
Real-Time Identification of Smoldering and Flaming Combustion Phases in Forest Using a Wireless Sensor Network-Based Multi-Sensor System and Artificial Neural Network

Abstract
:1. Introduction
2. Materials and Methods
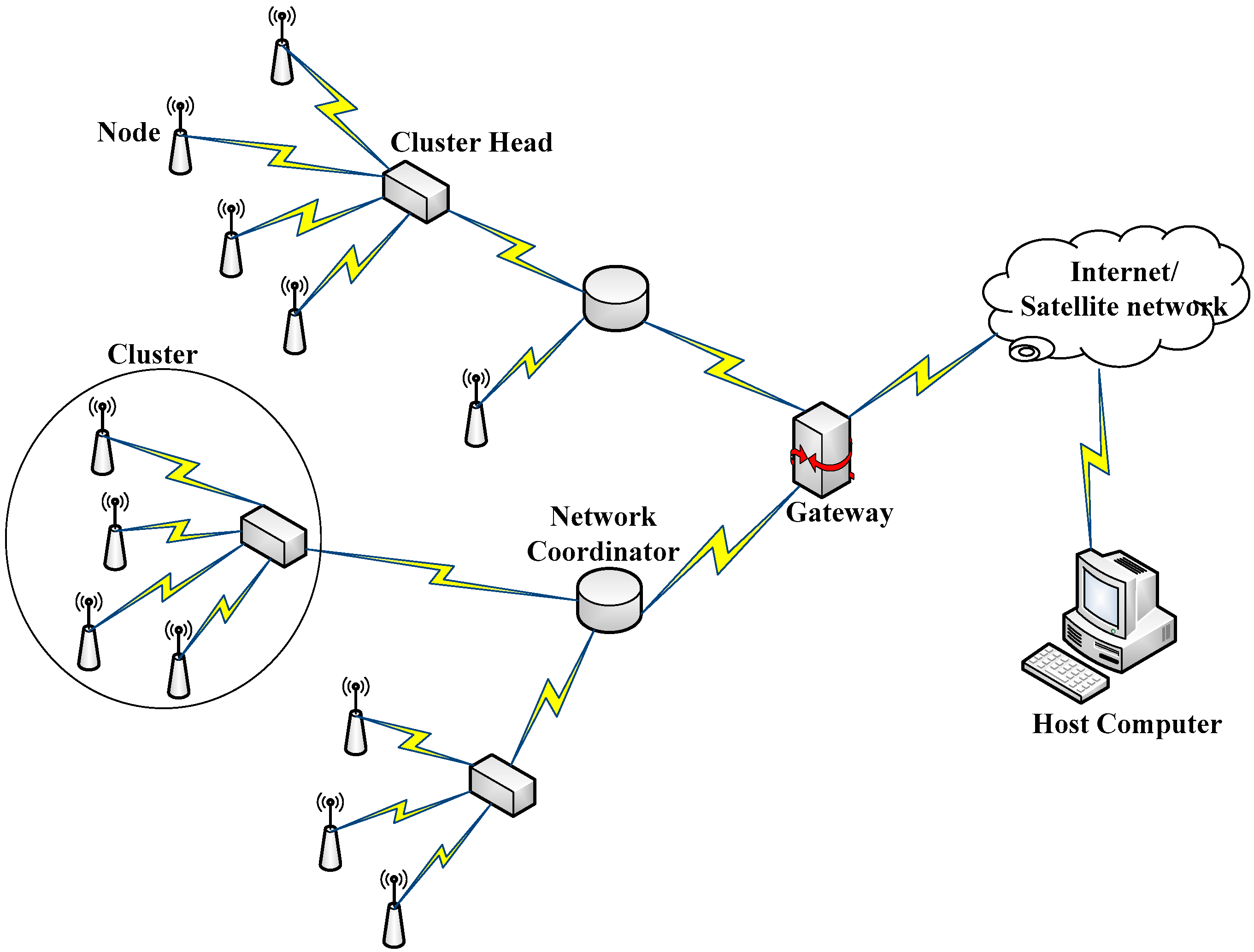
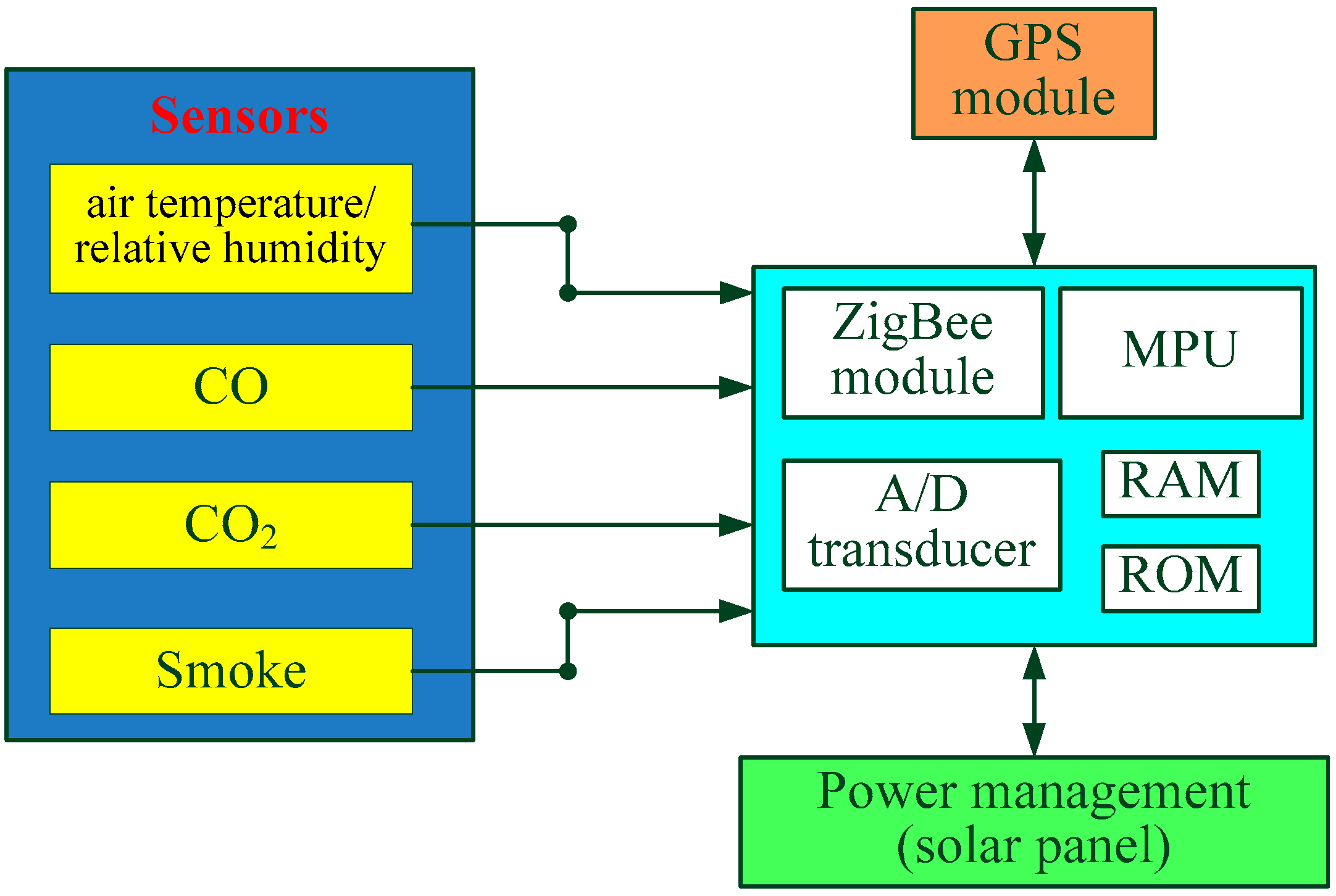
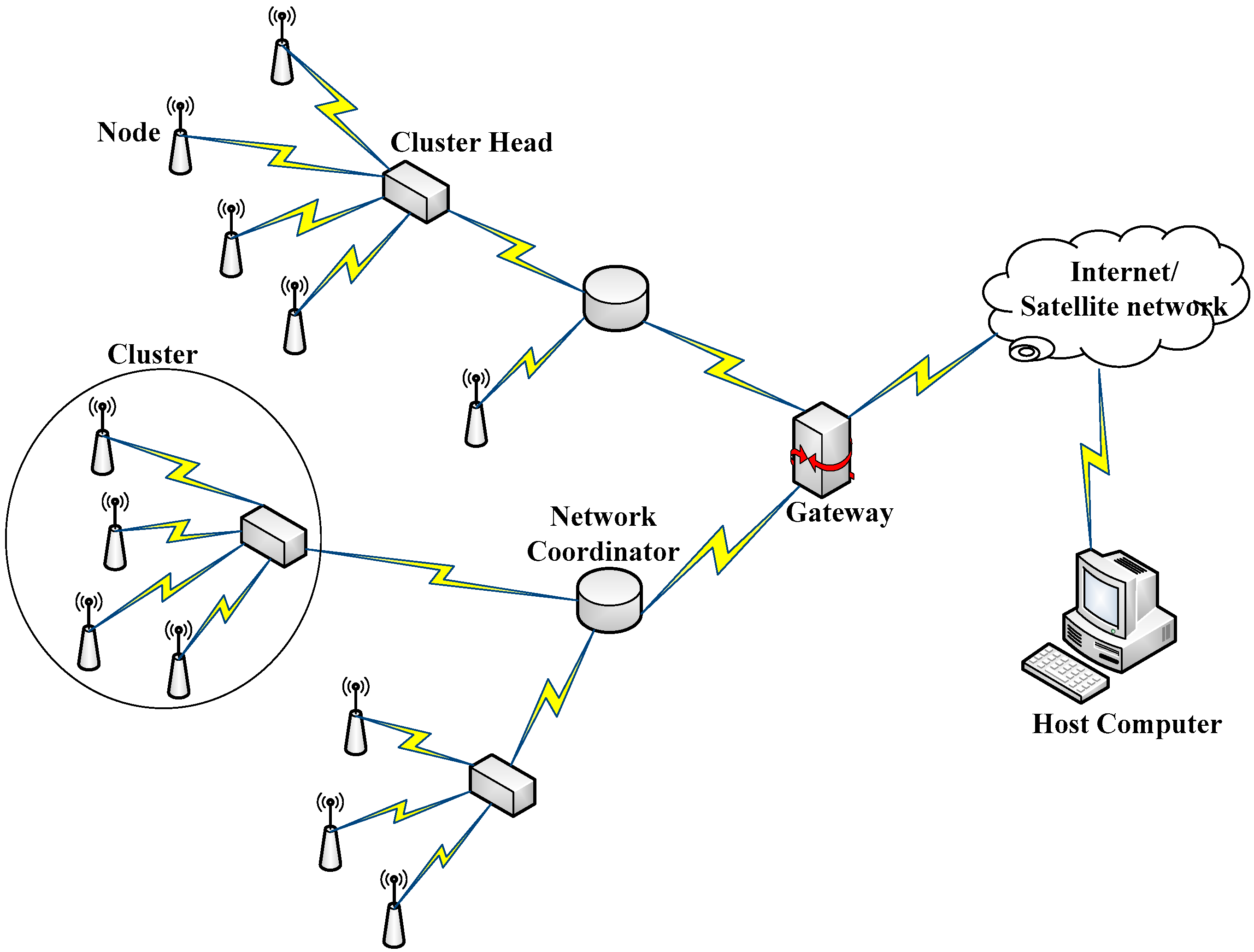
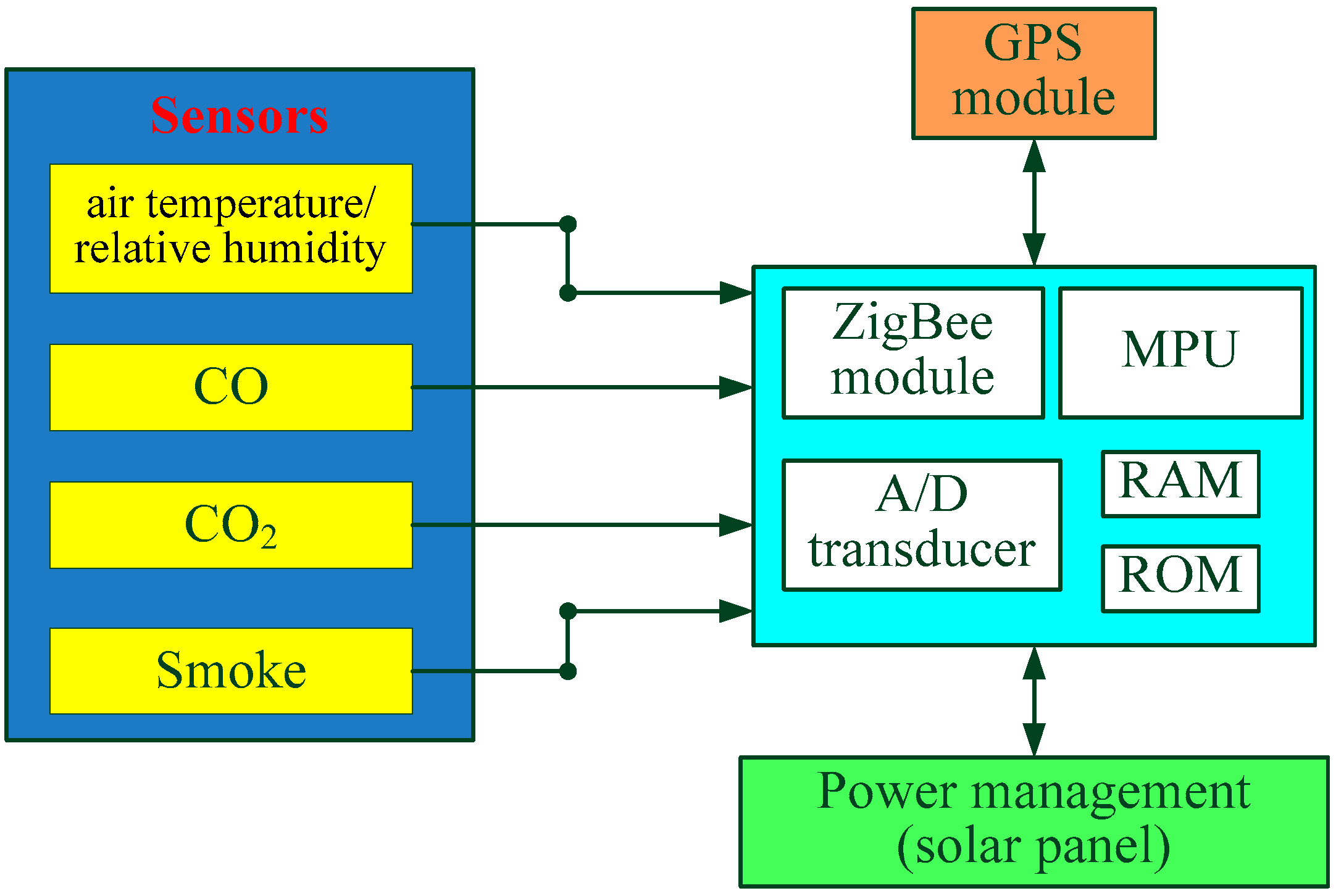
2.1. General Description of the Developed ZigBee-WSN-Based Multi-Sensor System and Its Potential Deployment Strategy in Forest Environment
2.2. Artificial Neural Network (ANN)
2.3. Experimental Procedure and Data Processing
3. Results and Discussion
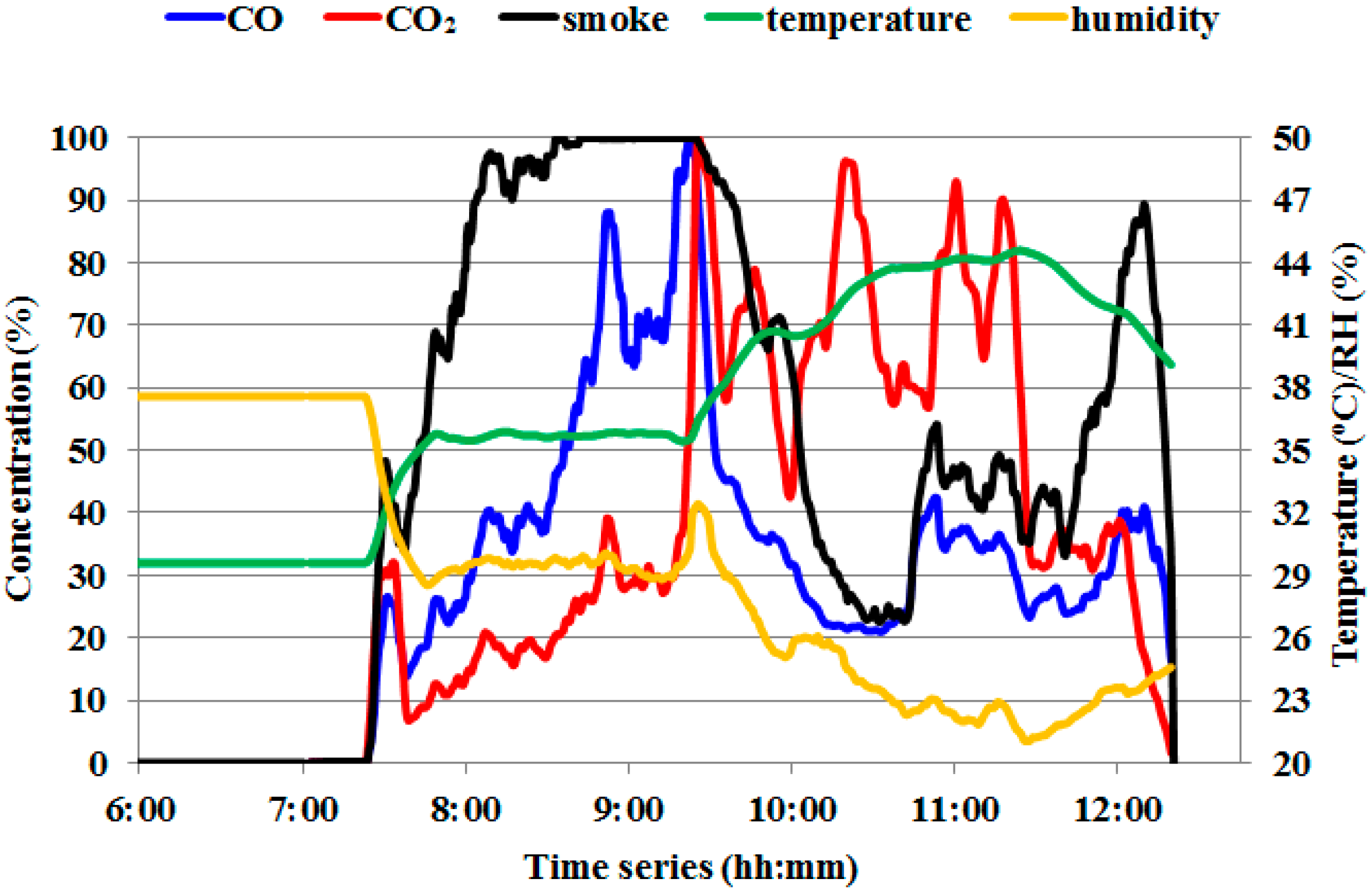
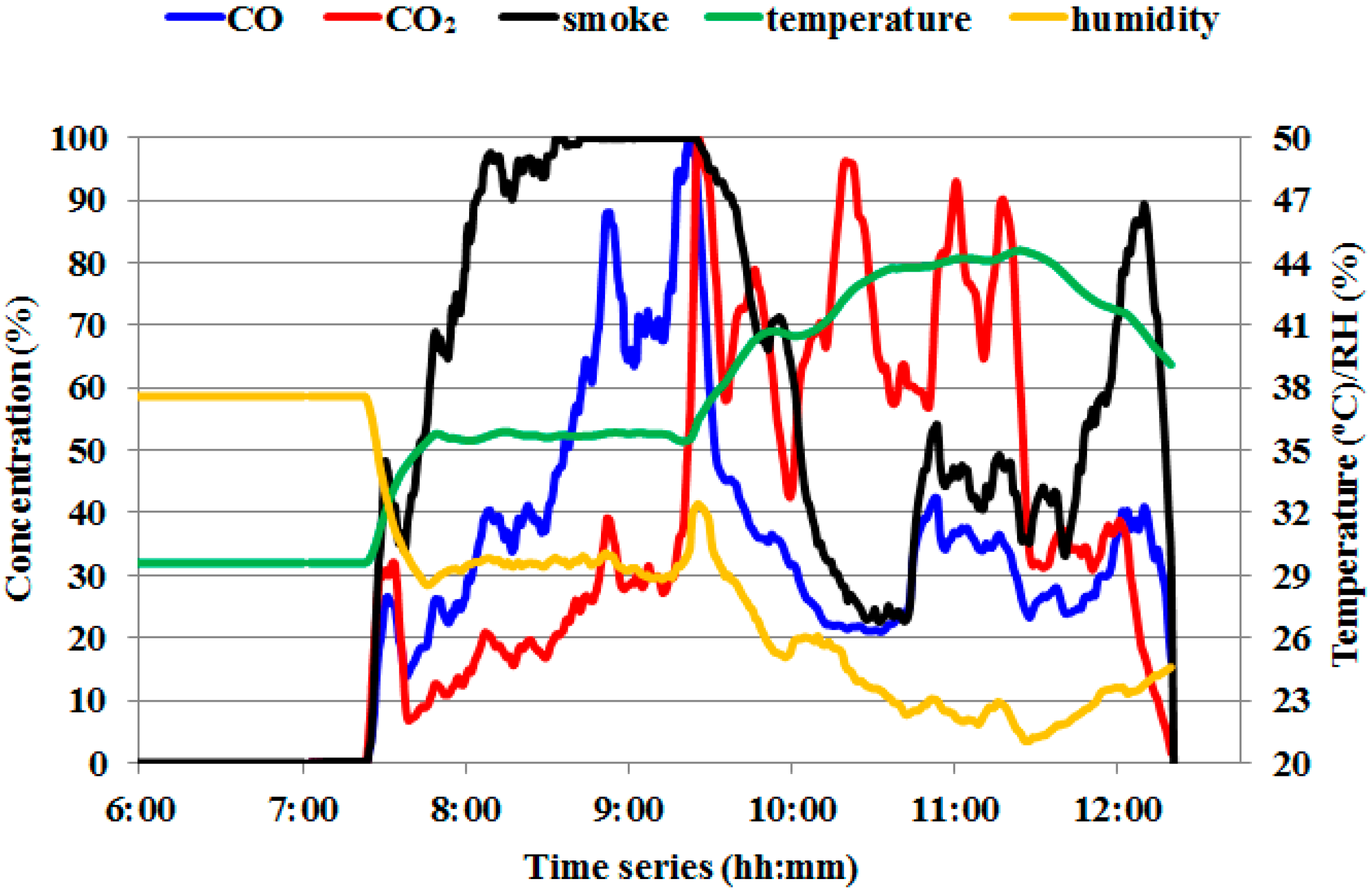
