An Energy Scaled and Expanded Vector-Based Forwarding Scheme for Industrial Underwater Acoustic Sensor Networks with Sink Mobility


 ,
,
Abstract
:1. Introduction
2. Previous Work
Motivation and Contributions
- The holding time of all the potential forwarders is scaled using the neighboring nodes’ energy information. It increases the holding time difference between them even for a small variation in the energy level of neighbors.
- The expanded proximity closeness ratio of the forwarding candidate nodes towards the virtual pipeline between sender and sink is added in holding time computation to signify the node preference.Both (1) and (2) scale and signify the holding time difference between the candidate forwarders for small parameter variance. This ensures that all nodes in the transmission range of the suitable forwarder (with minimum holding time) must receive copy of the packet before their holding time expiration.
- Each candidate forwarder uses its neighboring node information to find suitability to abbreviate its holding time duration to curtail the end-to-end delay.
- Energy efficiency and energy balancing are achieved by employing the normalized residual energy information of the neighboring nodes in the holding time and suppressing more number of packets.
- No constant parameters in the holding time estimation are used.
- The proposed scheme is analyzed in the network scenarios with and without sink mobility.
3. Proposed Scheme
3.1. Problem Statement
3.2. Preliminaries
- Neighbors of node i, (): All the nodes that are in form which i.where is the set of nodes in the network and is the euclidean distance between i and j in three-dimensional euclidean space:
- Potential Forwarding Zone (PFZ): PFZ is the region of between node (that currently forwarded the packet p) and Sink . PFZ is the subregion of of node S and the nodes in the region are called potential forwarder nodes (PFNs), which are preferable to further relay p. Any point in 3D euclidean space is considered to be in the PFZ of S, if it satisfies the following conditions:Neighbors of node i that are in PFZ of S:
3.3. Estimation of
| Algorithm 1: Proposed data Packet Forwarding Algorithm. |
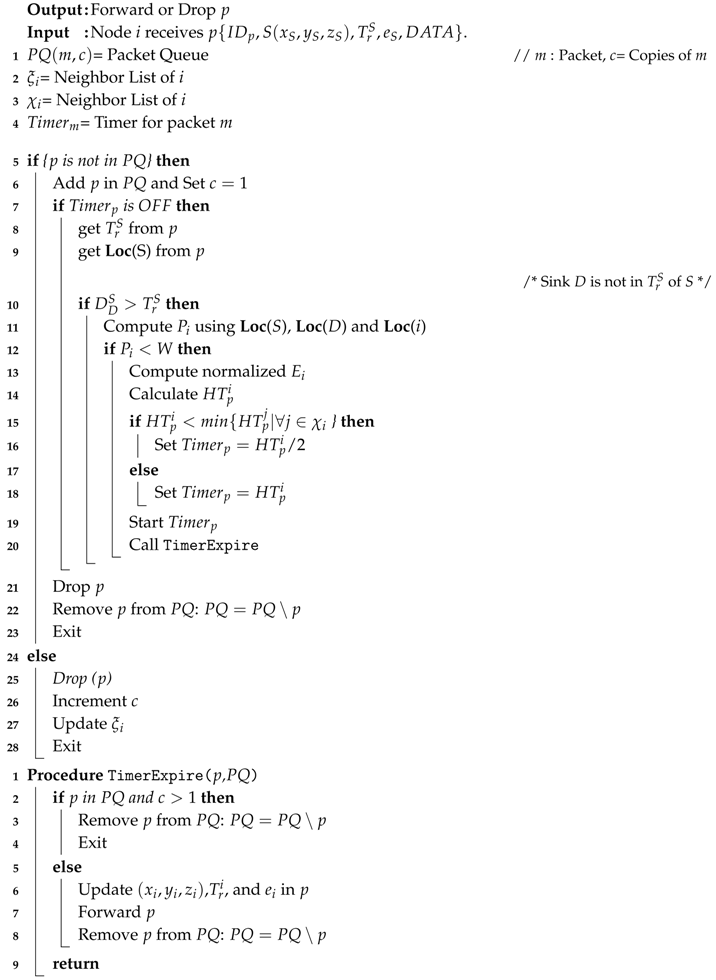 |
4. Simulation Analysis
4.1. Performance Metrics
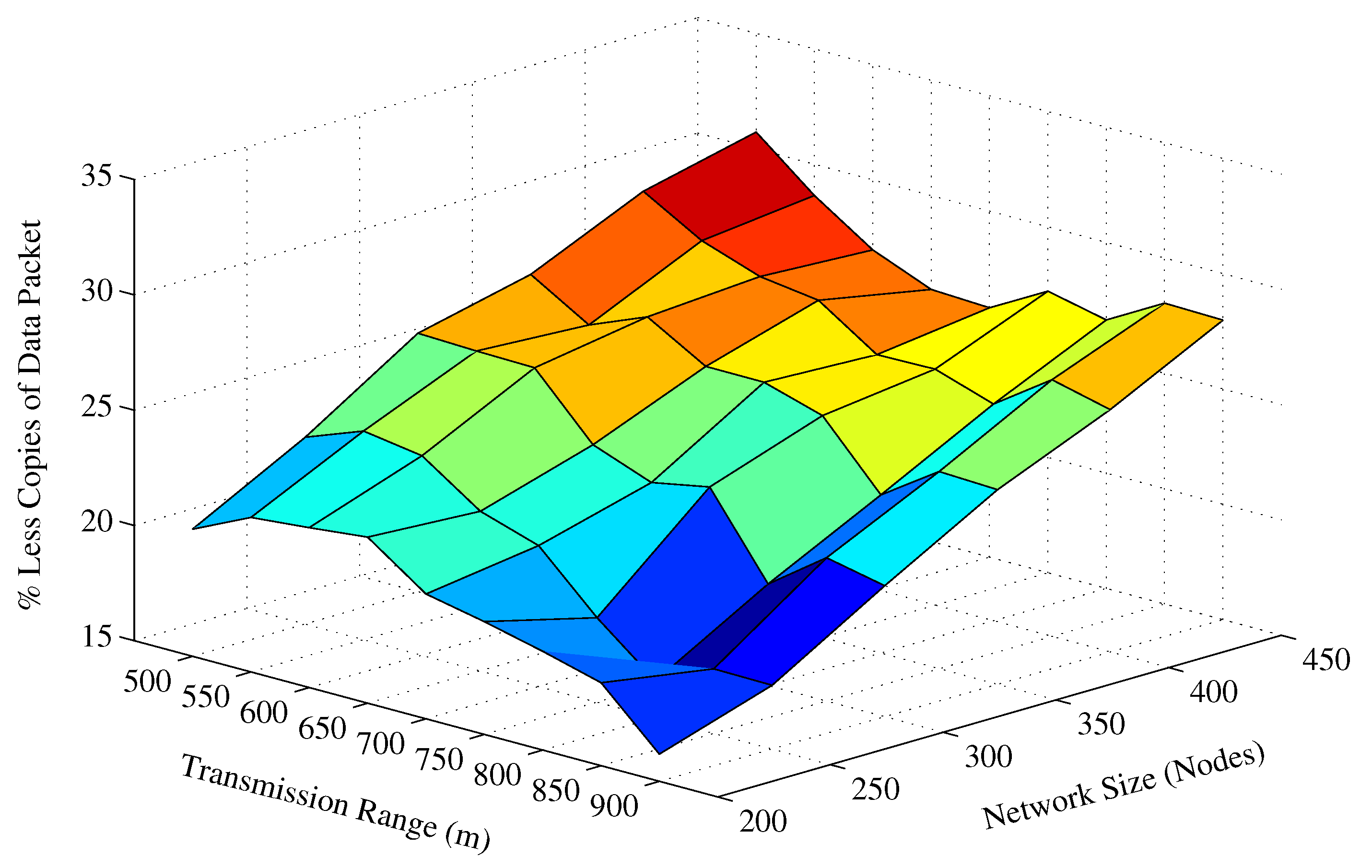
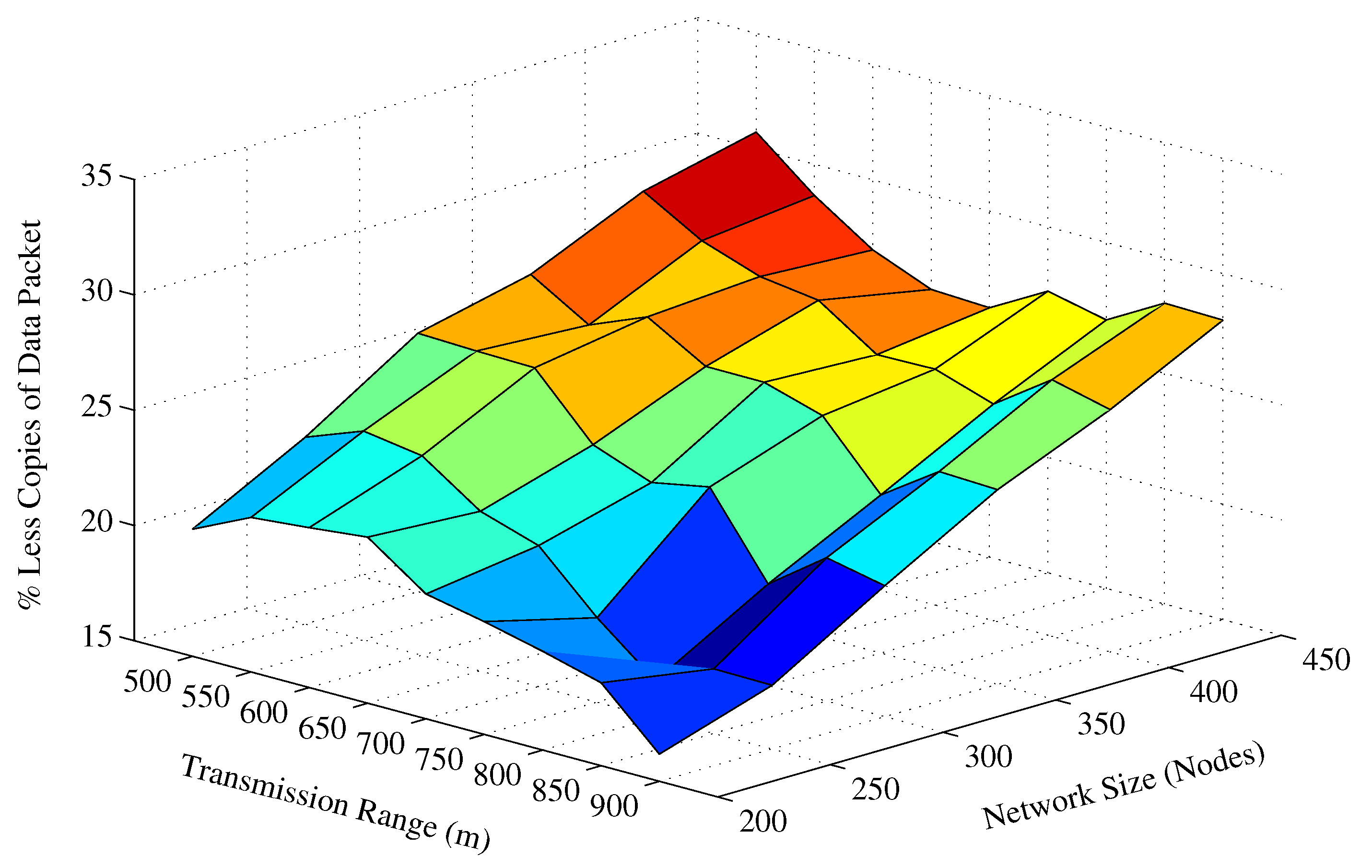
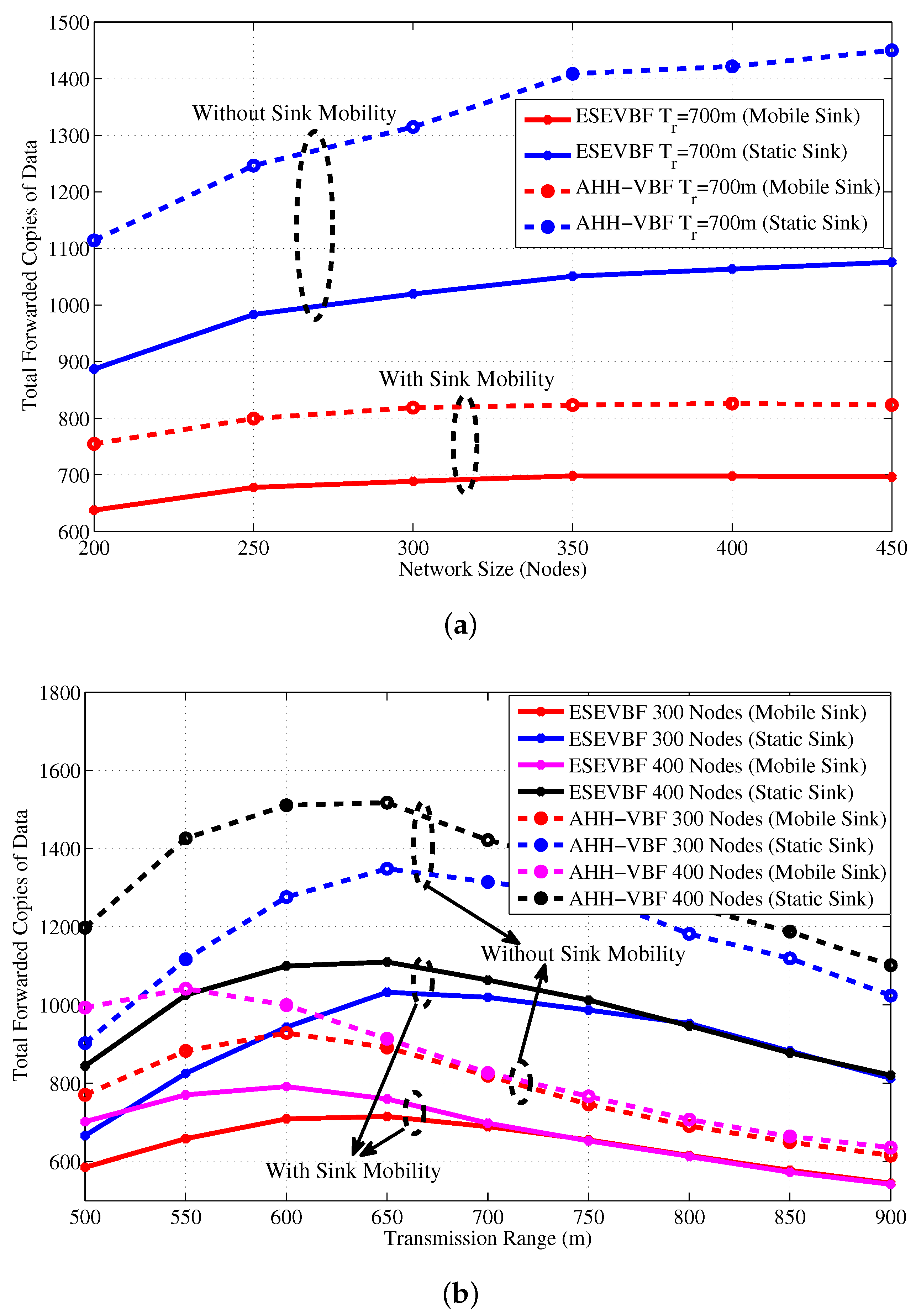
- Total forwarded copies of data: represents the number of copies forwarded in the network for all data packet transmissions initiated by the source nodes.
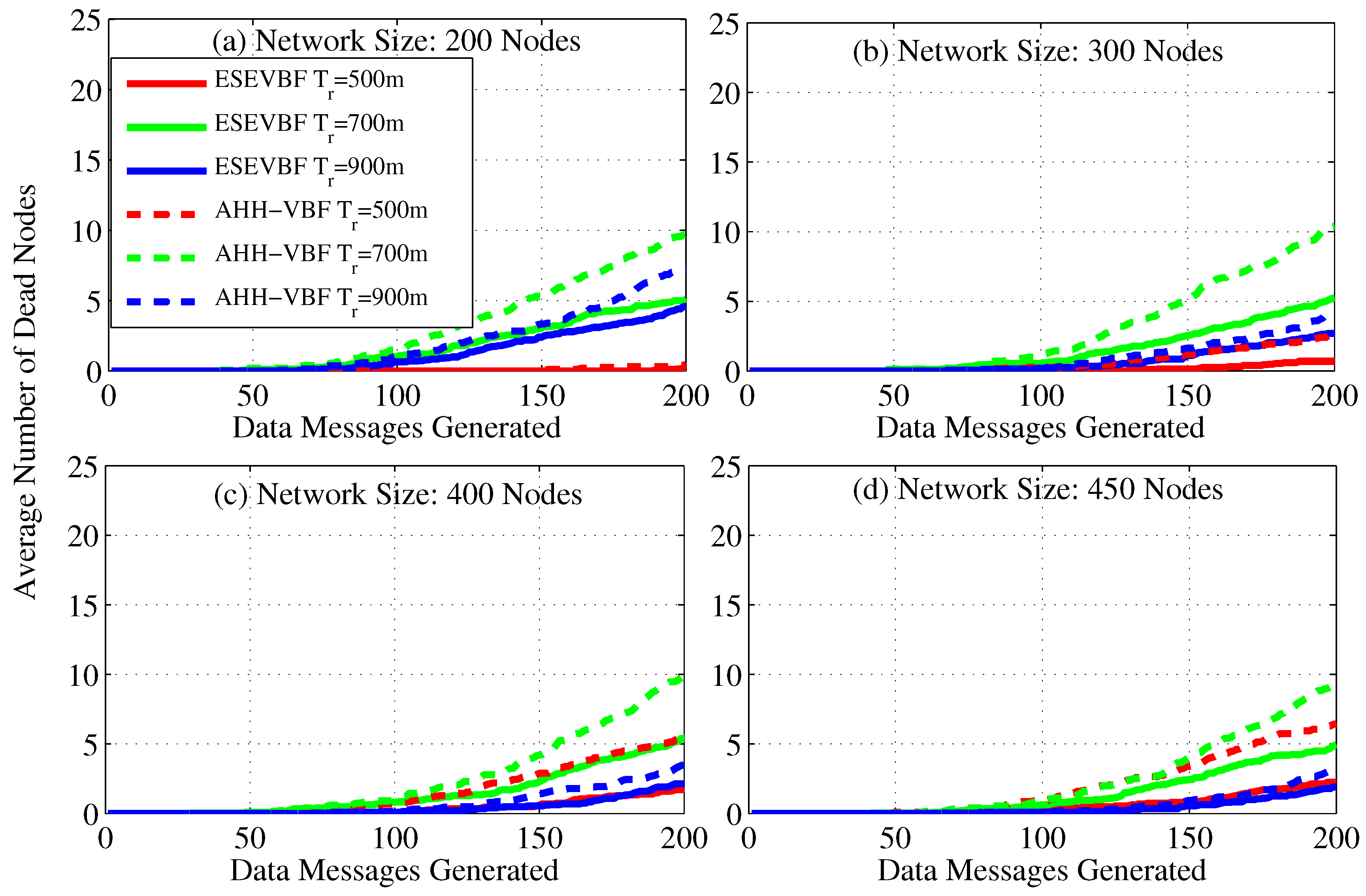
- Number of dead nodes: is the total number of nodes that could not participate in the data forwarding process because they have residual energy less than the transmission energy.
