1. Introduction
Water flow measurement is often critical in the domestic sector of the economy [
1]. Therefore, it is imperative to accurately measure what flows through the pipe under all circumstances, in order to make profit rather than run at a loss. Ultrasonic flow meters have been working successfully in industrial applications for several decades. They have gained approbation in wide metering applications such as dirty or clean water, petrochemical products, and natural gas. This is due to significant operational and economic advantages that the ultrasonic flow meters offer in contrast to conventional meters. Economically, they are easy to install, inexpensive, and require less maintenance than other meters such as mechanical flow meters, which need to be checked periodically. Operationally ultrasonic flow meters can be highly sensitive and accurate, and they typically have a broader flow rate range, good measurement repeatability, and bi-directional flow capability [
2,
3].
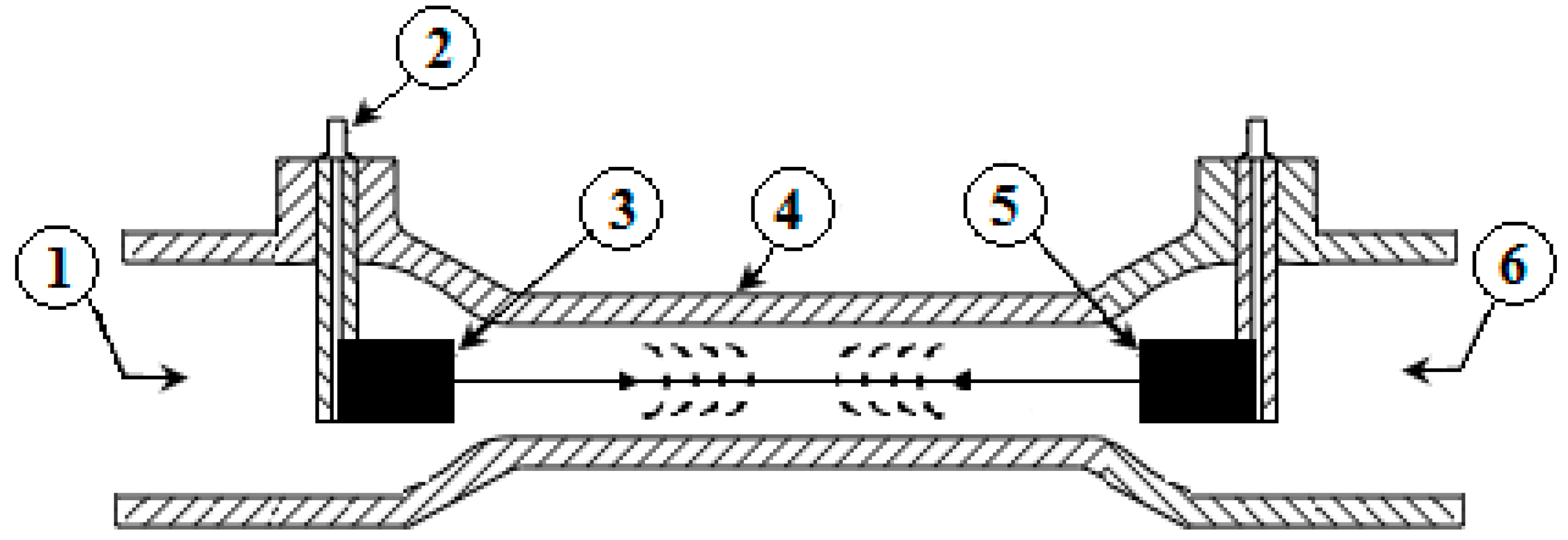
The basic geometry of a transit time ultrasonic flow meter considered in this work consists of two transducers mounted coaxially, as depicted in
Figure 1. The transducers (3 & 5) are separated by a known distance L and face one another such that an ultrasonic signal can be sent from either one and its arrival detected by the other. This signal is generated by the piezoelectric crystal when it is subjected to an alternating voltage; conversely, the piezoelectric crystal generates a voltage when the ultrasonic signal impacts the transducer. The ultrasonic signal can travel through the pipe in the direction of the flow (downstream direction) and against the flow direction (upstream direction). It travels faster in the direction of the flow and slower against the flow. The difference between the two transit times is directly proportional to the flow velocity. This can be mathematically expressed as follows (see
Section 2 for more details):
where Δt is the difference between the upstream and downstream traveling times t
up and t
down, L is the effective length of the travelling-path of the ultrasonic waves (see
Figure 1), and c is the propagation speed of the sound in a given liquid (water in our application).
When there is no flow in the measuring pipe (still water), the upstream and downstream transit times of such meters are the same and the difference between the two transit times should be negligible. This may not be the case since the transit time may be influenced by jitter and offset. Therefore, any delay offset between the upstream and downstream transit times translates directly to a zero-flow error. This zero-flow offset limits measurement accuracy at low flow velocities. The smaller this error is, the more accurate the flow meter will be.
Several approaches have been proposed in the literature to detect accurately the transit time difference (TTD) of an ultrasonic flow meter. The zero-crossing method is commonly used and consists of detecting the zero-crossings of the received signals in the upstream and downstream directions [
4]. These zero-crossings are compared with the corresponding zero-crossings of the transmitted signals in the upstream and downstream directions, and the difference is taken to be the transit time. Based on this method, Texas Instruments reported [
5] an 80 ps peak-to-peak jitter and TTD-offset drift of about 25 ps measured at no-flow conditions.
Yang et al. reported [
6] an approximately 200 ps peak-to-peak jitter and −185.3 ps TTD-offset drift measured at no-flow conditions. Their approach consisted of driving both transducers at a specific frequency outside their resonance frequencies in order to eliminate the effect of temperature dependence of the resonance frequency. However, the main drawback of this technique is the degradation of the signal-to-noise ratio (SNR), caused by working outside the resonance frequency of the transducers.
As mentioned before, the main challenge facing the ultrasonic transit time flow meters is to measure the TTD in the picosecond range. In our approach, this is achieved by deducing the TTD from the phase difference, with a sine wave excitation, between the upstream and downstream received signals. The phase difference is estimated using the least-square-sine-fitting (LSSF) method, which is a very accurate method to estimate all parameters (amplitude, phase, and frequency) that characterize a digitized sinusoidal signal, sampled at a well-defined sampling rate [
7,
8].
This paper presents a new approach to measure accurately the water flow based on ultrasonic devices. We describe first the methodology employed to compute the TTD. We then investigate the impact of the jitter noise on the measurement accuracy and how to reduce the jitter and the TTD-offset drift using the proposed method. We analyze the obtained measurement results and compare them with the theoretical background.
2. Transit Time Flow Meter Principle
The ultrasonic signals travel through the pipe in the direction of the flow (downstream direction) and against the flow (upstream direction), during a time interval called transit time, in order to be received by the opposite transducer. Assuming v is the flow velocity in the pipe, the upstream and downstream transit times t
up and t
down are given by [
9,
10]
Assuming
(flow velocity v is much smaller than the speed of sound c),
hence,
When there is no-flow in the pipe,
The ratio of Δt to the traveling time t
0 measured at no-flow conditions is given by
Equation (8) can be used to calculate the needed measurement accuracy. For instance, the minimum flow velocity vmin calculated for a given flow rate of two liters per hour (2 l/h), and a pipe diameter of 0.8 cm is about vmin = 10 mm/s. Therefore, according to Equation (5), this minimum flow velocity of 10 mm/s produces a TTD value of about Δt = 380 ps, provided that the travelling time of the used flow meter pipe is 28 µs (calculated for L = 42.2 mm using Equation (7)). Therefore, to achieve an accuracy of 5%, the desired ultrasonic flow meter must be able to measure accurately a minimum transit time difference value of at least 20 ps.