3.1. Responses of the Multi-Sensor System
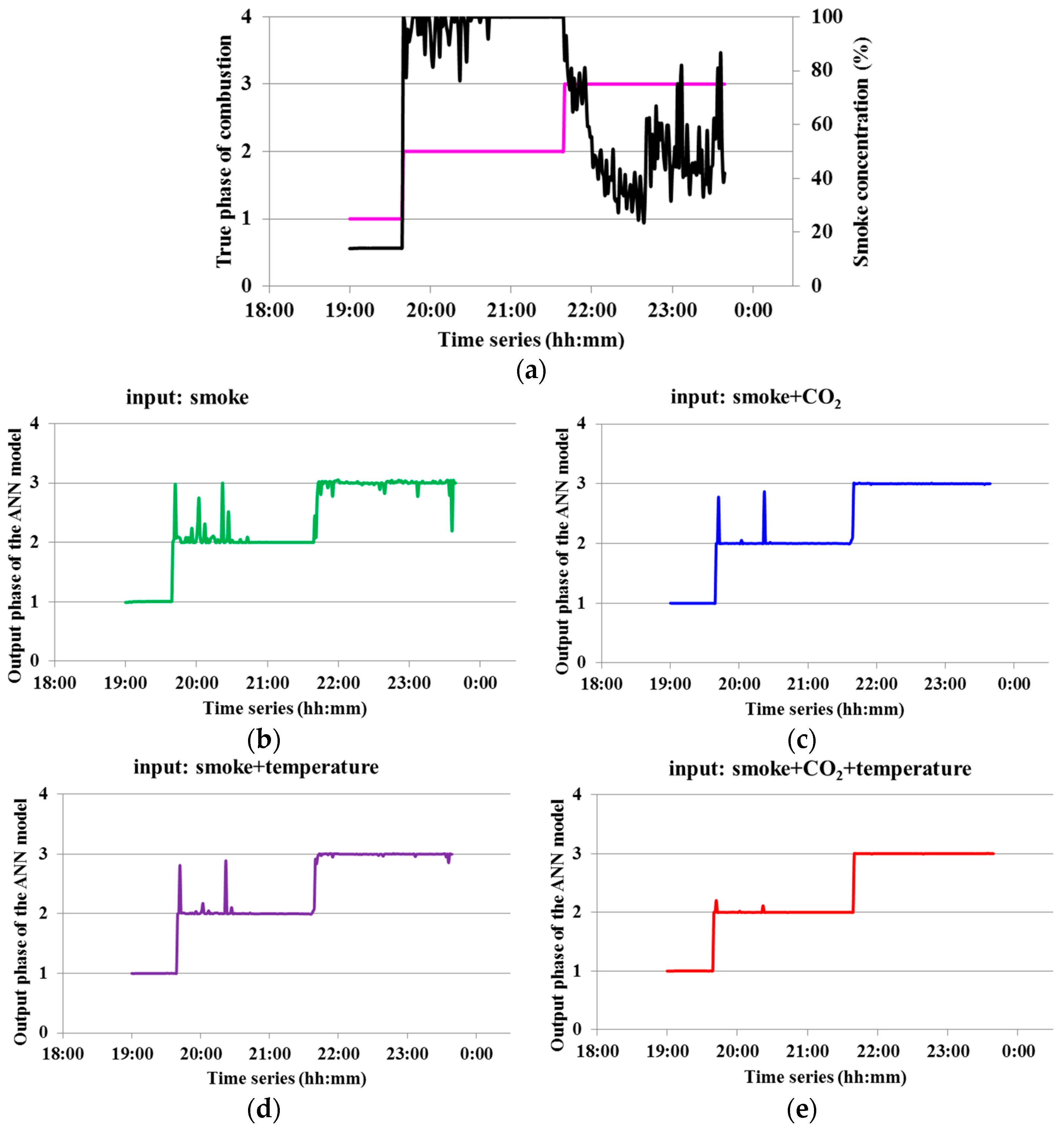
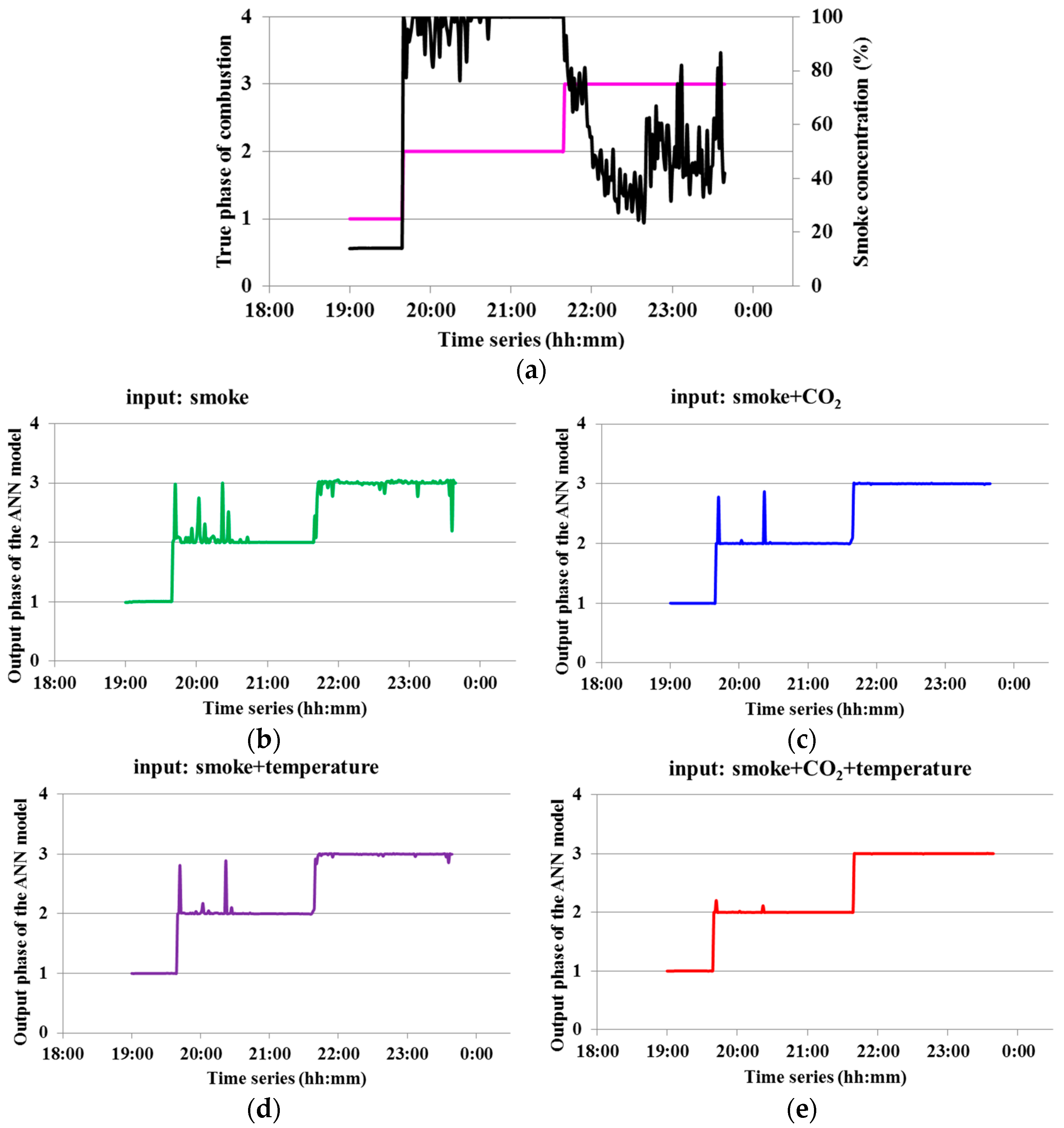
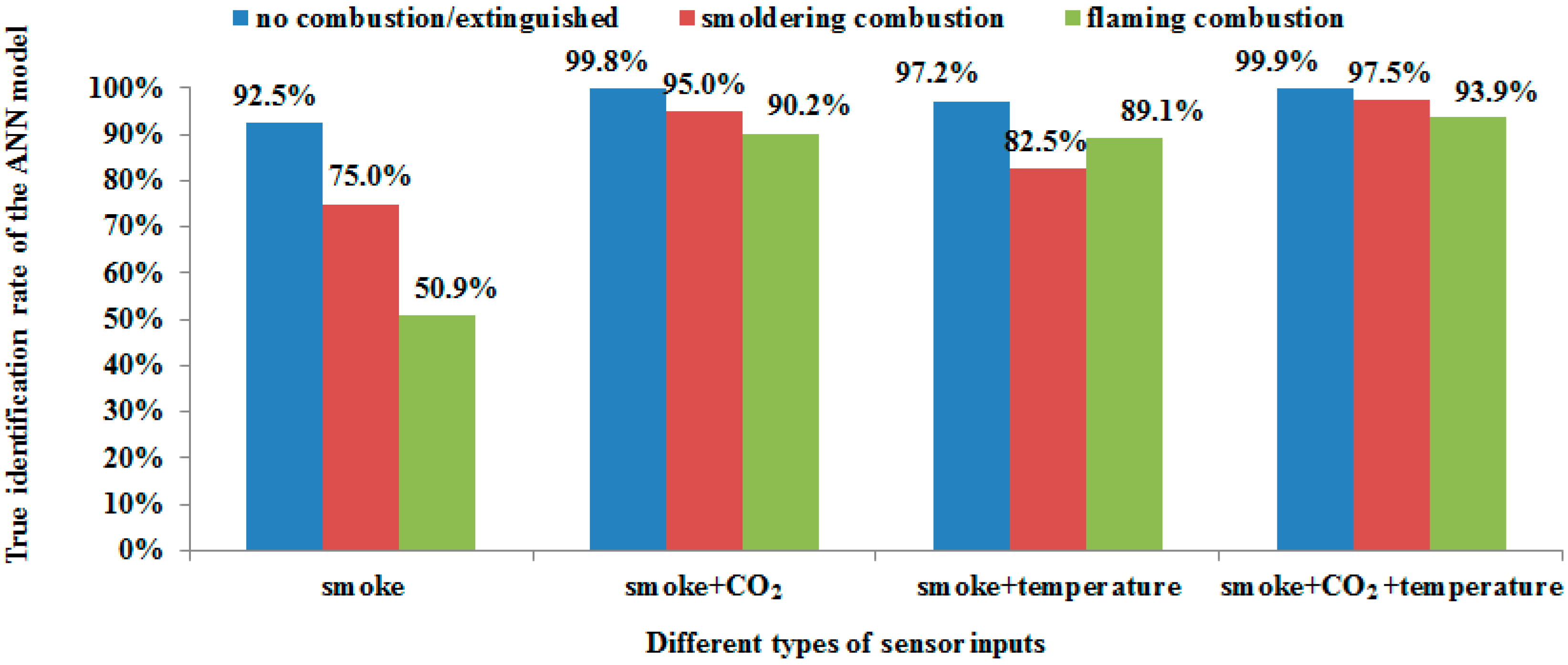
3.2. Performance of ANN Model Associated with Different Input Parameters
3.3. Potential False Identification Analysis
3.4. Possibility of Cost Reduction for the Multi-Sensor Node
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rowell, A.; Moore, P.F. Global Review of Forest Fires; WWF/IUCN: Gland, Switzerland, 2000. [Google Scholar]
- Vidal, A.; Devaux-Ros, C. Evaluating forest fire hazard with a landsat TM derived water stress index. Agric. For. Meteorol. 1995, 77, 207–224. [Google Scholar] [CrossRef]
