
Fault Diagnosis Strategies for SOFC-Based Power Generation Plants

 ,
,
Abstract
:1. Introduction
- (1)
- The definition of an FDI solution that is able to properly function in several operating conditions of an SOFC plant and for many sizes of each possible fault. To this end, model-based FDI schemes adopting the FSM, purely data-driven FDI schemes and hybrid FDI schemes, in which a supervised classifier is used to analyse residuals, are examined and compared.
- (2)
- The assessment of the inclusion of physical quantities measured inside the SOFC stack among the variables used by the FDI system. Although the adoption of physical variables that are easy to measure in a real SOFC plant can yield satisfactory FDI performance, the impact of a few additional variables measured inside the SOFC stack is evaluated along with the current difficulties in measuring such variables.
- (3)
- The introduction of random forests (RFs) [23], a powerful supervised nonparametric classification approach, as the pattern recognition technique to be used within a hybrid FDI approach in SOFC-based power generation plants. Although RFs have already been used in data-driven FDI for general machines [24,25], until now, they have not been considered in the FC field or in combination with a model-based FDI system. Here, we consider RFs because they offer some advantages that are particularly relevant in devising, developing, and testing FDI systems for FC-based plants.
2. FDI Strategies
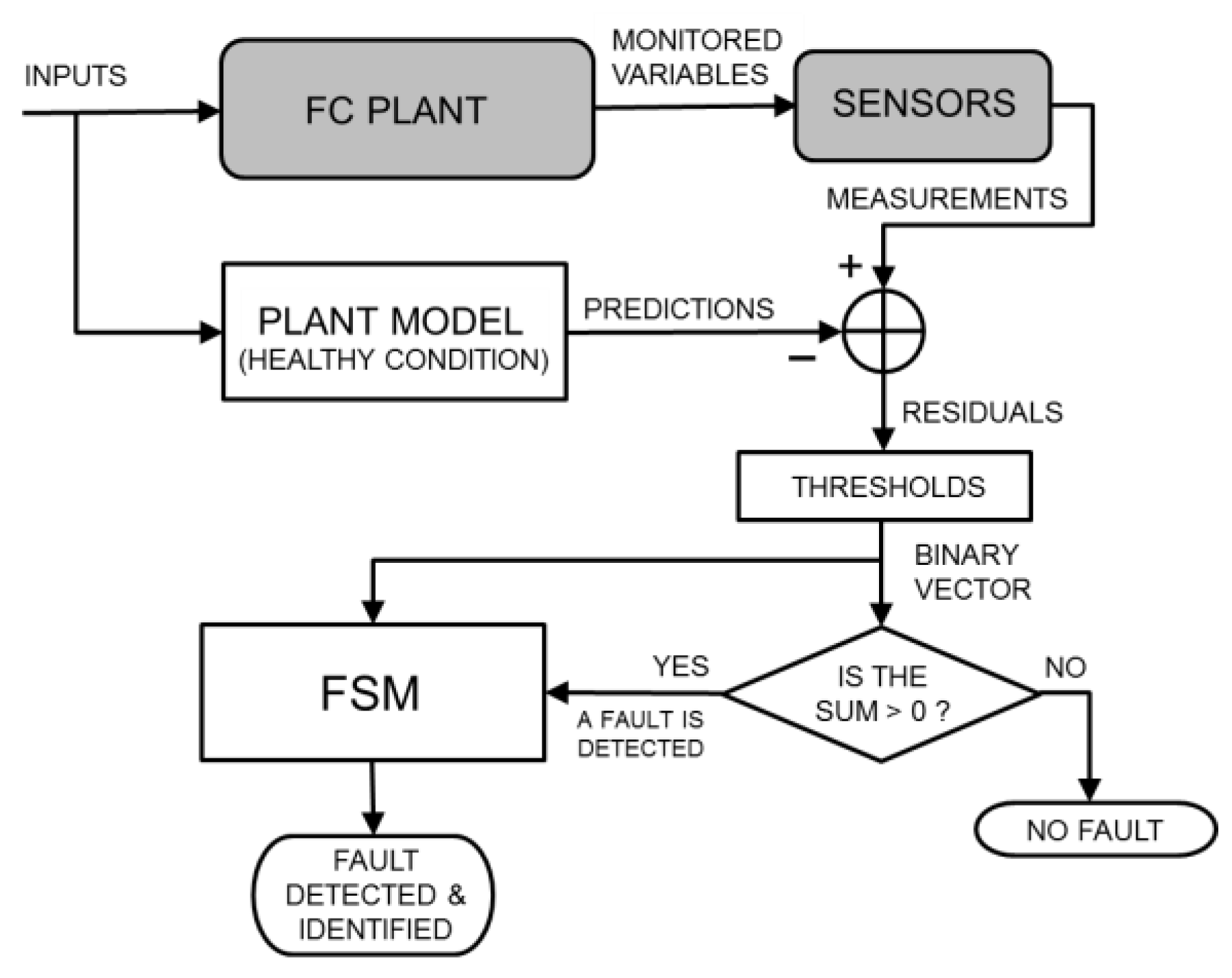
2.1. Model-Based FDI
2.2. Data-Driven FDI
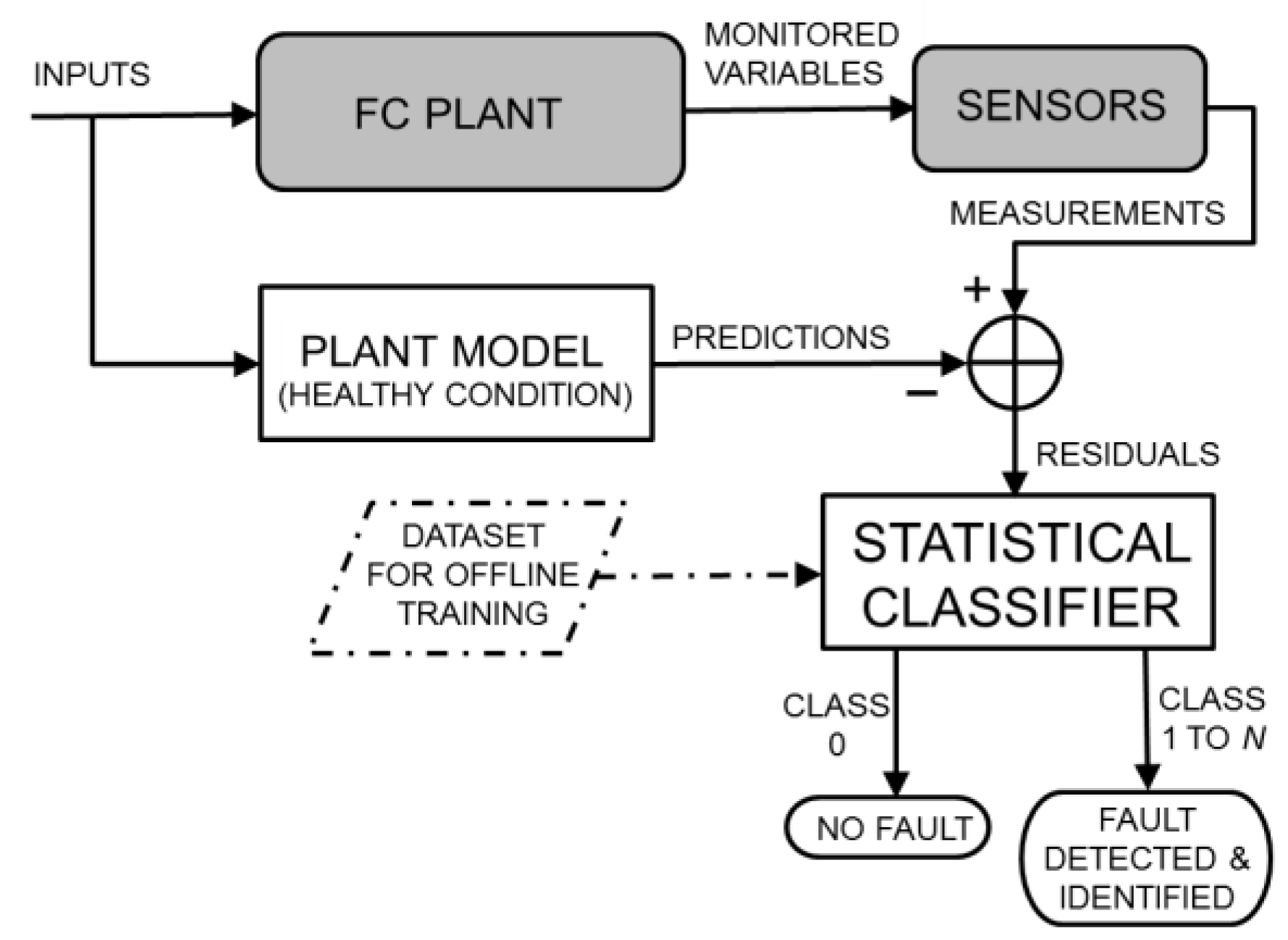
2.3. Hybrid FDI
2.4. Plant Models Simulating Healthy and Faulty Conditions
3. Measurements and Faults in the SOFC Plant and Related Model
3.1. SOFC Plant Structure and Operating Conditions
3.2. Monitored Variables and the Measurement Difficulties
