
Mechanical Coupling Error Suppression Technology for an Improved Decoupled Dual-Mass Micro-Gyroscope


Abstract
:
1. Introduction
2. Device Description
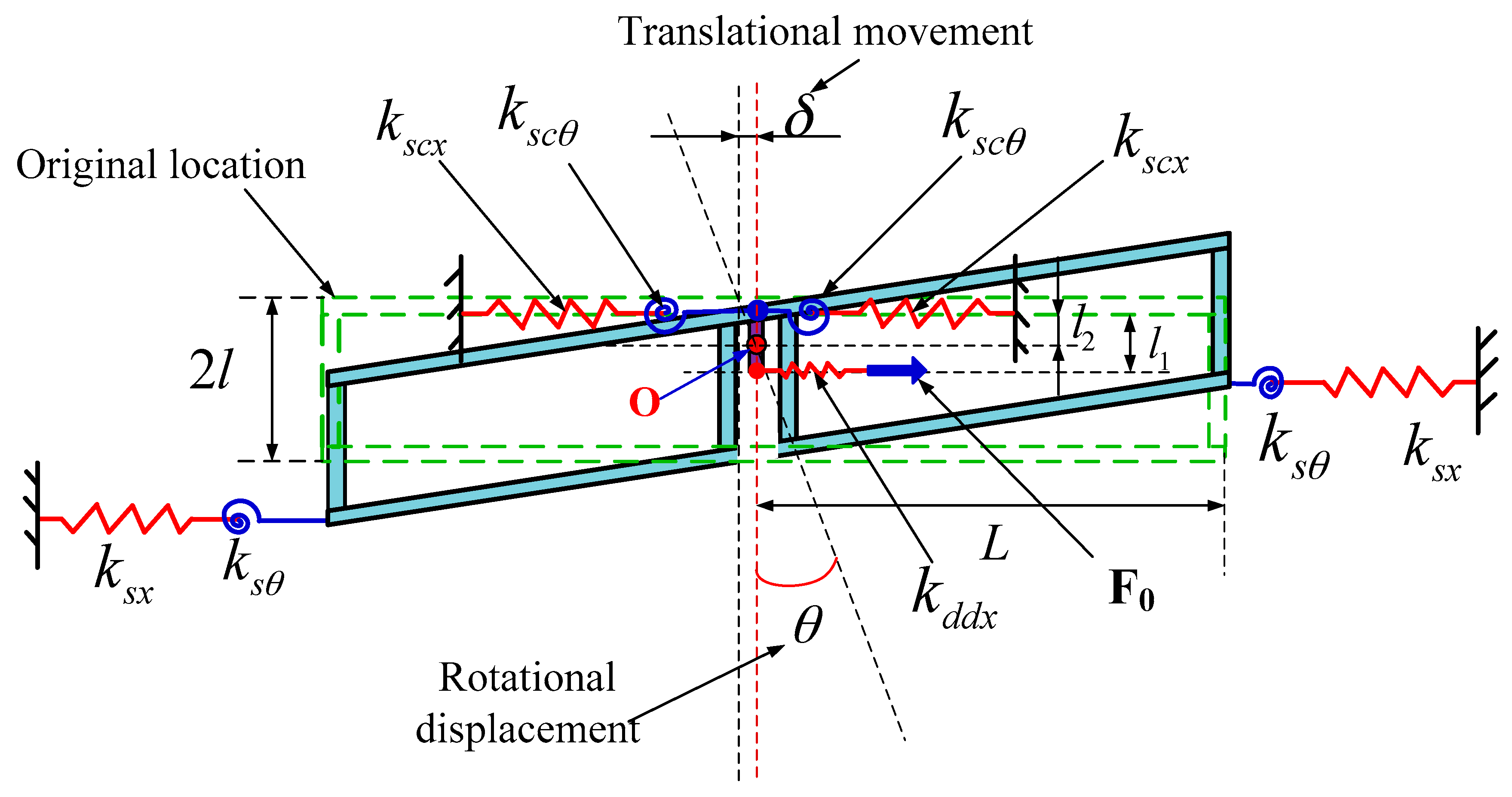
2.1. Device Principle
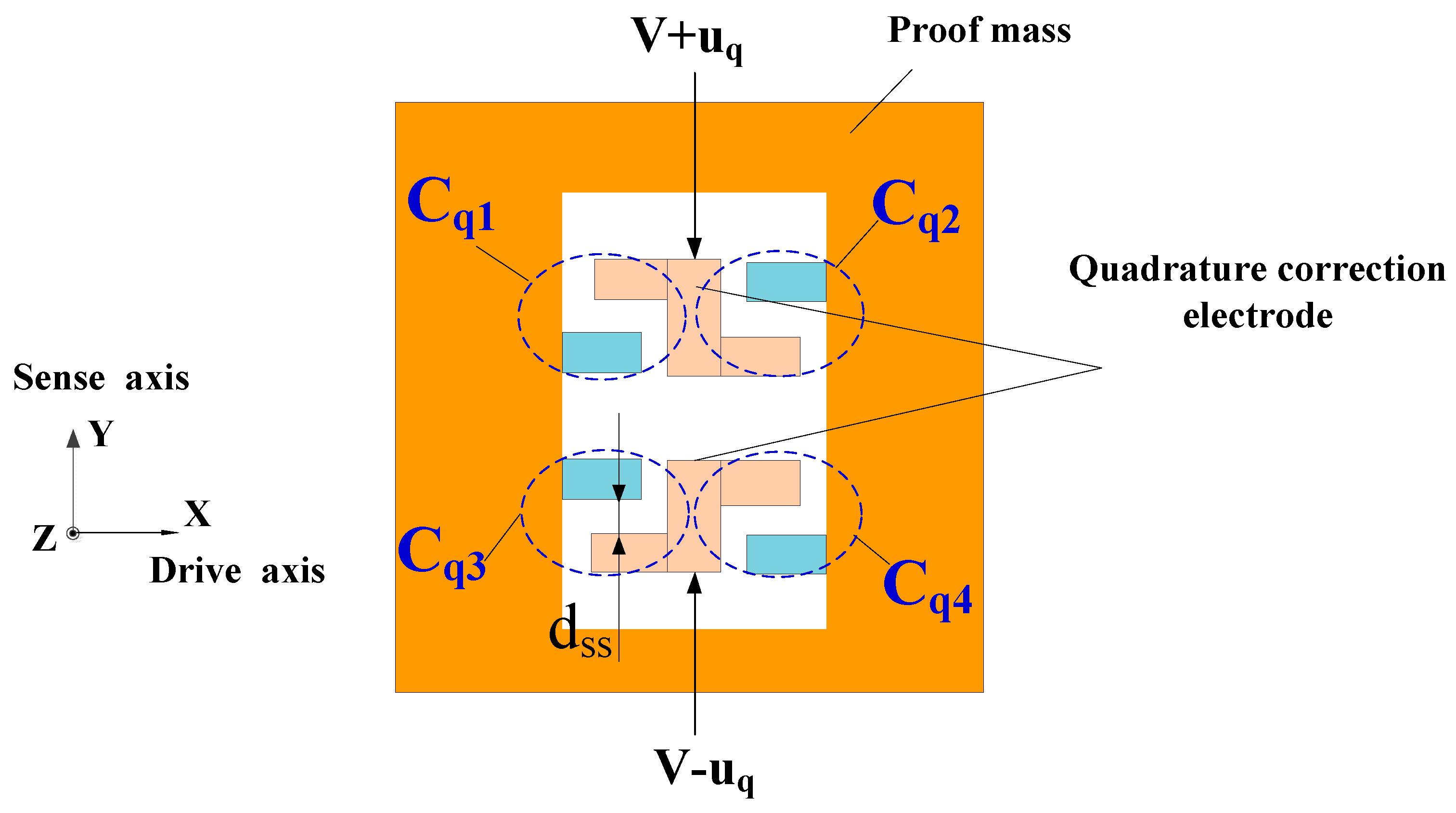
2.2. Quadrature Error Suppression
