
A New Measurement Approach for Small Deformations of Soil Specimens Using Fiber Bragg Grating Sensors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Principle of the Small Deformation Transducer
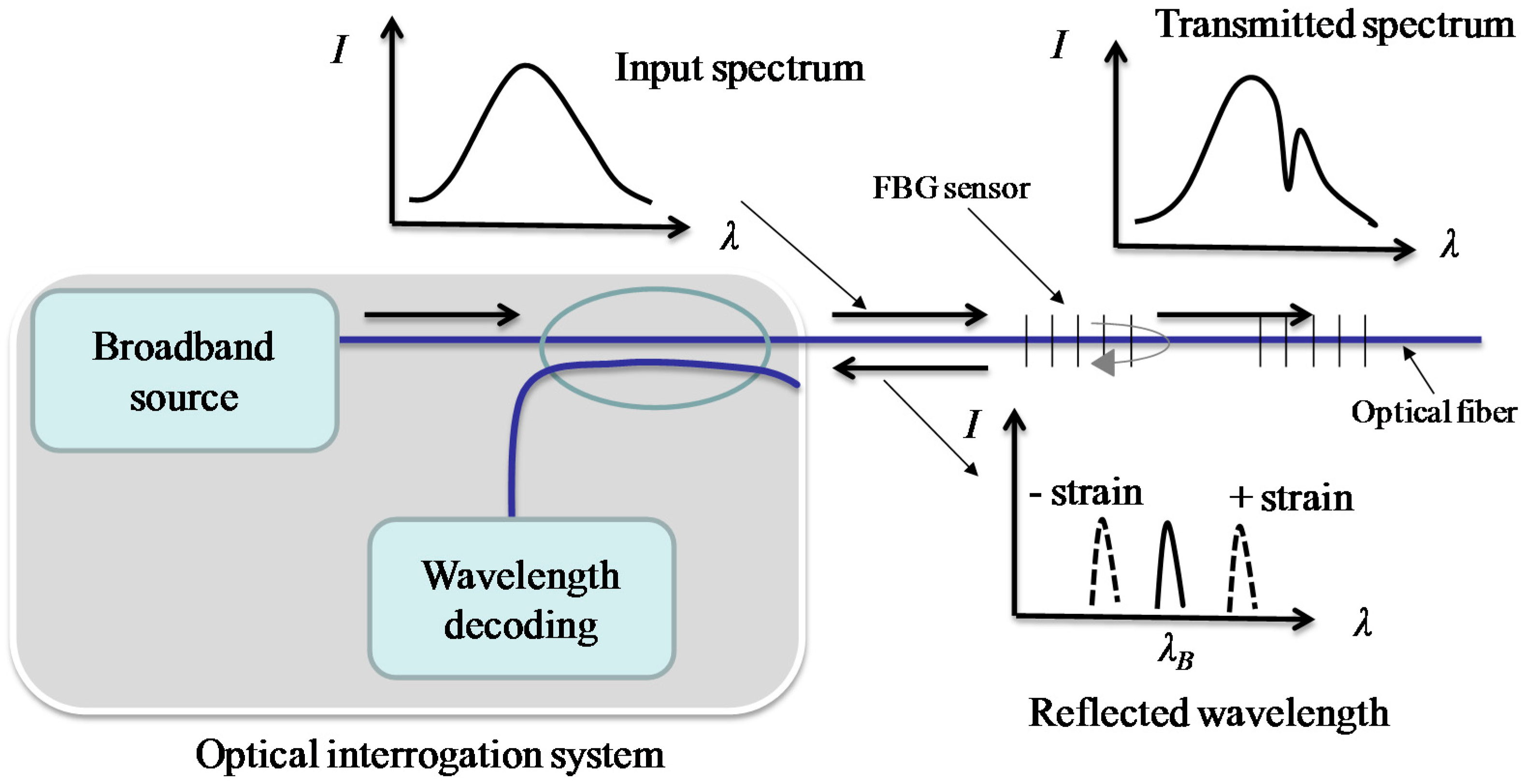
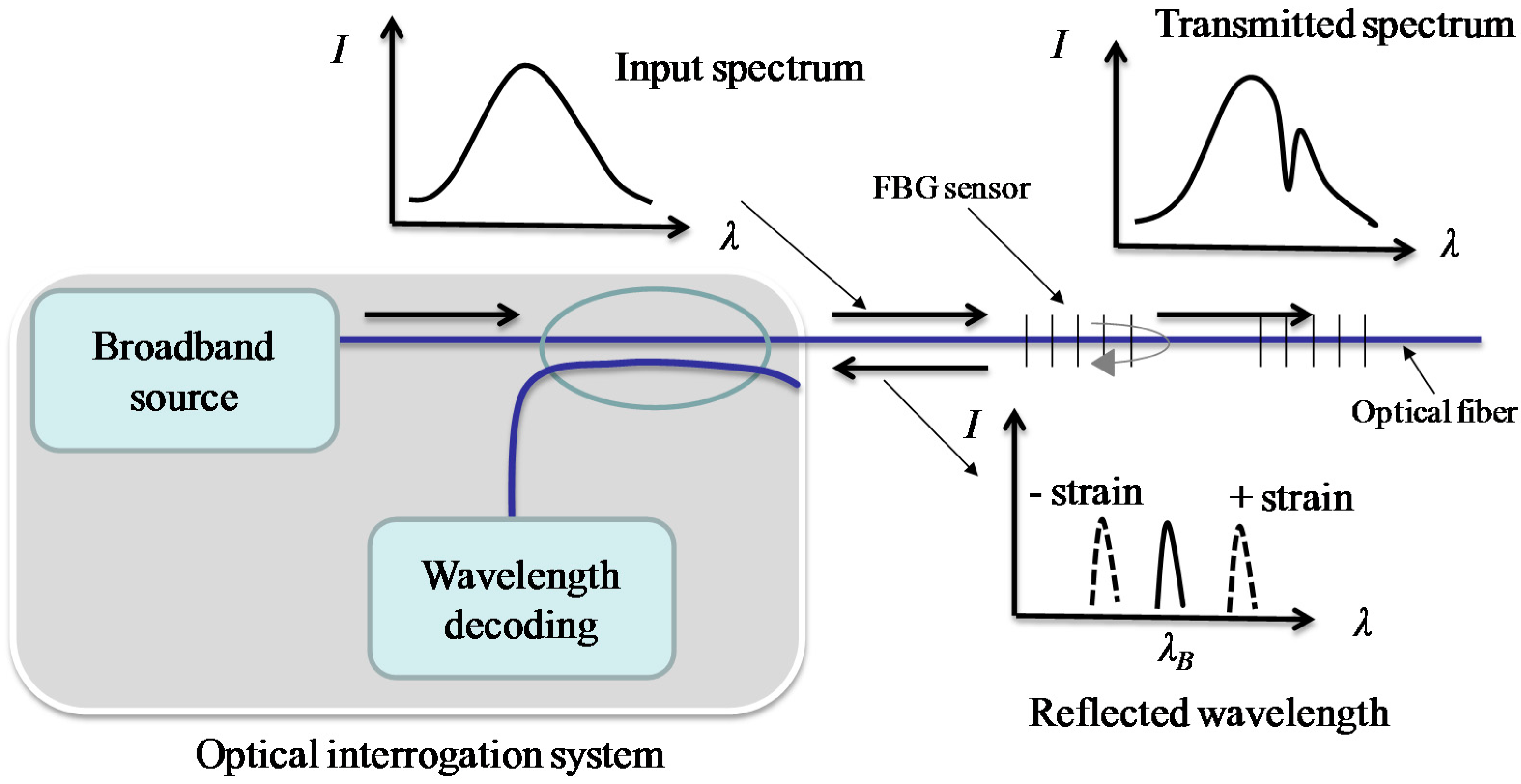
2.1. Principles of the FBG Sensor
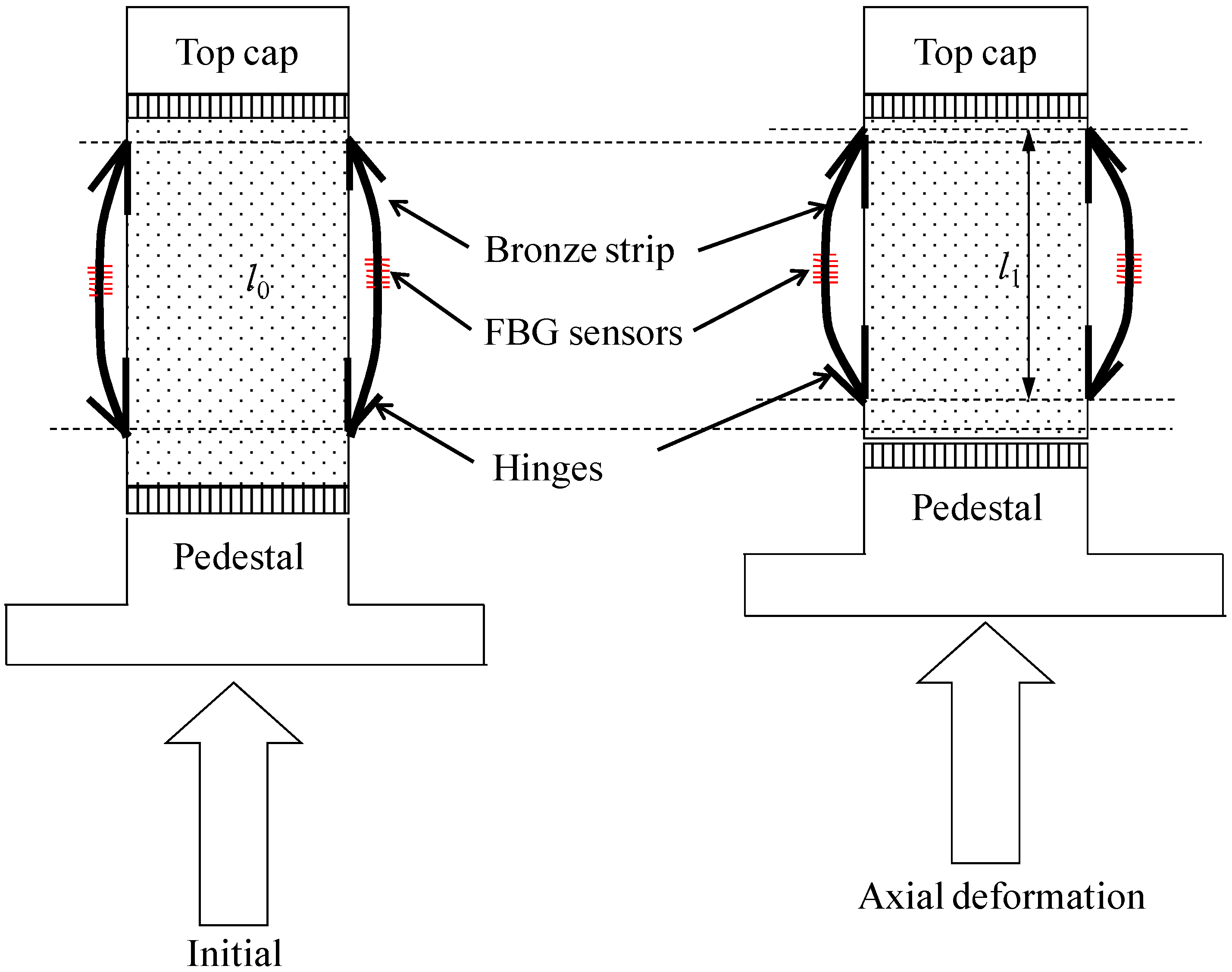
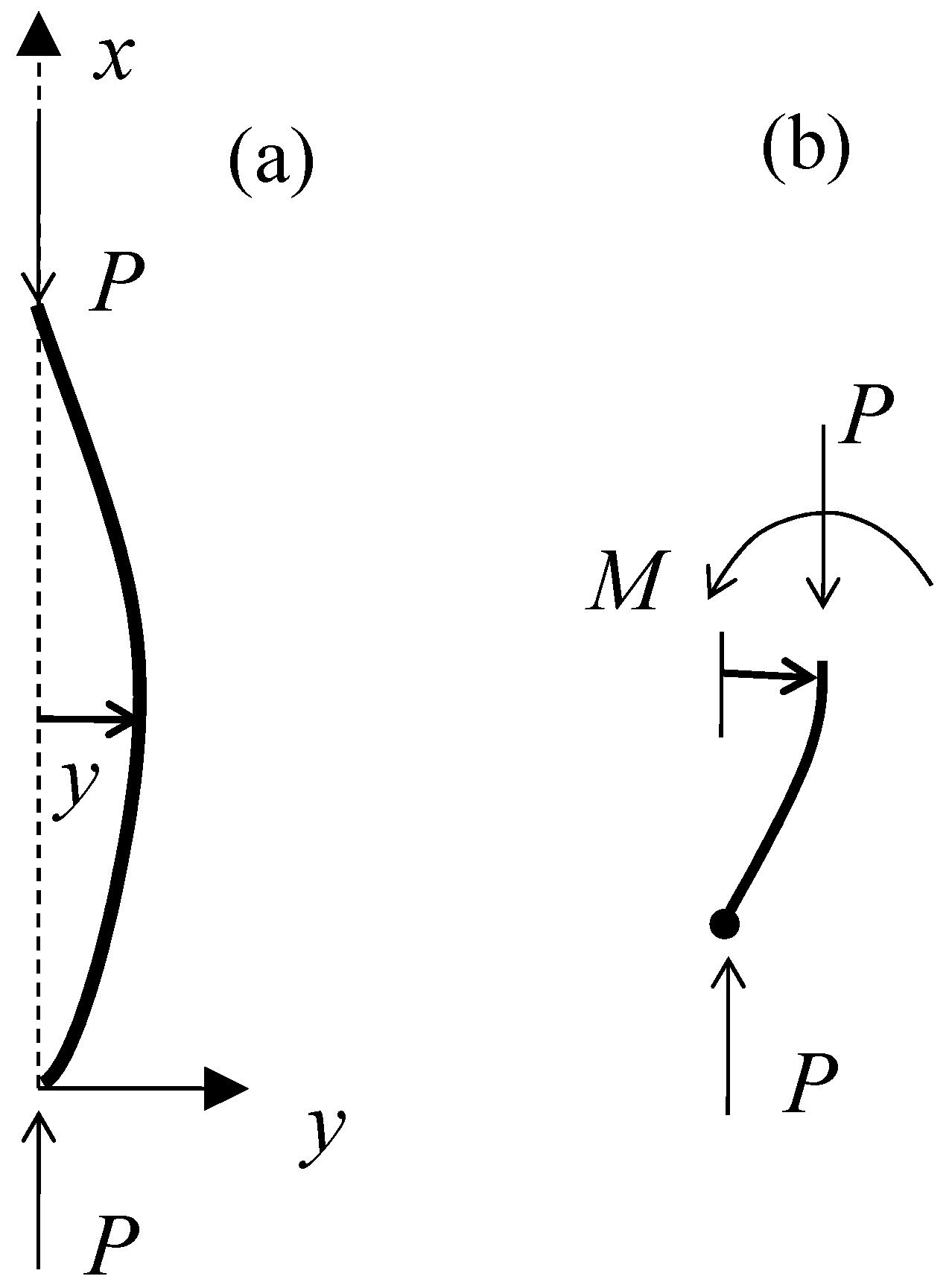
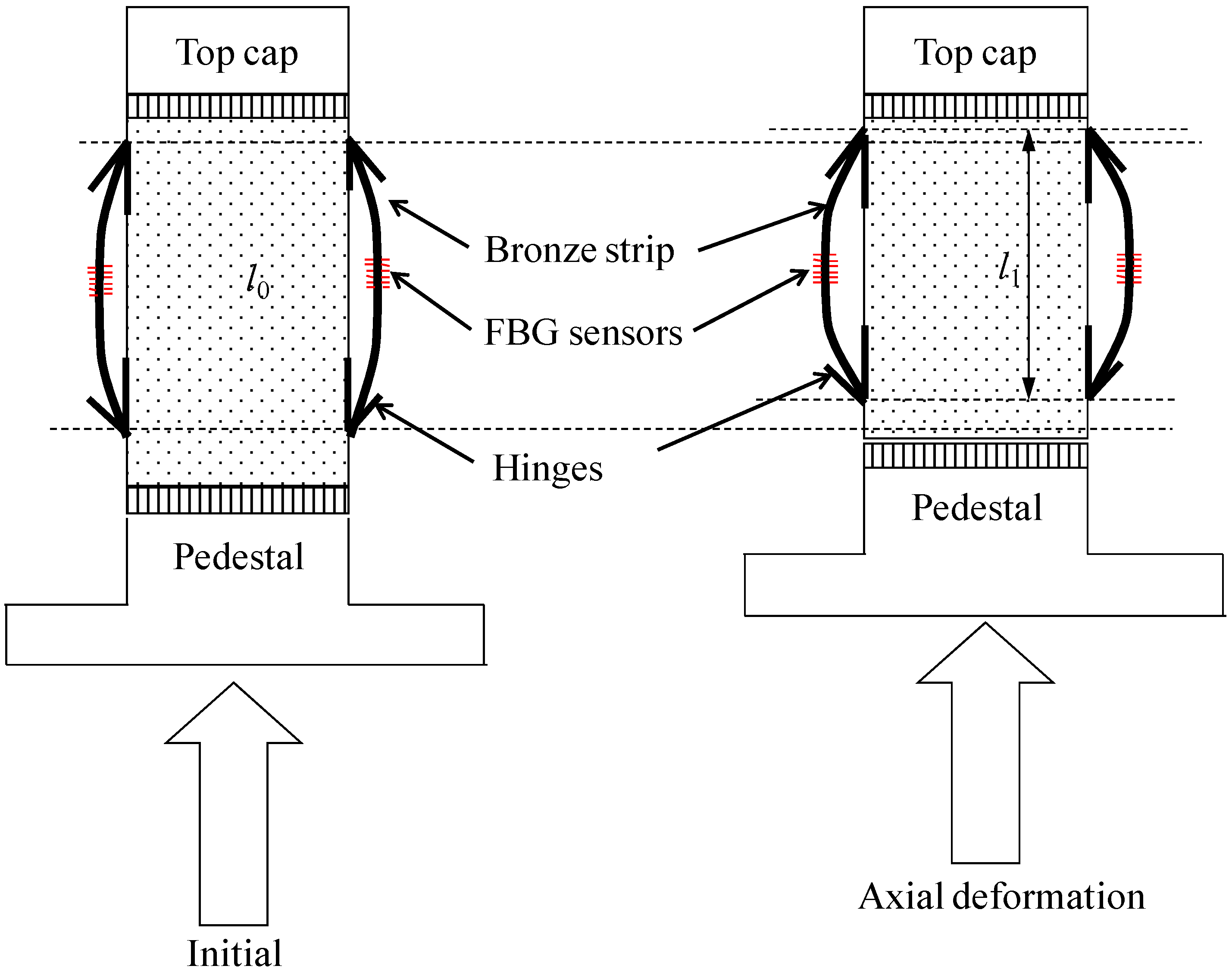
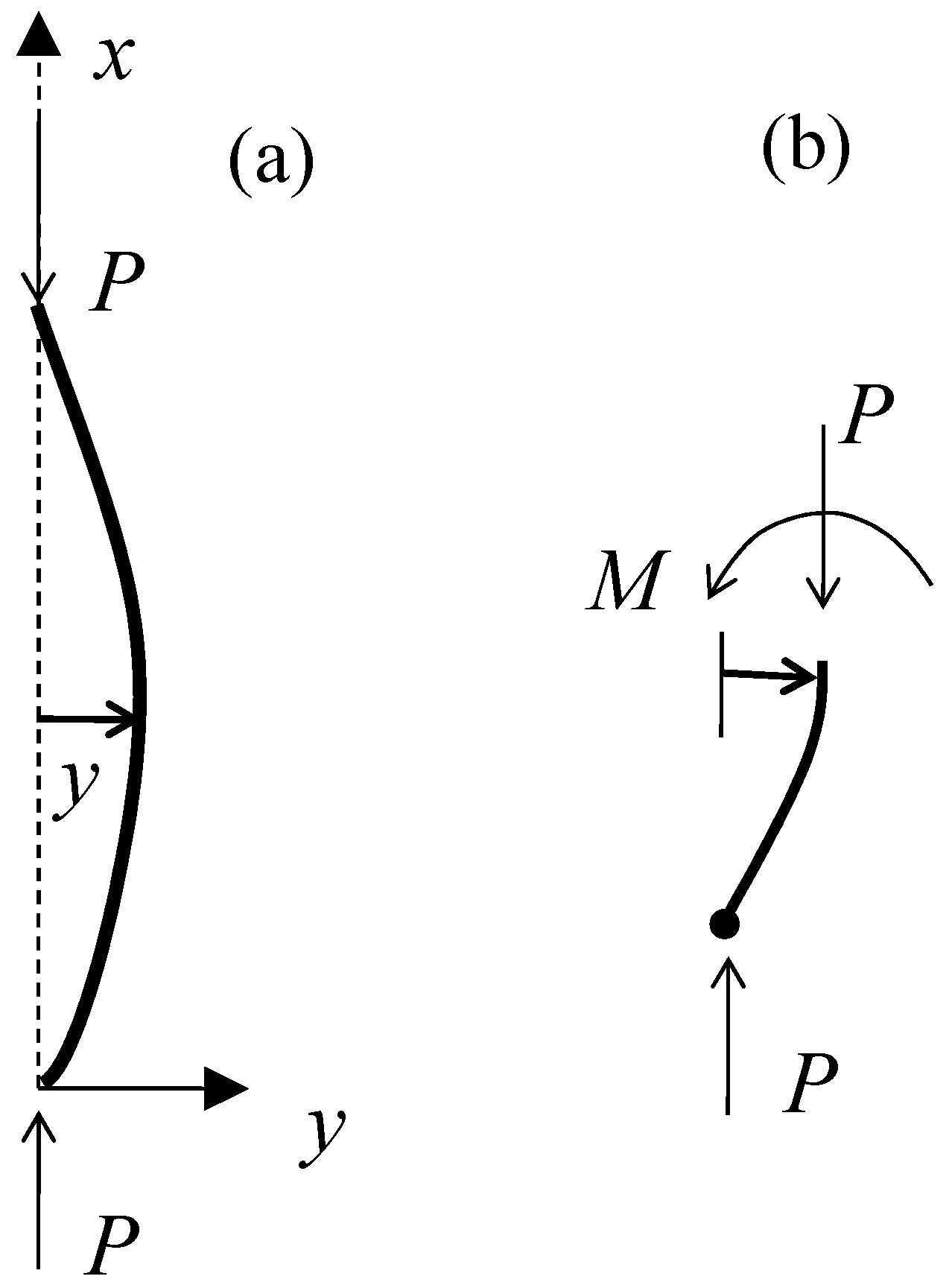
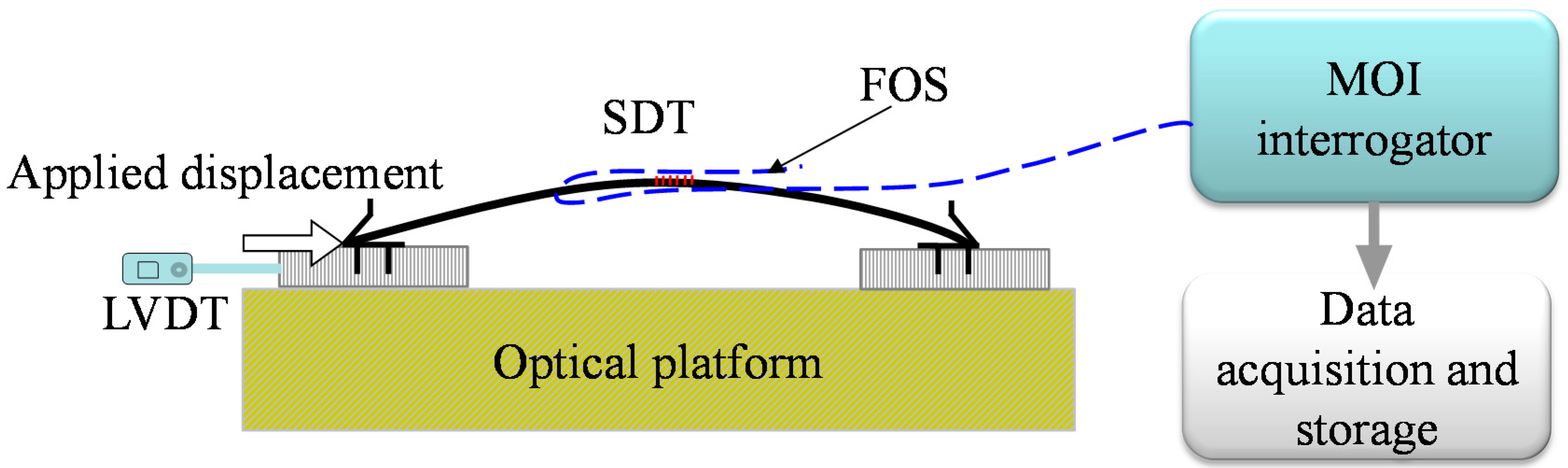
2.2. Principle of the SDT
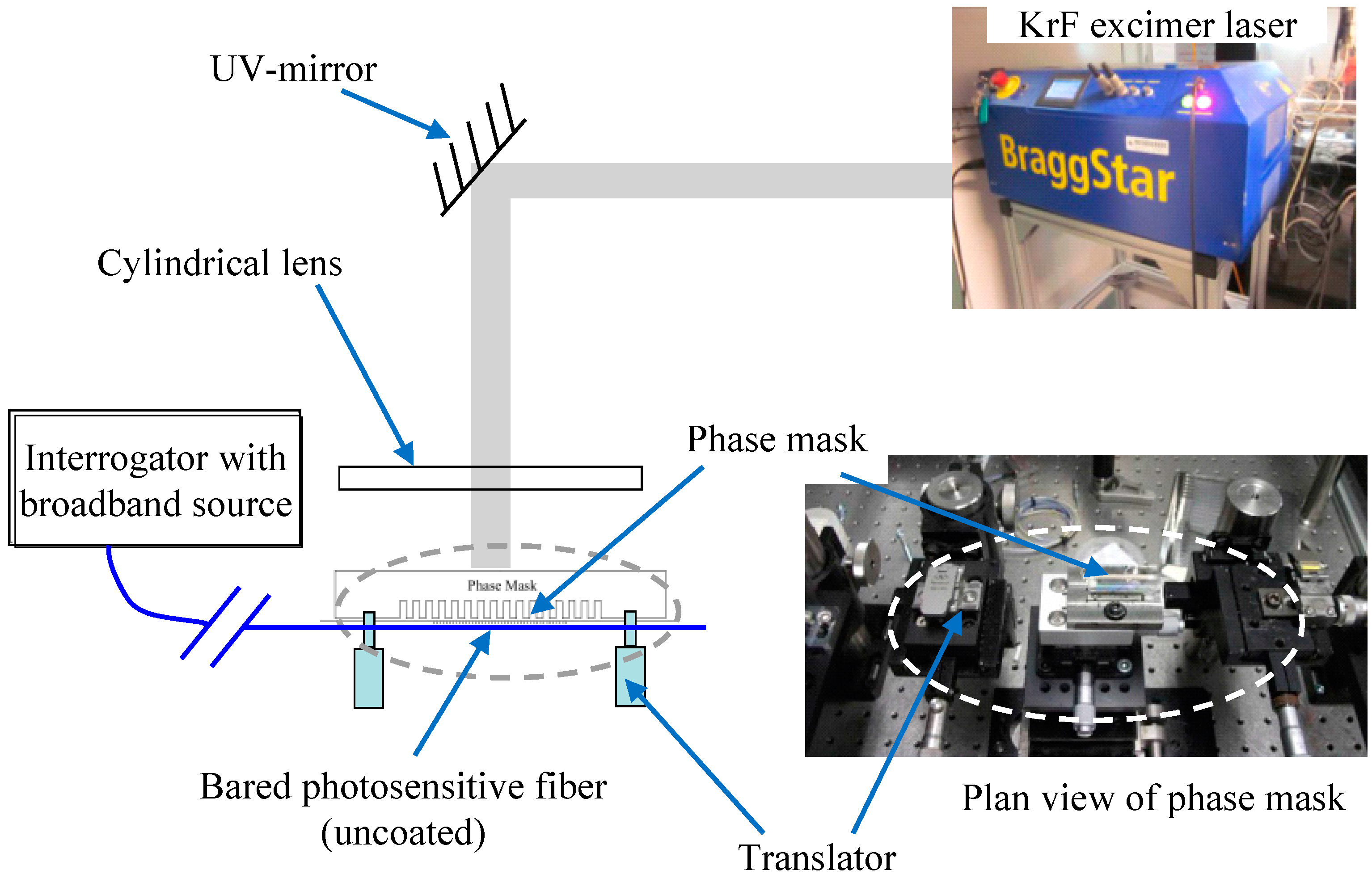
2.3. Fabrication of the SDT
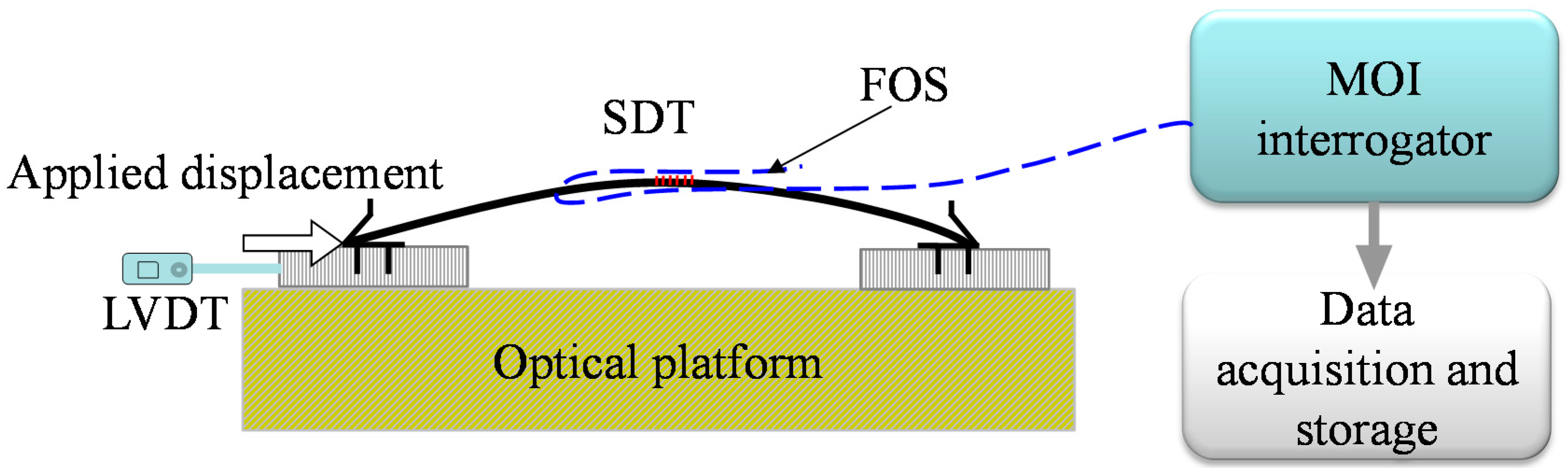
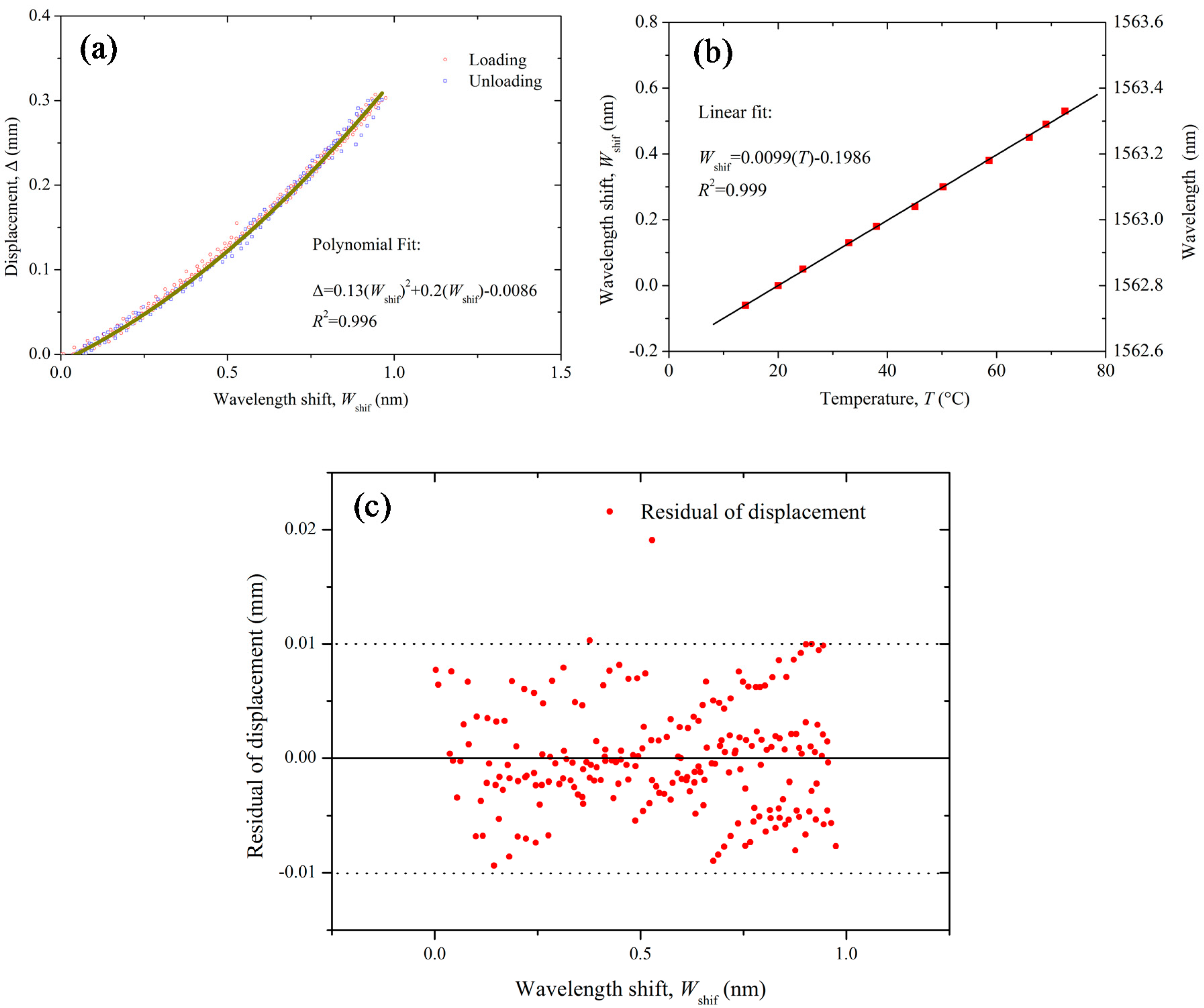
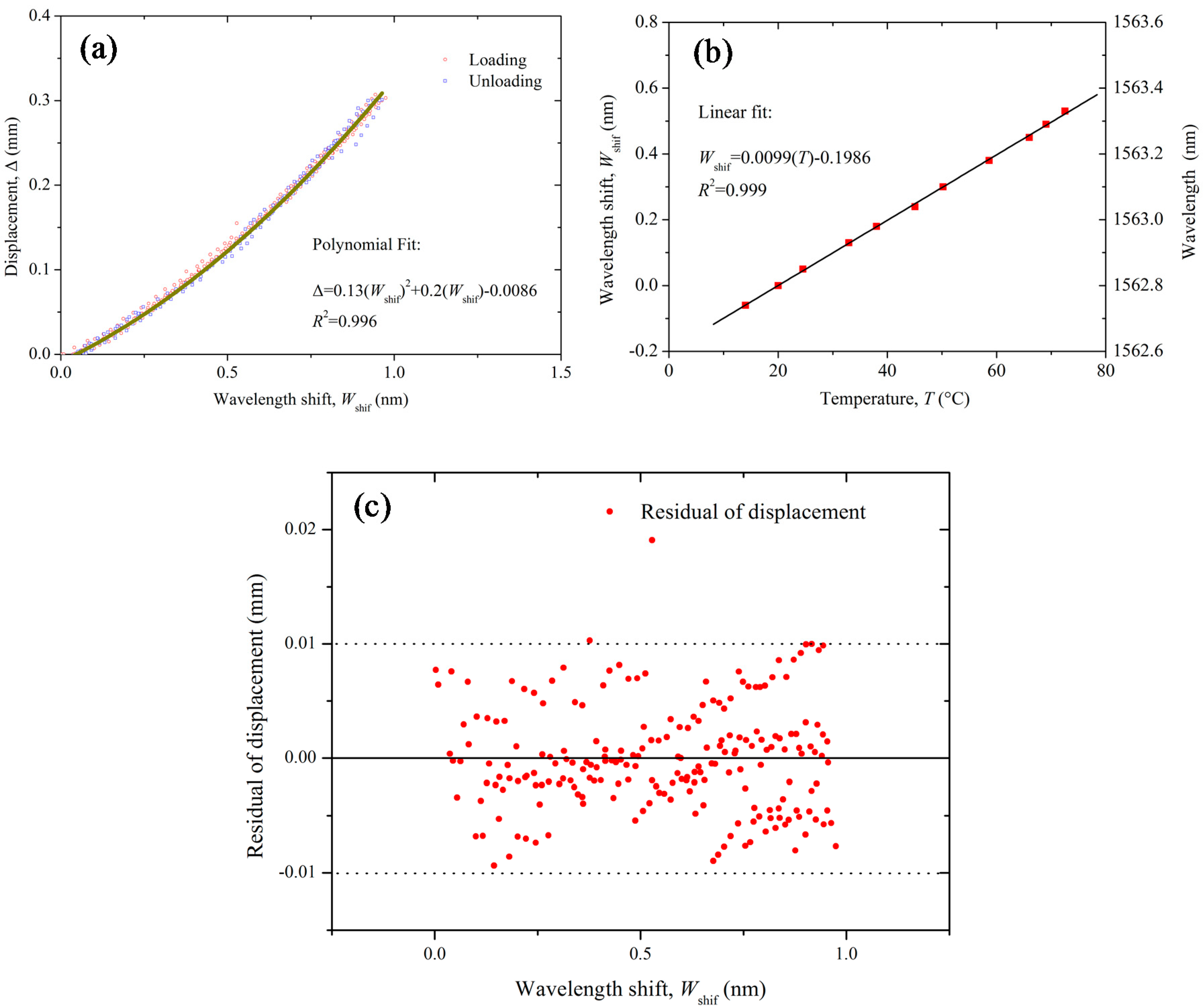
2.4. Calibration of the SDT
