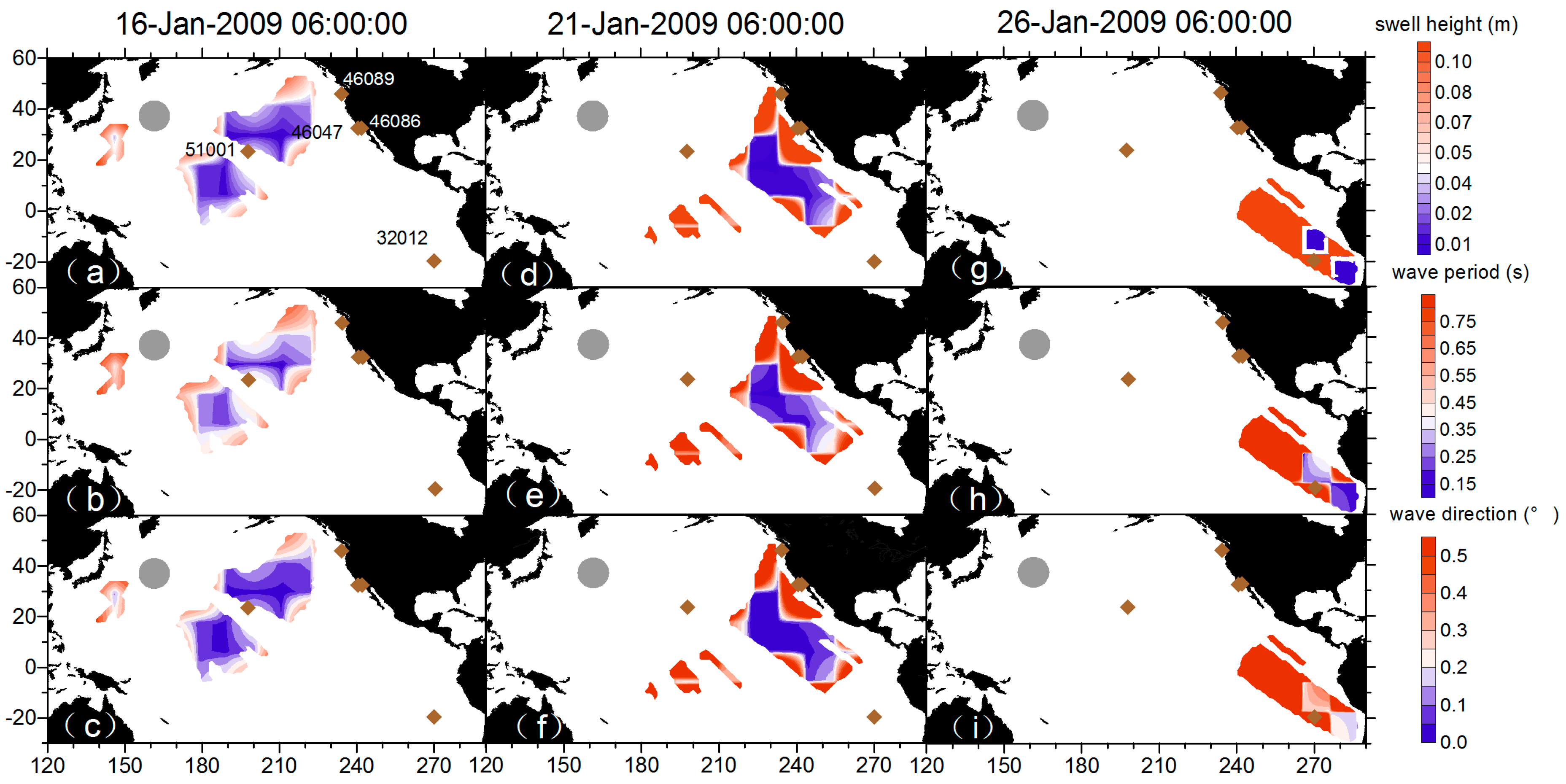
4.3. EnKF Results on Temporal Evolution Field
5. Summary and Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Munk, W.H.; Miller, G.R.; Snodgrass, F.E.; Barber, N.F. Directional recording of swell from distant storms. Philos. Trans. R. Soc. Lond. A 1963, 255, 505–584. [Google Scholar] [CrossRef]
- Snodgrass, F.E.; Groves, G.W.; Hasselmann, K.F.; Miller, G.R.; Munk, W.H.; Powers, W.H. Propagation of ocean swell across the Pacific. Philos. Trans. R. Soc. Lond. A 1966, 259, 431–497. [Google Scholar] [CrossRef]
- Chen, G.; Chapron, B.; Ezraty, R.; Vandemark, D. A global view of swell and wind sea climate in the ocean by satellite altimeter and scatterometer. J. Atmos. Ocean. Technol. 2002, 19, 1849–1859. [Google Scholar] [CrossRef]
- Collard, F.; Ardhuin, F.; Chapron, B. Monitoring and analysis of ocean swell fields from space: New methods for routine observations. J. Geophys. Res. 2009, 114, 1748–1755. [Google Scholar] [CrossRef]
- Ardhuin, F.; Chapron, B.; Collard, F. Observation of swell dissipation across oceans. Geophys. Res. Lett. 2009, 36, 150–164. [Google Scholar] [CrossRef]
- Jiang, H.; Stopa, J.E.; Wang, H.; Husson, R.; Mouche, A.; Chapron, B.; Chen, G. Tracking the attenuation and nonbreaking dissipation of swells using altimeters. J. Geophys. Res. 2016. [Google Scholar] [CrossRef]
- Stopa, J.E.; Ardhuin, F.; Husson, R.; Jiang, H.; Chapron, B.; Collard, F. Swell dissipation from 10 years of Envisat advanced synthetic aperture radar in wave mode. Geophys. Res. Lett. 2016, 43, 3423–3430. [Google Scholar] [CrossRef]
- Hasselmann, S.; Lionello, P.; Hasselmann, K. An optimal interpolation scheme for the assimilation of spectral wave data. J. Geophys. Res. 1997, 102, 15823–15836. [Google Scholar] [CrossRef]
- Breivik, L.A.; Reistad, M.; Schyberg, H.; Sunde, J.; Krogstad, H.E.; Johnsen, H. Assimilation of ERS SAR wave spectra in an operational wave model. J. Geophys. Res. 1998, 103, 7887–7900. [Google Scholar] [CrossRef]
- Heimbach, P.; Hasselmann, S.; Hasselmann, K. Statistical analysis and intercomparison of WAM model data with global ERS-1 SAR wave mode spectral retrievals over 3 years. J. Geophys. Res. 1998, 103, 7931–7977. [Google Scholar] [CrossRef]
- Abdalla, S.; Bidlot, J.R.; Janssen, P. Assimilation of ERS and Envisat Wave Data at ECMWF. In Proceedings of the 2004 Envisat & ERS Symposium (ESA SP-572), Salzburg, Austria, 6–10 September 2004.