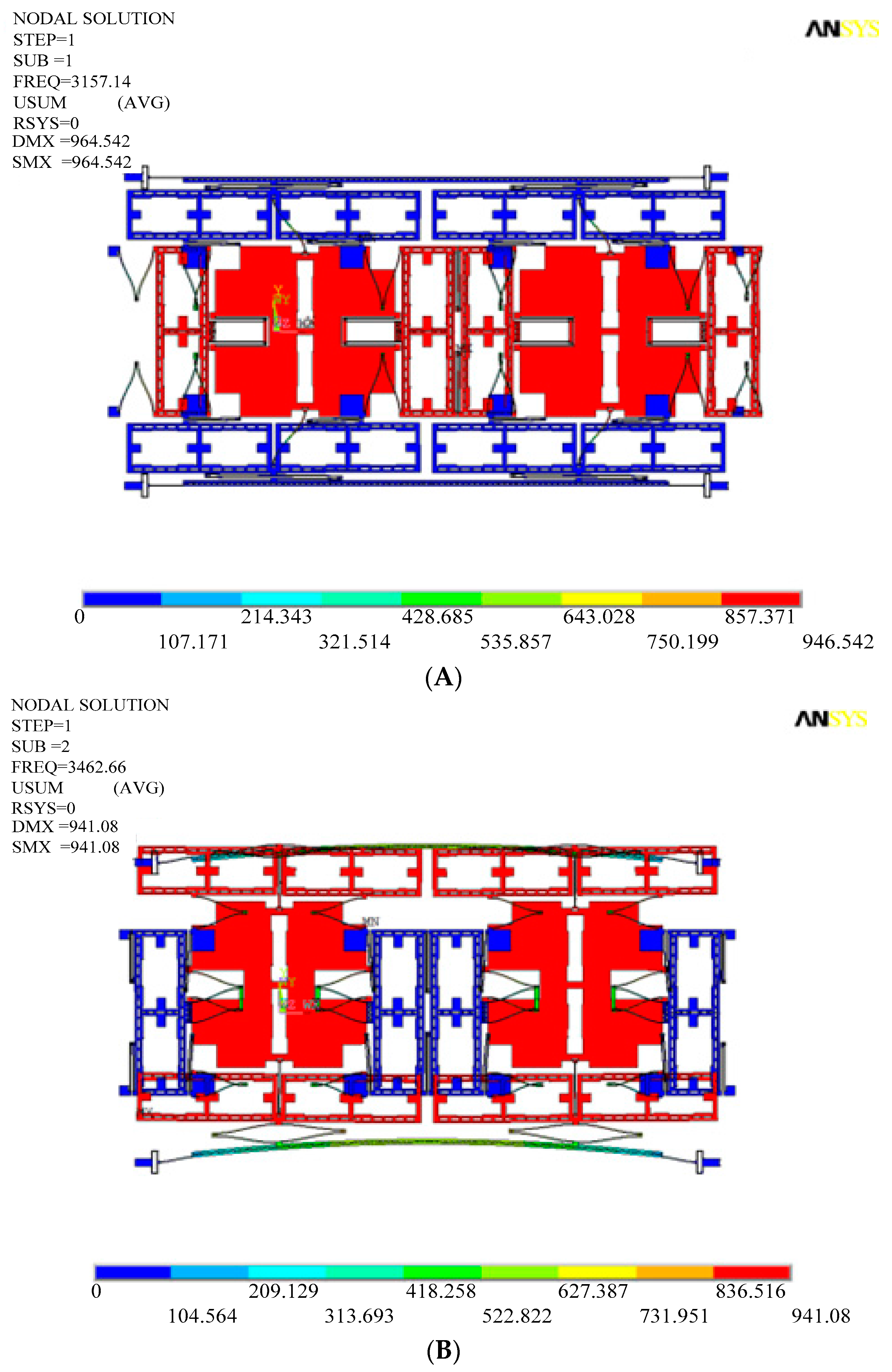
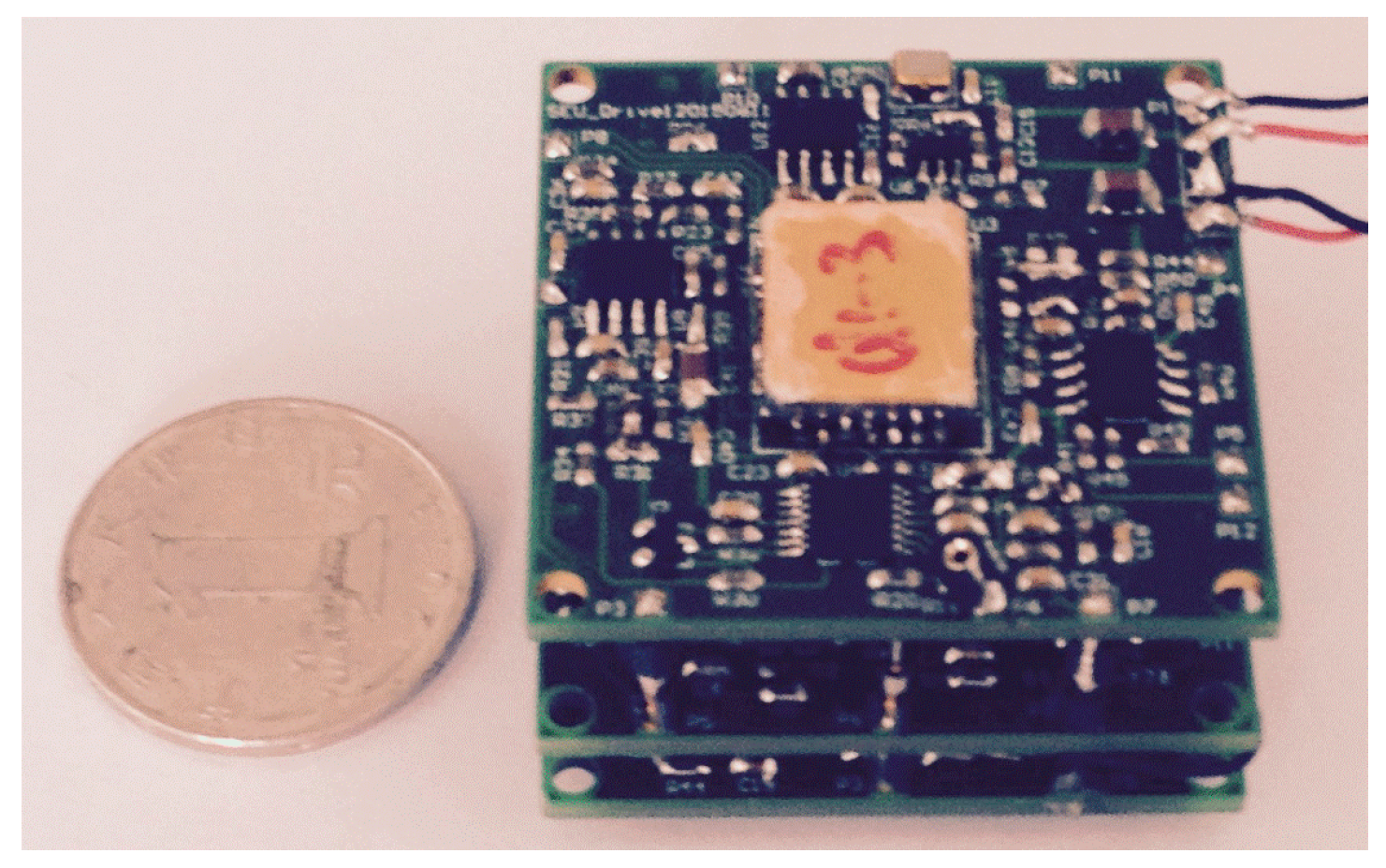
3. Structure Simulation and Fabrication
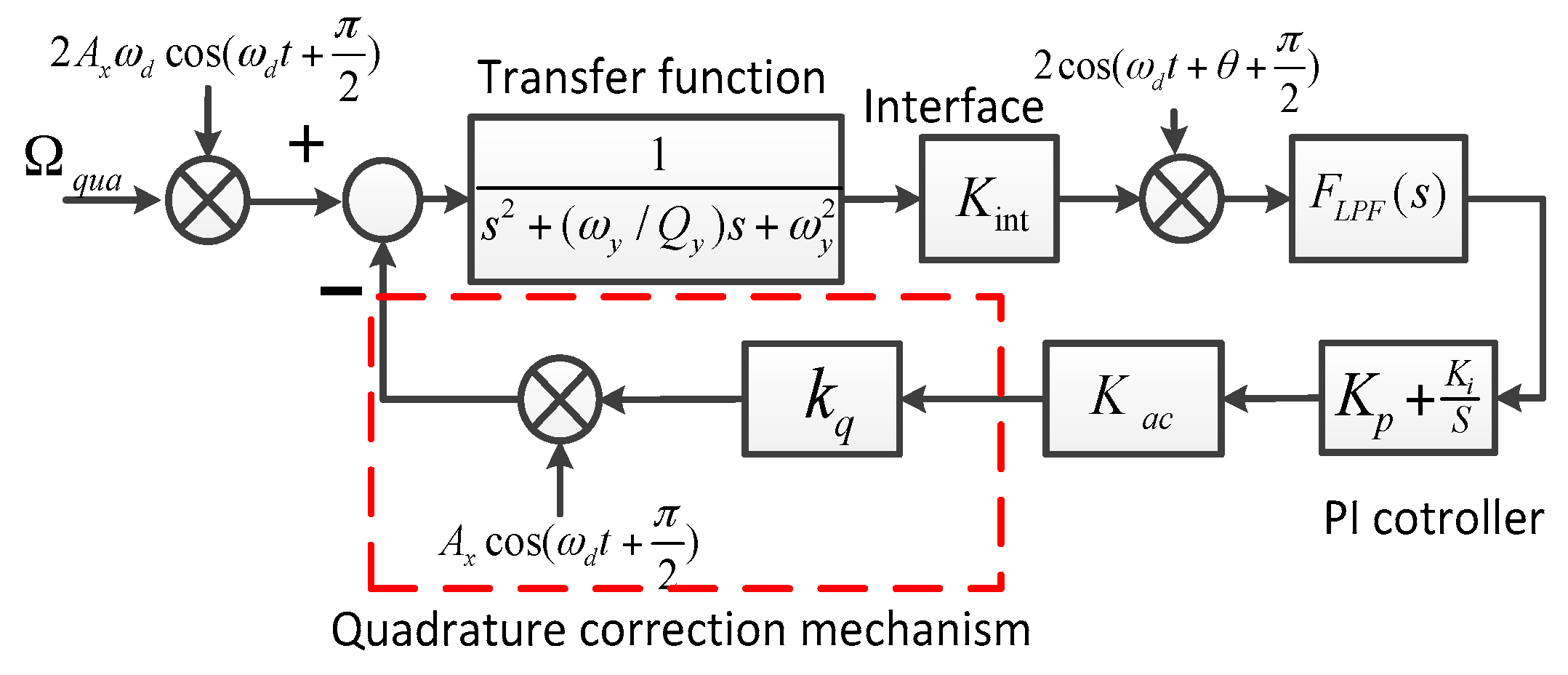