3. System Description
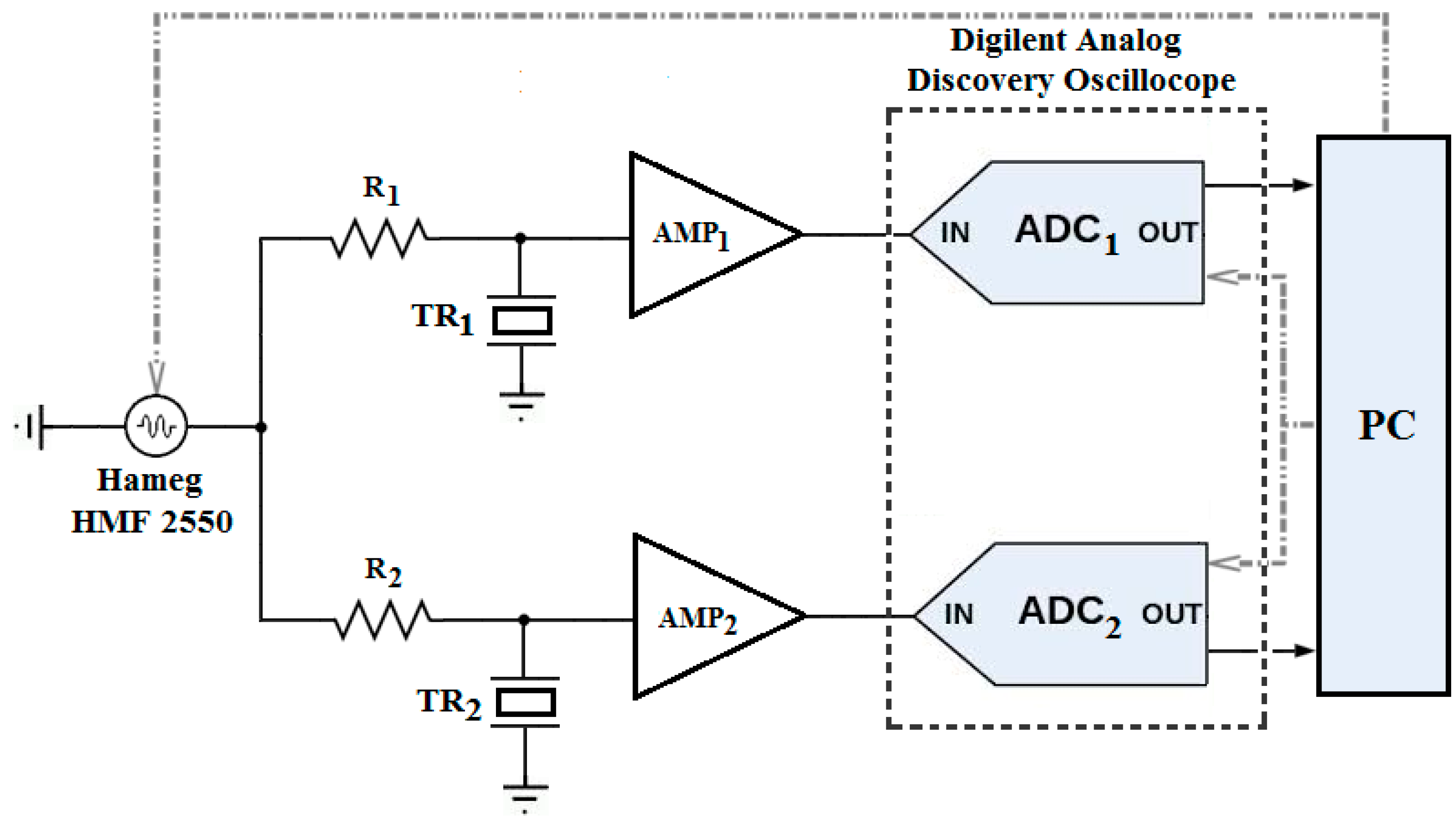
The principle of operation of the system used in the experiments is illustrated in
Figure 2. In order to allow the receiving transducer to reach a steady state, where both amplitude and frequency are settled, a sinusoidal burst of 70 cycles generated over a time period of 100 ms by a function waveform generator Hameg HMF 2550 (Rohde & Schwarz Co. KG, Munich, Germany) is used to drive the two transducers (TR
1 and TR
2) simultaneously through the resistances R
1 and R
2. These transducers convert the electrical excitation into a mechanical wave. The driving frequency of the burst is selected near the transducers resonance frequencies so that the transducers achieve maximum output vibration with an enhanced SNR.
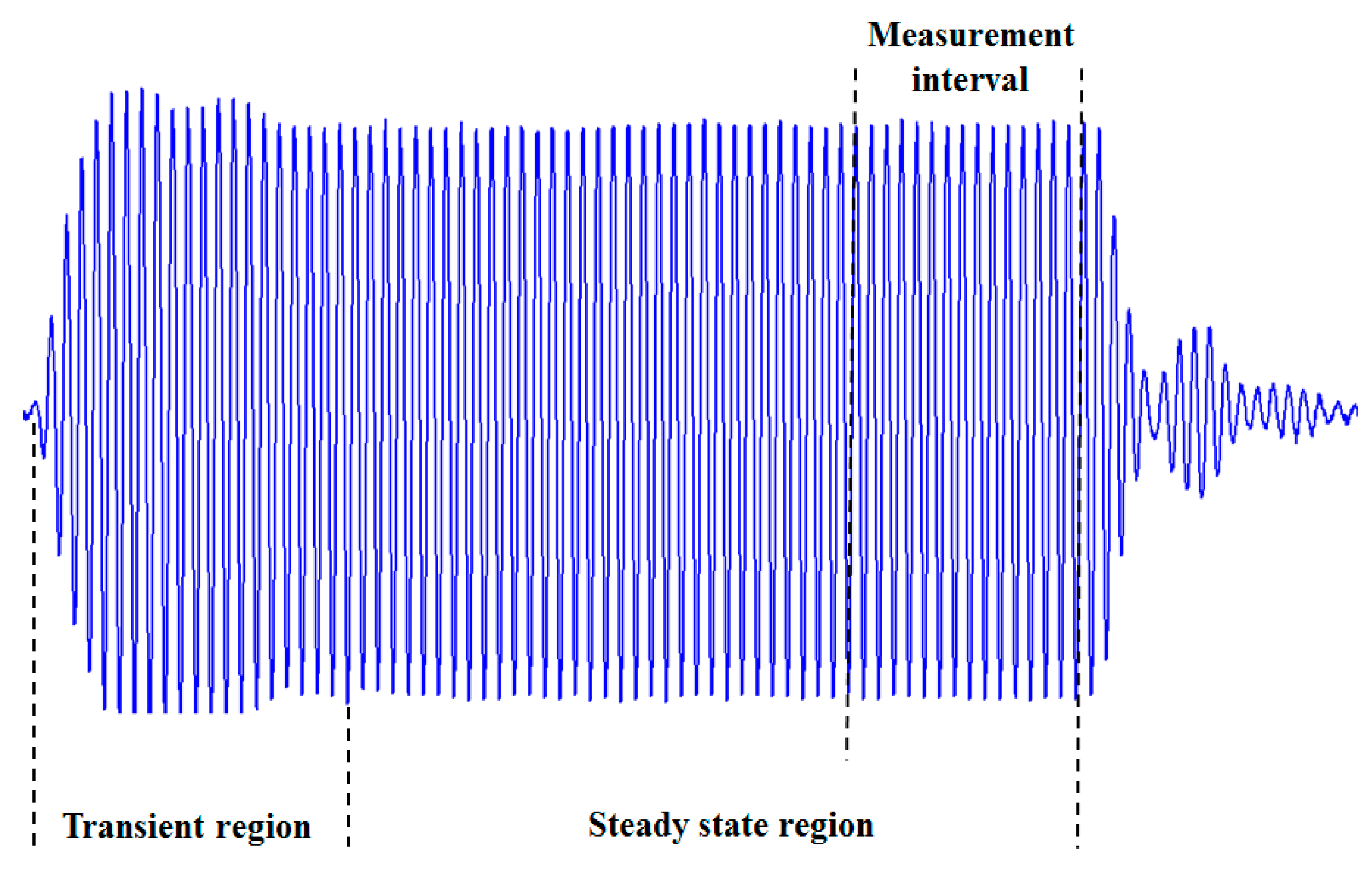
The TTD can be deduced from the phase difference between the steady-state parts of the received signals in the upstream and downstream directions, where the estimation of the two phases can be performed using the least-square-sine-fitting algorithm of Matlab.
where
and
are the phase shifts measured during the steady-state regions (
Figure 3) in the upstream and downstream direction respectively. In the steady-state region, the received signal frequency f matches the forced frequency (the driving frequency of the exciting signal). Therefore, the TTD can be computed from
In order to eliminate the high starting jitter, caused by triggering and recording the ultrasonic signals in both directions separately (sequentially), we rely on the simultaneous (synchronous) excitation approach. This means that the common synchronized clock of the digital oscilloscope (Digilent Analog Discovery) [
11] is used to trigger and acquire the signals in both directions. Hence, we cancel any differential delay time between the two input channels.
