1. Introduction
A new generation of atomic clocks, the Chip Scale Atomic Clock (CSAC), are now commercially available. Atomic clocks price, size and power consumption have been reduced considerably in recent years [
1,
2]. This tendency is driving Global Navigation Satellite Systems (GNSS) providers to incorporate a CSAC into their high-end products, in particular for Global Positioning Systems (GPS) (i.e., Symmetricom GPS-2700 and GPS-2750) in order to improve the performance of their navigation solutions.
The theoretical basis underpinning GNSS is the triangulation of satellite signals whose range is derived by measuring, as precisely as possible, their propagation time. Thus, clocks are the fundamental components of GNSS; they are used to estimate the propagation time, or equivalently, the pseudoranges [
3]. Since the positioning solution performance fully relies on clock measurements, transmitter and receiver clocks must be as synchronized as possible. Currently, the non-synchronization of both clocks is mainly attributable to the accuracy and stability of receiver clocks (which are far less stable than satellite clocks). GNSS receivers normally include a Temperature Compensated Cristal Oscillator (TCXO) clock that exhibits a noisy short-term stability and a poor long-term stability [
4]. That is why clock error is estimated epoch by epoch (thus, improving TCXO clocks’ short-term stability) with help from the GNSS signal. To overcome the long-term instability of TCXO, they are time-disciplined with the satellites’ atomic clocks. Although CSAC clocks are also affected by long-term instability, they exhibit high short-term stability [
4]. Thus, a combination of CSAC short-term stability and satellite GNSS disciplined long-term stability results in better timing synchronization [
5], and better navigation performance (but only if the GNSS signal is not degraded enough to result in an unsatisfactory disciplining process).
A Defense Advanced Research Projects Agency (DARPA) CSAC program was the basis of CSAC technology development [
1]. It evolved from classical atomic clocks by reducing their size and power consumption through the use of new technologies such as Micro-Electro-Mechanical Systems (MEMS). The oscillator of atomic clocks uses an electronic transition frequency in the microwave region of the electromagnetic spectrum of atoms. The most common elements used are hydrogen, caesium and rubidium. In the specific case of the CSAC, it is based on caesium. A feedback loop is used to lock the frequency, thus becoming a more stable reference. At start-up, a CSAC’s typical accuracy is 10
−10 s, improving to 10
−12 s after 3000 s of GNSS disciplining [
6].
Once the CSAC is properly disciplined the GNSS receiver can benefit from its accuracy. First, there is an improvement in the correlator’s synchronism, which is attributable to the reduction of the PLL bandwidth. Thus, it helps improve the tracking recovery time (holdover) and the signal to noise ratio (SNR) [
7]. In previous work [
6] it has been demonstrated that using a CSAC with a GNSS receiver increases the time to recover after an outage occurs. Other contributions to GNSS navigation are the improvement of the navigation solution in terms of vertical positioning accuracy [
4], multipath [
7], jamming mitigation and spoofing attack detection [
4]. Multipath, jamming and spoofing are well-known GNSS signal degrading effects that are part of the common GNSS vulnerabilities. These vulnerabilities can broadly be related to the system (i.e., receiver), the propagation channel and interferences (accidental or intentional), at which the GNSS community have already proposed many approaches to mitigate their effects [
8,
9]. A different approach, to improve the signal tracking, to avoid gross pseudorange errors and to mitigate multipath, is the increment of the coherent integration time up to few seconds [
10], for which a highly stable clock is required.
Previous studies with CSAC and GNSS receivers show the contribution of atomic clocks to obtain a navigation solution using only three satellites [
11,
12,
13]. In addition, by adding a precise clock to a GNSS receiver, it is possible to obtain position with no need to estimate the receiver clock errors for a long period (<10,000 s) by using the clock coasting estimation method [
13]. This technique allows the determination of a positioning solution with only three satellites while classical methods require at least four satellites. The works presented in [
12,
14] have shown that the combined use of CSAC and GNSS helps mitigate multipath effects. An interesting consequence is that the quality of the navigation solution obtained in non-favourable conditions such as poor satellite availability (<6) or difficult scenarios (urban canyons, and forests) is improved. This means reducing the positioning error. The mitigation of the multipath problem is due to the smaller bandwidth the correlator has to work with, which is a result of the short-term stability of the atomic clock [
7].
