
The Shock Pulse Index and Its Application in the Fault Diagnosis of Rolling Element Bearings

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theoretical Background
2.1. Teager Energy Opertor
2.2. Maximum Correlated Kurtosis Deconvolution
2.3. Shock Pulse Index
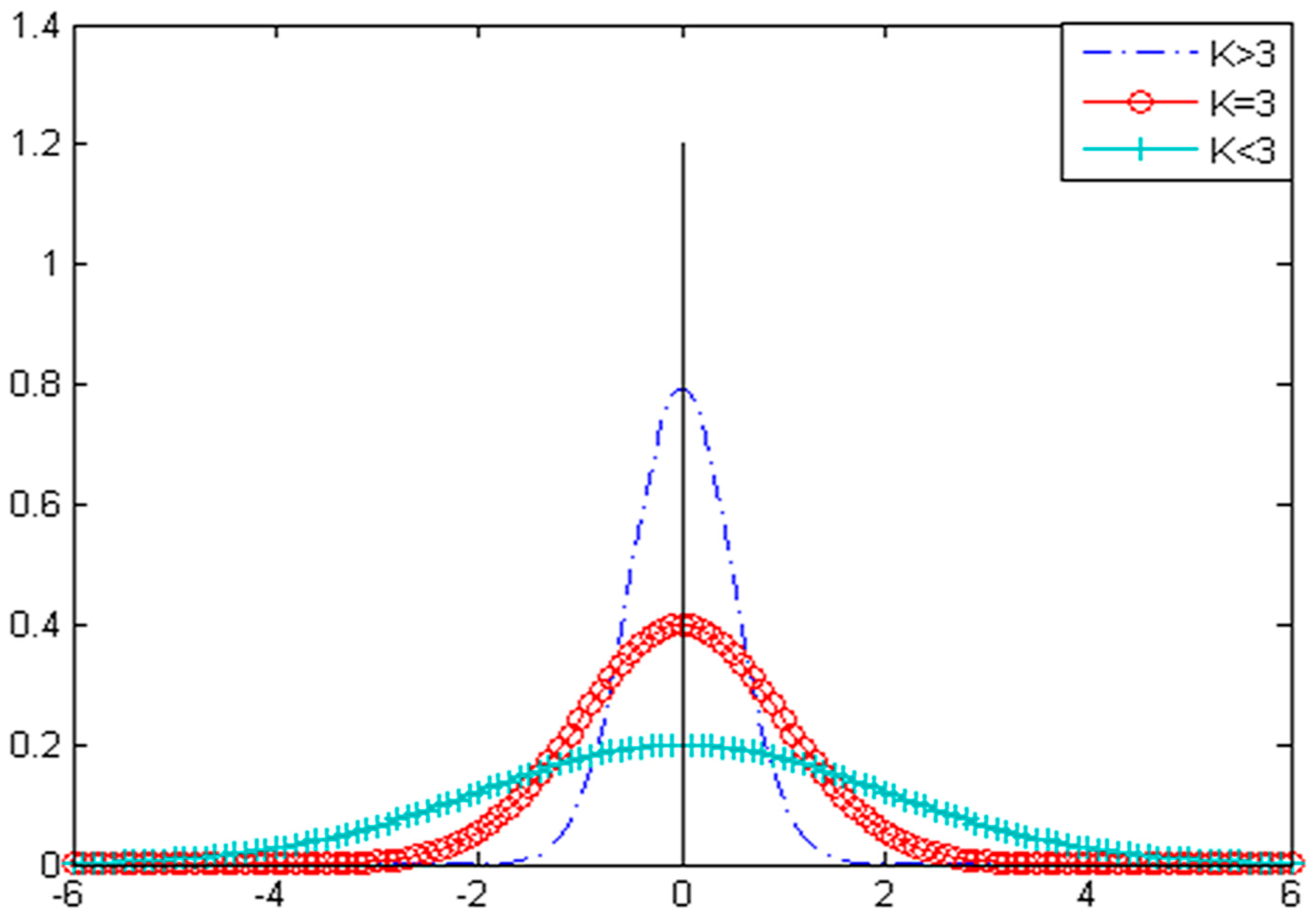
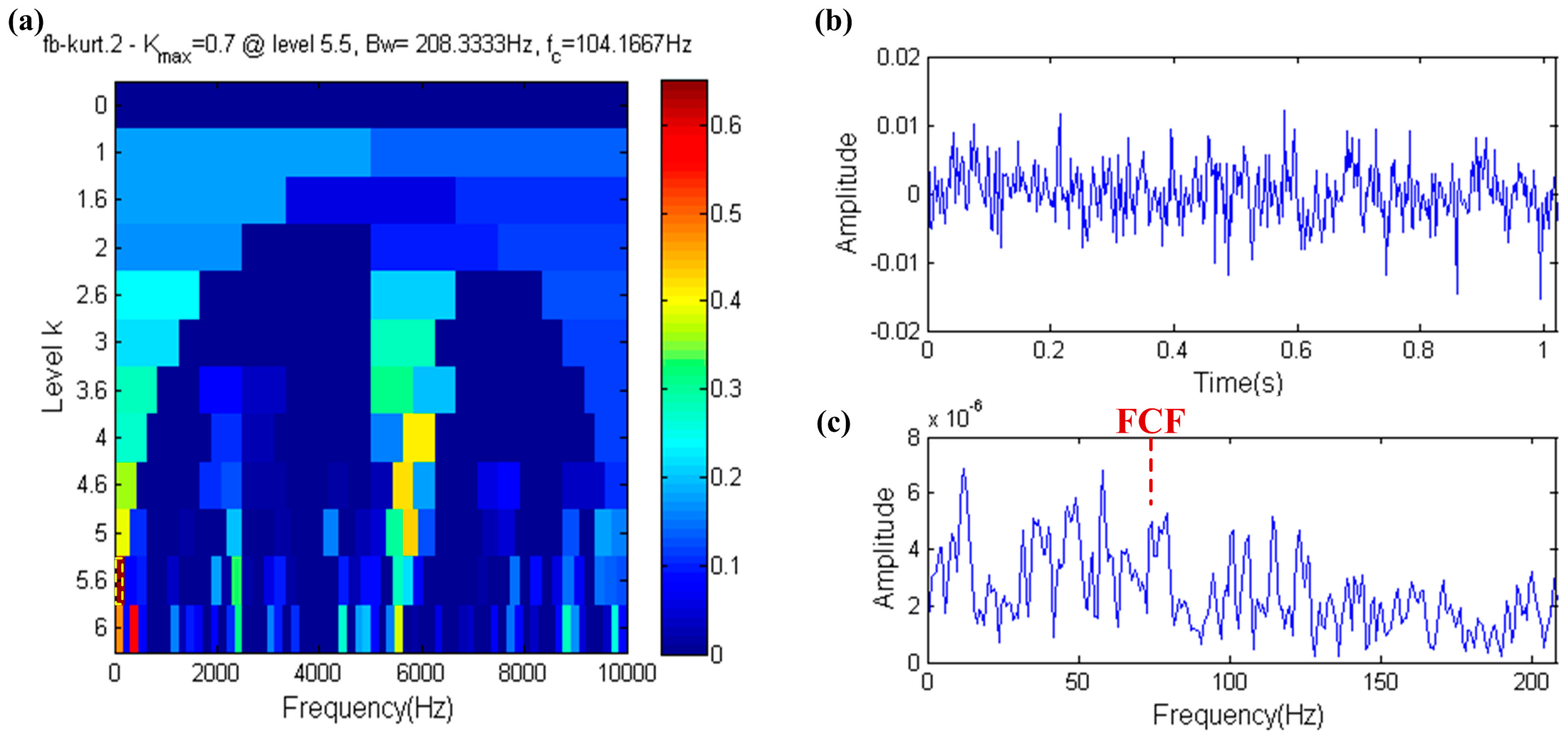
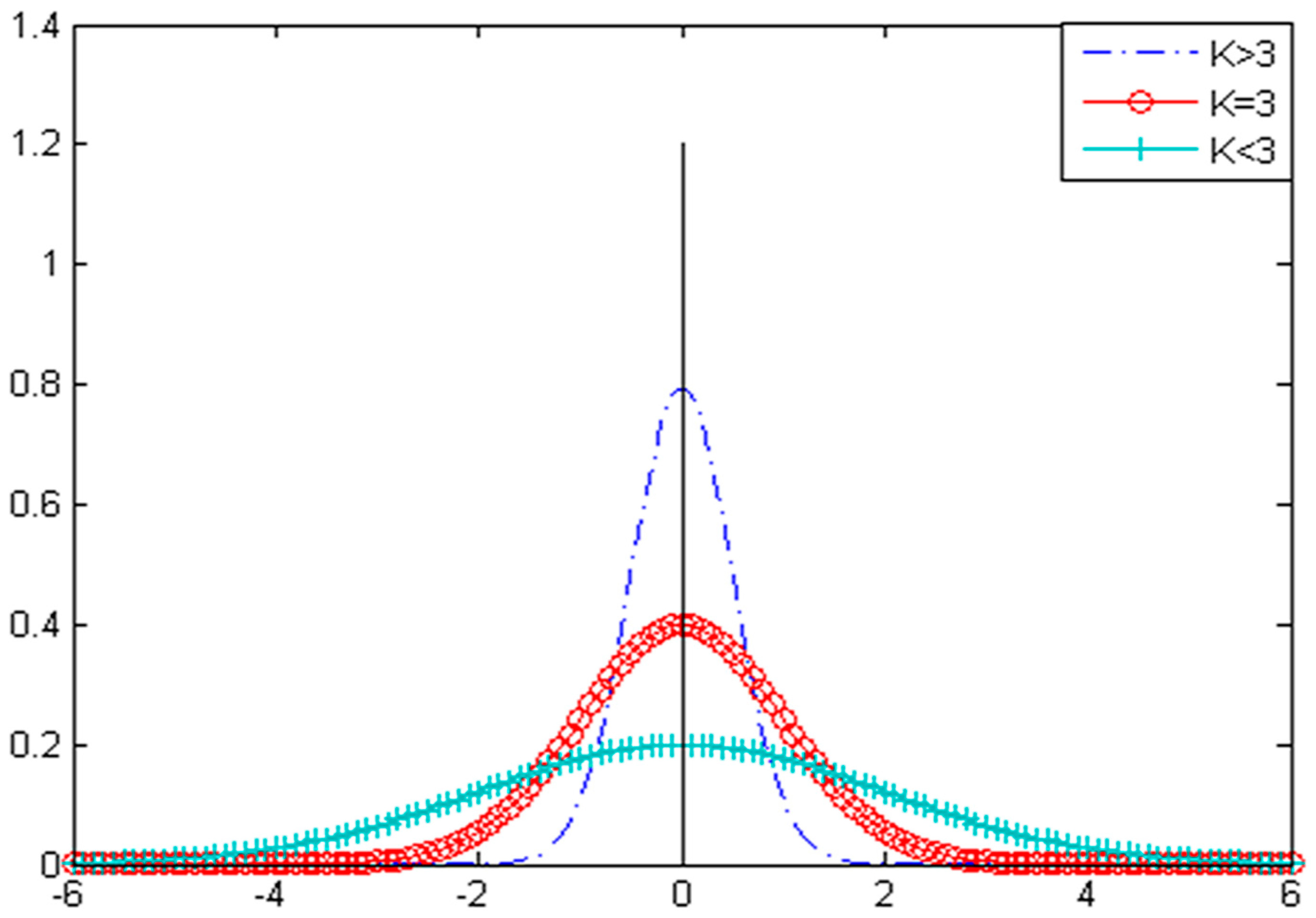
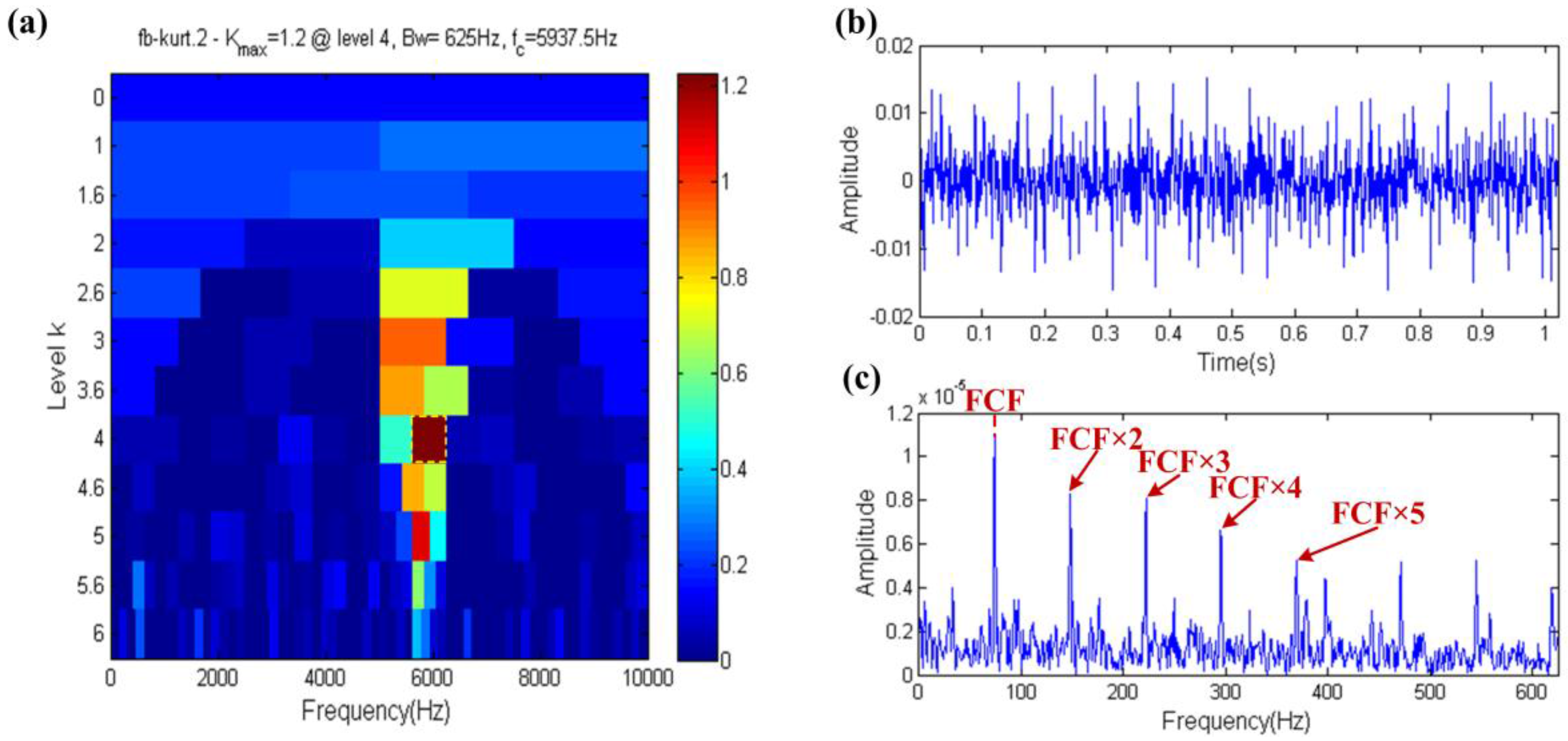
2.3.1. Kurtosis
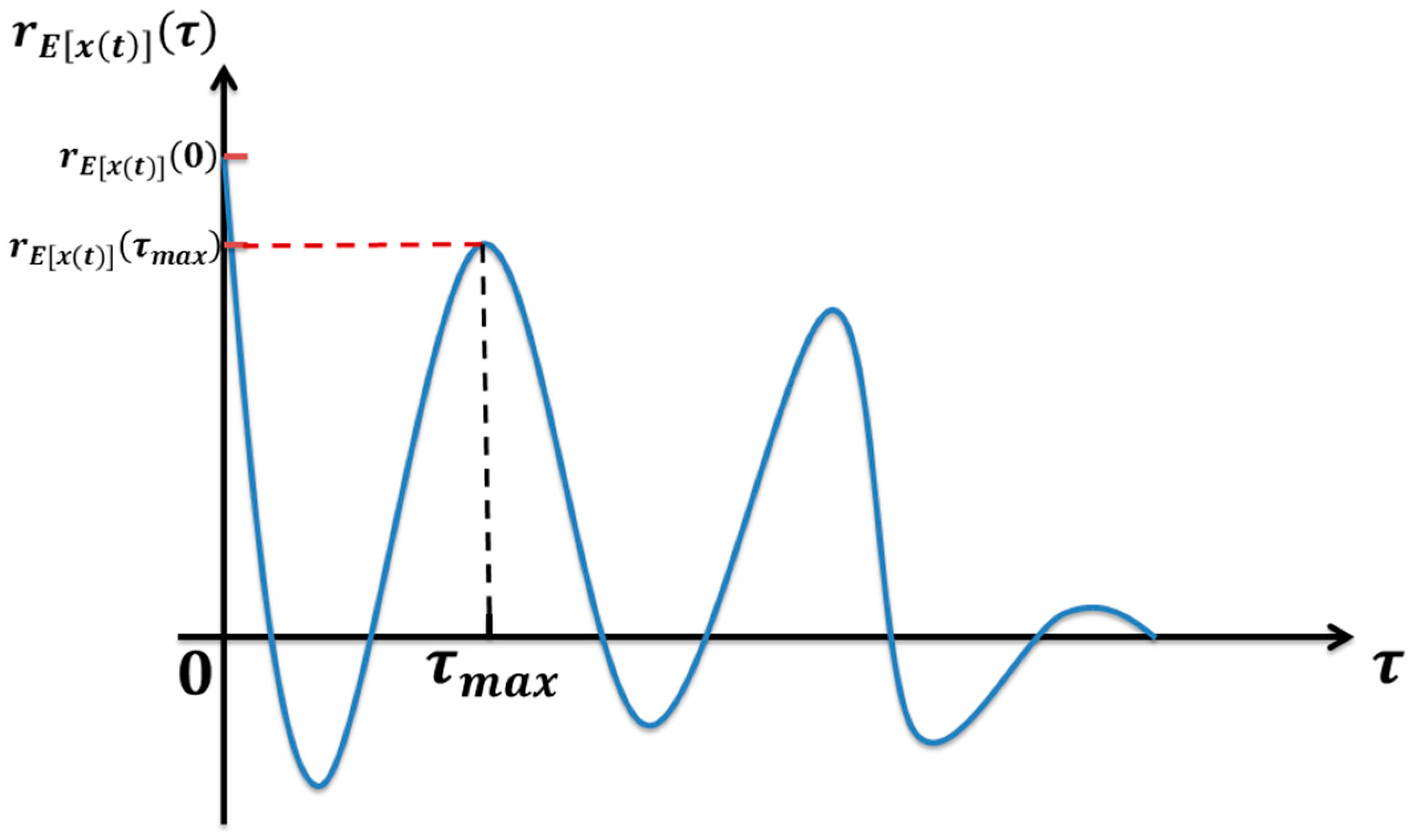
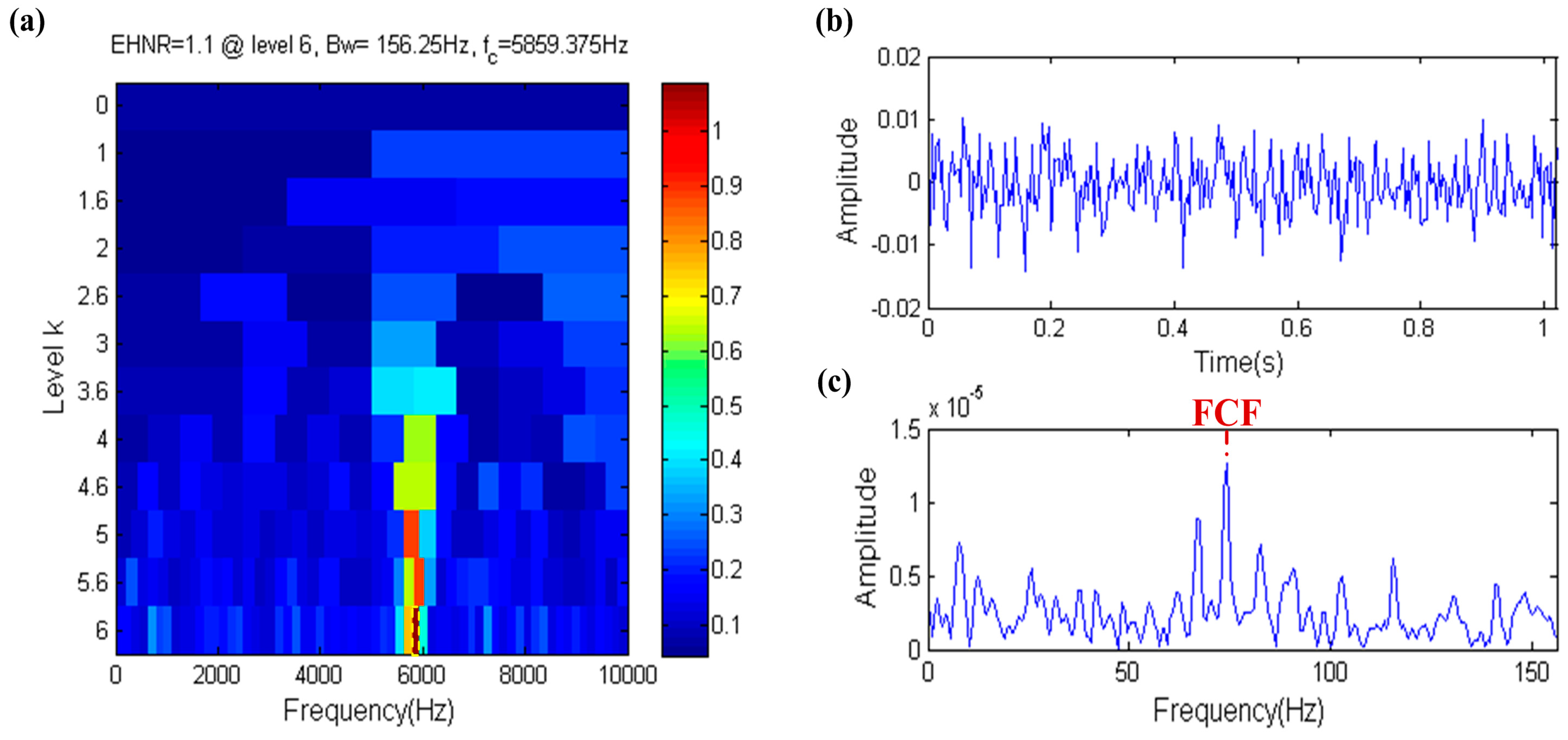
