
Adaptive Information Dissemination Control to Provide Diffdelay for the Internet of Things


Abstract
:1. Introduction
- (1)
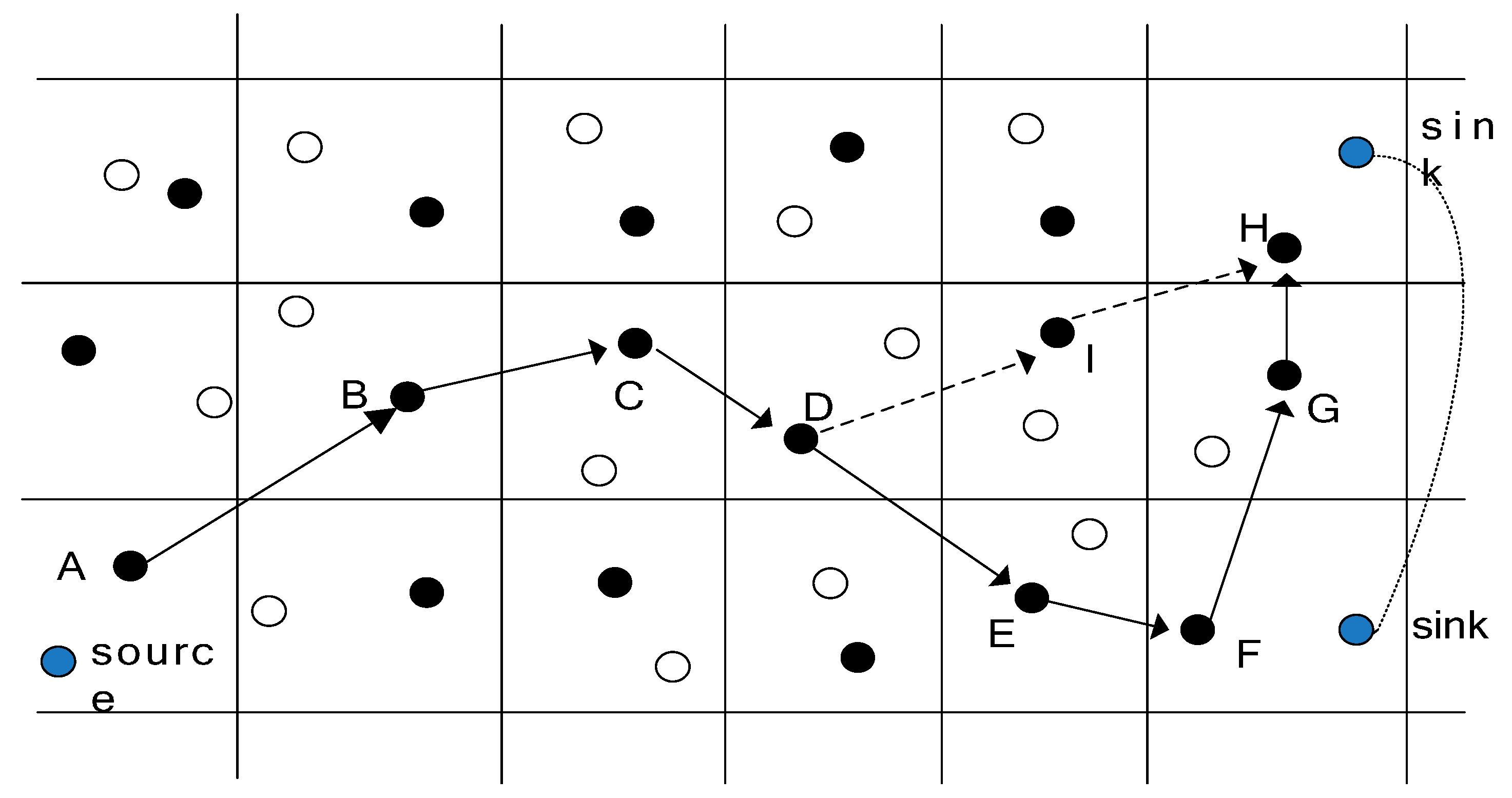
- Because actuators and targets may move randomly in the WSANs, the problem of how to send messages to actuators quickly and at low cost for urgent events cannot be easily resolved. It is critical to establish a route between actuators and events that enables the event to identify an actuator by some method. The flooding diffusion algorithm [8,18] is often used: actuators broadcast their location in WSANs, so all sensor nodes in the network can know the position of the actuators, and then the message can be sent to the actuators. Because so much energy can be consumed in routing diffusion algorithms, the routing diffusion method is not feasible in practice. In [8], Chi et al. proposed a tracking-assisted routing scheme to maintain the route between event and actuators without routing diffusion; however, this method only applies in cases in which a communication routing path from target to actuators can be established. For a sudden event such as a fire, the source node of the event (SNE) knows only the beginning position of the actuators. Therefore, using a tracking-assisted routing method can cause longer delays and higher energy consumption. Thus, a low-cost method that can be applied to different types of routes between event and actuators would be highly significant.
- (2)
- Different events have different sensitivities to delay. Previous schemes, using the same method to solve this problem, rendered it difficult to meet the application requirements. It is crucial to send a message to actuators quickly for a delay-sensitive event; the issue of energy efficiency often gives way to the problem that the message should be sent to the actuator quickly [25,27,31,32,33,34]. For an interesting event, energy consumption and network lifetime are important indicators; however, delay is not the most important indicator. There is a conflict between energy effectiveness and delay. Therefore, a significant research topic is how to adapt differentiated delays to different requirements.
- (1)
- This paper proposes a differentiated delay framework for different delay-sensitive events in WSANs. To the best of our knowledge, the previous scheme used the same method to address events and cannot meet the various performance requirements of an event. The differentiated delay framework is proposed in this paper to resolve this conflict in WSANs. As a new type of solution to solve this problem, the differentiated delay framework is significant.
- (2)
- The ACCDS method can create tradeoff optimization between communication costs and delay using the adaptive control method and meeting the requirements of the application. In the ACCDS scheme, an event sends various numbers of searching actuator routing (SAR) routes according to different degrees of sensitivity to delay. The scheme involves sending many SAR routes for an urgent event to reduce the delay in searching for an actuator but sending a small number of SAR routes for an interesting event to reduce energy consumption and improve network lifetime. In addition, actuators initiate limited diffusion routing based on their location and the route situation of an event, which can not only greatly reduce the huge energy consumption reported in previous studies using flooding routing but can also correct detour paths in previous events by the routing diffusion method of actuators. Thus, this scheme can reduce the time required to transmit a message from the event to the actuator and reduce network energy consumption. The ACCDS scheme has higher performance than the previous scheme and can be used in any event or scenario in WSANs.
- (3)
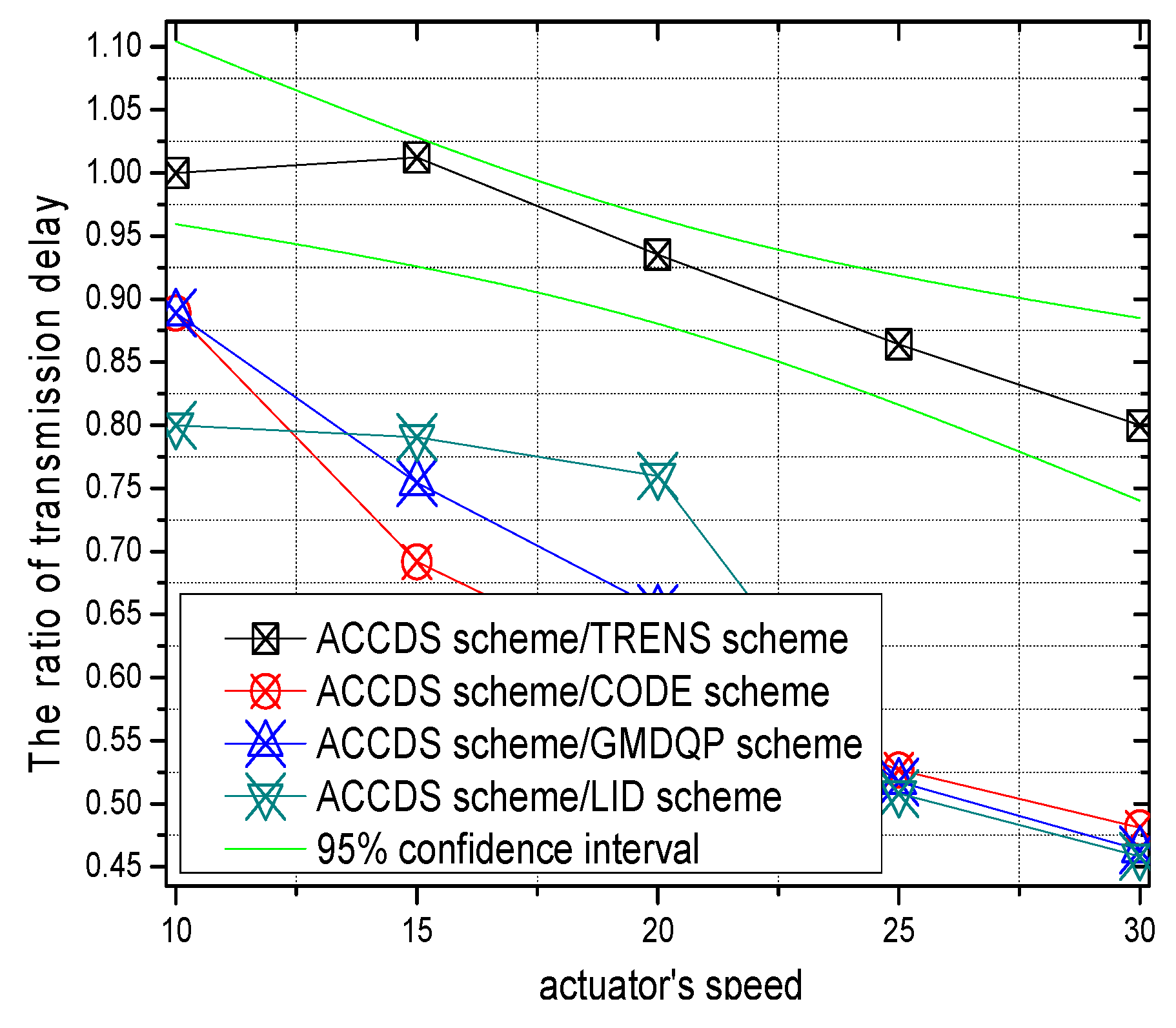
- Our extensive theoretical analysis and simulation study demonstrate that the ACCDS scheme can reduce delay for a delay-sensitive event by 20%–57.143%, and communication for an interesting event can be reduced by 43.563%–52.379%.
2. Related Work
- (1)
- Communication problems between sensor nodes and actuators. Selvaradjou et al. [14] noted that actuators have much greater energy and communication capabilities than sensor nodes do; thus, communication among actuators adopts communication methods with longer distances and higher throughput. Sensor nodes use communication manners with lower performance. Therefore, the system should adopt communication methods among actuators to the extent possible. However, for cost considerations, only a small number of actuators are deployed in WSANs; therefore, several partitions can be formed. The disadvantage of this plan is that the small number of actuators cannot satisfy the throughput of application requirements, and the large number of actuators is costly. Selvaradjou et al. [14] proposed the problem of how to establish effective routing issues among actuators by sensor nodes. Long et al. [29] extended the study of Selvaradjou et al., proposing a High Throughput Disjoint Multi-path (HTDM) routing scheme that allows actors to simultaneously forward data by multiple disjointed paths to achieve high throughput transmissions. Their theoretical analysis and experimental results indicate that the HTDM scheme can improve network throughput and is sensible. However, those studies focused on how to provide effective communication so that the network can communicate with others effectively and has fast or high throughput. For urgent events, the delay is not an important issue. The delay requirement should be considered in a new scheme [35,36].
- (2)
- Studies on effective control actuator movement to improve data collection efficiency. In the above, the mobility of the actuator was not considered; the primary function of actuators is equivalent to sink nodes in WSNs. He et al. [26] proposed an Energy-Efficient Message Dissemination protocol (EMD) to collect data in delay-tolerant WSANs, grounded on the principle of “Carry-Disseminate-Store-and-Forward”. In EMD, the disseminated data can be stored in sensors in the movement process of the source actor. When the destination actuators pass the sensor nodes that store data, the stored data can be sent to destination actuators to achieve the purpose of data transmission. In these studies, the movement of actuators has been considered; however, the new location of the actuators cannot be properly stored in sensor nodes. It takes a long time to create a routing from source node to actuators, which reduces efficiency. For some delay-sensitive events, this method is low-efficiency. These plans do not consider delay. The efficiency in creating a route from actuators to event should be considered in the new scheme.
- (3)
- Studies on the comprehensive consideration of event message delay. In some literature, actors walk randomly around the network before detecting events. When an event occurs, the distance from the actuators to the event is longer, the transmitted distance of energy consumption from event to actuator is higher, and the time when actuators move to the position of the event is longer. Although this scheme considers the delay, a large event detection delay and higher energy consumption remain. Dong et al. [4] proposed an approach called RENDEZVOUS to accelerate the actor’s event-detecting process while maintaining minimal energy consumption of the sensor nodes. To achieve the above purpose, the actuators are controlled to move close to the event using Reinforcement Learning techniques. ORACLE is another approach to reducing the delay in actuators’ processing an event by predicting its location [30]. First, the proposal includes an event prediction scheme to predict an event by utilizing the maximum likelihood estimation. Based on the predicted results, the actuators are moved to the annex of the event in advance; thus, when the event occurs, the delay in addressing the event can be greatly reduced. Because the event and the actuators may move simultaneously, how to maintain effective communication is another research issue.