However, before integrating an atomic clock into a GNSS receiver, it is necessary to characterize it and model its errors. Details about the CSAC internal elements and some results of its prototyping development and their behaviour are public [
1]. CSAC oscillation stability is conditioned by certain factors, such as packaging imperfections. CSAC is built on a thermal isolation package and it self-compensates temperature changes to operate at a constant temperature of around 80 °C [
1]. This is similar to how OCXO clocks operate. OCXO are a step beyond TCXO in terms of stability, but their consumption and size are higher due to their intrinsic heating system [
15]. However, the lack of an OXCO unit blocked their inclusion on this study. Then, the frequency of the caesium coherent population trapping (CPT) is not perfectly stable, as it deviates from the nominal value. Its resonance frequency deviation is mainly due to changes in the buffer gas and the laser spectrum [
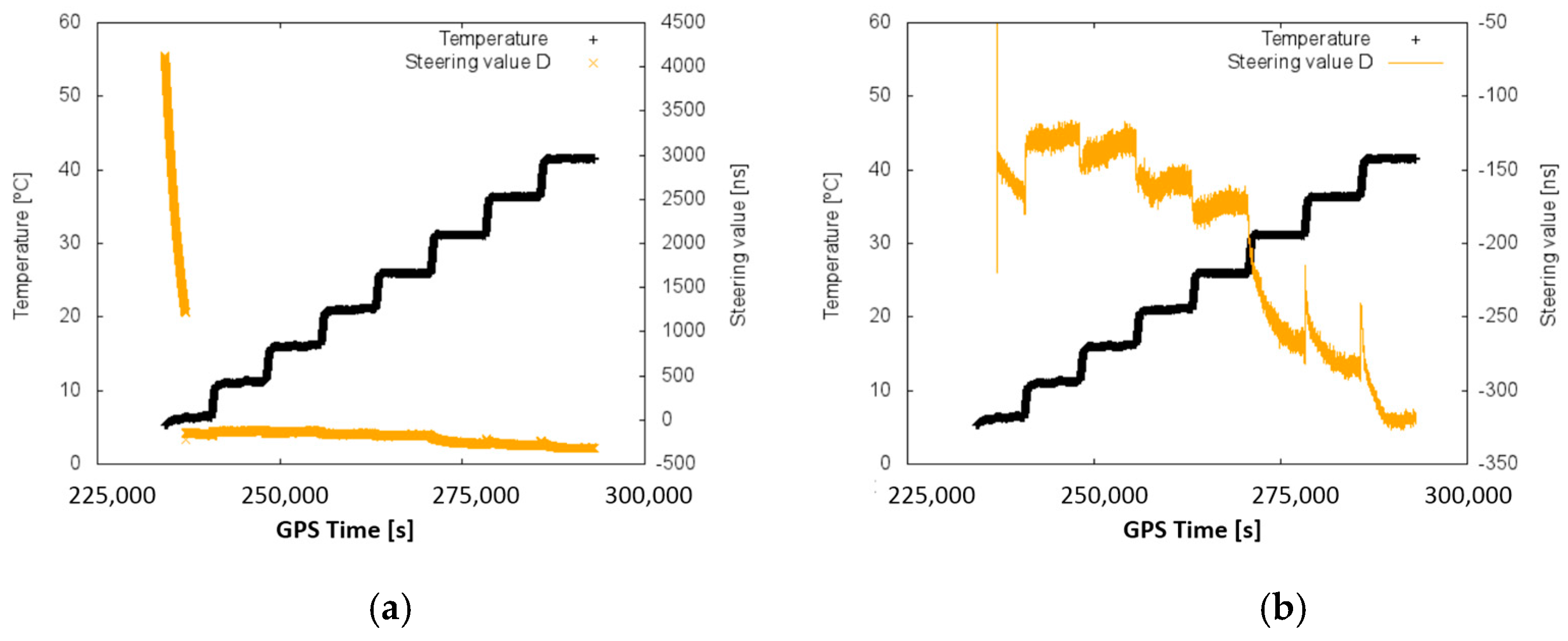
1]. In addition, the deterioration of the physical package of the CSAC due to aging also affects the frequency variations (this effect is one of the objects of study). Previous studies show a correlation between the temperature and the steering value of the CSAC (
Figure 1) [
6,
16]. The steering value is a frequency offset correction that affects to the CSAC output frequency.