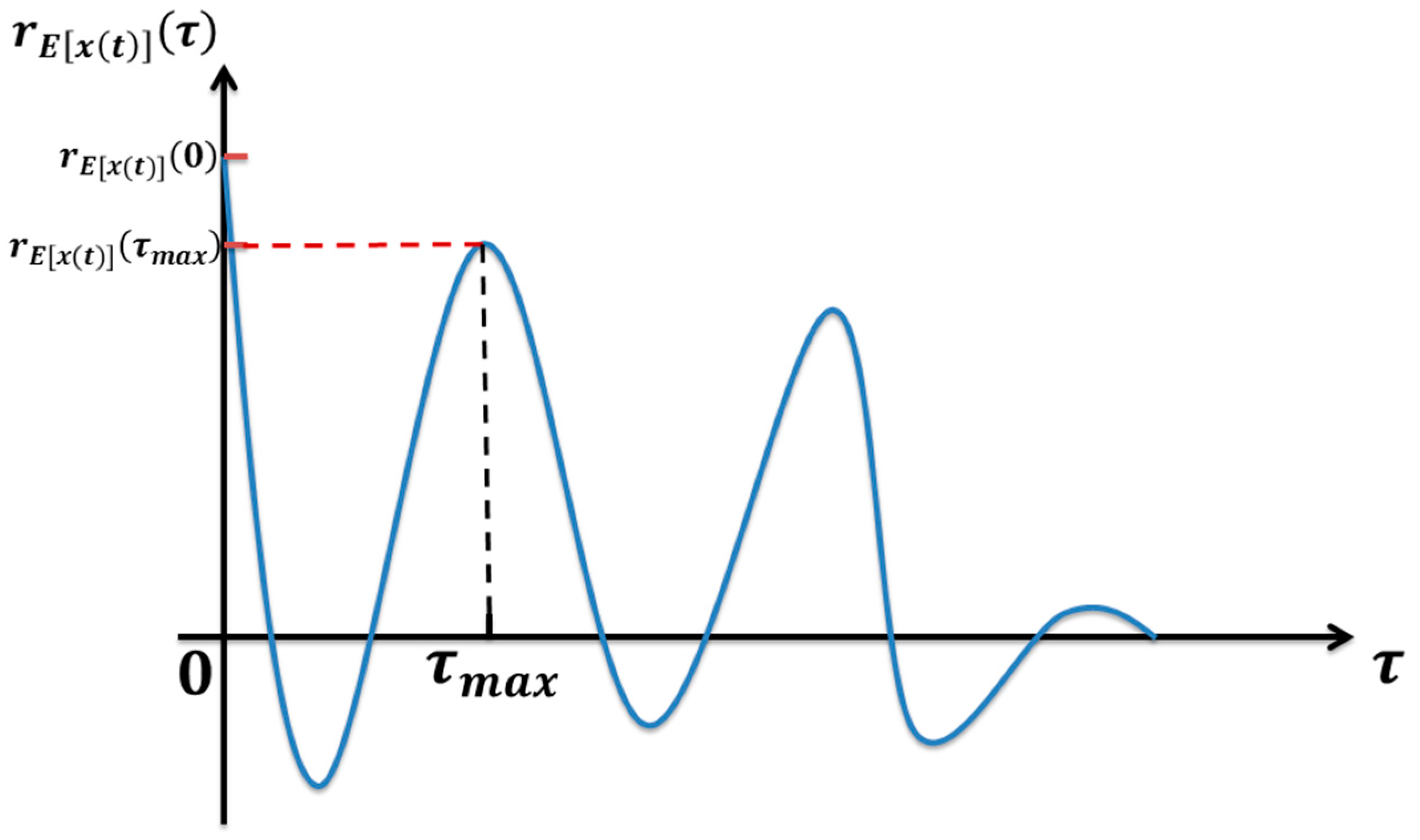
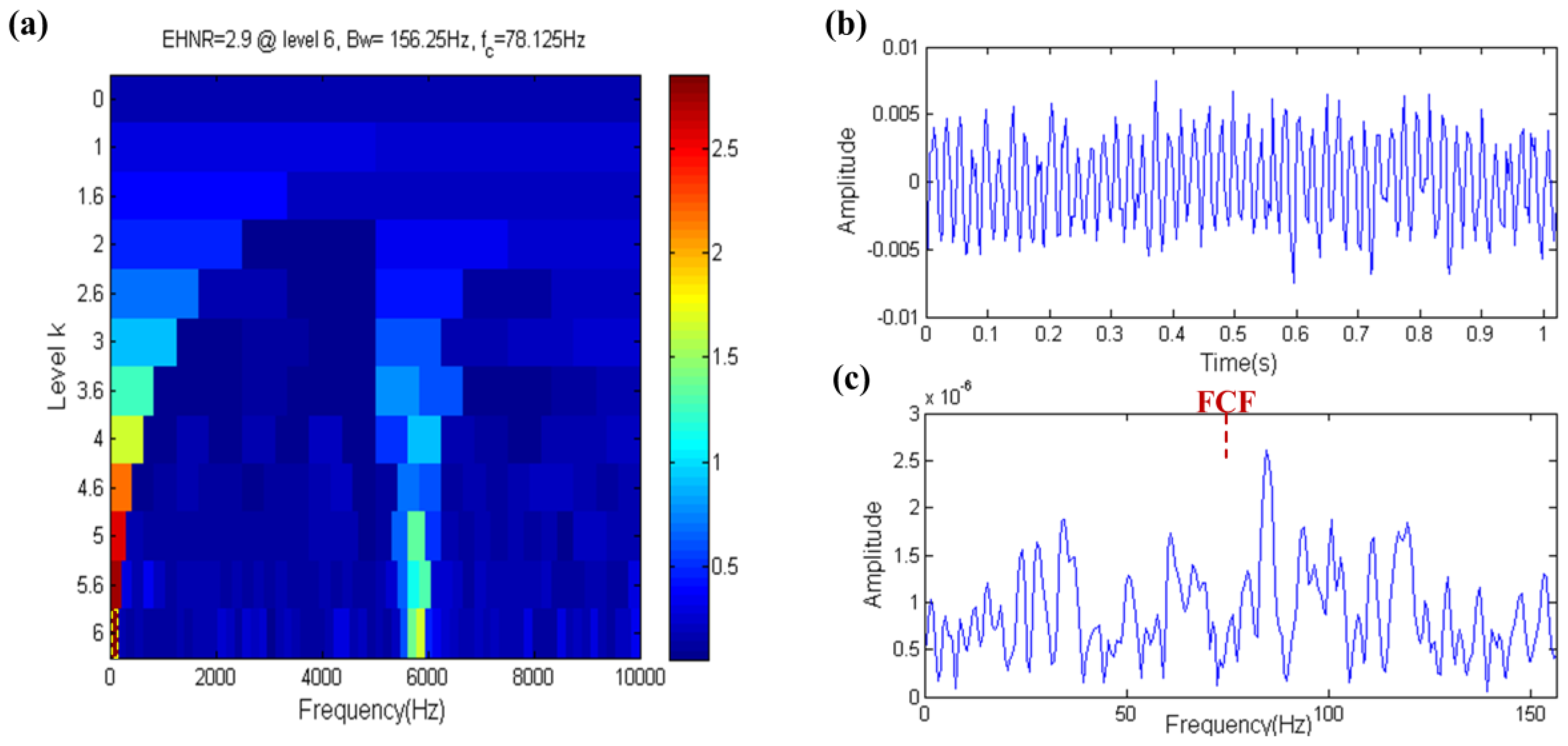
2.3.2. Envelope Harmonic-To-Noise Ratio
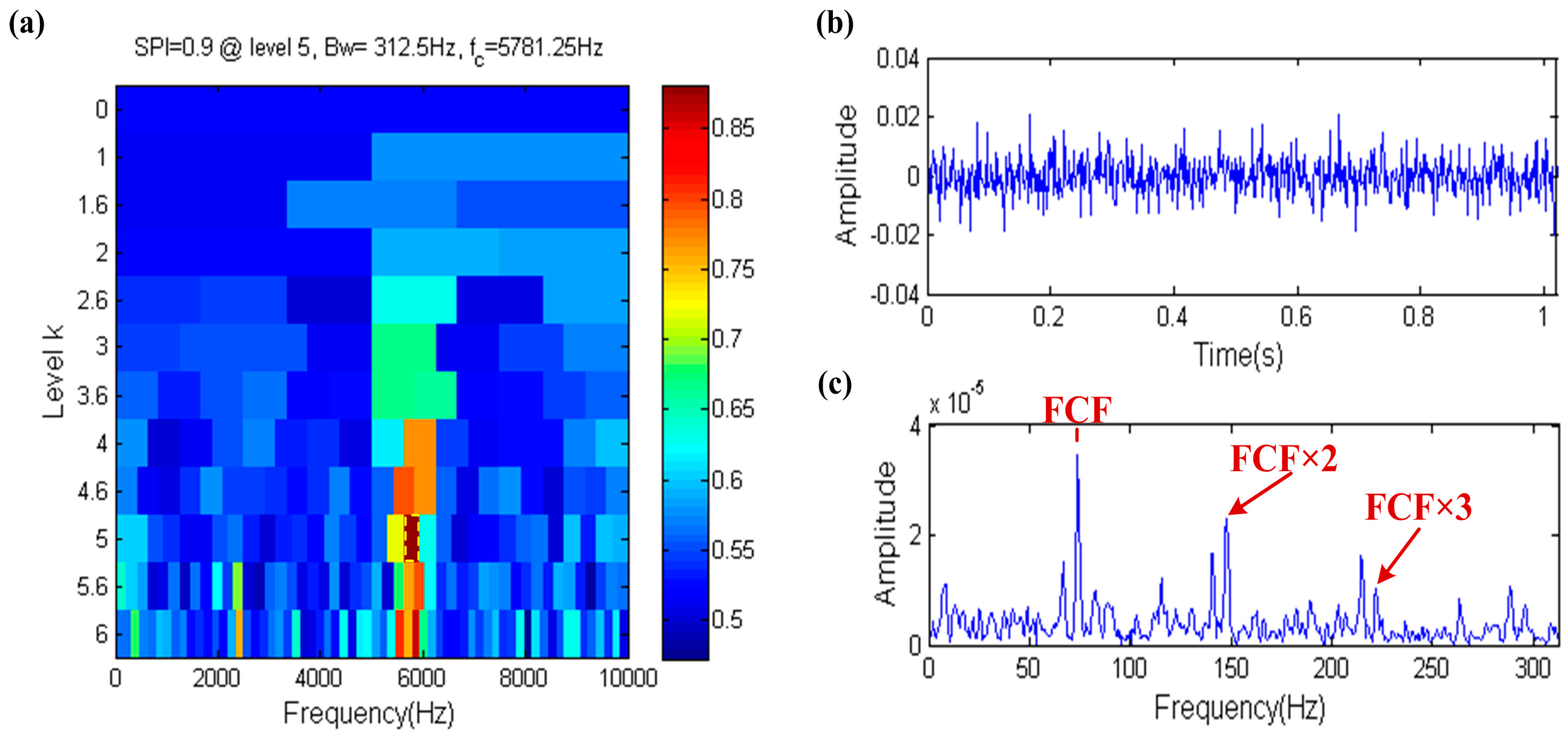
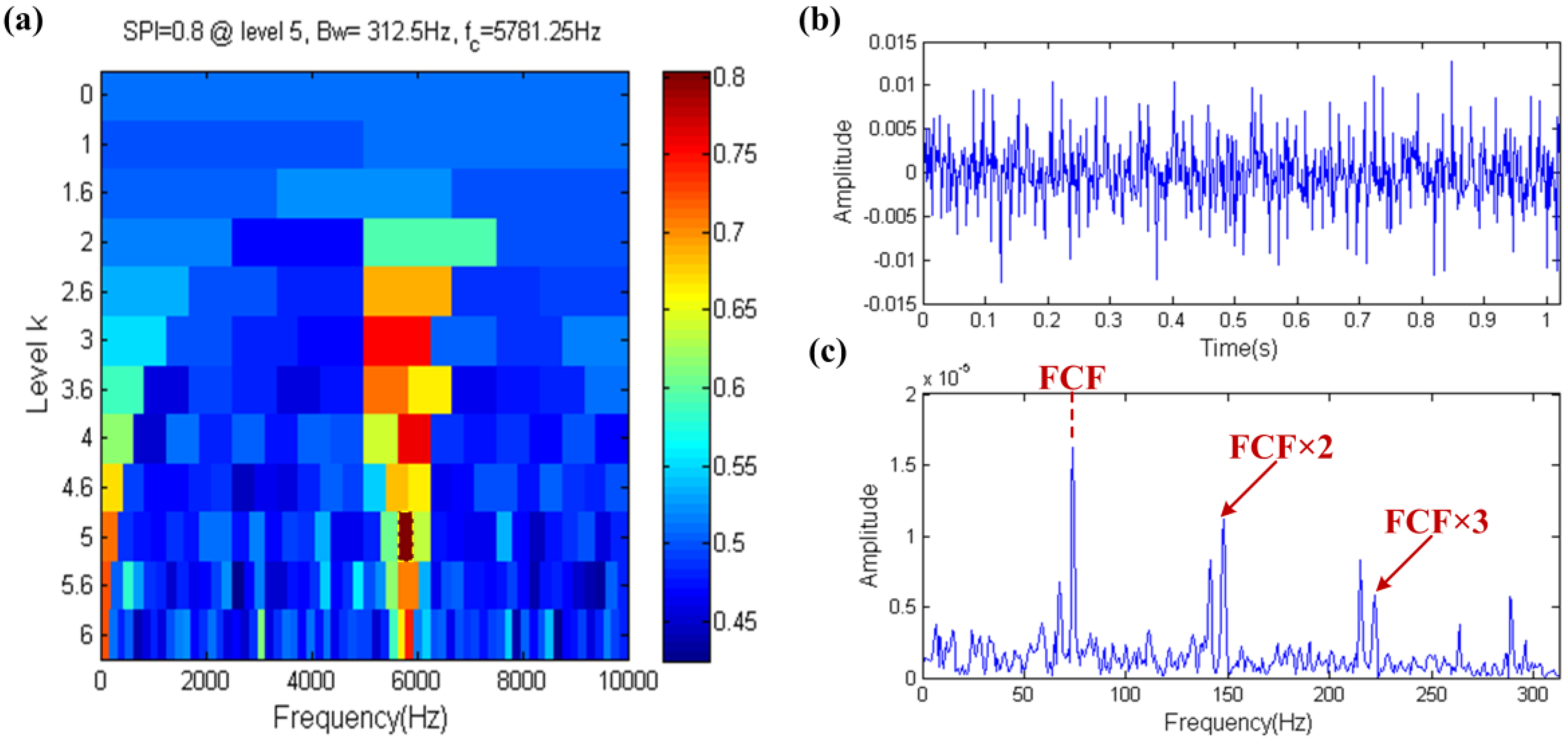
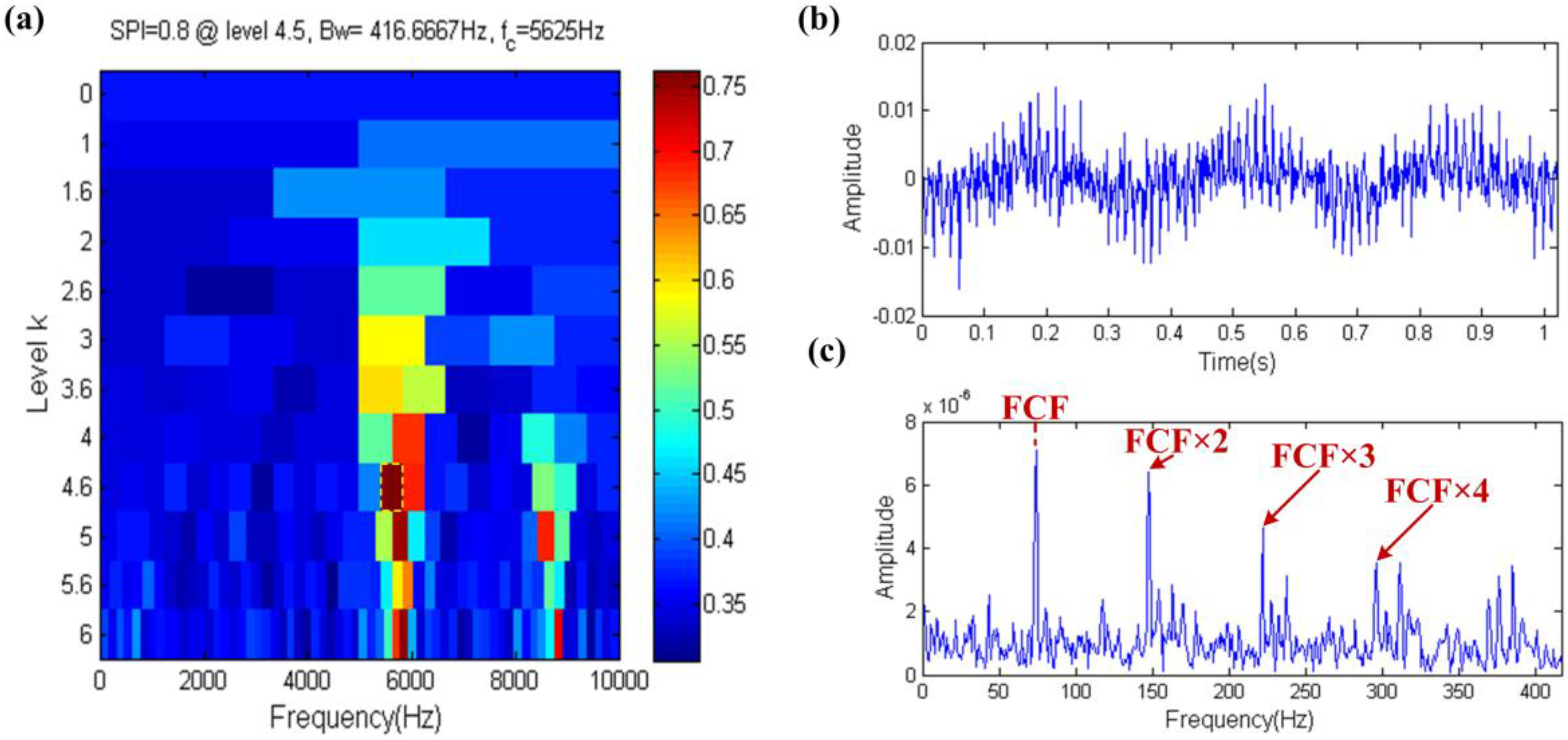
2.3.3. Shock Pulse Index
3. Properties of the SPI
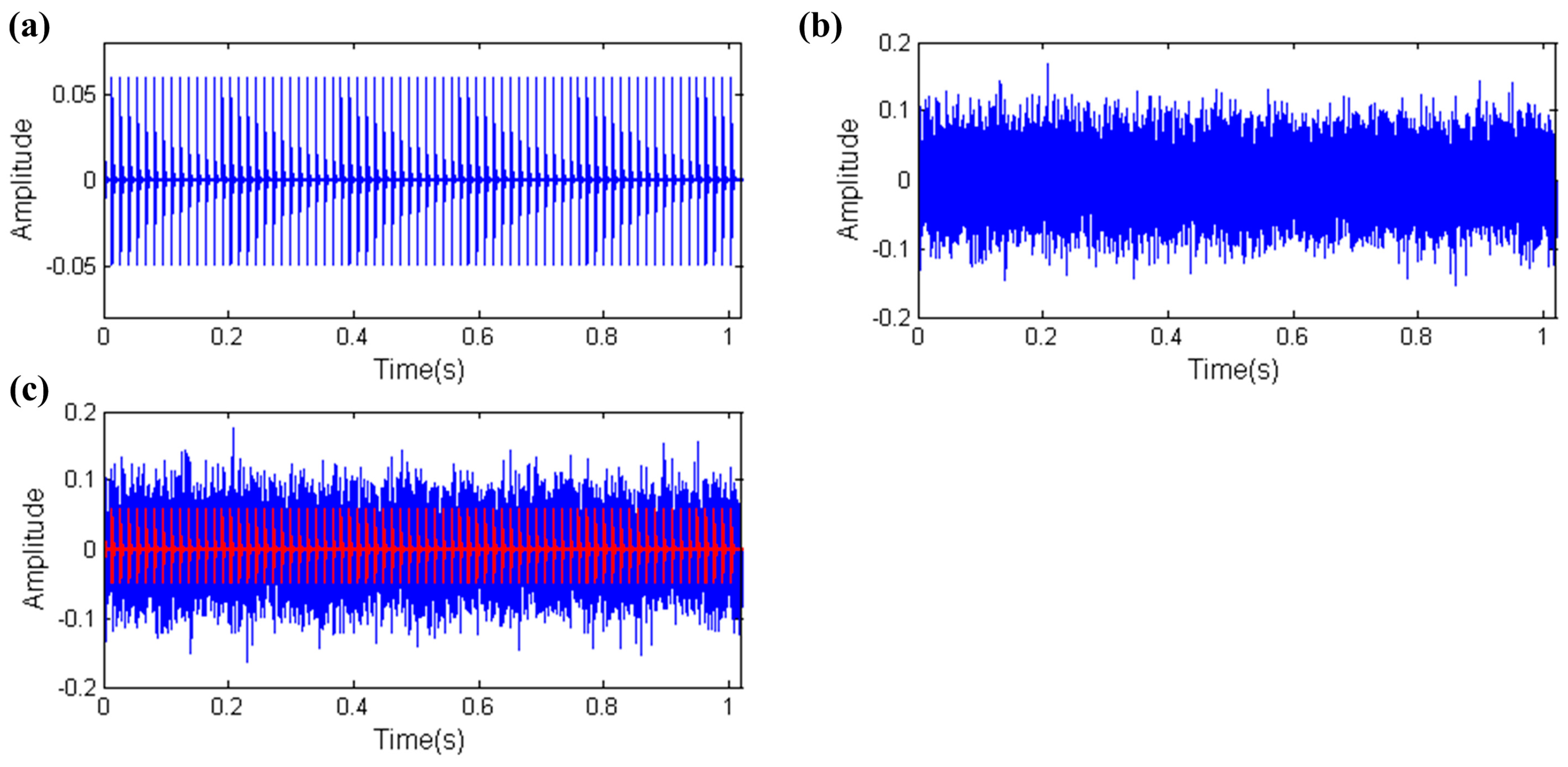
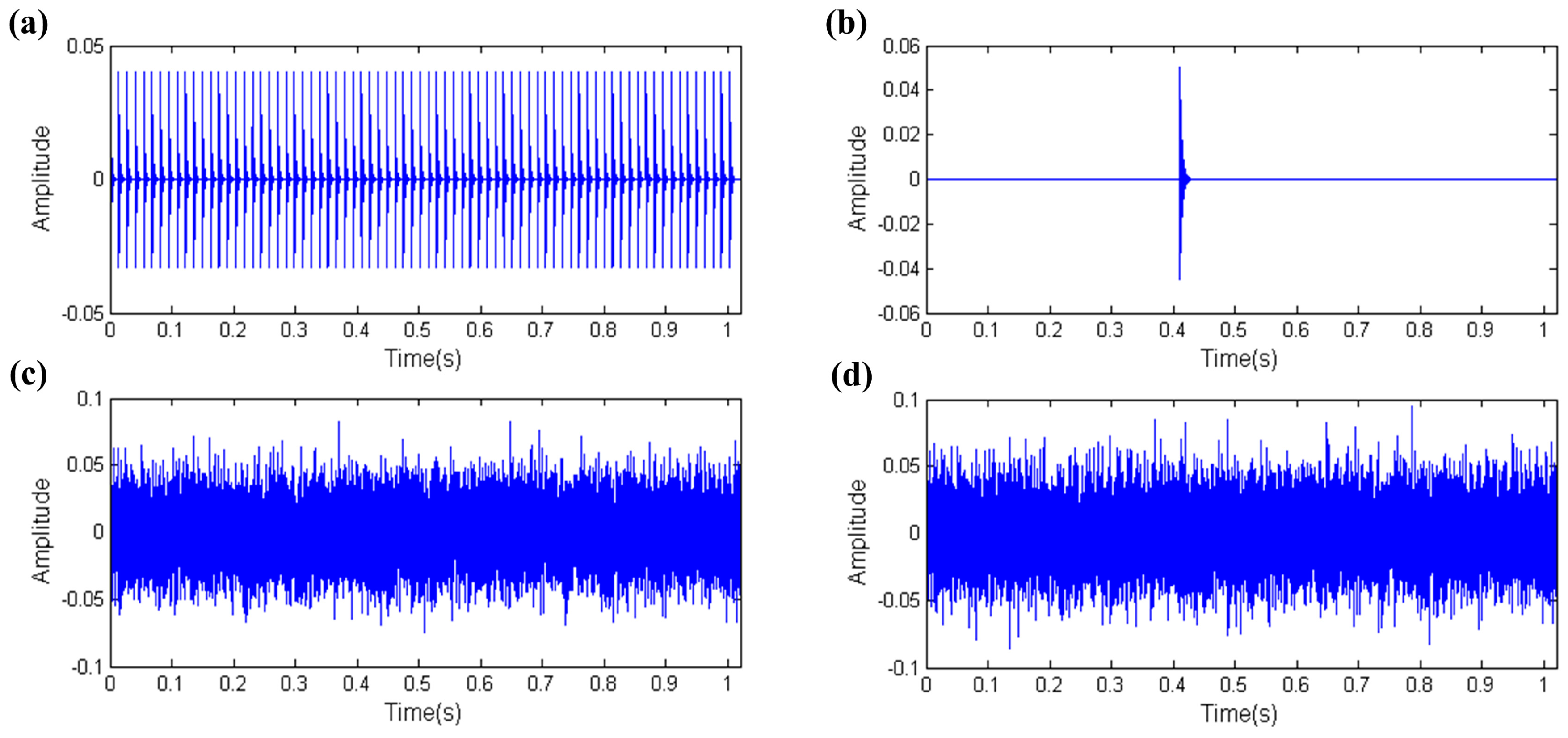
3.1. Capability of Distinguishing Fault Information under High Background Noise
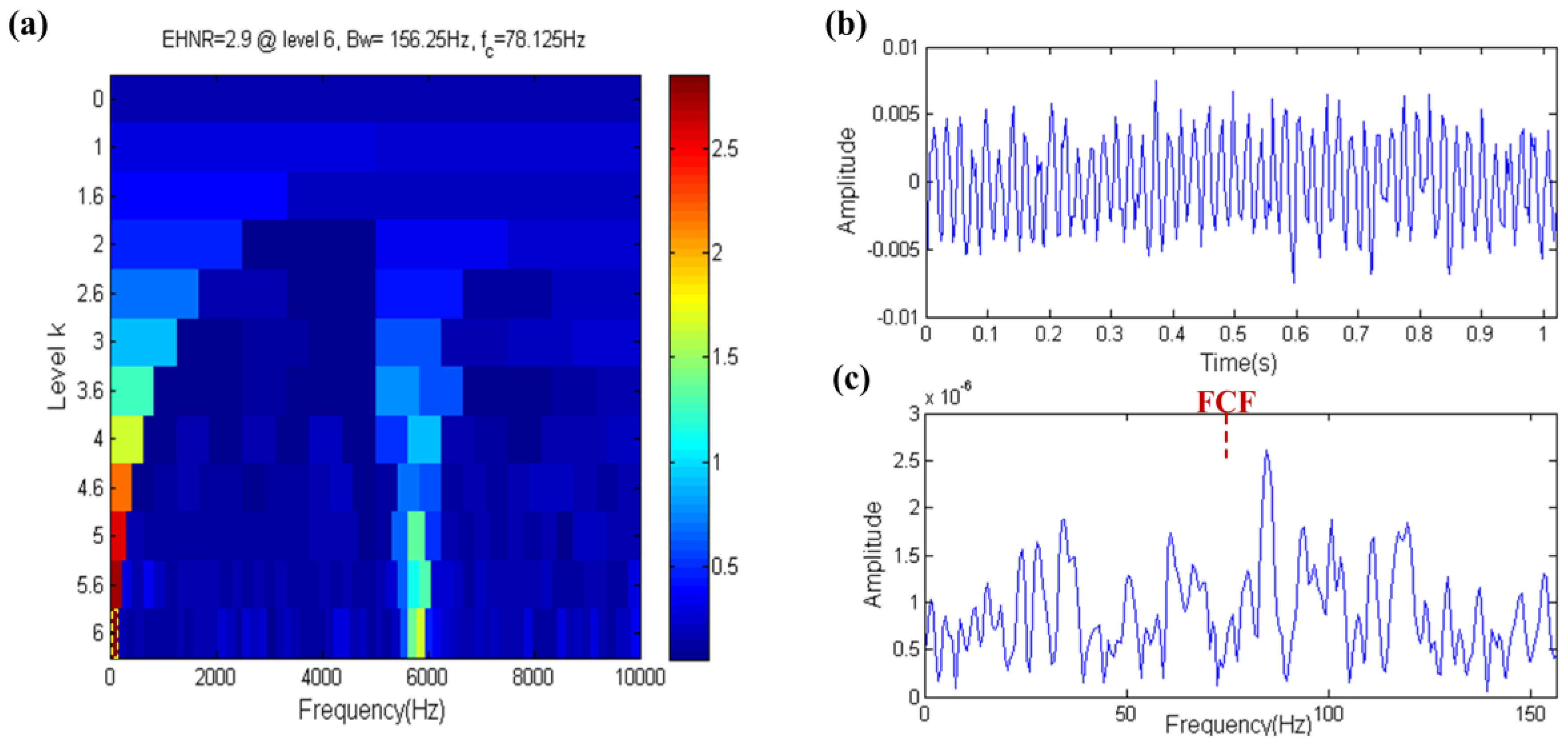