3. The System Model
3.1. The Network Model
- (1)
- According to several studies [2,3,12,29], a large number of sensor nodes and several actuators are randomly deployed in the WSAN. The maximum transmission ranges of actuators and sensor nodes are represented by and , respectively. The neighboring distance is the maximal reachable distance with the transmission power for neighboring sensors/actuators. For a given sensor/actuator, the sensors/actuators within its neighboring distance are its “neighboring sensors/actuators” or “neighbors”. Each sensor can receive information within the transmission radius and send information to actuators/sensors. We primarily focus on the protocol design in the routing layer. The data transmission in the MAC layer and link layer is simplified. The bandwidth, traffic load and network conditions, among other factors, have been simplified. This paper addresses how to reduce the delay, thus, the bandwidth, transfer delay, and losses are simplified, and the simplification is reasonable. Thus, this paper focuses on the delay.
- (2)
- Each node/actuator is aware of its location via the receiver of a global positioning system (GPS) or some other location-estimation device [3,28]. All sensor nodes receive the location of all actuators after the initial phase, when the event occurs. The message regarding this event is sent to actuators according to the stored location message. If actuators move to another location, a message regarding the new location is sent along horizontal and vertical directions. When the message regarding the event is transmitted to the sensor node that stores the actuators’ new location, the message is sent to actuators along this tracking path. All sensor nodes have limited energy whereas the actuators have unlimited energy.
3.2. Event Model
- (1)
- All sensor nodes are stationary, the actuator is movable, and the node churn is not considered. When detecting an event, the sensor node that receives the strongest signal becomes the source, and the sensing data must be routed to actuators via the wireless channel.
- (2)
- Events can be divided into a variety of situations. Events can also be divided into two types depending on whether the actuator is involved in the event: (a) an event can be resolved only when actuators move to the position of the event source, such as a fire; and (b) an event can be resolved without an actuator, for example, when the sensor node discerns an interesting animal event, the event message is sent to actuators to inform the actuators (tourists) of the current location and status of the animals. An event can be divided into levels depending on the degree of sensitivity to delay: Level 1 is the most sensitive to delay, and higher level numbers indicate less sensitivity to delay. The maximum allowable delay of levels is set at ; thus, . When the event message regarding an urgent event is transmitted to the actuators, the event sends a large number of actuators searching actuators routing. However, in practice, fire is Level 1, and the degree of sensitivity to delay is high, resulting in disastrous consequences without timely treatment. For an interesting event, however, the degree of sensitivity to delay is small, resulting in less damage without real-time updates of information. An event is produced by monitoring the destination. Because the monitoring destination may be stationary or moveable, an event may be stationary or moveable.