The main objective of this study is to contribute to the quantification of the benefits of adding a properly modelled CSAC time source to a GNSS receiver. To achieve this objective, the study presented in this paper focus on two complementary purposes. First, it aims to rigorously model CSAC behaviour. To do so, a CSAC clock characterization, calibration (at different temperatures) and aging evaluation were done. The second purpose of the study is to evaluate the impact of the previous characterization and calibration in the terms of track recovery time after outages (holdover), with a properly disciplined CSAC and in terms of position scattering solution, mainly the Vertical Dilution of Precision (VDOP), with a CSAC calibrated by temperature.
The paper is therefore organized as follows: first (
Section 2), a brief theoretical overview related to clock modelling and GNSS positioning is presented. After that (
Section 3), the research materials and methods needed for the completion of this study are presented. Next, an overview of the expected results is given, (
Section 4) followed by the main results of the project (
Section 5) and some discussion on them. Finally, the reader will find a concluding section (
Section 6), with explanations about the results and some future research directions suggested by the authors of this study.
2. Theoretical Overview
Oscillators produce a periodical signal. Far from oscillating at a constant frequency, they always suffer deviations with respect to their nominal frequency [
17]. The performance of a clock is normally presented through its stability value, which represents the ability to maintain a nominal frequency output.
In the GNSS context, the following clocks are considered, from high to low performance (in terms of stability):
Rubidium/Caesium Atomic Clocks—used in satellites;
Caesium Chip Scale Atomic Clock (CSAC)—used in some high-grade receivers; and
TCXO—used in most of the commercial receivers.
Although with different severity grades, all oscillators suffer from systematic errors coming from environmental effects such as vibrations, shock, radiation, humidity, temperature and aging. Therefore, by determining these systematic errors it is possible to adjust a better clock model and to improve GNSS performance.
2.1. Clock Error Modelling—Allan Variance
The Allan variance (AVAR) [
17] is a well-known technique used to measure an oscillator’s stability. This method is suitable for estimating stability due to noise processes (
Figure 2), such as the White PM (Phase Modulator) or Flicker PM (related with the quantization noise), the White FM (Frequency Modulator) also known as Angle random walk, the Flicker FM also named BIAS instability and the RW FM (Random Walk Frequency Modulator). The Allan variance is not a tool for the characterization of systematic errors such as temperature effects. Other methods to evaluate clock performance, especially long-term, are theoretical and total variances [
17,
18,
19]. Another different tool, very extended to characterize precise clocks, is the dynamic Allan variance (DAVAR). DAVAR technique is able to obtain a series of common clock anomalies, such as a sinusoidal term, a phase jump, a frequency jump, and a sudden change in the clock noise variance [
20]. An advantage of DAVAR compared to AVAR is its ability to model the time-varying stability of a clock [
21].
In this study, clock characterization is only based on Allan variance due to our knowledge with this technique, also used to characterize the stochastic noises of inertial sensors (which is another field of work of our research group). Furthermore, the Allan variance is a typical parameter provided by the manufacturers.
The Allan variance,
, is mathematically defined as:
where
γ(
ι) is the normalized frequency difference between the frequency and the nominal frequency averaged over the measurement interval
τ [
17].
In the frequency domain, the Allan variance,
, represents the spectral density of the fractional frequency deviation used to identify the different frequency noise sources of oscillators, [
17,
19]. The fractional frequency is the normalized frequency deviation from its nominal value [
16].
where
f is the sampling frequency and
is the clock’s variance power spectrum. Typically, only h
0 (white noise),
h−1 (flicker noise), and
h−2 (random walk noise) values are used to define the clock’s Allan variance and to model the clock error behaviour. The theoretical noise values of CSAC and TCXO clocks are obtained from
Figure 2b [
22] and their values are shown in
Table 1 (these values are generic for a certain unknown conditions and provided by the CSAC manufacturer).
2.2. Clock Steering and Disciplining
All clocks have an inherent drift, which is not constant in the long term. The process considered in this study consists on estimating and applying an oscillator frequency correction parameter: the steering value. In order to obtain this value, the oscillator under evaluation is monitored and compared with a reference oscillator by measuring the phase difference between both clocks [
13,
23]. This measurement can be performed through a disciplining process.
