
Design and Validation of a Breathing Detection System for Scuba Divers




Abstract
:1. Introduction
2. Materials and Methods
2.1. Subjects
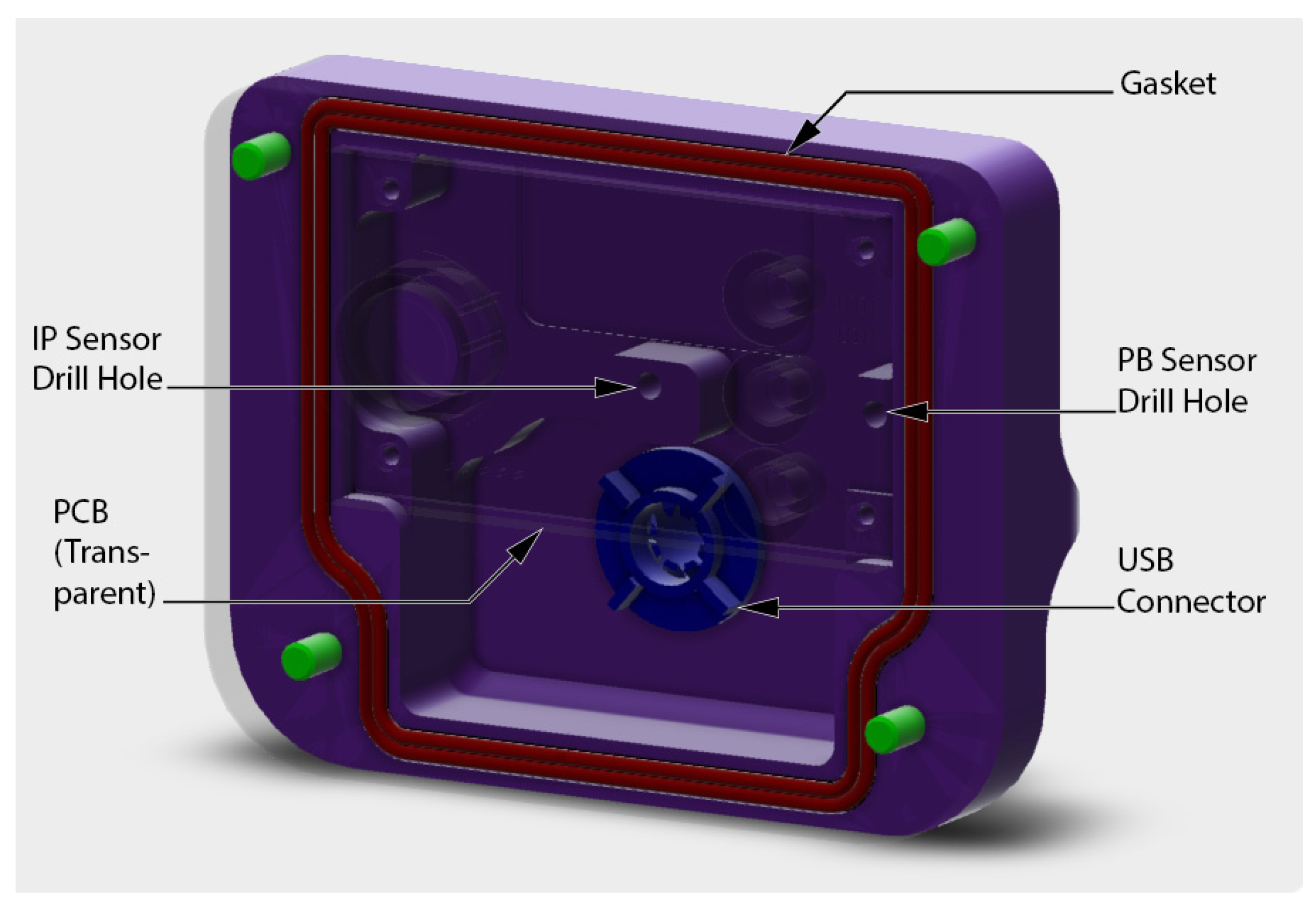
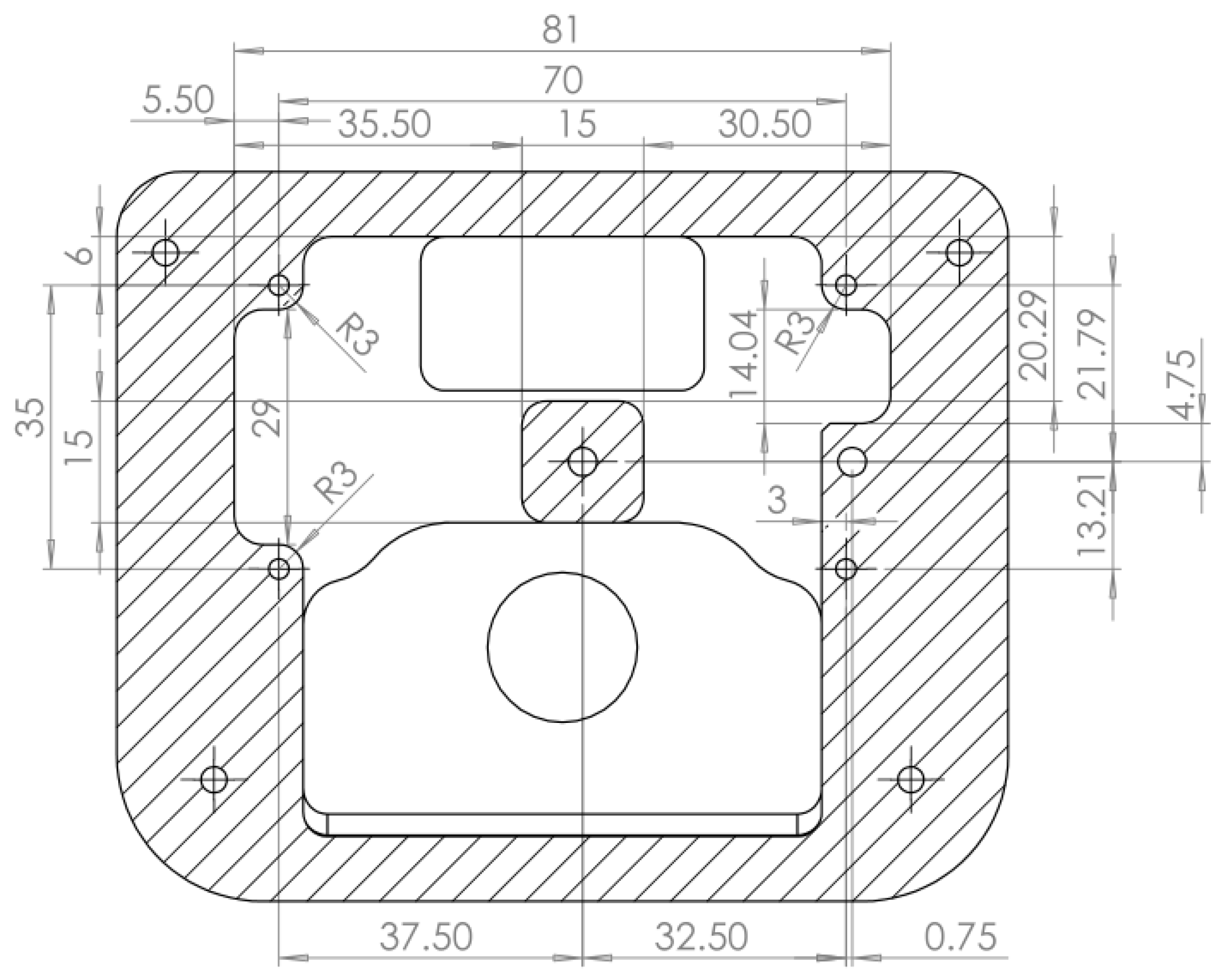
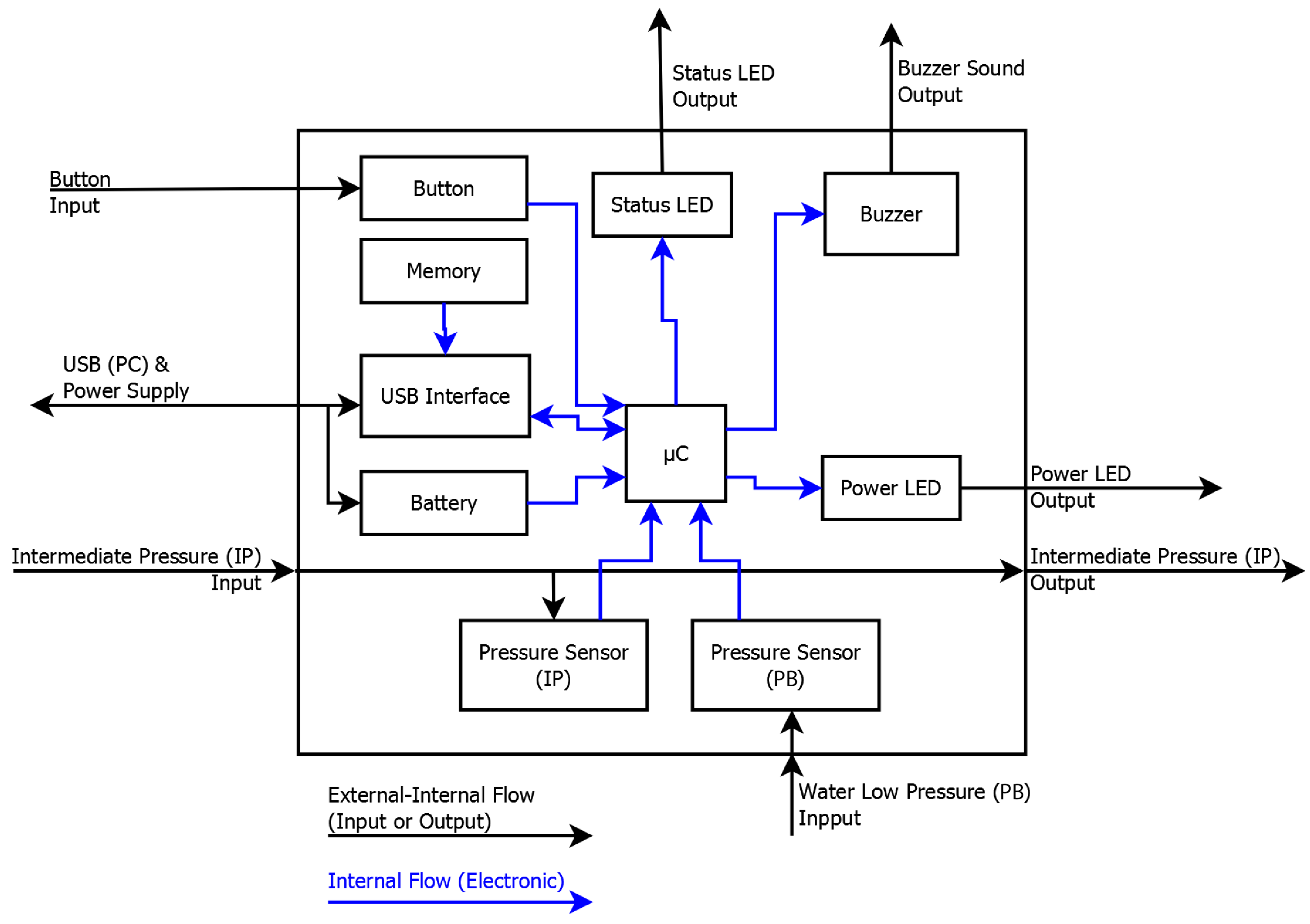
2.2. Recording System
2.3. Detection Algorithm
2.4. Experimental Procedure
2.5. Performance Analysis
2.6. Optimization
2.7. Validation
3. Results
3.1. Collected Data
3.2. Optimization
3.3. Algorithm Results
3.4. Validation
4. Discussion
4.1. Limitations
4.2. Applications
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| BC | Buoyancy compensator, Buoyancy compensator device or Buoyancy control device |
| DAN | Divers Alert Network |
| DSP | Digital signal processor or digital signal processing |
| ECG | Electrocardiogram |
| FN | False negative event detected |
| FP | False positive event detected |
| IP | Intermediate pressure |
| OEM | Original equipment manufacturer |
| PB | Ambient pressure (absolute) |
| PC | Personal computer |
| RAM | Random-access memory |
| RF | Radio frequency |
| SD | Standard deviation |
| SCUBA | Self-contained underwater breathing apparatus |
| TN | True negative event detected |
| TP | True positive event detected |
References
- Diving Equipment and Marketing Association (DEMA). Fast Facts: Recreational Scuba Diving and Snorkeling; DEMA: Las Vegas, NV, USA, 2014. [Google Scholar]
- Buzzacott, P. Annual Diving Report—A Report on 2014 Data on Diving Fatalities, Injuries, and Incidents; Technical Report; Divers Alert Network: Durham, NC, USA, 2016. [Google Scholar]
- Trout, B.M.; Caruso, J.L.; Nelson, C.; Denoble, P.J.; Nord, D.A.; Chimiak, J.; Martina, S.D.; Nochetto, M.; Pollock, N.W.; Lippmann, J.; et al. Annual Diving Report—A Report on 2010–2013 Data on Diving Fatalities, Injuries, and Incidents; Technical Report; Divers Alert Network: Durham, NC, USA, 2015. [Google Scholar]