3.3. Energy Consumption Model and Related Definitions
3.4. Problem Statement
- (1)
- Scheme can meet different delay requirements for different events.The delay can be evaluated as the requirement time for transmitting data from event to actuator. Thus, the first target scheme is to minimize the delay of any event belonging to level on the premise that the delay is less than the maximum allowable delay . That is, different events have different delay requirements. The delays for transmitting data for different levels should meet the delay requirements of different levels and minimize delay:
- (2)
- Minimizing the cost of communications. The cost of communications is defined as the communication costs when events communicate with actuators. The cost of communications can comprise the following: (a) the event reports the requirement communications volume to actuators when the event occurs. The communications volume can be measured by the length of the path from event to actuators, denoted as ; (b) the cost of diffusing the routing information of actuators considers that the length of the diffusing packet of the actuator is equal to the length of the message. Thus, the cost can be measured by the hop number of diffusing information, denoted as ; (c) the communication costs for searching for actuators of an event is denoted as ; (d) the cost of sending a message from the actuators to the event is denoted as ; (e) the movement costs when actuators move to the location of an event, which can be displayed as the movement hop number of actuators, is denoted as . In this paper, we mainly focus on the protocol design in routing layer, the main concern in this paper is how to reduce the routing length. The formula of minimization of the communications costs can be expressed as follows:Generally, tradeoff optimization exists in the performance indexes above. Less delay leads to greater communications costs. In summary, the optimization purpose of the scheme in this paper is:
4. Design of the ACCDS Scheme
4.1. The Overview of the ACCDS Scheme
4.2. Preliminary Phase of ACCDS Scheme
4.3. Tracking Actuators and Events in the ACCDS Scheme
4.4. Dissemination Actuators’ Location Scheme in the ACCDS Scheme
| Algorithm 1: A bounded routing path to disseminate the location (BRPDL) of the actuators’ approach | |
| 1: | For each actuator that needs to disseminate its location Do |
| 2: | form a packet that includes tuples such as |
| (ID, .location, current-time, 1); | |
| 3: | send packet to the GH of location cell; |
| 4: | Do while is not at the cell of network boundary |
| 5: | send packet to the right GH ; |
| 6: | store the tuple (ID, .location, current-time); |
| 7: | ; |
| 8: | End Do; |
| 9: | Let be the GH of the cell, which locate; |
| 10: | send packet to the left GH ; |
| 11: | route to the left GH until network boundary, and store tuple (ID, .location, current-time) in each GH of routing path; |
| 12: | send packet to the up GH ; |
| route to the up GH until network boundary, and store tuple (ID, .location, current-time) in each GH of routing path; | |
| 13: | send packet to the down GH ; |
| route to the up GH until network boundary, and store tuple (ID, .location, current-time) in each GH of routing path; | |
| 14: | End For |
4.5. Creating Routing from Event to Actuator in the ACCDS Scheme
- (1)
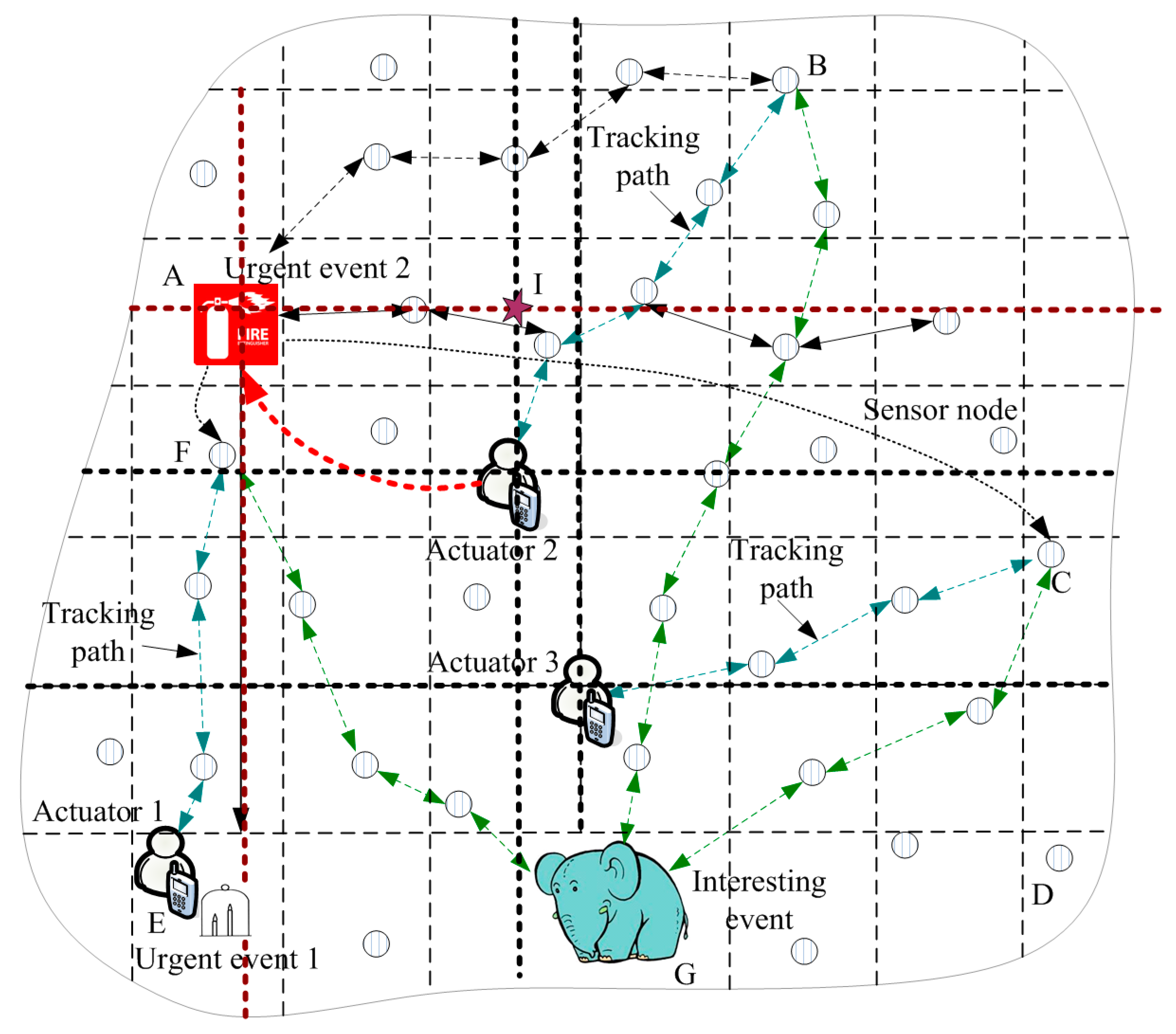
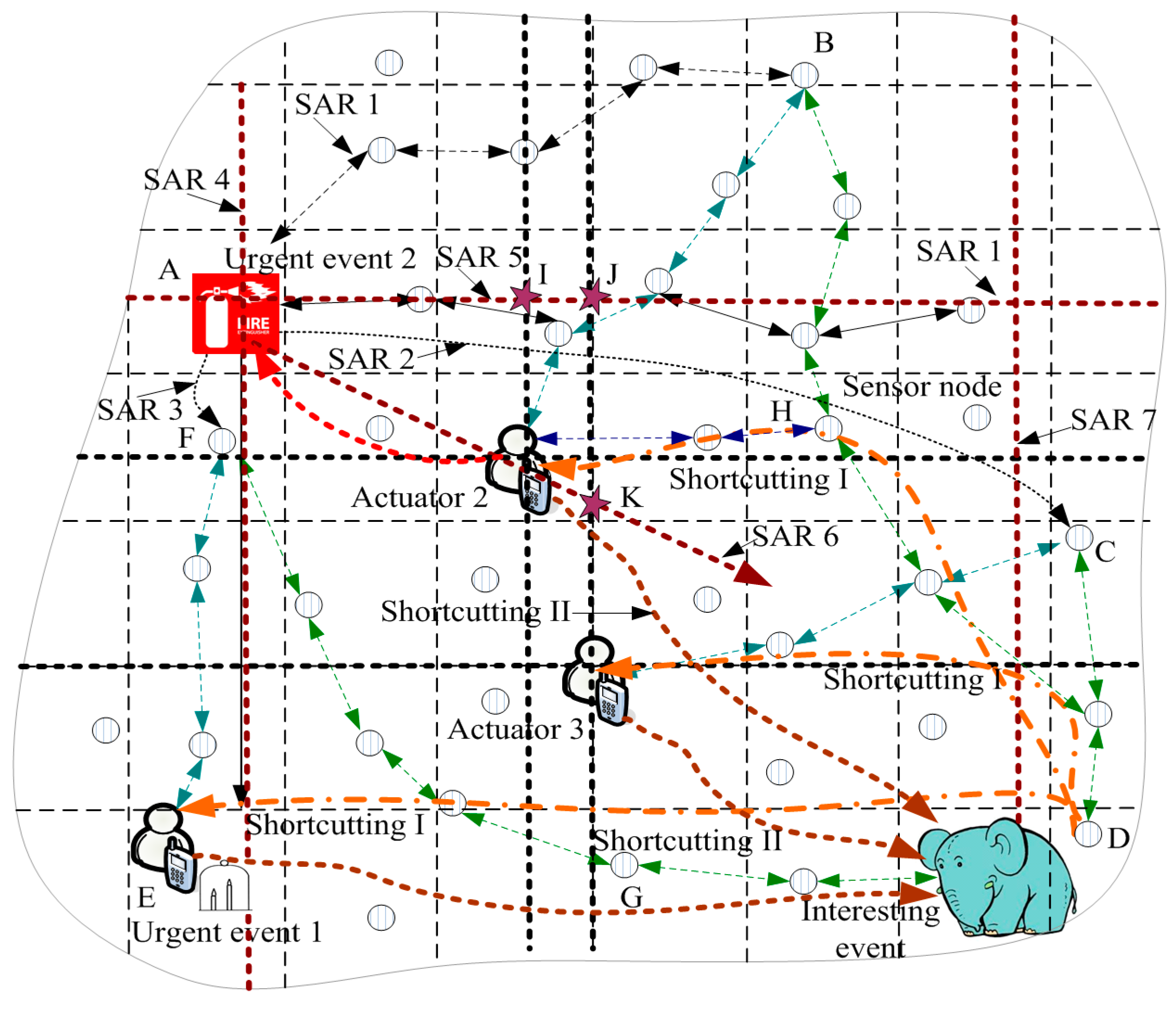
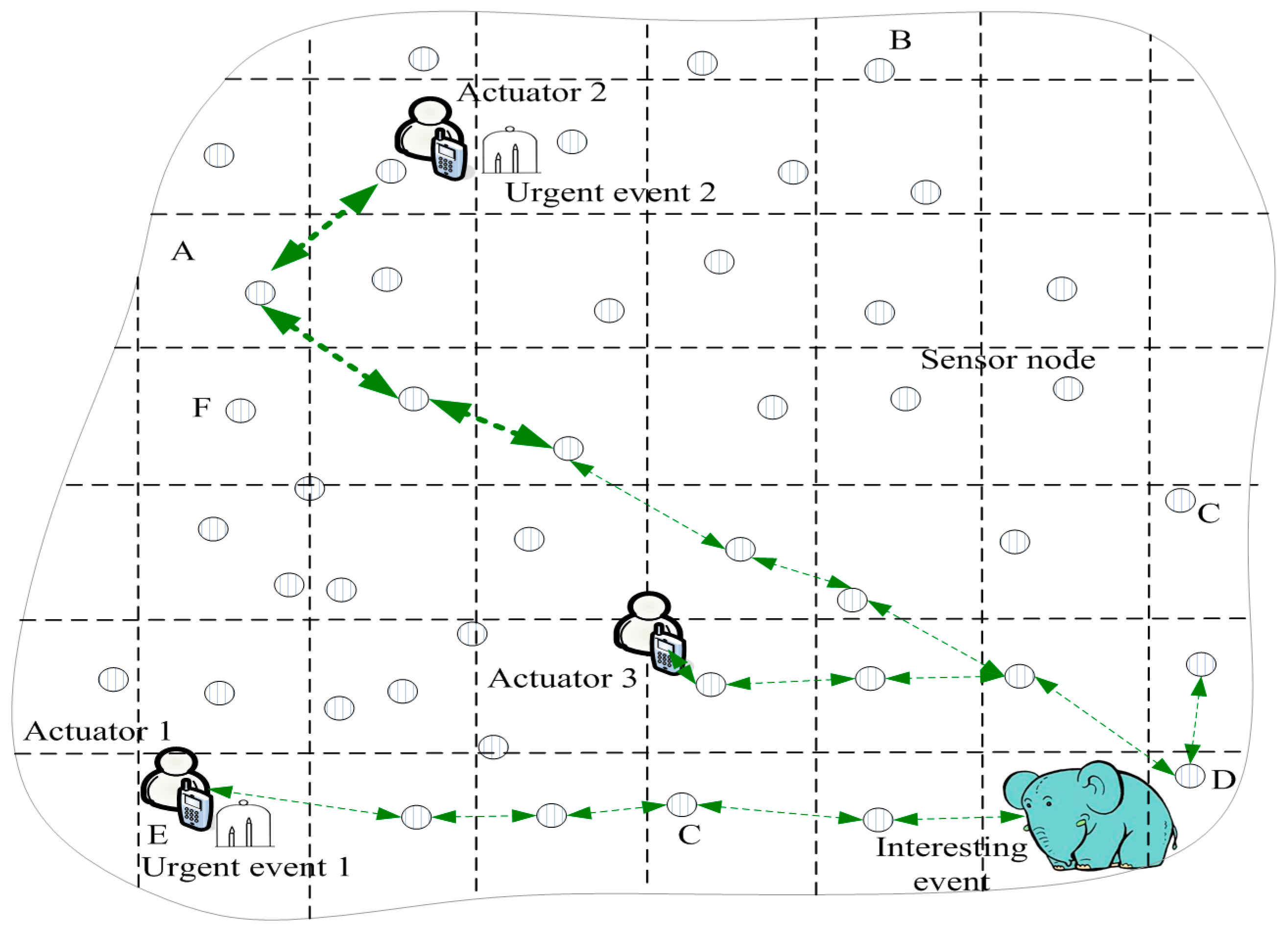