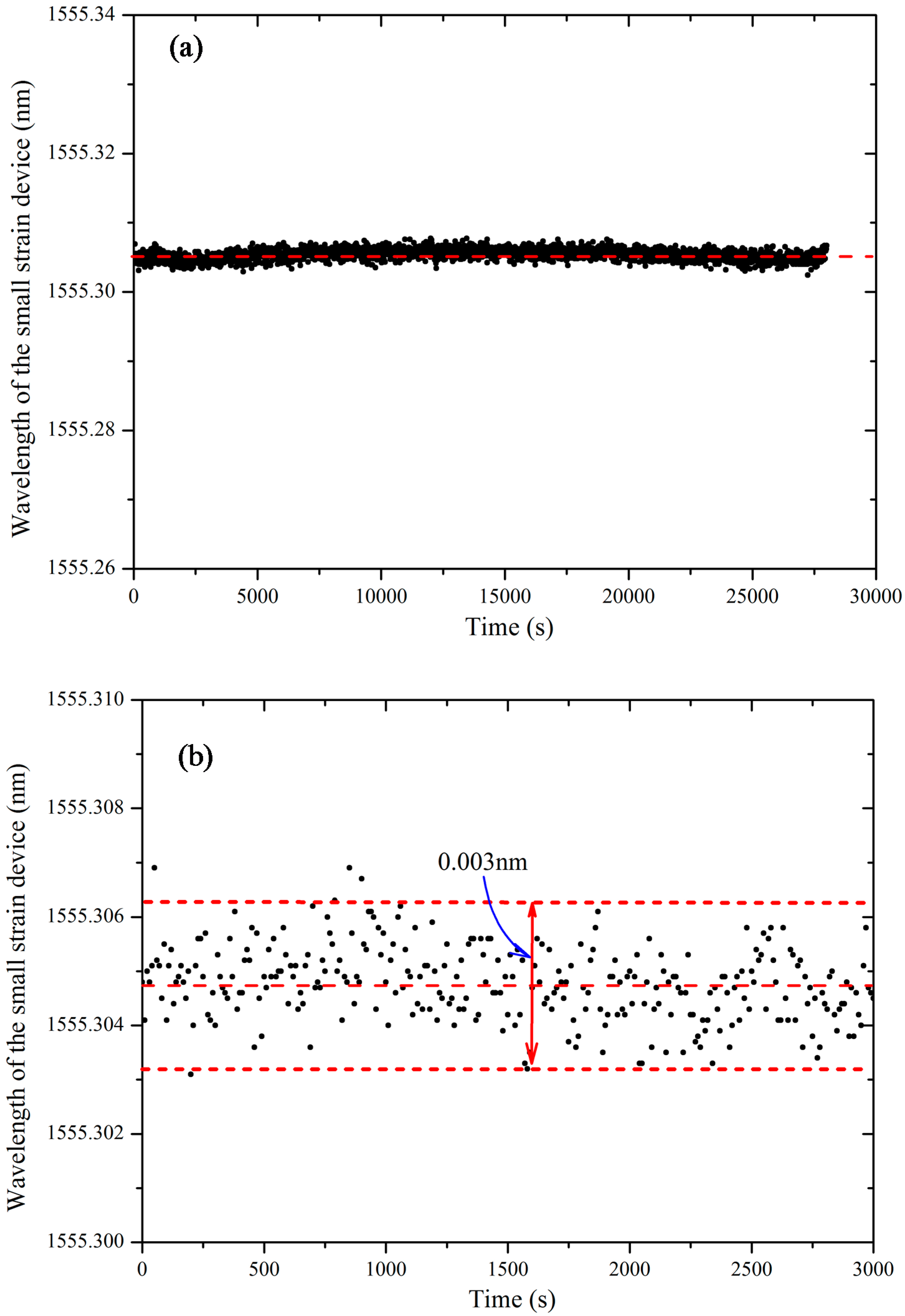
2.5. Stability and Error Analysis of the SDT
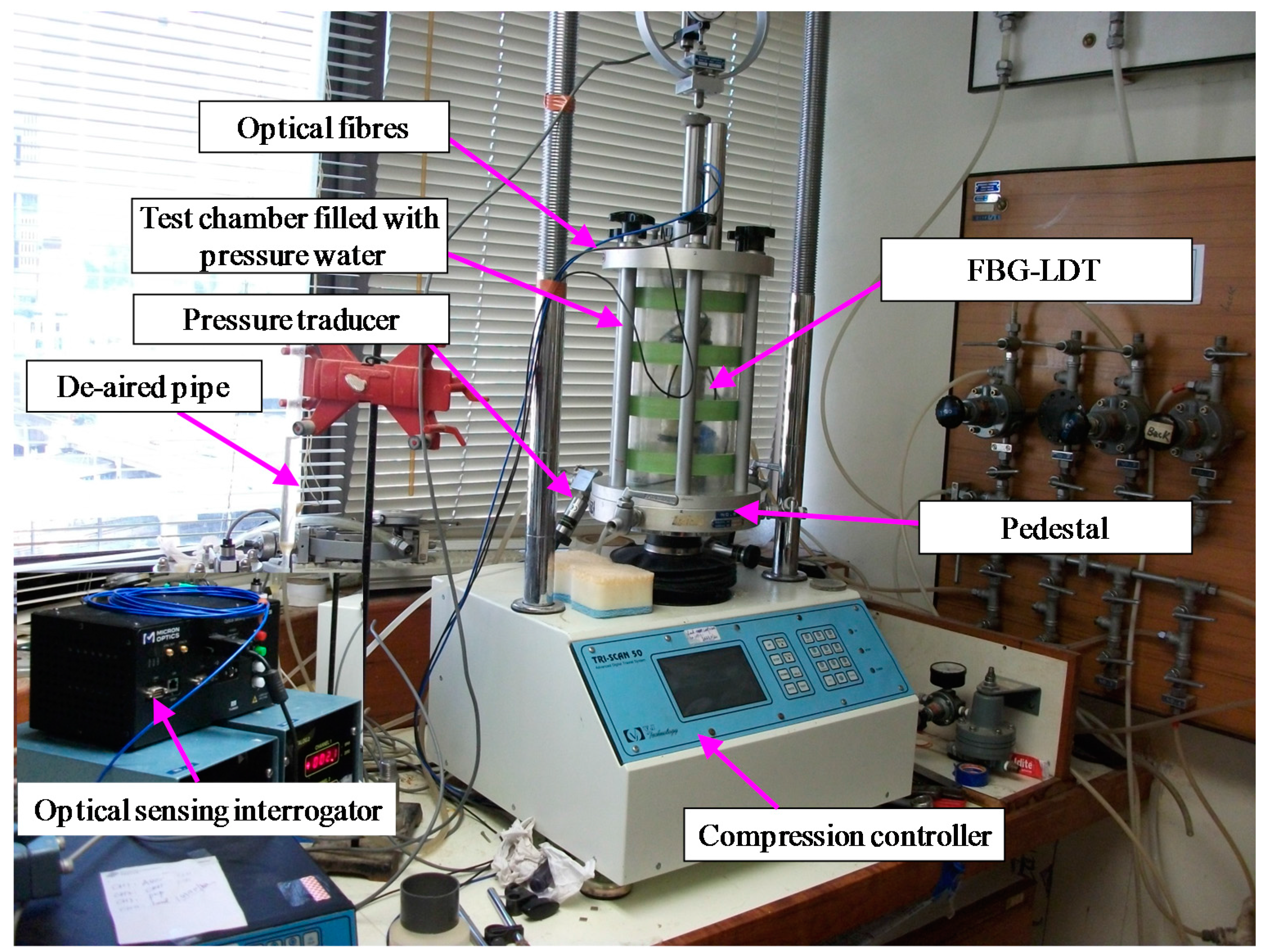
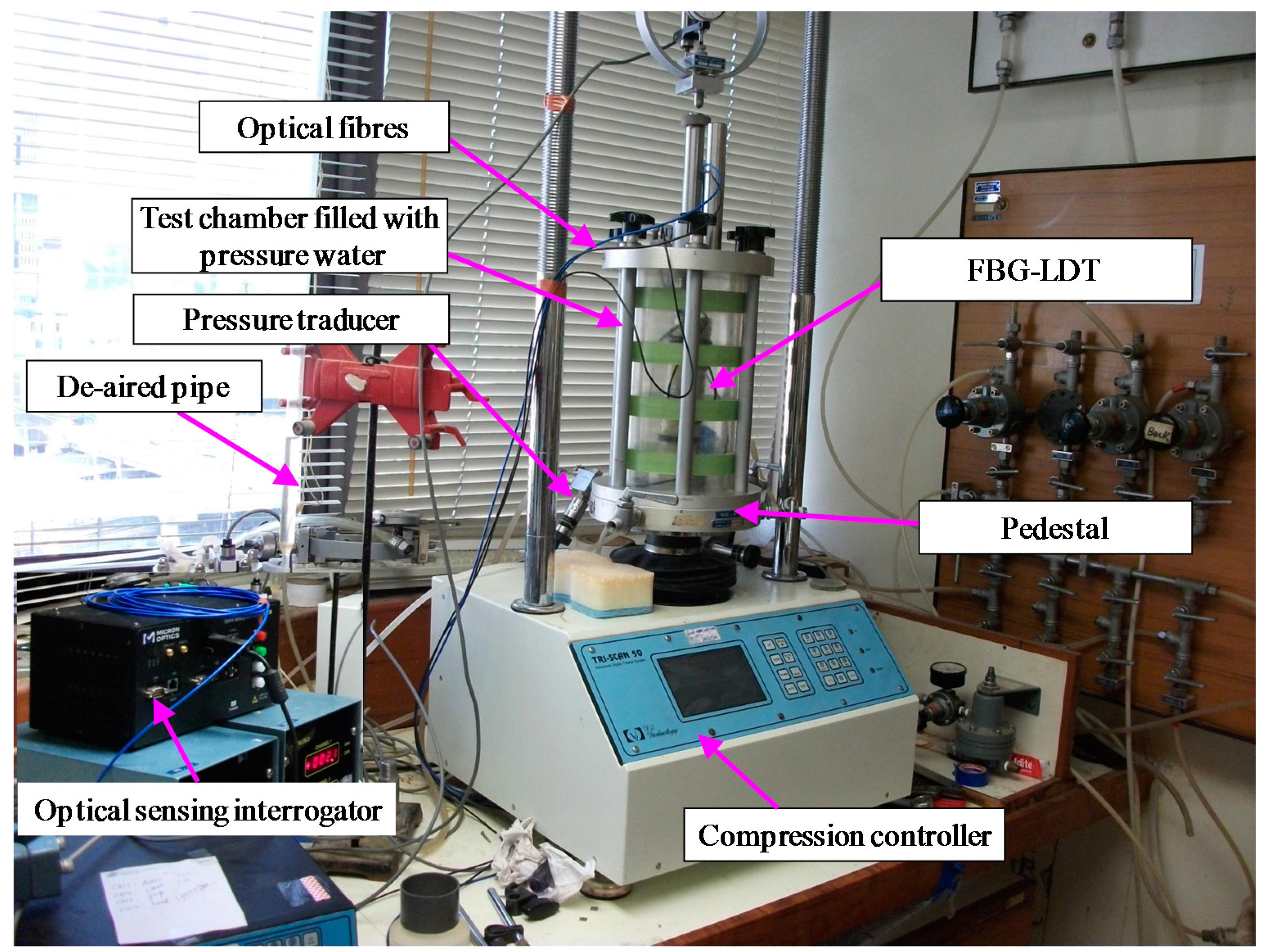
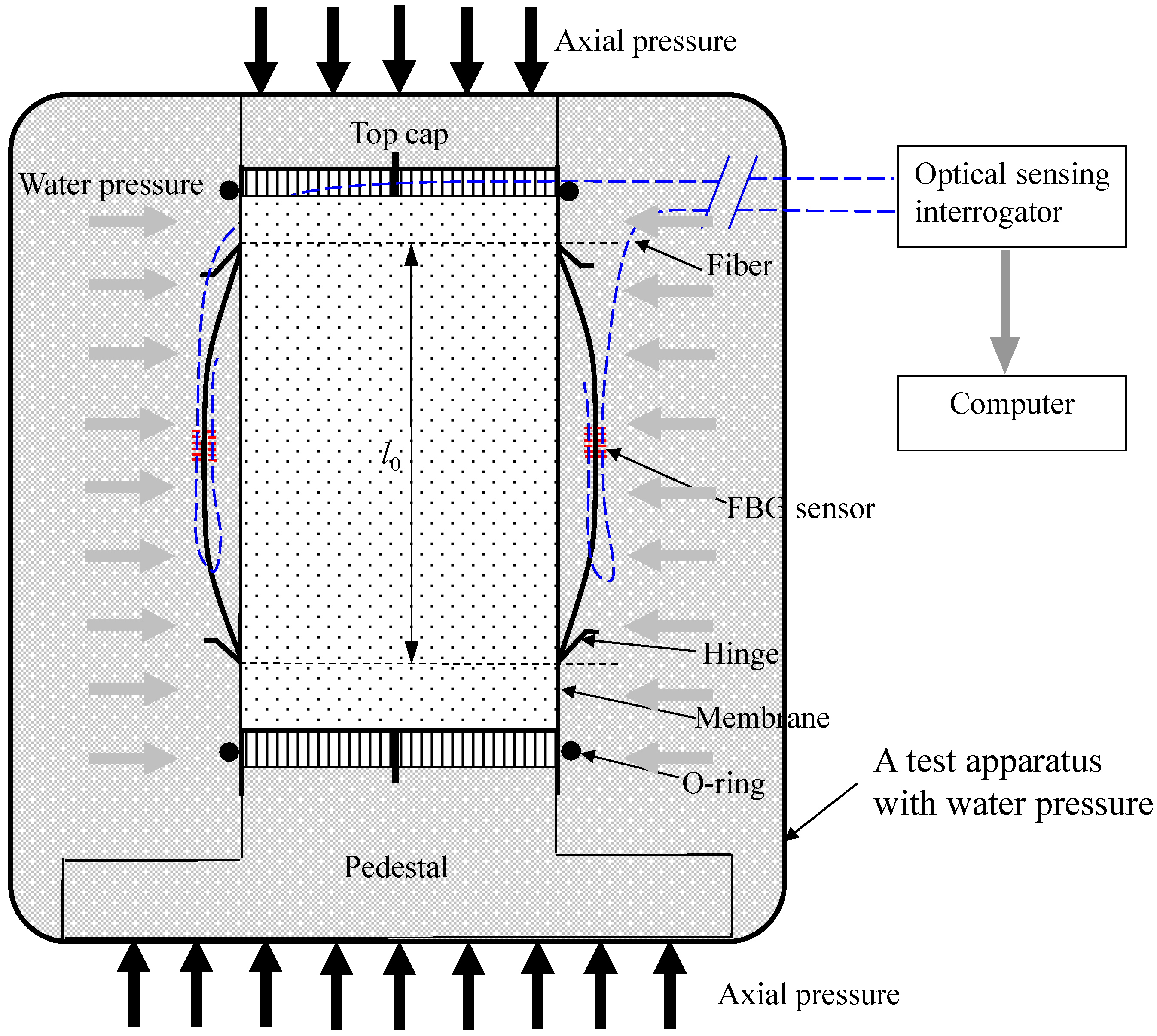
3. Experimental Setup
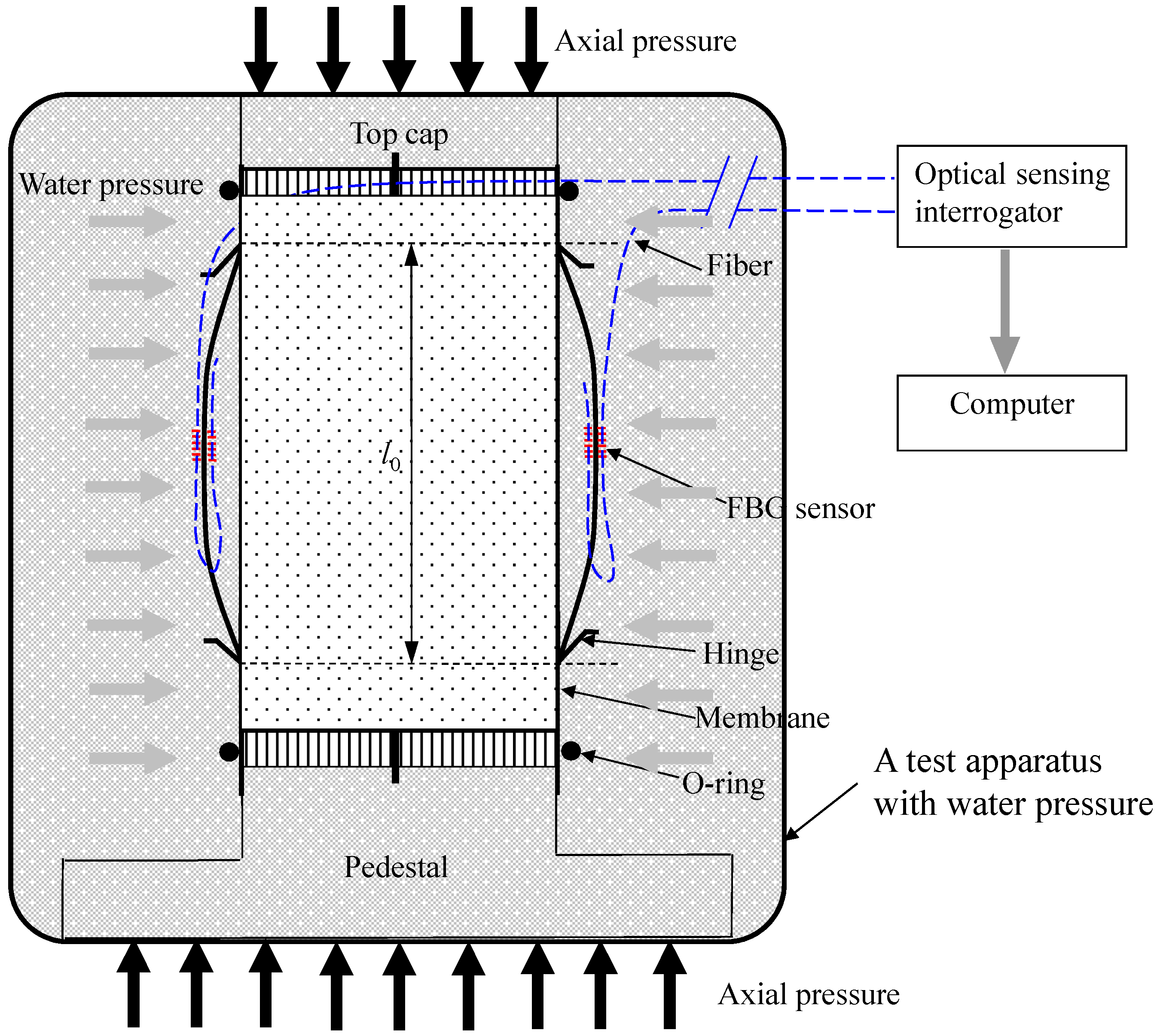
3.1. A Modified Test Apparatus with SDT
3.2. Properties of the Soil Specimen
3.3. Test Procedures
4. Test Results and Discussions
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Simpson, B.; O’Riordon, N.J.; Croft, D.D. A computer model for the analysis of ground movements in London Clay. Geotechnique 1979, 29, 149–175. [Google Scholar] [CrossRef]
- Jardine, R.J.; Symes, M.J.; Burland, J.B. The measurement of soil stiffness in triaxial apparatus. Geotechnique 1984, 34, 323–340. [Google Scholar] [CrossRef]