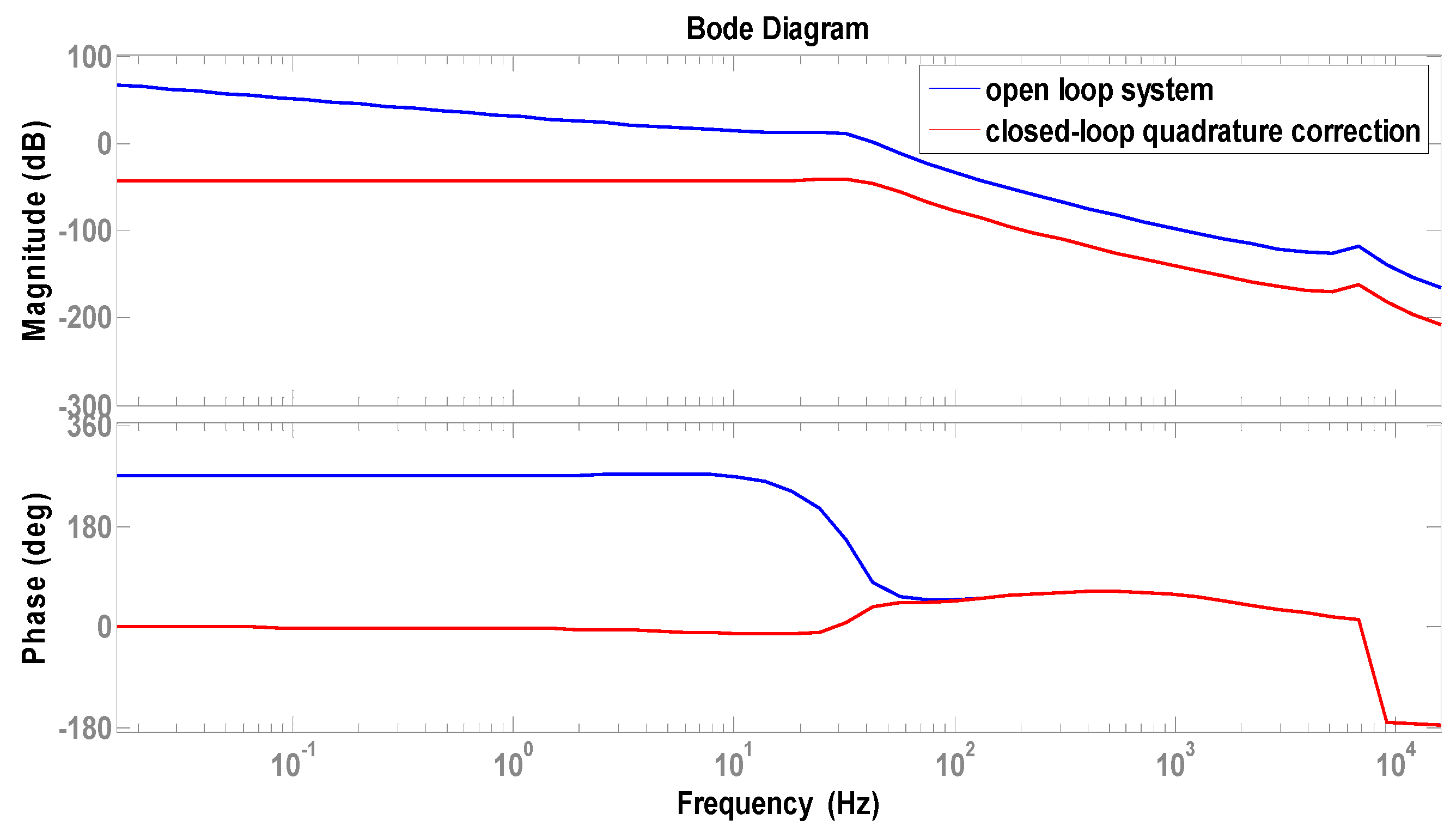
4. Quadrature Correction and Feedback Control
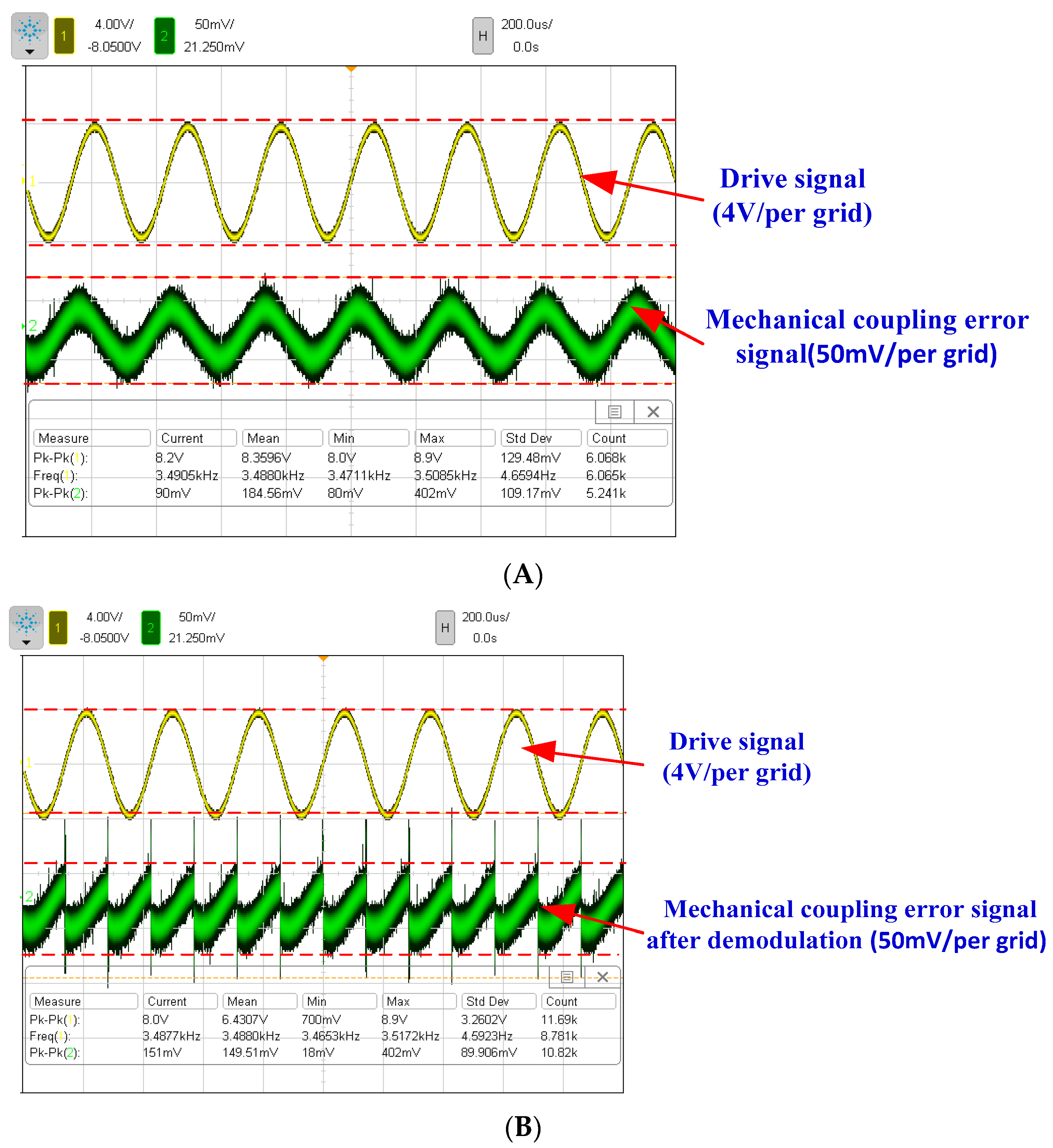
