1. Introduction
Sintered Nd-Fe-B permanent magnets make it possible to increase the performance of devices and can also enable their miniaturization. The main field of application for this type of permanent magnet are electric machines such as electric motors and generators. For example, in direct current motors permanent magnets are applied in stators as an excitation source of magnetic field. In brushless direct current motors permanent magnets are applied to rotors. In small wind power plants permanent magnets are used in 3-phase axial flux machines, without a soft magnetic core, and with power of about a few kW. With the development of magnetic materials the range of their application is broadening, among others in magnetic sensors. Developments in material engineering allow the elaboration of new materials with improved parameters and their application in a new generation of magnetic sensors. For many applications the diversity of the physical properties of the materials and the possibility of producing magnets with a complicated shape with two or more magnetic poles are very important and enable the application of magnets in magnetic sensors. These types of sensor are elements of many measuring devices. The main role of magnetic sensors is not only in the measurement of the distribution and parameters of the magnetic field, but also in the measurement of another physical quantities such as magnetic force, where the magnetic field transforms into a processing measurement signal. For many applications it is very important to magnetize to saturation the whole volume of the magnet and ensure a suitable distribution of magnetic induction on the surface of the permanent magnets in magnetic sensors [
1,
2].
Magnetic sensors with permanent magnets are often applied in measuring transducers, such as devices for the measurement of linear or rotational speed, in tachometers, in reeds, vibrations and pressure meters,
etc. Three pairs of permanent magnets are used in a three degrees of freedom displacement measurement system to create magnetic field in the air. This magnetic field is measured by Hall sensors and their signals give position information. In this type of device, permanent magnets must be magnetized uniformly for accurate position measurement [
3]. In turn, a permanent magnet is used in a noncontact force measuring system and must also be magnetized uniformly. In the case of non-uniform magnetization, the force will be less than expected in the design stage of the sensor because a permanent magnet produces less magnetic flux [
4]. Permanent magnets are also used in electromagnetic flow meters for liquid metals. The converter consists of a contactless electromagnetic pump with a torque sensor mounted on the pump shaft. The electromagnetic pump is composed of two rotating steel discs with embedded permanent magnets with alternating poles. The rotation of the discs creates a travelling sinusoidal magnetic field and eddy currents within the liquid metal. The interaction of the magnetic field and induced eddy currents generates electromagnetic Lorentz force that provides the pumping effect. The flow rate is proportional to this force, and the torque is measured by a torque sensor and is converted to a flow rate. In this meter, uniform magnetization is essential for trustworthy flow measurement of the liquid metal, especially for pipes with large diameters and thicknesses [
5].
Sintered Nd-Fe-B magnets have high magnetic energy and this kind of permanent magnet is mainly magnetized in the last stage of production using high voltage (about 5 kV) impulse magnetizers equipped with capacitors with large capacitance [
6]. The electric energy stored in the capacitors is discharged by a magnetizing fixture, creating the magnetic field needed for magnetization.
Each hard magnetic material has a defined magnetic field strength that enables its magnetization to saturation. Producers of permanent magnets do not often provide such information. If they do provide the value of this magnetic field strength, often it is more than practically needed. A larger magnetic field causes higher electric current impulses and the magnetization fixture is mechanically strained more than necessary. This can mechanically and thermally spoil the magnetization fixture earlier than expected.
Magnetic, electric, electromagnetic and electromechanical devices need permanent magnets with different numbers and configurations of magnetic poles. Larger magnets with two or more magnetic poles can be composed of two pole magnets. However, in this situation there are many problems, e.g., gluing of magnets, or imperfect distribution of magnetic flux density in the air gap. A magnetizing fixture should be designed and made for the required dimensions of the magnet, number of magnetic poles and their patterns. Sometimes a magnetizing fixture can be universal for some types of permanent magnets, such as two pole with axial magnetization. Permanent magnets with different dimensions can be magnetized in this type of fixture. The amount of electrical energy gathered in a bank of capacitors determines the size and weight of the permanent magnets to be magnetized.
Nd-Fe-B sintered permanent magnets are made of electrically conductive material. That is why in these kinds of magnet, during impulse magnetization, eddy currents flow and cause inhomogeneous magnetization, power loss and unwanted heating of the magnets. This can be mainly seen in magnets with a large volume.