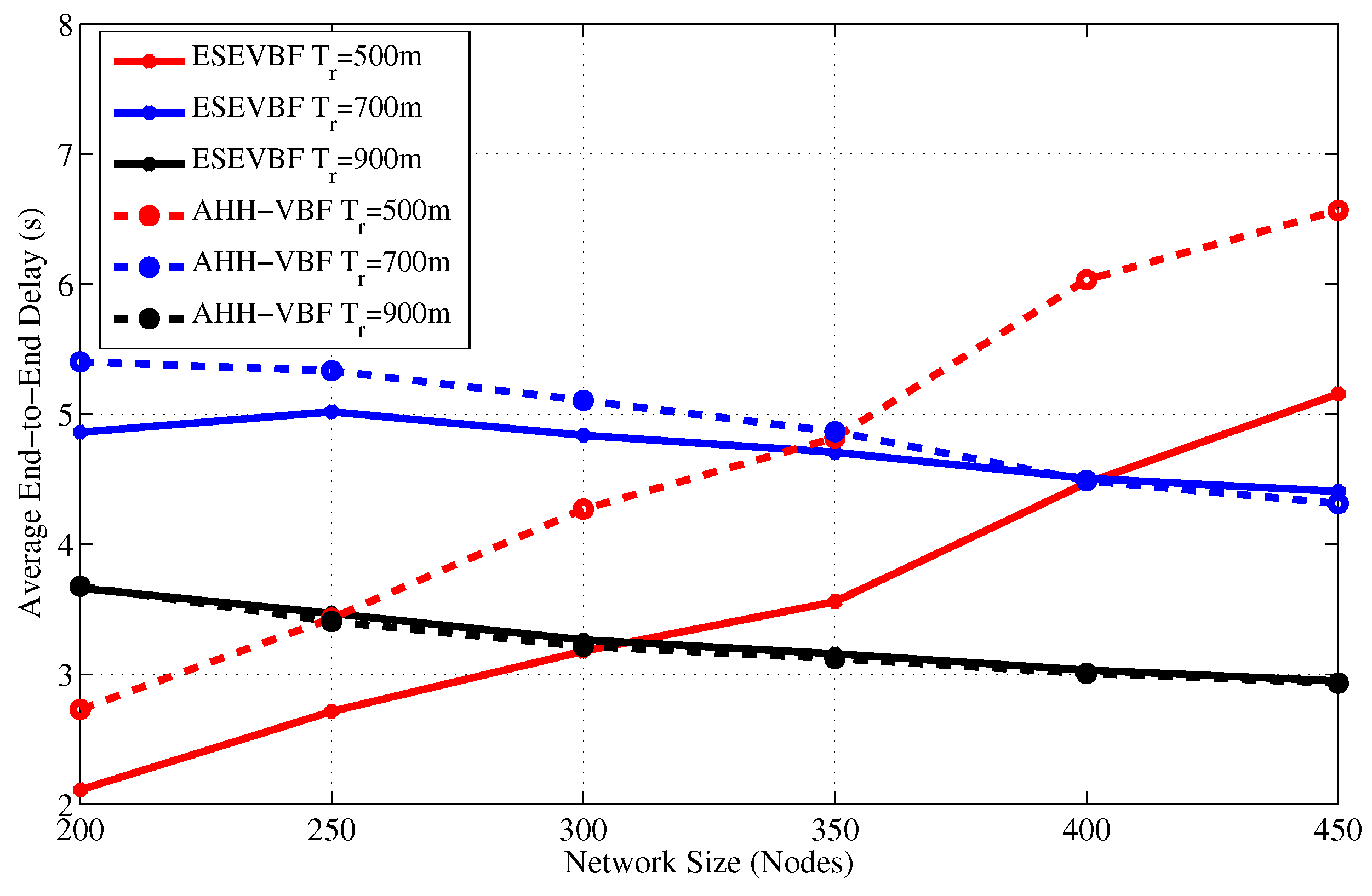
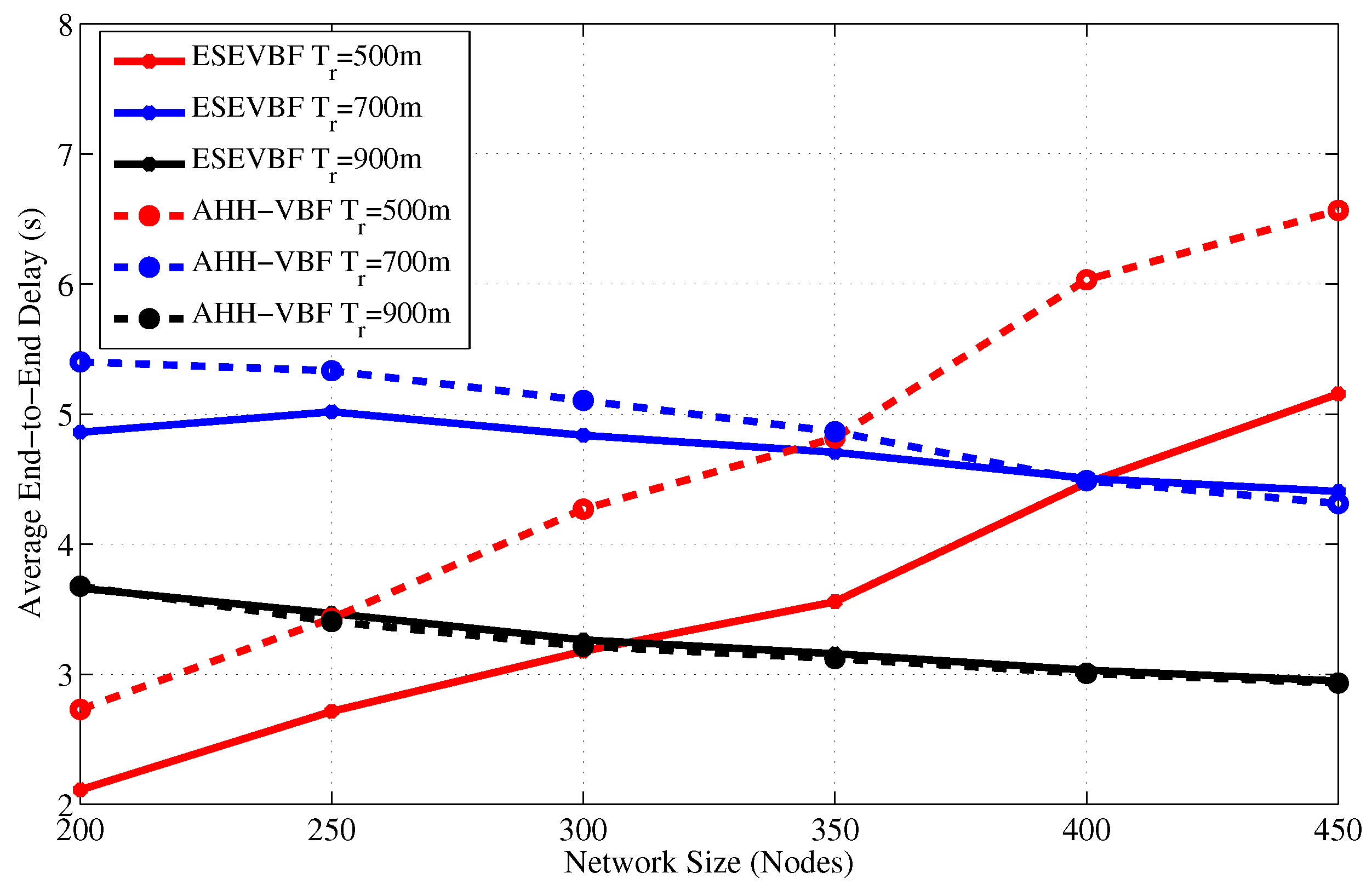
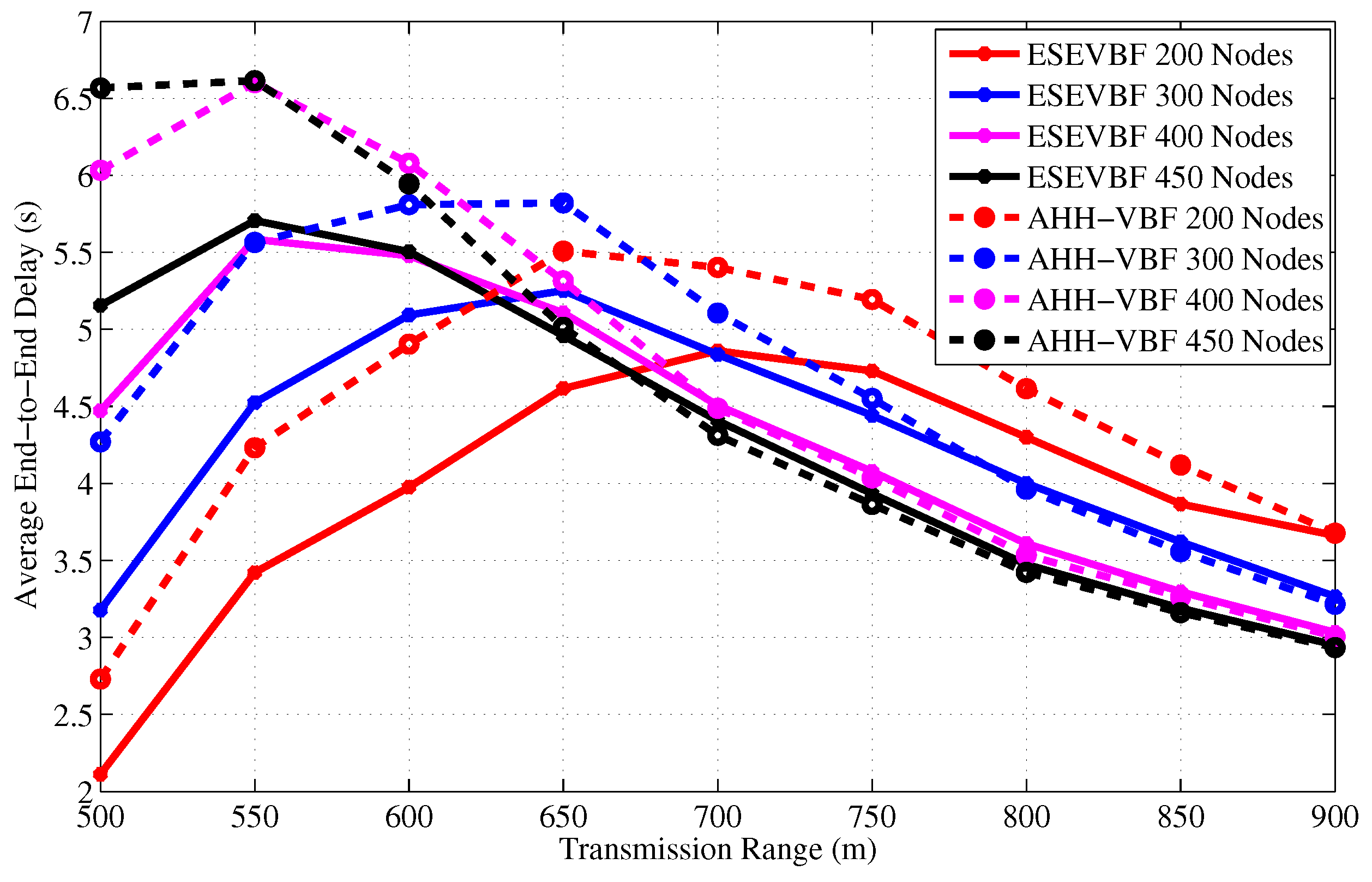
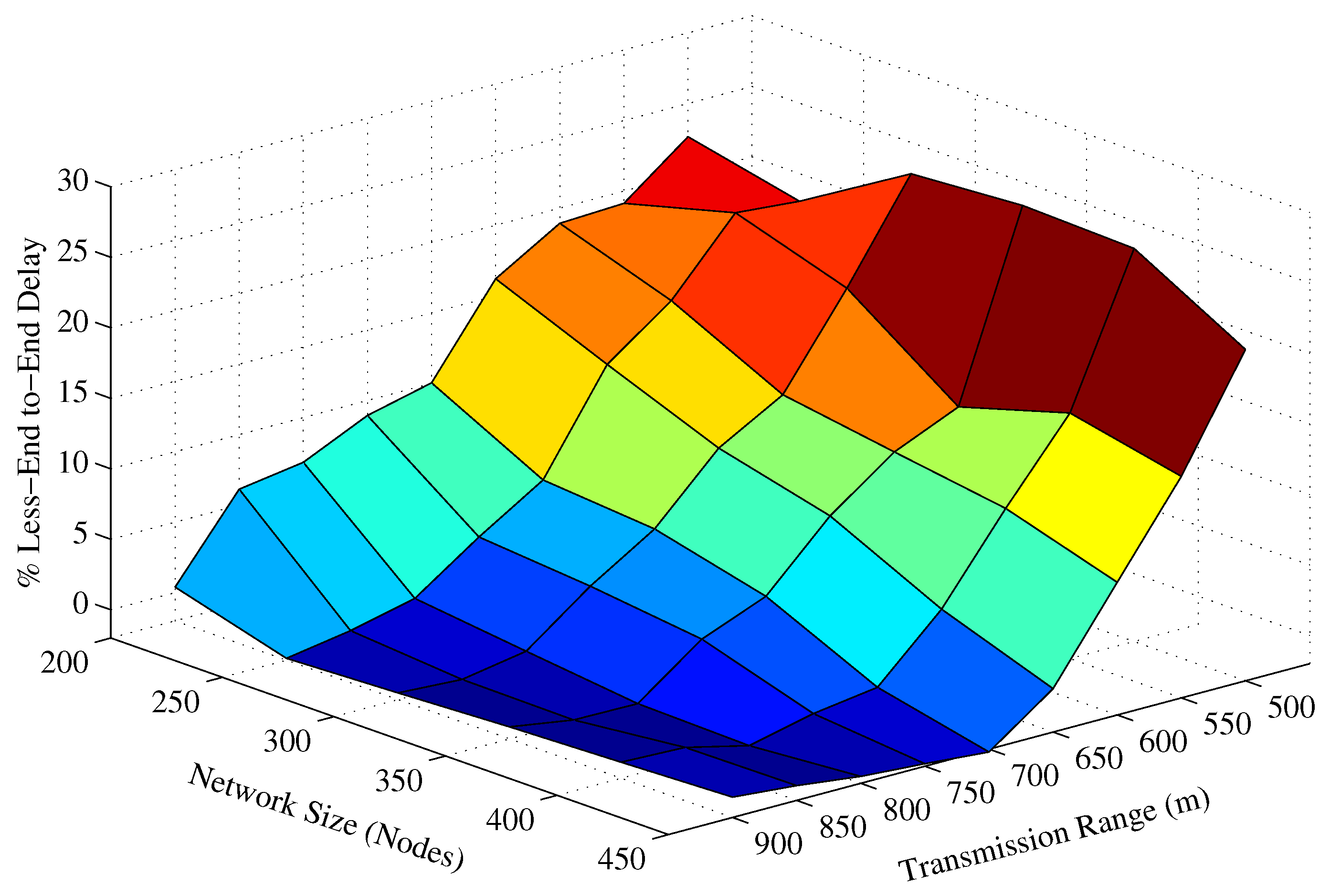
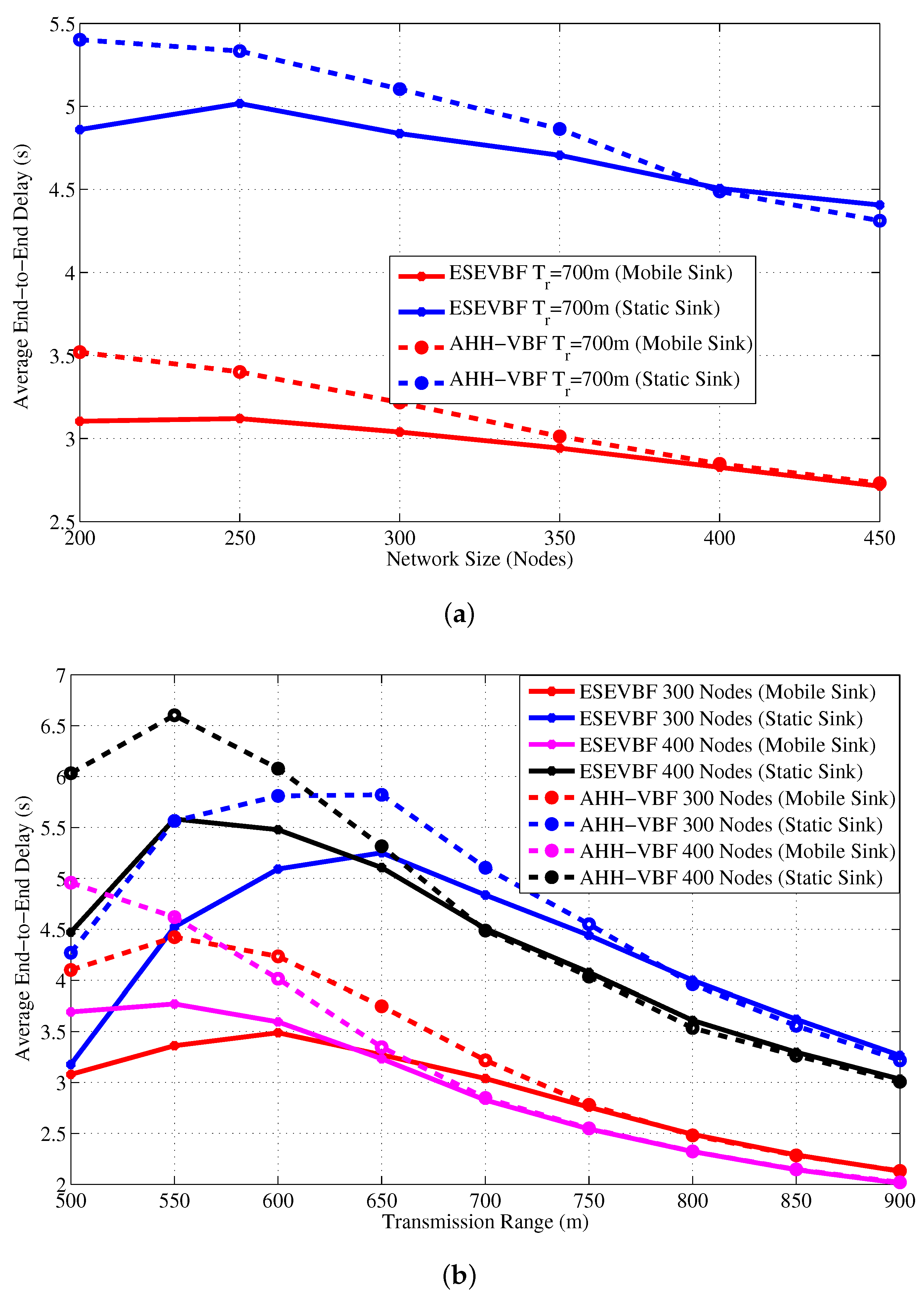
