Integrated Giant Magnetoresistance Technology for Approachable Weak Biomagnetic Signal Detections

Abstract
:1. Introduction
2. Integrated GMR Sensors towards BMSI
2.1. Physical Principles of GMR Multilayers
2.2. Progress in GMR with High Integration
- Miniaturized structures without sensitivity loss providing increased spatial resolution in weak biomagnetic fields sensing;
- Room-temperature operation without bulky cooling systems and the associated expensive costs;
3. BMSI towards High Resolution Portable Applications
3.1. Electrophysiological Basis of Biomagnetic Signals
3.2. Challenges for Approachable BMSI
4. Integrated GMR Technologies with Enhanced Performance
4.1. Elimination of 1/f Magnetic Noise in Low-Frequency Magnetic Sensing
4.2. Sensitivity Enhancement for High Spatial Resolution
5. Integrated GMR Systems for In Vivo/Vitro Biomagnetic Signal Detection
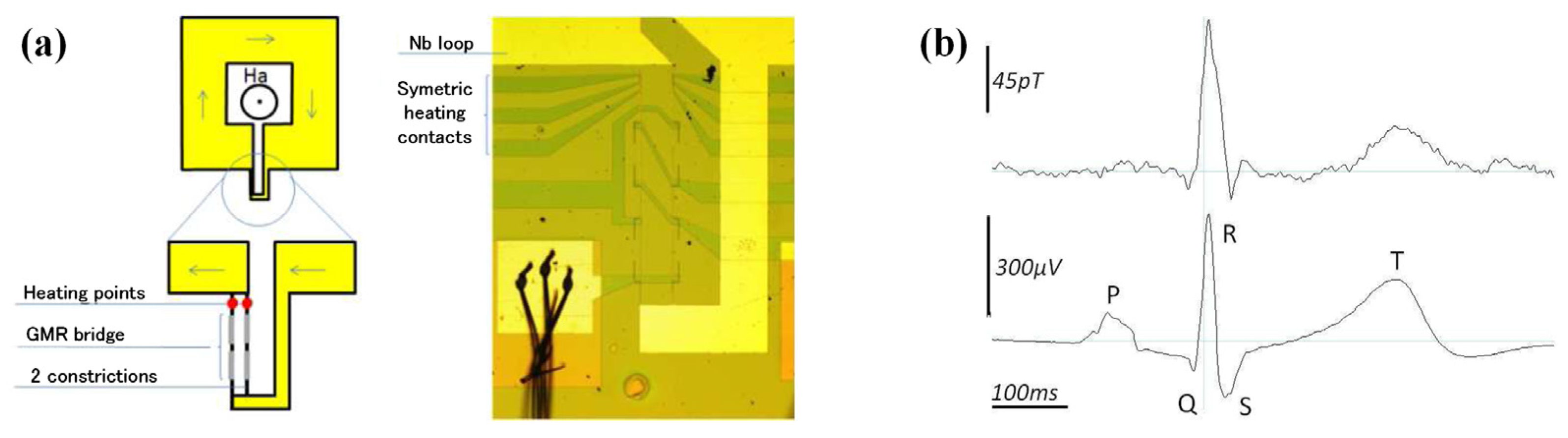
5.1. GMR-Superconducting Integrated Sensors for In Vivo MCG Measurements
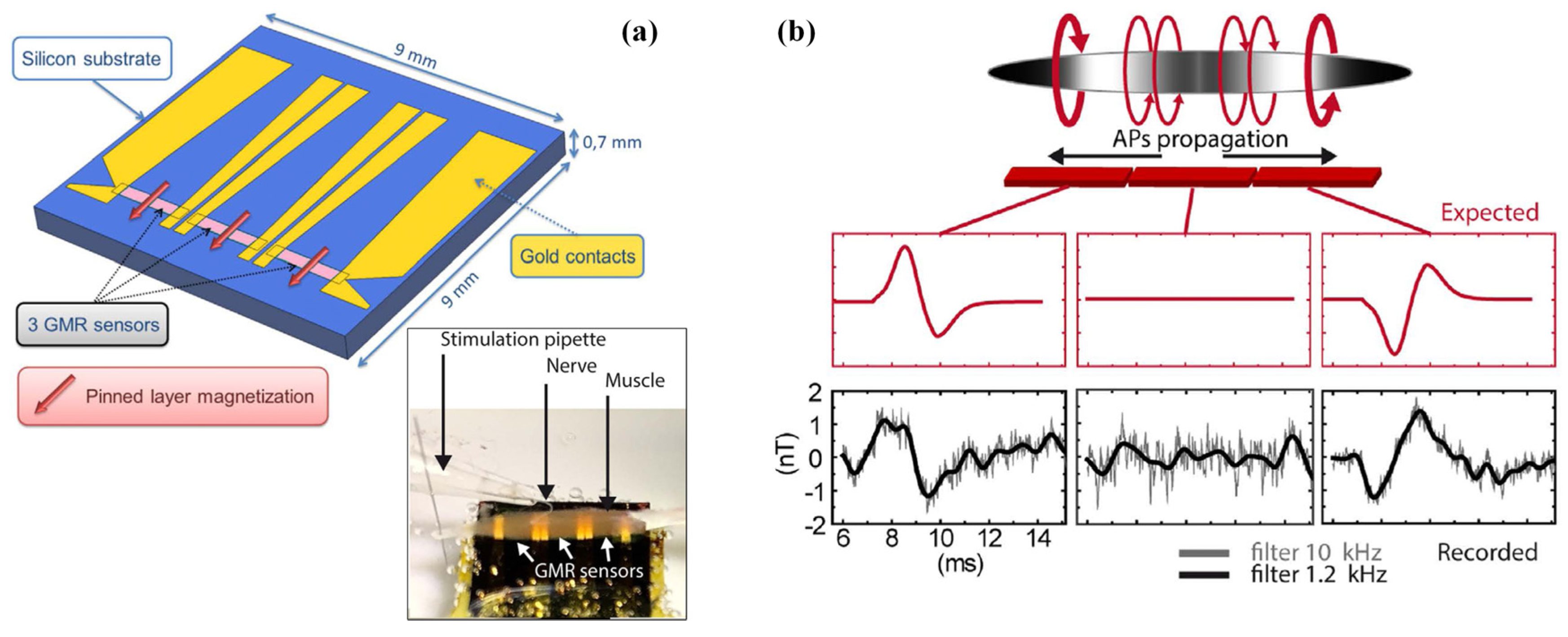
5.2. Integrated GMR-Based Microprobes for Biomagnetic Response
6. Conclusions
Acknowledgments
Conflicts of Interest
References
- Tavarozzi, I.; Comani, S.; Gratta, C.D.; Luzio, S.D.; Romani, G.L.; Gallina, S.; Zimarino, M.; Brisinda, D.; Fenici, R.; Caterina, R.D. Magnetocardiography: Current status and perspectives. Part II: Clinical applications. Ital. Heart J. 2002, 3, 151–165. [Google Scholar]
- Campiglio, P.; Caruso, L.; Paul, E.; Demonti, A.; Azizi-Rogeau, L.; Parkkonen, L.; Fermon, C.; Pannetier-Lecoeur, M. GMR-based sensors arrays for biomagnetic source imaging applications. IEEE Trans. Magn. 2012, 48, 3501–3504. [Google Scholar] [CrossRef]
- Koch, H. Recent advances in magnetocardiography. J. Electrocardiol. 2004, 37, 117–122. [Google Scholar] [CrossRef] [PubMed]
- Hansen, P.; Kringelbach, M.; Salmelin, R. MEG: An Introduction to Methods; Oxford University Press: New York, NY, USA, 2010. [Google Scholar]
- Rombetto, S.; Granata, C.; Vettoliere, A.; Russo, M. Multichannel system based on a high sensitivity superconductive sensor for magnetoencephalography. Sensors 2014, 14, 12114–12126. [Google Scholar] [CrossRef] [PubMed]
- Baillet, S.; Mosher, J.C.; Leahy, R.M. Electromagnetic Brain Mapping. IEEE Signal Process. Mag. 2001, 18, 14–30. [Google Scholar] [CrossRef]
- Ishii, S.; Kawabata, S.; Tomizawa, S.; Tomori, M.; Sakaki, K.; Shinomiya, K.; Sekihara, K.; Sato, T.; Adachi, Y.; Okawa, A. Conductive neuromagnetic fields in the lumbar spinal canal. Clin. Neurophysiol. 2012, 123, 1656–1661. [Google Scholar] [CrossRef] [PubMed]