- Established active and updated mode. The ACCDS scheme adopts a differentiated delay approach: when event occurs, sends searching actuators routing (SAR) routings according to the sensitivity to delay of event . Those SAR routings contain the stored location information of the actuators in . For example, in Figure 4, stored the location information of , , and ; thus, the three routings of SAR 1, i.e., SAR 1, SAR 2, and SAR3, with destinations can be sent. However, the three routings of SAR 4, SAR 5, and SAR 6 are the routings for searching actuators without a destination. For an interesting event, the routings to , , and are established (regarded as a special SAR); only the searching routing, SAR 7, must be added. In an attempt to identify a better route, those routings should be evenly distributed over the network to obtain the best search results. The message in SAR routing should contain the event-ID, event-location, event-time, and multiple tuples. Each tuple for an actuator is similar to actuator-ID, actuator-location, latest-time, in which “event-time, latest-time” represent the time at which the event occurred and the location updated time of the actuator, respectively.SAR sends a query regarding this problem, asking whether the location information of the actuators is stored in a node that the SAR passes during the routing process of SAR. If the stored location message of the actuators is more current than the transmitted location message (such as ), then geographic routing can be initiated from the forwarding node to . A new geographic routing can be initiated when encountering new location information of the actuators. The original SAR continues moving forward until routed to the network edge or the SAR arrives at the actuators. For example, in Figure 4, SAR 5, initiated by , meets the location disseminated routing path of actuators and at the intersection of I and J, resulting in the geographic routing from I, J to , being launched. Obviously, compared with the length of the routing from the initial position to the actuator, the length of the path is greatly reduced. More SAR renders it more likely that the best routing will be identified; for example, the identified routing by SAR 6 initiated by is nearly optimal.Actuators can receive one of two types of messages from an event. The first type is an event that must be processed when the actuator moves to the event location. Actuators move to at this time. Another type is an event in which the actuator does not move. Actuators send a message directly to . The routing from to the actuators can be established (for example, in Figure 5, the routing is shortcutting II routing).
- (2)
- The automatically updated manner of processing message routing. If the message route of the event moves along the established routing path, which is from the event to , after a while, identifies the updated location information of in the routing path. The routing from to can be changed. In Figure 4, an interesting event is routed along the routing path of . If the location dissemination of the routing of has been completed, the interesting event can intersect the location disseminated routing path at point H. Thus, the routing path can be updated as . The routing path from interesting event to , can also be updated in the same fashion (see Figure 4). Creating the event to the actuators’ routing scheme can be described as Algorithm 2.
