High-Accuracy Decoupling Estimation of the Systematic Coordinate Errors of an INS and Intensified High Dynamic Star Tracker Based on the Constrained Least Squares Method

Abstract
:1. Introduction
2. Unified Principle of Reference Frame
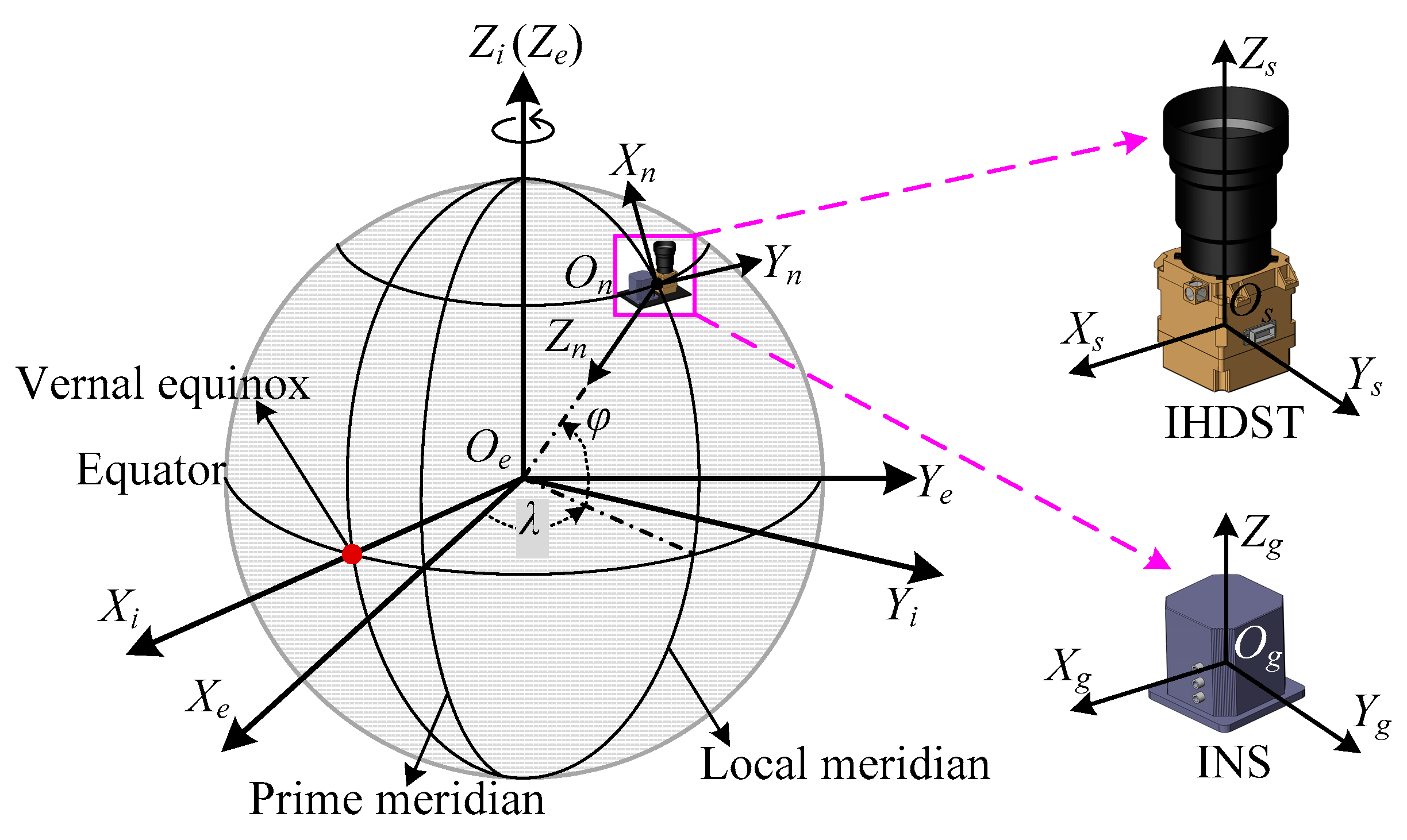
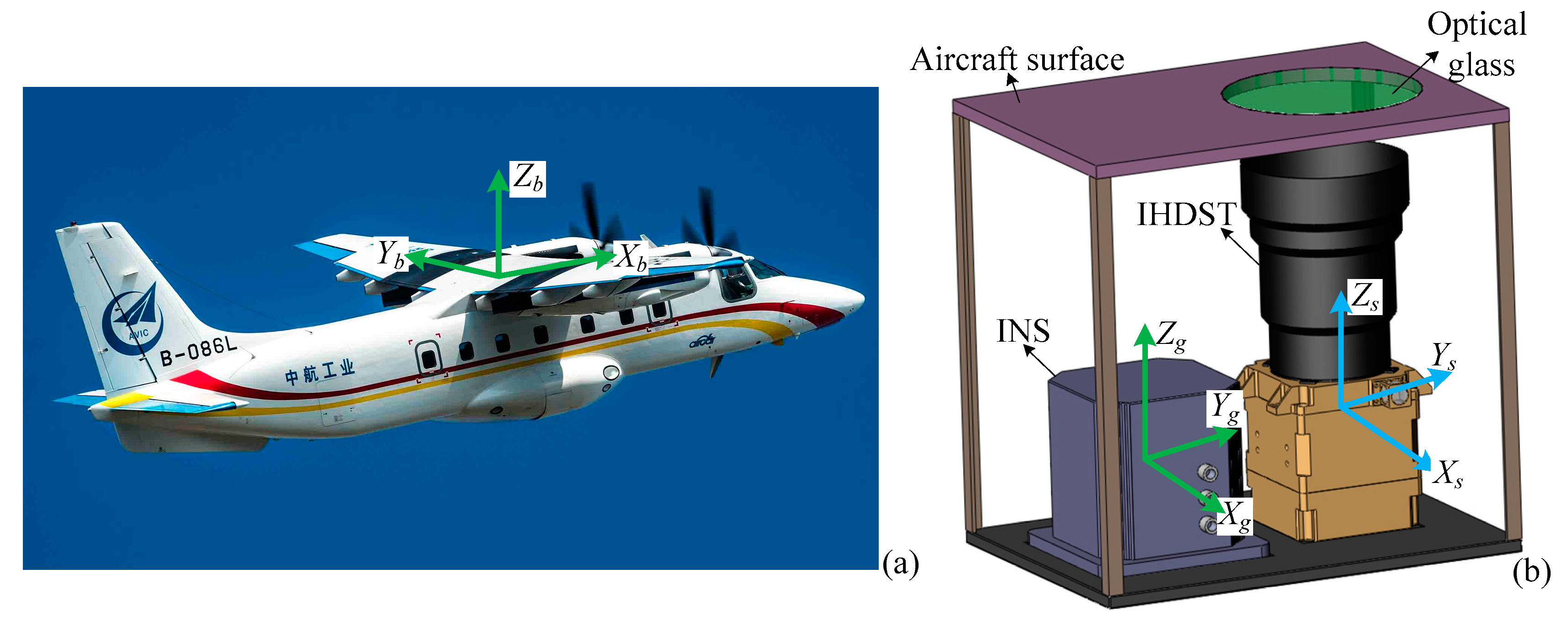
2.1. Coordinate Frame Definition
2.2. Reference Frame Conversion
2.2.1. Conversion from the i-frame to the e-frame
1) Precession Matrix
2) Nutation Matrix
3) Earth Rotation Matrix
2.2.2. Conversion from the e-frame to the n-frame
3. Decoupling Estimation of the Systematic Coordinate Errors of an INS and IHDST
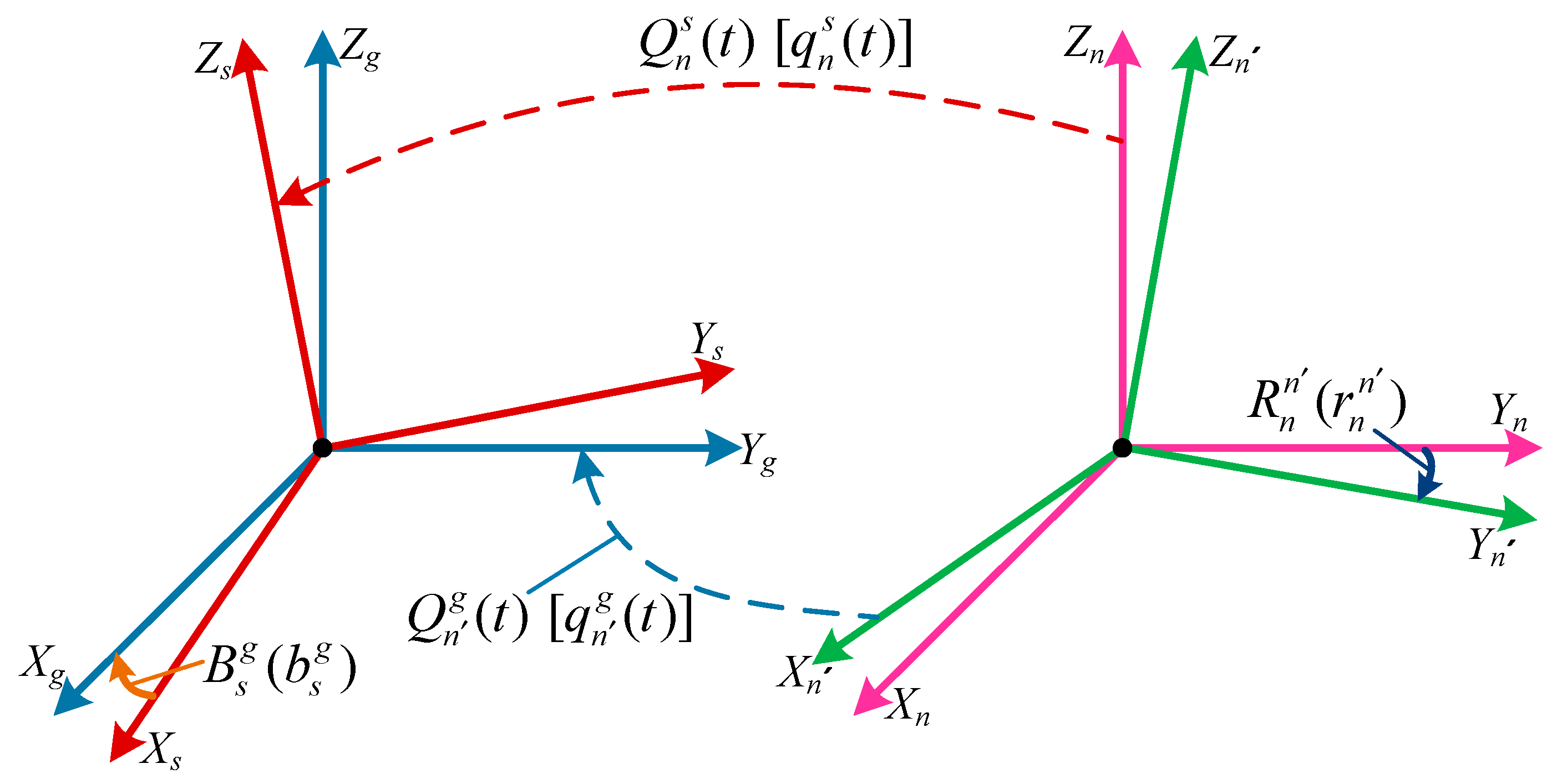
3.1. Decoupling Estimation Model
3.2. CLS-Based Optimization Method
4. Experiments and Discussion
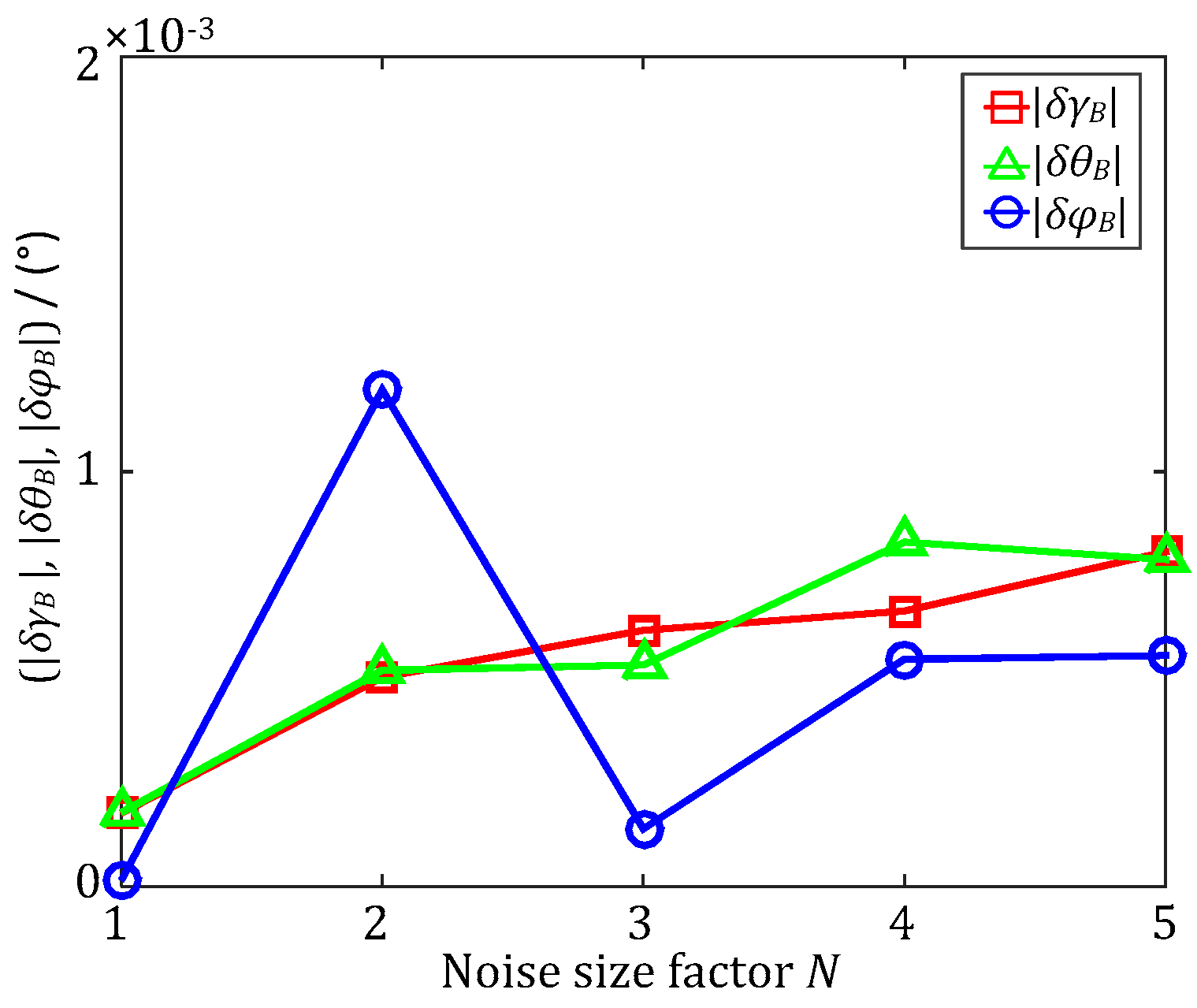
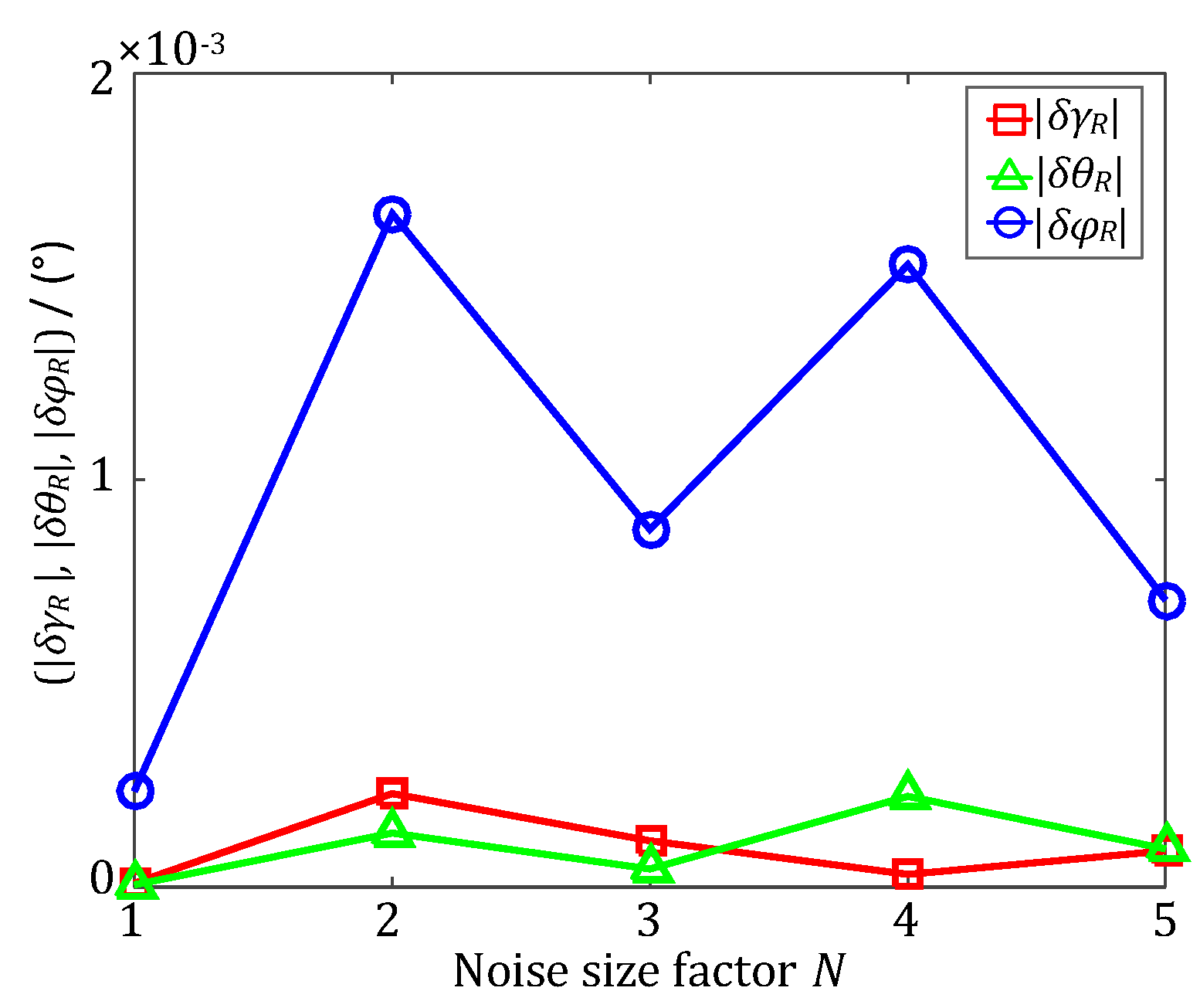
4.1. Simulated Experiments
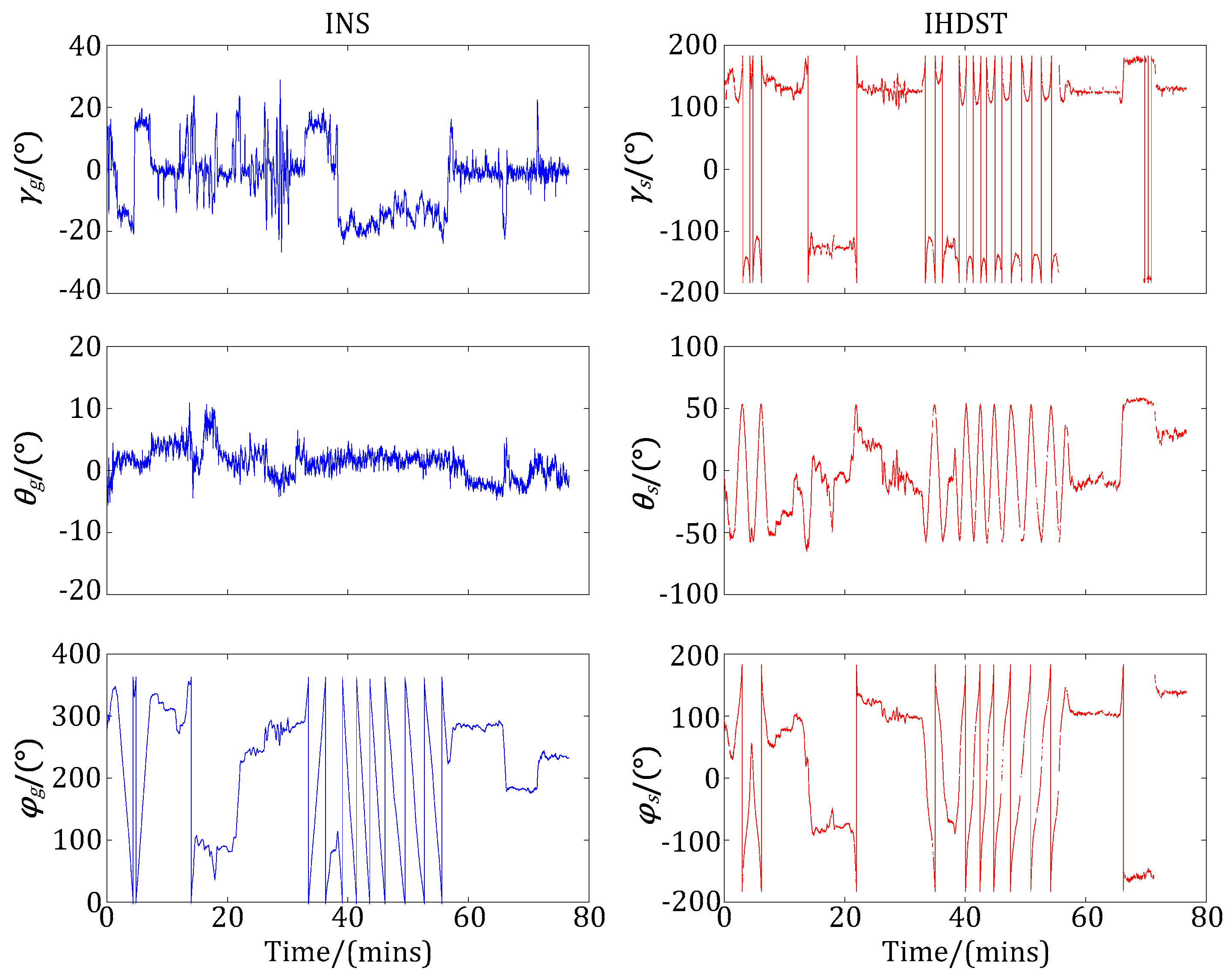
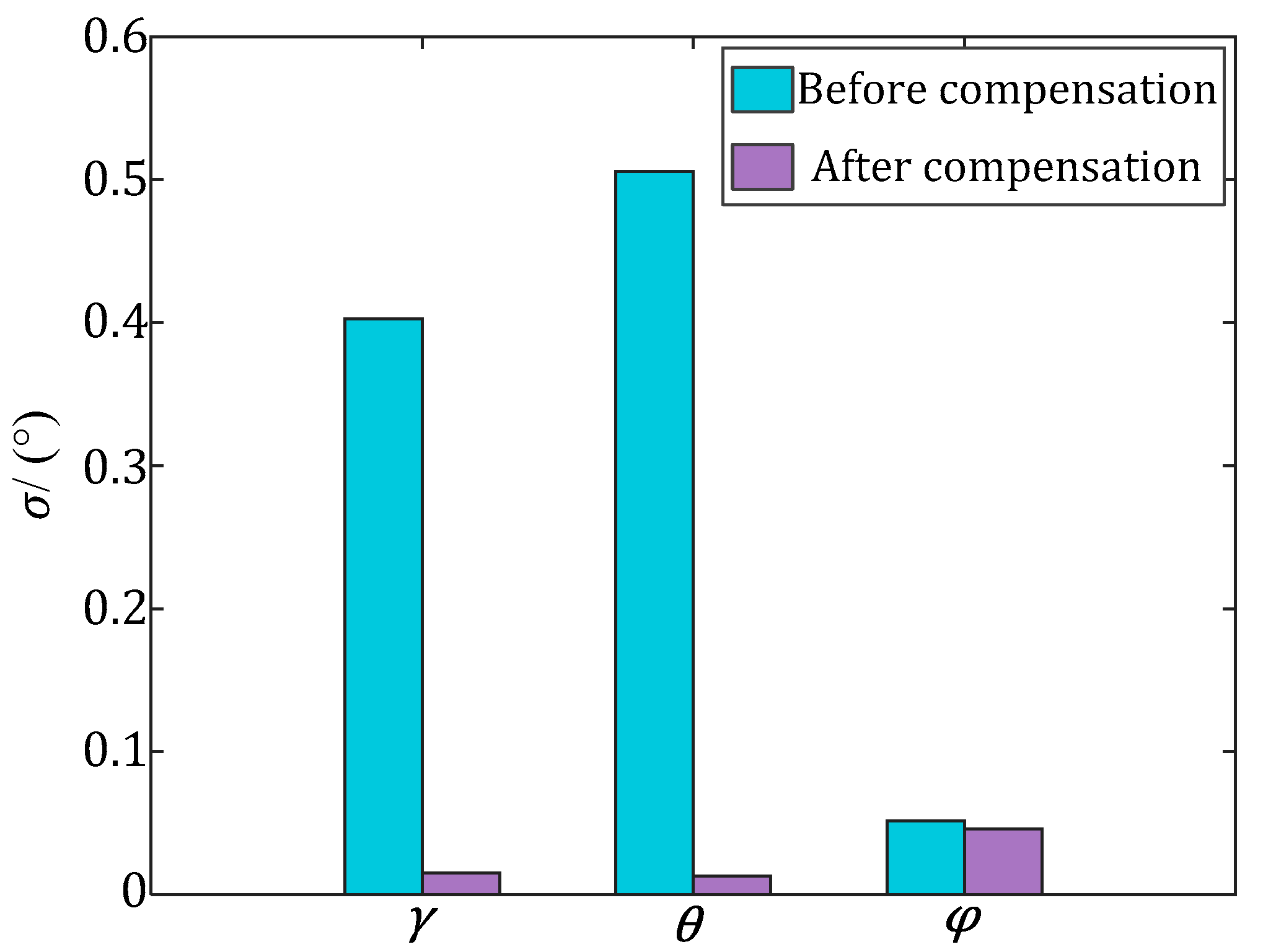
4.2. Real Experiments