- Sumiya, S.; Kawabata, S.; Hoshino, Y.; Adachi, Y.; Sekihara, K.; Tomizawa, S.; Tomori, M.; Ishii, S.; Sakaki, K.; Ukegawa, D.; et al. Magnetospinography visualizes electrophysiological activity in the cervical spinal cord. Sci. Rep. 2017, 7, 2192. [Google Scholar] [CrossRef] [PubMed]
- Cohen, D.; Givler, E. Magnetomyography: Magnetic fields around the human body produced by skeletal muscles. Appl. Phys. Lett. 1972, 21, 114–116. [Google Scholar] [CrossRef]
- Kawabata, S.; Shibuya, T.; Adachi, Y.; Sekihara, K.; Okawa, A. Measurement of magnetomyography using an array of magnetoresistive (MR) sensor. In Proceedings of the 20th International Conference on Biomagnetism (BIOMAG2016), Seoul, Korea, 1–6 October 2016. [Google Scholar]
- McClay, W.A.; Yadav, N.; Ozbek, Y.; Haas, A.; Attias, H.T.; Nagarajan, S.S. A Real-Time Magnetoencephalography Brain-Computer Interface Using Interactive 3D Visualization and the Hadoop Ecosystem. Brain Sci. 2015, 5, 419–440. [Google Scholar] [CrossRef] [PubMed]
- Fukuma, R.; Yanagisawa, T.; Saitoh, Y.; Hosomi, K.; Kishima, H.; Shimizu, T.; Sugata, H.; Yokoi, H.; Hirata, M.; Kamitani, Y. Real-Time Control of a Neuroprosthetic Hand by Magnetoencephalographic Signals from Paralysed Patients. Sci. Rep. 2016, 6, 21781. [Google Scholar] [CrossRef] [PubMed]
- Freitas, P.P.; Cardoso, F.A.; Martins, V.C.; Martins, S.A.M.; Loureiro, J.; Amaral, J.; Chaves, R.C.; Cardoso, S.; Fonseca, L.P.; Sebastiao, A.M. Spintronic platforms for biomedical applications. Lab Chip 2012, 12, 546–557. [Google Scholar] [CrossRef] [PubMed]
- Freitas, P.P.; Ferreira, R.; Cardoso, S. Spintronic Sensors. Proc. IEEE 2016, 104, 1894–1918. [Google Scholar] [CrossRef]
- Ennen, I.; Kappe, D.; Rempel, T.; Glenske, C.; Hutten, A. Giant Magnetoresistance Basic Concepts, Microstructure, Magnetic Interactions and Applications. Sensors 2016, 16, 904. [Google Scholar] [CrossRef] [PubMed]
- Binasch, G.; Grünberg, P.; Saurenbach, F.; Zinn, W. Enhanced magnetoresistance in layered magnetic structures with antiferromagnetic interlayer exchange. Phys. Rev. B 1989, 39, 4828–4830. [Google Scholar] [CrossRef]
- Baibich, M.N.; Broto, J.M.; Fert, A.; van Dau, F.N.; Petro, F.; Eitenne, P.; Creuzet, G.; Friederich, A.; Chazelas, J. Giant Magnetoresistance of (001)Fe/(001)Cr Magnetic Superlattices. Phys. Rev. Lett. 1988, 61, 2472. [Google Scholar] [CrossRef] [PubMed]
- Jogschies, L.; Klaas, D.; Kruppe, R.; Rittinger, J.; Taptimthong, P.; Wienecke, A.; Rissing, L.; Wurz, M.C. Recent Developments of Magnetoresistive Sensors for Industrial Applications. Sensors 2015, 15, 28665–28689. [Google Scholar] [CrossRef] [PubMed]
- Rifai, D.; Abdalla, A.N.; Razali, R.; Ali, K.; Faraj, M.A. An Eddy Current Testing Platform System for Pipe Defect Inspection Based on an Optimized Eddy Current Technique Probe Design. Sensors 2017, 17, 579. [Google Scholar] [CrossRef] [PubMed]