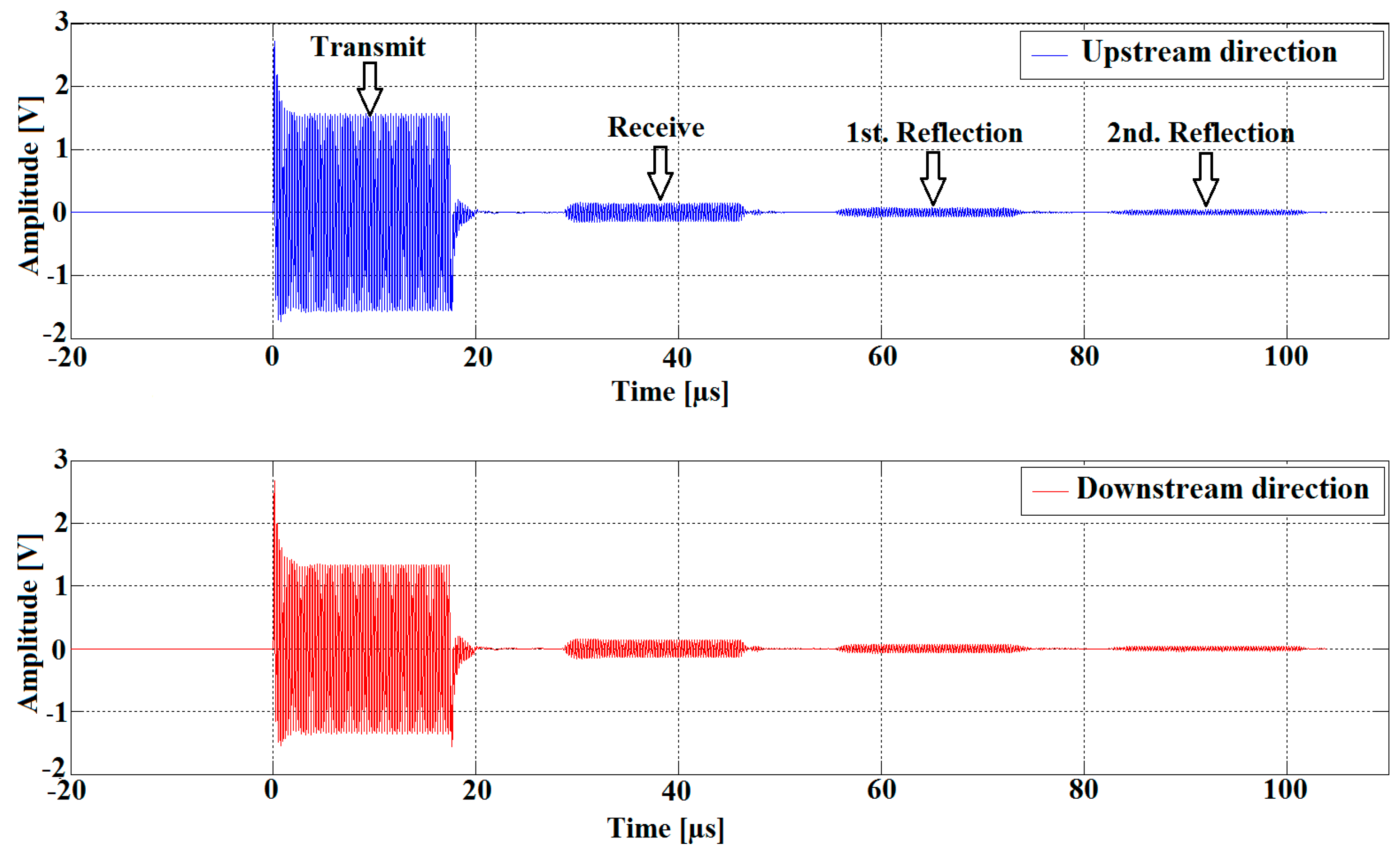
As shown in
Figure 4, the sound waves are received simultaneously by both transducers after a traveling time proportional to the distance between the transducers. The received signals are attenuated due to the losses and the absorption of acoustical energy by the medium [
12]. Therefore, we use two low noise operational amplifiers OPA2846ID (Dallas Semiconductor Inc, Dallas, TX, USA), as shown in
Figure 2, in order to increase the signal levels and thus improve the SNR. The amplified signals are acquired by the digital oscilloscope, which uses dual-channel, 14-bit, ADCs with a sampling rate of 50 MS/s. The samples are saved in CSV data format and imported to the PC in order to compute the TTD. An embedded (PC) software algorithm written in Matlab handles the automatic TTD measurement repetition, providing all the control subprograms for the control of the function generator and digital oscilloscope.
4. Effect of Jitter on TTD
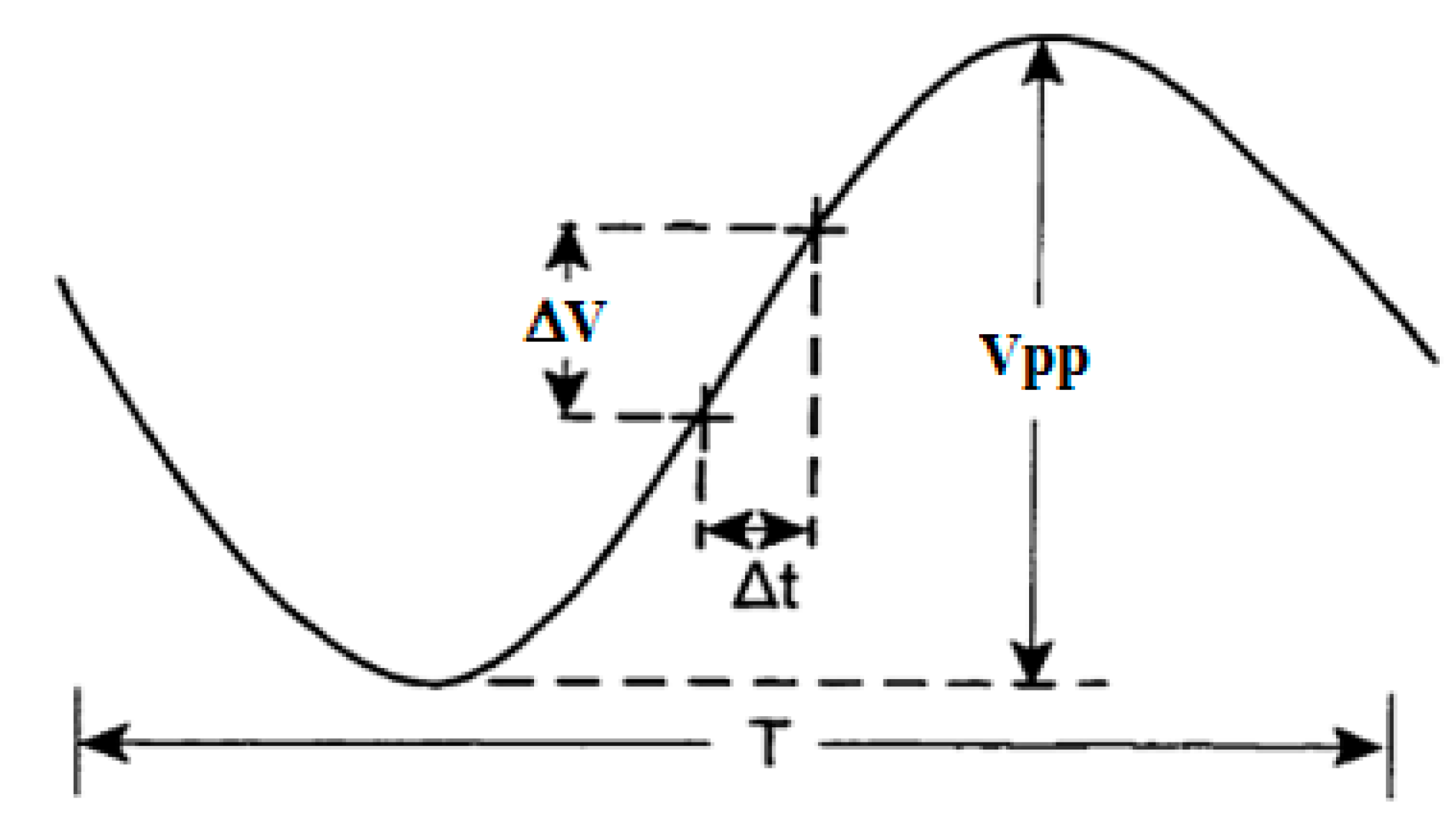
Jitter is the dispersion of the measured TTD around the mean value (zero for no-flow). Commonly, it refers to the random errors in the time location of the waveform samples. The latter introduces corresponding errors in the amplitude value. As depicted in
Figure 5, the jitter can be defined as a deviation of the sampling instant of a given signal from their ideal location in time (x-axis) influencing proportionally the y-axis (amplitude of the signal). Concerning our application, for an assumed sine wave (ultrasonic waveform in the steady-state) of period T and peak-to-peak amplitude Vpp, a sampling time jitter Δt, near t = 0, will cause a change in the measured value equal to ΔV = Vpp π Δt/T [
13].