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chang, L.; Li, Y.; Xue, B. Initial Alignment for a Doppler Velocity Log-Aided Strapdown Inertial Navigation System with Limited Information. IEEE-ASME Trans. Mechatron. 2017, 22, 329–338. [Google Scholar] [CrossRef]
- Deng, Z.; Sun, M.; Wang, B.; Fu, M. Analysis and Calibration of the Nonorthogonal Angle in Dual-Axis Rotational INS. IEEE Trans. Ind. Electron. 2017, 64, 4762–4771. [Google Scholar] [CrossRef]
- Ning, X.; Gui, M.; Xu, Y.; Bai, X.; Fang, J. INS/VNS/CNS integrated navigation method for planetary rovers. Aerosp. Sci. Technol. 2016, 48, 102–114. [Google Scholar] [CrossRef]
- Wang, Q.; Cui, X.; Li, Y.; Ye, F. Performance Enhancement of a USV INS/CNS/DVL Integration Navigation System Based on an Adaptive Information Sharing Factor Federated Filter. Sensors 2017, 17, 239. [Google Scholar] [CrossRef] [PubMed]
- Fan, Q.; Sun, B.; Sun, Y.; Zhuang, X. Performance Enhancement of MEMS-Based INS/UWB Integration for Indoor Navigation Applications. IEEE Sens. J. 2017, 17, 3116–3130. [Google Scholar] [CrossRef]