- Abdalla, S.; Janssen, P.; Bidlot, J.R. Jason-2 OGDR wind and wave products: Monitoring, validation and assimilation. Mar. Geod. 2010, 33, 239–255. [Google Scholar] [CrossRef]
- Stopa, J.E.; Ardhuin, F.; Babanin, A.; Zieger, S. Comparison and validation of physical wave parameterizations in spectral wave models. Ocean Model. 2015. [Google Scholar] [CrossRef]
- Högström, U.; Rutgersson, A.; Sahlée, E.; Smedman, A.S.; Hristov, T.S.; Drennan, W.M.; Kahma, K.K. Air–Sea Interaction Features in the Baltic Sea and at a Pacific Trade-Wind Site: An Inter-comparison Study. Bound Lay Meteorol. 2013, 147, 139–163. [Google Scholar] [CrossRef]
- Hanley, K.E.; Belcher, S.E.; Sullivan, P.P. A global climatology of wind–wave interaction. J. Phys. Oceanogr. 2010, 40, 1263–1282. [Google Scholar] [CrossRef]
- Semedo, A.; Sušelj, K.; Rutgersson, A.; Sterl, A. A Global View on the Wind Sea and Swell Climate and Variability from ERA-40. J. Clim. 2011, 24, 1461–1479. [Google Scholar] [CrossRef]
- Evensen, G. Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics. J. Geophys. Res. 1994, 99, 10143–10162. [Google Scholar] [CrossRef]
- Hamill, T.M.; Whitaker, J.S. Accounting for the Error due to Unresolved Scales in Ensemble Data Assimilation: A Comparison of Different Approaches. Mon. Weather Rev. 2005, 133, 3132–3147. [Google Scholar] [CrossRef]
- Kang, J.S.; Kalnay, E.; Liu, J.; Fung, I.; Miyoshi, T.; Ide, K. “Variable localization” in an ensemble Kalman filter: Application to the carbon cycle data assimilation. J. Geophys. Res. 2011, 116. [Google Scholar] [CrossRef]
- Wang, Y.; Counillon, F.; Bertino, L. Alleviating the bias induced by the linear analysis update with an isopycnal ocean model. Q. J. R. Meteorol. Soc. 2015. [Google Scholar] [CrossRef]
- Anderson, J.L. An ensemble adjustment Kalman filter for data assimilation. Mon. Weather Rev. 2001, 129, 2884–2903. [Google Scholar] [CrossRef]
- Mitchell, H.L.; Houtekamer, P.L.; Pellerin, G. Ensemble size, balance, and model-error representation in an ensemble Kalman filter. Mon. Weather Rev. 2002, 130, 2791–2808. [Google Scholar] [CrossRef]
- Whitaker, J.S.; Hamill, T.M. Ensemble data assimilation without perturbed observations. Mon. Weather Rev. 2002, 130, 1913–1924. [Google Scholar] [CrossRef]
- Meng, Z.; Zhang, F. Tests of an Ensemble Kalman Filter for Mesoscale and Regional-Scale Data Assimilation. Part III: Comparison with 3DVAR in a Real-Data Case Study. Mon. Weather Rev. 2008, 136, 522–540. [Google Scholar] [CrossRef]
