
RF Spectrum Sensing Based on an Overdamped Nonlinear Oscillator Ring for Cognitive Radios


Abstract
:1. Introduction
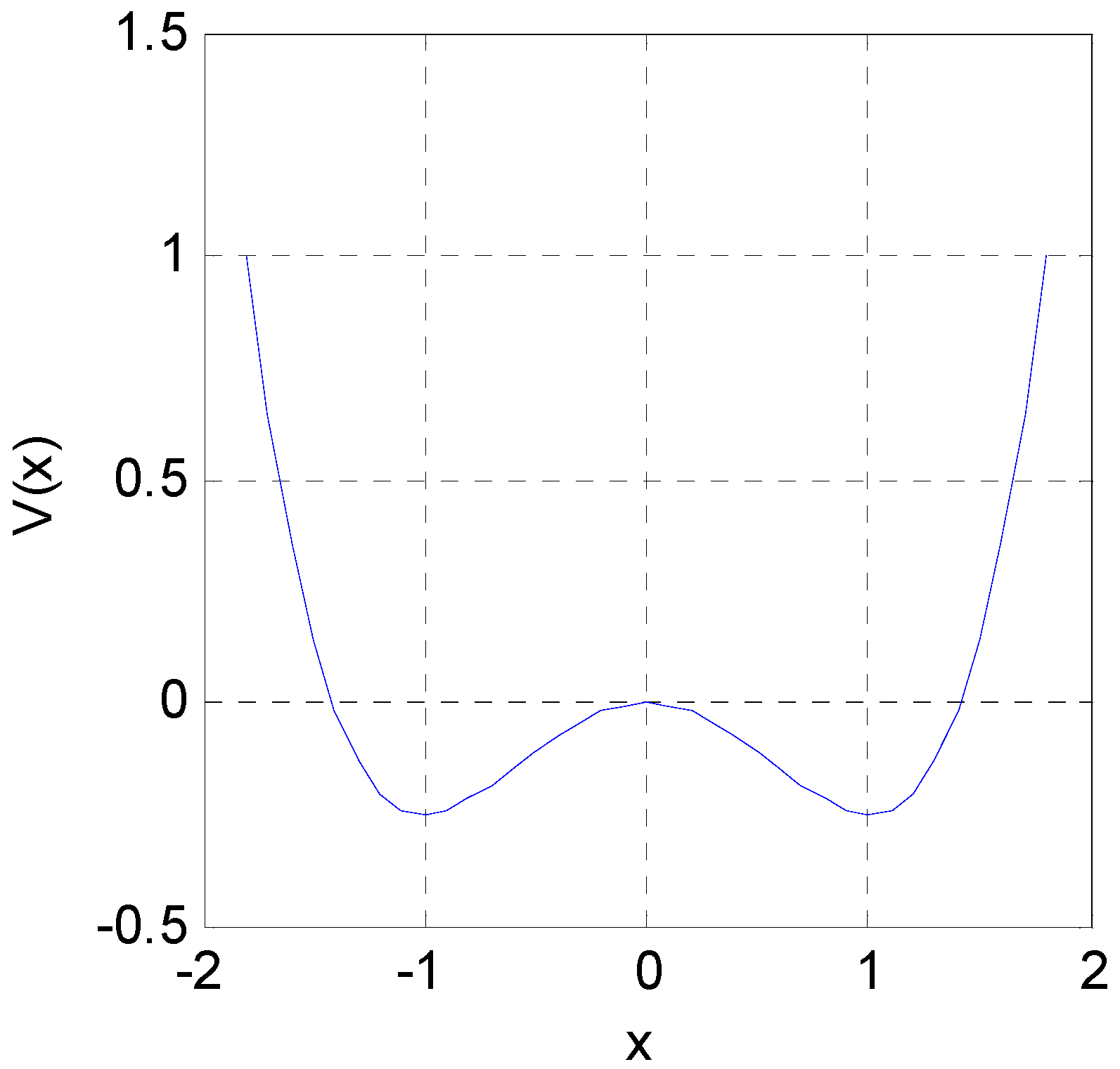
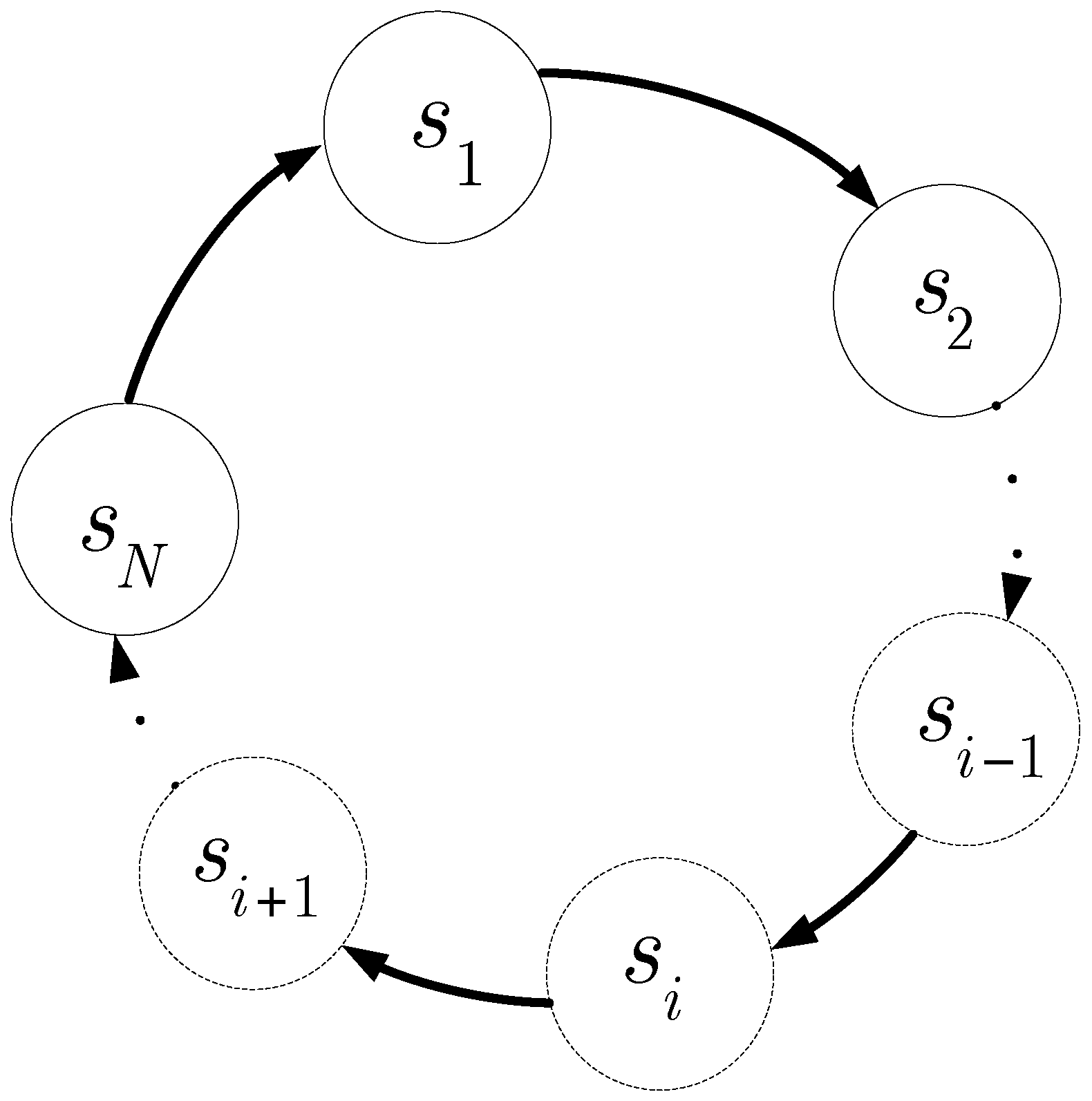
