
A Topology Control Strategy with Reliability Assurance for Satellite Cluster Networks in Earth Observation

Abstract
:1. Introduction
- A cooperative work model in SCNs with emergency EO missions is proposed to give an application case when facing emergency situations. The large scale, complex and dynamic SCNs is decoupled into three kinds of satellites through different working modes, which make the topology control of SCNs easier.
- A novel link cost metric of reliability is proposed to give the selection criterion for choosing the most reliable data routing paths. Through the laws of satellites relative motion, the periodicity and predictability of satellites’ relative position in SCNs are involved in the link cost metric to enhance each chosen ISLs’ reliability.
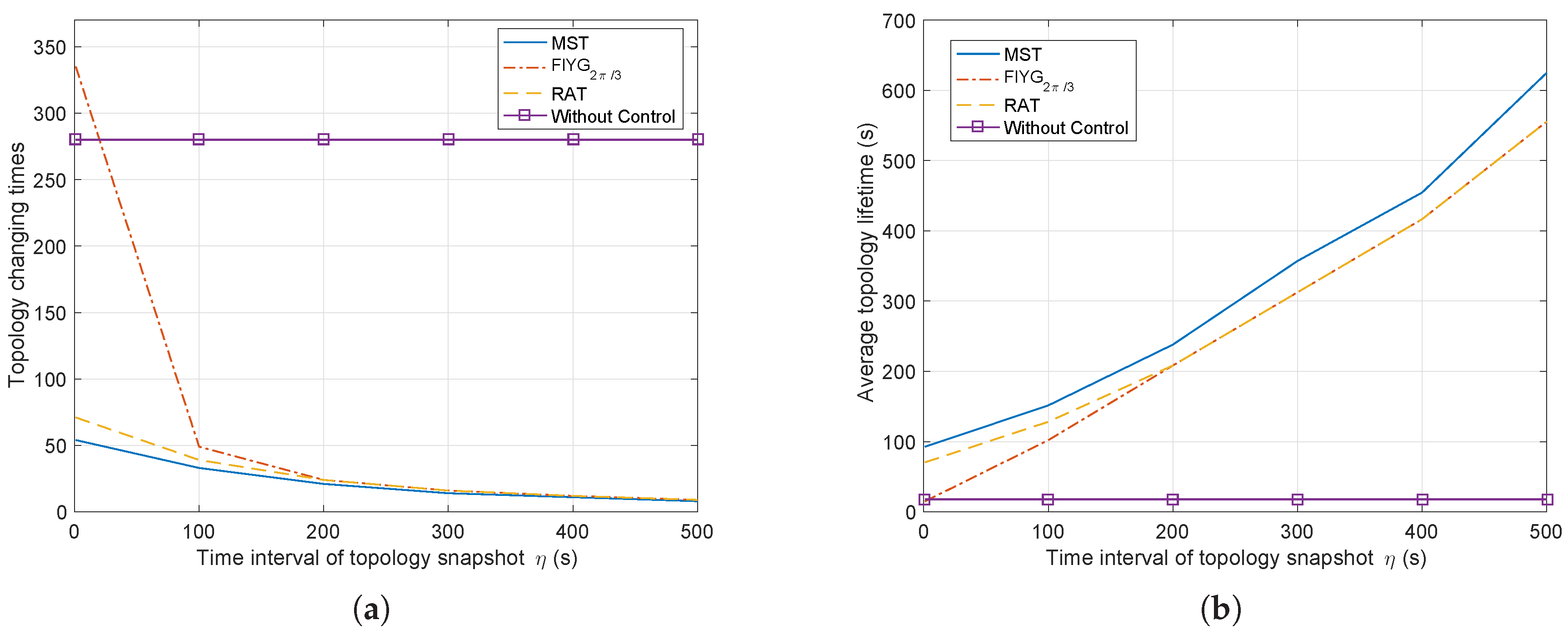
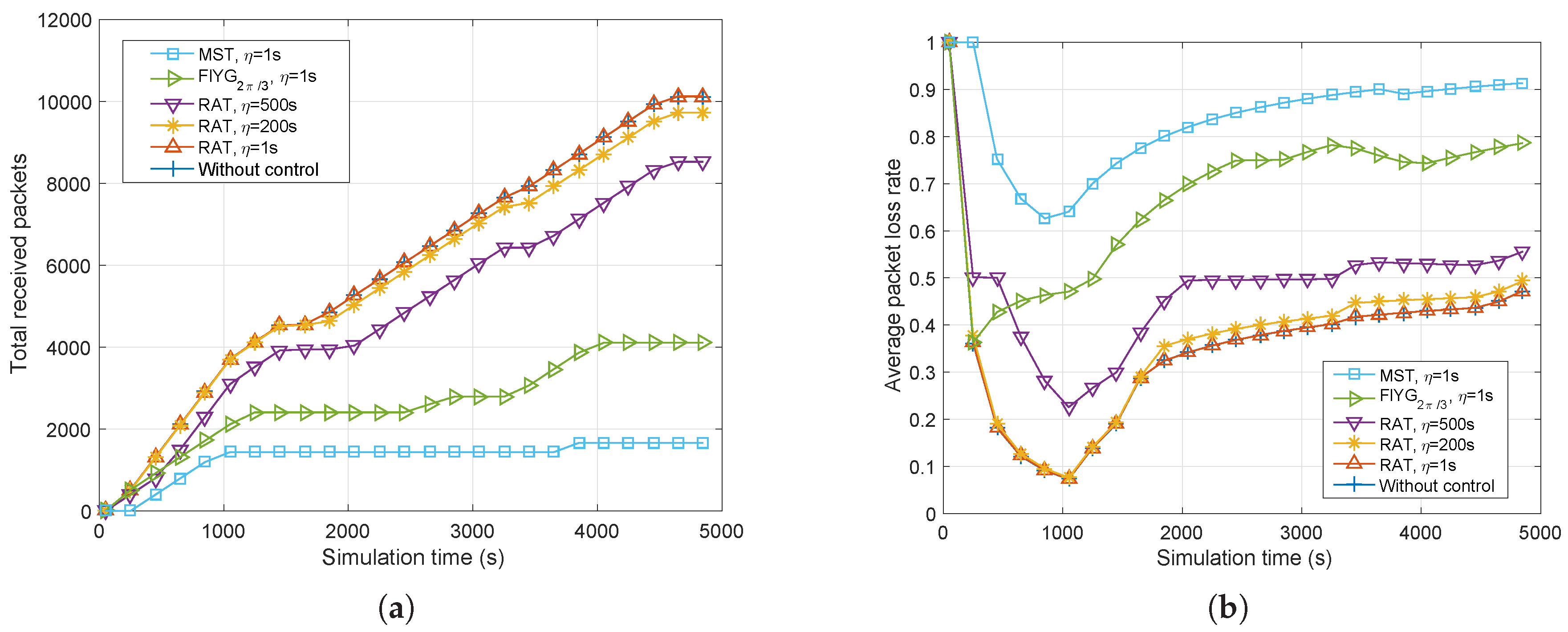
- A topology control strategy with reliability assurance is proposed to solve the problem of topology management in the dynamic and unstable SCNs. Through some numeric simulations, the proposed reliable strategy has been