- Vicente, J.; Guillemant, P. An image processing technique for automatically detecting forest fire. Int. J. Therm. Sci. 2002, 41, 1113–1120. [Google Scholar] [CrossRef]
- Toreyin, B.U.; Dedeoglu, Y.; Gudukbay, U.; Cetin, A.E. Computer vision based method for real-time fire and flame detection. Pattern Recognit. Lett. 2006, 27, 49–58. [Google Scholar] [CrossRef]
- Maki, M.; Ishiahra, M.; Tamura, M. Estimation of leaf water status to monitor the risk of forest fires by using remotely sensed data. Remote Sens. Environ. 2004, 90, 441–450. [Google Scholar] [CrossRef]
- Maeda, E.E.; Formaggio, A.R.; Shimabukuro, Y.E.; Arcoverde, G.F.B.; Hansen, M.C. Predicting forest fire in the Brazilian Amazon using MODIS imagery and artificial neural networks. Int. J. Appl. Earth Obs. Geoinform. 2009, 11, 265–272. [Google Scholar] [CrossRef]
- Kontoes, C.; Papoutsis, I.; Herekakis, T.; Sifakis, N.; Athens, P. Wildfire rapid detection and mapping and post-fire damage assessment in Greece. Earthzine Mag. 2013, 4, 203–207. [Google Scholar]
- Kontoes, C.; Keramitsoglou, I.; Papoutsis, I.; Sifakis, N.I.; Xofis, P. National scale operational mapping of burnt areas as a tool for the better understanding of contemporary wildfire patterns and regimes. Sensors 2013, 13, 11146–11166. [Google Scholar] [CrossRef] [PubMed]
- Ebert, E.E. Emerging Methods for High Impact Weather Prediction and Observation. In Coupled Modelling and Prediction: From Weather to Climate-Abstracts of the Ninth CAWCR Workshop 19–22 October 2015, Melbourne, Australia; Australian Government Bureau of Meteorology: Melbourne, Australia, 2015; pp. 92–96. [Google Scholar]