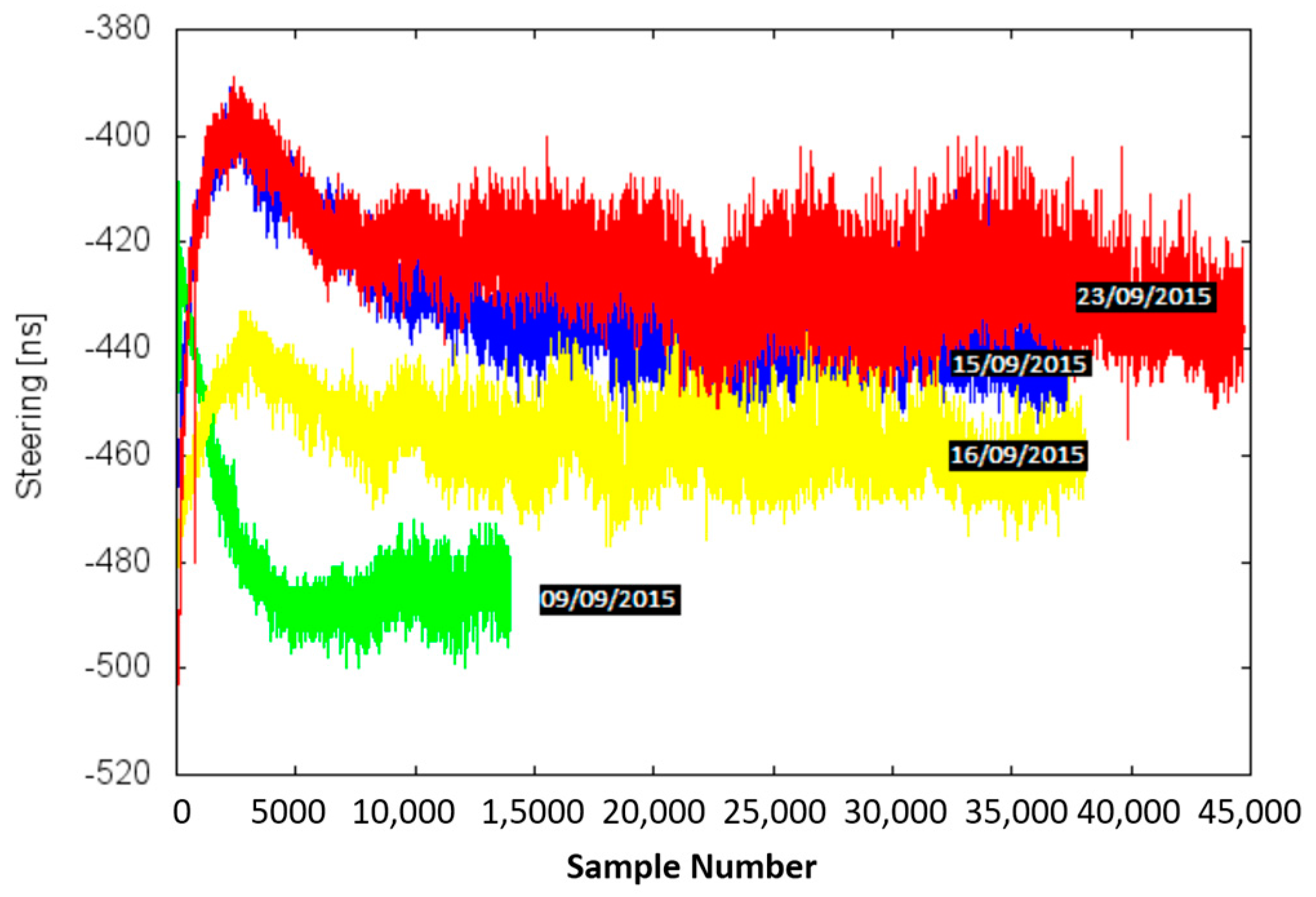
Disciplining is the procedure of computing the steering value and using it to modify the oscillation frequency. To obtain a reliable steering value, the previously presented procedure is periodically carried out, computing clocks phase difference between CSAC and a PPS (Pulse Per Second) event generated by the GNSS receiver. The obtained steering values are time-filtered to avoid errors due to jitter noise. After the completion of the disciplining process the clock achieves its maximum stability. The accuracy of the final computed steering value depends on many factors such as aging, environment (i.e., temperature, magnetic fields, etc.) and reference clock performance. For proper clock performance, the estimated steering value should be applied in every clock initialization. However, this value is not constant over time, and it must be periodically recomputed. The variability of the CSAC steering value is presented in the next section.