- Naval Sea Systems Command. U.S. Navy Diving Manual; Revision 7; Direction of commander, Naval Sea Systems Command: Washington, DC, USA, 2016. [Google Scholar]
- Monitoring Sub-Committee of Diving Medical Advisory Committee. In-Water Diver Monitoring; Technical Report; Monitoring Sub-Committee of Diving Medical Advisory Committee: London, UK, 1979. [Google Scholar]
- Kynor, B.; David, A.E.W. Diver Health Monitoring System; Creare LLC: Hanover, NH, USA, 2011. [Google Scholar]
- Unnikrishna Menon, K.A.; Shibina, J.S.; Menon, V.N. Intelligent system for remote health monitoring of divers using underwater acoustic communication. In Proceedings of the Fifth International Conference on Computing, Communications and Networking Technologies (ICCCNT), Hefei, China, 11–13 July 2014. [Google Scholar]
- Cibis, T.; Groh, B.H.; Gatermann, H.; Leutheuser, H.; Eskofier, B.M. Wearable real-time ecg monitoring with emergency alert system for scuba diving. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 6074–6077. [Google Scholar]
- Fell, R.B.; Skutt, H.R.; Waterfield, A. A four-channel ultrasonic telemetry system for obtaining physiological data from ocean divers. Biotelemetry 1974, 1, 50–59. [Google Scholar] [PubMed]
- Kanwisher, J.; Lawson, K.; Strauss, R. Acoustic telemetry from human divers. Undersea Biomed. Res. 1974, 1, 99–109. [Google Scholar] [PubMed]
- Pieri, M.; Cialoni, D.; Marroni, A. Continuous Real-Time Monitoring and Recording of Glycemia during Scuba Diving: Pilot Study; Undersea & Hyperbaric Medical Society: West Palm Beach, FL, USA, 2016; pp. 265–272. [Google Scholar]
- Gooden, B.A.; Feinstein, R.; Skutt, H.R. Heart rate responses of scuba divers via ultrasonic telemetry. Undersea Biomed. Res. 1975, 2, 11–19. [Google Scholar] [PubMed]
- Korenbaum, V.I.; Gorovoy, S.V.; Tagiltsev, A.A.; Kostiv, A.E.; Borodin, A.E.; Pochekutova, I.A.; Vasilistov, A.M.; Krupenkov, A.C.; Shiryaev, A.D.; Vlasov, D.I. The possibility of passive acoustic monitoring of a Scuba Diver. Dokl. Earth Sci. 2016, 466, 187–190. [Google Scholar] [CrossRef]