- Simpson, B. Retaining Structures: Displacement and Design. Geotechnique 1992, 42, 541–576. [Google Scholar] [CrossRef]
- Gasparre, A.; Coop, M. Techniques for performing small-strain probes in the triaxial apparatus. Geotechnique 2006, 56, 491–495. [Google Scholar] [CrossRef]
- Scholey, G.K.; Frost, J.D.; Presti, D.C.F.L.; Jamiolkowski, M. A review of instrumentation for measuring small strains during triaxial testing of soil specimens. Geotech. Test. J. 1995, 18, 137–156. [Google Scholar]
- Clayton, C.R.I. Stiffness at small strain: research and practice. Geotech. 2011, 61, 5–37. [Google Scholar] [CrossRef]
- Dyvik, R.; Madshus, C. Laboratory Measurements of Gmax Using Bender Elements. Adv. Eng. 1985, 161, 117–137. [Google Scholar]
- Leong, E.C.; Yeo, S.H.; Rahardjo, H. Measuring shear wave velocity using bender elements. Geotech. Test. J. 2005, 28, 488–498. [Google Scholar]
- Pennington, D.S.; Nash, D.F.T.; Lings, M.L. Anisotropy of G0 Shear Stiffness in Gault Clay. Geotechnique 1997, 47, 391–398. [Google Scholar] [CrossRef]
- Hird, C.C.; Yung, P.C.Y. The Use of Proximity Transducers for Local Strain Measurements in Triaxial Tests. Geotech. Test. J. 1989, 12, 292–298. [Google Scholar]
- Goto, S.; Tatsuoka, F.; Shibuya, S.; Kim, Y.S.; Sato, T. A Simple Gauge for Local Small Strain Measurement in the Laboratory. Soils Found. 1991, 31, 169–180. [Google Scholar] [CrossRef]
- Dasari, G.R.; Bolton, M.D.; Ng, C.W.W.N. Small Strain Measurement Using Modified LDTs; Report CUED/D/-SOILS/TR275 Geotechnical Group; Cambridge University: Cambridge, UK, 1995. [Google Scholar]