- End-to-end delay: is the cumulative delay experienced by the data packet between its source and the sink node.
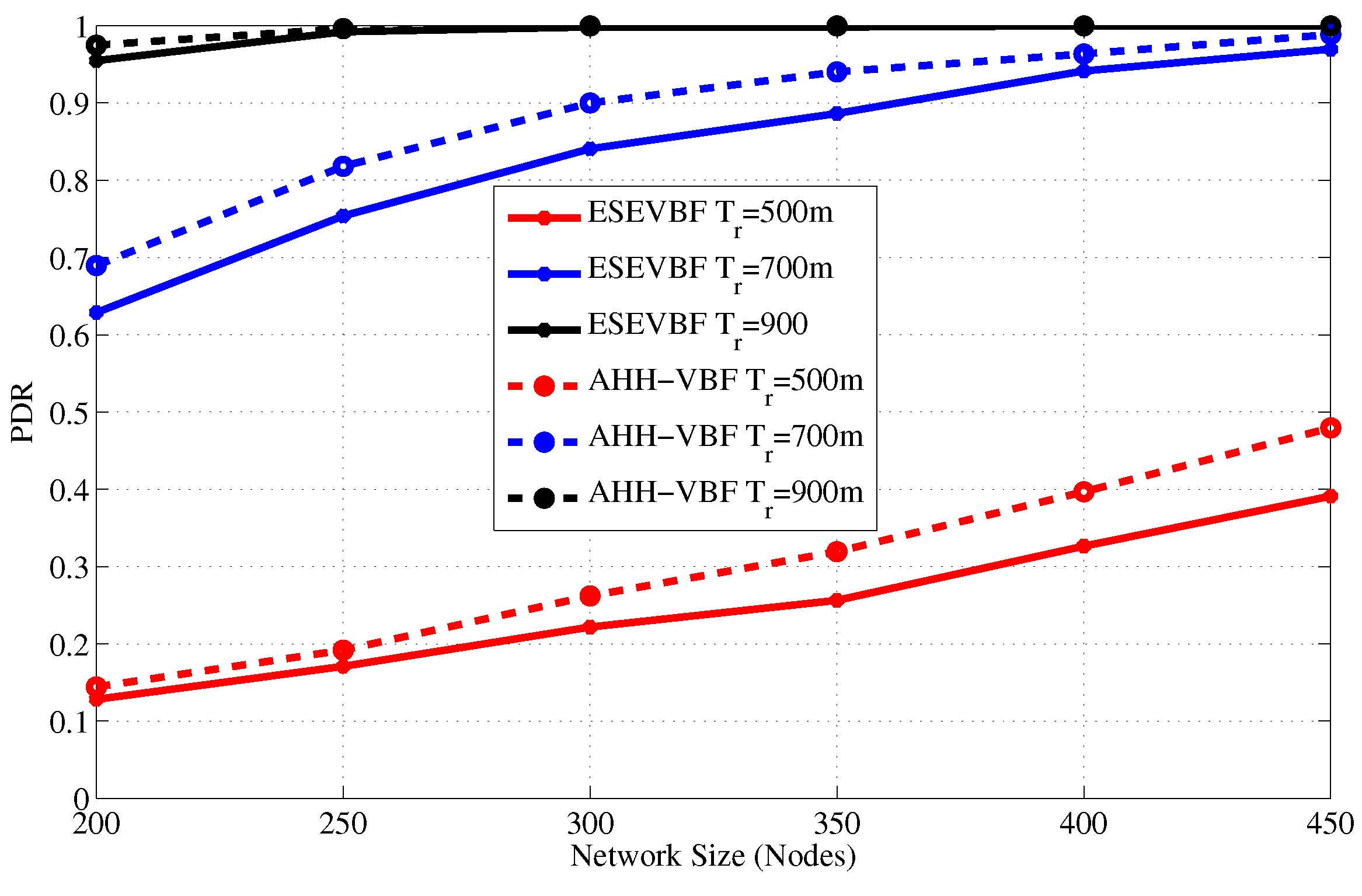
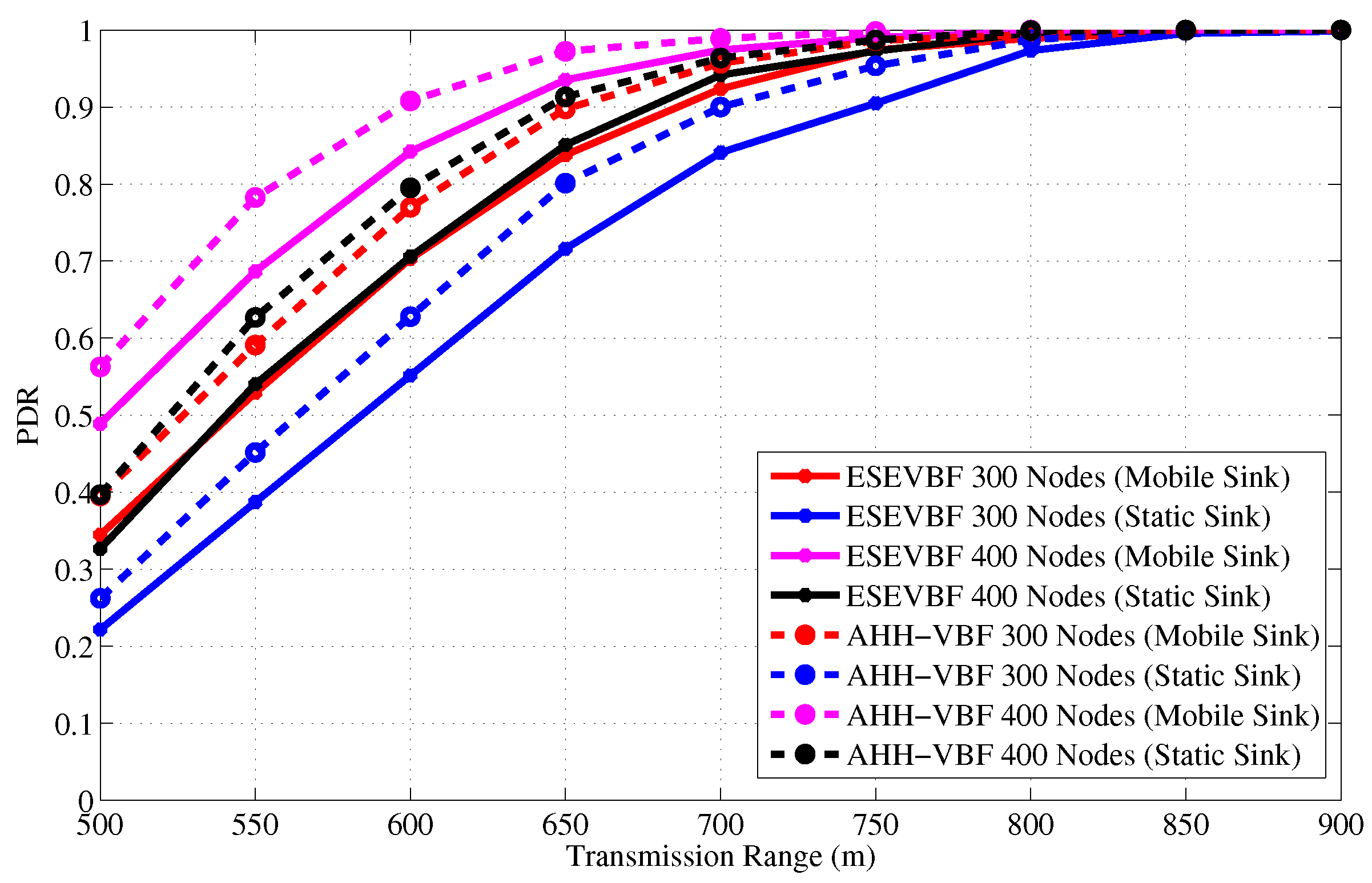