Impulse magnetizers are built as low voltage (450–500 volts), medium voltage (800–1000 volts) and high voltage (1500–3000 volts) appliances. Higher voltage magnetizers produce shorter magnetic field impulses and are more efficient. A process of impulse magnetization of magnets using condensers was first applied in about 1944, but there was a problem with such magnetizers. They often produced, depending on the resistance of the magnetizing fixture, oscillating currents which in a second pulse causes demagnetization of the magnet [
6]. Improved magnetizers were applied from 1954 [
7]. Two-pole magnets can be magnetized axially or diametrally in the case of cylindrical and ring magnets. Permanent magnets can be magnetized before or after mounting in a device [
8,
9]. In the case of ring magnets, they can be magnetized radially, also called homopolarly (one pole on an internal diameter and the other on an external diameter) [
10]. Multipolar magnets can be magnetized radially or axially. The magnetization of a bush magnet with four radial poles was analyzed in [
11,
12,
13,
14]. In turn, the magnetization of an axial eight-pole magnet was analyzed in [
15,
16], and six-pole in [
17].
First, for an analysis of the impulse magnetization process, analytical calculations were used. Since the 1980s, with improved computers, numerical analysis has been introduced in the design of magnetizers and the features of impulse magnetization. Nakata and Takahashi performed the first analyses of a transient magnetic field in a capacitor-discharge impulse magnetizer. They combined Maxwell’s equation with Kirchhoff’s equation for an electromagnetic analysis of the magnetization of a four-pole polymer-bonded magnet [
11]. However, they did not consider eddy currents in the magnet, but took into account the eddy currents in the pole piece and yoke of a magnetizing fixture. Lee in his article deals with the magnetization of an axially oriented eight-pole epoxy-bonded Nd-Fe-B magnet. This type of magnet has high resistivity and in these magnets eddy currents can be neglected. However, it was also assumed that the magnet has a permeability equal to 1 and this was represented as an air gap in simulations [
15]. This assumption is valid only for highly saturated permanent magnets. Jewell, Howe and Birch analyzed the magnetization of a four-pole radial Nd-Fe-B permanent magnet for motors [
12]. In this research, they took eddy currents into consideration in magnetizing a bush magnet, but the magnet was only 1.5 mm thick and the eddy currents could also be neglected. A simulation of magnet magnetization was also conducted in-situ in the vicinity of soft magnetic materials, so the current required was not as high as in an air-core magnetizing fixture. Magnet magnetization in a mounted motor is difficult also because of the existence of bulk soft magnetic materials in a motor. The same authors conducted magnetization and measurements of electric parameters. Magnetization of a fully mounted motor is difficult and full saturation is hard to obtain because of the insufficient capacitance of the capacitors [
13,
14]. Heiden, Arkadan and Brauer also reported in [
18] that magnetization of an Nd-Fe-B magnet, with the use of a magnetization fixture with a soft magnetic core, was not fully conducted due to eddy currents induced in the magnet. Air-cored magnetizing fixtures are easier to analyze because the inductance of the magnetizing winding is linear and an impulse current can be closely calculated. A four-pole radial field magnetizing fixture was applied for magnetization of an isotropic Nd-Fe-B bonded magnet. Because of the high resistivity of the magnet, impulse eddy currents in this magnet were neglected [
19]. An axial field multipole magnetizing fixture was designed and used for magnetization of a six-pole magnet. This type of magnetizing fixture is air-cored and 24 kA peak currents are produced [
17]. Magnetization of an eight-pole planar Nd-Fe-B ring bonded magnet was analyzed and a magnetizing fixture for this magnet was designed and applied. This fixture uses soft magnetic composite (SMC) material for the magnetic core. Due to the high resistivity of the SMC material, it was possible to decrease the impulse magnetizing currents in comparison with air-cored fixtures. The SMC material enabled uniform magnetization of the core and the lack of displacement of magnetic flux from the magnetic core [
16,
20]. Multipolar magnetization of a planar and cylindrical permanent magnet with 36 magnetic poles resembling a chess-board was developed. These magnets could be applied in rotary linear actuators and planar electric motors [
21,
22]. Recently, for a description of the magnetization process of permanent magnets, the finite element method has been used with the Jiles-Atherton hysteresis model [
23].
In the paper the magnetization process of an Nd-Fe-B permanent magnet is considered and optimized electrical supply parameters were determined for magnetization of the magnet practically to saturation. Impulse currents with low values enable electrical energy savings during magnetization of permanent magnets, especially in mass production. What is more, it is possible to increase the number of magnets magnetized in the same amount of time, because energizing the capacitors to a lower voltage takes less time.