- Bessho, K.; Date, K.; Hayashi, M.; Ikeda, A.; Imai, T.; Inoue, H.; Kumagai, Y.; Miyakawa, T.; Murata, H.; Ohno, T.; et al. An introduction to Himawari-8/9—Japan’s new-generation geostationary meteorological satellites. J. Meteorol. Soc. Jpn. 2016, 94, 151–183. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Yu, L.; Wang, N.; Meng, X. Real-time forest fire detection with wireless sensor networks. In Proceedings of the International Conference on Wireless Communications, Networking and Mobile Computing (WiMob), Wuhan, China, 23–26 September 2005; pp. 1214–1217.
- Doolin, D.M.; Sitar, N. Wireless sensor nodes for wildfire monitoring. In Proceedings of the SPIE Symposium on Smart Structures and Materials, San Diego, CA, USA, 26 February–2 March 2006; pp. 477–484.
- Son, B. A design and implementation of forest-fires surveillance system based on wireless sensor networks for South Korea mountains. Int. J. Comput. Sci. Netw. Secur. 2006, 6, 124–130. [Google Scholar]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Hefeeda, M.; Bagheri, M. Forest fire modeling and early detection using wireless sensor networks. Ad Hoc Sens. Wirel. Netw. 2009, 7, 169–224. [Google Scholar]
- Lloret, J.; Garcia, M.; Bri, D.; Sendra, S. A wireless sensor network deployment for rural and forest fire detection and verification. Sensors 2009, 9, 8722–8747. [Google Scholar] [CrossRef] [PubMed]
- Tsiourlis, G.; Andreadakis, S.; Konstantinidis, P. SITHON: A Wireless Network of in Situ Optical Cameras Applied to the Early Detection-Notification-Monitoring of Forest Fires. Sensors 2009, 9, 4465–4482. [Google Scholar] [CrossRef] [PubMed]
- Aslan, Y.E.; Korpeoglu, I.; Ulusoy, Ö. A framework for use of wireless sensor networks in forest fire detection and monitoring. Comput. Environ. Urban Syst. 2012, 36, 614–625. [Google Scholar] [CrossRef]
- Hartung, C.; Han, R. FireWxNet: A multi-tiered portable wireless system for monitoring weather conditions in wild land fire environments. In Proceedings of the 4th International Conference on Mobile Systems, Applications and Services, Uppsala, Sweden, 19–22 June 2006; pp. 28–41.