3.3. Fault Classes
3.4. Quantitative Plant Model
4. Random Forests for Classification
4.1. RFs for FDI in SOFC Plants
4.2. RF Fundamentals
5. Results and Discussion
5.1. Simulated Measurements and Residuals
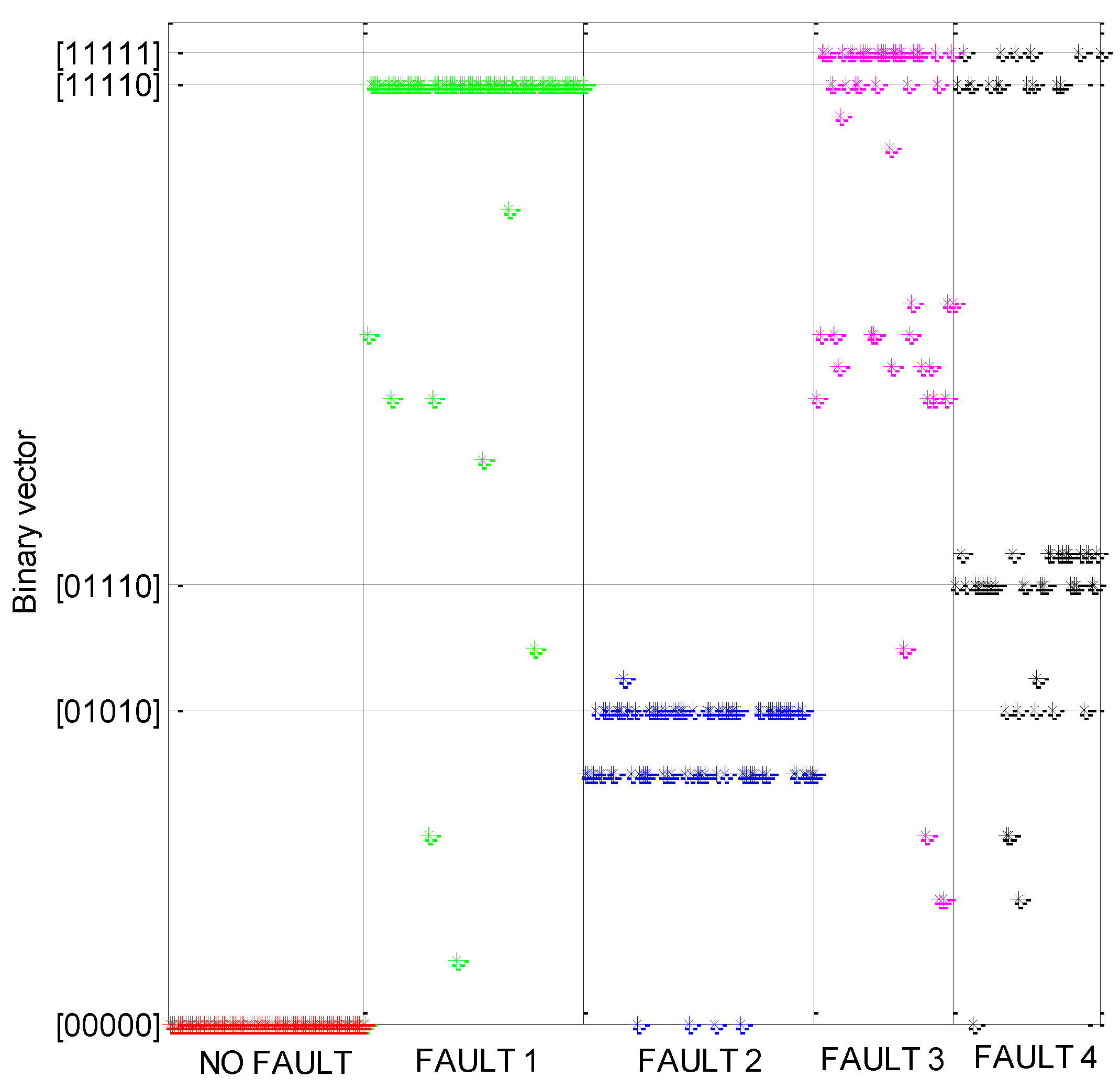
5.2. Model-Based FDI with FSM
5.3. Data-Driven FDI with RF Classifier
5.4. Hybrid FDI Strategy with Plant Model and RF Classifier
5.5. Hybrid FDI Strategy Adding Variables Measured Inside the FC Stack
6. Conclusions
- (1)
- Model-based FDI schemes that adopt the FSM and purely data-driven FDI schemes do not provide satisfactory performance when numerous operating conditions for the SOFC plant and many sizes for each fault are considered. Rather, a hybrid FDI strategy in which a supervised classifier is used to analyse residuals generated through a quantitative plant model can reach a high rate of fault detection and identification and a low rate of false alarms.