2. Materials and Methods
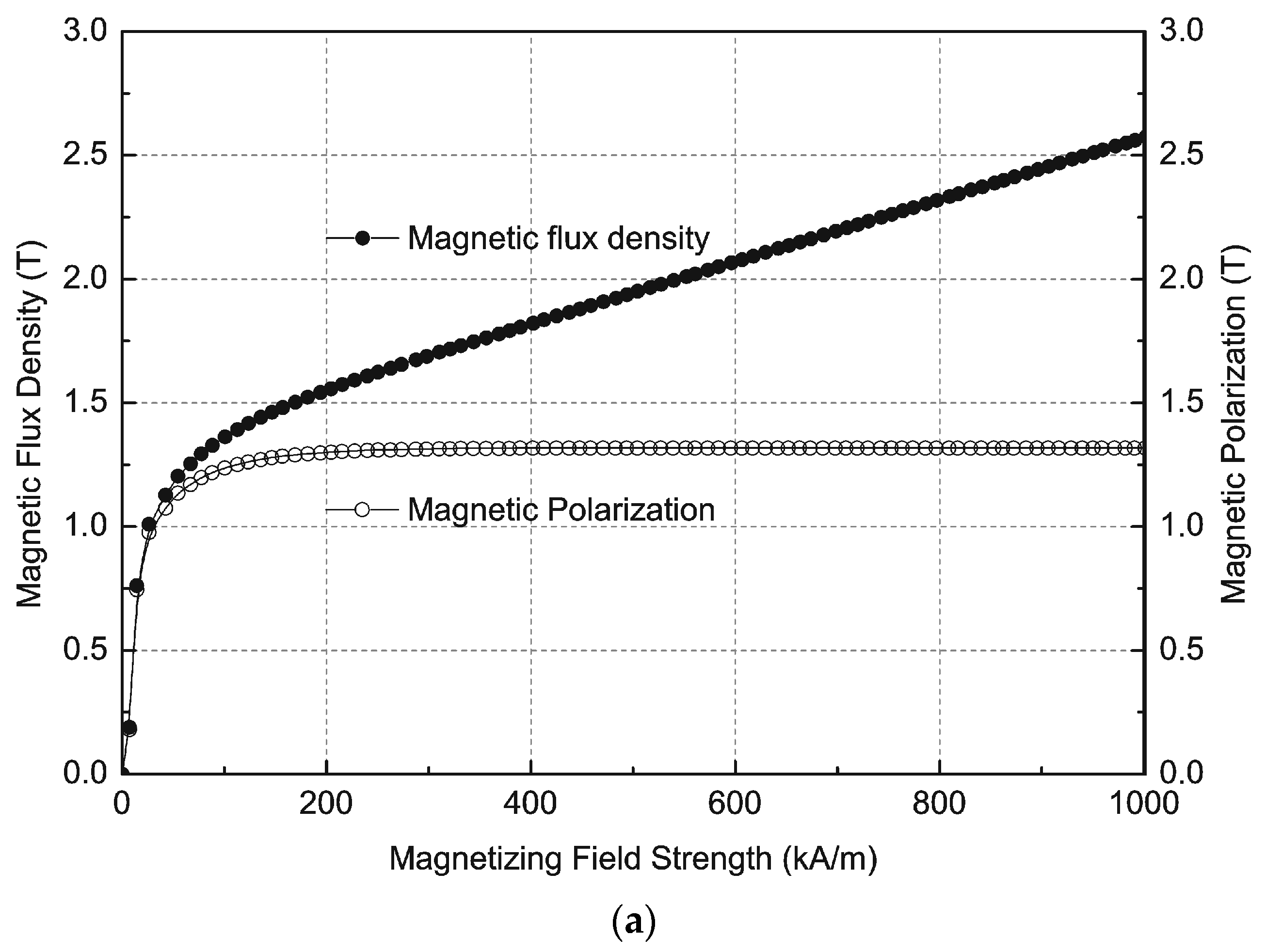
The research was conducted on commercially available grade N38 anisotropic sintered Nd-Fe-B permanent magnets. These permanent magnets, according to supplier data, have the following parameters: remanence B
r = 1.25 T, coercivity of magnetic flux density min. H
Cb = 899 kA/m, coercivity of magnetic polarization min. H
cJ = 955 kA/m, maximum value of (BH) product (BH)
max = 310 kJ/m
3, resistivity ρ = 1.44 × 10
−6 Ω·m [
24]. A permanent magnet 70 mm in diameter and 20 mm in height was chosen for the analysis of impulse magnetization.