- Cai, Q.; Yang, G.; Song, N.; Liu, Y. Systematic Calibration for Ultra-High Accuracy Inertial Measurement Units. Sensors 2016, 16, 940. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Z.; Han, S.; Zheng, K. An eight-position self-calibration method for a dual-axis rotational Inertial Navigation System. Sens. Actuator A-Phys. 2015, 232, 39–48. [Google Scholar] [CrossRef]
- Gao, W.; Zhang, Y.; Wang, J. Research on Initial Alignment and Self-Calibration of Rotary Strapdown Inertial Navigation Systems. Sensors 2015, 15, 3154–3171. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.Y.; Kim, H.S.; Choi, K.H.; Lim, J.; Chun, S.; Lee, H.K. Adaptive GPS/INS integration for relative navigation. GPS Solut. 2016, 20, 63–75. [Google Scholar] [CrossRef]
- Hong, S.; Lee, M.H.; Chun, H.H.; Kwon, S.H.; Speyer, J.L. Experimental Study on the Estimation of Lever Arm in GPS/INS. IEEE Trans. Veh. Technol. 2006, 55, 431–448. [Google Scholar] [CrossRef]
- Liebe, C.C. Accuracy Performance of Star Trackers-A Tutorial. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 587–599. [Google Scholar] [CrossRef]