3.2. Capability of Distinguishing Fault Impulses and Other Harmonic Components
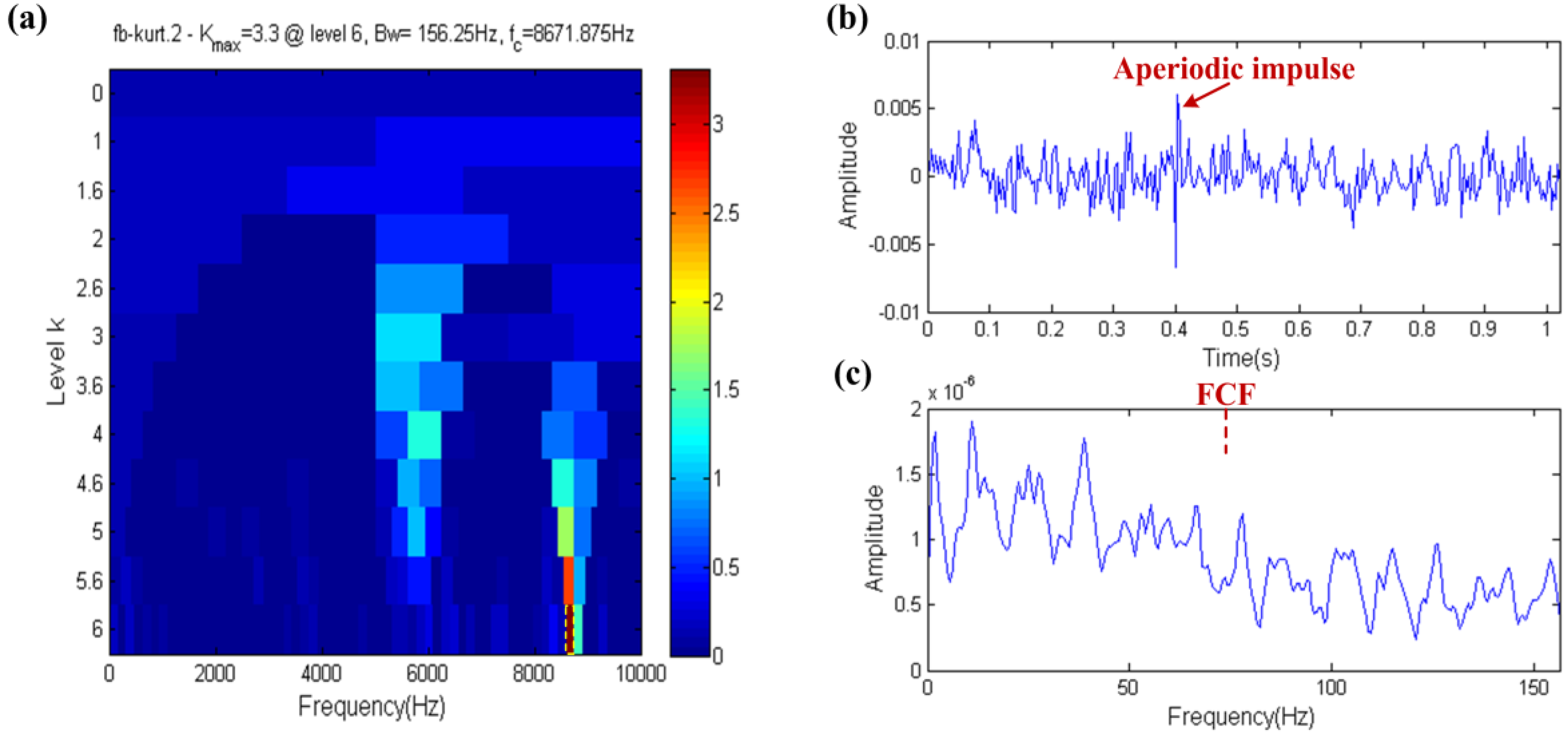
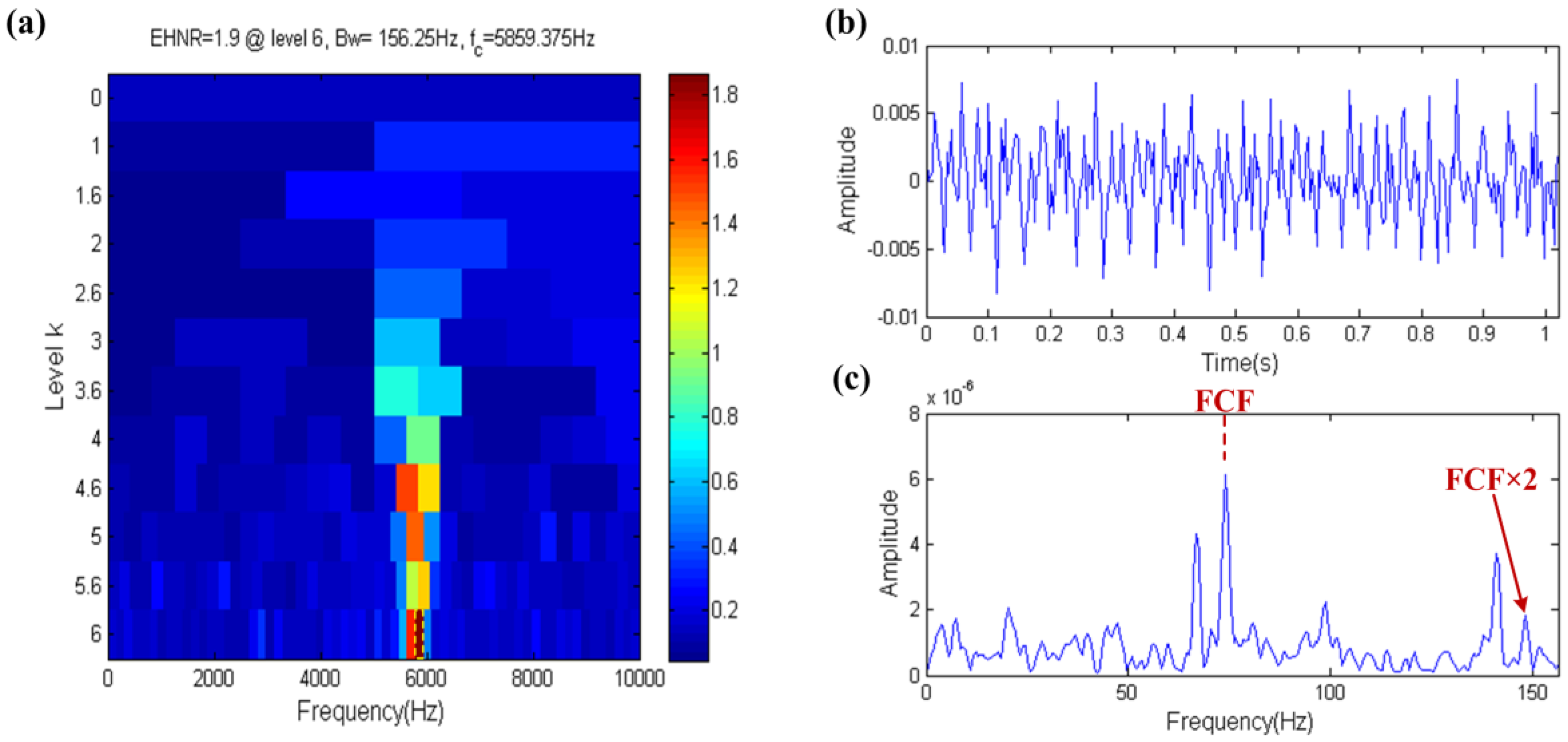
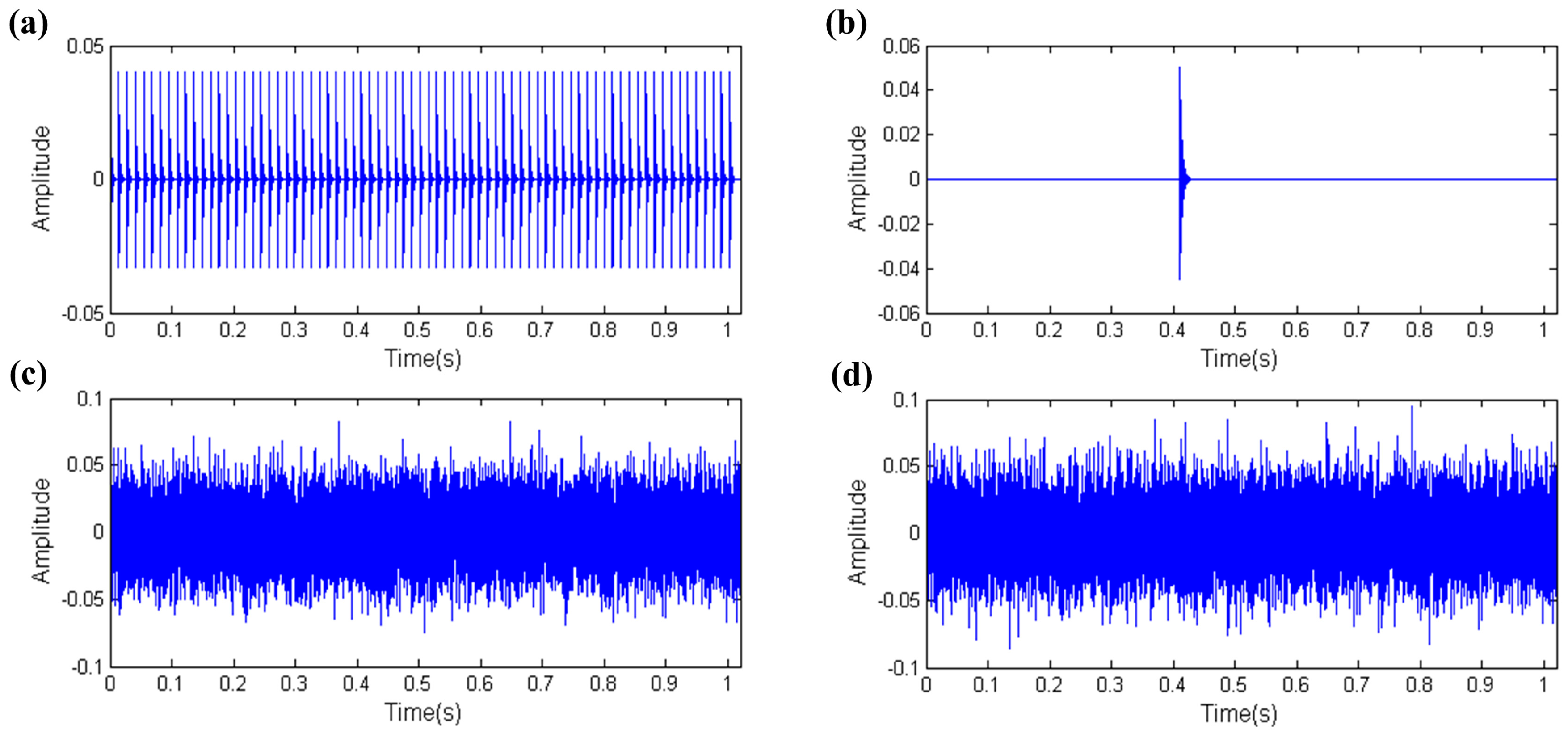
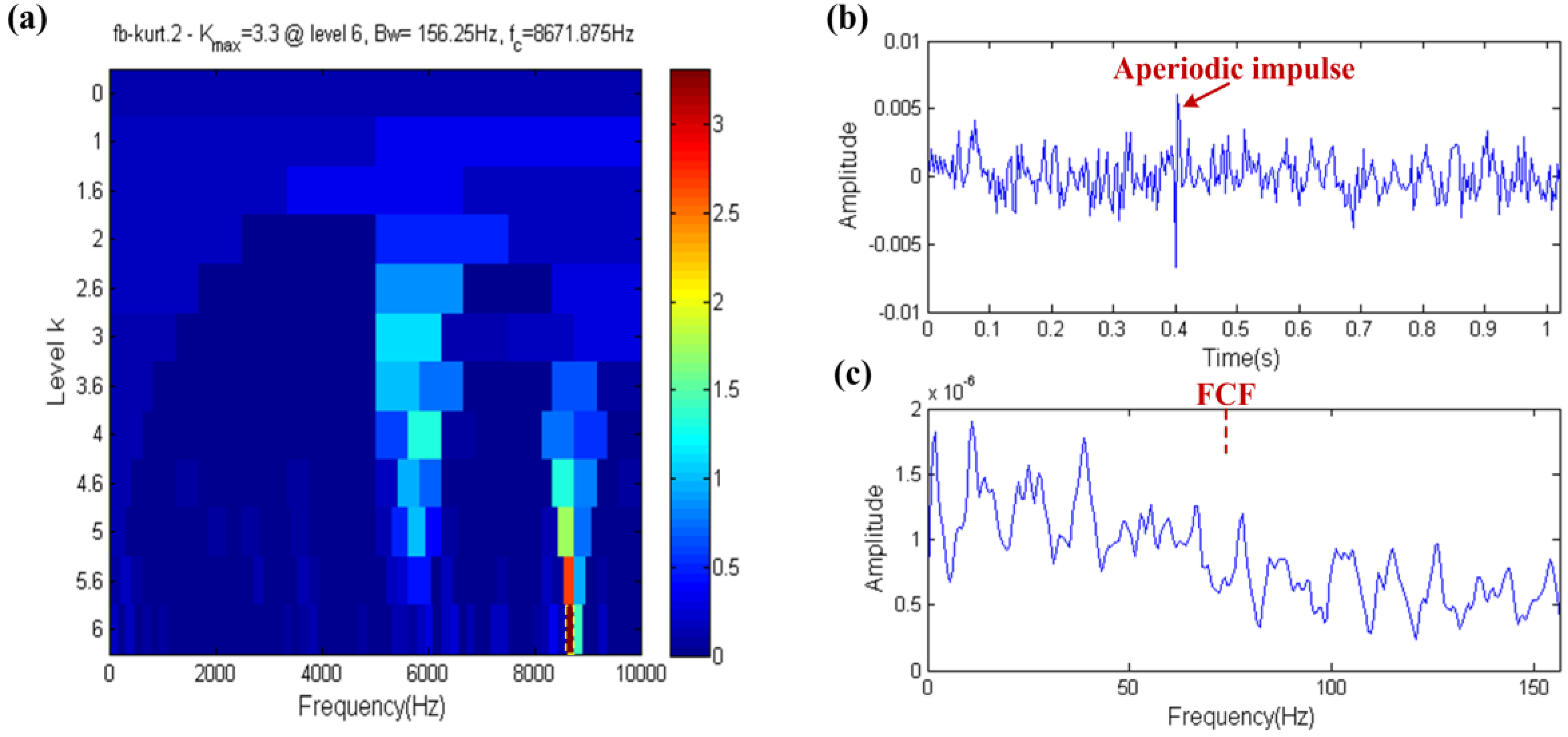
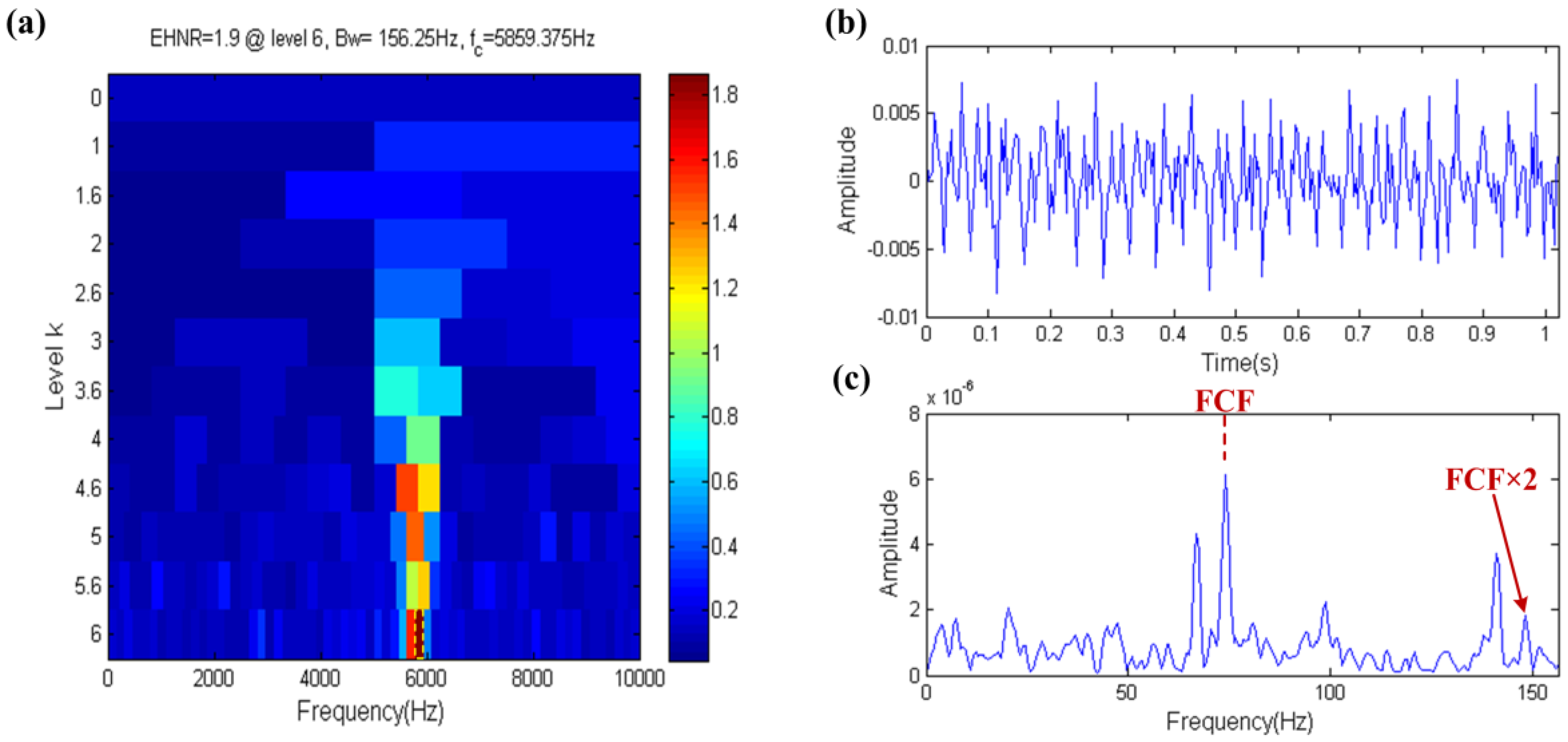
3.3. Capability of Distinguishing Fault Impulses and Aperiodic Impulses
4. The Proposed Method for Bearing Fault Diagnosis
- Step 1
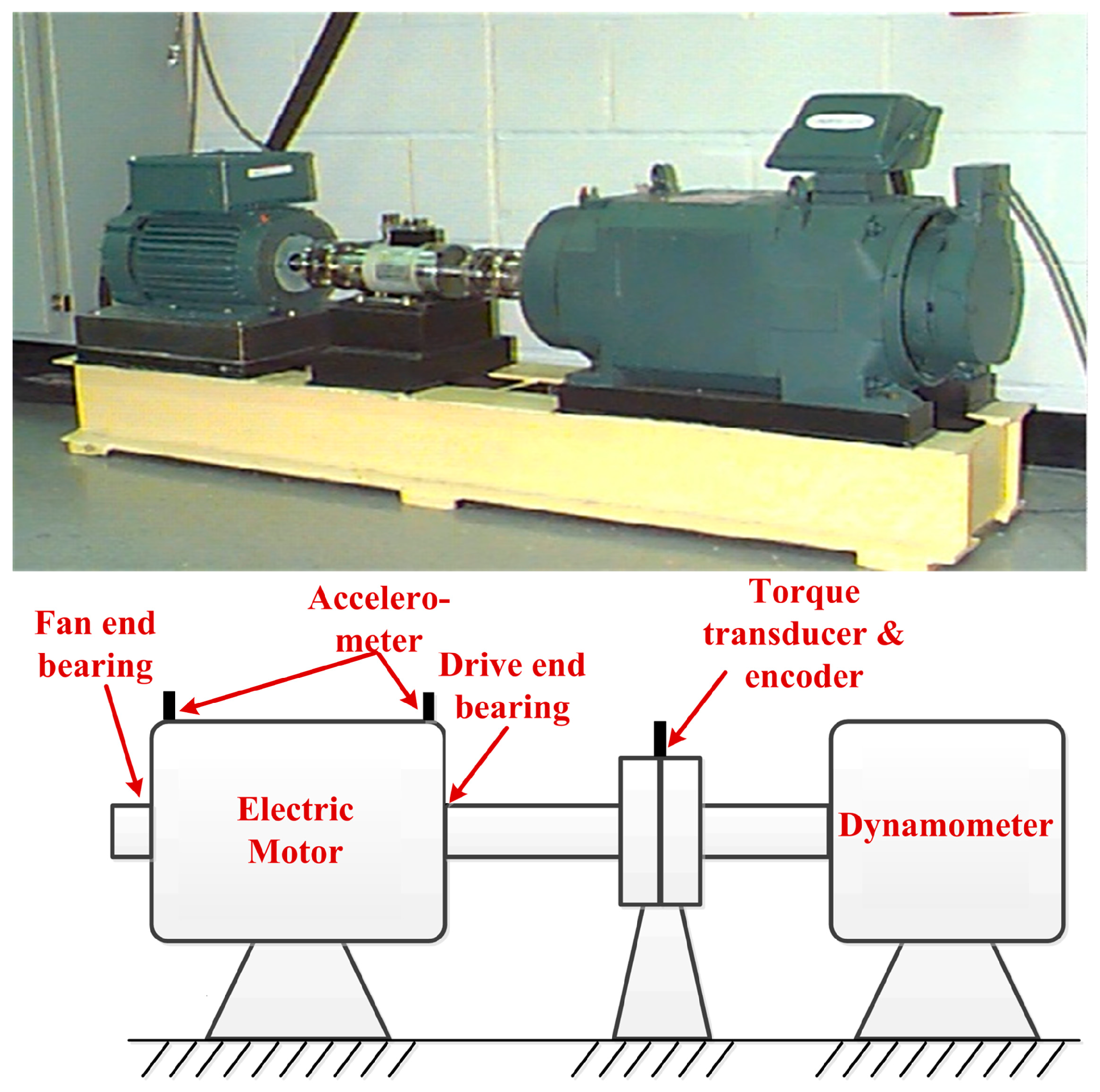
- Load the raw vibration signal measured by the accelerometer and calculate the theoretical fault characteristic