A critical step in the disciplining process is the selection of the data averaging time. A joint analysis of target clock error models and reference clock error models must be performed. This can be easily done by means of the Allan Variance charts: the optimal averaging time is that at which the noise of the reference clock and the noise of the target clock are the same. If the averaging time is lower than the intersection clock noise values, the algorithm will not reach the maximum stability due to the poor short-term stability of the reference oscillator. Otherwise, if the selected averaging time is higher than the intersected value, the algorithm will take more time to reach the stability. If it is wished to discipline a GNSS receiver, the data of
Figure 2b can be used. According to this, the GNSS and CSAC noises are coincident at approximately
τ = 3000 s. Other studies from the manufacturer specify that it is better to set
τ = 5000 s [
24]. To obtain an accurate steering value the disciplining time should be at least 3 times the disciplining filter window. Therefore, this process usually requires few hours (i.e., with a filter window of 5000 s, the process will take from 3 to 4 h).
2.3. GNSS Position and Clock Correction Estimation
A brief review of the code-based position and clock correction estimation algorithm is presented in this section. One of the methods that GNSS receivers implement to estimate the position and clock correction value is through the pseudorange measurements, that is, the distance between the satellites and the receiver. In order to measure these pseudoranges the GNSS receiver computes the time that the signal takes to travel from the satellite to the receiver. As an initial approximation, if we do not consider the atmospheric (ionospheric and tropospheric) refractivity variations, it is possible to obtain the distance between the GNSS receiver and the satellite by using the speed of light constant. Finally, knowing the satellite positions, the receiver localization is obtained by means of triangulation. Since the clock receiver is not perfectly synchronized with the satellite’s clocks, the error in measuring travel times is directly translated into a systematic error in pseudoranges. This error can be up to 0.3 m for each pseudorange measurement, leading to a fully incorrect position estimation (few meters of error). The value of 0.3 m is obtained by the multiplication of the theoretical TCXO clock bias (10
−9) by the constant of light velocity [
25].
Thus, GNSS receivers usually require at least four pseudoranges to solve the receiver’s position and clock correction. The system needs to determine four unknowns; three are to determine the position and the last is to determine the receiver’s clock error. The following equations must be completed for each satellite in a single GNSS signal frequency processing (i.e., GPS L1):
where
Pk is the observed pseudorange,
vk is the residual error,
Xk is the known satellite position,
Kk are the atmospheric and instrumental corrections, and
X and (
b,
f) are the unknown receiver position and the unknown receiver clock corrections (bias and drift). The drift is multiplied by a time increment (∆
t) and
c is the constant of light velocity. The receiver position is considered as a random walk process (
) with its process noise (
) directly related to the vehicle dynamics (linear and angular velocities) of around
, while the clock error is considered as a stochastic process controlled by b and f with a bias process noise (
), of around 10
−9 (Allan deviation at
τ equal to 1 s) and a drift process noise (
) of around 10
−10. Please note that this system is not observable for less than four pseudoranges.
By using a stable oscillator, such as the CSAC (with a known clock model error), it is possible to estimate the position with only three satellites. This can be achieved for a period (typ. < 10,000 s) by synchronizing the CSAC with the GNSS time. Due to the short-term stability performance, the CSAC can be considered as a reference clock value whose residual error is below 10
−12 s, or equivalently below one millimetre. Thus, it can be assumed that the system is only able to determine a solution within specifications with three satellites. The following equations must be completed for each satellite and each available frequency:
where
Pk is the measured pseudorange,
Xk is the known satellite position,
Kk are the modelled or provided atmospheric and instrumental corrections,
dt is the receiver clock correction,
X are the unknown receiver position and
c is the constant of light velocity.
vk is the residual error.
In the new model, the receiver position is once again considered as a random walk process with a process noise (
) directly related to the vehicle dynamics, while the clock error is considered as a random walk process with a process noise (
) of around 10
−12 [
26].
6. Conclusions
This study presents a characterization of the CSAC, examining in detail the delays introduced by the interface (PCB) board for a better synchronization of CSAC and a GNSS receiver. The measured delay values are slightly different from the theoretical values but these minor differences could be due to the tolerances of the components used and some approximations of the values (i.e., cable delays). It is also unknown whether the CSAC internally corrects the phase meter measurements, though the results seem to prove that it does. In any event, these results are considered consistent with the expectations.