- Marchon, B.; Pitchford, T.; Hsia, Y.; Gangopadhyay, S. The head-disk interface roadmap to an areal density of 4 Tbit/in2. Adv. Tribol. 2013, 2013, 521086. [Google Scholar] [CrossRef]
- Amaral, J.; Cardoso, S.; Freitas, P.P.; Sebastião, A.M. Toward a system to measure action potential on mice brain slices with local magnetoresistive probes. J. Appl. Phys. 2011, 109, 07B308. [Google Scholar] [CrossRef]
- Amaral, J.; Gaspar, J.; Pinto, V.; Costa, T.; Sousa, N.; Cardoso, S.; Freitas, P. Measuring brain activity with magnetoresistive sensors integrated in micromachined probe needles. Appl. Phys. A 2013, 111, 407–412. [Google Scholar] [CrossRef]
- Costa, T.; Piedade, M.S.; Germano, J.; Amaral, J.; Freitas, P.P. A Neuronal Signal Detector for Biologically Generated Magnetic Fields. IEEE Trans. Instrum. Meas. 2014, 63, 1171–1180. [Google Scholar] [CrossRef]
- Cubells-Beltran, M.D.; Reig, C.; Madrenas, J.; De Marcellis, A.; Santos, J.; Cardoso, S.; Freitas, P.P. Integration of GMR Sensors with Different Technologies. Sensors 2016, 16, 939. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pannetier, M.; Fermon, C.; Le Goff, G.; Simola, J.; Kerr, E. Femtotesla magnetic field measurement with magnetoresistive sensors. Science 2004, 304, 1648–1650. [Google Scholar] [CrossRef] [PubMed]
- Pannetier, M.; Fermon, C.; Legoff, G.; Simola, J.; Kerr, E.; Welling, M.; Wijngaarden, R.J. Ultra-sensitive field sensors—An alternative to SQUIDs. IEEE Trans. Appl. Supercond. 2005, 15, 892–895. [Google Scholar] [CrossRef]
- Pannetier-Lecoeur, M.; Fermon, C.; Dyvorne, H.; Jacquinot, J.F.; Polovy, H.; Walliang, A.L. Magnetoresistive-superconducting mixed sensors for biomagnetic applications. J. Magn. Magn. Mater. 2010, 322, 1647–1650. [Google Scholar] [CrossRef]
- Valadeiro, J.; Silva, M.; Cardoso, S.; Martins, M.; Gaspar, J.; Freitas, P.P.; Sebastiao, A.M. Microneedles with integrated magnetoresistive sensors: A precision tool in biomedical instrumentation. In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017. [Google Scholar]
- Pannetier-Lecoeur, M.; Parkkonen, L.; Sergeeva-Chollet, N.; Polovy, H.; Fermon, C.; Fowley, C. Magnetocardiography with sensors based on giant magnetoresistance. Appl. Phys. Lett. 2011, 98, 153705. [Google Scholar] [CrossRef]
- Gregg, J.F.; Petej, I.; Jouguelet, E.; Dennis, C. Spin electronics-a review. J. Phys. D-Appl. Phys. 2002, 35, R121–R155. [Google Scholar] [CrossRef]
- Gijs, M.A.M.; Bauer, G.E.W. Perpendicular giant magnetoresistance of magnetic multilayers. Adv. Phys. 1997, 46, 285–445. [Google Scholar] [CrossRef]
- Barthélémy, A.; Fert, A.; Petroff, F. Chapter 1 Giant magnetoresistance in magnetic multilayers. In Handbook of Magnetic Materials; Elsevier: Amsterdam, The Netherlands, 1999; Volume 12, pp. 1–96. [Google Scholar]