frequency by using the geometrical parameters of the REB, then compute the period of impulses T through formula . Where , , and are the fault characteristic frequencies of outer race, rolling element, cage and inner race, respectively, is the sampling frequency.
- Step 2
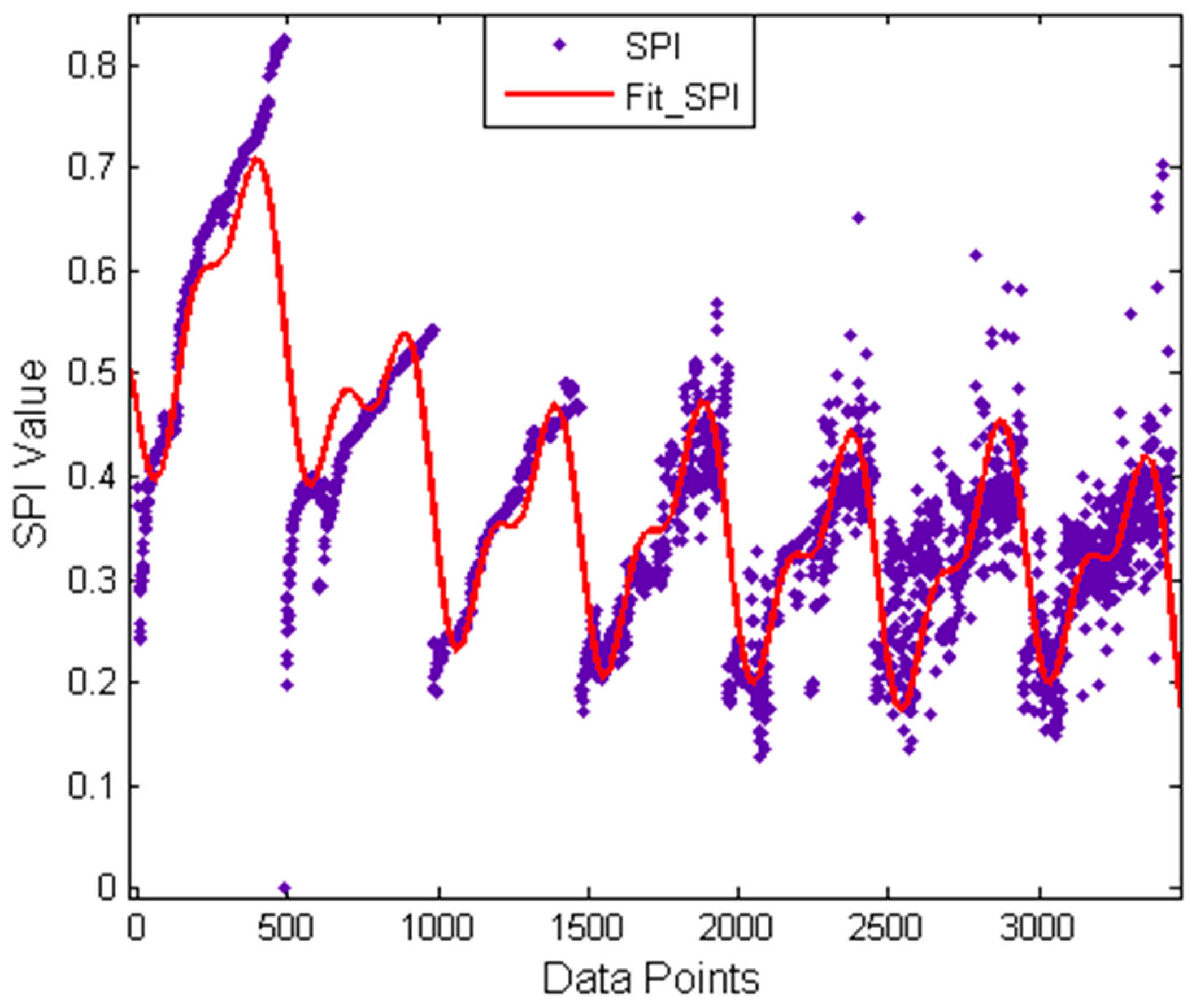
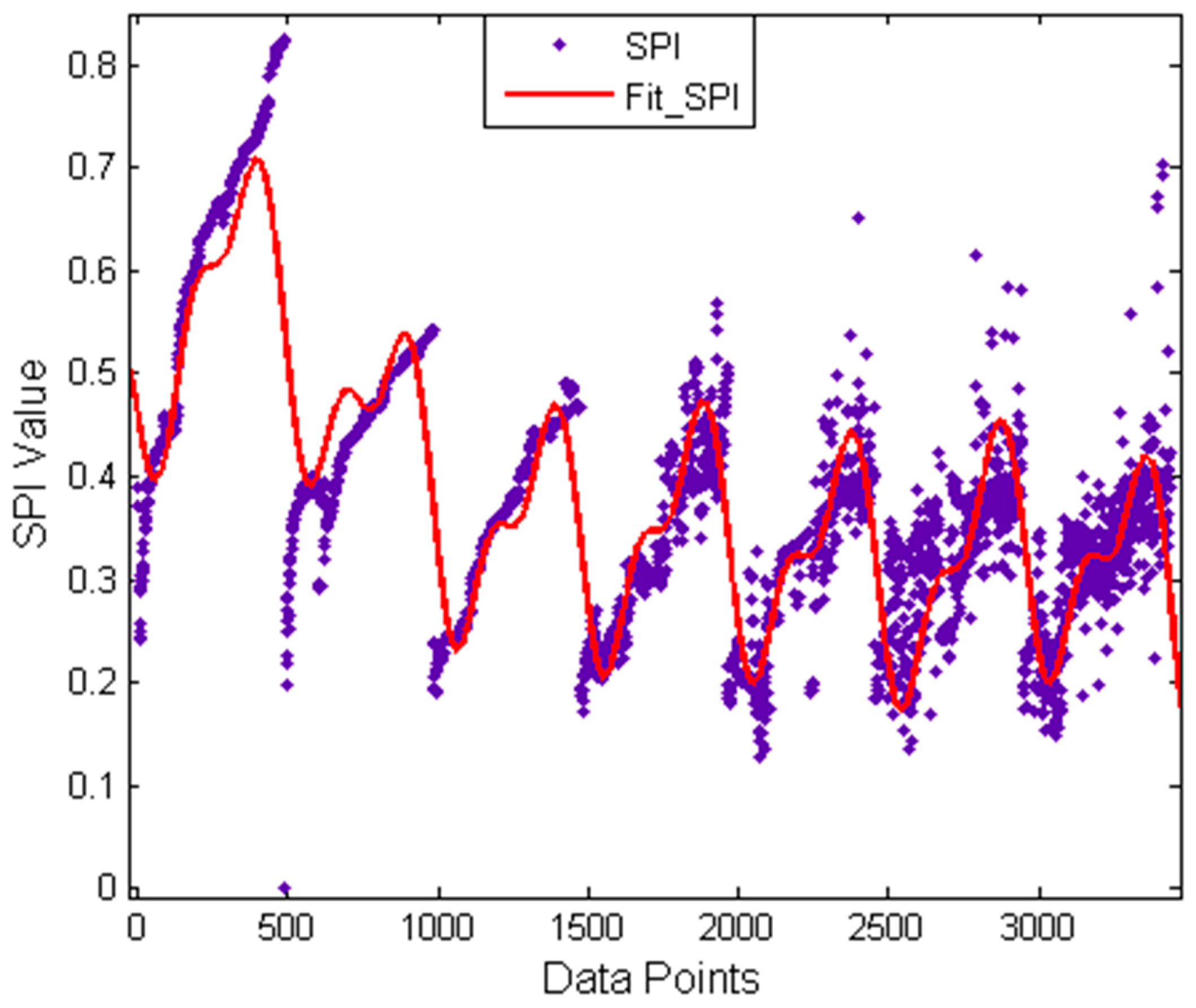
- Set 100 as the lower limit, 500 as the upper limit and 20 as the step size for L; Set 1 as the lower limit, 7 as the upper limit and 1 as the step size for M; then calculate the SPI value of the results of different preset parameters and find out the maximum of the SPI value. Next, use the maximum of the SPI value corresponding to the preset parameters as the MCKD’s optimization parameters.
- Step 3
- Use the optimization parameters as the preset parameters of the MCKD to filter the raw signal, then obtain the envelope spectrum with the help of the TEO technique.
- Step 4
- Diagnose the failure type on the basis of the extracted characteristic frequency information from the envelope spectrum.