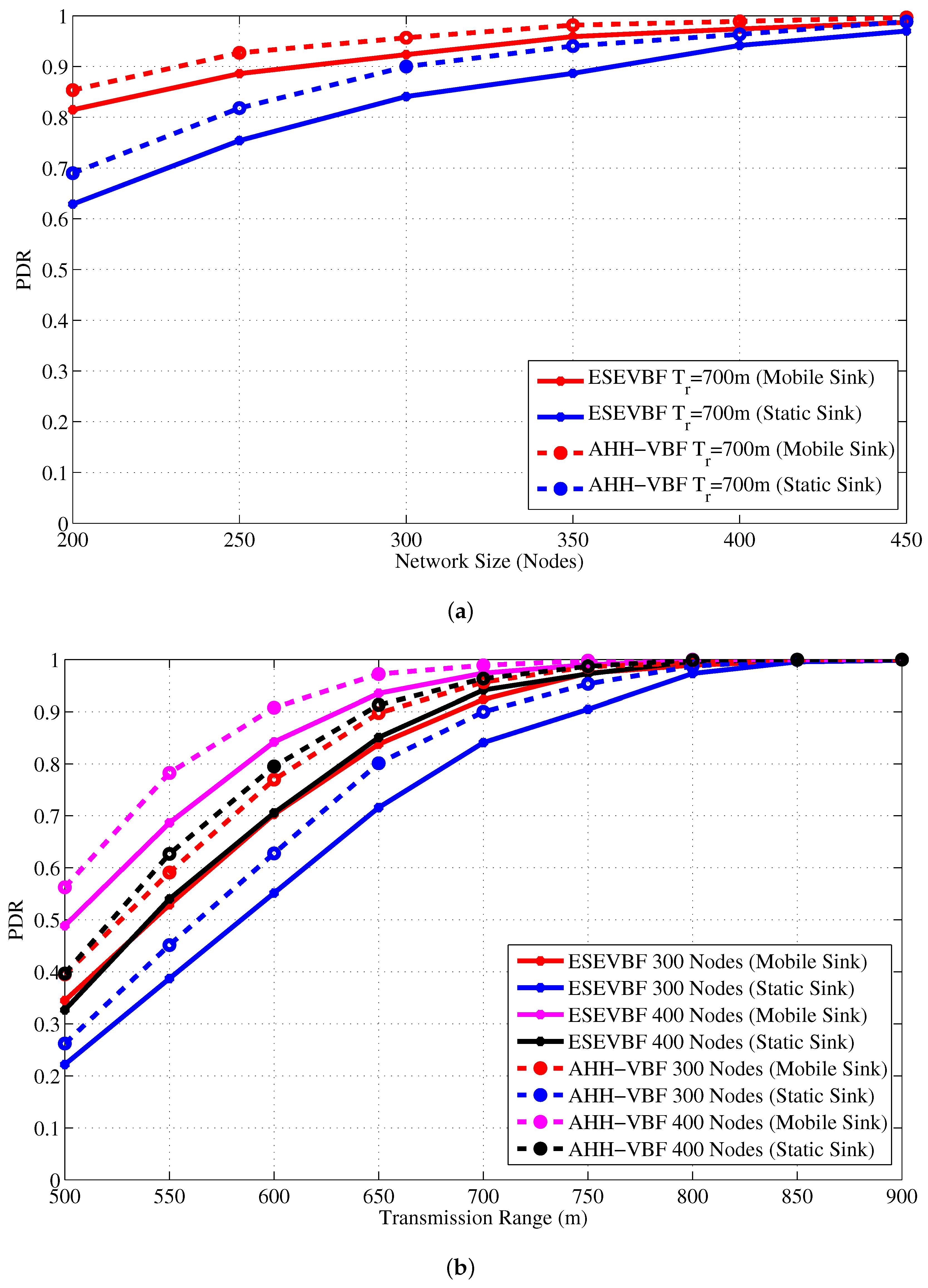
- PDR (Packet Delivery Ratio): is the ratio of successfully received data packets by sink over the total number of generated data packets.
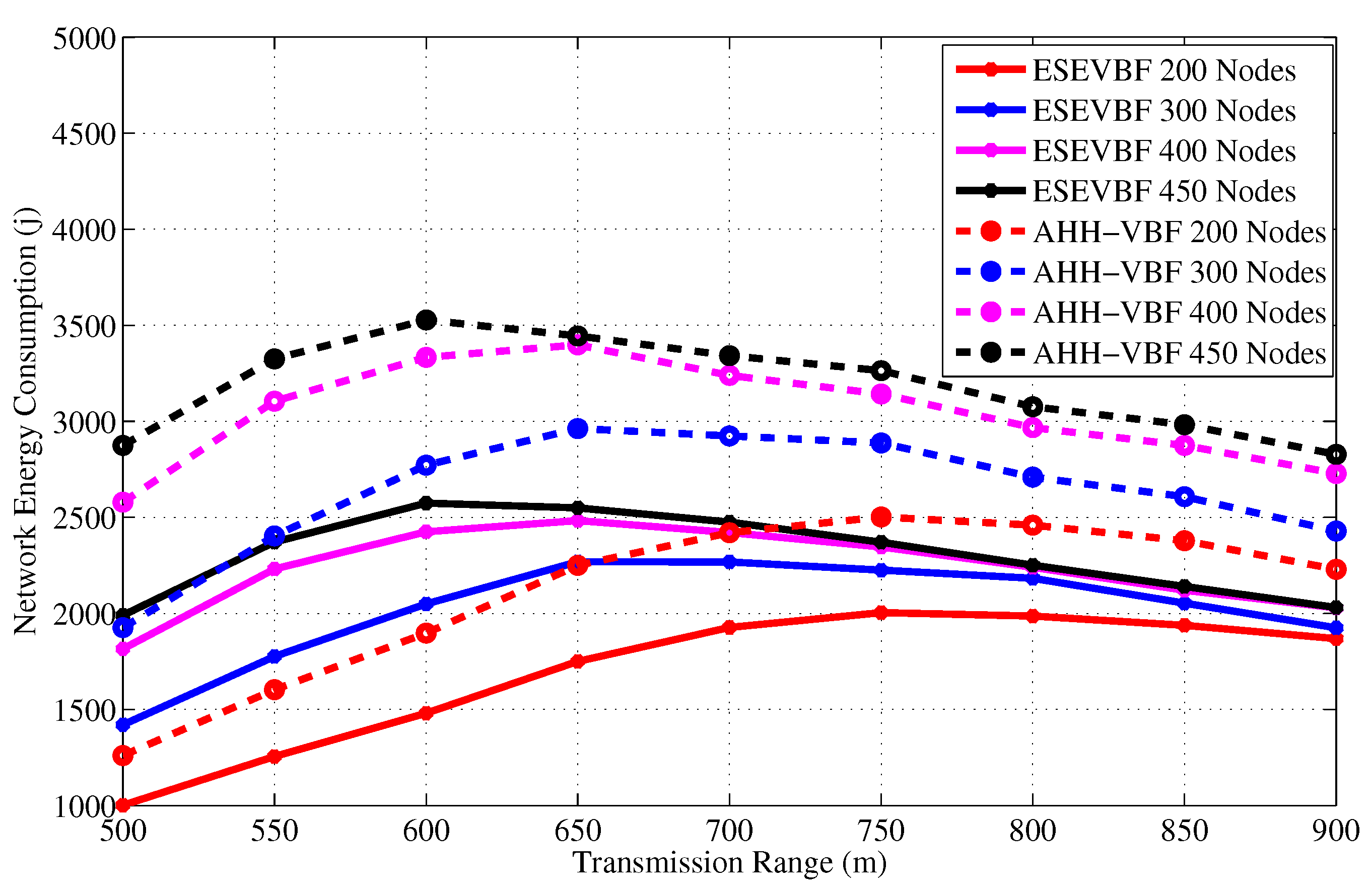