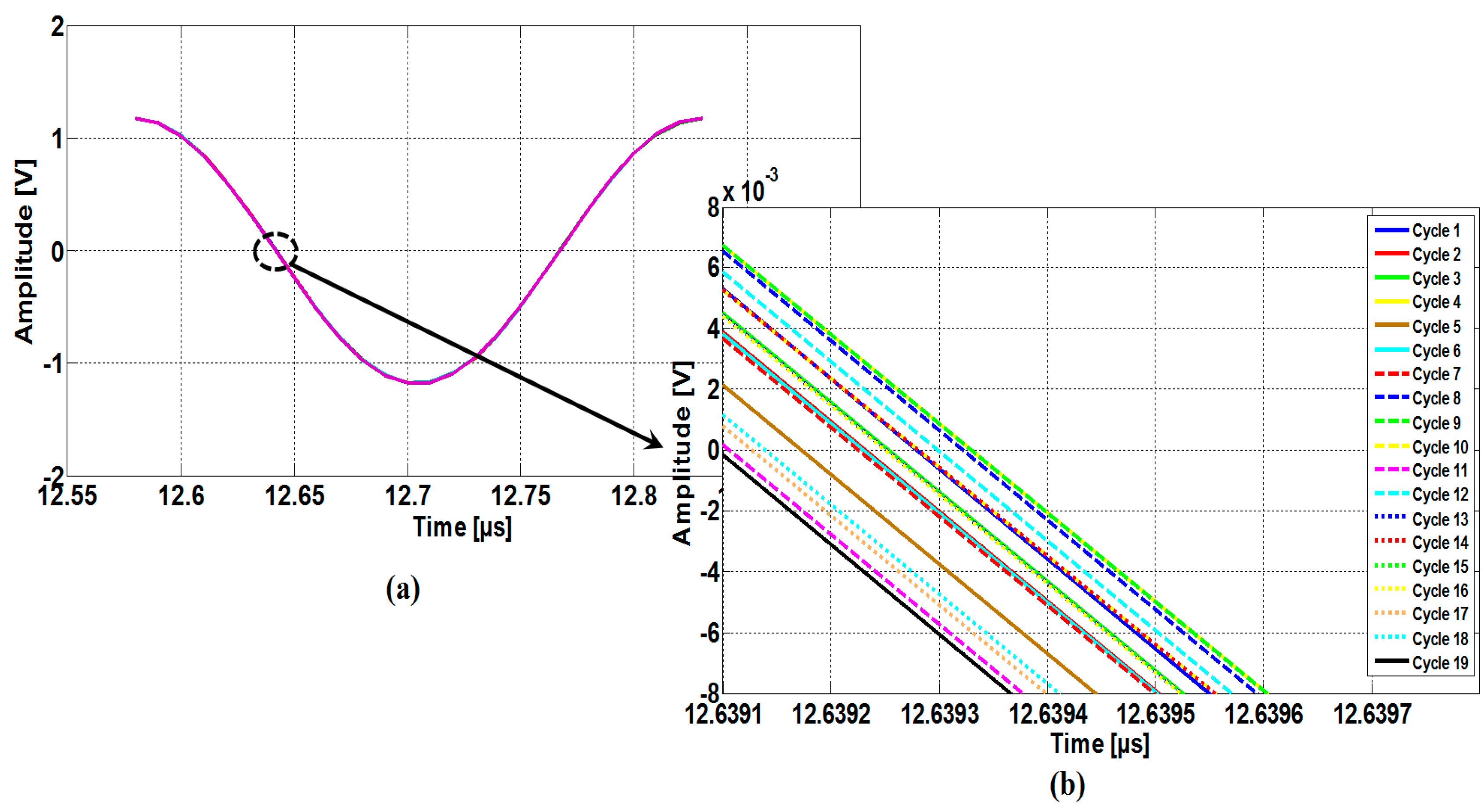
Typically, the transducers are excited by a sinus burst of 70 cycles at a frequency of 4 MHz. The experimental results, reported in
Figure 6, presents the eye diagram of the last 19 periods of the transmitted signal superimposed upon each other.
Figure 6b shows a magnification of
Figure 6a. The average of T, in the steady-state region, is 250 µs, whereas the cycle-to-cycle jitter noise is about 200 ps (peak-to-peak). This deviation leads to an amplitude fluctuation of about 7 mV.
This jitter can be explained by the fact that the transducer structure consists of small crystallites or grains [
14]. When the latter are excited periodically by an external burst of a finite number of cycles, there is a remaining irregular stress between these small crystallites, which is expected to occur during the next oscillation of the transducer. Moreover, the signal acquisition path contains many additional jitter sources, such as jitter in the sampling time that may occur due to imperfect hold circuit synchronization, quantization error of the ADC, and cross-talk between the cables [
7].
5. Jitter Reduction Technique
Since the recorded data of the received waveform are sampled with a sampling rate of 50 MS/s, each period in the steady-state region contains around 13 sample points. The sine-fitting approach adjusts Equation (12) to the set of recorded sampling data in order to extract the characterized parameters of the trace, namely, the amplitude, the phase and the frequency.
where A and
are the amplitude and the phase of signal, respectively, f is the driving frequency, and t
n is the discrete-time vector.