- Dieny, B. Chapter 2—Spin valves. In Magnetoelectronics; Elsevier: Amsterdam, The Netherlands, 2004; pp. 67–149. [Google Scholar]
- Mott, N.F. The electrical conductivity of transition metals. Proc. R. Soc. A 1938, 167, 580–593. [Google Scholar] [CrossRef]
- White, R.L. Giant Magnetoresistance: A Primer. IEEE Trans. Magn. 1992, 28, 2482–2487. [Google Scholar] [CrossRef]
- Edwards, D.M.; Mathon, J.; Muniz, R.B. A resistor network theory of the giant magnetoresistance in magnetic superlattices. IEEE Trans. Magn. 1991, 27, 3548–3552. [Google Scholar] [CrossRef]
- Freitas, P.P.; Ferreira, R.; Cardoso, S.; Cardoso, F. Magnetoresistive sensors. J. Phys. Condens. Matter 2007, 19, 165221. [Google Scholar] [CrossRef]
- Cardoso, S.; Leitao, D.C.; Dias, T.M.; Valadeiro, J.; Silva, M.D.; Chicharo, A.; Silverio, V.; Gaspar, J.; Freitas, P.P. Challenges and trends in magnetic sensor integration with microfluidics for biomedical applications. J. Phys. D Appl. Phys. 2017, 50, 213001. [Google Scholar] [CrossRef]
- Krishna, V.D.; Wu, K.; Perez, A.M.; Wang, J.P. Giant Magnetoresistance-based Biosensor for Detection of Influenza A Virus. Front. Microbiol. 2016, 7, 400. [Google Scholar] [CrossRef] [PubMed]
- Dias, T.M.; Cardoso, F.A.; Martins, S.A.M.; Martins, V.C.; Cardoso, S.; Gaspar, J.F.; Monteiro, G.; Freitas, P.P. Implementing a strategy for on-chip detection of cell-free DNA fragments using GMR sensors: A translational application in cancer diagnostics using ALU elements. Anal. Methods 2016, 8, 119–128. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, W.; Yu, L.; Tu, L.; Feng, Y.; Klein, T.; Wang, J.P. Giant magnetoresistive-based biosensing probe station system for multiplex protein assays. Biosens. Bioelectron. 2015, 70, 61–68. [Google Scholar] [CrossRef] [PubMed]
- Cubells-Beltrán, M.D.; Reig, C.; Marcellis, A.D.; Figueras, E.; Yúfera, A.; Zadov, B.; Paperno, E.; Cardoso, S.; Freitas, P.P. Monolithic integration of Giant Magnetoresistance (GMR) devices onto standard processed CMOS dies. Microelectron. J. 2014, 45, 702–707. [Google Scholar] [CrossRef]
- Malmivuo, J.; Plonsey, R. Bioelectromagnetism-Principles and Applications of Bioelectric and Biomagnetic Fields; Oxford University Press: New York, NY, USA; Oxford, UK, 1995. [Google Scholar]
- Hamalainen, M.; Hari, R.; Ilmoniemi, R.J.; Knuutila, J.; Lounasmaa, O.V. Magnetoencephalography-theory, instrumentation, and applications to noninvasive studies of the working human brain. Rev. Mod. Phys. 1993, 65, 413–497. [Google Scholar] [CrossRef]
- Kamada, K.; Ito, Y.; Kobayashi, T. Human MCG measurements with a high-sensitivity potassium atomic magnetometer. Physiol. Meas. 2012, 33, 1063–1071. [Google Scholar] [CrossRef] [PubMed]