- Li, Z.; Khananian, A.; Fraser, R.H.; Cihlar, J. Automatic Detection of Fire Smoke Using Artificial Neural Networks and Threshold Approaches Appliedto AVHRR Imagery. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1859–1870. [Google Scholar]
- Fernandes, A.M.; Utkin, A.B.; Lavrov, A.V.; Vilara, R.M. Development of neural network committee machines for automatic forest fire detection using lidar. Pattern Recognit. 2004, 37, 2039–2047. [Google Scholar] [CrossRef]
- Gubbi, J.; Marusic, S.; Palaniswami, M. Smoke detection in video using wavelets and support vector machines. Fire Saf. J. 2009, 44, 1110–1115. [Google Scholar] [CrossRef]
- Ko, B.C.; Cheong, K.H.; Nam, J.Y. Fire detection based on vision sensor and support vector machines. Fire Saf. J. 2009, 44, 322–329. [Google Scholar] [CrossRef]
- Ward, D.E.; Radke, L.F. Emissions measurements from vegetation fires: A Comparative evaluation of methods and results. In Fire in the Environment: The Ecological, Atmosphericand Climatic Importance of Vegetation Fires; Crutzen, P.J., Goldammer, J.G., Eds.; John Wiley: New York, NY, USA, 1993; pp. 53–76. [Google Scholar]
- Yokelson, R.J.; Griffith, D.W.T.; Ward, D.E. Open path Fourier transform infrared studies of large-scale laboratory biomass fires. J. Geophys. Res. 1996, 101, 21067–21080. [Google Scholar] [CrossRef]
- Akagi, S.K.; Yokelson, R.J.; Wiedinmyer, C.; Alvarado, M.J.; Reid, J.S.; Karl, T.; Crounse, J.D.; Wennberg, P.O. Emission factors for open and domestic biomass burning for use in atmospheric models. Atmos. Chem. Phys. 2011, 11, 4039–4072. [Google Scholar] [CrossRef]
- ZigBee Alliance. Available online: http://www.zigbee.org/portfolio/nietzsche-enterprise-co-ltd/?lang=en (accessed on 18 November 2015).
- Oh, N.J.; Lee, S.G. A CMOS 868/915 MHz direct conversion ZigBee single-chip radio. IEEE Commun. Mag. 2005, 43, 100–109. [Google Scholar]
- Jiang, T.; Hu, P.; Zhao, Y. Design of Irrigation Control System Based on ZigBee Wireless Sensor Network. Water Sav. Irrig. 2011, 2, 58–61, (In Chinese with English abstract). [Google Scholar]
- Instruments, Texas. A True System-on-Chip solution for 2.4 GHz IEEE 802.15.4/ZigBee®. In CC2430 Data Sheet (Rev. 2.1) (SWRS036F); Texas Instruments: Dallas, TX, USA, 2009. [Google Scholar]
- Blackard, J.A.; Dean, D.J. Comparative accuracies of artificial neural networks and discriminant analysis in predicting forest cover types from cartographic variables. Comput. Electron. Agric. 1999, 24, 131–151. [Google Scholar] [CrossRef]
- Yu, G.; Xiao, J.; Yuan, X. Development of forest woody biomass briquette in China. Biomass Chem. Eng. 2006, 12, 45–50, (In Chinese with English abstract). [Google Scholar]
- Dargie, W.; Zimmerling, M. Wireless Sensor Networks in the Context of Developing Countries. In Proceedings of the 3rd IFIP World Information Technology Forum (WITFOR), Addis Ababa, Ethiopia, 22–24 August 2007.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Parameter | Value |
|---|---|
| Sample | 1160 |
| Number of samples for training: 316 | |
| Number of samples for testing: 844 | |
| Input | 1 or 2 or 3 |
| Hidden neurons | 5 |
| Output neurons | 1 |
| Performance | MSE |
| Goal | 0.00001 |
| Learning rate | 0.01 |
| Momentum constant | 0.9 |
| Parameter | CO | CO2 | Smoke | Temperature | Humidity |
|---|---|---|---|---|---|
| CO | 1 | ||||
| CO2 | 0.2808 | 1 | |||
| smoke | 0.8008 | 0.0573 | 1 | ||
| temperature | −0.0872 | 0.6200 | −0.2084 | 1 | |
| humidity | 0.1783 | −0.4008 | 0.2539 | −0.9392 | 1 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, X.; Cheng, H.; Zhao, Y.; Yu, W.; Huang, H.; Zheng, X. Real-Time Identification of Smoldering and Flaming Combustion Phases in Forest Using a Wireless Sensor Network-Based Multi-Sensor System and Artificial Neural Network. Sensors 2016, 16, 1228. https://doi.org/10.3390/s16081228
Yan X, Cheng H, Zhao Y, Yu W, Huang H, Zheng X. Real-Time Identification of Smoldering and Flaming Combustion Phases in Forest Using a Wireless Sensor Network-Based Multi-Sensor System and Artificial Neural Network. Sensors. 2016; 16(8):1228. https://doi.org/10.3390/s16081228
Chicago/Turabian StyleYan, Xiaofei, Hong Cheng, Yandong Zhao, Wenhua Yu, Huan Huang, and Xiaoliang Zheng. 2016. "Real-Time Identification of Smoldering and Flaming Combustion Phases in Forest Using a Wireless Sensor Network-Based Multi-Sensor System and Artificial Neural Network" Sensors 16, no. 8: 1228. https://doi.org/10.3390/s16081228
APA StyleYan, X., Cheng, H., Zhao, Y., Yu, W., Huang, H., & Zheng, X. (2016). Real-Time Identification of Smoldering and Flaming Combustion Phases in Forest Using a Wireless Sensor Network-Based Multi-Sensor System and Artificial Neural Network. Sensors, 16(8), 1228. https://doi.org/10.3390/s16081228