The following equation, obtained from Equation (11), is used to compute the TTD from the upstream and downstream extracted phases (
,
:
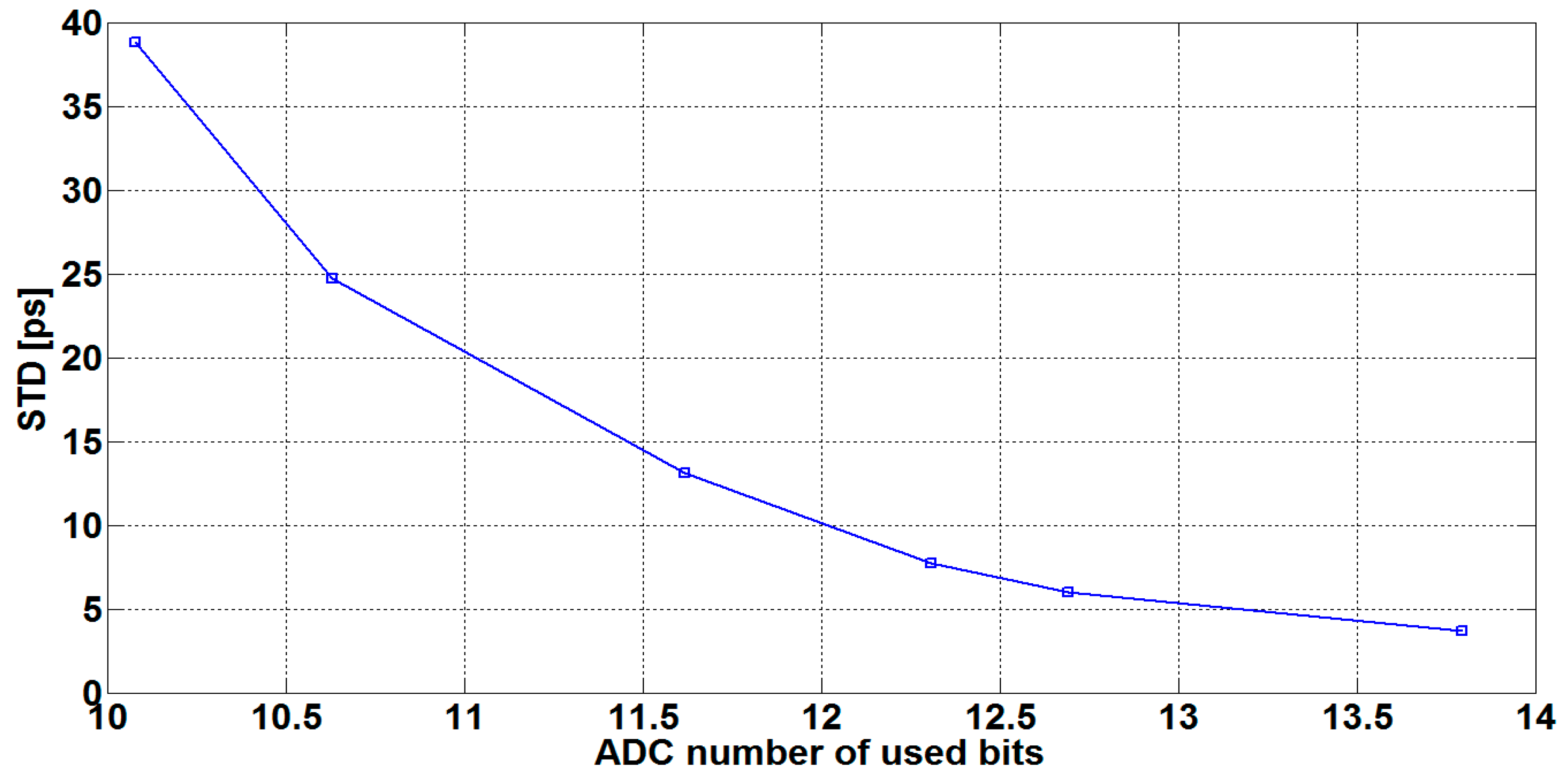
The precision with which the TTD is determined can be influenced by two parameters: the amplitude of the received signal and the number of the samples used in the fitting algorithm. Concerning the first parameter, there is a clear correlation between the jitter level and the amplitude of the received signal in the steady-state region. In other terms, the obtained TTD has a jitter that depends on the input dynamic range of the ADC. This is optimized through the adjustment of the gain of the two amplifiers (
Figure 2), aiming to cover most of the input range of the ADC. The ADC dynamic range, which is the ratio of the maximum voltage V
FRS to the minimum voltage V
LSB, can be expressed as the number of bits or the resolution.
Figure 7 illustrates the jitter measurement precision (represented by the standard deviation) versus the number of the ADC used bits. The standard deviations are calculated from TTDs of 50 captured ultrasonic waveforms. The measurements were carried out at room temperature at no-flow conditions, and N = 250 fitted samples.
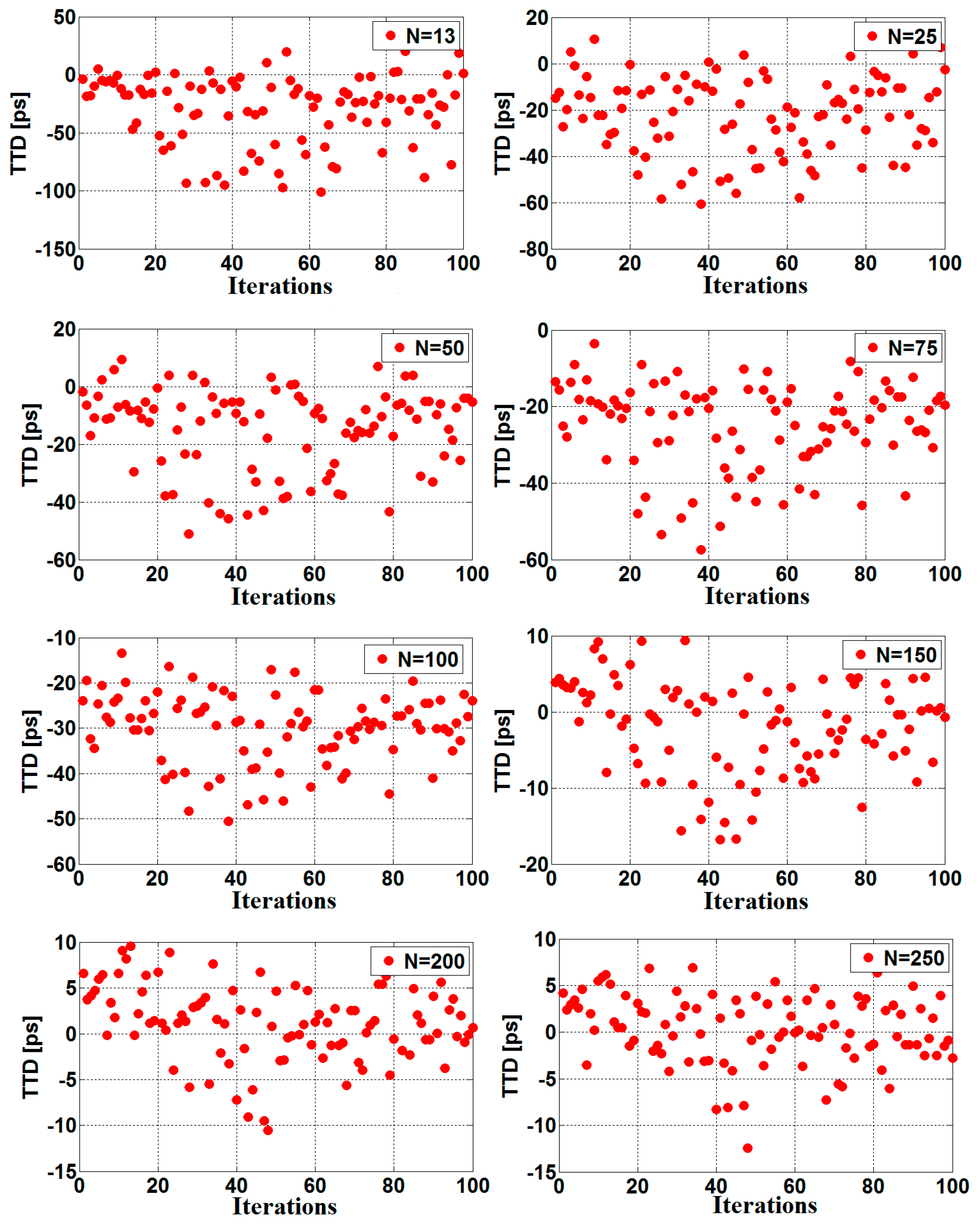
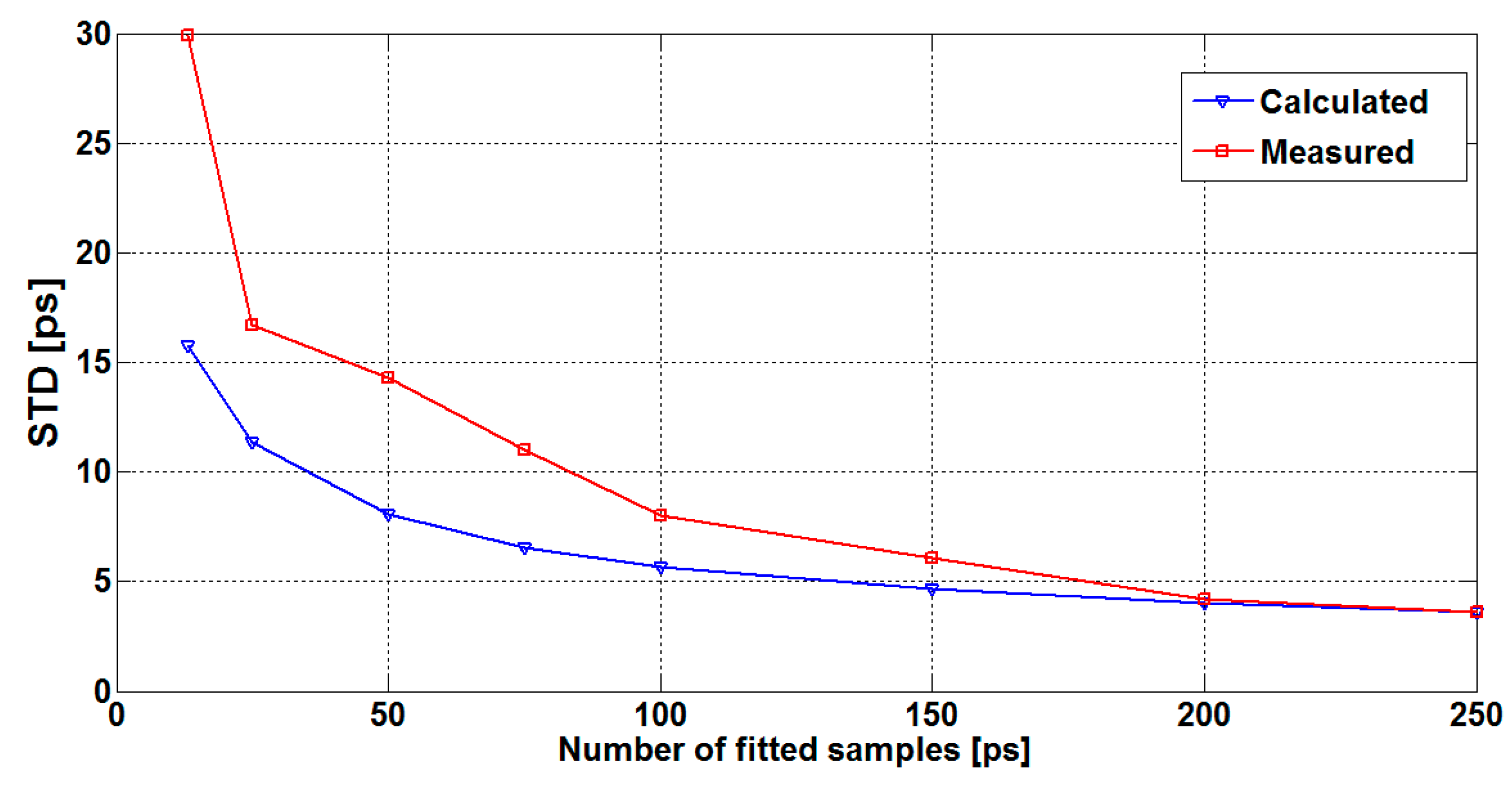
As mentioned previously, the jitter can also be reduced through increasing the number of the signal samples, used to adjust the sine-fitting parameters. Since the noise present at each sampling sequence is uncorrelated, a given number of samples N reduces the timing jitter values by a factor of
(according to the averaging principle).
Figure 8 depicts a single TTD measurement carried out at room temperature and no-flow conditions for different numbers of the fitted samples.
Figure 9 illustrates the measured TTD standard deviation (STD) versus the number of fitted samples, as well as the theoretical limits estimated using Equation (15). Based on these results, it can be deduced that the measured jitter exhibits the same behavior as the calculated one. In other words, as the number of samples increases, the standard deviation of the measured TTD decreases, according to Equation (15).