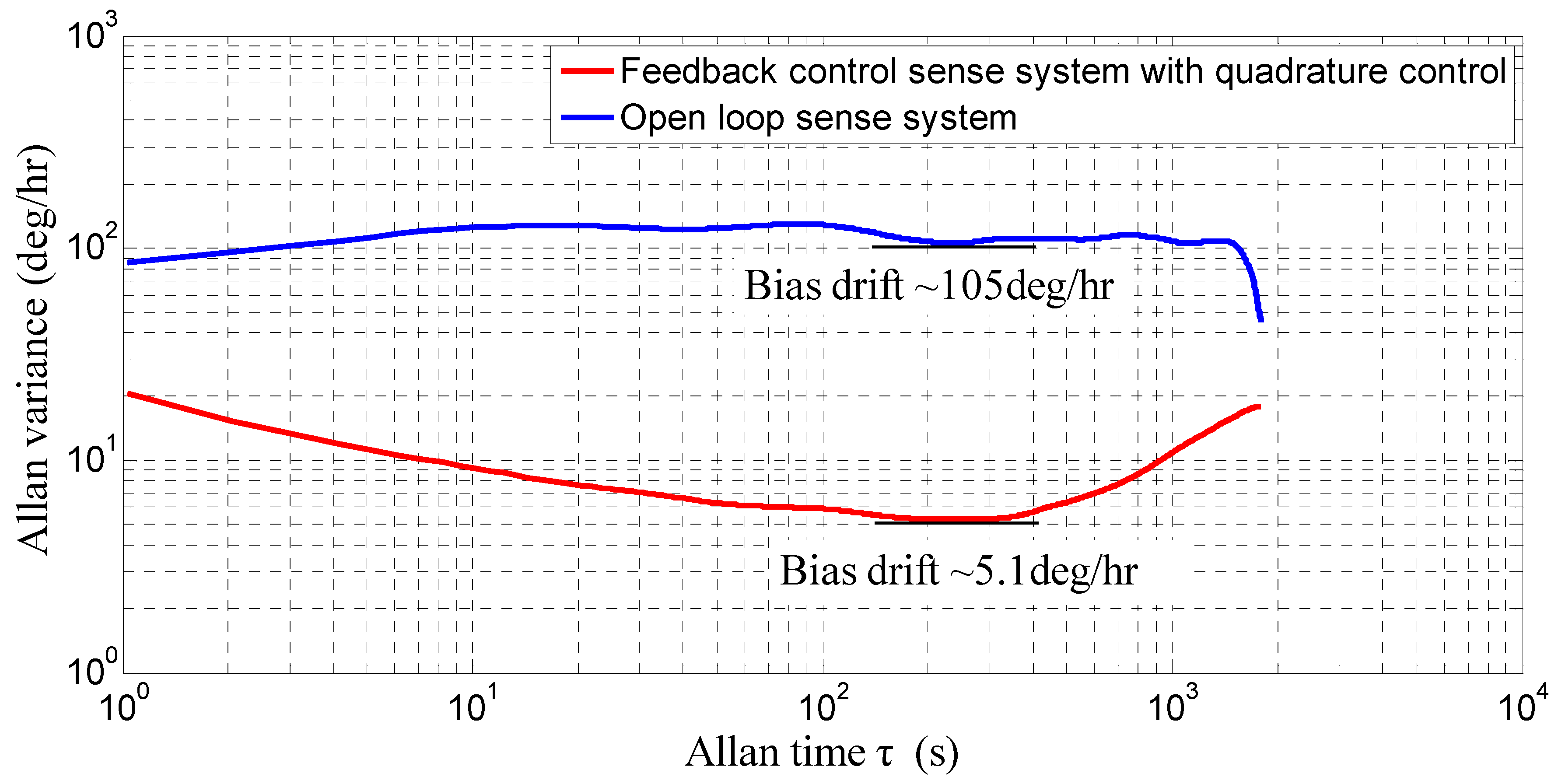
5. Experiments
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Eminoglu, B.; Kline, M.-H.; Izyumin, I.; Yeh, Y.-C.; Boser, B.-E. Background Calibrated MEMS Gyroscope. In Proceedings of the 2014 IEEE Sensors, Valencia, Spain, 2–5 November 2014; pp. 922–925.