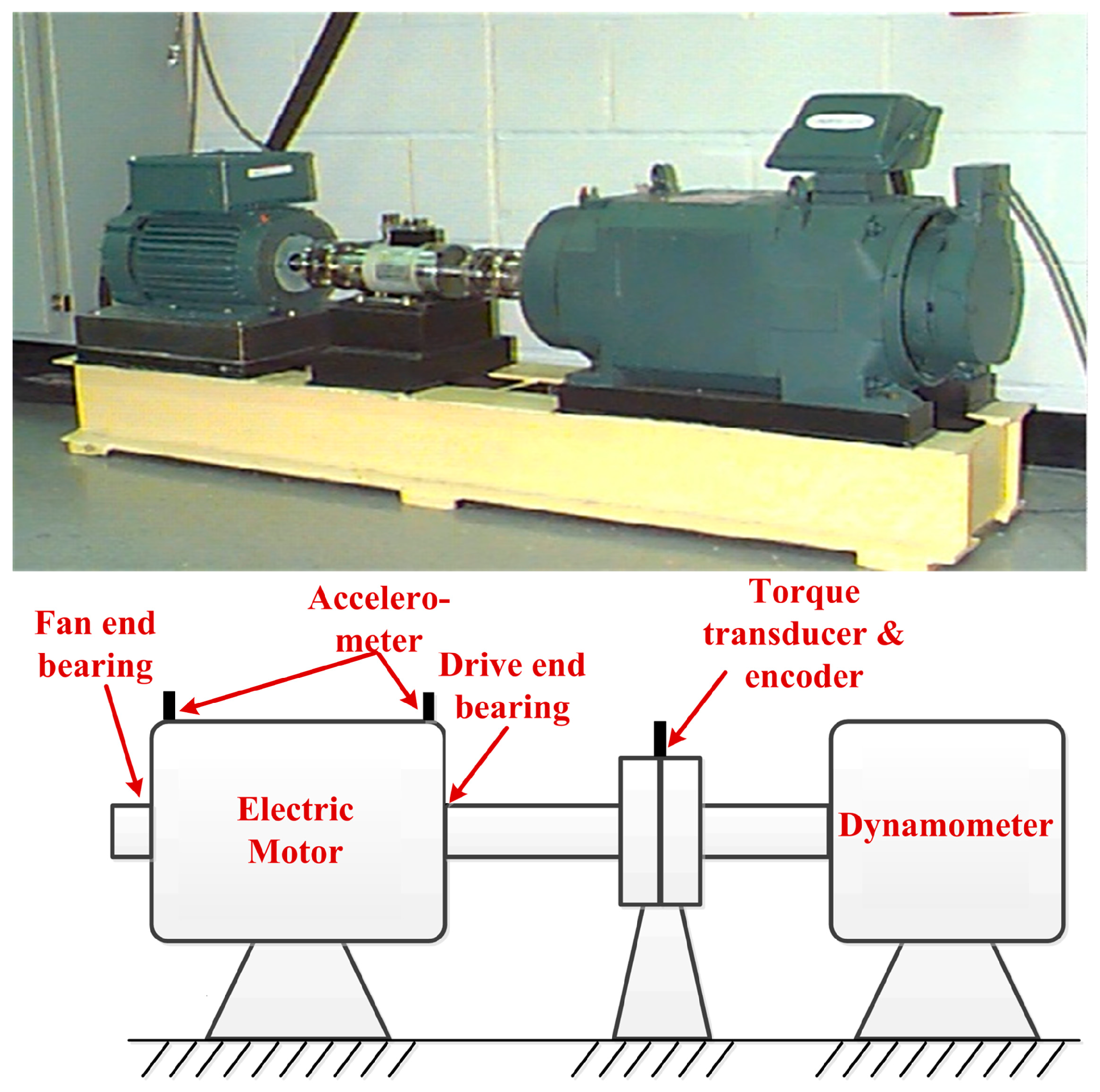
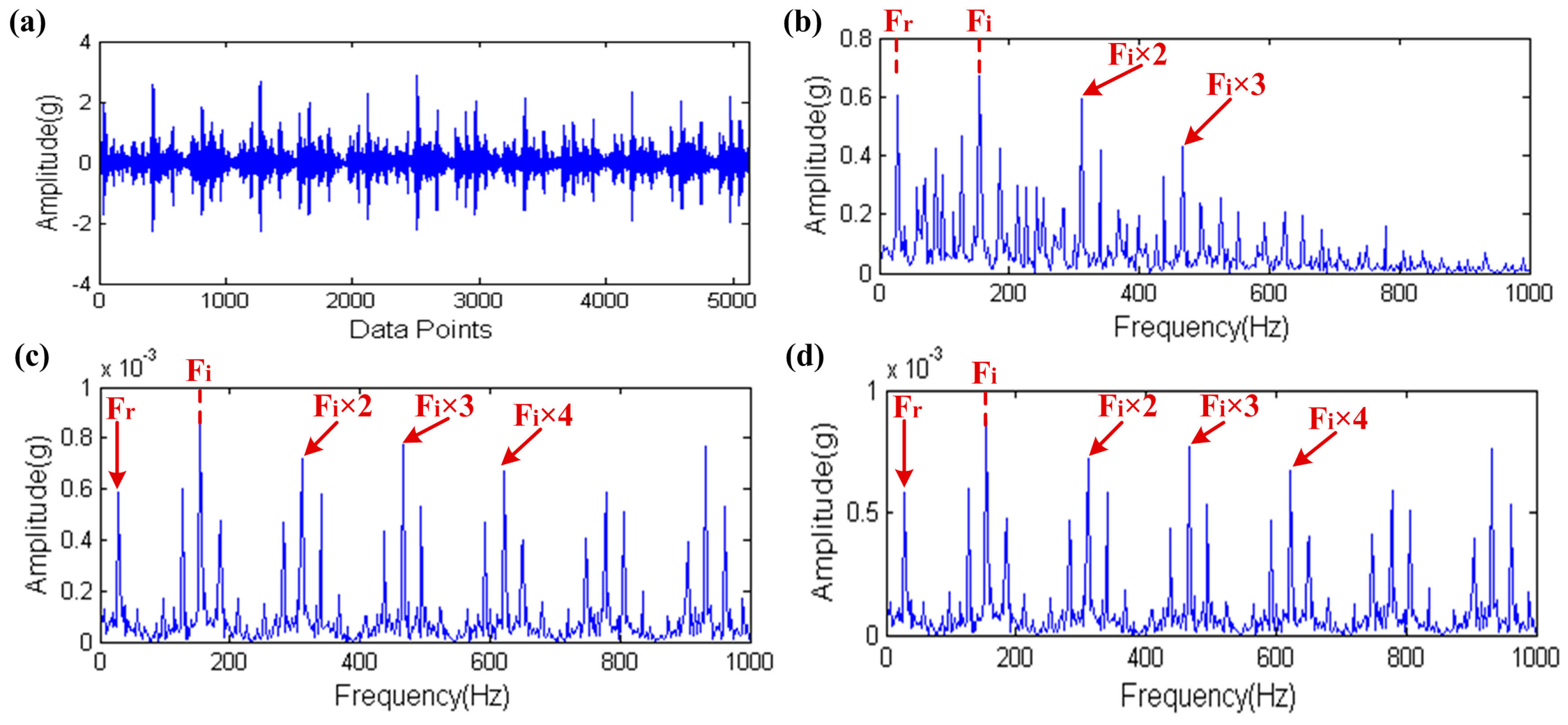
5. Experimental Study for Bearing Fault Diagnosis
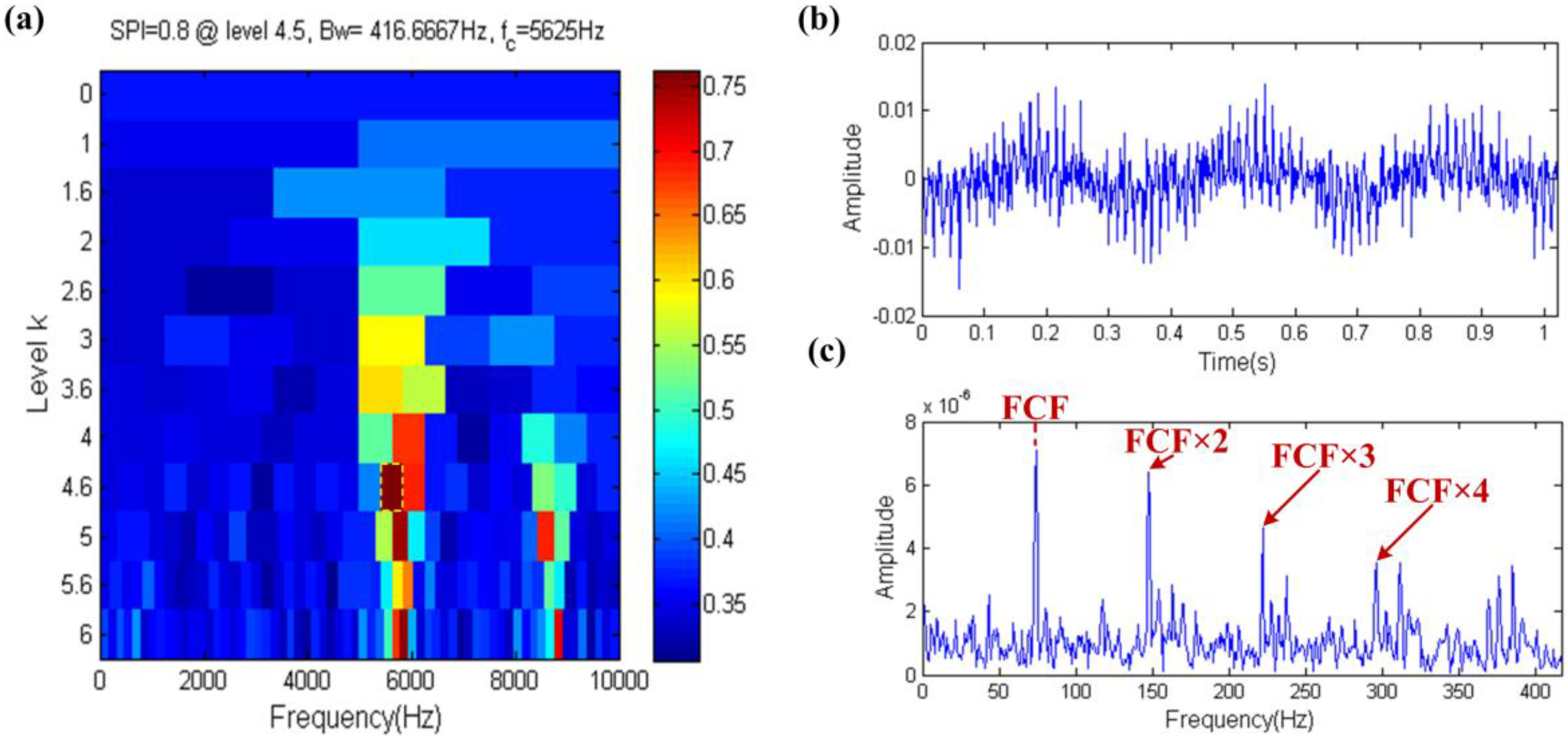
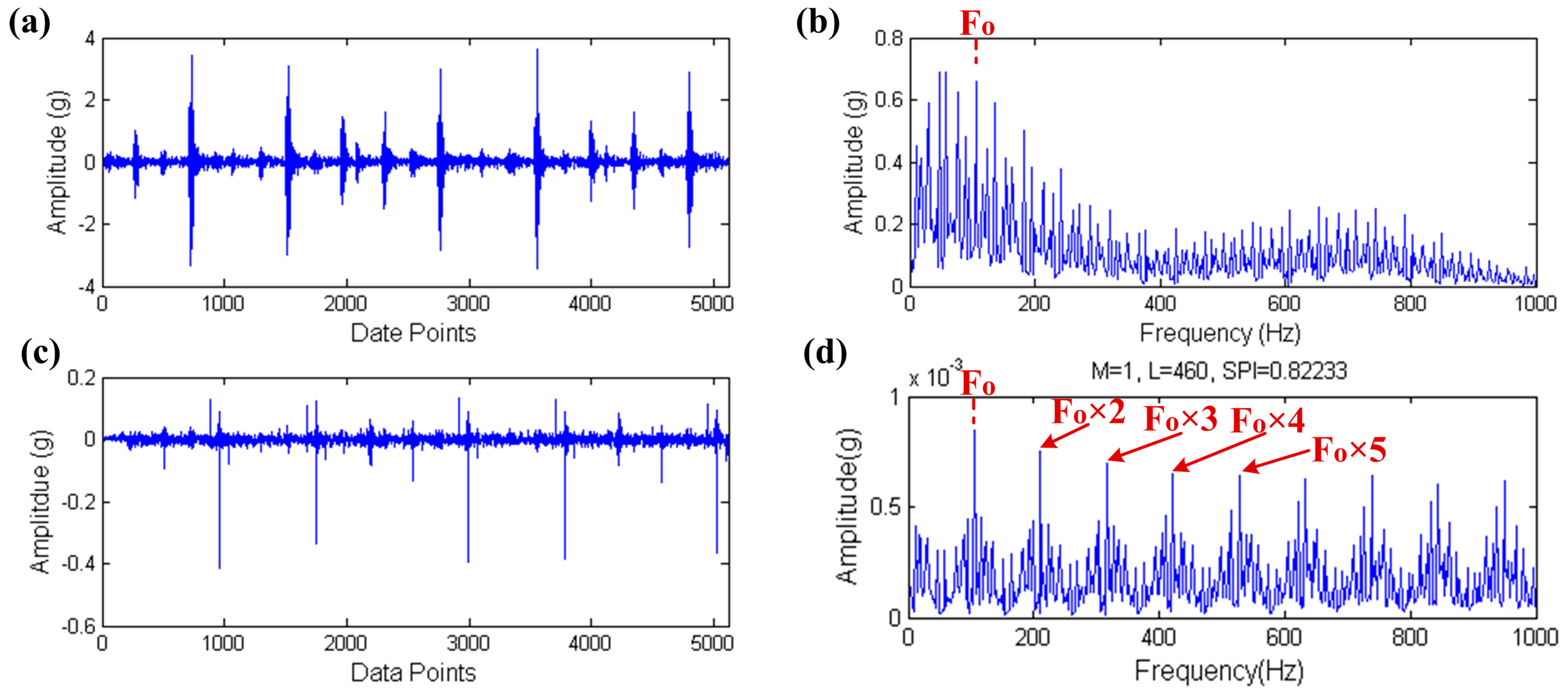
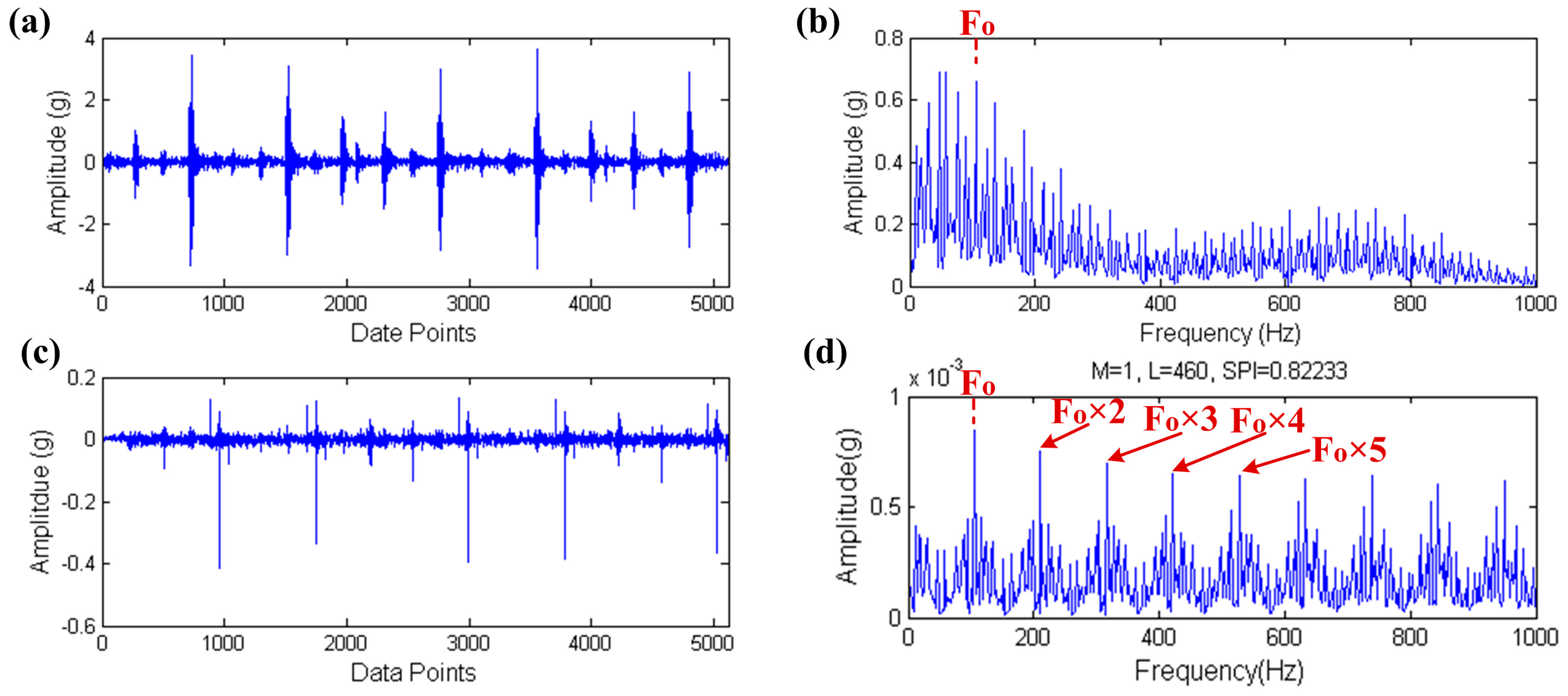
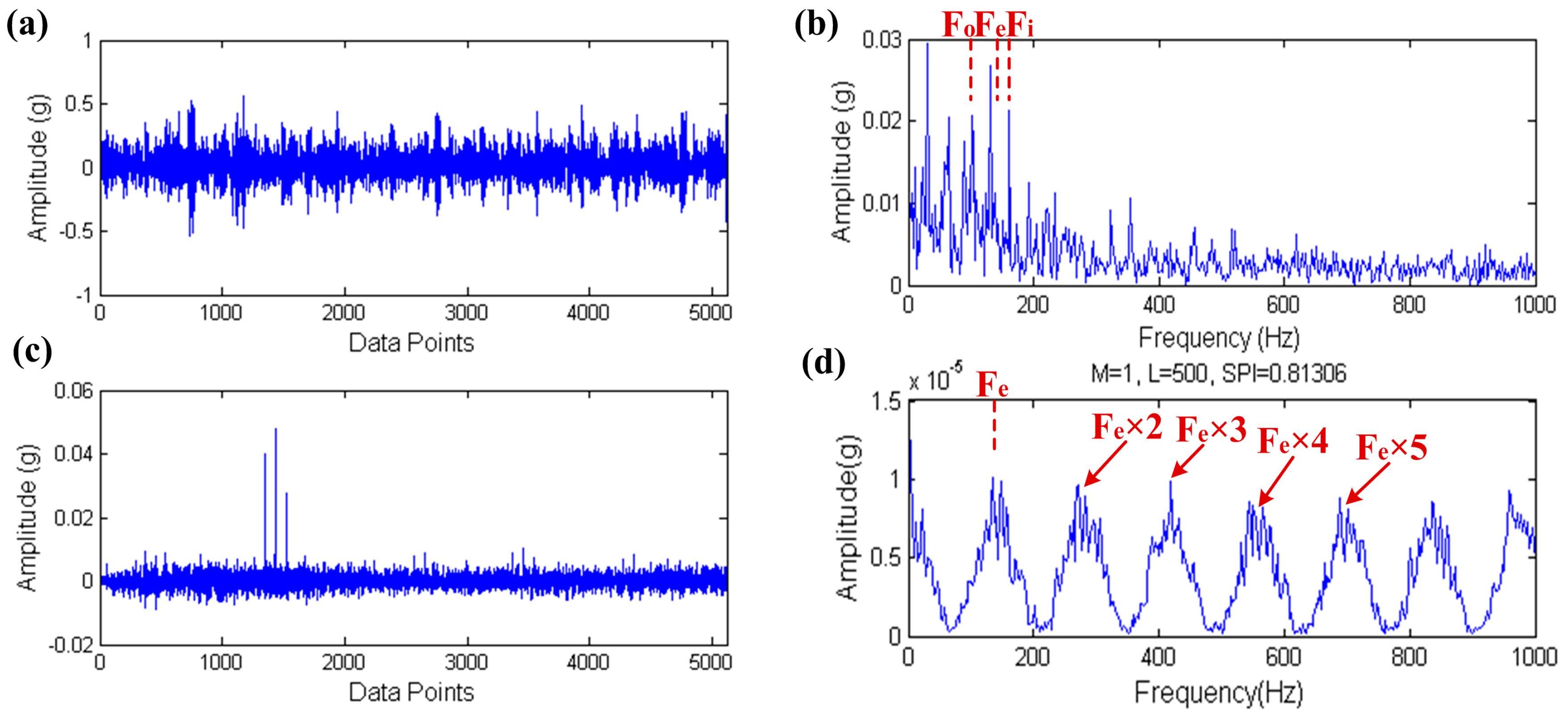
5.1. Outer Raceway Fault Diagnosis
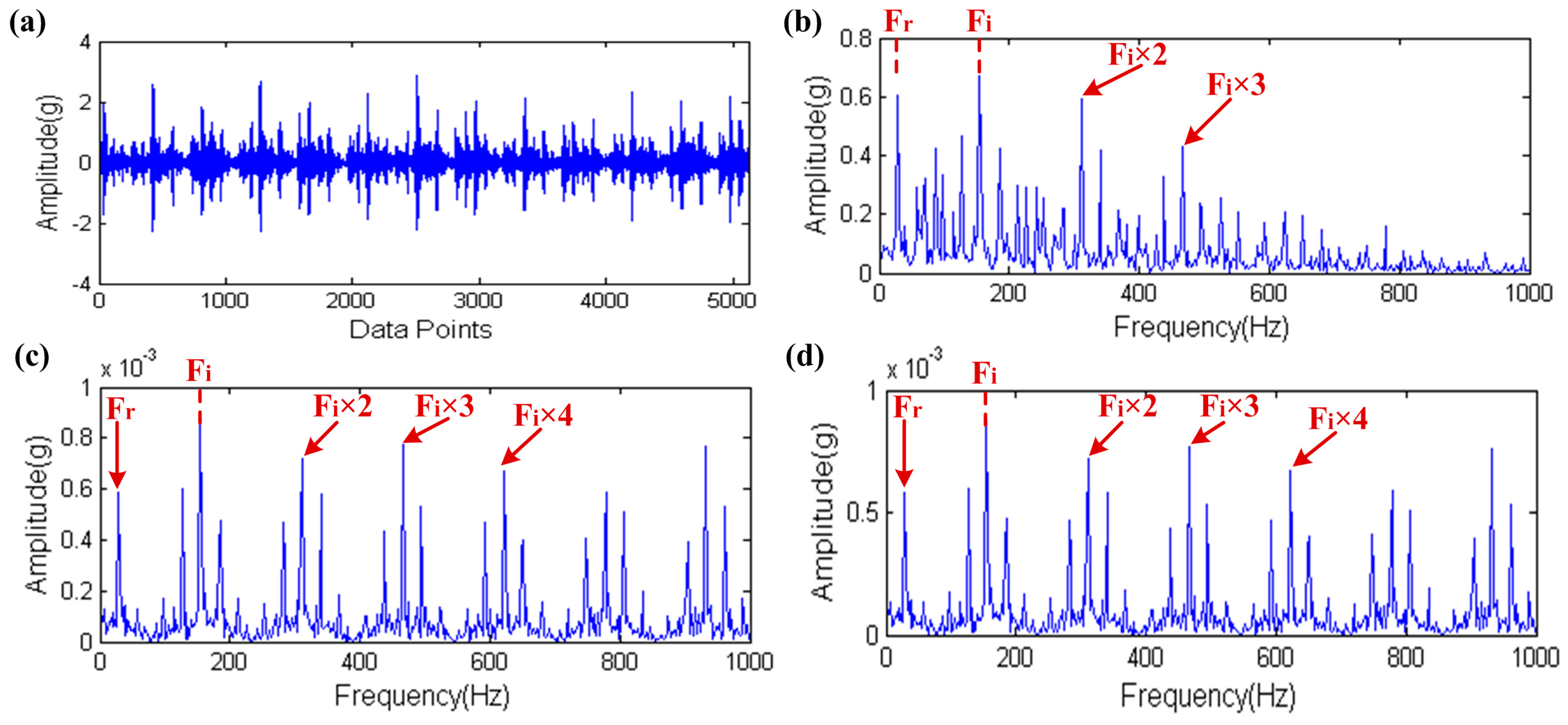
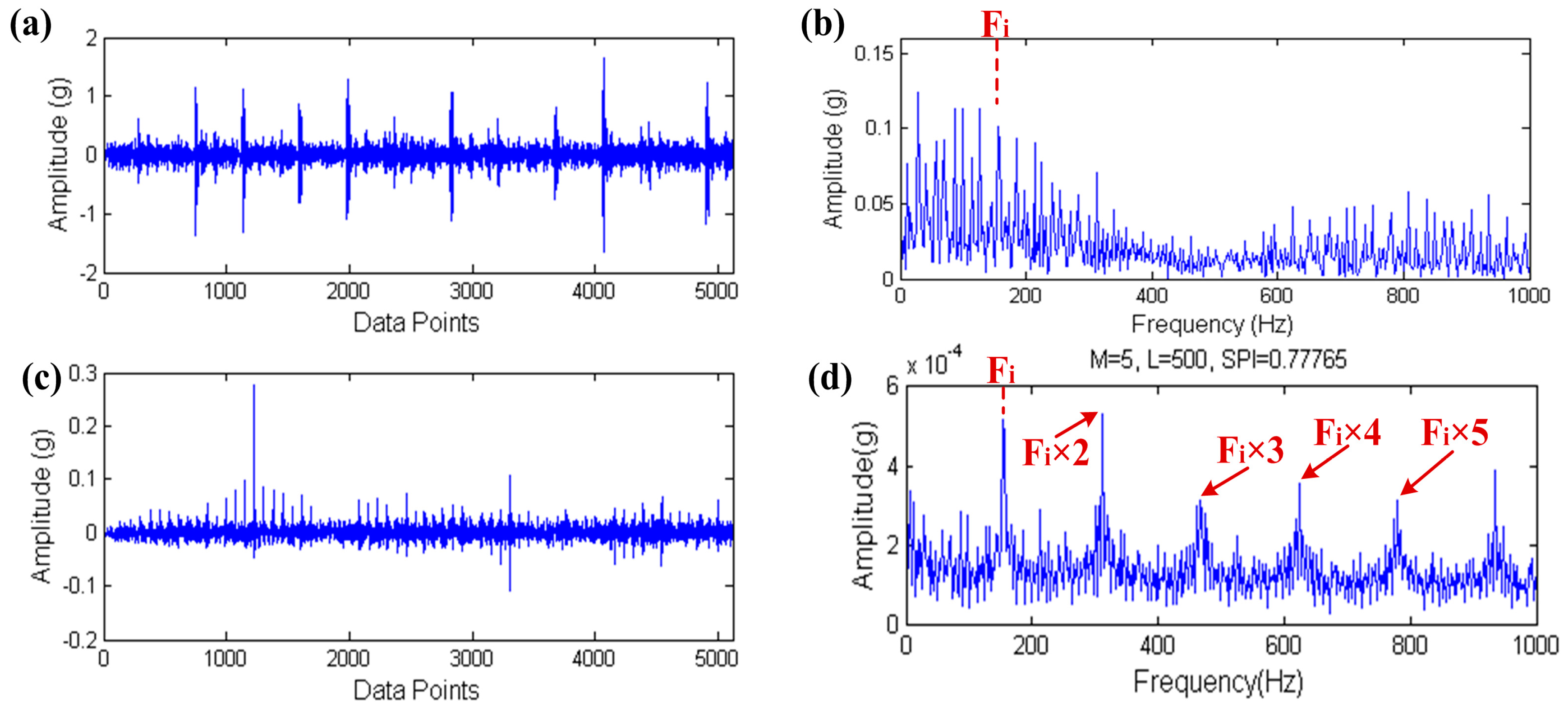
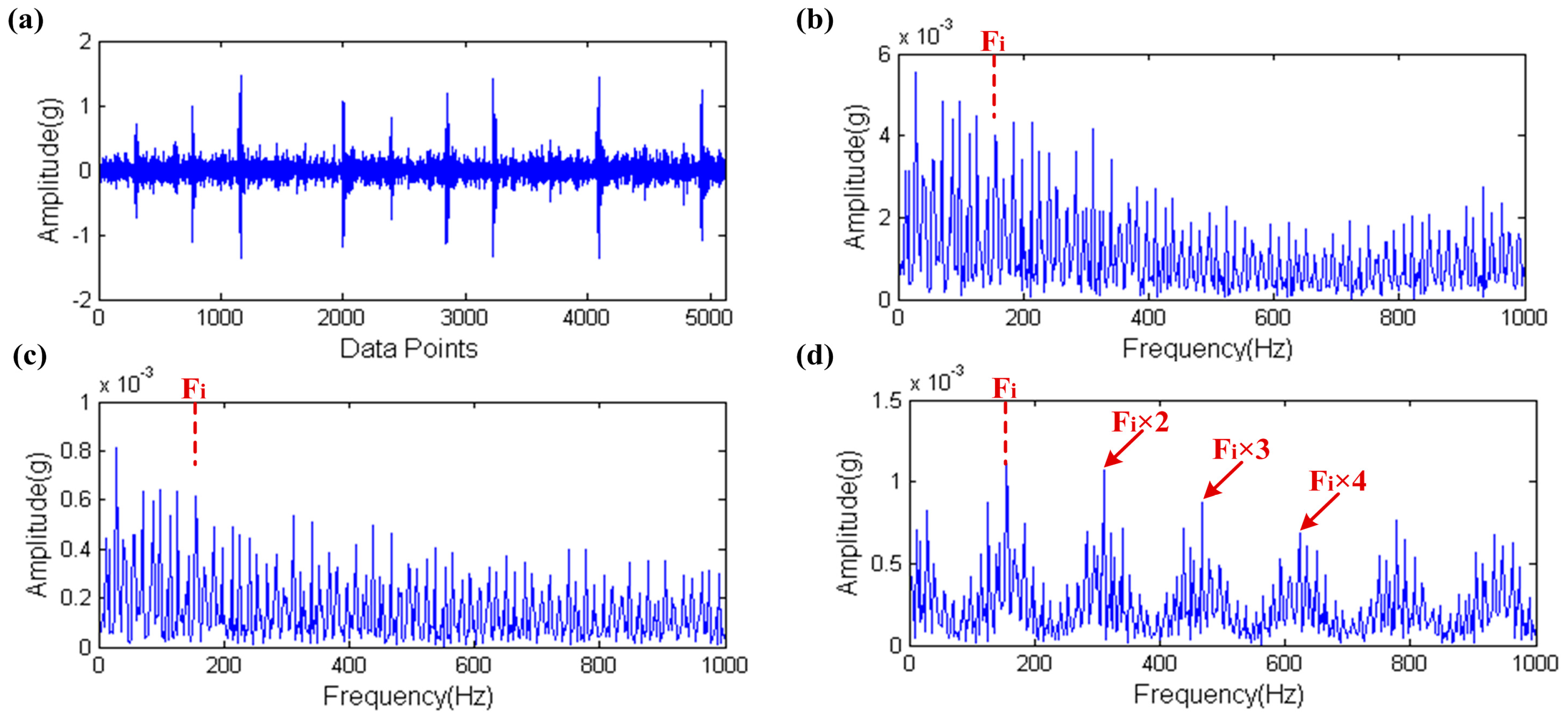
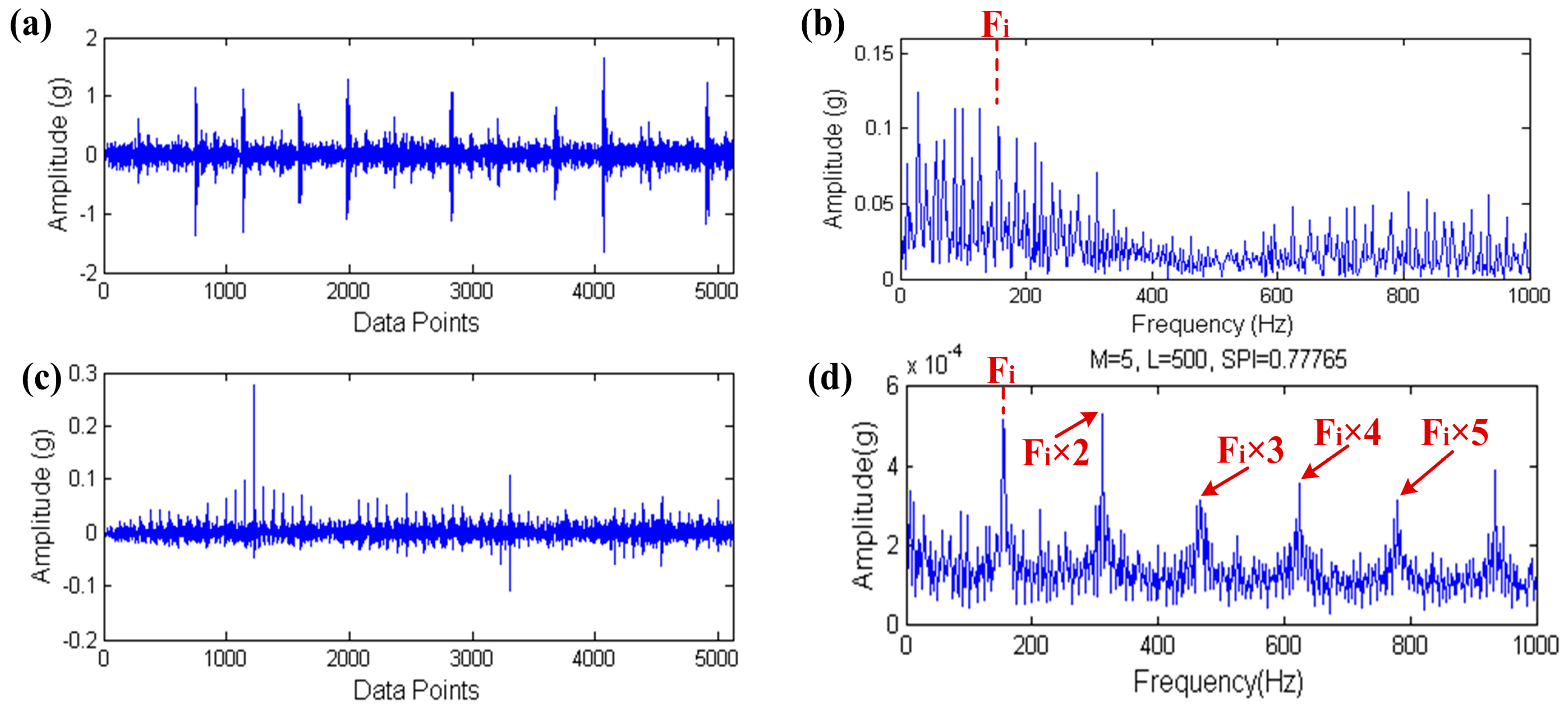
5.2. Inner Raceway Fault Diagnosis
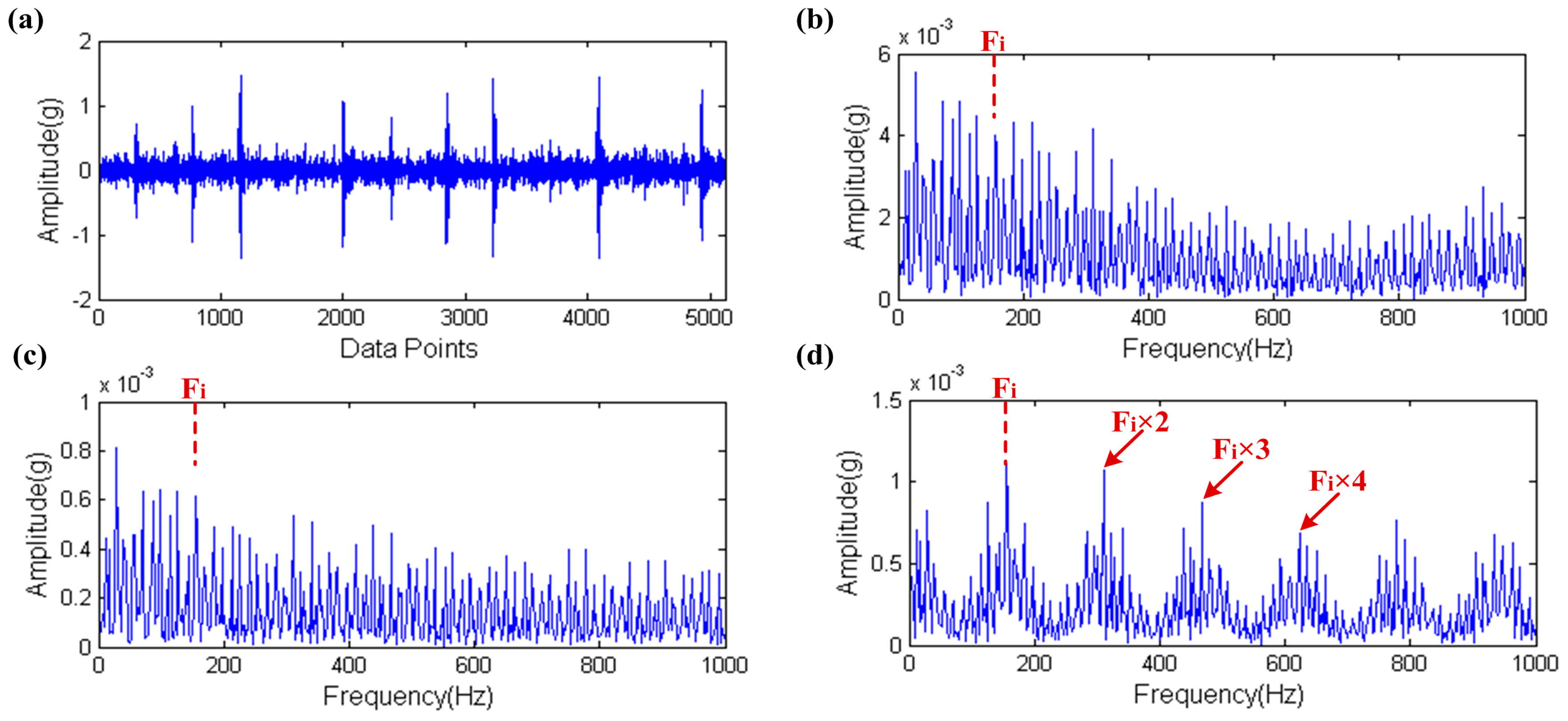
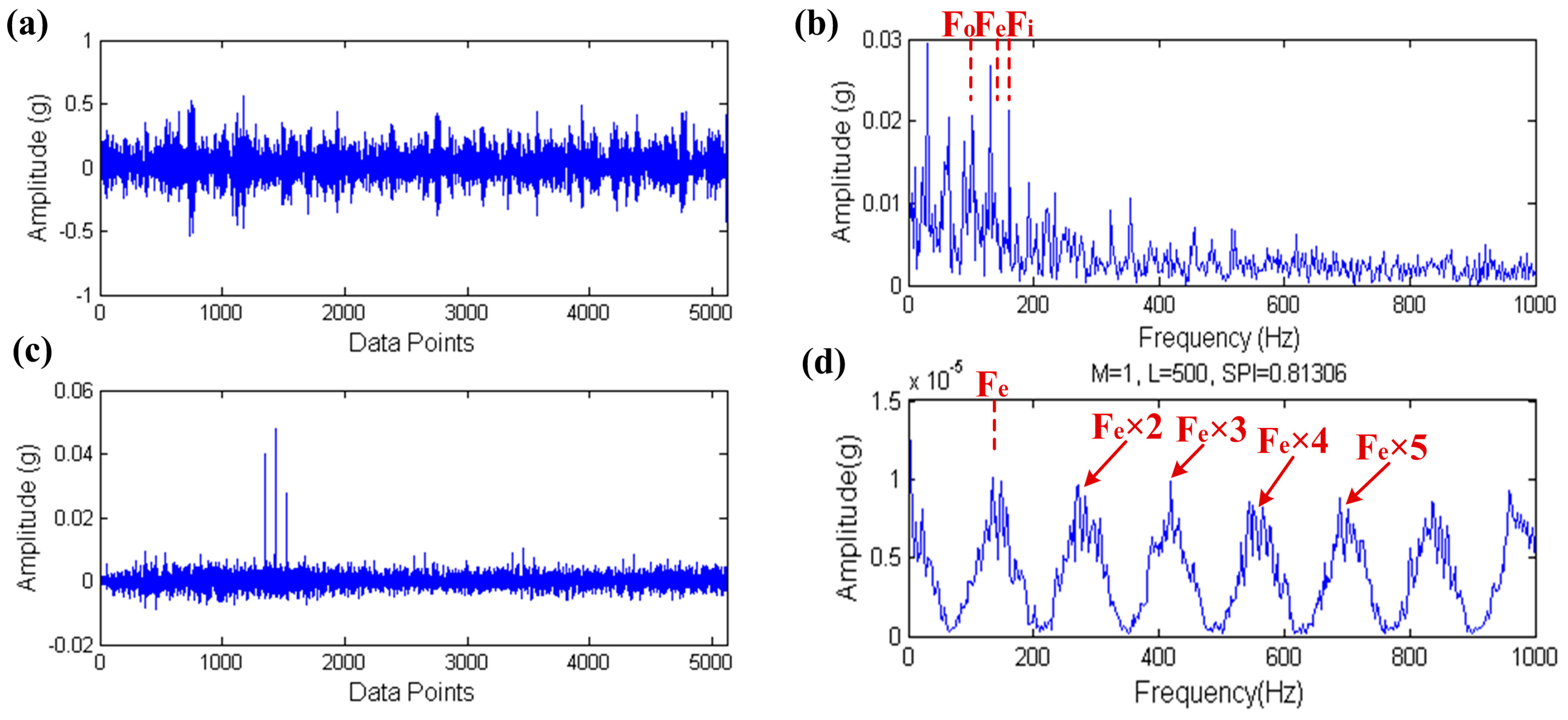
5.3. Rolling Element Fault Diagnosis
6. Discussion
7. Conclusions
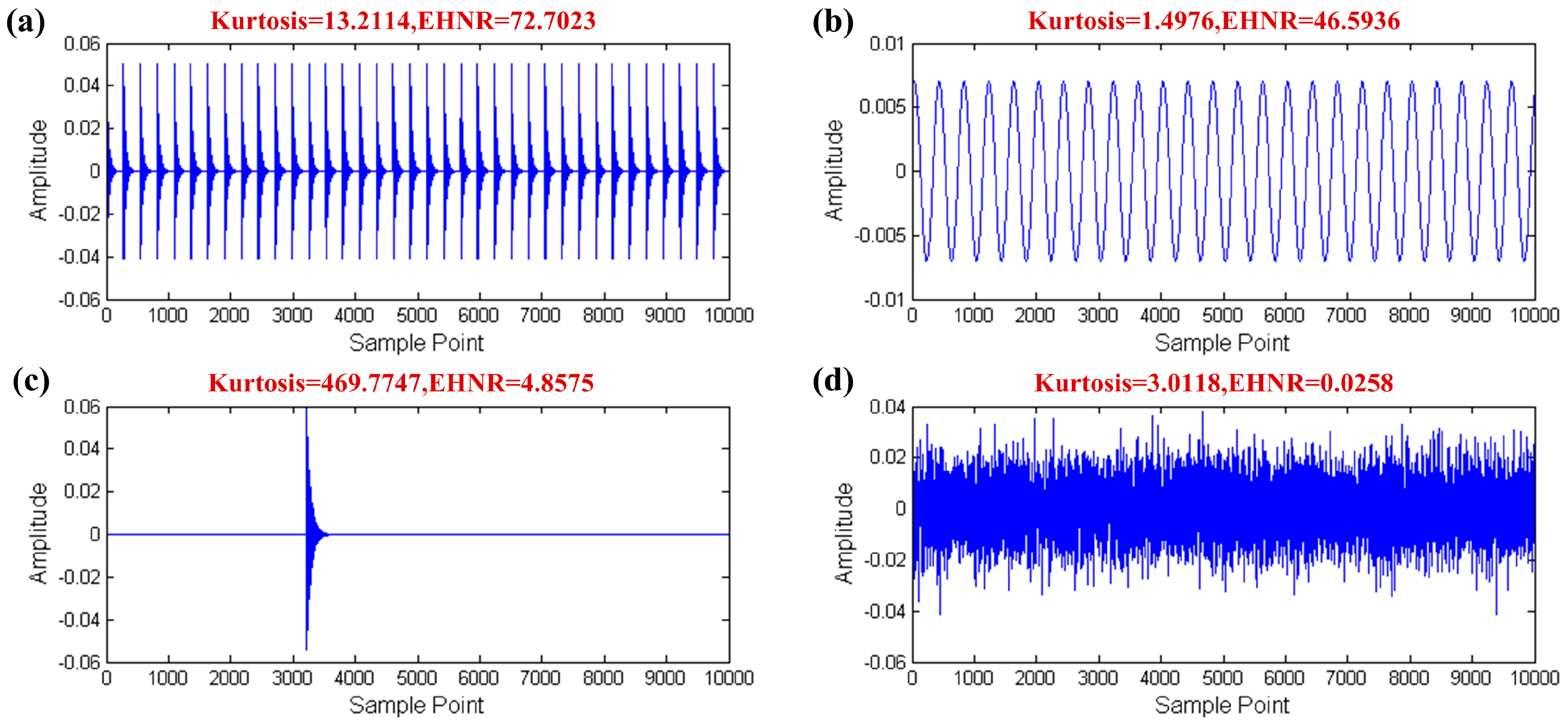
- Kurtosis index has the ability to resist the interference of the harmonic component, but it is not robust when dealing with the interference of strong noise and aperiodic impulses.
- The EHNR index can eliminate the influence of strong noise and aperiodic impulses to a certain extent, however the harmonic component will disable it.
- The SPI index has the ability to identify the fault impulse when facing the interference of strong noise, harmonic components or aperiodic impulses.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gao, Z.W.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques-Part I: Fault Diagnosis With Model-Based and Signal-Based Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Gao, Z.W.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques-Part II: Fault Diagnosis With Knowledge-Based and Hybrid/Active Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3768–3774. [Google Scholar] [CrossRef]
- Hong, L.; Dhupia, J.S. A time domain approach to diagnose gearbox fault based on measured vibration signals. J. Sound Vibr. 2014, 333, 2164–2180. [Google Scholar] [CrossRef]
- Gong, X.; Qiao, W. Bearing Fault Diagnosis for Direct-Drive Wind Turbines via Current-Demodulated Signals. IEEE Trans. Ind. Electron. 2013, 60, 3419–3428. [Google Scholar] [CrossRef]
- Feng, Z.; Liang, M.; Chu, F. Recent advances in time–frequency analysis methods for machinery fault diagnosis: A review with application examples. Mech. Syst. Signal Process. 2013, 38, 165–205. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Li, Y.B.; Xu, M.Q.; Wei, Y.; Huang, W.H. Health Condition Monitoring and Early Fault Diagnosis of Bearings Using SDF and Intrinsic Characteristic-Scale Decomposition. IEEE Trans. Instrum. Meas. 2016, 65, 2174–2189. [Google Scholar] [CrossRef]
- Tian, J.; Morillo, C.; Azarian, M.H.; Pecht, M. Motor Bearing Fault Detection Using Spectral Kurtosis-Based Feature Extraction Coupled With K-Nearest Neighbor Distance Analysis. IEEE Trans. Ind. Electron. 2016, 63, 1793–1803. [Google Scholar] [CrossRef]