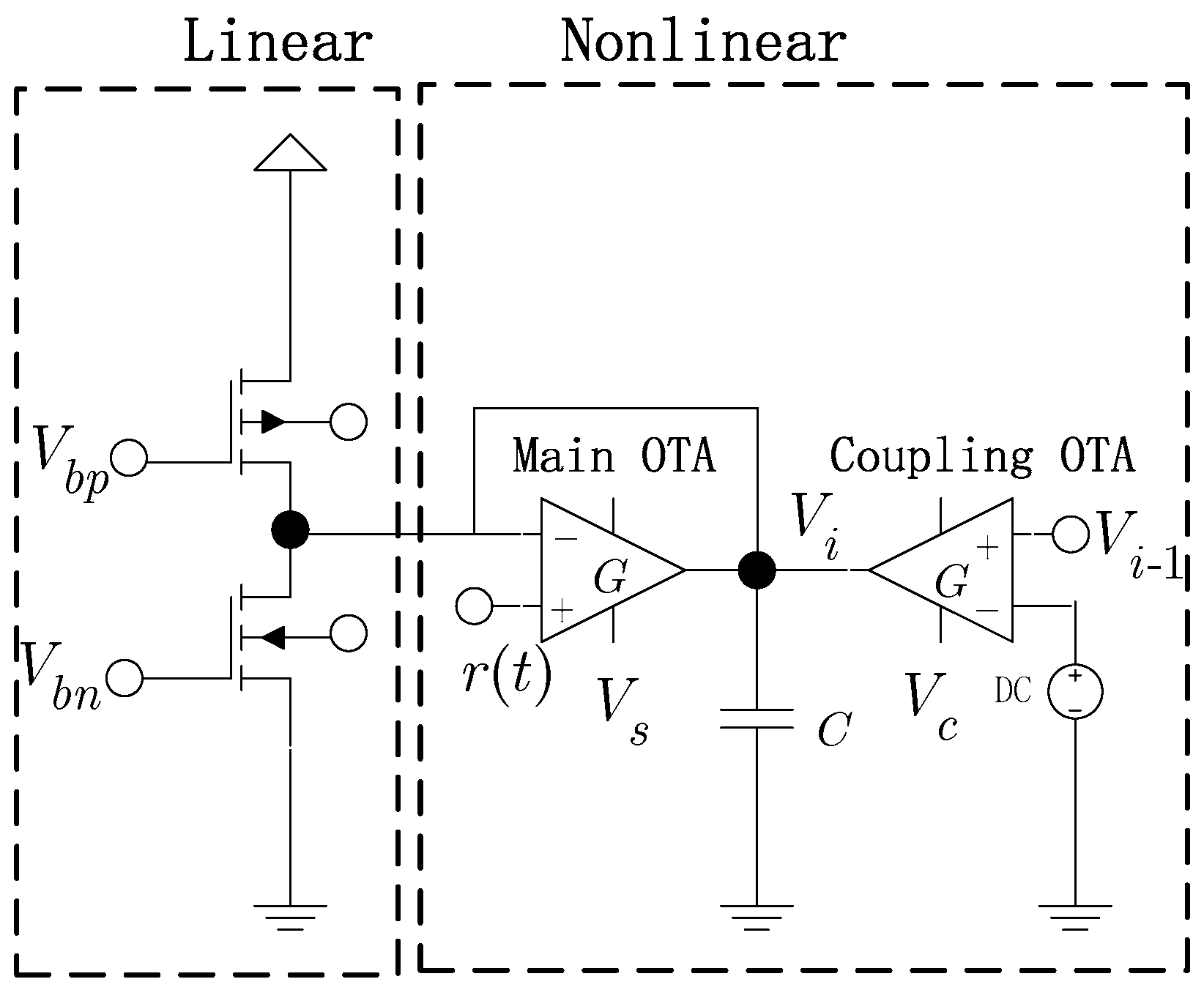
2. Basic Structure of a Coupled, Overdamped Duffing Oscillator Ring
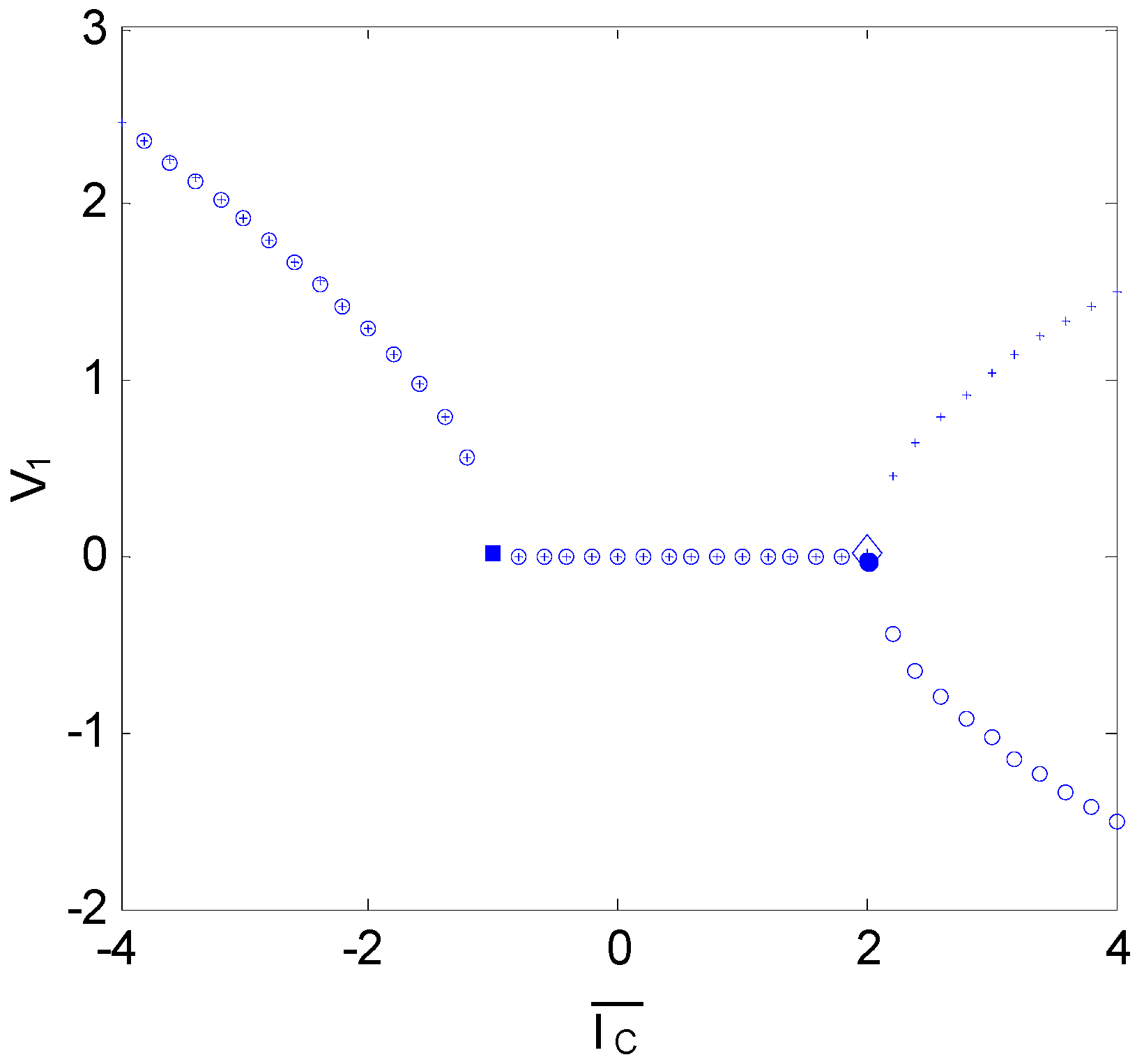
3. Dynamics and Analysis
3.1. Dynamic Model