- Trusov, A.-A.; Prikhodko, I.-P.; Zotov, S.-A.; Shkel, A.-M. Low-Dissipation Silicon Tuning Fork Gyroscopes for Rate and Whole Angle Measurements. IEEE Sens. J. 2011, 11, 2763–2770. [Google Scholar] [CrossRef]
- Maimon, R.; Lahav, O.; Gerson, Y.; Zohar, O.; Berko, H.; Krylov, S. Tactical Grade Microgyroscope with Dual Capcitive/optical Sensing. In Proceedings of the MEMS 2013, Taipei, Taiwan, 20–24 January 2013; pp. 637–640.
- Che, L.-F.; Xiong, B.; Li, Y.-F.; Wang, Y.-L. A novel electrostatic-driven tuning fork micromachined gyroscope with a bar structure operating at atmospheric pressure. J. Micromech. Microeng. 2010, 20. [Google Scholar] [CrossRef]
- Yang, B.; Yin, Y.; Huang, L.-B.; Wang, S.-R. Research on a New Decoupled Dual-mass Micro-Gyroscope. In Proceedings of the Tenth International Conference on Electronic Measurement & Instruments (ICEMI’2011), Chengdu, China, 16–19 August 2011; pp. 205–208.
- Sharma, A.; Zaman, M.-F.; Ayazi, F. A Sub-0.2°/hr Bias Drift Micromechanical Silicon Gyroscope with Automatic CMOS Mode-Matching. IEEE J. Solid State Circuits 2009, 44, 1593–1608. [Google Scholar] [CrossRef]
- Cheng, P.; Zhang, Y.J.; Gu, W.-T.; Hao, Z.-L. Effect of polarization voltage on the measured quality factor of a multiple-beam tuning-fork gyroscope. Sens. Actuators A Phys. 2012, 187, 118–126. [Google Scholar] [CrossRef]
- Painter, C.-C.; Shkel, A.-M. Active Structural Error Suppression in MEMS Vibratory Rate Integrating Gyroscopes. IEEE Sens. J. 2003, 3, 595–606. [Google Scholar] [CrossRef]
- Lapadatu, D.; Blixhavn, B.; Holm, R.; Kvisterøy, T. SAR500—A high-precision high-stability butterfly gyroscope with north seeking capability. In Proceedings of the 2010 IEEE/ION Position Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 6–13.
- Geiger, W.; Butt, W.-U.; Gaiber, A.; Frech, J. Decoupled microgyros and the design principle DAVER. Sens. Actuators A Phys. 2002, 95, 239–249. [Google Scholar] [CrossRef]
- Sonmezoglu, S.; Gavcar, H.-D.; Azgin, K.; Alper, S.-E. Simultaneous Detection of Linear and Coriolis Accelerations on A Mode-matched MEMS Gyroscope. In Proceedings of the MEMS 2014, San Francisco, CA, USA, 26–30 January 2014; pp. 32–35.
- Trusov, A.-A.; Schofield, A.-R.; Shkel, A.-M. Micromachined rate gyroscope architecture with ultra-high quality factor and improved mode ordering. Sens. Actuators A Phys. 2011, 165, 26–34. [Google Scholar]
- Yang, B.; Wu, L.; Zhou, H.; Hu, D.; Liu, X.-X. Non-ideal decoupled characteristics’ research and system performance test of dual-mass decoupled silicon micro-gyroscope. J. Chin. Inert. Technol. 2015, 23, 794–799. [Google Scholar]
- Yang, B.; Wang, X.-J.; Hu, D.; Wu, L. Research on the Non-ideal Dynamics of a Dual-Mass Silicon Micro-Gyroscope. Microsyst. Technol. 2015. [Google Scholar] [CrossRef]
- Sonmezoglu, S.; Alper, S.-E.; Akin, T. An Automatically Mode-Matched MEMS Gyroscope with 50 Hz Bandwidth. In Proceedings of the MEMS 2012, Paris, France, 29 January–2 February 2012; pp. 523–526.