- Taghizadeh-Alisaraei, A.; Rezaei-Asl, A. The effect of added ethanol to diesel fuel on performance, vibration, combustion and knocking of a CI engine. Fuel 2016, 185, 718–733. [Google Scholar] [CrossRef]
- Siegel, D.; Ly, C.; Lee, J. Methodology and Framework for Predicting Helicopter Rolling Element Bearing Failure. IEEE Trans. Reliab. 2012, 61, 846–857. [Google Scholar] [CrossRef]
- Dyer, D.; Stewart, R.M. Detection of rolling element bearing damage by statistical vibration analysis. J. Mech. Des. 1978, 100, 229–235. [Google Scholar] [CrossRef]
- Dwyer, R.F. Detection of non-Gaussian signals by frequency domain Kurtosis estimation. In Proceedings of ICASSP 83 IEEE International Conference on Acoustics, Speech and Signal Processing, Boston, MA, USA, 14–16 April 1983.
- Antoni, J. The spectral kurtosis: A useful tool for characterising non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]
- Antoni, J.; Randall, R.B. The spectral kurtosis: Application to the vibratory surveillance and diagnostics of rotating machines. Mech. Syst. Signal Process. 2006, 20, 308–331. [Google Scholar] [CrossRef]
- Antoni, J. Fast computation of the kurtogram for the detection of transient faults. Mech. Syst. Signal Process. 2007, 21, 108–124. [Google Scholar] [CrossRef]
- Lei, Y.G.; Lin, J.; He, Z.J.; Zi, Y.Y. Application of an improved kurtogram method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2011, 25, 1738–1749. [Google Scholar] [CrossRef]
- Barszcz, T.; JabŁoński, A. A novel method for the optimal band selection for vibration signal demodulation and comparison with the Kurtogram. Mech. Syst. Signal Process. 2011, 25, 431–451. [Google Scholar] [CrossRef]
- Xu, X.Q.; Zhao, M.; Lin, J.; Lei, Y.G. Periodicity-based kurtogram for random impulse resistance. Meas. Sci. Technol. 2015, 26, 085011. [Google Scholar] [CrossRef]
- Xu, X.Q.; Zhao, M.; Lin, J.; Lei, Y.G. Envelope harmonic-to-noise ratio for periodic impulses detection and its application to bearing diagnosis. Measurement 2016, 91, 385–397. [Google Scholar] [CrossRef]
- McDonald, G.L.; Zhao, Q.; Zuo, M.J. Maximum correlated Kurtosis deconvolution and application on gear tooth chip fault detection. Mech. Syst. Signal Process. 2012, 33, 237–255. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.G.; Shan, H.K.; Lin, J. Early Fault Diagnosis of Bearings Using an Improved Spectral Kurtosis by Maximum Correlated Kurtosis Deconvolution. Sensors 2015, 15, 29363–29377. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.T.; Chen, J.; Dong, G.M. Engineering Asset Management—Systems, Professional Practices and Certification; Tse, P.W., Mathew, J., Wong, K., Lam, R., Ko, C.N., Eds.; Springer: Cham, Switzerland, 2015; pp. 159–172. [Google Scholar]