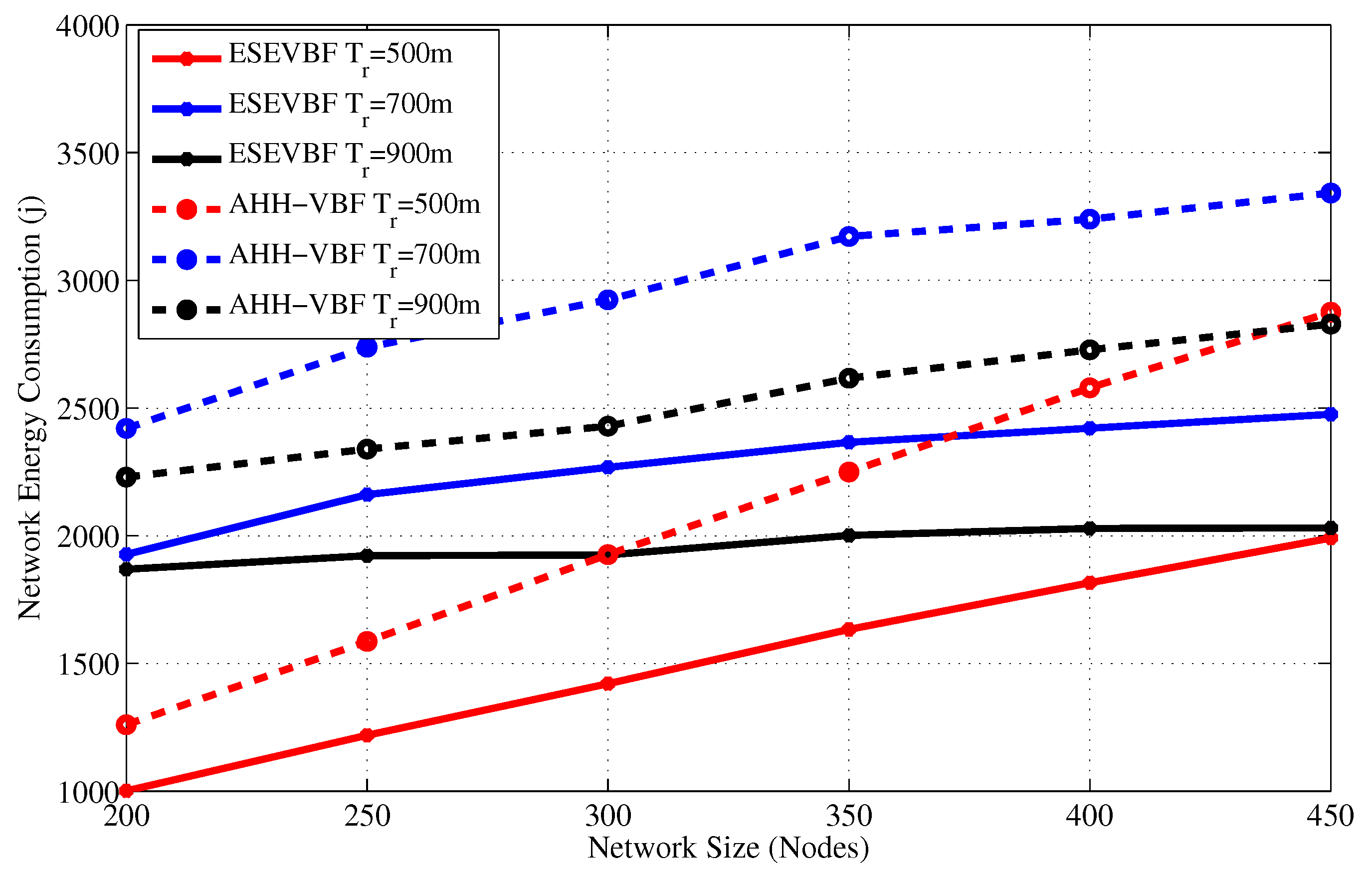
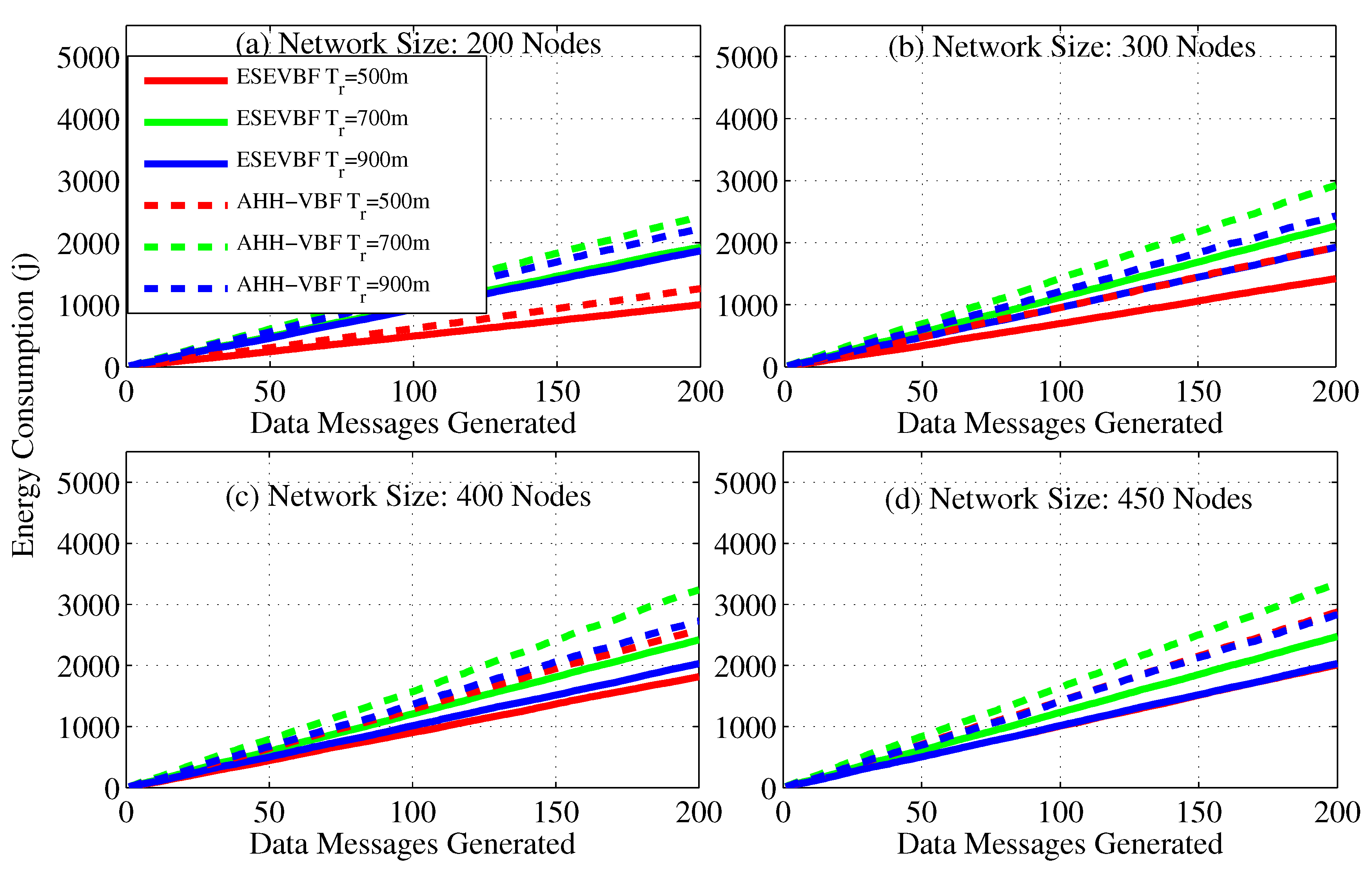
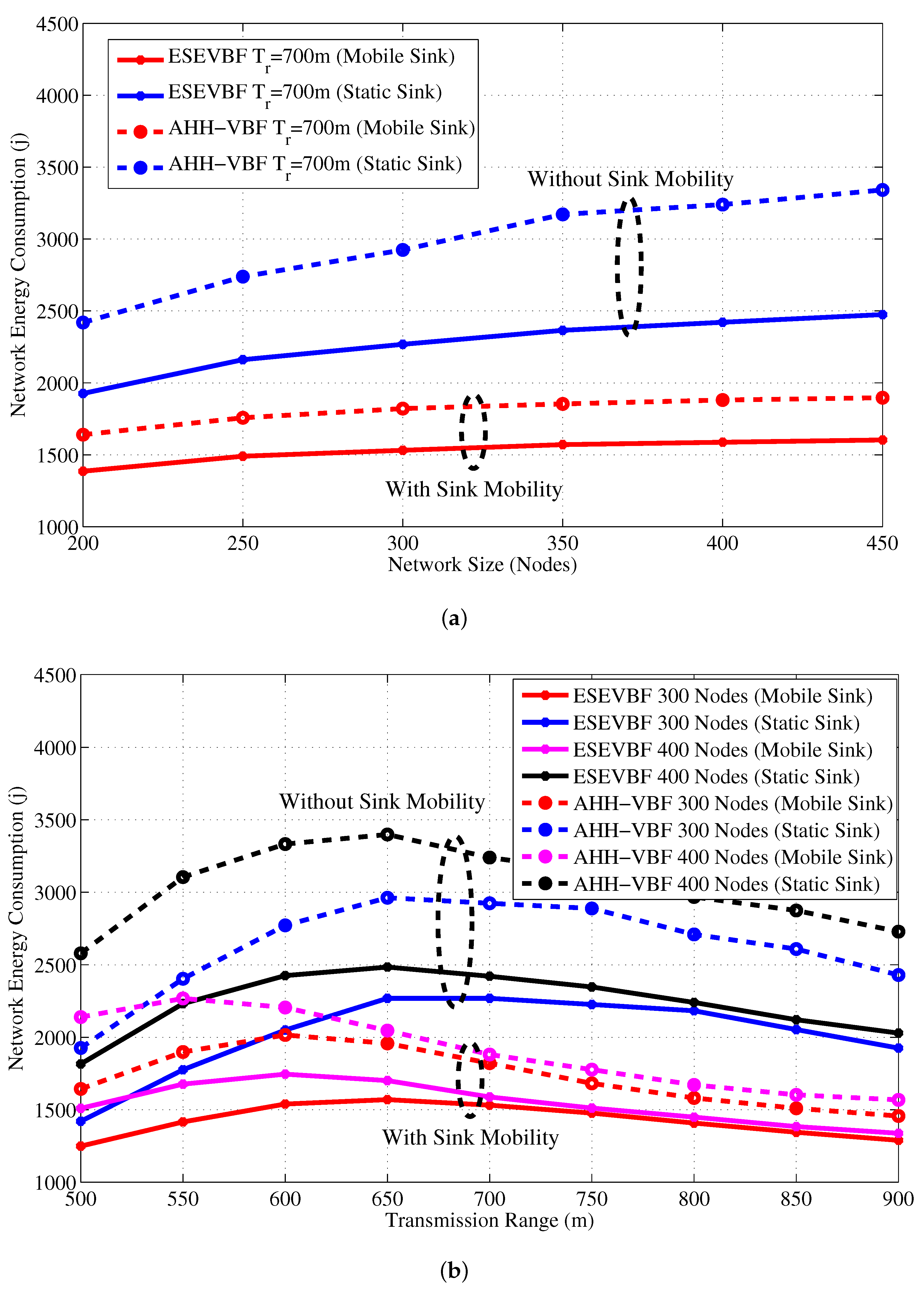
- Energy consumption: total energy consumption in the network during the whole simulation time.