- Yang, B.; Hu, D.; Wang, X.-J.; Wu, L. Research of a symmetrical decoupled dual-mass micro-gyroscope with an improved lever support system. Microsyst. Technol. 2015. [Google Scholar] [CrossRef]
- Palaniapan, M.; Howe, R.-T.; Yasaitis, J. Performance comparison of integrated z-axis framemicrogyroscopes. In Proceedings of the IEEE Sixteenth Annual International Conference on Micro Electro Mechanical Systems (MEMS 2003), Kyoto, Japan, 19–23 January 2003; pp. 482–485.
- Antonello, R.; Oboe, R.; Prandi, L.; Caminada, C.; Biganzoli, F. Open loop Compensation of the Quadrature Error in MEMS Vibrating Gyroscopes. In Proceedings of the 35th Annual Conference of IEEE Industrial Electronics (IECON ‘09), Porto, Portugal, 3–5 November 2009; pp. 4034–4039.
- Tatar, E.; Alper, S.-E.; Akin, T. Quadrature-Error Compensation and Corresponding Effects on the Performance of Fully Decoupled MEMS Gyroscopes. J. Microelectromech. Syst. 2012, 21, 656–667. [Google Scholar] [CrossRef]
- Lee, F.-Y.; Liang, K.-C.; Cheng, E.; Fang, W. Design and Implementation of a Fully-Decoupled Tuning Fork (Fdtf) Mems Vibratory Gyroscope for Robustness Improvement. In Proceedings of the 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015; pp. 1160–1163.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | |
|---|---|---|---|---|
| Length × Width (µm) | Drive decoupled beam | 617 × 10 | Thickness h (µm) | 60 |
| Drive suspension beam | 630 × 10 | Single proof mass m (kg) | 5.13 × 10−7 | |
| Sense suspension beam | 518 × 10 | Drive mode Q-factor Qx | 400 | |
| Sense decoupled beam | 540 × 10 | Sense mode Q-factor Qy | 255 | |
| Suspension beam of frame | 540 × 10 | Single drive stiffness kx (N/m) | 205.6 | |
| Sense coupling suspension beam | 665 × 10 | Drive coupling stiffness kox (N/m) | 32.5 | |
| Drive coupling suspension beam | 648 × 10 | Single sense stiffness ky (N/m) | 247.4 | |
| Lever support beam | 375 × 10 | Sense coupling stiffness koy (N/m) | 9.1 | |
| Modal | 1 | 2 | 3 | 4 | 5 |
| Frequency (Hz) | 3157 | 3463 | 3588 | 3622 | 6912 |
| Measurement Point | Non-Ideal Decoupling Displacement | ||||
|---|---|---|---|---|---|
| Original Structure | Improved Structure | ||||
| X-axis | Y-axis | X-axis | Y-axis | ||
| Drive mode | A | 8.2355 | −25.697 | −4.18045 | −0.0142 |
| B | 3.56 | 0.2235 | −4.2411 | 0.08024 | |
| C | 8.2355 | 26.164 | −4.18135 | −0.0143 | |
| D | 959.71 | 0.1766 | −960.14 | 0.08366 | |
| Sense mode | E | −7.5332 | −12.260 | 10.093 | −1.4942 |
| F | 0.1549 | −12.112 | −0.11313 | −1.5029 | |
| G | 7.8458 | −12.260 | −10.319 | −1.4942 | |
| H | 0.1603 | −900.11 | −0.11848 | −909.05 | |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| ωd (rad/s) | 3588 × 2π | nq | 34 |
| ωy (rad/s) | 3622 × 2π | kq(N/(m·V·kg)) | 44,054 |
| Ax (µm) | 5 | Kp | 1 |
| Kac | 162.5 | Ki | 100 |
| V (V) | 5 | Qy | 200 |
| h (µm) | 60 | Kint | 640,000 |
| dss (µm) | 4 | FLPF(s) | 20,000/(s2 + 150s + 20,000) |
| Reference | Parameter | ||
|---|---|---|---|
| Quadrature error(°/s) | Decoupling mechanism | Proof mass amount | |
| [17] | 300 | Part- decoupling | Single |
| [18] | 2000 | Part-decoupling | Dual |
| [19] | 75 | Whole-decoupling | Dual |
| [20] | 500 | Whole-decoupling | Dual |
| [13] | 158.65 | Whole-decoupling | Dual |
| This work | 16.43 | Whole-decoupling | Dual |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, B.; Wang, X.; Deng, Y.; Hu, D. Mechanical Coupling Error Suppression Technology for an Improved Decoupled Dual-Mass Micro-Gyroscope. Sensors 2016, 16, 503. https://doi.org/10.3390/s16040503
Yang B, Wang X, Deng Y, Hu D. Mechanical Coupling Error Suppression Technology for an Improved Decoupled Dual-Mass Micro-Gyroscope. Sensors. 2016; 16(4):503. https://doi.org/10.3390/s16040503
Chicago/Turabian StyleYang, Bo, Xingjun Wang, Yunpeng Deng, and Di Hu. 2016. "Mechanical Coupling Error Suppression Technology for an Improved Decoupled Dual-Mass Micro-Gyroscope" Sensors 16, no. 4: 503. https://doi.org/10.3390/s16040503