- Tang, G.J.; Wang, X.L.; He, Y.L. Diagnosis of compound faults of rolling bearings through adaptive maximum correlated kurtosis deconvolution. J. Mech. Sci. Tehcnol. 2016, 30, 43–54. [Google Scholar] [CrossRef]
- Liang, M.; Bozchalooi, I.S. An energy operator approach to joint application of amplitude and frequency-demodulations for bearing fault detection. Mech. Syst. Signal Process. 2010, 24, 1473–1494. [Google Scholar] [CrossRef]
- Feng, Z.P.; Liang, M.; Zhang, Y.; Hou, S.M. Fault diagnosis for wind turbine planetary gearboxes via demodulation analysis based on ensemble empirical mode decomposition and energy separation. Renew. Energy 2012, 47, 112–126. [Google Scholar] [CrossRef]
- Maragos, P.; Kaiser, J.F.; Quatieri, T.F. On amplitude and frequency demodulation using energy operators. IEEE. Trans. Signal. Proces 1993, 41, 1532–1550. [Google Scholar] [CrossRef]
- Maragos, P.; Kaiser, J.F.; Quatieri, T.F. Energy separation in signal modulations with application to speech analysis. IEEE. Trans. Signal. Proces 1993, 41, 3024–3051. [Google Scholar] [CrossRef]
- Potamianos, A.; Maragos, P. A comparison of the energy operator and the hilbert transform approach to signal and speech demodulation. Signal. Process. 1994, 37, 95–120. [Google Scholar] [CrossRef]
- Sawalhi, N.; Randall, R.B. Simulating gear and bearing interactions in the presence of faults. Mech. Syst. Signal Process. 2008, 22, 1924–1951. [Google Scholar] [CrossRef]
- Bearing Vibration Dataset. Available online: http://csegroups.case.edu/bearingdatacenter/pages/download-data-file (accessed on 8 October 2016).



© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, P.; Liao, Y.; Lin, J. The Shock Pulse Index and Its Application in the Fault Diagnosis of Rolling Element Bearings. Sensors 2017, 17, 535. https://doi.org/10.3390/s17030535
Sun P, Liao Y, Lin J. The Shock Pulse Index and Its Application in the Fault Diagnosis of Rolling Element Bearings. Sensors. 2017; 17(3):535. https://doi.org/10.3390/s17030535
Chicago/Turabian StyleSun, Peng, Yuhe Liao, and Jin Lin. 2017. "The Shock Pulse Index and Its Application in the Fault Diagnosis of Rolling Element Bearings" Sensors 17, no. 3: 535. https://doi.org/10.3390/s17030535
APA StyleSun, P., Liao, Y., & Lin, J. (2017). The Shock Pulse Index and Its Application in the Fault Diagnosis of Rolling Element Bearings. Sensors, 17(3), 535. https://doi.org/10.3390/s17030535