The temperature calibration process of the CSAC is proven as valid. The clock performance of the CSAC is greatly improved and the system is able to work in a dynamically changing environment, keeping the clock stability to its lowest possible value (10
−12, see
Figure 9). Instead, the traditional disciplining process (of some hours of duration) cannot compensate changes in the room temperature. The aging of the CSAC has been proven to coincide with the manufacturer’s specifications (9 × 10
−9 s/month) in most of the cases, but not always (i.e., data series 18/03 and 08/04 in
Figure 11). This could be due to a degradation of the packaging, which would be less constant than expected over time. More evaluations in the aging of the CSAC can help to determine the causes of its degradation irregularity.
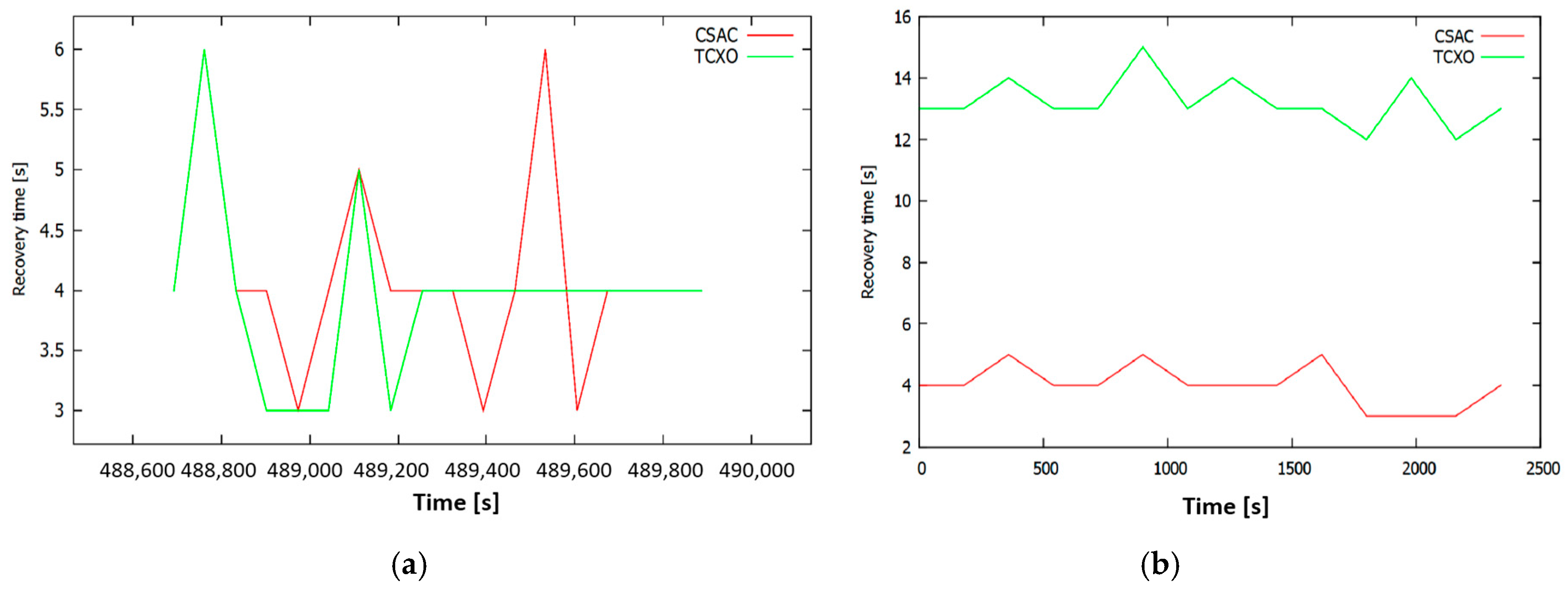
In the particular case of the holdover performance evaluation, everything worked as expected (see
Table 7). For short holdover time lapses (10 s), there are no differences between the CSAC and the TCXO results. The holdover time lapse is so short that neither clock has degraded enough to affect the recovery time of the receiver. In another evaluated case, with a higher time lapse (1 min or more), the CSAC significantly helped stabilize the recovery time needed (no more than 4 s, see
Figure 7). On the other hand, in the case of the TCXO, this time was increased, and had a random behaviour. Hence, the recovery behaviour of a GNSS receiver, with a CSAC integrated, is always equal or better in a hot start condition than one with its internal TCXO.