- Sharma, N.S.; Yakubovskiy, A.M.; Zimmerman, M.J. SCUBA diver detection and classification in active and passive sonars—A unified approach. In Proceedings of the 2013 IEEE International Conference on Technologies for Homeland Security (HST), Waltham, MA, USA, 12–14 November 2013; pp. 189–194. [Google Scholar]
- Donskoy, D.; Imas, L.; Yen, T.; Sedunov, N.; Tsionskiy, M.; Sedunov, A. Turbulence-Induced Acoustic Emission of SCUBA Breathing Apparatus. In Proceedings of the 18th International Symposium on Nonlinear Acoustics Nonlinear Acoustics—Fundamentals and Applications, Stockholm, Sweden, 7–10 July 2008; pp. 95–98. [Google Scholar]
- Donskoy, D.M.; Sedunov, N.A.; Sedunov, A.N.; Tsionskiy, M.A. Variability of SCUBA diver’s acoustic emission. In Proceedings of the Optics and Photonics in Global Homeland Security IV, Orlando, FL, USA, 16 March 2008. [Google Scholar]
- Alfaro-Poncea, M.; Argüellesb, A.; Chairez, I. Pattern recognition for electroencephalographic signals based on continuous neural networks. Neural Netw. 2016, 79, 88–96. [Google Scholar] [CrossRef] [PubMed]
- Ertuğrul, Ö.F.; Kaya, Y.; Tekin, R. A novel approach for SEMG signal classification with adaptive local binary patterns. Med. Biol. Eng. Comput. 2016, 54, 1137–3346. [Google Scholar] [CrossRef] [PubMed]
- O’Brien, R.J.; Fontana, J.M.; Ponso, N.; Molisani, L. A pattern recognition system based on acoustic signals for fault detection on composite materials. Eur. J. Mech. A Solids 2017, 64, 1–10. [Google Scholar] [CrossRef]
- Altepe, C.; Egi, S.M.; Ozyigit, T.; Pierleoni, P. Nerites-Underwater Monitoring System of Diver’s Respiration and Regulator Performance using Intermediate Pressure Signal. In Proceedings of the 9th International Joint Conference on Biomedical Engineering Systems and Technologies, Rome, Italy, 21 February 2016; pp. 119–124. [Google Scholar]