- (2)
- The performance of the hybrid FDI strategy could be further improved by including, among the monitored variables, two physical quantities measured inside the SOFC stack, namely, the maximum temperature gradient and cathodic activation losses. Although the practical measurement of these quantities during the FC functioning is currently extremely difficult, recent research results provide the opportunity to achieve future solutions.
- (3)
- RFs represent a suitable pattern recognition tool for achieving a supervised classifier that can be successfully applied for the FDI in SOFC-based power generation plants. In this context, the following advantages of RFs are particularly important: (i) RF is a fully non-parametric classifier, a property that makes it possible to jointly exploit the multisensor information associated with measurements of highly heterogeneous physical and chemical variables; (ii) in addition to the aforementioned high classification accuracy, RF has demonstrated remarkable computational efficiency with execution times of a few seconds to complete the training and testing tasks in all experiments; and (iii) the method includes only two parameters, which do not typically affect accuracy significantly and for which tuning is quite straightforward. All of these properties suggest that RF can be an effective choice as a supervised classification technique in the application considered in this paper. Based on our experience and several reports in the literature [24,25,47,48], we also note that alternate non-parametric classification techniques (e.g., SVM or artificial neural networks), while they can obviously obtain different accuracies with specific individual data sets on a case-by-case basis, are not expected to alter the validity of the general comments drawn in the previous points.
Author Contributions
Conflicts of Interest
References
- Srinivasan, S. Fuel Cells: From Fundamentals to Applications; Springer Verlag: New York, NY, USA, 2006. [Google Scholar]
- Behling, N. Fuel Cells: Current Technology Challenges and Future Research Need; Elsevier: Oxford, UK, 2012. [Google Scholar]
- Petrone, R.; Zheng, Z.; Hissel, D.; Péra, M.C.; Pianese, C.; Sorrentino, M.; Becherif, M.; Yousfi-Steiner, N. A review on model-based diagnosis methodologies for PEMFCs. Int. J. Hydrogen Energy 2013, 38, 7077–7091. [Google Scholar] [CrossRef]
- Sorce, A.; Greco, A.; Magistri, L.; Costamagna, P. FDI oriented modeling of an experimental SOFC system, model validation and simulation of faulty states. Appl. Energy 2014, 136, 894–908. [Google Scholar] [CrossRef]
- Sorrentino, M.; Pianese, C. Grey-Box Modeling of SOFC Unit for Design, Control and Diagnostics Applications. In Proceedings of the European Fuel Cell Forum 2009, Lucerne, Switzerland, 29 June 2009.
- Arsie, I.; Di Filippi, A.; Marra, D.; Pianese, C.; Sorrentino, M. Fault Tree Analysis Aimed to Design and Implement on-Field Fault Tree Fault Detection and Isolation Schemes for SOFC Systems. In Proceedings of the ASME 2010 8th International Conference on Fuel Cell Science, Engineering and Technology, New York, NY, USA, 14–17 November 2010; p. 11.