| Algorithm 2: Creating the event to the actuators’ routing scheme | |
| Type 1: For event launch to create a routing path to the actuator; | |
| 1: | The event computes the number of SAR as |
| 2: | sends and tuple (event-ID, event-location, event-time) denoted as to the GH of the cell that locates; |
| 3: | forms a packet that includes and actuator-ID, actuator-location, and latest-time for each actuator; |
| 4: | launches a SAR to each actuator with packet ; |
| 5: | If the number of actuators < |
| 6: | launches - straight lines SAR, which are evenly distributed; |
| 7: | End if |
| 8: | For each GH in the SAR Do; |
| 9: | If stores updated location information of actuators; |
| 10: | launches a SAR to each up-to-date actuator; |
| 11: | End if; |
| 12: | End For; |
| 13: | For each actuator that receives the packet Do |
| 14: | If needs to move on |
| 15: | moves to ; |
| 16: | Else |
| 17: | launches a shortcutting II routing to ; |
| 18: | End if |
| Type 2: For message on the routing path to actuator; | |
| 19: | If , which forwards the message, has updated location information of actuator ; |
| 20: | The routing path update routing path to the new location of ; |
| 21: | End if; |
5. Performance Analysis and Optimization
5.1. The ACCDS Scheme Optimization
- (1)
- The time for launching location disseminate routing of an actuator depends on the movement of the actuators. Clearly, if the movement path of an actuator is long, the location information must be diffused over a longer distance to obtain the location of the actuator. Thus, the information can be diffused by the event along the last diffusion routing, then along the tracking path to the actuator. Thus, the longer the moving distance is, the longer the tracking path is, increasing the delay and costs. Conversely, if the actuator has not been moved, it is not necessary to diffuse location information because the stored information in sensor nodes is the current status. The cost-based method is used in this paper; that is, when the obtained revenue for diffusing location information is greater than its cost, the BRPDL algorithm can be used. The required cost of the BRPDL algorithm, the energy consumption process, is as follows: The network is areas, and the edge length of each cell is . The number of the GH is . The diffusion routing is launched in the GH. The number of the GH in a diffusion routing is , and the number for launching location diffusion is 2. The energy consumption for the position diffusion algorithm is Equation (6), where , are energy consumption for receiving and sending a packet:Because the number of events reported by is , the movement distance from the last diffusion location to the current location is hops. The current position of is (), and the current position of event is (). The hop number from event to the last diffusion position is . The straight hop number from event to is , and the average number of sending packet of after one update, is . Thus, the payoff of for event after the last position is:The total payoff of after the location is updated is thus:After moves to a new location, when > , the position diffusion algorithm can be initiated:
- (2)
- The time of initiating shortcutting II route of the actuator. The cost is when launches a shortcutting II routing for event , and the payoff is , where is the number of the sending packet after the shortcutting II route is updated once. Obviously, when > , launches a shortcutting II route for event .