tested in term of effectiveness of improving data transmission performance and extending average topology lifetime.
2. Network Description
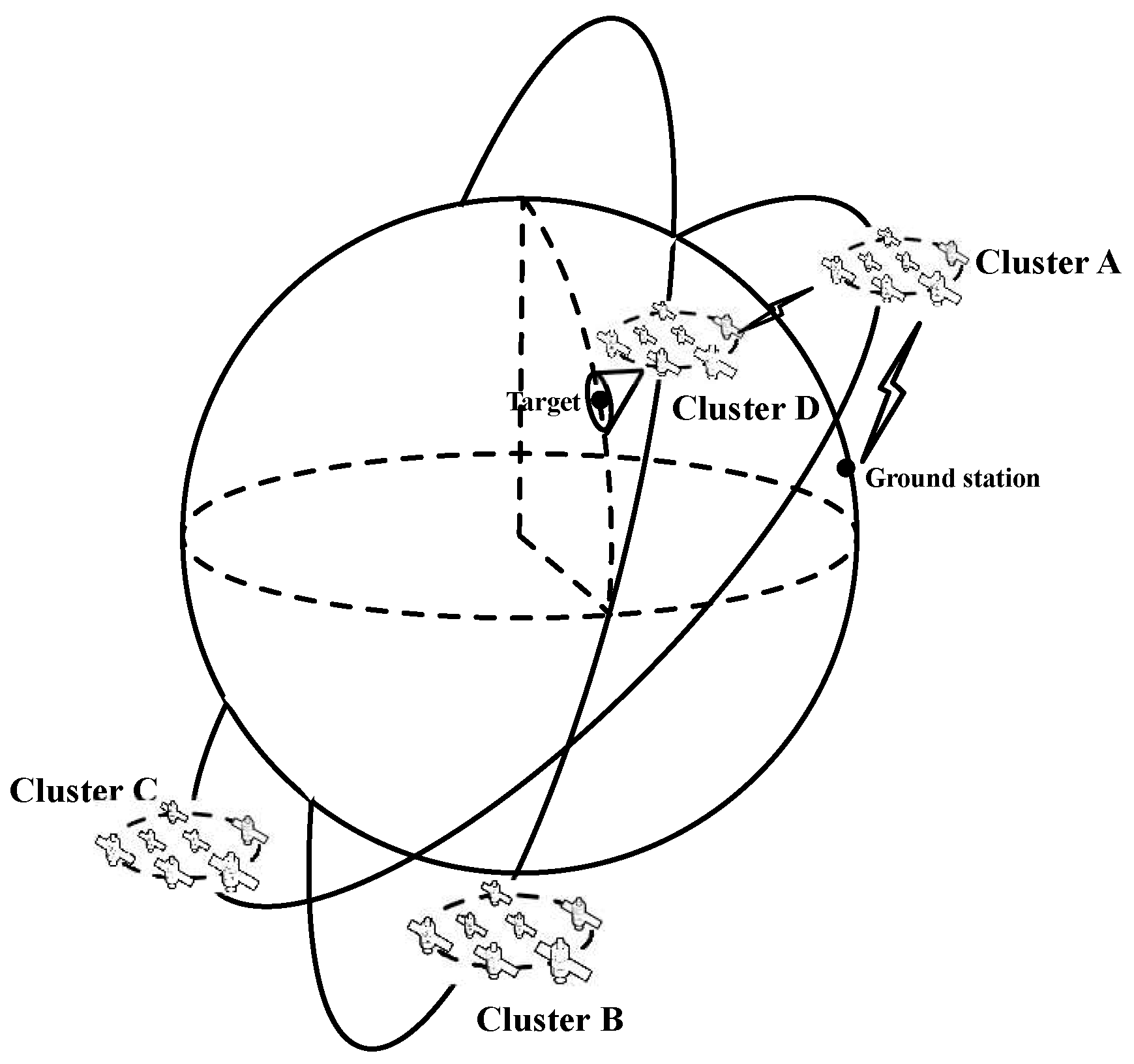
2.1. Satellite Cluster Network
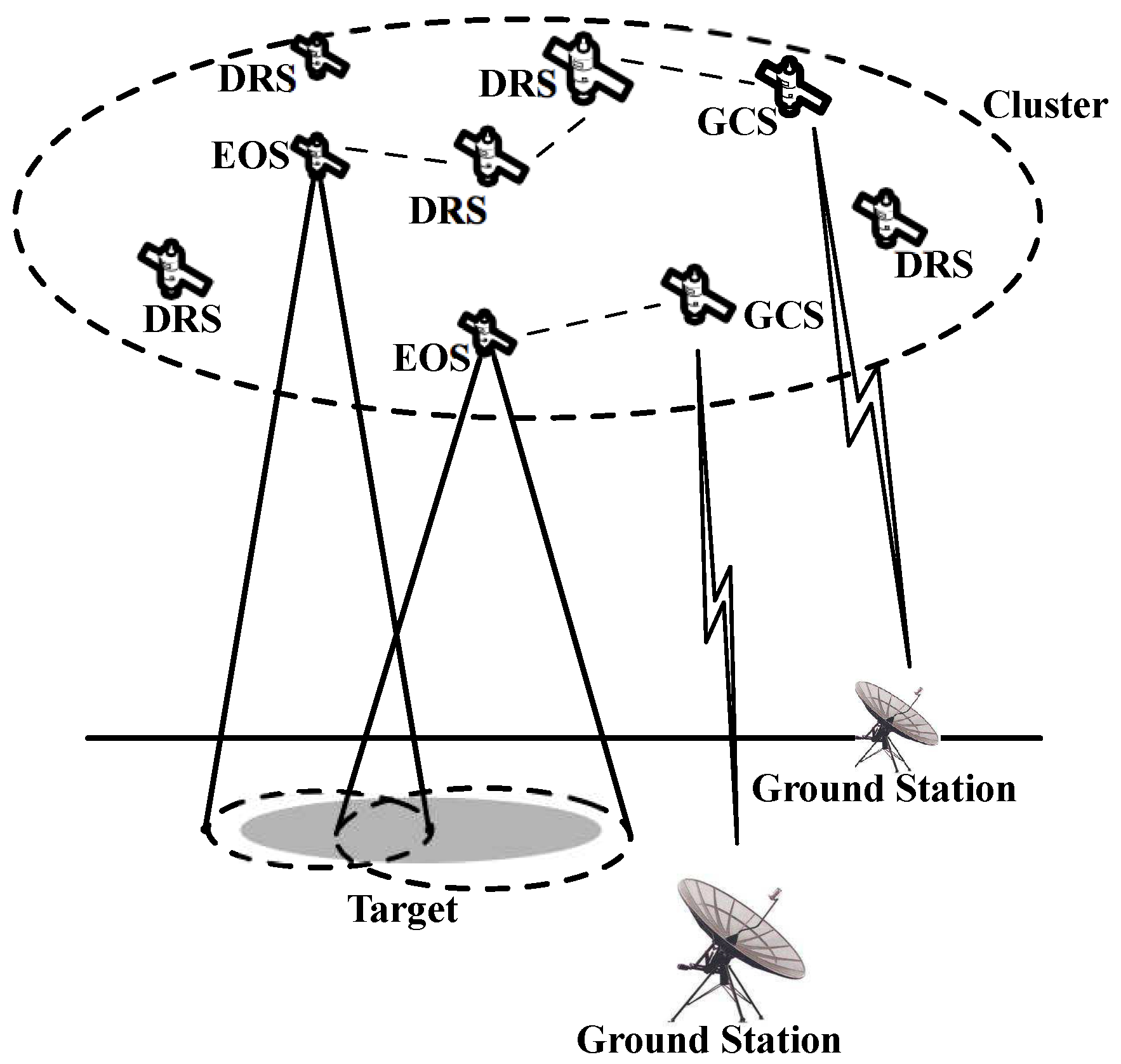
2.2. EO Missions on Satellite Cluster Network
3. Link Cost Metric With Reliability Assurance
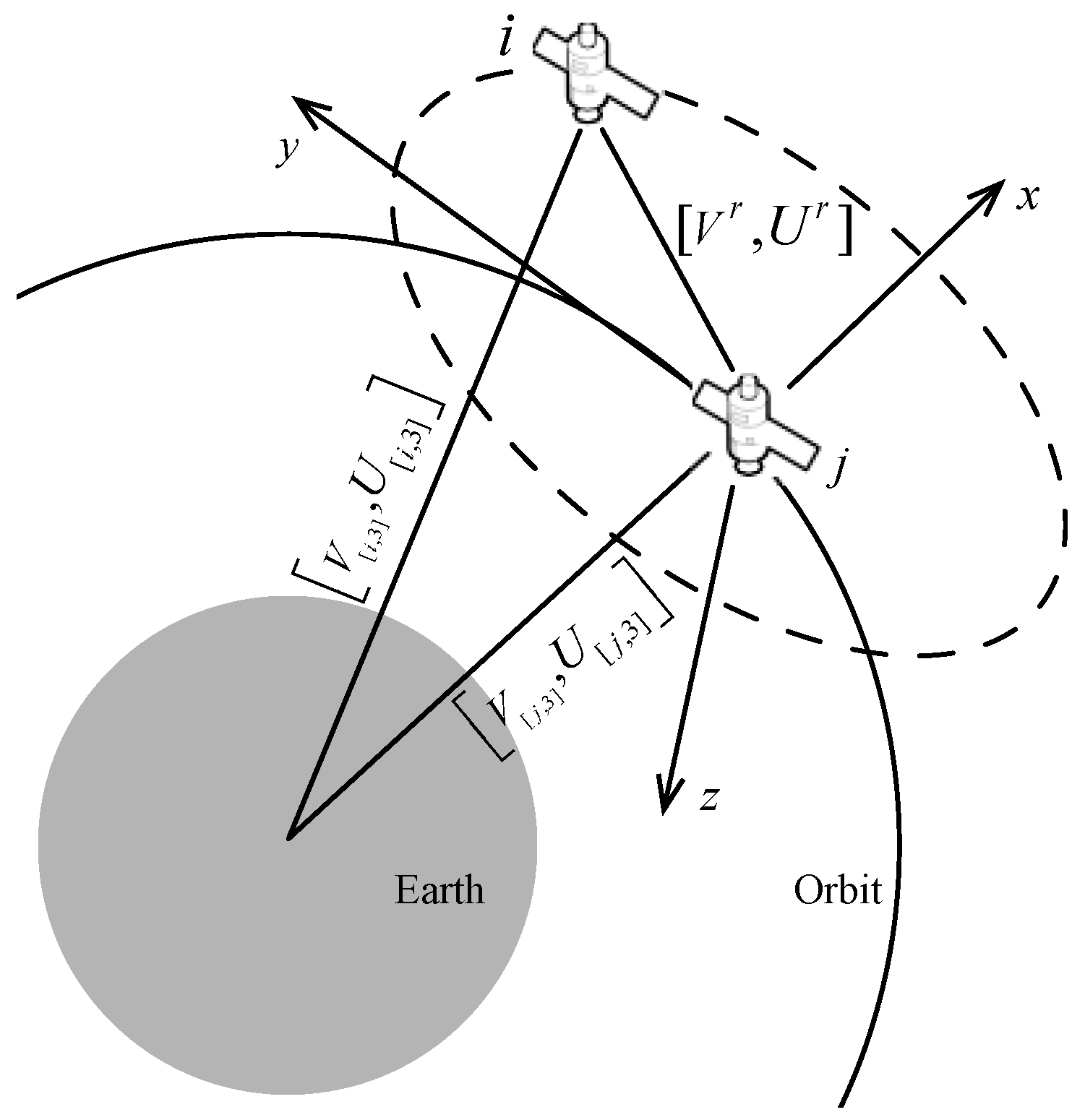
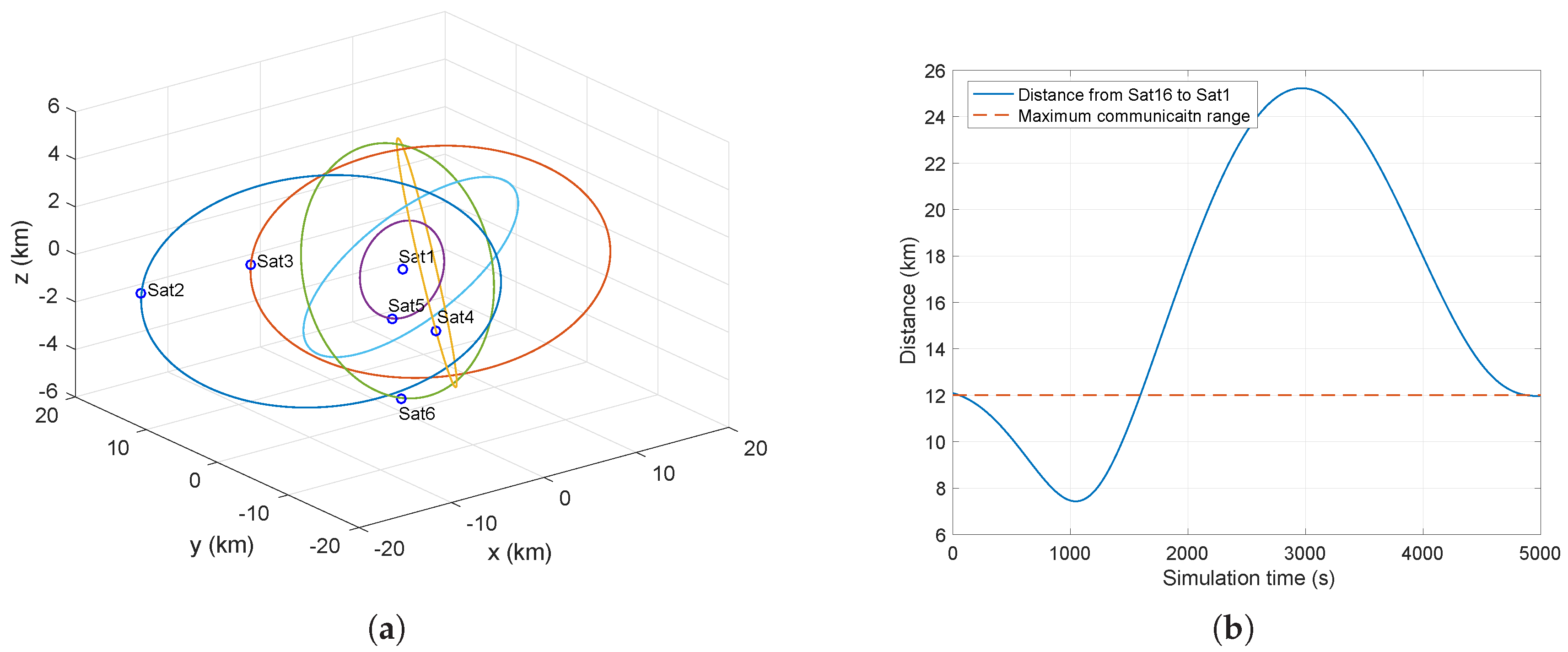
3.1. Satellite Mobility
3.2. Reliability Model for Network With EO Missions
3.3. Link’s Stability Model