- Adachi, Y.; Kawabata, S.; Fujihira, J.; Uehara, G. Multi-Channel SQUID Magnetospinogram System With Closed-Cycle Helium Recondensing. IEEE Trans. Appl. Supercond. 2017, 27, 1600604. [Google Scholar] [CrossRef]
- Knappe, S.; Sander, T.H.; Kosch, O.; Wiekhorst, F.; Kitching, J.; Trahms, L. Cross-validation of microfabricated atomic magnetometers with superconducting quantum interference devices for biomagnetic applications. Appl. Phys. Lett. 2010, 97, 133703. [Google Scholar] [CrossRef]
- Tavarozzi, I.; Comani, S.; Del Gratta, C.; Romani, G.L.; Di Luzio, S.; Brisinda, D.; Gallina, S.; Zimarino, M.; Fenici, R.; De Caterina, R. Magnetocardiography current status and perspectives. Part I: Physical principles and instrumentation. Ital. Heart J. 2002, 3, 75–85. [Google Scholar] [PubMed]
- De Munck, J.C.; Huizenga, H.M.; Waldorp, L.J.; Heethaar, R.M. Estimating stationary dipoles from MEG/EEG data contaminated with spatially and temporally correlated background noise. IEEE Trans. Signal Process. 2002, 50, 1565–1572. [Google Scholar] [CrossRef]
- Tian, W.; Hu, J.; Pan, M.; Chen, D. Flux concentration and modulation based magnetoresistive sensor with integrated planar compensation coils. Rev. Sci. Instrum. 2013, 84, 035004. [Google Scholar] [CrossRef] [PubMed]
- Vrba, J.; Robinson, S.E. Signal processing in magnetoencephalography. Methods 2001, 25, 249–271. [Google Scholar] [CrossRef] [PubMed]
- Sternickel, K.; Braginski, A.I. Biomagnetism using SQUIDs: Status and perspectives. Supercond. Sci. Technol. 2006, 19, S160–S171. [Google Scholar] [CrossRef]
- Koch, H. SQUID magnetocardiography: Status and perspectives. IEEE Trans. Appl. Supercond. 2001, 11, 49–59. [Google Scholar] [CrossRef]
- Nurminen, J.; Taulu, S.; Nenonen, J.; Helle, L.; Simola, J.; Ahonen, A. Improving MEG Performance With Additional Tangential Sensors. IEEE Trans. Biomed. Eng. 2013, 60, 2559–2566. [Google Scholar] [CrossRef] [PubMed]
- Shen, H.M.; Lee, K.M.; Hu, L.; Foong, S.H.; Fu, X. Effects of Reconstructed Magnetic Field from Sparse Noisy Boundary Measurements on Localization of Active Neural Source. Med. Biol. Eng. Comput. 2016, 54, 177–189. [Google Scholar] [CrossRef] [PubMed]
- Nakamura, T.; Shirai, K.; Ono, Y.; Kasai, N.; Odawara, A.; Ishiyama, A. Biomagnetic Measurement System on Mice-Evaluation of System Performance by MCG and Application to MEG. In Proceedings of the 7th European Conference on Applied Superconductivity (EUCAS’05), Vienna, Austria, 11–15 September 2005; Volume 43, pp. 1219–1222. [Google Scholar] [CrossRef]
- Fenici, R.; Brisinda, D.; Meloni, A.M. Clinical application of magnetocardiography. Expert Rev. Mol. Diagn. 2005, 5, 291–313. [Google Scholar] [CrossRef]