- (3)
- The time of sponsoring a SAR of an event. If an event has just occurred and the route from source to actuators cannot be established, SAR can be initiated. For an event for which the route to the actuator was previously established, SAR can be initiated by the event if the sensitivity to delay of the event is increased.
- (4)
- The number of SARs. In the ACCDS scheme, the number of SARs is adaptively adjusted based on the urgency of the event. First, SAR sends the route to the actuator to ensure that the actuator can be located. Second, initiating SAR can be initiated in vertical and horizontal directions. It can be ensured that the route must intersect with the diffusion route of the actuators, allowing the actuators to be located quickly. However, for an event that is extremely sensitive to delay, more SARs can be initiated from many directions. The minimum number of SARs is the number of actuators. For an interesting event, adding a SAR in the horizontal direction can meet the application requirements. For an event of average urgency, another vertical strip of SAR is added to the front of the base. For a high-urgency event, adding another 1–2 SARs can meet the needs of applications.
5.2. Performance Analysis
6. Experimental Results and Analysis
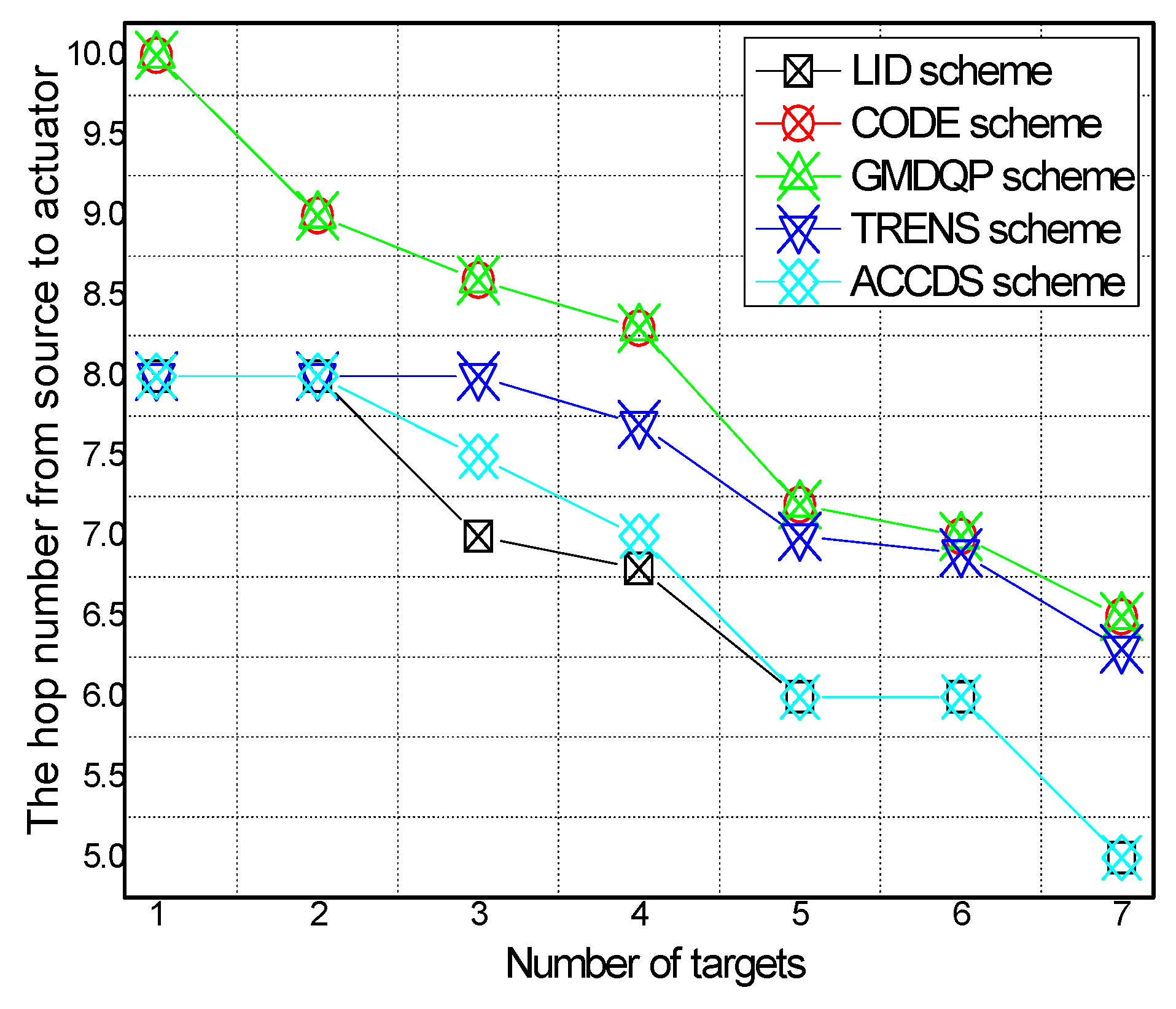
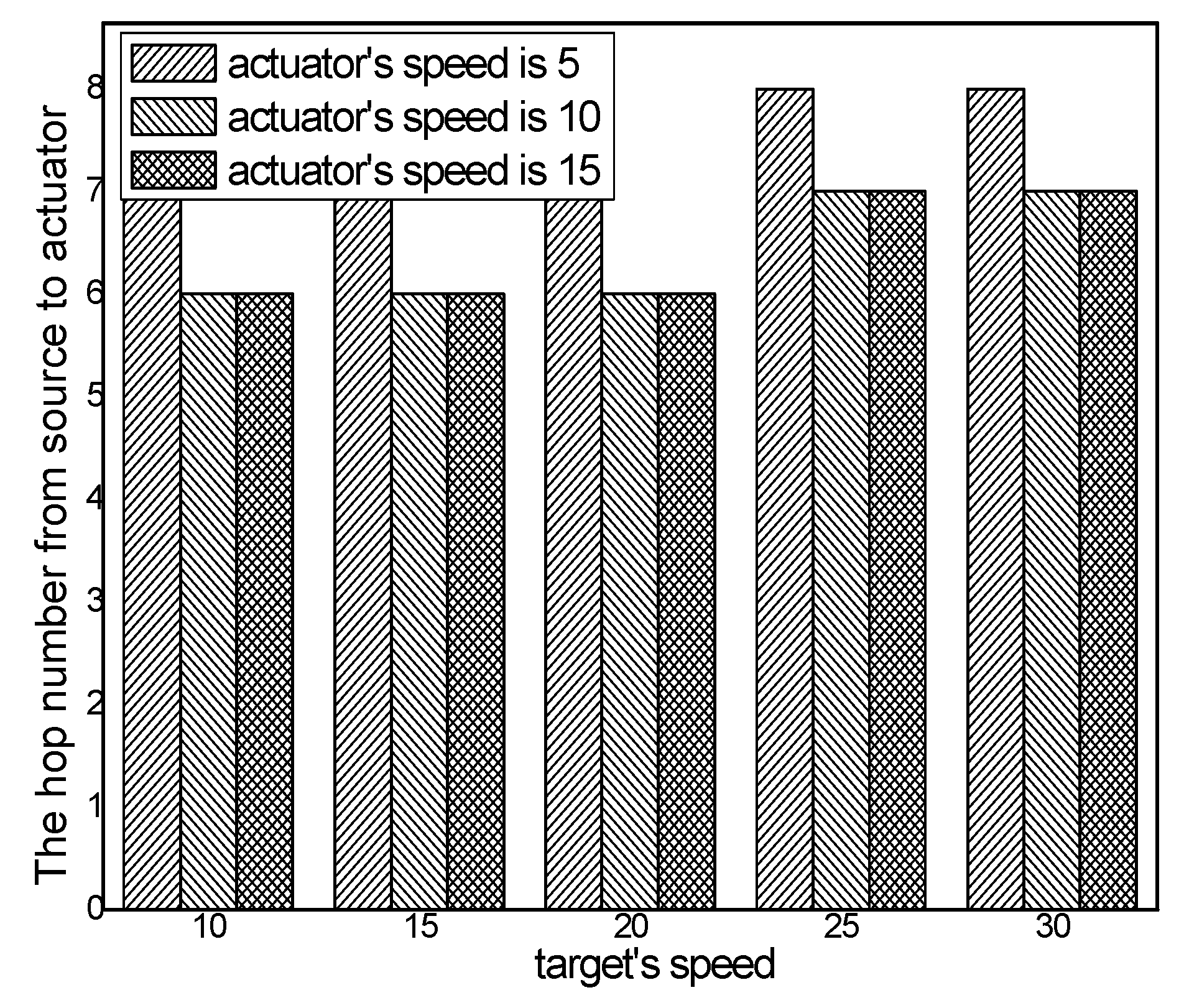
6.1. Experimental Results of the Hop Number from Source to Actuator
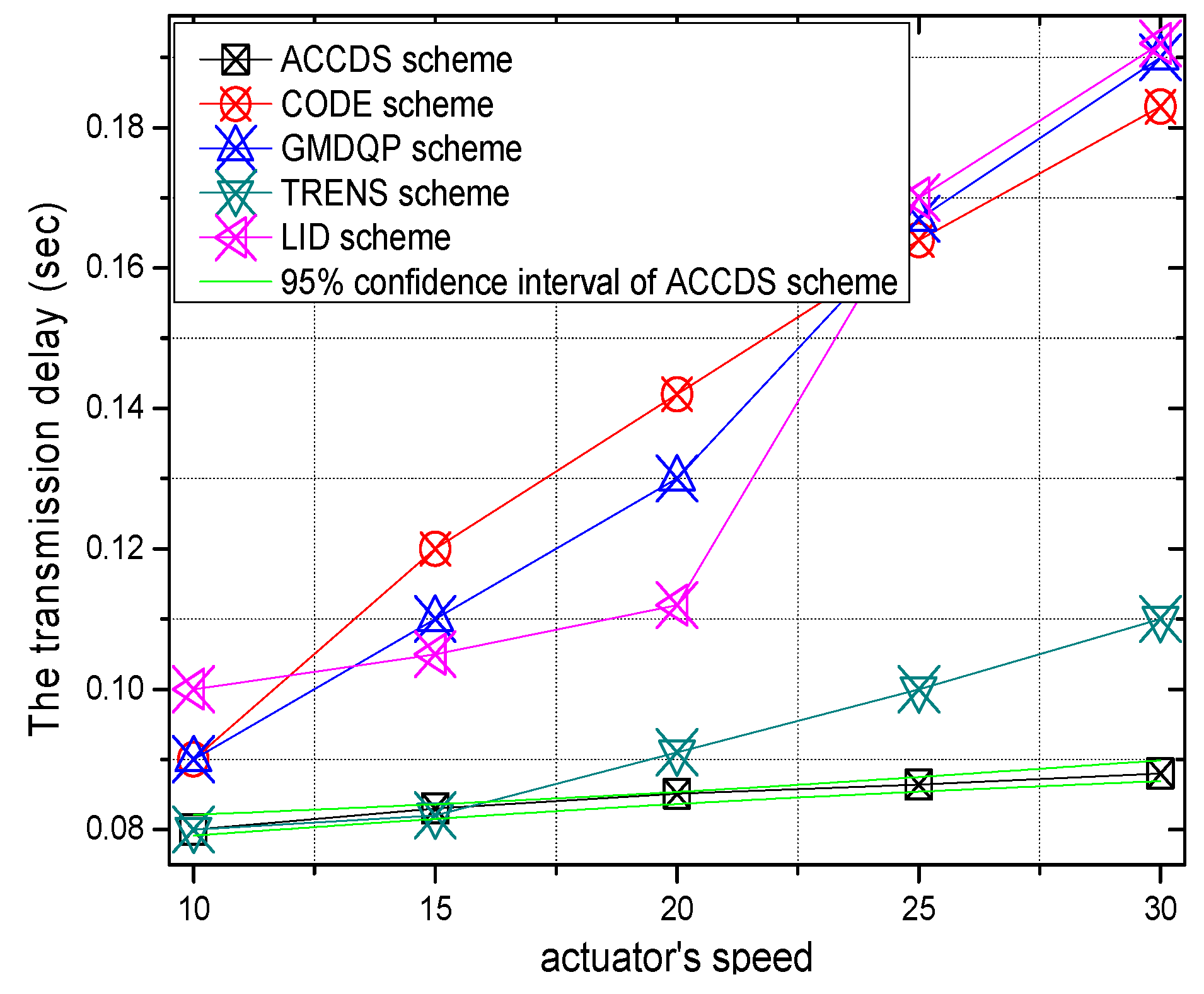
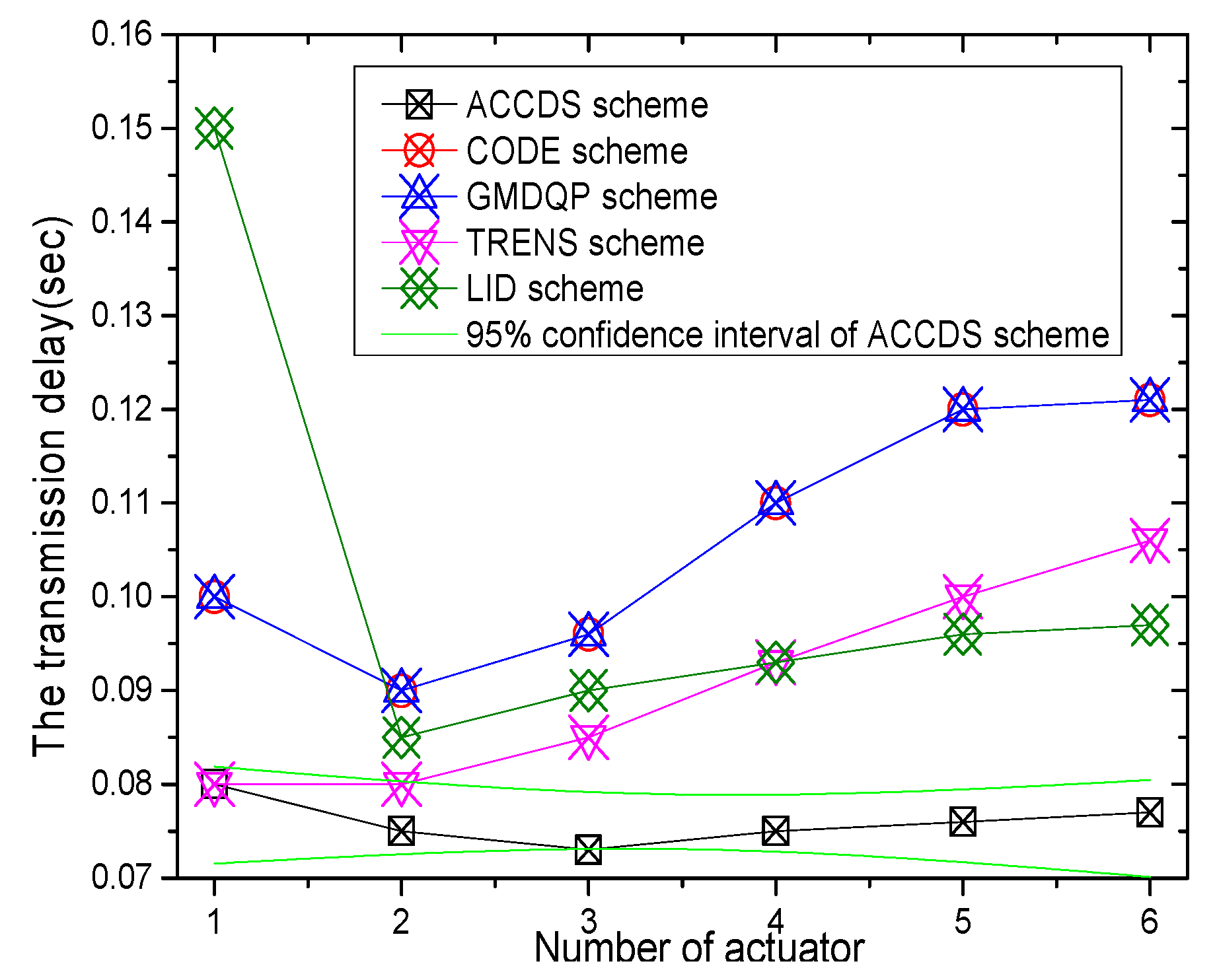
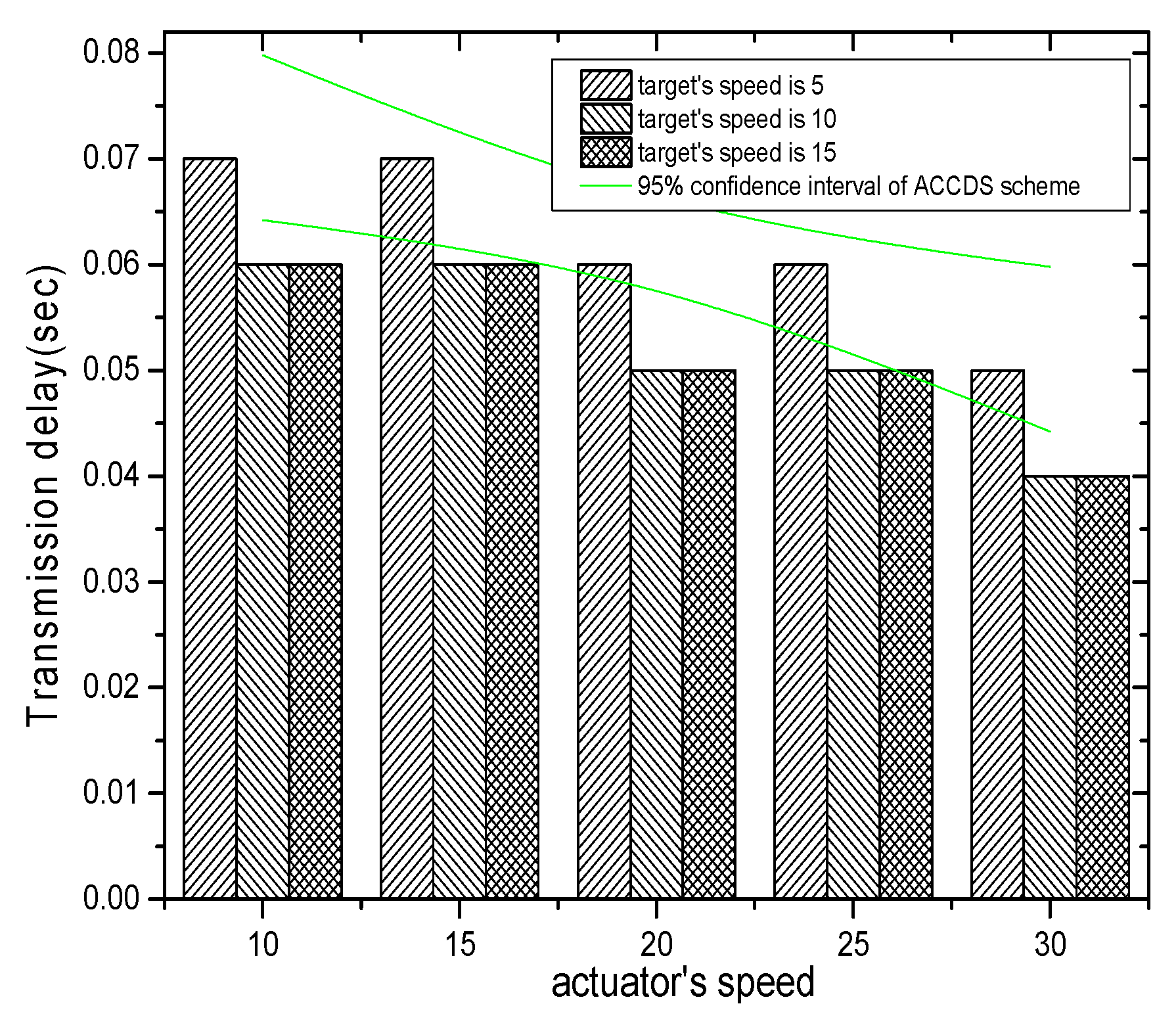
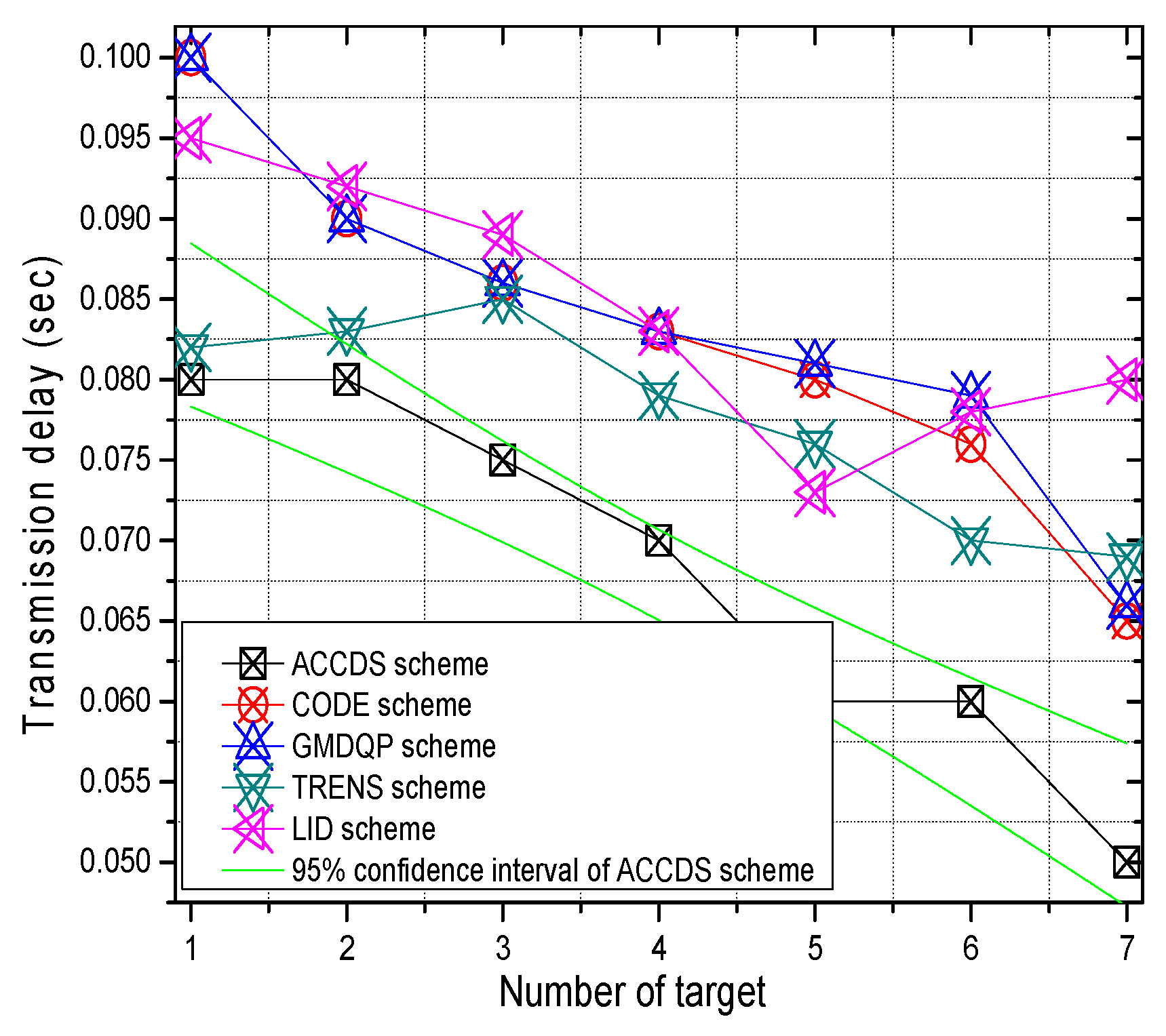
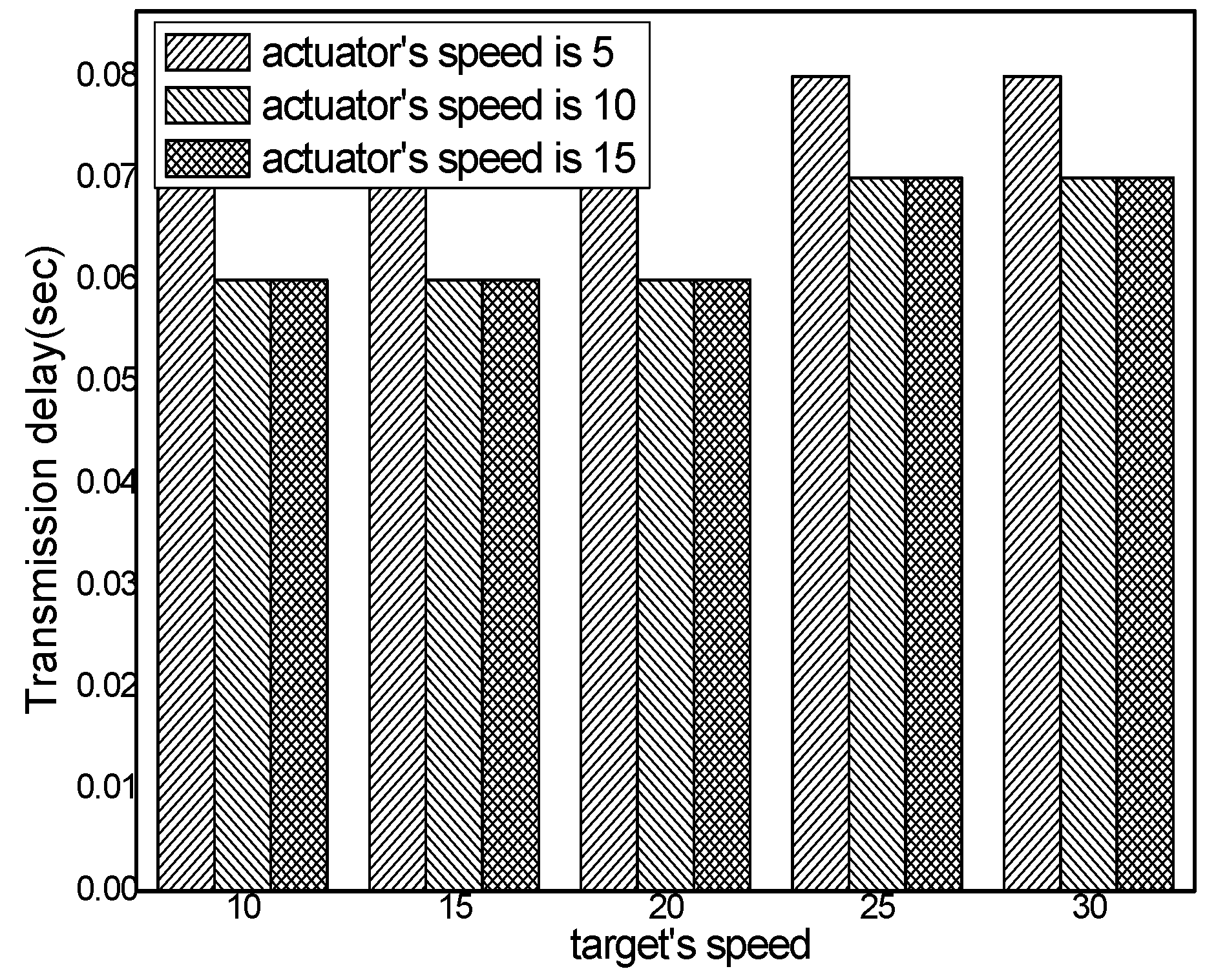
6.2. Experimental Results of Transmission Delay
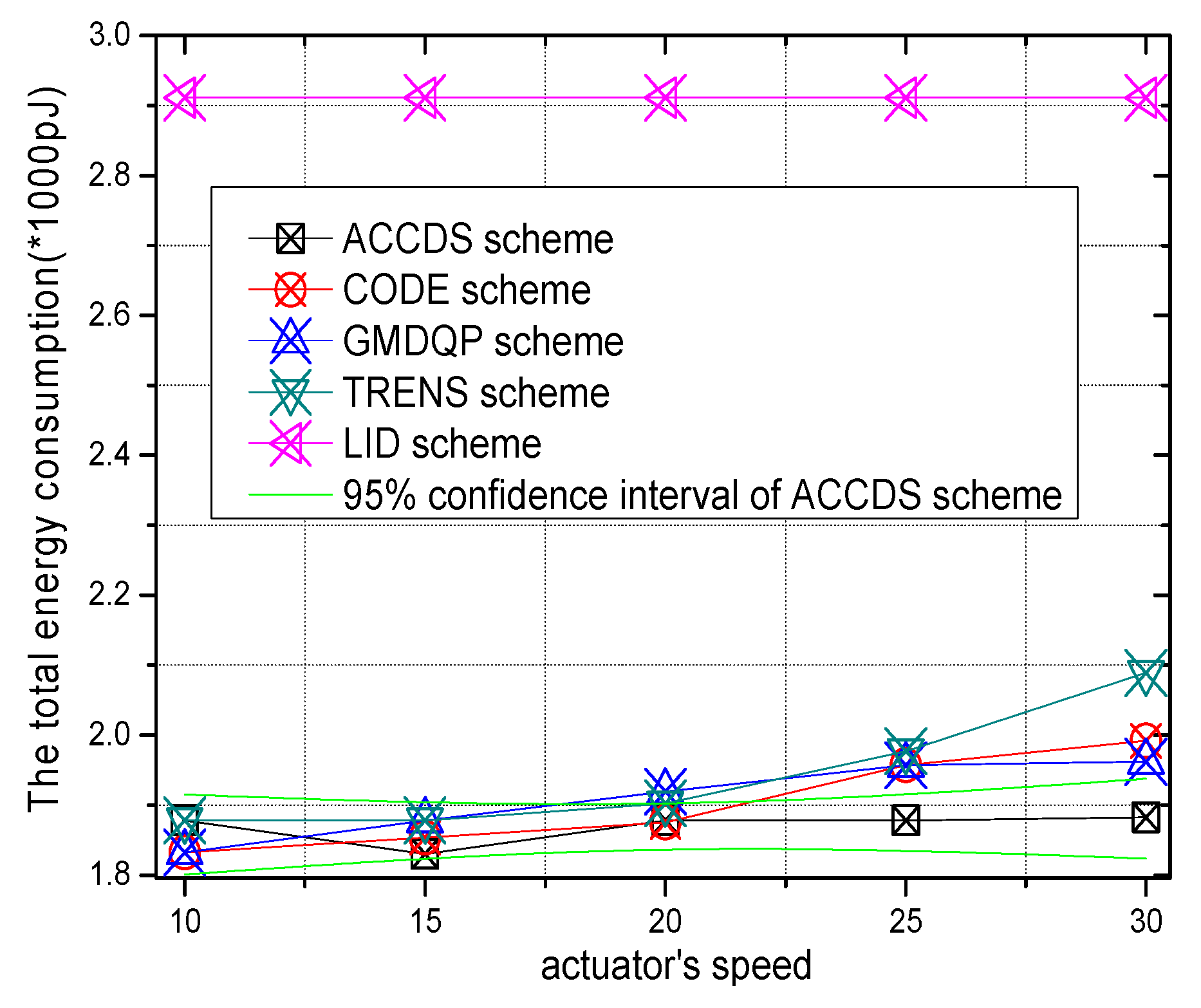
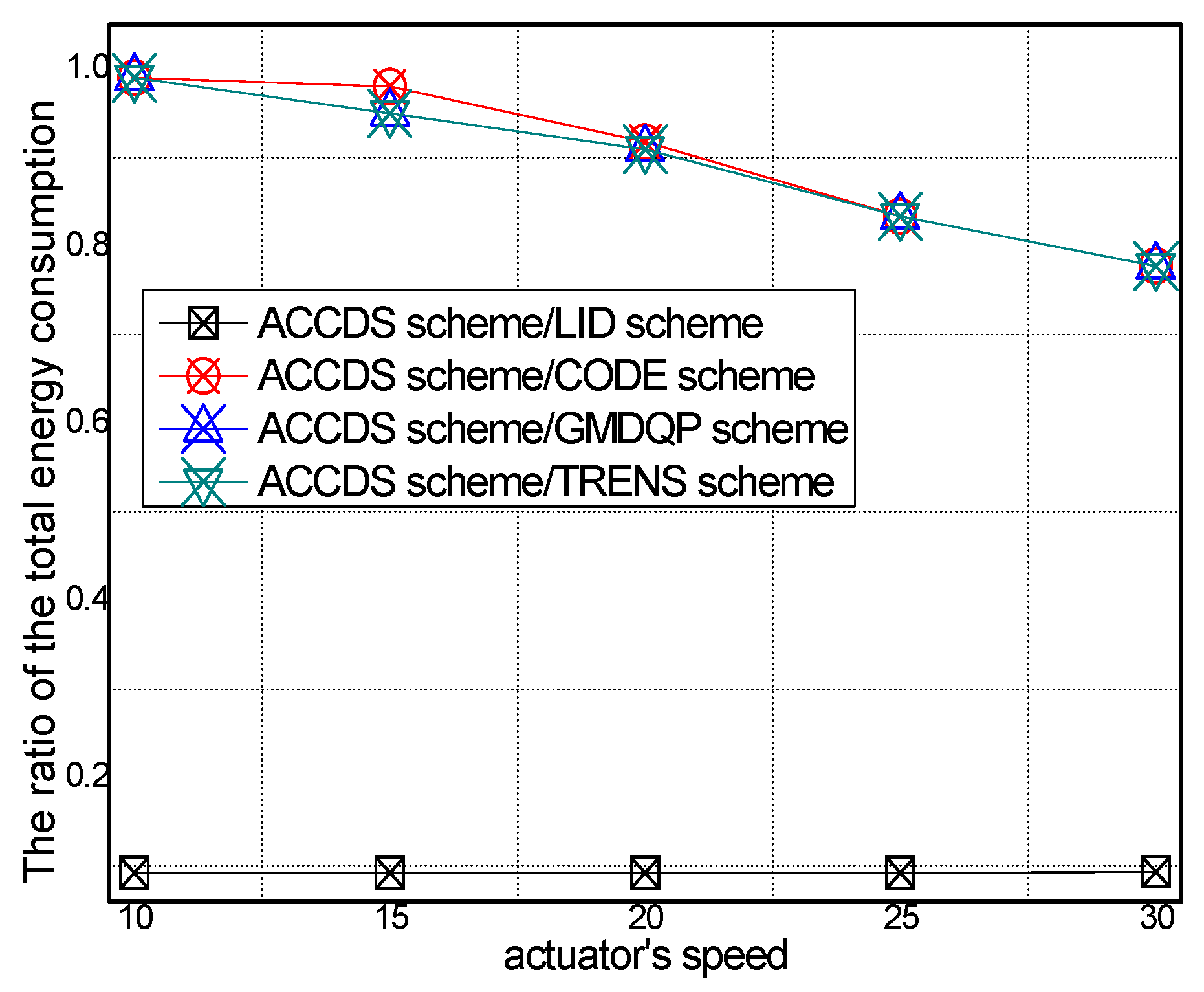
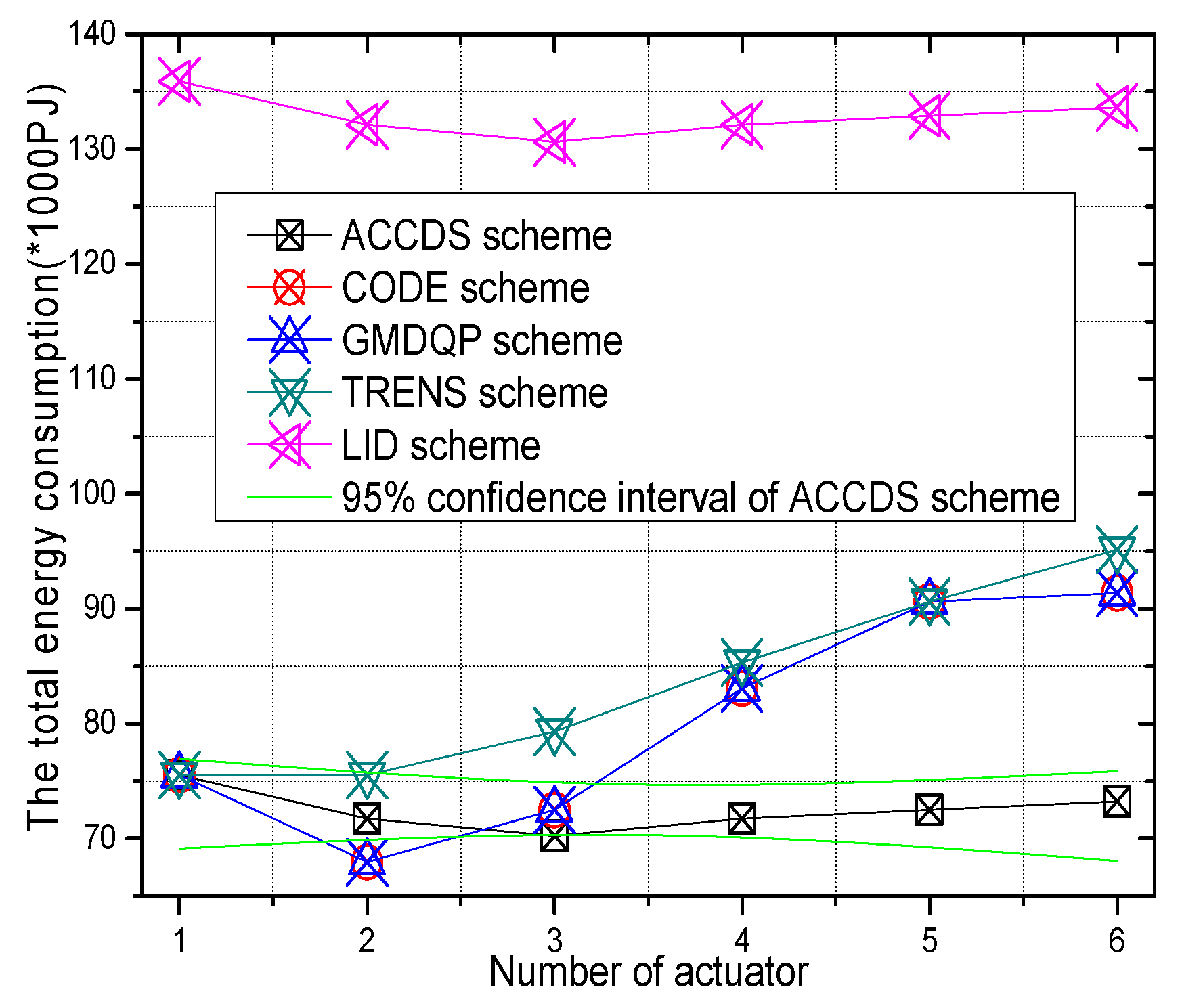
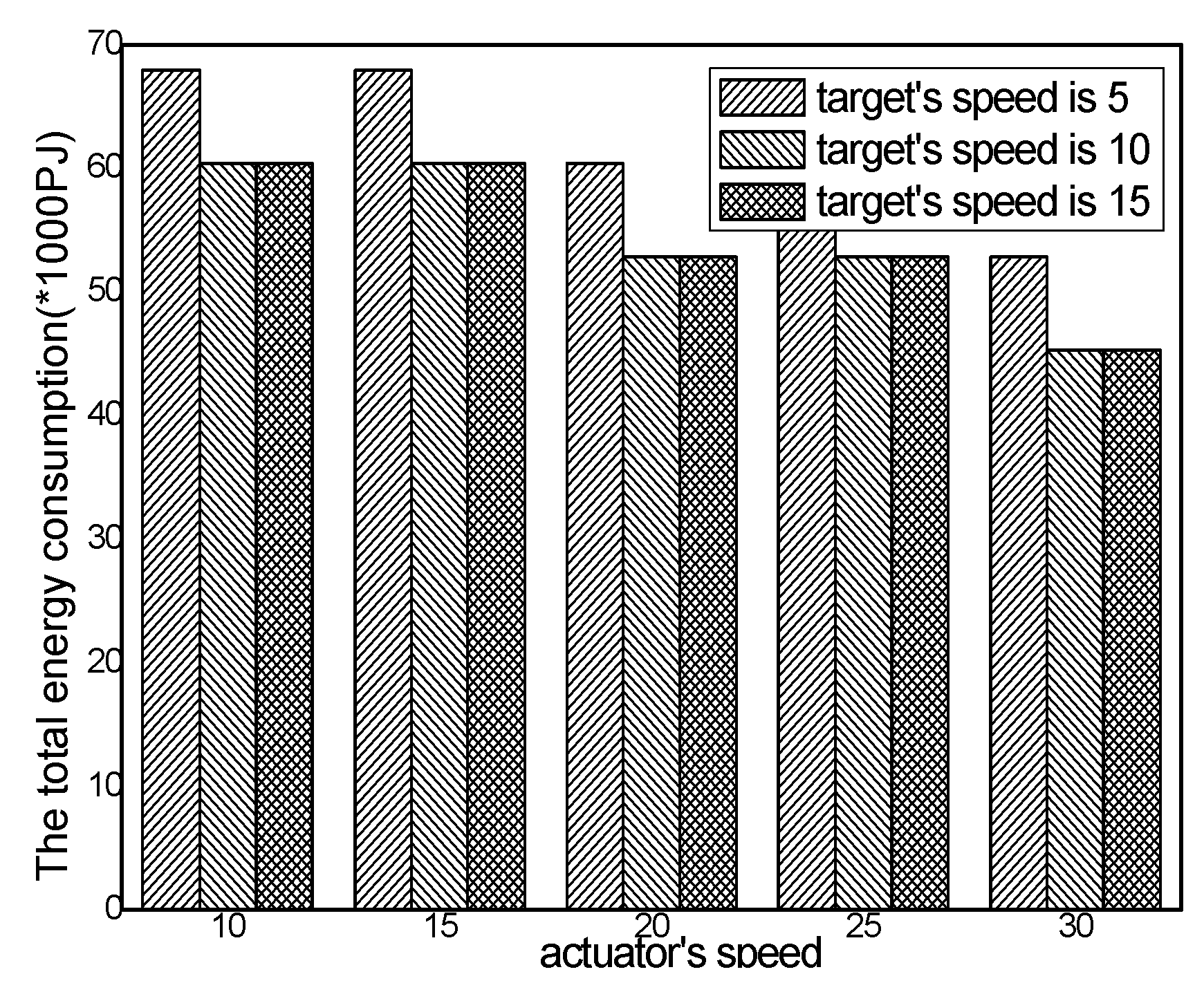
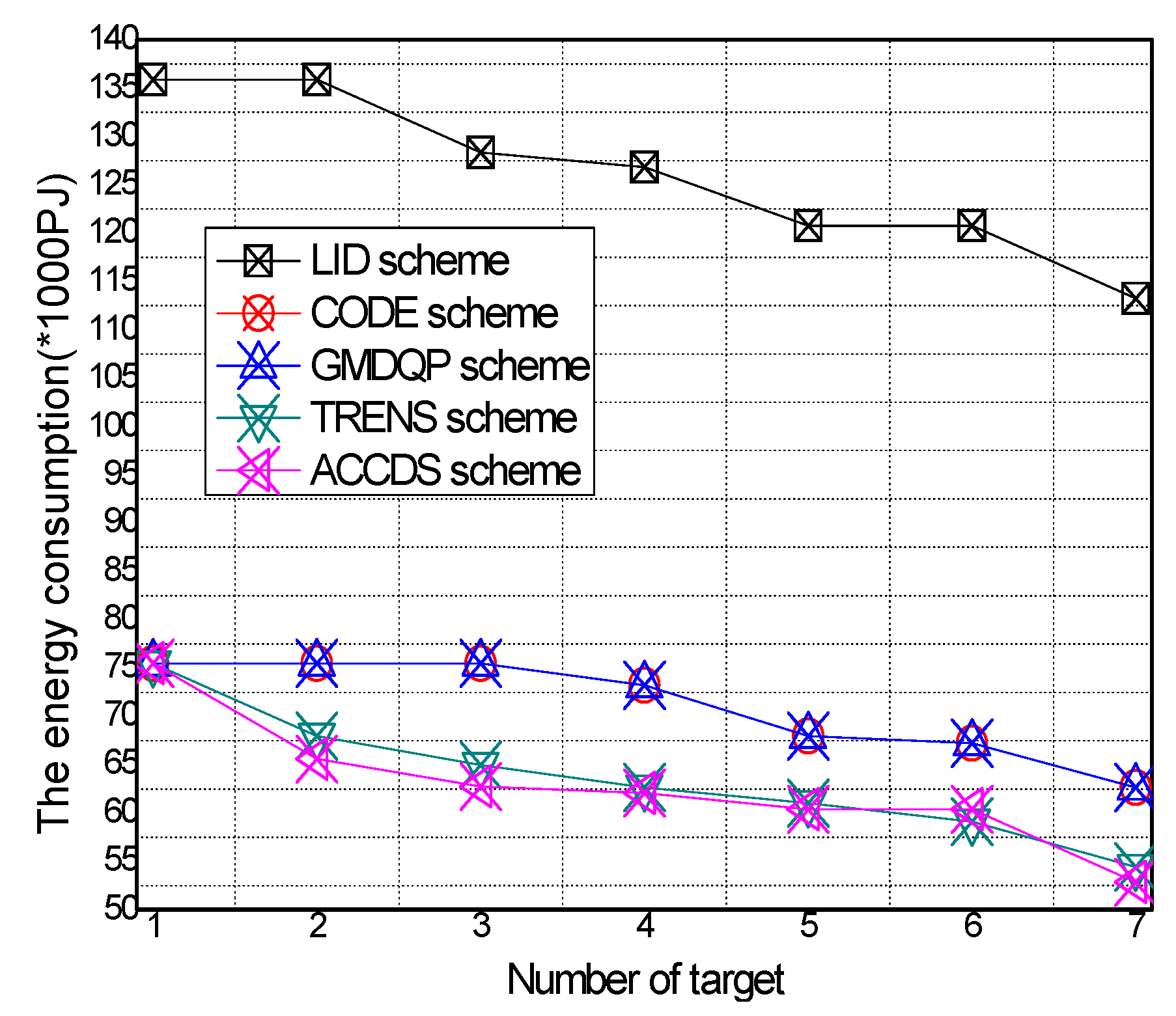
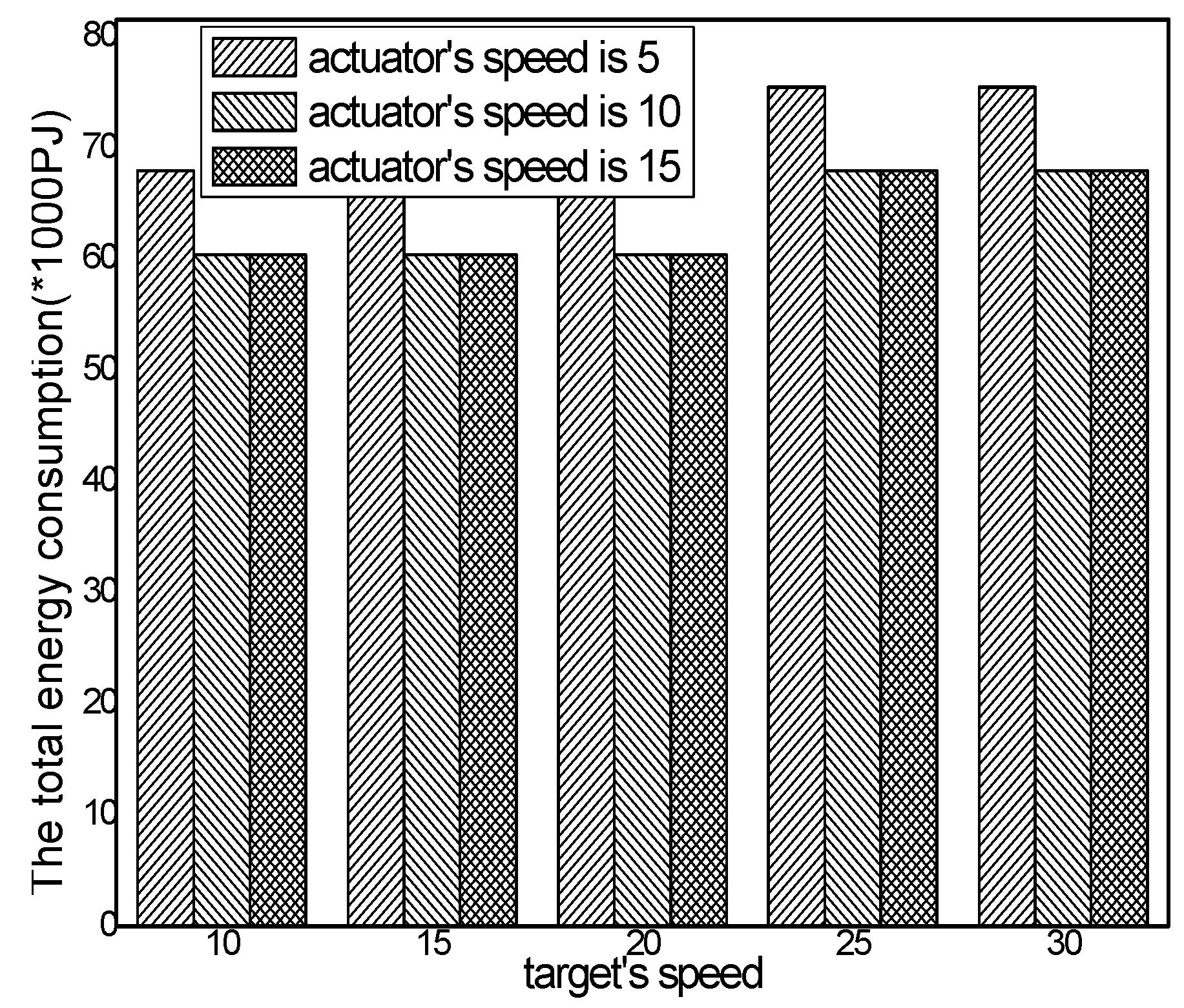
6.3. Experimental Results of Energy Consumption
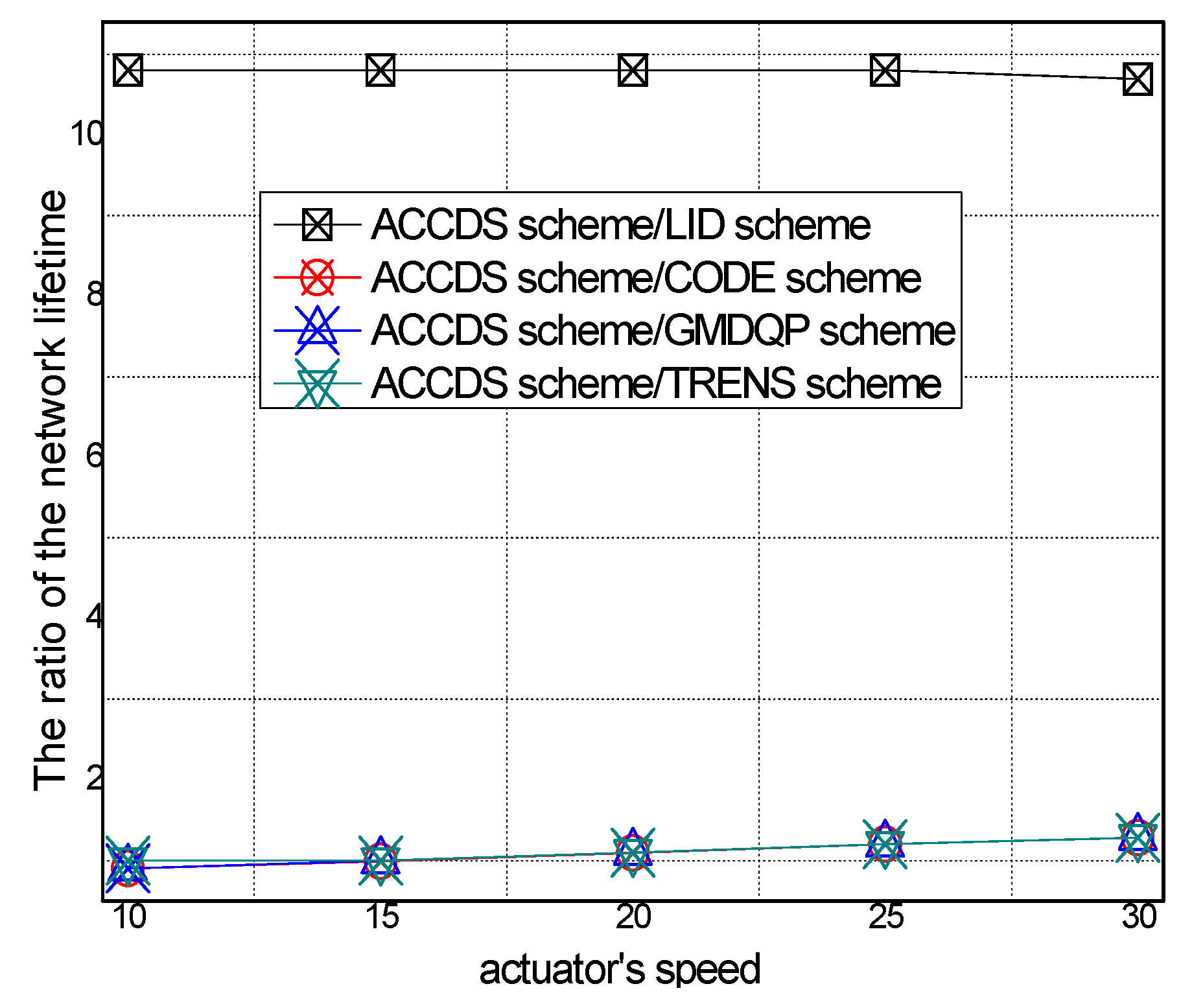
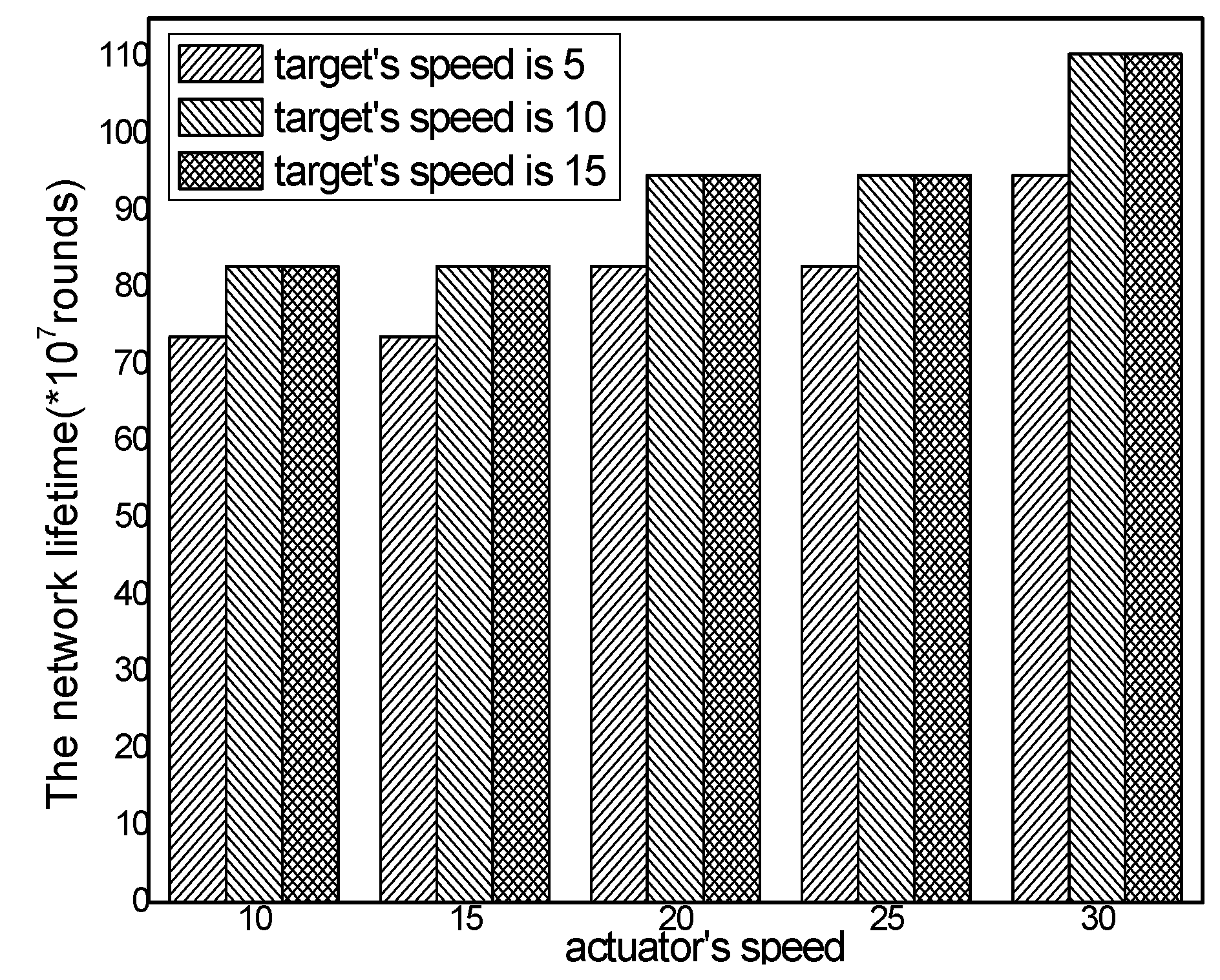
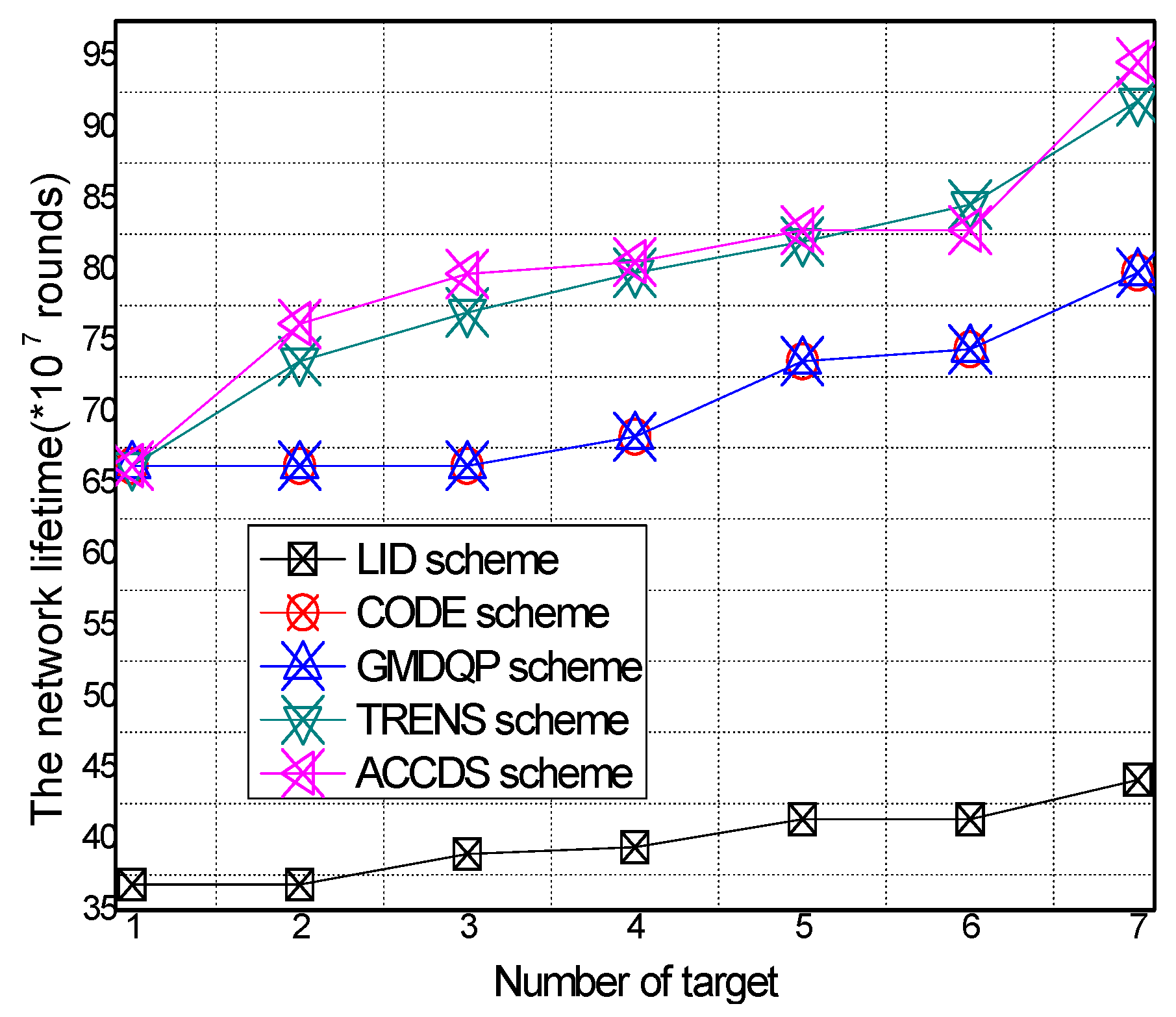
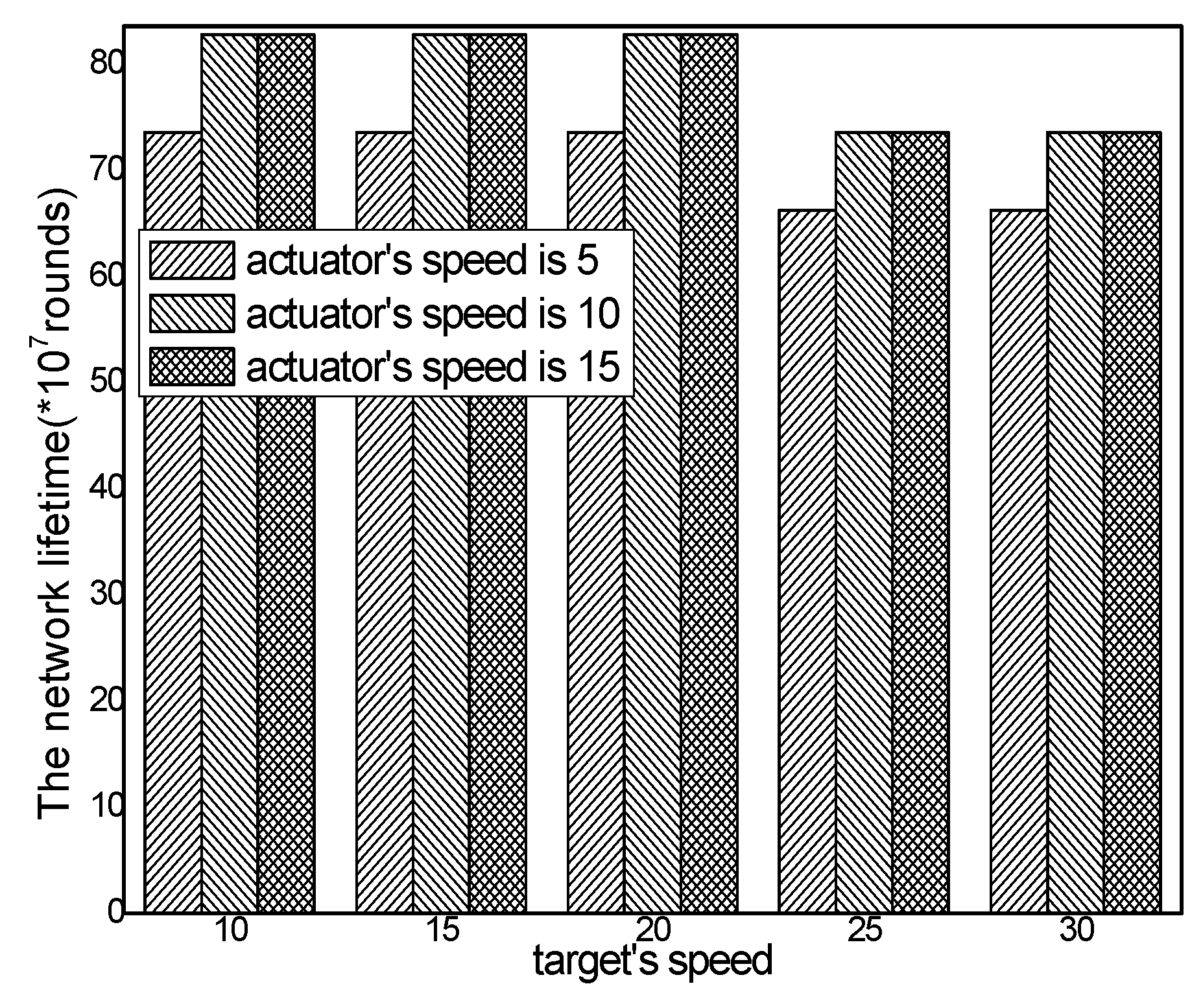
6.4. Network Lifetime
7. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sun, Y.; Song, H.; Jara, A.J.; Bie, R. Internet of Things and Big Data Analytics for Smart and Connected Communities. IEEE Access 2016, 4, 766–773. [Google Scholar] [CrossRef]
- Zhang, K.; Han, Q.; Cai, Z.; Yin, G.; Lin, J. DOAMI: A distributed on-line algorithm to minimize interference for routing in wireless sensor networks. Theor. Comput. Sci. 2016. [Google Scholar] [CrossRef]
- Duan, Z.; Yan, M.; Cai, Z.; Wang, X.; Han, M.; Li, Y. Truthful Incentive Mechanisms for Social Cost Minimization in Mobile Crowdsourcing Systems. Sensors 2016, 16, 481. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.X.; Dong, M.X.; Ota, K.; Liu, A.F. ActiveTrust: Secure and Trustable Routing in Wireless Sensor Networks. IEEE Trans. Inf. Forensics Secur. 2016, 11, 2013–2027. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, Z.; Yin, G.; Gao, Y.; Tong, X.; Wu, G. An incentive mechanism with privacy protection in mobile crowdsourcing systems. Comput. Netw. 2016, 102, 157–171. [Google Scholar] [CrossRef]
- Sun, Y.; Bie, R.; Thomas, P.; Cheng, X. Theme issue on advances in the Internet of Things: Identification, information, and knowledge. Pers. Ubiquitous Comput. 2015, 19, 985–987. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, A.; Li, Z.; Choi, Y.; Li, J. Distributed Duty Cycle Control for Delay Improvement in Wireless Sensor Networks. Peer-to-Peer Netw. Appl. 2016. [Google Scholar] [CrossRef]