- Ma, L.; Zhan, D.; Jiang, G.; Fu, S.; Jia, H.; Wang, X.; Huang, Z.; Zheng, J.; Hu, F.; Wu, W.; Qin, S. Attitude-correlated frames approach for a star sensor to improve attitude accuracy under highly dynamic conditions. Appl. Opt. 2015, 54, 7559–7566. [Google Scholar] [CrossRef] [PubMed]
- Sun, T.; Xing, F.; Wang, X.; You, Z.; Chu, D. An accuracy measurement method for star trackers based on direct astronomic observation. Sci. Rep. 2016, 6, 22593:1–22593:10. [Google Scholar] [CrossRef] [PubMed]
- Hou, W.; Liu, H.; Lei, Z.; Yu, Q.; Liu, X.; Dong, J. Smeared star spot location estimation using directional integral method. Appl. Opt. 2014, 53, 2073–2086. [Google Scholar] [CrossRef] [PubMed]
- Sun, T.; Xing, F.; You, Z.; Wei, M. Motion-blurred star acquisition method of the star tracker under high dynamic conditions. Opt. Express 2013, 21, 20096–20110. [Google Scholar] [CrossRef] [PubMed]
- Katake, A.; Bruccoleri, C. StarCam SG100: A high update rate, high sensitivity stellar gyroscope for spacecraft. In Proceedings of the SPIE-IS&T Electronic Imaging, Bellingham, WA, USA, 2010; pp. 753608:1–753608:10. [Google Scholar]