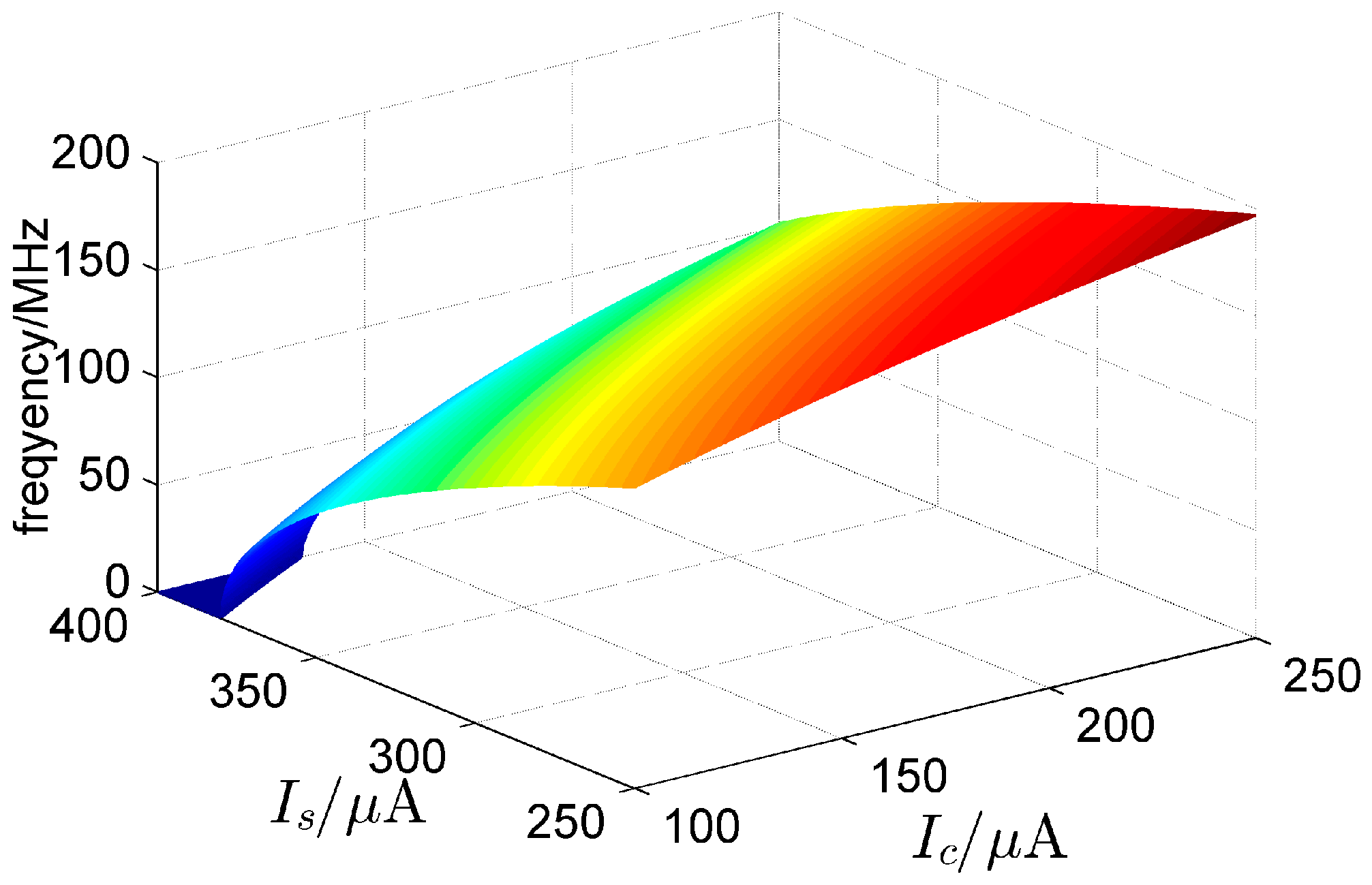
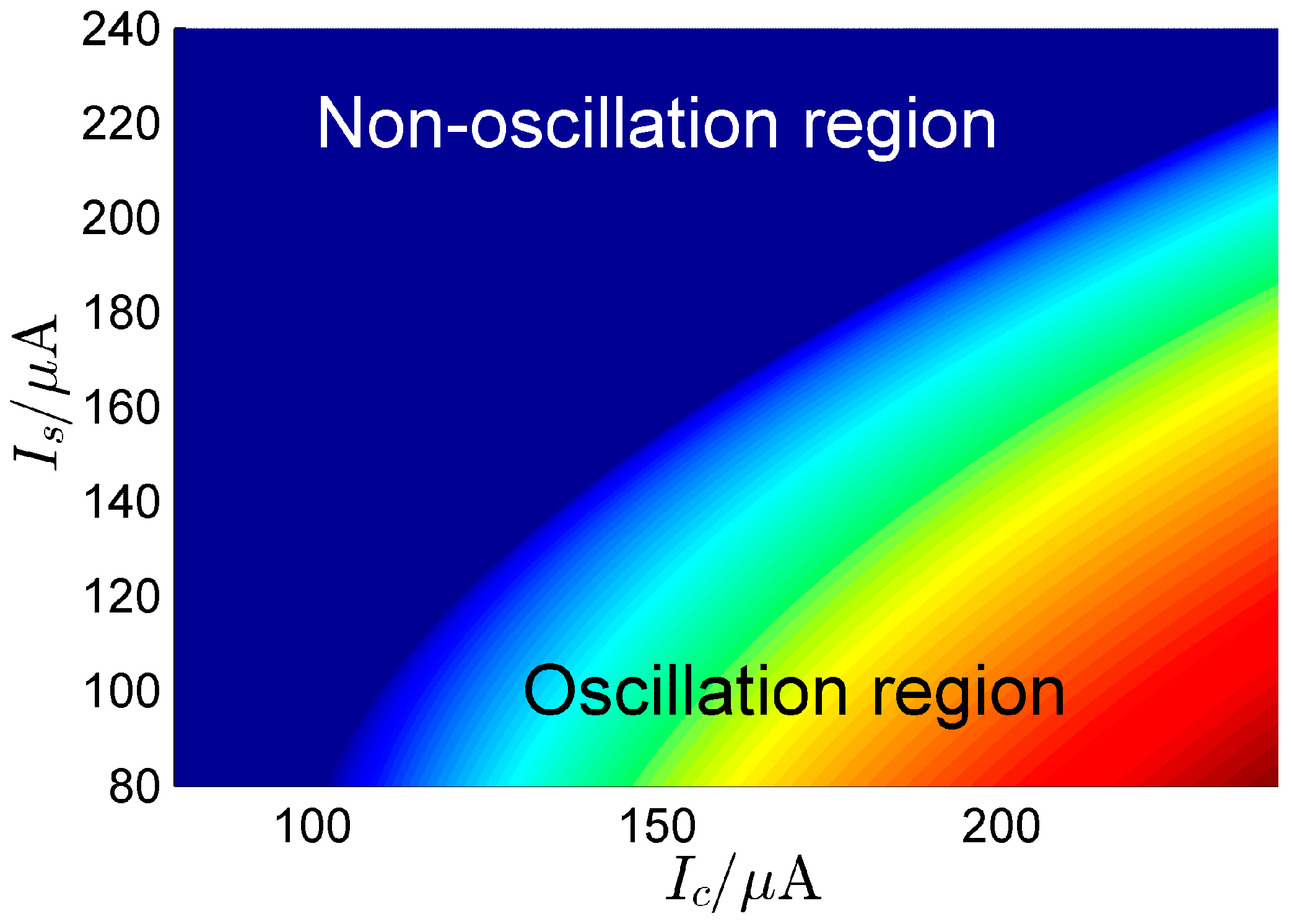
3.2. Relationship between Oscillation Frequency and Currents (Ic,Is)
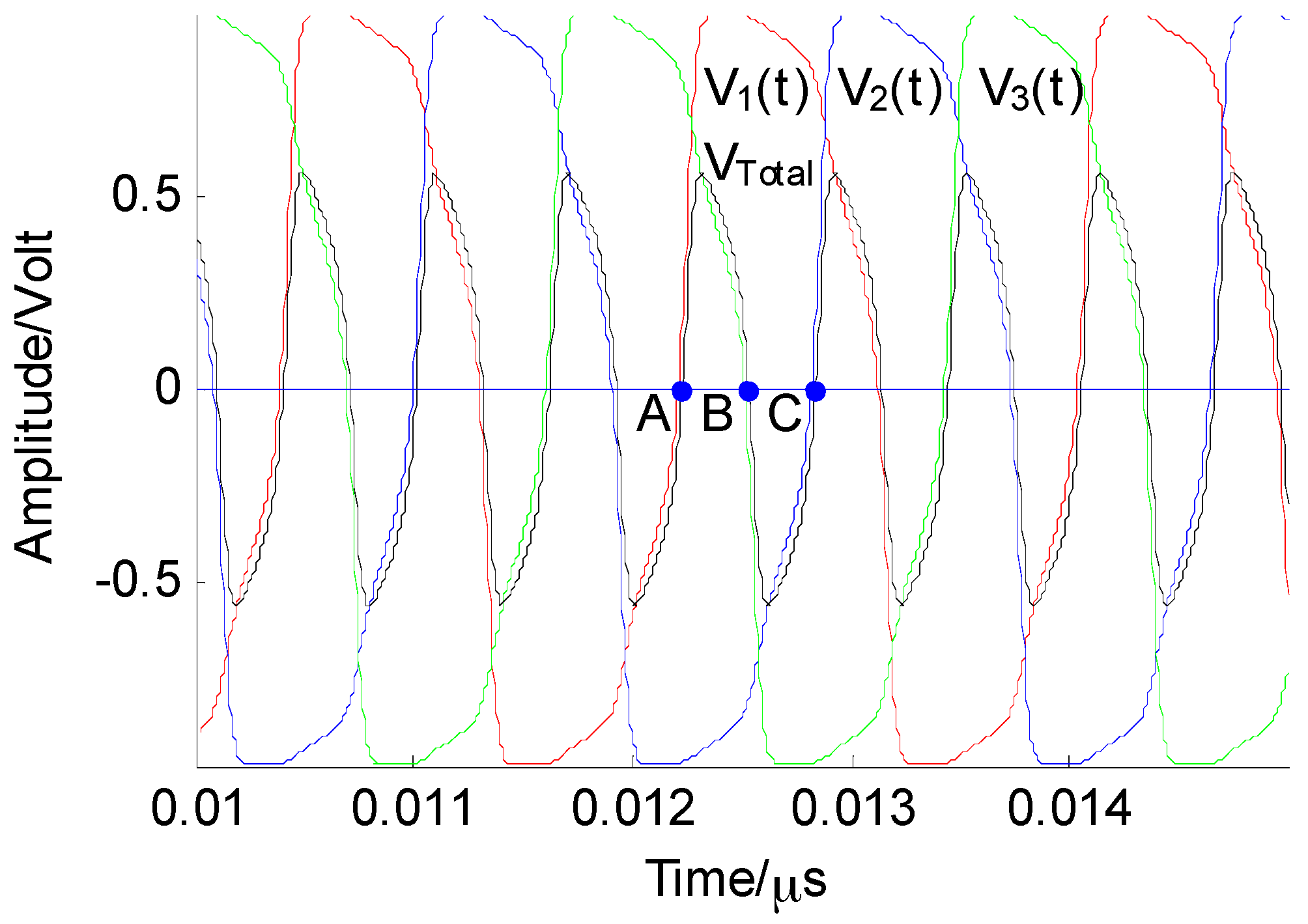
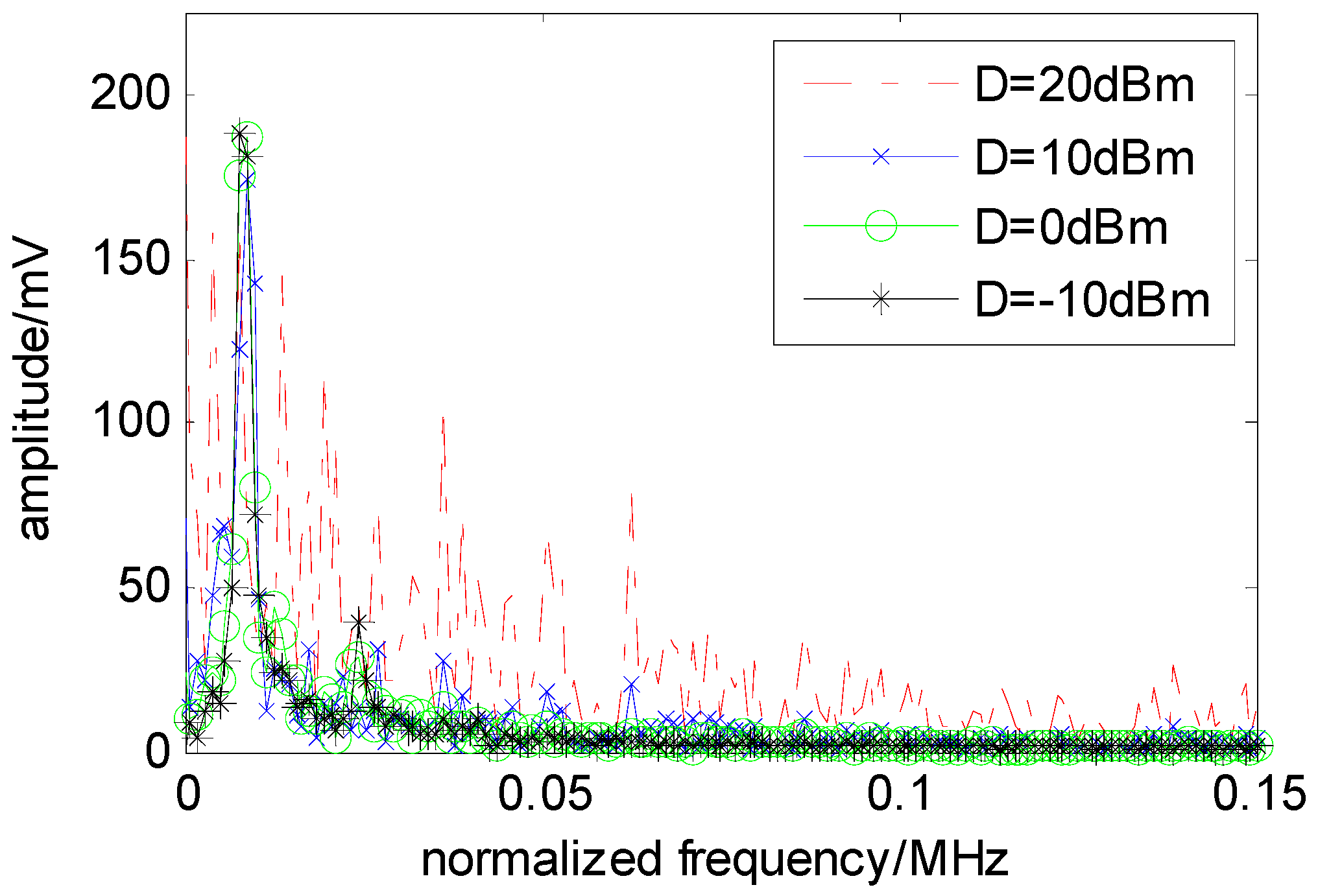