- Yousfi Steiner, N.; Hissel, D.; Moçotéguy, P.; Candusso, D.; Marra, D.; Pianese, C.; Sorrentino, M. Application of fault tree analysis to fuel cell diagnosis. Fuel Cells 2012, 12, 302–309. [Google Scholar] [CrossRef]
- Pellaco, L.; Costamagna, P.; De Giorgi, A.; Greco, A.; Magistri, L.; Moser, G.; Trucco, A. Fault diagnosis in fuel cell systems using quantitative models and support vector machines. Electron. Lett. 2014, 50, 824–826. [Google Scholar] [CrossRef]
- Polverino, P.; Pianese, C.; Sorrentino, M.; Marra, D. Model-based development of a fault signature matrix to improve solid oxide fuel cell systems on-site diagnosis. J. Power Sources 2015, 280, 320–338. [Google Scholar] [CrossRef]
- Isermann, R. Supervision, fault-detection and fault-diagnosis methods—An introduction. Control Eng. Pract. 1997, 5, 639–652. [Google Scholar] [CrossRef]
- Venkatasubramanian, V.; Rengaswamy, R.; Yin, K.; Kavuri, S.N. A review of process fault detection and diagnosis: Part I: Quantitative model-based methods. Comput. Chem. Eng. 2003, 27, 293–311. [Google Scholar] [CrossRef]
- Isermann, R. Model-based fault-detection and diagnosis—Status and applications. Annu. Rev. Control 2005, 29, 71–85. [Google Scholar] [CrossRef]
- Escobet, T.; Feroldi, D.; de Lira, S.; Puig, V.; Quevedo, J.; Riera, J.; Serra, M. Model-based fault diagnosis in PEM fuel cell systems. J. Power Sources 2009, 192, 216–223. [Google Scholar] [CrossRef]
- Costamagna, P.; De Giorgi, A.; Magistri, L.; Moser, G.; Pellaco, L.; Trucco, A. A classification approach for model-based fault diagnosis in power generation systems based on solid oxide fuel cells. IEEE Trans. Energy Convers. 2015, 30, 678–687. [Google Scholar] [CrossRef]
- MacGregor, J.; Cinar, A. Monitoring, fault diagnosis, fault-tolerant control and optimization: Data driven methods. Comput. Chem. Eng. 2012, 47, 111–120. [Google Scholar] [CrossRef]
- Yin, S.; Ding, S.X.; Xie, X.; Luo, H. A review on basic data-driven approaches for industrial process monitoring. IEEE Trans. Ind. Electron. 2014, 61, 6418–6428. [Google Scholar] [CrossRef]
- Wang, L.; Wu, L.; Guan, Y.; Wang, G. Online Sensor Fault detection based on an improved strong tracking filter. Sensors 2015, 15, 4578–4591. [Google Scholar] [CrossRef] [PubMed]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of Fault diagnosis and fault-tolerant techniques-part II: Fault diagnosis with knowledge-based and hybrid/active approaches. IEEE Trans. Ind. Electron. 2015, 62, 3768–3774. [Google Scholar] [CrossRef]
- Sobhani-Tehrani, E.; Khorasani, K. Fault Diagnosis of Nonlinear Systems Using a Hybrid. Approach; Springer Verlag: New York, NY, USA, 2009. [Google Scholar]
- Luo, J.; Namburu, M.; Pattipati, K.R.; Qiao, L.; Chigusa, S. Integrated model-based and data-driven diagnosis of automotive antilock braking system. IEEE Trans. Syst. Man Cybern. A 2010, 40, 321–336. [Google Scholar] [CrossRef]
- Vapnik, V.N. The Nature of Statistical Learning Theory; Springer-Verlag: Berlin, Germany, 2000. [Google Scholar]
- Moser, G.; Costamagna, P.; De Giorgi, A.; Greco, A.; Magistri, L.; Pellaco, L.; Trucco, A. Joint feature and model selection for SVM fault diagnosis in solid oxide fuel Cell Systems. Math. Probl. Eng. 2015, 2015, 1–12. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Yang, B.; Di, X.; Han, T. Random forests classifier for machine fault diagnosis. J. Mech. Sci. Technol. 2008, 22, 1716–1725. [Google Scholar] [CrossRef]
- Son, J.; Niu, G.; Yang, B.; Hwang, D.; Kang, D. Development of smart sensors system for machine fault diagnosis. Expert Syst. Appl. 2009, 36, 11981–11991. [Google Scholar] [CrossRef]
- Wang, K.; Hissel, D.; Péra, M.C.; Steiner, N.; Marra, D.; Sorrentino, M.; Pianese, C.; Monteverde, M.; Cardone, P.; Saarinen, J. A review on solid oxide fuel cell models. Int. J. Hydrog. Energy 2011, 36, 7212–7228. [Google Scholar] [CrossRef]
- Marra, D.; Sorrentino, M.; Pianese, C.; Iwanschitz, B. A neural network estimator of solid oxide fuel cell performance for on-field diagnostics and prognostics applications. J. Power Sources 2013, 241, 320–329. [Google Scholar] [CrossRef]