- Casson, A.J.; Luna, E.; Rodriguez-Villegas, E. Performance metrics for the accurate characterisation of interictal spike detection algorithms. J. Neurosci. Methods 2009, 177, 479–487. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Zhou, S.; Cui, J.H. Prospects and problems of wireless communication for underwater sensor networks. Wirel. Commun. Mob. Comput. 2008, 8, 977–994. [Google Scholar]
- Akyildiz, I.F.; Wang, P.; Sun, Z. Realizing Underwater Communication through Magnetic Induction. IEEE Commun. Mag. 2015, 53, 42–48. [Google Scholar] [CrossRef]
- Uema, H.; Matsumura, T.; Saito, S.; Murata, Y. Research and Development on Underwater Visible Light Communication Systems. Electron. Commun. Jpn. 2015, 98, 9–13. [Google Scholar] [CrossRef]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Wang, P.; Lina, S.C. SoftWater: Software-defined networking for next-generation underwater communication systems. Ad Hoc Netw. 2016, 46, 1–11. [Google Scholar] [CrossRef]
- Song, Y.; Tong, Z.; Cong, B.; Yu, X.; Kong, M.; Lin, A. A Combined Radio and Underwater Wireless Optical Communication System based on Buoys. In Proceedings of the 8th International Conference on Advanced Infocomm Technology, Hangzhou, China, 25–27 October 2015. [Google Scholar]
- Laurino, M.; Guerriero, L.; Allegrini, P.; Menicucci, D.; Mastorci, F.; Magrin, D.; Allotta, B.; Bedini, R.; Gemignani, A. Psycho-physiological tele-monitoring of human operators in commercial diving: The Life Support System in the SUONO project. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 194–197. [Google Scholar]
- Murat Egi, S.; Altepe, C.; Ozyigit, T. Scuba diving breathing and open-circuit regulator performance monitoring, warning and alarm system. Turkey Patent Application No. 2015/08200, 2 July 2015. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value | Unit |