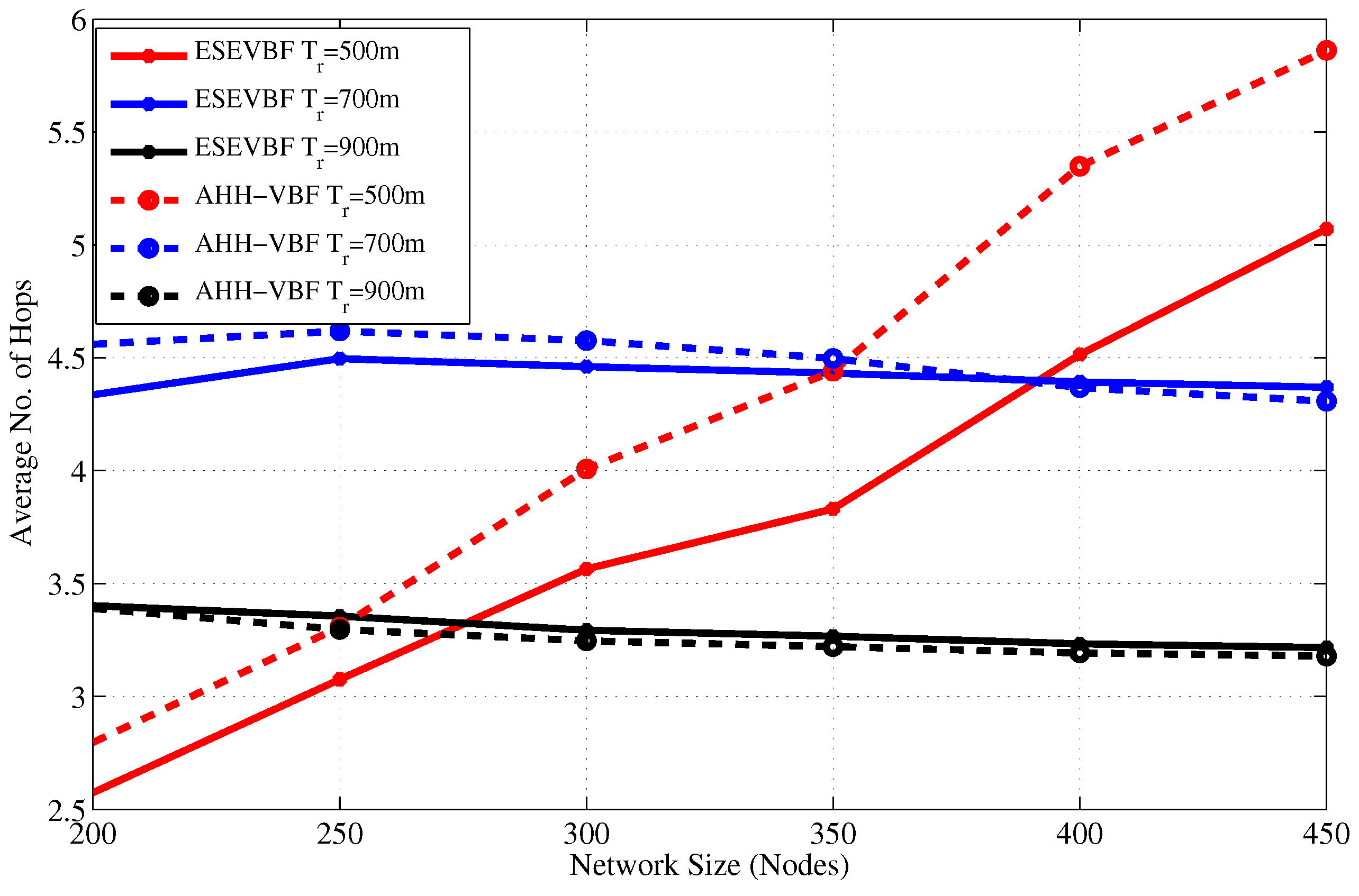
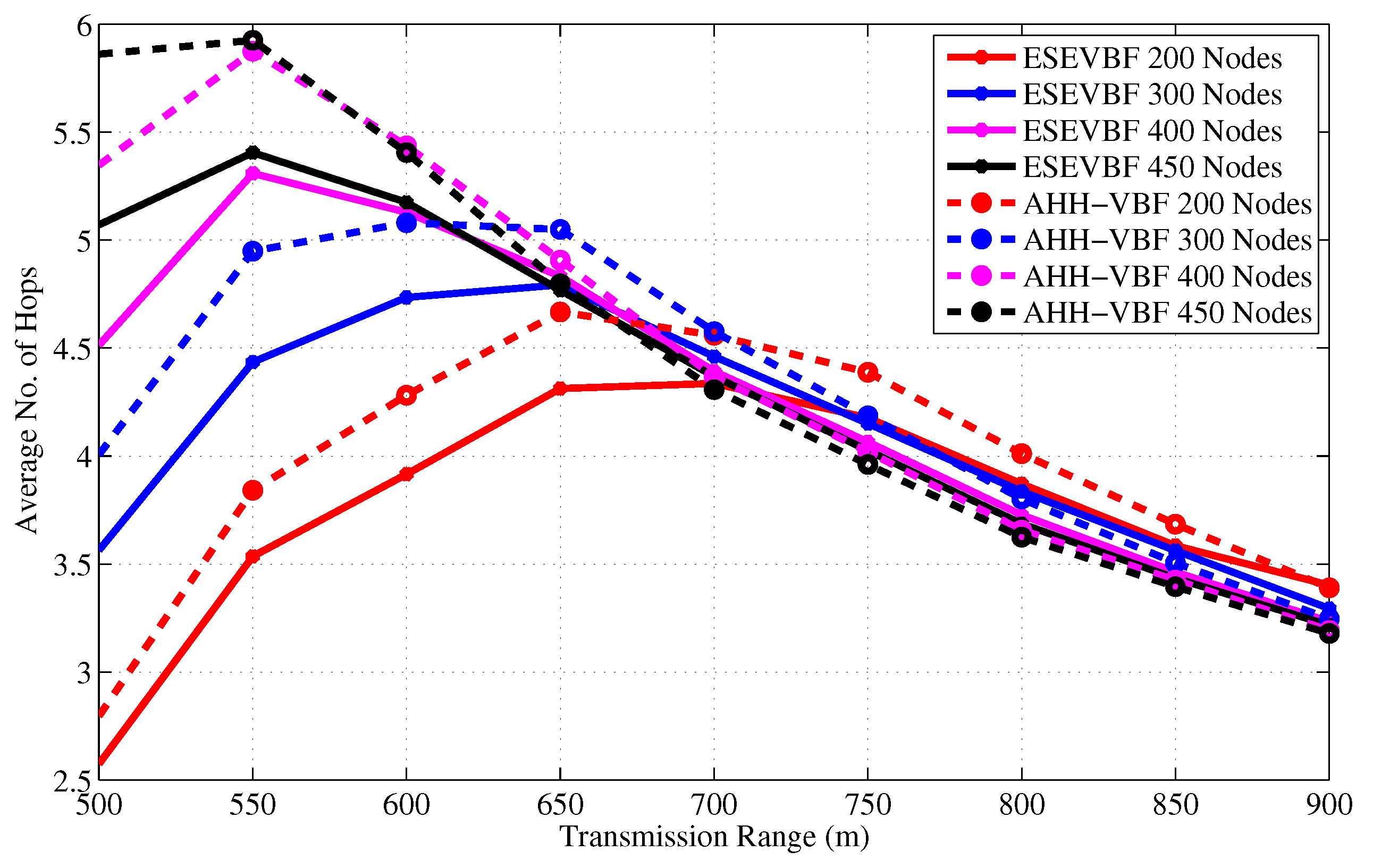
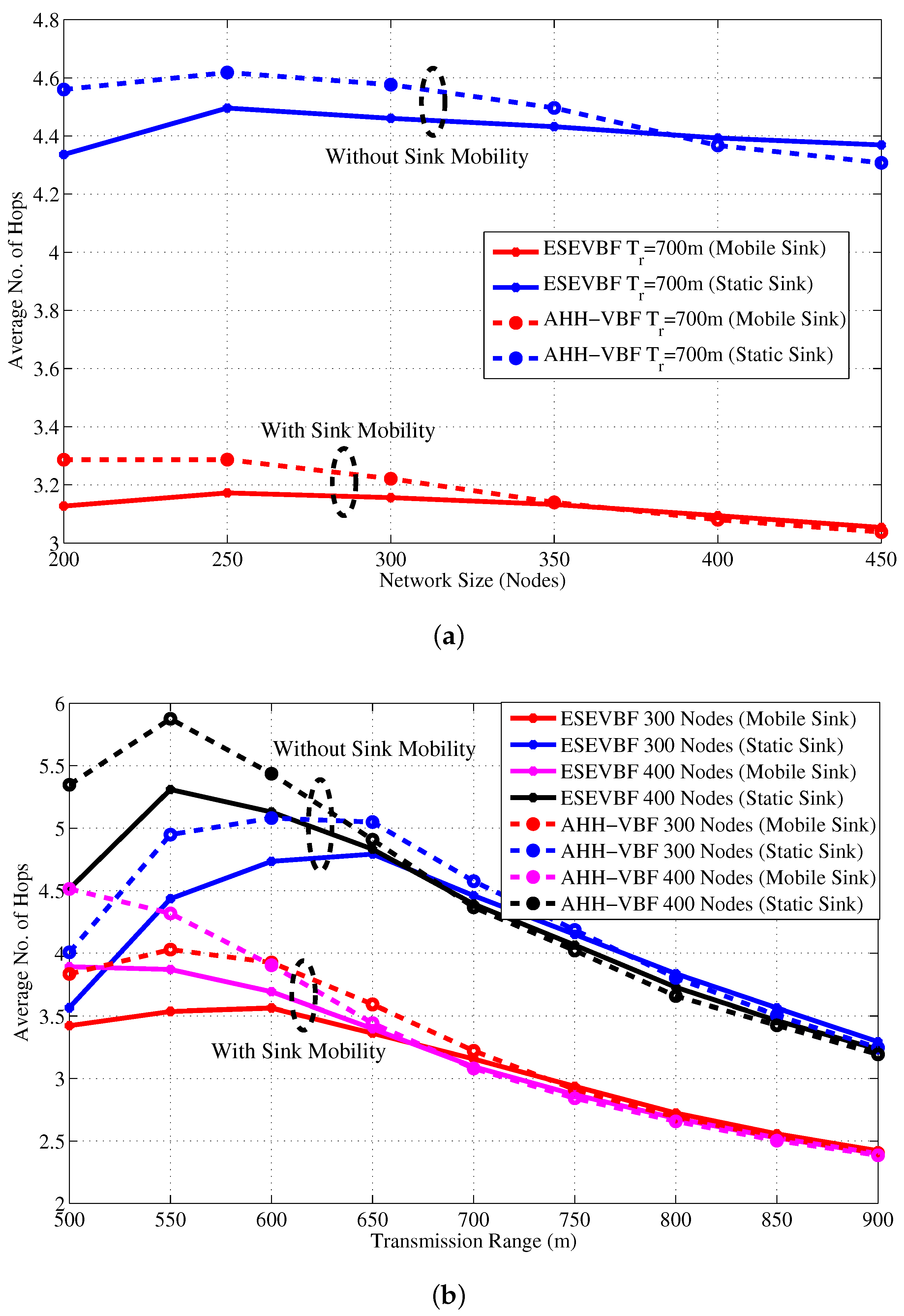
- Hop count: represents the average number of hops that the data packets have traversed between source and sink node.