- Sun, Y.; Bie, R.; Thomas, P.; Cheng, X. Advances on data, information, and knowledge in the internet of things. Pers. Ubiquitous Comput. 2014, 18, 1793–1795. [Google Scholar] [CrossRef]
- Liu, X.; Dong, M.; Ota, K.; Yang, L.; Liu, A. Trace malicious source to guarantee cyber security for mass monitor critical infrastructure. J. Comput. Syst. Sci. 2016. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, A. An Unequal Redundancy Level Based Mechanism for Reliable Data Collection in Wireless Sensor Networks. EURASIP J. Wirel. Commun Netw. 2016, 2016, 258. [Google Scholar] [CrossRef]
- Su, Z.; Xu, Q.; Qi, Q. Big Data in Mobile Social Networks: A QoE Oriented Framework. IEEE Netw. 2016, 30, 52–57. [Google Scholar] [CrossRef]
- Selvaradjou, K.; Handigol, N.; Franklin, A.A.; Murthy, C.S.R. Energy-efficient directional routing between partitioned actuators in wireless sensor and actuator networks. IET Commun. 2010, 4, 102–115. [Google Scholar] [CrossRef]
- Hu, Y.; Dong, M.; Ota, K.; Liu, A.; Guo, M. Mobile Target Detection in Wireless Sensor Networks with Adjustable Sensing Frequency. IEEE Syst. J. 2016, 10, 1160–1171. [Google Scholar] [CrossRef]
- Dong, M.; Ota, K.; Liu, A. RMER: Reliable and Energy Efficient Data Collection for Large-scale Wireless Sensor Networks. IEEE Internet Things J. 2016, 3, 511–519. [Google Scholar] [CrossRef]
- Liu, A.; Liu, X.; Long, J. A trust-based Adaptive Probability Marking and Storage Traceback Scheme for WSNs. Sensors 2016, 16, 451. [Google Scholar] [CrossRef] [PubMed]
- Huang, G.; Chen, D.; Liu, X.X. A Node Deployment Strategy for Blindness Avoiding in Wireless Sensor Networks. IEEE Commun. Lett. 2015, 19, 1005–1008. [Google Scholar] [CrossRef]
- Xu, Q.; Su, Z.; Guo, Z. A Game Theoretical Incentive Scheme for Relay Selection Services in Mobile Social Networks. IEEE Trans.Veh. Technol. 2016, 65, 6692–6702. [Google Scholar] [CrossRef]
- Liu, X.; Wei, T.; Liu, A. Fast Program Codes dissemination for Smart Wireless Software Defined Networks. Sci. Program. 2016, 2016, 14. [Google Scholar] [CrossRef]
- Tang, Z.; Liu, A.; Huang, C. Social-aware Data Collection Scheme through Opportunistic Communication in Vehicular Mobile Networks. IEEE Access 2016, 4, 6480–6502. [Google Scholar] [CrossRef]
- Li, H.; Liu, D.; Dai, Y.; Luan, T. Engineering Searchable Encryption of Mobile Cloud Networks: When QoE Meets QoP. IEEE Wirel. Commun. 2015, 22, 74–80. [Google Scholar] [CrossRef]
- He, S.; Chen, J.; Jiang, F.; Yau, D.K.; Xing, G.; Sun, Y. Energy provisioning in wireless rechargeable sensor networks. IEEE Trans. Mob. Comput. 2013, 12, 1931–1942. [Google Scholar] [CrossRef]
- Yang, Q.; He, S.; Li, J.; Chen, J.; Sun, Y. Energy-efficient probabilistic area coverage in wireless sensor networks. IEEE Trans. Veh. Technol. 2015, 64, 367–377. [Google Scholar] [CrossRef]
- Tang, Z.; Liu, A.; Li, Z.; Choi, Y.; Hiroo, S.; Li, J. A Trust-based Model for Security Cooperating in Vehicular Cloud Computing. Mob. Inf. Syst. 2016, 2016, 9083608. [Google Scholar]
- Liu, A.; Liu, X.; Li, H.; Long, J. MDMA: A multi-data and multi-ACK verified Selective Forwarding Attack Detection Scheme in WSNs. IEICE Trans. Inf. Syst. 2016, E99-D, 2010–2018. [Google Scholar] [CrossRef]