- Husson, R. Development and Validation of a Global Observation-Based Swell Model Using Wave Mode Operating Synthetic Aperture Radar. Ph.D. Thesis, Université de Bretagne Occidentale, Brest, France, 2012. [Google Scholar]
- Tandeo, P.; Garello, R.; Fablet, R.; Husson, R.; Collard, F.; Chapron, B. Interpolated swell fields from SAR measurements. In Proceedings of the MTS/IEEE San Diego Conference, San Diego, CA, USA, 23–27 September 2013.
- NDBC Technical Document 09-02, Handbook of Automated Data Quality Control Checks and Procedures. Available online: http://www.ndbc.noaa.gov/ (accessed on 10 October 2017).
- Lygre, A.; Krogstad, H.E. Maximum Entropy Estimation of the Directional Distribution in Ocean Wave Spectra. J. Phys. Oceanogr. 1986, 16, 2052–2060. [Google Scholar] [CrossRef]
- Gerling, T.W. Partitioning sequences and arrays of directional ocean wave spectra into component wave systems. J. Atmos. Ocean. Technol. 1992, 9, 444–458. [Google Scholar] [CrossRef]
- Portilla, J.; Ocampo-Torres, F.J.; Monbaliu, J. Spectral Partitioning and Identification of Wind Sea and Swell. J. Atmos. Ocean. Technol. 2009, 26, 107–122. [Google Scholar] [CrossRef]
- Chapron, B.; Johnsen, H.; Garello, R. Wave and wind retrieval from SAR images of the ocean. Ann. Telecommun. 2001, 56, 682–699. [Google Scholar]
- Collard, F.; Ardhuin, F.; Chapron, B. Extraction of coastal ocean wave fields from SAR images. IEEE J. Ocean. Eng. 2005, 30, 526–533. [Google Scholar] [CrossRef]
- Johnsen, H.; Collard, F. ASAR Wave Mode Processing-Validation of Reprocessing Upgrade; Technical Report for ESA-ESRIN under Contract 17376/03/I-OL; NORUT Northern Research Institute: Frascati, Italy, 2004. [Google Scholar]
- Burgers, G.; Jan van Leeuwen, P.; Evensen, G. Analysis scheme in the ensemble Kalman filter. Mon. Weather Rev. 1998, 126, 1719–1724. [Google Scholar] [CrossRef]
- Dirren, S.; Torn, R.D.; Hakim, G.J. A data assimilation case study using a limited-area ensemble Kalman filter. Mon. Weather Rev. 2007, 135, 1455–1473. [Google Scholar] [CrossRef]
- Hanson, J.L.; Phillips, O.M. Automated analysis of ocean surface directional wave spectra. J. Atmos. Ocean. Technol. 2001, 18, 277–293. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S.; Stewart, R.W. The changes in amplitude of short gravity waves on steady non-uniform currents. J. Fluid Mech. 1961, 10, 529–549. [Google Scholar] [CrossRef]
- Gallet, B.; Young, W.R. Refraction of swell by surface currents. J. Mar. Res. 2014, 72, 105–126. [Google Scholar] [CrossRef]