- Yimsiri, S.; Soga, K.; Chandler, S.G. Cantilever-Type Local Deformation Transducer for Local Axial Strain Measurement in Triaxial Test. Geotech. Test. J. 2005, 28, 445–451. [Google Scholar]
- Ibraim, E.; di Benedetto, H. New Local System of Measurement of Axial Strains for Triaxial Apparatus Using LVDT. Geotech. Test. J. 2005, 28, 436–444. [Google Scholar]
- Alwis, L.; Sun, T.; Grattan, K.T.V. Optical fibre-based sensor technology for humidity and moisture measurement: Review of recent progress. Measurement 2015, 46, 4052–4074. [Google Scholar] [CrossRef]
- Ho, Y.T.; Huang, A.B.; Lee, J.T. Development of a fibre Bragg grating sensored ground movement monitoring system. Meas. Sci. Technol. 2006, 17, 1733–1740. [Google Scholar] [CrossRef]
- Xu, D.S.; Yin, J.H.; Cao, Z.Z.; Wang, Y.L.; Zhu, H.H.; Pei, H.F. A new flexible FBG sensing beam for measuring dynamic lateral displacements of soil in a shaking table test. Measurement 2013, 46, 200–209. [Google Scholar] [CrossRef]
- Zhu, H.H.; Shi, B.; Yan, J.F.; Zhang, J.; Zhang, C.C.; Wang, B.J. Fiber Bragg grating-based performance monitoring of a slope model subjected to seepage. Smart Mater. Struct. 2014, 23, 095027. [Google Scholar] [CrossRef]
- Zhu, H.H.; Shi, B.; Yan, J.F.; Zhang, J.; Wang, J. Investigation of the evolutionary process of a reinforced model slope using a fiber-optic monitoring network. Eng. Geol. 2015, 186, 34–43. [Google Scholar] [CrossRef]