4. Reliability Assurance Topology Control Strategy
| Algorithm 1 Reliability-Assured Topology (RAT) | |
| Input: s, g, r and | |
| Output: | |
| 1: | % Sub-step (1,2) |
| 2: | , , , |
| 3: | for to n do |
| 4: | for to m do |
| 5: | in |
| 6: | end for |
| 7: | |
| 8: | Sort into non-decreasing order by the path cost with |
| 9: | Let be the sets of DRS on the paths , respectively |
| 10: | for to m do |
| 11: | if then |
| 12: | in |
| 13: | if then |
| 14: | |
| 15: | end if |
| 16: | else |
| 17: | |
| 18: | end if |
| 19: | end for |
| 20: | |
| 21: | end for |
| 22: | |
| 23: | %Sub-step (3) |
| 24: | if exists isolated satellite then |
| 25: | for any isolated satellite do |
| 26: | Connect the isolated satellite to the nearest and connected satellite and get |
| 27: | end for |
| 28: | end if |
| 29: | return |
5. Example and Discussion
- (1)
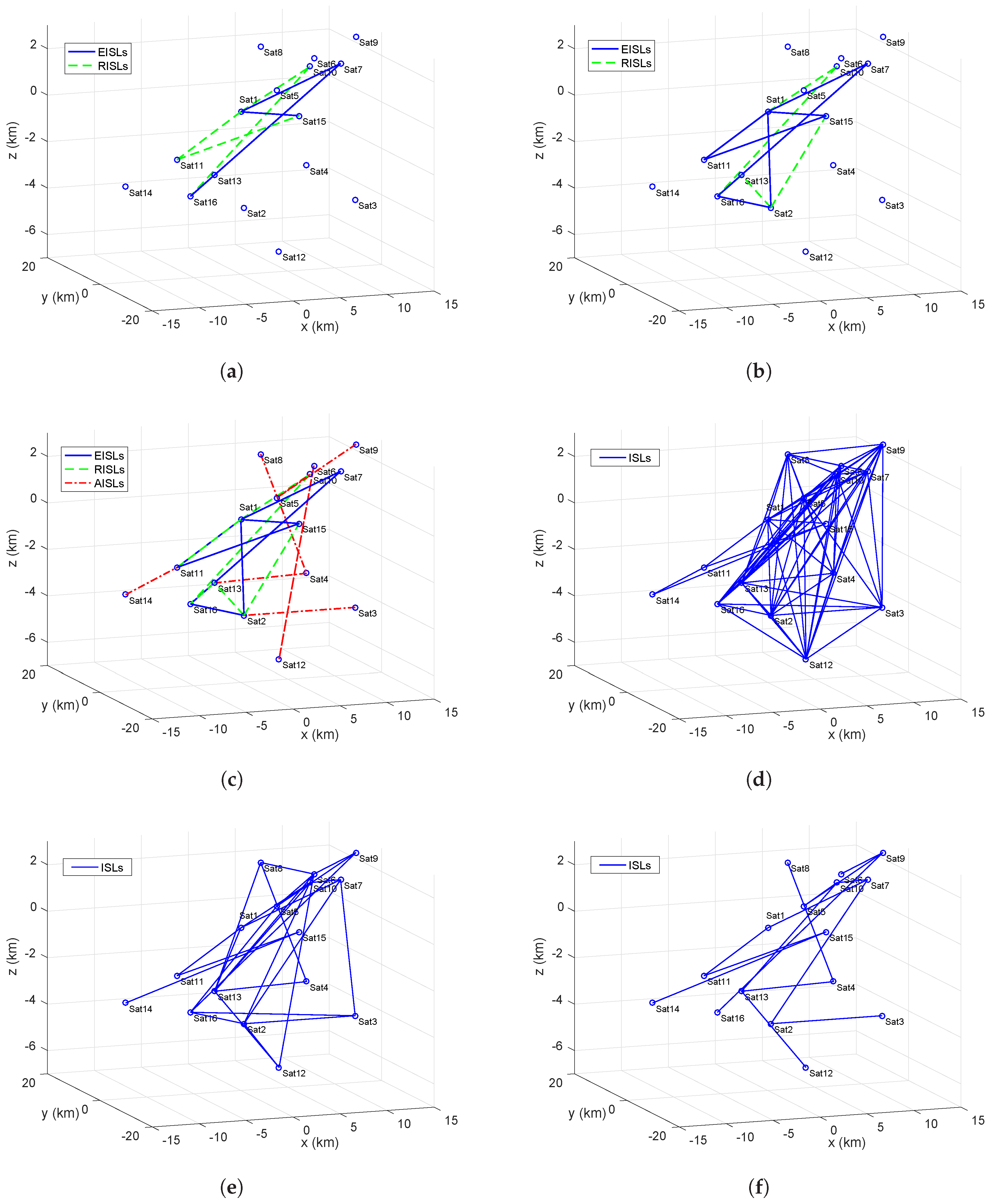
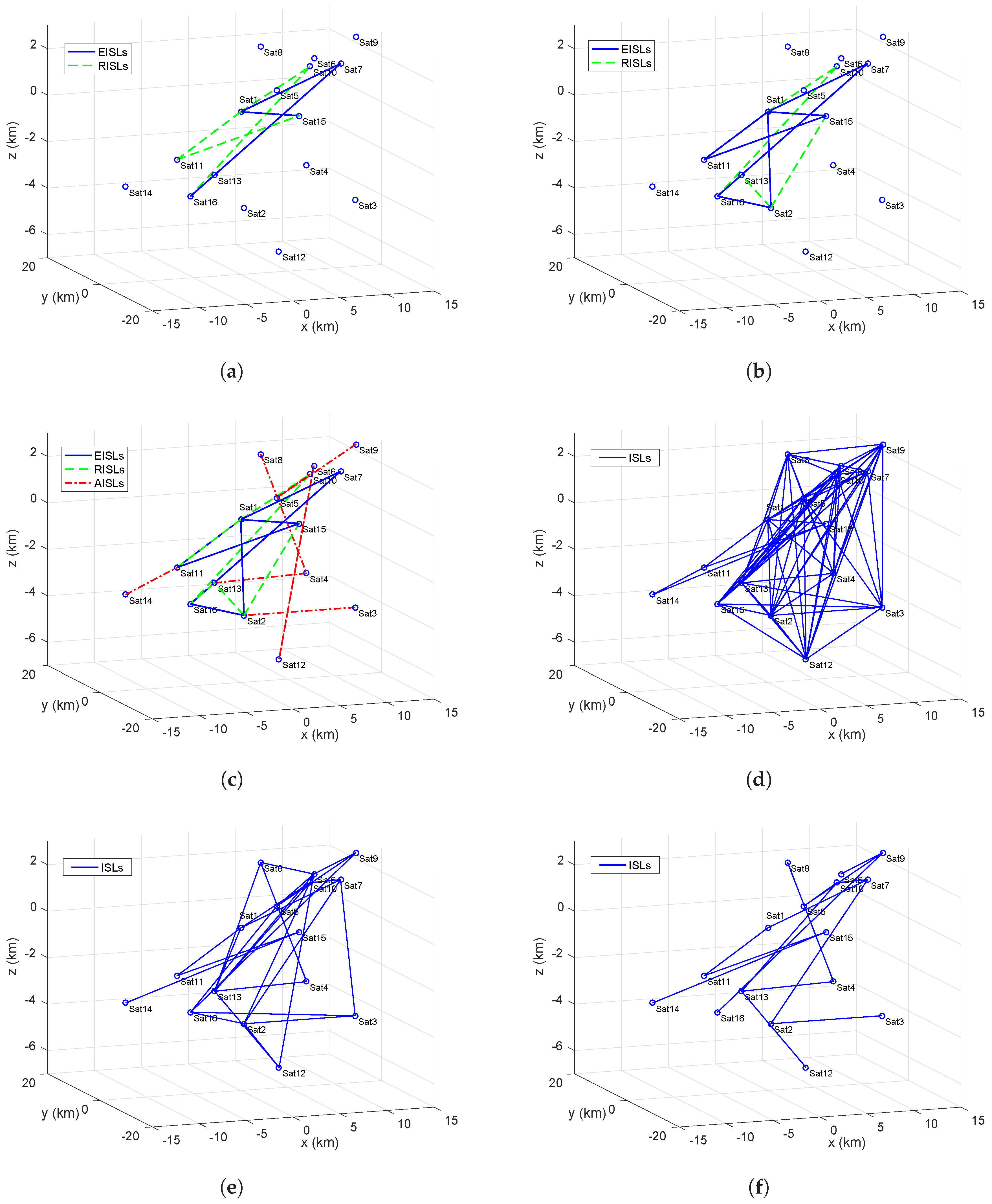
- Figure 7a shows the network topology after applying RAT algorithm Step 1.1–1.3, where the solid links (blue) denote the essential inter-satellite links (EISLs) and the dashed links (green) are the redundant inter-satellite links (RISLs). It is the key topology for Sat1 sending data to Sat15 and 16.
- (2)
- (3)
- Figure 7c is the final topology after applying the RAT algorithm, where the dot-dash links (red) are the additional inter-satellite links (AISLs).
- (4)
- Figure 7d shows the origin of the physical topology without topology control. All nodes communicate with the maximal transmission range.
- (5)
- Figure 7e,f represent the network topologies after using the and MST algorithms.
6. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hamm, N.A.; Magalhaes, R.J.S.; Clements, A.C. Earth Observation, Spatial Data Quality, and Neglected Tropical Diseases. PLoS Negl. Trop. Dis. 2015, 9, e0004164. [Google Scholar] [CrossRef] [PubMed]
- Huang, W.J.; Huang, J.F.; Wang, X.Z.; Wang, F.M.; Shi, J.J. Comparability of Red/Near-Infrared Reflectance and NDVI Based on the Spectral Response Function between MODIS and 30 Other Satellite Sensors Using Rice Canopy Spectra. Sensors 2013, 13, 16023–16050. [Google Scholar] [CrossRef] [PubMed]
- Dong, F.H.; Li, H.J.; Gong, X.W.; Liu, Q.; Wang, J.C. Energy-Efficient Transmissions for Remote Wireless Sensor Networks: An Integrated HAP/Satellite Architecture for Emergency Scenarios. Sensors 2015, 15, 22266–22290. [Google Scholar] [CrossRef] [PubMed]
- Yang, D.T.; Yang, C.Y. Detection of Seagrass Distribution Changes from 1991 to 2006 in Xincun Bay, Hainan, with Satellite Remote Sensing. Sensors 2009, 9, 830–844. [Google Scholar] [CrossRef] [PubMed]
- Young, A. New Rockets and New Launch Methods. In The Twenty-First Century Commercial Space Imperative; Springer: Cham, Swizerland, 2015; pp. 29–42. [Google Scholar]
- Caini, C.; Cruickshank, H.; Farrell, S.; Marchese, M. Delay- and Disruption-Tolerant Networking (DTN): An Alternative Solution for Future Satellite Networking Applications. Proc. IEEE 2011, 99, 1980–1997. [Google Scholar] [CrossRef]
- Prathap, U.; Shenoy, P.D.; Venugopal, K.R.; Patnaik, L.M. Wireless Sensor Networks Applications and Routing Protocols: Survey and Research Challenges. In Proceedings of the International Symposium on Cloud and Services Computing, Shanghai, China, 22–24 November 2012; pp. 49–56.
- Dong, F.; Wang, J.; Yang, J.; Cai, C. Distributed Satellite Cluster Network: A Survey. J. Donghua Univ. 2015, 32, 100–104. [Google Scholar]
- Ganz, A.; Karmi, G. Satellite clusters: A performance study. IEEE Trans. Commun. 1991, 39, 747–757. [Google Scholar] [CrossRef]
- Ganz, A.; Li, B. Design and analysis of satellite clusters. In Proceedings of the Global Telecommunications Conference, GLOBECOM ’91. Countdown to the New Millennium. Featuring a Mini-Theme on: Personal Communications Services, Phoenix, AZ, USA, 2–5 December 1991; pp. 493–497.
- Dong, F.; Li, X.; Yao, Q.; He, Y.; Wang, J. Topology structure design and performance analysis on distributed satellite cluster networks. In Proceedings of the 4th International Conference on Computer Science and Network Technology (ICCSNT), Harbin, China, 19–20 December 2015; pp. 881–884.
- Zhong, X.; He, Y.; Liu, Q.; Wei, X. Power control approach in distributed satellite cluster network based on presetting and prediction. In Proceedings of the IEEE Information Technology, Networking, Electronic and Automation Control Conference, Chongqing, China, 20–22 May 2016; pp. 265–269.
- Wu, J.; Liu, L.; Hu, X. Predictive-Reactive Scheduling for Space Missions in Small Satellite Clusters. In Proceedings of the International Symposium on Computer, Consumer and Control (IS3C), Xi’an, China, 4–6 July 2016; pp. 475–480.
- Long, F.; Xiong, N.X.; Vasilakos, A.V.; Yang, L.T.; Sun, F.C. A sustainable heuristic QoS routing algorithm for pervasive multi-layered satellite wireless networks. Wirel. Netw. 2010, 16, 1657–1673. [Google Scholar] [CrossRef]
- Xiong, N.X.; Vasilakos, A.V.; Yang, L.T.; Song, L.Y.; Pan, Y.; Kannan, R.; Li, Y.S. Comparative Analysis of Quality of Service and Memory Usage for Adaptive Failure Detectors in Healthcare Systems. IEEE J. Sel. Areas Commun. 2009, 27, 495–509. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, G.; Gou, L.; Kong, B.; Bian, D. A Hierarchical Autonomous System Based Topology Control Algorithm in Space Information Network. Ksii Trans. Internet Inf. Syst. 2015, 9, 3572–3593. [Google Scholar]
- Kaplan, L.A. Transmission range control during autonomous node selection for wireless sensor networks. In Proceedings of the IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 6–13 March 2004; pp. 2056–2087.
- Ollero, A.; Lacroix, S.; Merino, L.; Gancet, J.; Wiklund, J.; Remuss, V.; Veiga Perez, I.; Gutierrez, L.G.; Viegas, D.X.; Gonzalez Benitez, M.A.; et al. Multiple eyes in the skies—Architecture and perception issues in the comets unmanned air vehicles project. IEEE Robot. Autom. Mag. 2005, 12, 46–57. [Google Scholar] [CrossRef]
- Bekmezci, I.; Sahingoz, O.K.; Temel, S. Flying Ad-Hoc Networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Blough, D.M.; Leoncini, M.; Resta, G.; Santi, P. The k-Neighbors Approach to Interference Bounded and Symmetric Topology Control in Ad Hoc Networks. IEEE Trans. Mob. Comput. 2006, 5, 1267–1282. [Google Scholar] [CrossRef]
- Burkhart, M.; Von Rickenbach, P.; Wattenhofer, R.; Zollinger, A. Does topology control reduce interference? In Proceedings of the 5th ACM International Symposium on Mobile Ad Hoc NETWORKING and Computing, Tokyo, Japan, 24–26 May 2004; pp. 9–19.