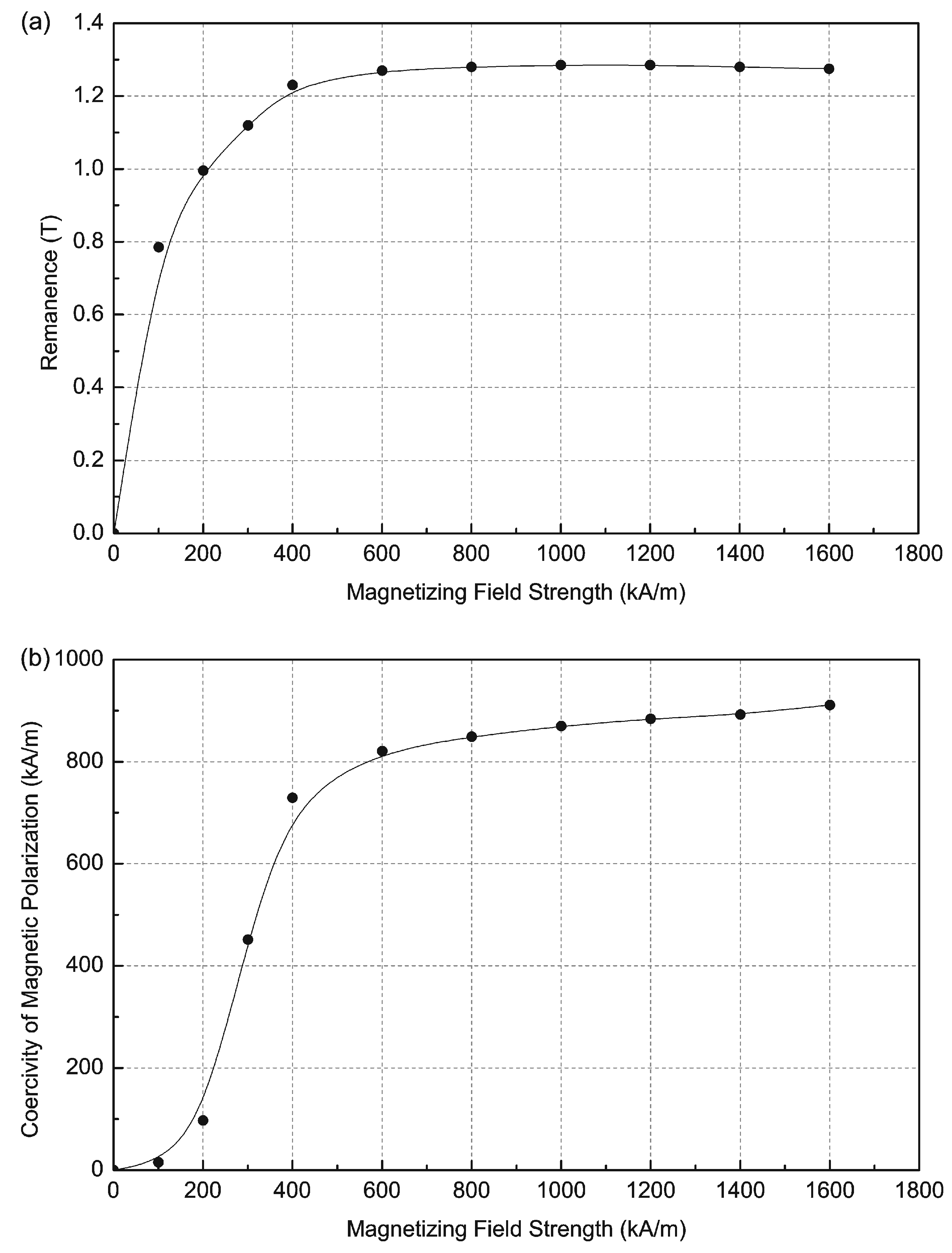
For determination of the saturation magnetic field, samples made of N38 material with dimensions 30 × 10 × 10 mm with the direction of anisotropy according to 10 mm length were used. It was not possible to measure the parameters of the magnet 70 mm in diameter and 20 mm in height that was chosen for this study, due to the limitations of the measuring equipment. Measurements of magnetization and demagnetization curves were conducted using a hysteresisgraph AMH-20K-HS manufactured by Laboratorio Elettrofisico Walker LDJ Scientific (Nerviano, Italy). Measurements were conducted based on IEC standard IEC 60404-5.