- Pei, H.F.; Yin, J.H.; Zhu, H.H.; Hong, C.Y.; Wei, J.; Xu, D.S. Monitoring of lateral displacements of a slope using a series of special fibre Bragg grating-based in-place inclinometers. Meas. Sci. Technol. 2012, 23, 025007. [Google Scholar] [CrossRef]
- Xu, D.S.; Yin, J.H. Analysis of excavation induced stress distributions of GFRP anchors in a soil slope using distributed fiber optic sensors. Eng. Geol. 2016, 213, 55–63. [Google Scholar] [CrossRef]
- Hill, K.O.; Fujii, F.; Johnson, D.C.; Kawasaki, B.S. Photosensitivity on optical fiber waveguides: Application to reflection filter fabrication. Appl. Phys. Lett. 1978, 32, 647–649. [Google Scholar] [CrossRef]
- Xu, D.S. Development of Two Optical Fiber Sensing Technologies and Applications in Monitoring Geotechnical Structures. Ph.D. Thesis, The Hong Kong Polytechnic University, Hong Kong, China, 2014. [Google Scholar]


© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, D.-S. A New Measurement Approach for Small Deformations of Soil Specimens Using Fiber Bragg Grating Sensors. Sensors 2017, 17, 1016. https://doi.org/10.3390/s17051016
Xu D-S. A New Measurement Approach for Small Deformations of Soil Specimens Using Fiber Bragg Grating Sensors. Sensors. 2017; 17(5):1016. https://doi.org/10.3390/s17051016
Chicago/Turabian StyleXu, Dong-Sheng. 2017. "A New Measurement Approach for Small Deformations of Soil Specimens Using Fiber Bragg Grating Sensors" Sensors 17, no. 5: 1016. https://doi.org/10.3390/s17051016
APA StyleXu, D.-S. (2017). A New Measurement Approach for Small Deformations of Soil Specimens Using Fiber Bragg Grating Sensors. Sensors, 17(5), 1016. https://doi.org/10.3390/s17051016