3.3. Spectrum Sensing
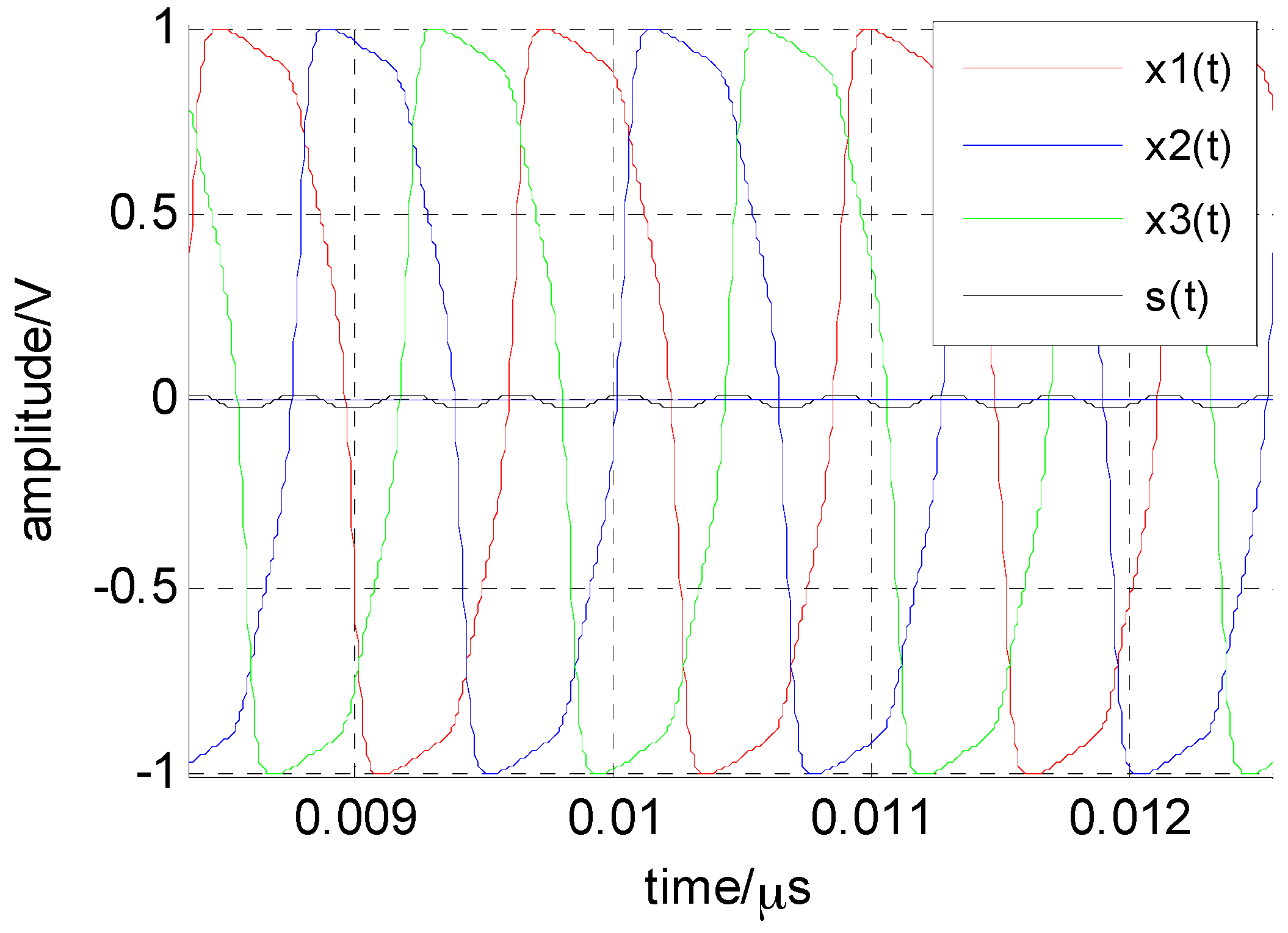
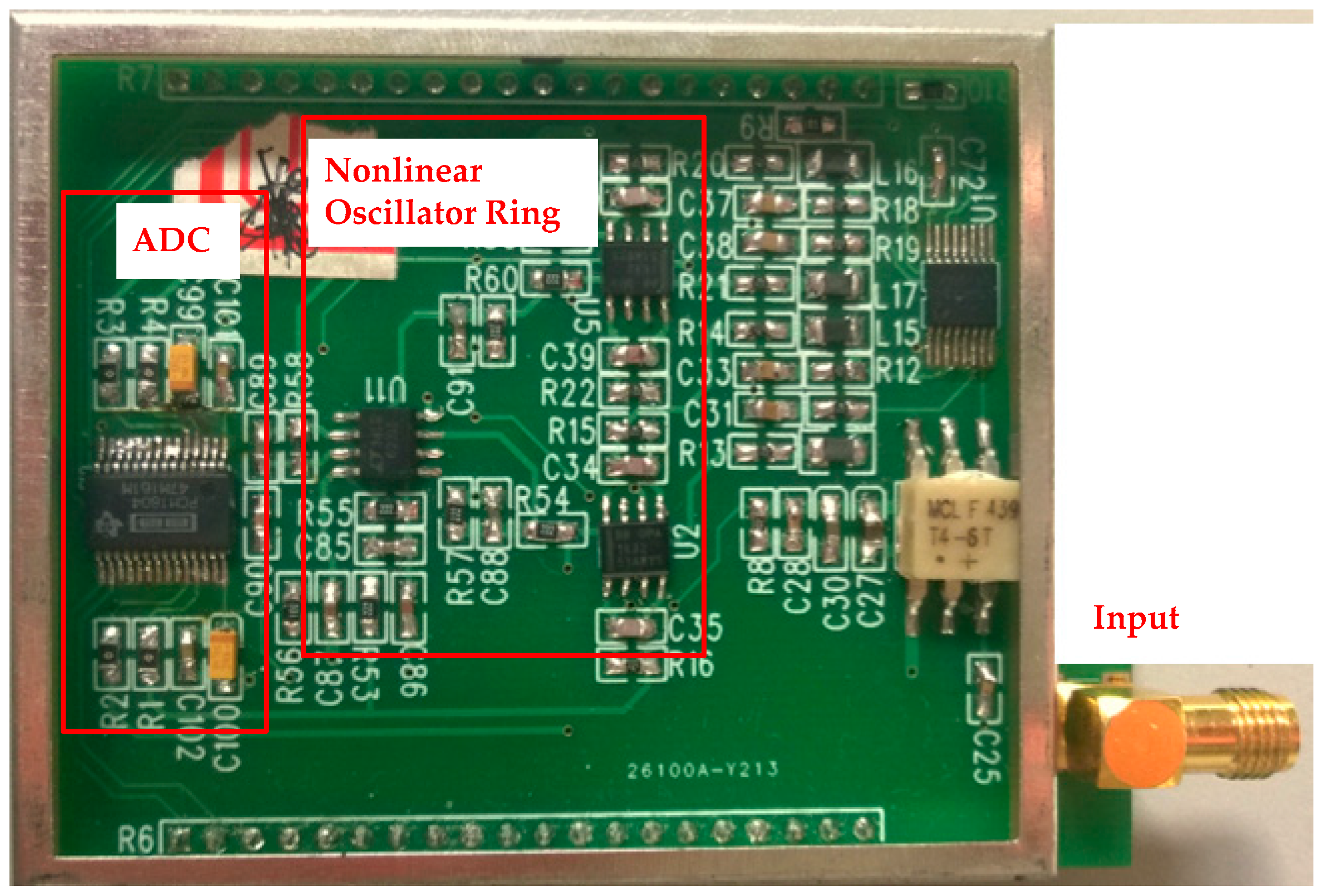
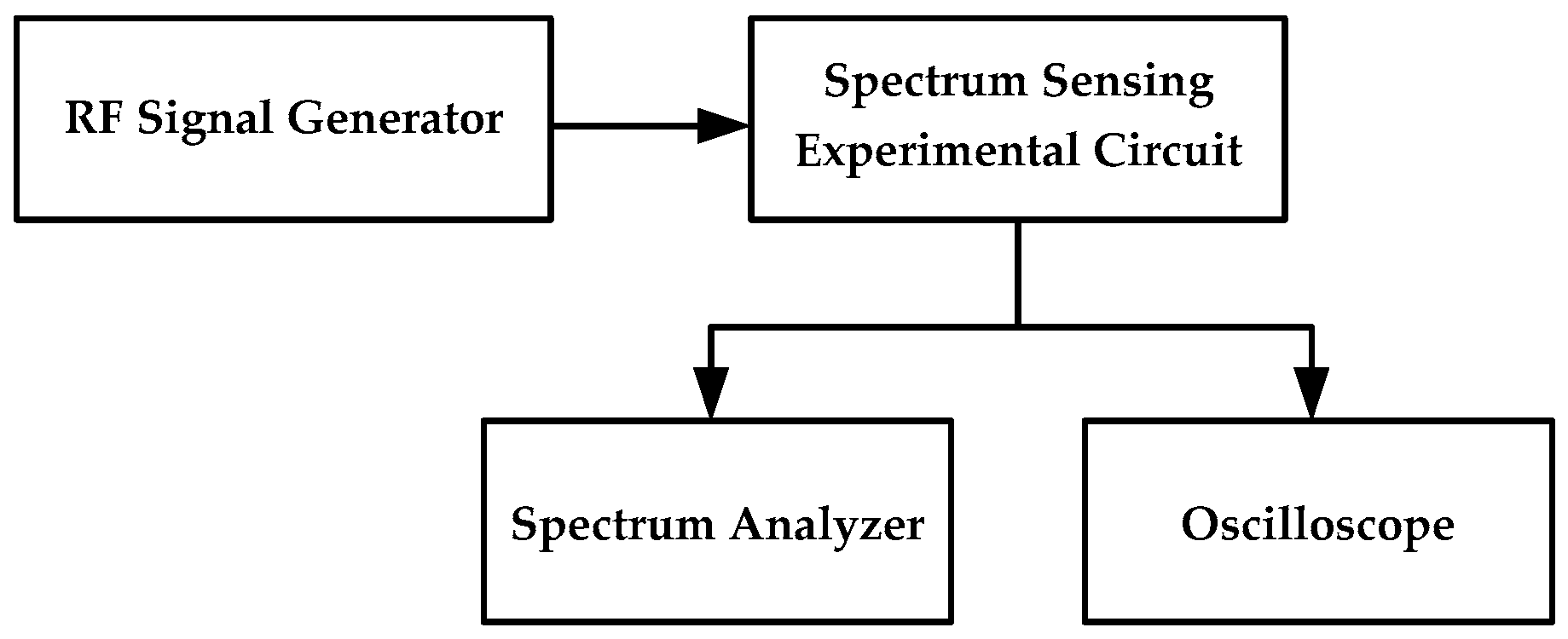
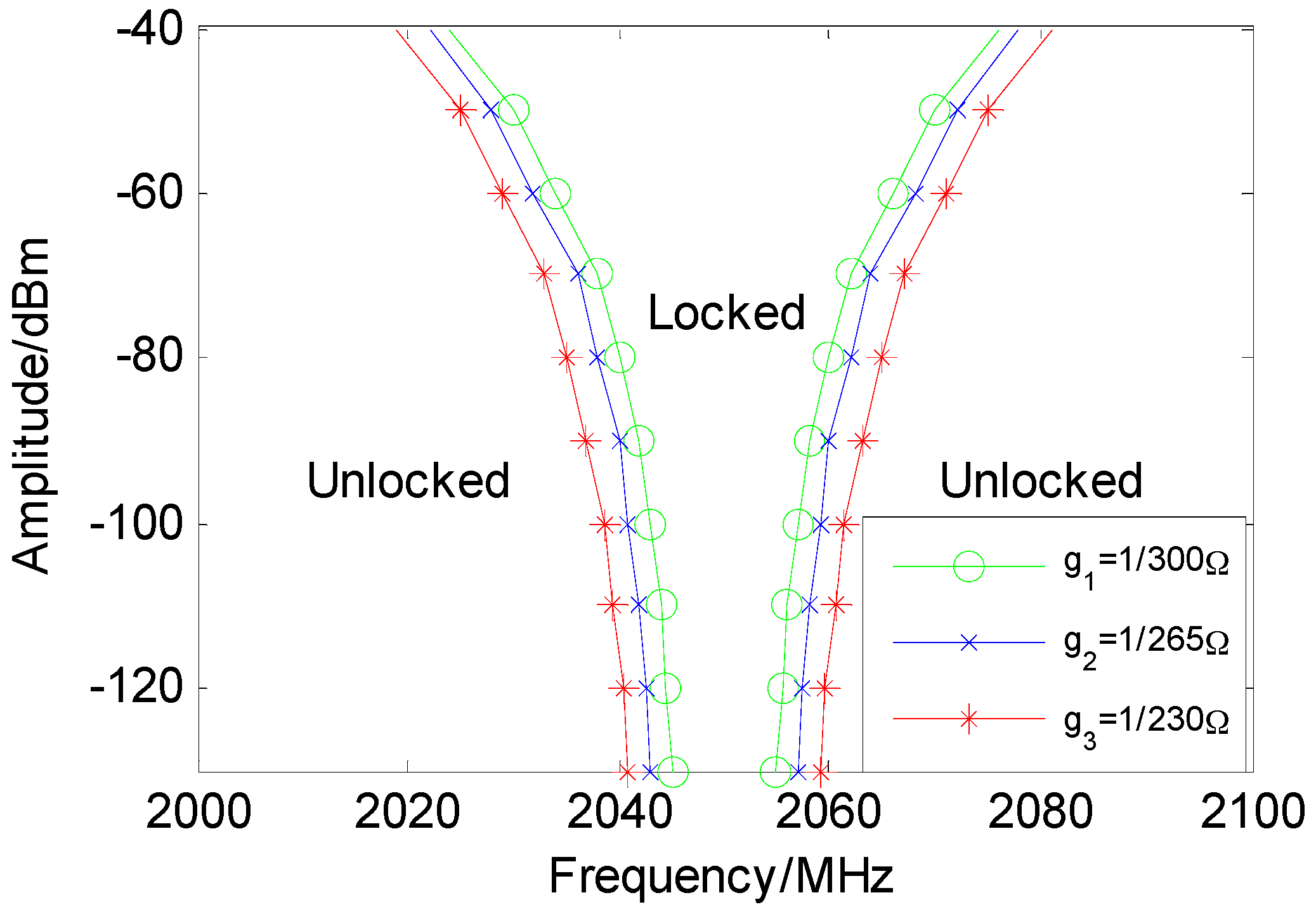
3.4. Circuit Experiments
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Haykin, S. Cognitive: Brain-empowered wireless communications. IEEE J. Sel. Area Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Lu, L.; Zhou, X.; Onunkwo, U.; Li, G.Y. Ten years of research in spectrum sensing and sharing in cognitive radio. EURASIP J. Wirel. Commun. Netw. 2012, 2012, 28. [Google Scholar] [CrossRef]
- Sahai, A.; Hoven, N.; Tandra, R. Some fundamental limits in cognitive radio. In Proceedings of the Allerton Conference on Communication, Control, and Computing, Monticello, UT, USA, 29 September–1 October 2004.