6. Zero Flow TTD-Offset Correction
As mentioned before, in order to eliminate the possibility that the meter detects a false flow under no-flow conditions, the upstream and downstream transit times should be ideally the same, but this may not be the case unless special precautions are taken. Due to the fact that every flow direction exhibits a slightly different electrical impedance compared to the other, this leads to a dissymmetry between upstream and downstream signal paths (in term of the electrical impedances of the electronics and the transducers employed in the meter) [
15] and causing different amplitudes in the two upstream and downstream transmitted signals.
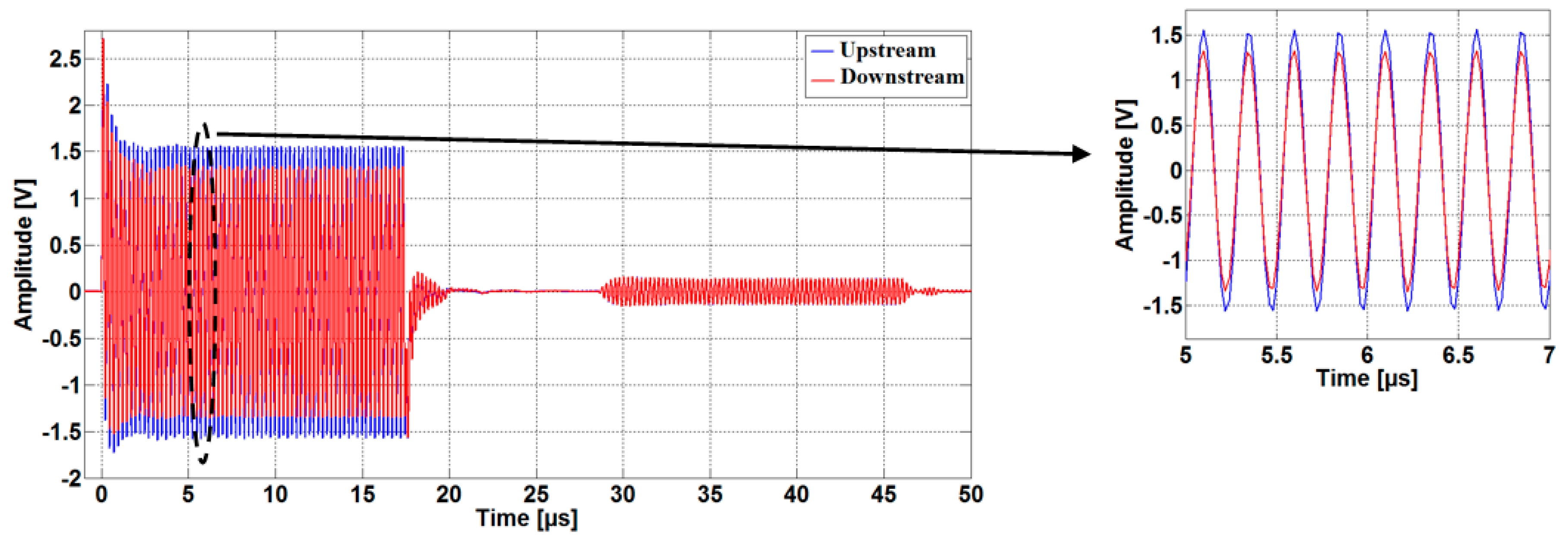
Figure 10 shows a measurement results carried out at room temperature and no-flow conditions. Both transducers are excited with the same sinus burst at a 4 MHz forced frequency. The 250 mV transmitter amplitudes difference seen in
Figure 10 results in about a 150 ps zero-flow TTD-offset.
Irrespective of the mismatch of the transducers, the variation of the resonance frequency with the operating temperature range [
6,
16,
17,
18] can cause a dissymmetry between the two directions of the ultrasonic signal paths. Thus, the temperature variation of the medium is the main reason for the zero-flow TTD-offset drift.
In order to effectively eliminate TTD-offset at no-flow conditions, a matching between the upstream and downstream electrical impedance of both transducers and their associated electronic is required to reach a highly symmetrical signal path. According to the literature [
19], the electrical impedance of a transducer can be controlled by the forced frequency. We have used this feature to eliminate the electrical impedance mismatch between both directions, because a well-matched upstream downstream signal path reduces the transmitter amplitudes difference and results in a very small zero-flow TTD-offset.