- Alem, O.; Sander, T.H.; Mhaskar, R.; LeBlanc, J.; Eswaran, H.; Steinhoff, U.; Okada, Y.; Kitching, J.; Trahms, L.; Knappe, S. Fetal magnetocardiography measurements with an array of microfabricated optically pumped magnetometers. Phys. Med. Biol. 2015, 60, 4797–4811. [Google Scholar] [CrossRef] [PubMed]
- Iivanainen, J.; Stenroos, M.; Parkkonen, L. Measuring MEG closer to the brain: Performance of on-scalp sensor arrays. Neuroimage 2017, 147, 542–553. [Google Scholar] [CrossRef] [PubMed]
- Hari, R.; Parkkonen, L.; Nangini, C. The brain in time: Insights from neuromagnetic recordings. Ann. N. Y. Acad. Sci. 2010, 1191, 89–109. [Google Scholar] [CrossRef] [PubMed]
- Robbes, D. Highly sensitive magnetometers—A review. Sens. Actuators A 2006, 129, 86–93. [Google Scholar] [CrossRef]
- Kogan, S. Electronic Noise and Fluctuations in Solids; Cambridge University Press: Cambridge, UK, 2008. [Google Scholar]
- Fermon, C.; Pannetier-Lecoeur, M.; Biziere, N.; Cousin, B. Optimised GMR sensors for low and high frequencies applications. Sens. Actuators A 2006, 129, 203–206. [Google Scholar] [CrossRef]
- Nor, A.F.M.; Hill, E.W.; Parker, M.R. Geometry effects on low frequency noise in giant magnetoresistance (GMR) sensors. IEEE Trans. Magn. 1998, 34, 1327–1329. [Google Scholar] [CrossRef]
- Ozbay, A.; Gokce, A.; Flanagan, T.; Stearrett, R.A.; Nowak, E.R.; Nordman, C. Low frequency magnetoresistive noise in spin-valve structures. Appl. Phys. Lett. 2009, 94, 202506. [Google Scholar] [CrossRef]
- Hooge, F.N.; Hoppenbrouwers, A. 1/f noise in continuous gold films. Physica 1969, 45, 386–392. [Google Scholar] [CrossRef]
- Van de Veerdonk, R.J.M.; Belien, P.J.L.; Schep, K.M.; Kools, J.C.S.; de Nooijer, M.C.; Gijs, M.A.M.; Coehoorn, R.; de Jonge, W.J.M. 1/f noise in anisotropic and giant magnetoresistive elements. J. Appl. Phys. 1997, 82, 6152–6164. [Google Scholar] [CrossRef]
- Guedes, A.; Patil, S.B.; Cardoso, S.; Chu, V.; Conde, J.P.; Freitas, P.P. Hybrid magnetoresistive/microelectromechanical devices for static field modulation and sensor 1/f noise cancellation. J. Appl. Phys. 2008, 103, 07E924. [Google Scholar] [CrossRef]
- Edelstein, A.; Fisher, G.A. Minimizing 1/f noise in magnetic sensors using a microelectromechanical system flux concentrator. J. Appl. Phys. 2002, 91, 7795–7797. [Google Scholar] [CrossRef]
- Edelstein, A.S.; Burnette, J.E.; Fischer, G.A.; Olver, K.; Egelhoff, W., Jr.; Nowak, E.; Cheng, S.F. Validation of the microelectromechanical system flux concentrator concept for minimizing the effect of 1/f noise. J. Appl. Phys. 2009, 105, 07E720. [Google Scholar] [CrossRef]