- Xiong, K.; Jiang, J. Reducing Systematic Centroid Errors Induced by Fiber Optic Faceplates in Intensified High-Accuracy Star Trackers. Sensors 2015, 15, 12389–12409. [Google Scholar] [CrossRef] [PubMed]
- Yu, W.; Jiang, J.; Zhang, G. Multiexposure imaging and parameter optimization for intensified star trackers. Appl. Opt. 2016, 55, 10187–10197. [Google Scholar] [CrossRef] [PubMed]
- Sun, T.; Xing, F.; You, Z.; Wang, X.; Li, B. Deep coupling of star tracker and MEMS-gyro data under highly dynamic and long exposure conditions. Meas. Sci. Technol. 2014, 25, 085003:1–085003:15. [Google Scholar] [CrossRef]
- Wei, X.; Tan, W.; Li, J.; Zhang, G. Exposure Time Optimization for Highly Dynamic Star Trackers. Sensors 2014, 14, 4914–4931. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Hu, L.; Liu, G.; Yang, B.; Li, A. Kinematic model for the space-variant image motion of star sensors under dynamical conditions. Opt. Eng. 2015, 54, 063104:1–063104:11. [Google Scholar] [CrossRef]
- Yan, J.; Jiang, J.; Zhang, G. Dynamic imaging model and parameter optimization for a star tracker. Opt. Express 2016, 24, 5961–5983. [Google Scholar] [CrossRef] [PubMed]