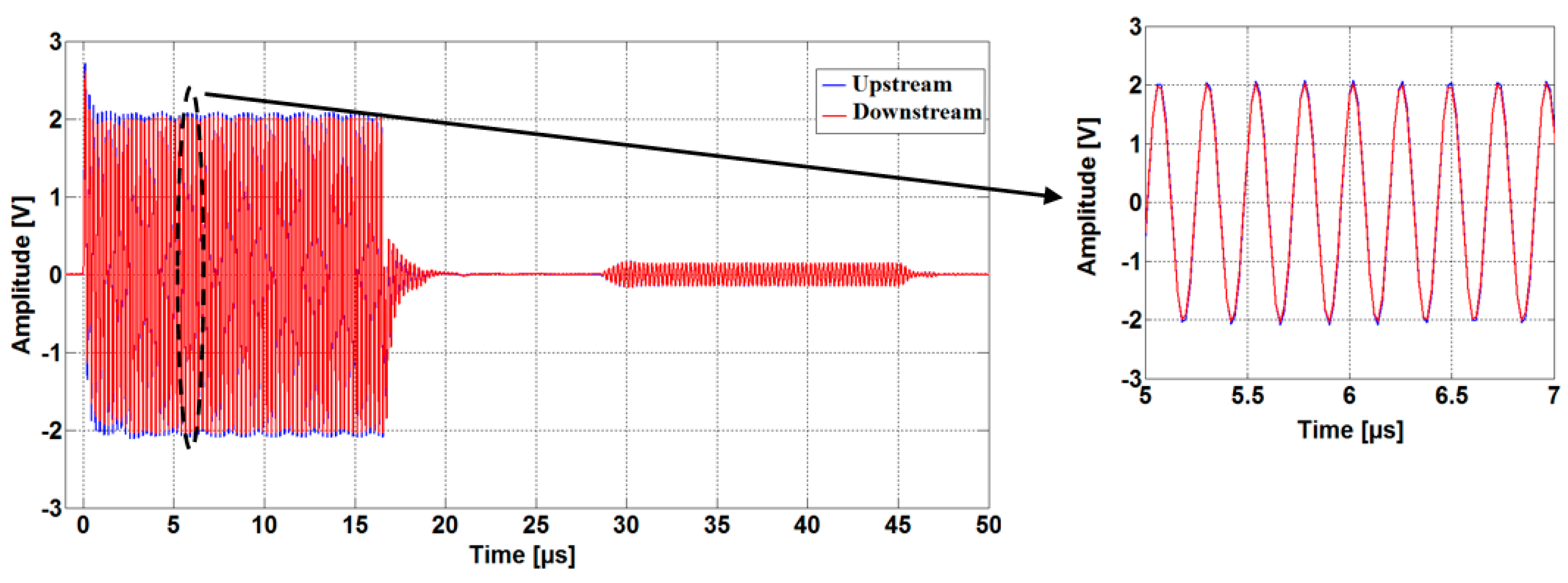
By changing the sinus burst frequency from 4 MHz to 4.19 MHz, the 150 ps zero-flow TTD-offset measured previously is reduced substantially to less than 5 ps (
Figure 11). Moreover, comparing the measured transmitted signals depicted in
Figure 10 and
Figure 11, it can be observed that the difference between the two amplitudes is reduced from 250 mV measured at 4 MHz to less than 15 mV achieved by exciting the transducers at 4.19 MHz forced frequency under the same previously mentioned conditions.
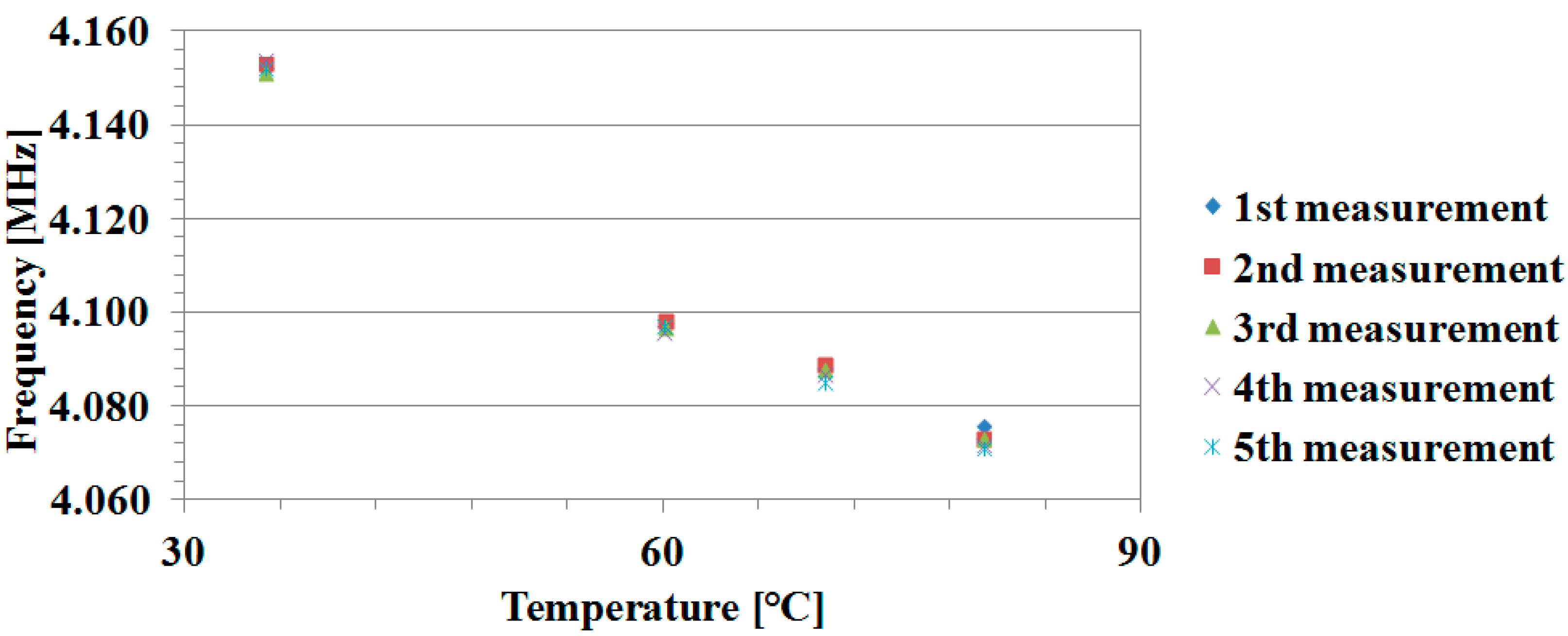
As a summary, choosing the correct forced frequency can drastically reduce the zero-offset error. To realize an automatic compensation, one needs to accurately set the forced frequency suitable to eliminate the offset caused by the temperature variation inside the pipe. In order to ensure the repeatability or the precision of the driving frequency used to compensate the zero-flow offset, several experimental measurements have been performed at four randomly chosen different temperatures (35 °C, 60 °C, 70 °C, and 80 °C). These experiments lead to the results illustrated in
Figure 12. Therefore, we have shown that there is a clear, simple, stable, and reliable relation between the needed excitation forced frequency and temperature.
7. TTD Measurement Results and Analysis
The measurement flow meter pipe used in the experiments is a D-Flow pipe provided by Ultrasonic Technology of Sweden (
Figure 1), with a length L = 42.2 mm and an inner diameter is 8 mm. The piezo-based transducers are made of polyetheretherketone (PEEK).
The TTD value is evaluated based on 250 samples taken from the last 20 cycles of the steady-state region for both received signals. For each measurement setup, the TTD is computed several times with a repetition rate of about 1.6 s. In order to emulate the operation temperature from around 25 °C to 80 °C, the flow meter pipe is put in a water bath, with a thermostat to regulate the temperature around the transducers. The temperature of the transducer can be considered the same as the still water filled inside the pipe.