- Sonnenschein, A.; Fishman, P.M. Radiometric detection of spread-spectrum signals in noise of uncertain power. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 654–660. [Google Scholar] [CrossRef]
- Tandra, R.; Sahai, A. SNR walls for signal detection. IEEE J. Sel. Top. Signal Process. 2008, 2, 4–17. [Google Scholar] [CrossRef]
- Gismalla, E.H.; Alsusa, E. Performance analysis of the periodogram-based energy detector in fading channels. IEEE Trans. Signal Process. 2011, 8, 3712–3721. [Google Scholar] [CrossRef]
- Nair, P.R.; Vinod, A.P.; Smitha, K.G.; Krishna, A.K. Fast two-stage spectrum detector for cognitive radios in uncertain noise channels. IET Commun. 2012, 6, 1341–1348. [Google Scholar] [CrossRef]
- Ghozzi, M.; Marx, F.; Dohler, M.; Palicot, J. Cyclostatilonarilty-based test for detection of vacant frequency bands. In Proceedings of the 2nd International Conference on Cognitive Radio Oriented Wireless Network and Communication, Mykonos Island, Greek, 8–10 June 2006.
- Sutton, P.D.; Nolan, K.E.; Doyle, L.E. Cyclostationary signature in practical cognitive radio applications. IEEE J. Sel. Areas Commun. 2008, 26, 13–24. [Google Scholar] [CrossRef]
- Sun, B.; Jiang, J.J. Investigation of sign spectrum sensing method. Acta Phys. Sin. 2011, 60, 110701. [Google Scholar]
- Zeng, Y.H.; Liang, Y.C. Eigenvalue-based spectrum sensing algorithms for cognitive radio. IEEE Trans. Commun. 2009, 57, 1784–1793. [Google Scholar] [CrossRef]
- Kortun, A.; Ratnarajah, T.; Sellathurai, C.M.; Zhong, C.; Papadias, C.B. On the performance of eigenvalue-based cooperative spectrum sensing for cognitive radio. IEEE J. Sel. Top. Signal Process. 2011, 5, 49–55. [Google Scholar] [CrossRef] [Green Version]
- Cui, T.; Tang, J.; Gao, F.; Tellambura, C. Moment-based parameter estimation and blind spectrum sensing for quadrature amplitude modulation. IEEE Trans. Comm. 2011, 59, 613–623. [Google Scholar] [CrossRef]
- Cabric, D.; Mishra, S.M.; Brodersen, R.W. Implementation issues in spectrum sensing for cognitive radios. In Proceedings of the 38th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 7–10 November 2004.
- Zheng, C.Y.; Yang, X.N. Cooperative spectrum sensing for cognitive radios based on a modified shuffled frog leaping algorithm. Acta Phys. Sin. 2010, 59, 3611–3617. [Google Scholar]
- Zheng, S.L.; Yang, X.N. Swarm initialization of shuffled frog leaping algorithm for cooperative spectrum sensing in cognitive radio. Acta Phys. Sin. 2013, 62, 078405. [Google Scholar]
- Kalamkar, S.S.; Banerjee, A. Improved Double Threshold Energy Detection for Cooperative Spectrum Sensing in Cognitive Radio. Defence Sci. J. 2013, 63, 34–40. [Google Scholar] [CrossRef]
- Sun, H.J.; Nallanathan, A.; Wang, C.X.; Chen, Y.F. Wideband spectrum sensing for cognitive radio networks: A survey. IEEE Wirel. Commun. 2015, 20, 74–81. [Google Scholar]
- Wang, L.; Wu, K.; Xiao, J.; Hamdi, M. Harnessing Frequency Domain for Cooperative Sensing and Multi-channel Contention in CRAHNs. IEEE Trans. Wirel. Commun. 2014, 13, 440–449. [Google Scholar] [CrossRef]
- Lai, Z.H.; Leng, Y.G. Generalized Parameter-Adjusted Stochastic Resonance of Duffing Oscillator and Its Application to Weak-Signal Detection. Sensors 2015, 15, 21327–21349. [Google Scholar] [CrossRef] [PubMed]
- Ma, S.S.; Lu, M.; Ding, J.F.; Huang, W.; Yuan, H. Weak signal detection method based on Duffing oscillator with adjustable frequency. Sci. Chi. Inform. Sci. 2015, 58, 1–9. [Google Scholar] [CrossRef]
- Yanchuk, S.; Perlikowski, P.; Wolfrum, M.; Stefański, A.; Kapitaniak, T. Amplitude equations for collective spatio-temporal dynamics in arrays of coupled systems. Chaos 2015, 25, 033113. [Google Scholar] [CrossRef] [PubMed]
- Kenfack, A.; Singh, K. Stochastic resonance in a coupled underdamped bistabe systems. Phys. Rev. E 2010, 82, 046224. [Google Scholar] [CrossRef] [PubMed]
- Suketu, N. Analysis of Nonlinear Bistable Circuits, Applications of Nonlinear Dynamics: Understanding Complex Systems, 1st ed.; Springer-Verlag: Berlin, Germany, 2009; pp. 449–454. [Google Scholar]
- Perlikowski, P.; Yanchuk, S.; Wolfrum, M.; Stefanski, A.; Mosiolek, P.; Kapitaniak, T. Routes to complex dynamics in a ring of unidirectionally coupled systems. Chaos 2010, 20, 013111. [Google Scholar] [CrossRef] [PubMed]
- Nayfeh, A.H.; Balachandran, B. Applied Nonlinear Dynamics: Analytical, Computational, and Experimental Methods, 1st ed.; Wiley-VCH: Berlin, Germany, 2004; pp. 147–152. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| D (dBm) | 20 | 10 | 0 | −10 | −20 | −30 |
|---|---|---|---|---|---|---|
| 2.213 | 2.061 | 2.043 | 2.039 | 2.035 | 2.032 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Z.-L.; Li, S.-M.; Yu, L.-J. RF Spectrum Sensing Based on an Overdamped Nonlinear Oscillator Ring for Cognitive Radios. Sensors 2016, 16, 844. https://doi.org/10.3390/s16060844
Tang Z-L, Li S-M, Yu L-J. RF Spectrum Sensing Based on an Overdamped Nonlinear Oscillator Ring for Cognitive Radios. Sensors. 2016; 16(6):844. https://doi.org/10.3390/s16060844
Chicago/Turabian StyleTang, Zhi-Ling, Si-Min Li, and Li-Juan Yu. 2016. "RF Spectrum Sensing Based on an Overdamped Nonlinear Oscillator Ring for Cognitive Radios" Sensors 16, no. 6: 844. https://doi.org/10.3390/s16060844
APA StyleTang, Z.-L., Li, S.-M., & Yu, L.-J. (2016). RF Spectrum Sensing Based on an Overdamped Nonlinear Oscillator Ring for Cognitive Radios. Sensors, 16(6), 844. https://doi.org/10.3390/s16060844