- Jiang, J.; Huang, J.; Zhang, G. An Accelerated Motion Blurred Star Restoration Based on Single Image. IEEE Sens. J. 2017, 17, 1306–1315. [Google Scholar] [CrossRef]
- Yu, W.; Jiang, J.; Zhang, G. Star tracking method based on multiexposure imaging for intensified star trackers. Appl. Opt. 2017, 56, 5961–5971. [Google Scholar] [CrossRef]
- Jiang, J.; Xiong, K.; Yu, W.; Yan, J.; Zhang, G. Star centroiding error compensation for intensified star sensors. Opt. Express 2016, 24, 29830–29842. [Google Scholar] [CrossRef] [PubMed]
- Yan, J.; Jiang, J.; Zhang, G. Modeling of intensified high dynamic star tracker. Opt. Express 2017, 25, 927–948. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Zhang, C.; Lu, J. Local Observability Analysis of Star Sensor Installation Errors in a SINS/CNS Integration System for Near-Earth Flight Vehicles. Sensors 2017, 17, 167. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; You, Z.; Zhao, K. Inertial/celestial-based fuzzy adaptive unscented Kalman filter with Covariance Intersection algorithm for satellite attitude determination. Aerosp. Sci. Technol. 2016, 48, 214–222. [Google Scholar] [CrossRef]