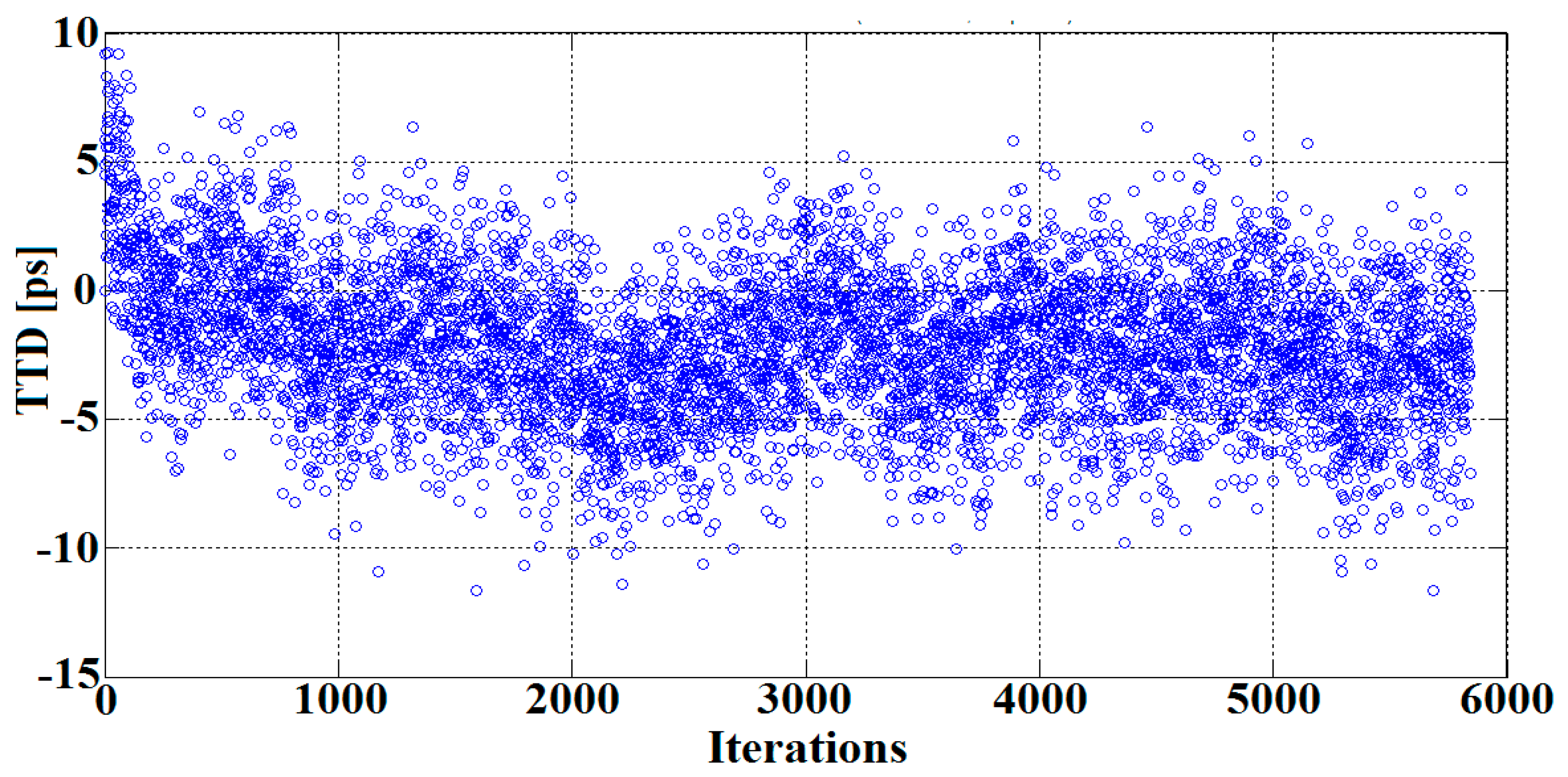
Figure 13 illustrates the TTD measurement results obtained at 80 °C fixed temperature. Based on this result, the measured jitter is in the range of 4 ps (evaluated as a standard deviation). With respect to 80 °C, the zero-flow TTD-offset adjustment was reached by tuning the forced frequency of the exciting burst to 4.075 MHz.
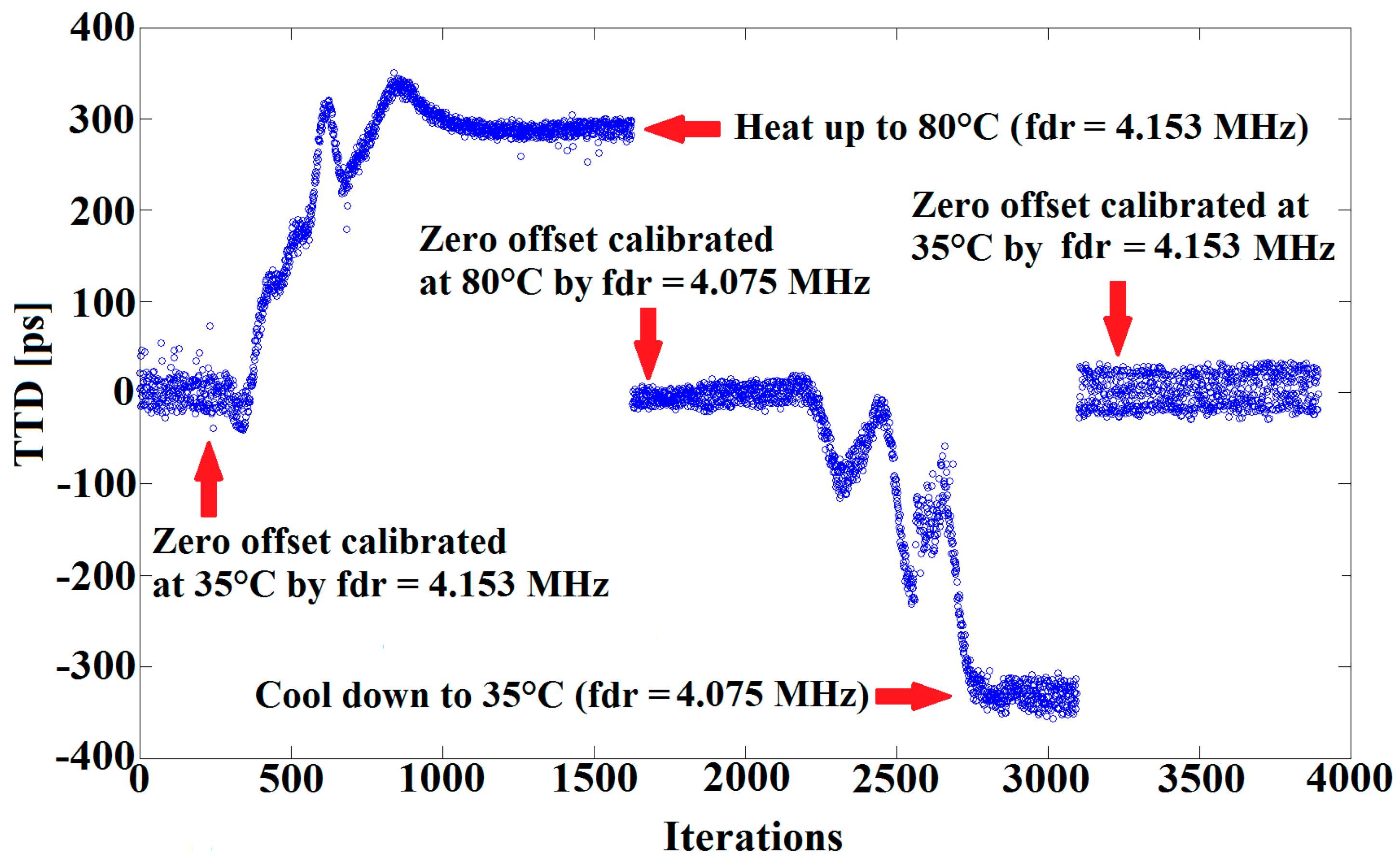
Figure 14 provides the results for zero-flow TTD-offset calibration, using an appropriate forced frequency with respect to medium temperature. The results below show a reduction of the TTD-offset to almost zero over a temperature range from 35 °C to 80 °C. This is achieved by optimizing the impedance matching of both upstream and downstream signal paths using the correct forced frequency.
8. Conclusions
The assumption established throughout this work is that the proposed jitter and zero-flow TTD reduction approaches considerably enhance the measurement performances. As it can be inferred from the experimental results, the standard deviation of the jitter is reduced drastically through using the sine-fitting technique. Furthermore, the system accuracy is carried out one step further by exploring two techniques, namely, using low noise amplifiers to improve the system dynamic range and an adequate number of samples in a specific time interval (steady-state region). Moreover, the present work proposed a new improved method to eliminate the zero-flow TTD-offset and TTD-offset drift. This method is based on the principle that continuously adjusting the forced frequency nearby the resonance working area of the transducers according to a specific strategy reduces the zero-flow TTD-offset to zero.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