- Edelstein, A.S.; Fischer, G.A.; Pedersen, M.; Nowak, E.R.; Cheng, S.F.; Nordman, C.A. Progress toward a thousandfold reduction in 1/f noise in magnetic sensors using an ac microelectromechanical system flux concentrator (invited). J. Appl. Phys. 2006, 99, 08B317. [Google Scholar] [CrossRef]
- Guedes, A.; Jaramillo, G.; Buffa, C.; Vigevani, G.; Cardoso, S.; Leitao, D.C.; Freitas, P.P.; Horsley, D.A. Towards picoTesla Magnetic Field Detection Using a GMR-MEMS Hybrid Device. IEEE Trans. Magn. 2012, 48, 4115–4118. [Google Scholar] [CrossRef]
- Hu, J.; Pan, M.; Tian, W.; Chen, D.; Zhao, J.; Luo, F. 1/f noise suppression of giant magnetoresistive sensors with vertical motion flux modulation. Appl. Phys. Lett. 2012, 100, 244102. [Google Scholar] [CrossRef]
- Hu, J.; Tian, W.; Zhao, J.; Pan, M.; Chen, D.; Tian, G. Remedying magnetic hysteresis and 1/f noise for magnetoresistive sensors. Appl. Phys. Lett. 2013, 102, 054104. [Google Scholar] [CrossRef]
- Tian, W.; Hu, J.; Pan, M.; Chen, D.; Zhao, J. Magnetic flux vertical motion modulation for 1/f noise suppression in magnetoresistance field sensors using mems device. IEEE Trans. Magn. 2016, 52, 4000306. [Google Scholar] [CrossRef]
- Klaasse, G.; Puers, R.; Tilmans, H.A.C. Piezoelectric versus electrostatic actuation for a capacitive RF-MEMS switch. In Proceedings of the 3rd Workshop on Semiconductor Sensor and Actuator, Leuven, Belgium, 29 November 2002; pp. 631–634. [Google Scholar]
- Zheng, Y.; You, D.; Wu, Y. Flux-enhanced giant magnetoresistive head design and simulation. IEEE Trans. Magn. 2002, 38, 2268–2270. [Google Scholar] [CrossRef]
- Coelho, P.; Leitao, D.C.; Antunes, J.; Cardoso, S.; Freitas, P.P. Spin Valve Devices With Synthetic-Ferrimagnet Free-Layer Displaying Enhanced Sensitivity for Nanometric Sensors. IEEE Trans. Magn. 2014, 50, 4401604. [Google Scholar] [CrossRef]
- Pannetier, M.; Fermon, C.; Le Goff, G.; Simola, J.; Kerr, E.; Coey, J.M.D. Noise in small magnetic systems—Applications to very sensitive magnetoresistive sensors. J. Magn. Magn. Mater. 2005, 290–291, 1158–1160. [Google Scholar] [CrossRef]
- Leitao, D.C.; Gameiro, L.; Silva, A.V.; Cardoso, S.; Freitas, P.P. Field Detection in Spin Valve Sensors Using CoFeB/Ru Synthetic-Antiferromagnetic Multilayers as Magnetic Flux Concentrators. IEEE Trans. Magn. 2012, 48, 3847–3850. [Google Scholar] [CrossRef]
- Leitao, D.C.; Coelho, P.; Borme, J.; Knudde, S.; Cardoso, S.; Freitas, P.P. Ultra-Compact 100 × 100 μm2 Footprint Hybrid Device with Spin-Valve Nanosensors. Sensors 2015, 15, 30311–30318. [Google Scholar] [CrossRef] [PubMed]
- Marinho, Z.; Cardoso, S.; Chaves, R.; Ferreira, R.; Melo, L.V.; Freitas, P.P. Three dimensional magnetic flux concentrators with improved efficiency for magnetoresistive sensors. J. Appl. Phys. 2011, 109, 07E521. [Google Scholar] [CrossRef]