- Li, N.; Hou, J.C. Localized fault-tolerant topology control in wireless ad hoc networks. IEEE Trans. Parallel Distrib. Syst. 2006, 17, 307–320. [Google Scholar] [CrossRef]
- Zhang, C.M.; Wan, S.L.; Yao, Z.; Zhang, B.X.; Li, C. A distributed battery recovery aware topology control algorithm for wireless sensor networks. Wirel. Commun. Mob. Comput. 2016, 16, 2895–2906. [Google Scholar] [CrossRef]
- Wang, Y.; Li, F.; Dahlberg, T.A. Energy-efficient topology control for three-dimensional sensor networks. Int. J. Sens. Netw. 2008, 4, 68–78. [Google Scholar] [CrossRef]
- Wattenhofer, R.; Li, L.; Bahl, P.; Wang, Y.M. Distributed topology control for power efficient operation in multihop wireless ad hoc networks. In Proceedings of the IEEE INFOCOM, Anchorage, AK, USA, 23–27 April 2001; pp. 1388–1397.
- Heinzelman, W.B.; Chandrakasan, A.P.; Balakrishnan, H. An application-specific protocol architecture for wireless microsensor networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef]
- Kapila, V.; Sparks, A.G.; Buffington, J.M.; Yan, Q. Spacecraft formation flying: Dynamics and control. J. Guid. Control Dyn. 1999, 6, 4137–4141. [Google Scholar] [CrossRef]
- Macias, E.; Suarez, A.; Lloret, J. Mobile sensing systems. Sensors 2013, 13, 17292–17321. [Google Scholar] [CrossRef] [PubMed]
- Urdiales, C.; Aguilera, F.; Gonzalez-Parada, E.; Cano-Garcia, J.; Sandoval, F. Rule-Based vs. Behavior-Based Self-Deployment for Mobile Wireless Sensor Networks. Sensors 2016, 16, 1047. [Google Scholar] [CrossRef] [PubMed]
- Dang, Z.; Wang, Z.; Zhang, Y. Modeling and Analysis of the Bounds of Periodical Satellite Relative Motion. J. Guid. Control Dyn. 2014, 37, 1984–1998. [Google Scholar] [CrossRef]
- Dang, Z.H. Optimal network topology of relative navigation and communication for navigation sharing in fractionated spacecraft cluster. Adv. Space Res. 2013, 52, 1047–1062. [Google Scholar] [CrossRef]
- Simmons, A.; Fellous, J.L.; Ramaswamy, V.; Trenberth, K.; Asrar, G.; Balmaseda, M.; Burrows, J.P.; Ciais, P.; Drinkwater, M.; Friedlingstein, P.; et al. Observation and integrated Earth-system science: A roadmap for 2016-2025. Adv. Space Res. 2016, 57, 2037–2103. [Google Scholar] [CrossRef]
- Guo, H.; Dou, C.; Zhang, X.; Han, C.; Yue, X. Earth observation from the manned low Earth orbit platforms. ISPRS J. Photogramm. Remote Sens. 2016, 115, 103–118. [Google Scholar] [CrossRef]
- Kaku, K.; Aso, N.; Takiguchi, F. Space-based response to the 2011 Great East Japan Earthquake: Lessons learnt from JAXA’s support using earth observation satellites. Int. J. Disaster Risk Reduct. 2015, 12, 134–153. [Google Scholar] [CrossRef]
- Hu, X.S.; Gong, S.P. Flexibility influence on passive stability of a spinning solar sail. Aerosp. Sci. Technol. 2016, 58, 60–70. [Google Scholar] [CrossRef]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations; Clarendon Press: Oxford, UK, 2010; pp. 153–170. [Google Scholar]
- OMNET++ 5.0. 2016. Available online: https://omnetpp.org (accessed on 24 July 2016).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| ISLs bandwidth | 10 Mb/s |
| ISLs queue type | FIFO |
| ISLs queue length | 100 Packets |
| Simulation duration | 5000 s |
| Size of packet | 512 Bytes |
| Terminal bitrate | 8 Mbps |
| Maximum communication range | 12 km |
| Orbit Elements | Values |
|---|---|
| Semi-major Axis | 6778.14 km |
| Eccentricity | 0 |
| Inclination | 97.0346 deg |
| Argument of Perigee | 0 deg |
| RAAN | 279.066 deg |
| True Anomaly | 0 deg |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Zhang, J.; Hu, Z. A Topology Control Strategy with Reliability Assurance for Satellite Cluster Networks in Earth Observation. Sensors 2017, 17, 445. https://doi.org/10.3390/s17030445
Chen Q, Zhang J, Hu Z. A Topology Control Strategy with Reliability Assurance for Satellite Cluster Networks in Earth Observation. Sensors. 2017; 17(3):445. https://doi.org/10.3390/s17030445
Chicago/Turabian StyleChen, Qing, Jinxiu Zhang, and Ze Hu. 2017. "A Topology Control Strategy with Reliability Assurance for Satellite Cluster Networks in Earth Observation" Sensors 17, no. 3: 445. https://doi.org/10.3390/s17030445