4.2. Simulation Results in the Static Sink Scenario
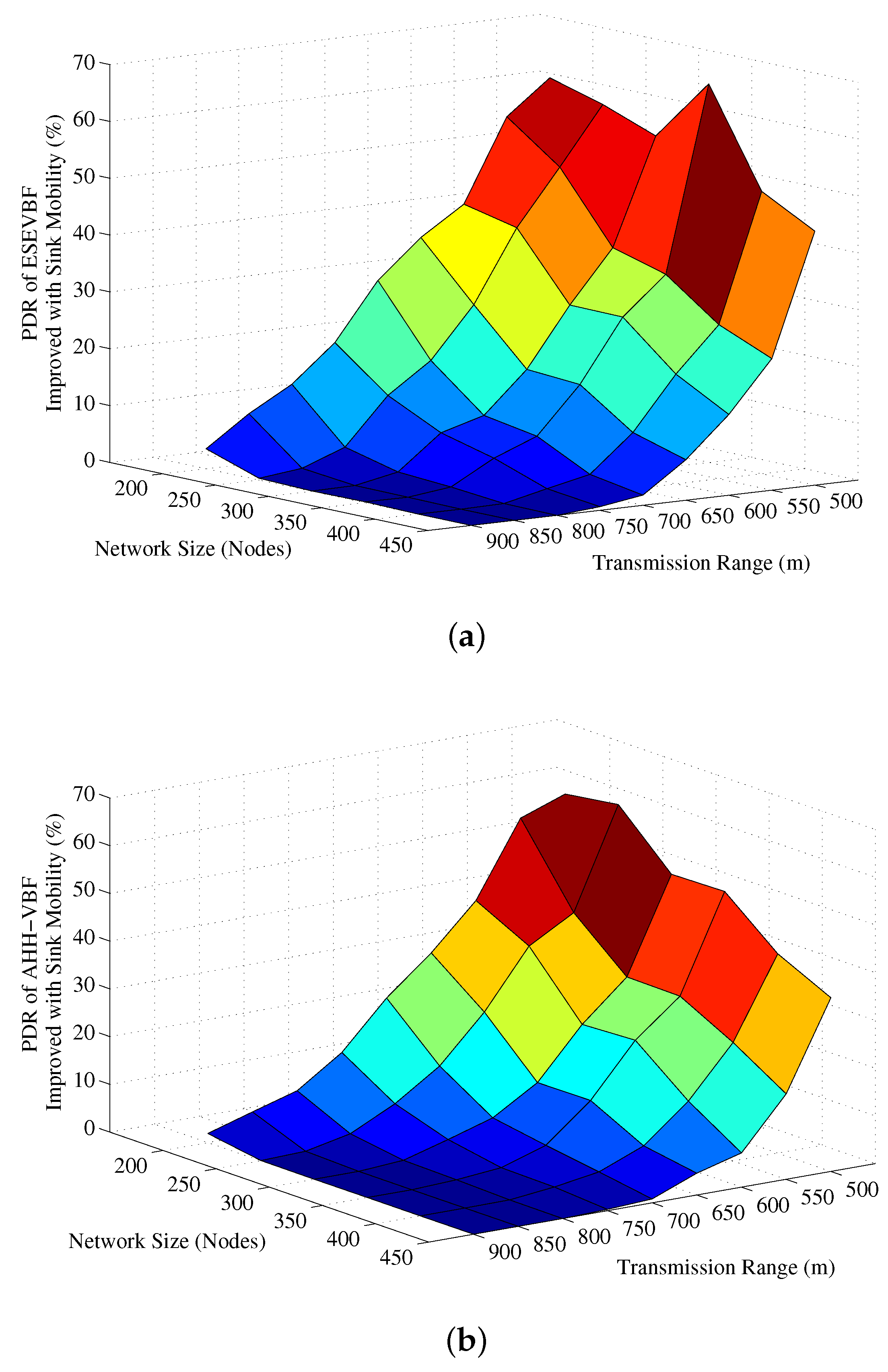
4.3. Simulation Results in the Mobile Sink Scenario
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Garcia, M.S.; Carvalho, D.; Zlydareva, O.; Muldoon, C.; Masterson, B.F.; O’Grady, M.J.; Meijer, W.G.; O’Sullivan, J.J.; O’Hare, G.M.P. An agent-based wireless sensor network for water quality data collection. In Proceedings of the International Conference on Ubiquitous Computing and Ambient Intelligence, Vitoria-Gasteiz, Spain, 3–5 December 2012; Springer: Berlin, Germany, 2012; pp. 454–461. [Google Scholar]
- Sozer, E.M.; Stojanovic, M.; Proakis, J.G. Underwater acoustic networks. IEEE J. Ocean. Eng. 2000, 25, 72–83. [Google Scholar] [CrossRef]
- Heidemann, J.; Ye, W.; Wills, J.; Syed, A.; Li, Y. Research challenges and applications for underwater sensor networking. In Proceedings of the 2006 WCNC IEEE Wireless Communications and Networking Conference, Las Vegas, NV, USA, 3–6 April 2006; pp. 228–235. [Google Scholar]
- Cella, U.M.; Johnstone, R.; Shuley, N. Electromagnetic wave wireless communication in shallow water coastal environment: Theoretical analysis and experimental results. In Proceedings of the Fourth ACM International Workshop on UnderWater Networks, Berkeley, CA, USA, 4–6 November 2009. [Google Scholar]
- Che, X.; Wells, I.; Dickers, G.; Kear, P.; Gong, X. Re-evaluation of RF electromagnetic communication in underwater sensor networks. IEEE Commun. Mag. 2010, 48, 143–151. [Google Scholar] [CrossRef]
- Hanson, F.; Radic, S. High bandwidth underwater optical communication. Appl. Opt. 2008, 47, 277–283. [Google Scholar] [CrossRef] [PubMed]
- Kaushal, H.; Kaddoum, G. Underwater Optical Wireless Communication. IEEE Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Casari, P.; Stojanovic, M.; Zorzi, M. Exploiting the Bandwidth-Distance Relationship in Underwater Acoustic Networks. In Proceedings of the 2007 OCEANS, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–6. [Google Scholar]
- Walker, D. Micro Autonomous Underwater Vehicle Concept for Distributed Data Collection. In Proceedings of the IEEE Oceans, Boston, MA, USA, 18–21 September 2006; pp. 1–4. [Google Scholar]
- Han, G.; Jiang, J.; Bao, N.; Wan, L.; Guizani, M. Routing protocols for underwater wireless sensor networks. IEEE Commun. Mag. 2015, 53, 72–78. [Google Scholar] [CrossRef]
- Li, N.; Martínez, J.; Chaus, J.M.M.; Eckert, M. A Survey on Underwater Acoustic Sensor Network Routing Protocols. Sensors 2016, 16, 414. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ghoreyshi, S.M.; Shahrabi, A.; Boutaleb, T. Void-Handling Techniques for Routing Protocols in Underwater Sensor Networks: Survey and Challenges. IEEE Commun. Surv. Tutor. 2017, 19, 800–827. [Google Scholar] [CrossRef]
- Garcia, J.E. Accurate positioning for underwater acoustic networks. In Proceedings of the 2005 Europe OCEANS, Brest, France, 20–23 June 2005; Volume 1, pp. 328–333. [Google Scholar]
- Yan, H.; Shi, Z.J.; Cui, J. DBR: Depth-Based routing for underwater sensor networks. In Proceedings of the 7th International IFIP-TC6 Networking Conference on AdHoc and Sensor Networks, Wireless Networks, Next Generation Internet (NETWORKING’08), Singapore, 5–9 May 2008; Springer: Berlin, Germany, 2008; pp. 72–86. [Google Scholar]
- Xie, P.; Cui, J.; Lao, L. VBF: Vector-Based forwarding protocol for underwater sensor networks. In Proceedings of the 5th international IFIP-TC6 conference on Networking Technologies, Services, and Protocols; Performance of Computer and Communication Networks; Mobile and Wireless Communications Systems (NETWORKING’06), Coimbra, Portugal, 15–19 May 2006; Springer: Berlin, Germany, 2006; pp. 1216–1221. [Google Scholar]
- Nicolaou, N.; See, A.; Xie, P.; Cui, J.H.; Maggiorini, D. Improving the Robustness of Location-Based Routing for Underwater Sensor Networks. In Proceedings of the Europe OCEANS 2007, Aberdeen, UK, 18–21 June 2007; pp. 1–6. [Google Scholar]
- Yu, H.; Yao, N.; Liu, J. An adaptive routing protocol in underwater sparse acoustic sensor networks. Ad Hoc Netw. 2015, 34, 121–143. [Google Scholar] [CrossRef]
- Javaid, N.; Hafeez, T.; Wadud, Z.; Alrajeh, N.; Alabed, M.S.; Guizani, N. Establishing a Cooperation-Based and Void Node Avoiding Energy-Efficient Underwater WSN for a Cloud. IEEE Access 2017, 5, 11582–11593. [Google Scholar] [CrossRef]
- Ahmed, F.; Gul, S.; Khalil, M.A.; Sher, A.; Khan, Z.A.; Qasim, U.; Javed, N. Two Hop Adaptive Routing Protocol for Underwater Wireless Sensor Networks. In Proceedings of the Innovative Mobile and Internet Services in Ubiquitous Computing, Torino, Italy, 10–12 July 2017; Springer: Cham, Switzerland, 2017; pp. 181–189. [Google Scholar]
- Javaid, N.; Ahmed, F.; Wadud, Z.; Alrajeh, N.; Alabed, M.S.; Ilahi, M. Two Hop Adaptive Vector Based Quality Forwarding for Void Hole Avoidance in Underwater WSNs. Sensors 2017, 17, 1762. [Google Scholar] [CrossRef] [PubMed]
- Jornet, J.M.; Stojanovic, M.; Zorzi, M. Focused beam routing protocol for underwater acoustic networks. In Proceedings of the Third ACM International Workshop on Underwater Networks (WuWNeT ’08), San Francisco, CA, USA, 15 September 2008; ACM: New York, NY, USA, 2008; pp. 75–82. [Google Scholar]
- Ali, T.; Jung, L.T.; Ameer, S. Flooding control by using Angle Based Cone for UWSNs. In Proceedings of the 2012 International Symposium on Telecommunication Technologies, Kuala Lumpur, Malaysia, 26–28 November 2012; pp. 112–117. [Google Scholar]
- Hwang, D.; Kim, D. DFR: Directional flooding-based routing protocol for underwater sensor networks. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–7. [Google Scholar]
- Khan, J.U.; Cho, H. A Distributed Data-Gathering Protocol Using AUV in Underwater Sensor Networks. Sensors 2015, 15, 19331–19350. [Google Scholar] [CrossRef] [PubMed]
- Yoon; Seokhoon; Azad, A.K.; Oh, H.; Kim, S. AURP: An AUV-aided underwater routing protocol for underwater acoustic sensor networks. Sensors 2012, 12, 1827–1845. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.S.; Lin, Y.W. Mobicast Routing Protocol for Underwater Sensor Networks. IEEE Sens. J. 2013, 13, 737–749. [Google Scholar] [CrossRef]
- Raza; Waseem; Arshad, F.; Ahmed, I.; Abdul, W.; Ghouzali, S.; Niaz, I.A.; Javaid, N. An improved forwarding of diverse events with mobile sinks in underwater wireless sensor networks. Sensors 2016, 16, 1850. [Google Scholar] [CrossRef] [PubMed]
- Zheng, H.; Wang, N.; Wu, J. Minimizing deep sea data collection delay with autonomous underwater vehicles. J. Parallel Distrib. Comput. 2017, 104, 99–113. [Google Scholar] [CrossRef]
- Ghoreyshi, S.M.; Shahrabi, A.; Boutaleb, T. An Underwater Routing Protocol with Void Detection and Bypassing Capability. In Proceedings of the 2017 IEEE 31st International Conference on Advanced Information Networking and Applications (AINA), Taipei, Taiwan, 27–29 March 2017; pp. 530–537. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Size | 200 | 250 | 300 | 350 | 400 | 450 |
|---|---|---|---|---|---|---|
| m | 20.6 | 23.1 | 26.3 | 27.4 | 29.6 | 30.8 |
| 550 m | 21.7 | 24.1 | 26.1 | 25.9 | 28.1 | 28.7 |
| 600 m | 21.9 | 23.6 | 26.0 | 26.9 | 27.2 | 27.0 |
| 650 m | 22.2 | 21.9 | 23.4 | 25.4 | 26.9 | 26.0 |
| 700 m | 20.4 | 21.1 | 22.4 | 25.4 | 25.3 | 25.9 |
| 750 m | 19.9 | 18.7 | 22.9 | 24.7 | 25.3 | 27.4 |
| 800 m | 19.3 | 16.6 | 19.5 | 21.9 | 24.5 | 26.8 |
| 850 m | 18.6 | 17.9 | 21.3 | 23.6 | 26.2 | 28.2 |
| 900 m | 16.2 | 17.8 | 20.8 | 23.5 | 25.6 | 28.2 |
| Energy Saved | 20.1% | 20.5% | 23.2% | 25.0% | 26.5% | 27.7% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wadud, Z.; Hussain, S.; Javaid, N.; Bouk, S.H.; Alrajeh, N.; Alabed, M.S.; Guizani, N. An Energy Scaled and Expanded Vector-Based Forwarding Scheme for Industrial Underwater Acoustic Sensor Networks with Sink Mobility. Sensors 2017, 17, 2251. https://doi.org/10.3390/s17102251
Wadud Z, Hussain S, Javaid N, Bouk SH, Alrajeh N, Alabed MS, Guizani N. An Energy Scaled and Expanded Vector-Based Forwarding Scheme for Industrial Underwater Acoustic Sensor Networks with Sink Mobility. Sensors. 2017; 17(10):2251. https://doi.org/10.3390/s17102251
Chicago/Turabian StyleWadud, Zahid, Sajjad Hussain, Nadeem Javaid, Safdar Hussain Bouk, Nabil Alrajeh, Mohamad Souheil Alabed, and Nadra Guizani. 2017. "An Energy Scaled and Expanded Vector-Based Forwarding Scheme for Industrial Underwater Acoustic Sensor Networks with Sink Mobility" Sensors 17, no. 10: 2251. https://doi.org/10.3390/s17102251