- Zheng, Z.; Petrone, R.; Péra, M.C.; Hissel, D.; Becherif, M.; Pianese, C.; Steiner, N.Y.; Sorrentino, M. A review on non-model based diagnosis methodologies for PEM fuel cell stacks and systems. Int. J. Hydrog. Energy 2013, 38, 8914–8926. [Google Scholar] [CrossRef]
- Ruiz-Gonzalez, R.; Gomez-Gil, J.; Gomez-Gil, F.J.; Martínez-Martínez, V. An SVM-Based classifier for estimating the state of various rotating components in agro-Industrial machinery with a vibration signal acquired from a single point on the machine chassis. Sensors 2014, 14, 20713–20735. [Google Scholar] [CrossRef] [PubMed]
- Ng, S.S.Y.; Tse, P.W.; Tsui, K.L. A one-versus-All class Binarization strategy bearing diagnostics of Concurrent defects. Sensors 2014, 14, 1295–1321. [Google Scholar] [CrossRef] [PubMed]
- Santos, P.; Villa, L.F.; Reñones, A.; Bustillo, A.; Maudes, J. An SVM-Based solution for Fault detection in wind turbines. Sensors 2015, 15, 5627–5648. [Google Scholar] [CrossRef] [PubMed]
- Chiang, L.H.; Russell, E.L.; Braatz, E.L. Fault Detection and Diagnosis in Industrial Systems; Springer-Verlag: London, UK, 2001. [Google Scholar]
- Najafi, B.; Mamaghani, A.H.; Rinaldi, F.; Casalegno, A. Long-term performance analysis of an HT-PEM fuel cell based micro-CHP system: Operational strategies. Appl. Energy 2015, 147, 582–592. [Google Scholar] [CrossRef]
- Greco, A.; Sorce, A.; Littwin, R.; Costamagna, P.; Magistri, L. Reformer faults in SOFC systems: Experimental and modeling analysis, and simulated fault maps. Int. J. Hydrog. Energy 2014, 39, 21700–21713. [Google Scholar] [CrossRef]
- Morel, B.; Roberge, R.; Savoie, S.; Napporn, T.W.; Meunier, M. An experimental evaluation of the temperature gradient in solid oxide fuel cells. Electrochem. Solid-State Lett. 2007, 10, 31–33. [Google Scholar] [CrossRef]
- Guan, W.B.; Zhai, H.J.; Jin, L.; Xu, C.; Wang, W.G. Temperature measurement and distribution inside planar SOFC stacks. Fuel Cells 2012, 12, 24–31. [Google Scholar] [CrossRef]
- Huber, T.M.; Opitz, A.K.; Kubicek, M.; Hutter, H.; Fleig, J. Temperature gradients in microelectrode measurements: Relevance and solutions for studies of SOFC electrode materials. Solid State Ion. 2014, 268, 82–93. [Google Scholar] [CrossRef]
- Kuo, L.-S.; Huang, H.-H.; Yang, C.-H.; Chen, P.-H. Real-Time remote monitoring of temperature and humidity within a Proton exchange membrane fuel cell using flexible sensors. Sensors 2011, 11, 8674–8684. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.-Y.; Fan, W.-Y.; Chang, C.-P. A novel method for in-situ monitoring of local voltage, temperature and humidity distributions in fuel cells using flexible multi-functional micro sensors. Sensors 2011, 11, 1418–1432. [Google Scholar] [CrossRef] [PubMed]
- Aglzim, E.; Rouane, A.; El-Moznine, R. An electronic measurement instrumentation of the impedance of a loaded fuel cell or battery. Sensors 2007, 7, 2363–2377. [Google Scholar] [CrossRef]
- Lang, M.; Auer, C.; Eismann, A.; Szabo, P.; Wagner, N. Investigation of solid oxide fuel cell short stacks for mobile applications by electrochemical impedance spectroscopy. Electrochim. Acta 2008, 53, 7509–7513. [Google Scholar] [CrossRef]
- Comminges, C.; Fu, Q.X.; Zahid, M.; Yousfi Steiner, N.; Bucheli, O. Monitoring the degradation of a solid oxide fuel cell stack during 10,000 h via electrochemical impedance spectroscopy. Electrochim. Acta 2012, 59, 376–375. [Google Scholar] [CrossRef]
- Millichamp, J.; Mason, T.J.; Brandon, N.P.; Brown, R.J.C.; Maher, R.C.; Manos, G.; Neville, T.P.; Brett, D.J.L. A study of carbon deposition on solid oxide fuel cell anodes using electrochemical impedance spectroscopy in combination with a high temperature crystal Microbalance. J. Power Sources 2013, 235, 14–19. [Google Scholar] [CrossRef]
- Technical Documentation Integrated Stack Module, Staxera GmbH, Dresden, Germany. Available online: http://www.fuelcellmarkets.com/content/images/articles/00864_AS_Dokumentation_ISM.pdf (accessed on 2 February 2016).