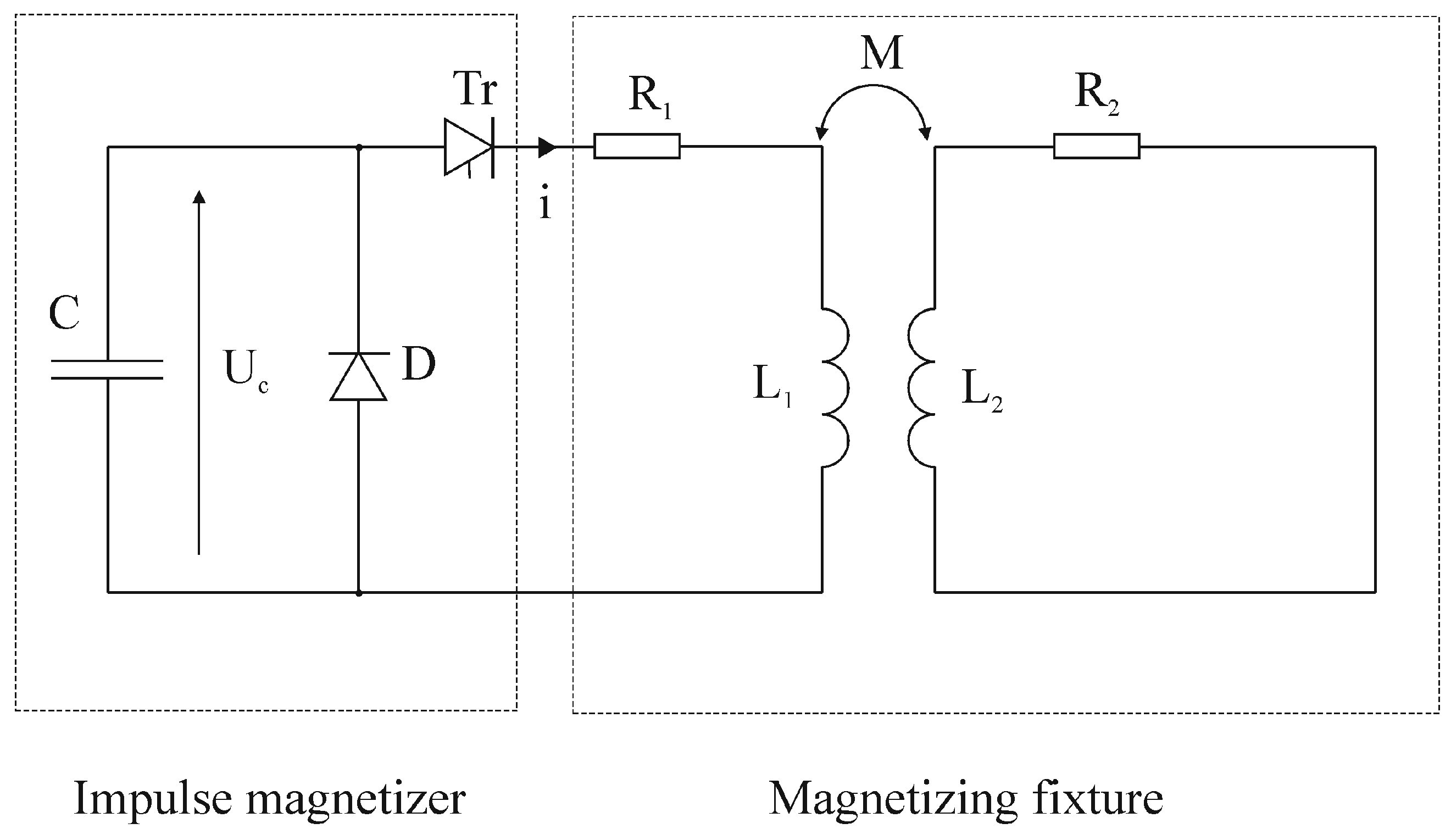
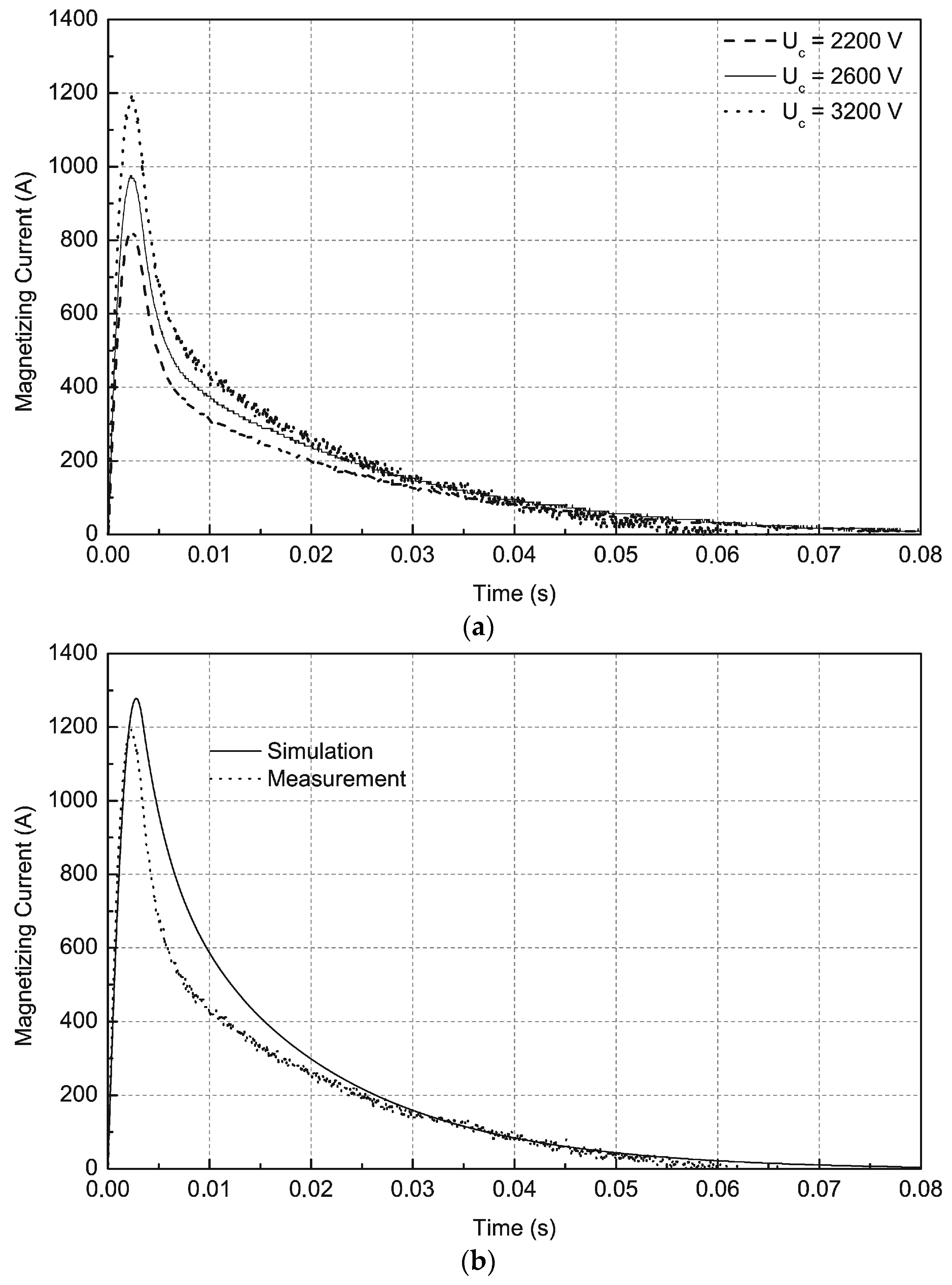
Impulse magnetization was conducted using an impulse magnetizer. A magnetization fixture was supplied from an impulse magnetizer, designed and manufactured in the Tele & Radio Research Institute, that consists of a bank of capacitors with C = 1 mF capacitance and regulated voltage Uc from 0 to 5000 V. The impulse current is triggered by a thyristor as an electronic switch. The impulse magnetizer is also equipped with a diode that enables an aperiodical shape of current waveforms vs. time in the winding. The impulse magnetizer is supplied from an AC 230 V, 50 Hz line.
The magnetizing fixture was designed and manufactured by Wroclaw University of Technology. It is a cylinder with an internal diameter of 80 mm for a magnet to be magnetized and an external diameter of 150 mm and 193 mm in height. The magnetization fixture consists of an internal copper coil with 440 turns of 3 mm diameter wire and an external tube of aluminium with a diameter of 150 mm and 4 mm thickness to ensure high strength against high impulse currents and forces. The aluminium tube helps to increase the mechanical strength of the coil and allows easier emission of the heat that comes from the currents in the wires during frequent magnetization. This tube is paramagnetic and is sufficient for the mechanical safety of the coil. The coil and the tube have the same axis of rotation.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