- Pannetier-Lecoeur, M.; Fermon, C.; Polovy, H.; Dyvome, H.; Sergeeva-Chollet, N.; Paul, J. GMR-based sensors for ultra-sensitive magnetometry. IEEE Sens. 2009, 1–3, 1856–1859. [Google Scholar] [CrossRef]
- Pannetier-Lecoeur, M.; Polovy, H.; Sergeeva-Chollet, N.; Cannies, G.; Fermon, C. Magnetocardiography with GMR-based sensors. J. Phys. Conf. Ser. 2011, 303, 012054. [Google Scholar] [CrossRef]
- Barbieri, F.; Trauchessec, V.; Caruso, L.; Trejo-Rosillo, J.; Telenczuk, B.; Paul, E.; Bal, T.; Destexhe, A.; Fermon, C.; Pannetier-Lecoeur, M. Local recording of biological magnetic fields using Giant Magneto Resistance-based micro-probes. Sci. Rep. 2016, 6, 39330. [Google Scholar] [CrossRef] [PubMed]
- Caruso, L.; Wunderle, T.; Lewis, C.M.; Valadeiro, J.; Trauchessec, V.; Rosillo, J.T.; Amaral, J.P.; Ni, J.; Fermon, C.; Cardoso, S.; et al. In Vivo Magnetic Recording of Neuronal Activity. Neuron 2017, 95, 1283–1291. [Google Scholar] [CrossRef] [PubMed]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Biomagnetic Signal | Sensors | Measured Distance | Noise Level & Sensitivity & Recorded Level | |||
|---|---|---|---|---|---|---|---|
| Type | Size | Environment | |||||
| Pannetier-Lecoeur, M. et al. | [27,29] | In-vivo MCG of human body | GMR integrated a superconducting loop | SV sensor 2 μm width; superconducting loop 25 × 25 mm2 | 77 K & MSR | 25~30 mm | 3 fT/Hz0.5 & 3 pT/Hz0.5 & few pT |
| [85] | In-vitro action potential of a mouse skeletal soleus muscle | 3 SV sensors | 1.7 mm long | Room temperature | NR | 3.5 nT/Hz0.5 & 0.5 nT/Hz0.5 & PPA 2.7 nT | |
| Joint research | [86] | In-vivo neuronal activity in the visual cortex of cats | SV sensor array | 30 × 4 μm2 | Inside the neuropil | NR & 7 nT/Hz0.5 at 10 Hz & PPA 2.5 nT | |
| Freitas, P.P. et al. | [21,22] | In-vitro synaptic/action potential current in a mouse brain slice | 15 SV sensors | 30 × 2 μm2 | 1 μm | 2~3 μV & 30 nT/Hz0.5 at 1 kHz & 2.5 μT | |
| [28] | 2 SV sensors | 40 × 2 μm2 | 1 μm | Few nV/Hz0.5 & 54 nT/Hz0.5 at 5 Hz & 33 nT | |||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, H.-M.; Hu, L.; Fu, X. Integrated Giant Magnetoresistance Technology for Approachable Weak Biomagnetic Signal Detections. Sensors 2018, 18, 148. https://doi.org/10.3390/s18010148
Shen H-M, Hu L, Fu X. Integrated Giant Magnetoresistance Technology for Approachable Weak Biomagnetic Signal Detections. Sensors. 2018; 18(1):148. https://doi.org/10.3390/s18010148
Chicago/Turabian StyleShen, Hui-Min, Liang Hu, and Xin Fu. 2018. "Integrated Giant Magnetoresistance Technology for Approachable Weak Biomagnetic Signal Detections" Sensors 18, no. 1: 148. https://doi.org/10.3390/s18010148