- Generic Diagnosis Instrument for SOFC Systems (GENIUS), European Union, Collaborative Project No. FCH JU 245128. Available online: http://www.fch-ju.eu/project/generic-diagnosis-instrument-sofc-systems (accessed on 2 February 2016).
- Kuncheva, L.I.; Alpaydin, E. Combining Pattern Classifiers: Methods and Algorithms; Wiley-Interscience: Hoboken, NJ, USA, 2004. [Google Scholar]
- Statnikov, A.; Wang, L.; Aliferis, C.F. A comprehensive comparison of random forests and support vector machines for microarray-based cancer classification. BMC Bioinform. 2008, 9, 319. [Google Scholar] [CrossRef] [PubMed]
- Nef, T.; Urwyler, P.; Büchler, M.; Tarnanas, I.; Stucki, R.; Cazzoli, D.; Müri, R.; Mosimann, U. Evaluation of three state-of-the-art classifiers for recognition of activities of daily living from smart home ambient data. Sensors 2015, 15, 11725–11740. [Google Scholar] [CrossRef] [PubMed]
- Breiman, L.; Friedman, J.; Olshen, R.; Stone, C. Classification and Regression Trees; Wadsworth: Belmont, CA, USA, 1984. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Physical Quantity |
|---|---|
| 1 | Generated electric power |
| 2 | Air flow rate entering the plant |
| 3 | Reformate fuel flow rate entering the SOFC stack |
| 4 | Air pressure loss between the inlet and outlet of the SOFC stack |
| 5 | Temperature at the burner outlet |
| Status | R1 | R2 | R3 | R4 | R5 |
|---|---|---|---|---|---|
| No fault | 0 | 0 | 0 | 0 | 0 |
| Fault No. 1 | 1 | 1 | 1 | 1 | 0 |
| Fault No. 2 | 0 | 1 | 0 | 1 | 0 |
| Fault No. 3 | 1 | 1 | 1 | 1 | 1 |
| Fault No. 4 | 0 | 1 | 1 | 1 | 0 |
| Status | Variables 1 ÷ 5 | Var. 1 ÷ 5, MTG | Var. 1 ÷ 5, MTG, CAL | |||
|---|---|---|---|---|---|---|
| PA | PA | PA | ||||
| No fault | 93% | OA = 86% | 93% | OA = 92% | 96% | OA = 96% |
| Fault No. 1 | 87% | 93% | 95% | |||
| Fault No. 2 | 94% | 94% | 96% | |||
| Fault No. 3 | 82% | 85% | 99% | |||
| Fault No. 4 | 75% | 95% | 96% | |||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Costamagna, P.; De Giorgi, A.; Gotelli, A.; Magistri, L.; Moser, G.; Sciaccaluga, E.; Trucco, A. Fault Diagnosis Strategies for SOFC-Based Power Generation Plants. Sensors 2016, 16, 1336. https://doi.org/10.3390/s16081336
Costamagna P, De Giorgi A, Gotelli A, Magistri L, Moser G, Sciaccaluga E, Trucco A. Fault Diagnosis Strategies for SOFC-Based Power Generation Plants. Sensors. 2016; 16(8):1336. https://doi.org/10.3390/s16081336
Chicago/Turabian StyleCostamagna, Paola, Andrea De Giorgi, Alberto Gotelli, Loredana Magistri, Gabriele Moser, Emanuele Sciaccaluga, and Andrea Trucco. 2016. "Fault Diagnosis Strategies for SOFC-Based Power Generation Plants" Sensors 16, no. 8: 1336. https://doi.org/10.3390/s16081336