|---|---|---|
| PB Sensing Resolution | 5.4 | mbar |
| Absolute Accuracy | ±100 | mbar |
| Sampling Rate | 1 | Hz |
| IP Sensing Resolution | 0.5 | mbar |
| Absolute Accuracy | ±100 | mbar |
| Sampling Rate | 20 | Hz |
| Maximum Depth | 100 | m |
| Dive | Diver | Tank | Max. Depth | Duration | Ni | TP | FP | FN | Sensitivity | R |
|---|---|---|---|---|---|---|---|---|---|---|
| Dive 1 | Diver 1 | Tank 1 | 6.6 m | 50 min | 505 | 494 | 5 | 11 | 97.8% | 1.0% |
| Dive 2 | Diver 1 | Tank 1 | 6.3 m | 57 min | 461 | 437 | 62 | 24 | 94.8% | 13.4% |
| Dive 3 | Diver 2 | Tank 2 | 4.5 m | 49 min | 881 | 854 | 30 | 27 | 96.9% | 3.4% |
| Dive 4 | Diver 2 | Tank 2 | 4.5 m | 49 min | 696 | 691 | 4 | 5 | 99.3% | 0.6% |
| Dive 5 | Diver 3 | Tank 1 | 6.4 m | 47 min | 673 | 640 | 19 | 33 | 95.1% | 2.8% |
| Dive 6 | Diver 3 | Tank 1 | 6.8 m | 49 min | 541 | 527 | 23 | 14 | 97.4% | 4.3% |
| Dive 7 | Diver 4 | Tank 1 | 6.5 m | 43 min | 698 | 653 | 18 | 45 | 93.6% | 2.6% |
| Dive 8 | Diver 4 | Tank 1 | 6.8 m | 55 min | 718 | 706 | 3 | 12 | 98.3% | 0.4% |
| Dive 9 | Diver 5 | Tank 1 | 5.9 m | 51 min | 770 | 768 | 3 | 2 | 99.7% | 0.4% |
| Dive 10 | Diver 5 | Tank 1 | 6.7 m | 55 min | 729 | 724 | 5 | 5 | 99.3% | 0.7% |
| Dive 11 | Diver 6 | Tank 1 | 6.8 m | 64 min | 908 | 866 | 15 | 42 | 95.4% | 1.7% |
| Dive 12 | Diver 6 | Tank 1 | 5.8 m | 69 min | 968 | 948 | 10 | 20 | 97.9% | 1.0% |
| Dive 13 | Diver 7 | Tank 1 | 5.7 m | 47 min | 879 | 861 | 3 | 18 | 98.0% | 0.3% |
| Dive 14 | Diver 7 | Tank 1 | 5.4 m | 50 min | 616 | 610 | 25 | 6 | 99.0% | 4.1% |
| Dive 15 | Diver 8 | Tank 2 | 4.7 m | 46 min | 592 | 580 | 16 | 12 | 98.0% | 2.7% |
| Dive 16 | Diver 8 | Tank 1 | 6.9 m | 50 min | 446 | 443 | 34 | 3 | 99.3% | 7.6% |
| Dive | Duration | Observer 1 vs. Obs. 2 | Observer 2 vs. Obs. 1 | ||||
|---|---|---|---|---|---|---|---|
| Ni | Sensitivity | R | Ni | Sensitivity | R | ||