- Gui, J.; Zhou, K. Flexible adjustments between energy and capacity for topology control in heterogeneous wireless multi-hop networks. J. Netw. Syst. Manag. 2016, 24, 789–812. [Google Scholar] [CrossRef]
- He, S.; Li, X.; Chen, J.; Cheng, P.; Sun, Y.; Simplot-Ryl, D. EMD: Energy-Efficient P2P Message Dissemination in Delay-Tolerant Wireless Sensor and Actuator Networks. IEEE J. Sel. Areas Commun. 2013, 31, 75–84. [Google Scholar]
- Akbaş, M.İ.; Turgut, D. Lightweight routing with dynamic interests in wireless sensor and actuator networks. Ad Hoc Netw. 2013, 11, 2313–2328. [Google Scholar] [CrossRef]
- Chi, Y.P.; Chang, H.P. A tracking-assisted routing scheme for wireless sensor networks. Wirel. Pers. Commun. 2013, 70, 411–433. [Google Scholar] [CrossRef]
- Li, H.; Yang, Y.; Luan, T.; Liang, X.; Zhou, L.; Shen, X. Enabling Fine-grained Multi-keyword Search Supporting Classified Sub-dictionaries over Encrypted Cloud Data. IEEE Trans. Dependable Secur. Comput. 2016, 13, 312–325. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, A.; Hu, Y.; Li, Z.; Choi, Y.J.; Sekiya, H.; Li, J. FFSC: An Energy Efficiency Communications Approach for Delay Minimizing in Internet of Things. IEEE Access 2016, 4, 3775–3793. [Google Scholar] [CrossRef]
- Li, H.; Lin, X.; Yang, H.; Liang, X.; Lu, R.; Shen, X. EPPDR: An Efficient Privacy-Preserving Demand Response Scheme with Adaptive Key Evolution in Smart Grid. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 2053–2064. [Google Scholar] [CrossRef]
- Cai, Z.; He, Z.; Guan, X.; Li, Y. Collective Data-Sanitization for Preventing Sensitive Information Inference Attacks in Social Networks. IEEE Trans. Dependable Secur. Comput. 2016. [Google Scholar] [CrossRef]
- Shi, T.; Cheng, S.; Cai, Z.; Li, Y.; Li, Z. Retrieving the Maximal Time-Bounded Positive Influence Set from Social Networks. Pers. Ubiquit. Comput. 2016, 20, 717–730. [Google Scholar] [CrossRef]
- Han, M.; Yan, M.; Cai, Z.; Li, Y.; Cai, X.; Yu, J. Influence Maximization by Probing Partial Communities in Dynamic Online Social Networks. Trans. Emerg. Telecommun. Technol. 2016. [Google Scholar] [CrossRef]
- Liu, A.; Zhang, Q.; Li, Z.; Choi, Y.; Li, J.; Komuro, N. A Green and Reliable Communication Modeling for Industrial Internet of Things. Comput. Electr. Eng. 2016. [Google Scholar] [CrossRef]
- Han, M.; Yan, M.; Cai, Z.; Li, Y. An Exploration of Broader Influence Maximization in Timeliness Networks with Opportunistic Selection. J. Netw. Comput. Appl. 2016, 63, 39–49. [Google Scholar] [CrossRef]
- Varga, A. The OMNET++ Discrete Event Simulation System, Version 4.1. Available online: http://www.omnetpp.org (accessed on 1 April 2013).






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Threshold distance (d0) (m) | 87 |
| Sensing range rs (m) | 15 |
| Eelec (nJ/bit) | 50 |
| efs (pJ/bit/m2) | 10 |
| eamp (pJ/bit/m4) | 0.0013 |
| Initial energy (J) | 0.5 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Liu, A.; Huang, C. Adaptive Information Dissemination Control to Provide Diffdelay for the Internet of Things. Sensors 2017, 17, 138. https://doi.org/10.3390/s17010138
Liu X, Liu A, Huang C. Adaptive Information Dissemination Control to Provide Diffdelay for the Internet of Things. Sensors. 2017; 17(1):138. https://doi.org/10.3390/s17010138
Chicago/Turabian StyleLiu, Xiao, Anfeng Liu, and Changqin Huang. 2017. "Adaptive Information Dissemination Control to Provide Diffdelay for the Internet of Things" Sensors 17, no. 1: 138. https://doi.org/10.3390/s17010138