- Ning, X.; Liu, L. A Two-Mode INS/CNS Navigation Method for Lunar Rovers. IEEE Trans. Instrum. Meas. 2014, 63, 2170–2179. [Google Scholar] [CrossRef]
- IERS Conventions (2010). Available online: https://www.iers.org/IERS/EN/Publications/TechnicalNotes/tn36 (accessed on 7 June 2017).
- McCarthy, D.D.; Luzum, B.J. An abridged model of the precession-nutation of the celestial pole. Celest. Mech. Dyn. Astron. 2003, 85, 37–49. [Google Scholar] [CrossRef]
- Chong, E.P.; Żak, S.H. An Introduction to Optimization, 4th ed.; Sun, Z.; Bai, S.; Zheng, Y.; Liu, W., Translators; Publishing House of Electronics Industry: Beijing, China, 2015; ISBN 978-712-126-715-4. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Accuracy (″) | <1 (pointing), <10 (rolling) (1σ) |
| Sensitivity (Mv) | 9.0 |
| Maximum angular rate (°/s) | 25 |
| FOV (°) | 20 × 20 |
| Update rate (Hz) | 25 |
| Power consumption (W) | 5 |
| Weight including baffle (kg) | 1.4 |
| Dimensions including baffle (mm) | 130 × 130 × 285 |
| Euler Angles of the Installation Error (γB, θB, φB) (°) | Euler Angles of the Misalignment Error (γR, θR, φR) (°) |
|---|---|
| (−0.0579, −0.4665, 0.7979) | (−0.6590, −0.0815, 0.4441) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, J.; Yu, W.; Zhang, G. High-Accuracy Decoupling Estimation of the Systematic Coordinate Errors of an INS and Intensified High Dynamic Star Tracker Based on the Constrained Least Squares Method. Sensors 2017, 17, 2285. https://doi.org/10.3390/s17102285
Jiang J, Yu W, Zhang G. High-Accuracy Decoupling Estimation of the Systematic Coordinate Errors of an INS and Intensified High Dynamic Star Tracker Based on the Constrained Least Squares Method. Sensors. 2017; 17(10):2285. https://doi.org/10.3390/s17102285
Chicago/Turabian StyleJiang, Jie, Wenbo Yu, and Guangjun Zhang. 2017. "High-Accuracy Decoupling Estimation of the Systematic Coordinate Errors of an INS and Intensified High Dynamic Star Tracker Based on the Constrained Least Squares Method" Sensors 17, no. 10: 2285. https://doi.org/10.3390/s17102285