- Li, H.; Kalnay, E.; Miyoshi, T. Simultaneous estimation of covariance inflation and observation errors within an ensemble Kalman filter. Q. J. R. Meteorol. Soc. 2009, 135, 523–533. [Google Scholar] [CrossRef]
- Snyder, C.; Zhang, F. Assimilation of simulated Doppler radar observations with an ensemble Kalman filter. Mon. Weather Rev. 2003, 131, 1663–1677. [Google Scholar] [CrossRef]
- Hamill, T.M.; Whitaker, J.S.; Snyder, C. Distance-dependent filtering of background error covariance estimates in an ensemble Kalman filter. Mon. Weather Rev. 2001, 129, 2776–2790. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Buoy | Distance from Source (km) | Frequency Slope (Hz/Day) | Swell Direction (°) |
|---|---|---|---|
| 51001 | 2910–3797 | 0.0232–0.0177 | 302.1–318.5 |
| 46089 | 4942–5953 | 0.0136–0.0113 | 282.3–291.7 |
| 46047 | 6127–7056 | 0.0110–0.0095 | 295.4–303.9 |
| 46086 | 6239–7175 | 0.0108–0.0094 | 295.8–304.1 |
| 32012 | 12,026–12,948 | 0.0056–0.0052 | 302.5–310.6 |
| Ensemble Members | Spatial Resolution | Time Resolution | Standard Deviation of Model Error | Standard Deviation of Observation Error | ||
|---|---|---|---|---|---|---|
| 1000 | 10° | 3 h | swell height | 0.3 m | swell height | 0.3 m |
| wavelength | 36 m | wavelength | 36 m | |||
| wave direction (u/v direction) | 0.1 | wave direction (u/v direction) | 0.1 | |||
| Ensemble Members | Spatial Resolution | Time Resolution | Standard Deviation of Model Error | Standard Deviation of Observation Error | ||
|---|---|---|---|---|---|---|
| 500 | 3°, 5°, 7°, 10° | 3,6,12,24 h | swell height | 0.1, 0.3, 0.7, 1, 1.5, 2, 3 m | swell height | 0.1, 0.3, 0.7, 1, 1.5, 2, 3 m |
| wavelength | 20, 40, 70, 100, 130 m | wavelength | 20, 40, 70, 100, 130 m | |||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Tandeo, P.; Fablet, R.; Husson, R.; Guan, L.; Chen, G. Validation and Parameter Sensitivity Tests for Reconstructing Swell Field Based on an Ensemble Kalman Filter. Sensors 2016, 16, 2000. https://doi.org/10.3390/s16122000
Wang X, Tandeo P, Fablet R, Husson R, Guan L, Chen G. Validation and Parameter Sensitivity Tests for Reconstructing Swell Field Based on an Ensemble Kalman Filter. Sensors. 2016; 16(12):2000. https://doi.org/10.3390/s16122000
Chicago/Turabian StyleWang, Xuan, Pierre Tandeo, Ronan Fablet, Romain Husson, Lei Guan, and Ge Chen. 2016. "Validation and Parameter Sensitivity Tests for Reconstructing Swell Field Based on an Ensemble Kalman Filter" Sensors 16, no. 12: 2000. https://doi.org/10.3390/s16122000