| Dive 1 | 10.6 min | 129 | 93.0% | 7.8% | 130 | 96.9% | 2.3% |
| Dive 2 | 10.6 min | 108 | 88.0% | 14.8% | 111 | 97.3% | 0.9% |
| Dive 3 | 10.4 min | 194 | 94.5% | 4.6% | 193 | 97.9% | 2.6% |
| Dive 4 | 10.2 min | 174 | 94.3% | 6.9% | 176 | 98.3% | 0.6% |
| Dive 5 | 10.8 min | 172 | 98.3% | 2.3% | 173 | 99.4% | 0.6% |
| Dive 6 | 10.3 min | 170 | 97.1% | 2.4% | 169 | 98.2% | 2.4% |
| Dive 7 | 8.4 min | 150 | 92.7% | 6.0% | 148 | 97.3% | 4.1% |
| Dive 8 | 10.7 min | 161 | 87.0% | 13.0% | 161 | 95.7% | 4.3% |
| Dive 9 | 10.1 min | 181 | 95.6% | 4.4% | 181 | 99.4% | 0.6% |
| Dive 10 | 10.2 min | 163 | 95.7% | 3.7% | 162 | 99.4% | 1.2% |
| Dive 11 | 10.3 min | 136 | 91.2% | 5.9% | 132 | 91.7% | 11.3% |
| Dive 13 | 10.4 min | 214 | 95.3% | 7.5% | 220 | 95.4% | 1.8% |
| Dive 14 | 10.2 min | 144 | 97.9% | 1.4% | 144 | 100.0% | 0.7% |
| Dive 15 | 10.6 min | 136 | 97.1% | 3.7% | 137 | 97.1% | 2.2% |
| Dive 16 | 10.4 min | 102 | 98.0% | 2.9% | 103 | 99.0% | 1.0% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Altepe, C.; Egi, S.M.; Ozyigit, T.; Sinoplu, D.R.; Marroni, A.; Pierleoni, P. Design and Validation of a Breathing Detection System for Scuba Divers. Sensors 2017, 17, 1349. https://doi.org/10.3390/s17061349
Altepe C, Egi SM, Ozyigit T, Sinoplu DR, Marroni A, Pierleoni P. Design and Validation of a Breathing Detection System for Scuba Divers. Sensors. 2017; 17(6):1349. https://doi.org/10.3390/s17061349
Chicago/Turabian StyleAltepe, Corentin, S. Murat Egi, Tamer Ozyigit, D. Ruzgar Sinoplu, Alessandro Marroni, and Paola Pierleoni. 2017. "Design and Validation of a Breathing Detection System for Scuba Divers" Sensors 17, no. 6: 1349. https://doi.org/10.3390/s17061349
APA StyleAltepe, C., Egi, S. M., Ozyigit, T., Sinoplu, D. R., Marroni, A., & Pierleoni, P. (2017). Design and Validation of a Breathing Detection System for Scuba Divers. Sensors, 17(6), 1349. https://doi.org/10.3390/s17061349