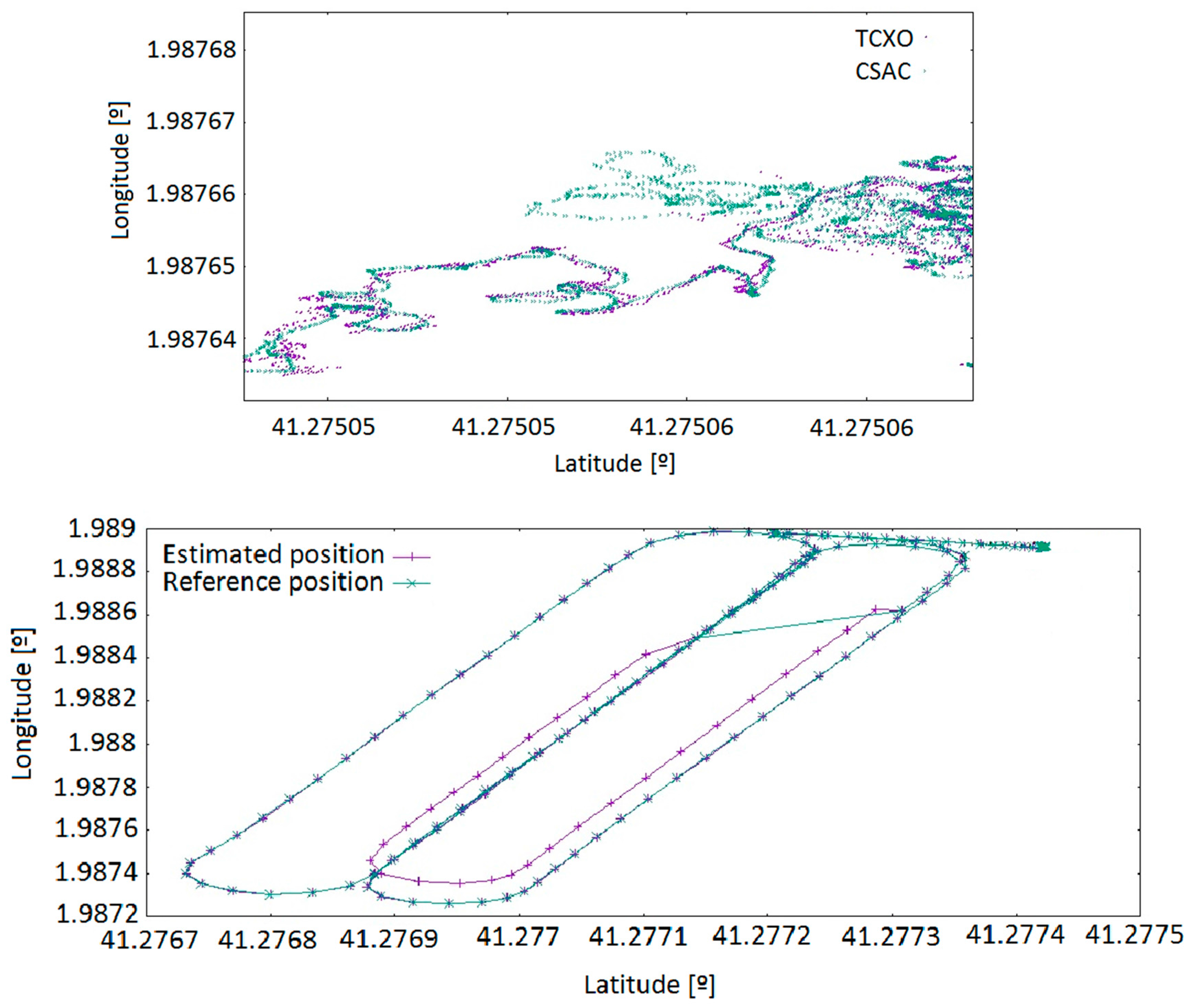
It was proved that the CSAC clock makes it possible to estimate position within specifications even when only three satellites are available. It has also been observed that the impact of reducing and simplifying the clock unknown has almost no impact in planimetry performance neither for static nor dynamic trajectories. However, the results demonstrate that having access to these precise clocks has a relevant impact on the performance of height estimations in both scenarios.
Future research will focus on the study of the benefits of the use of a CSAC in jamming and spoofing scenarios. Moreover, the hot/warm/cold start behaviours in different scenarios can be more deeply evaluated.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}