3.1. Resonance Measurement
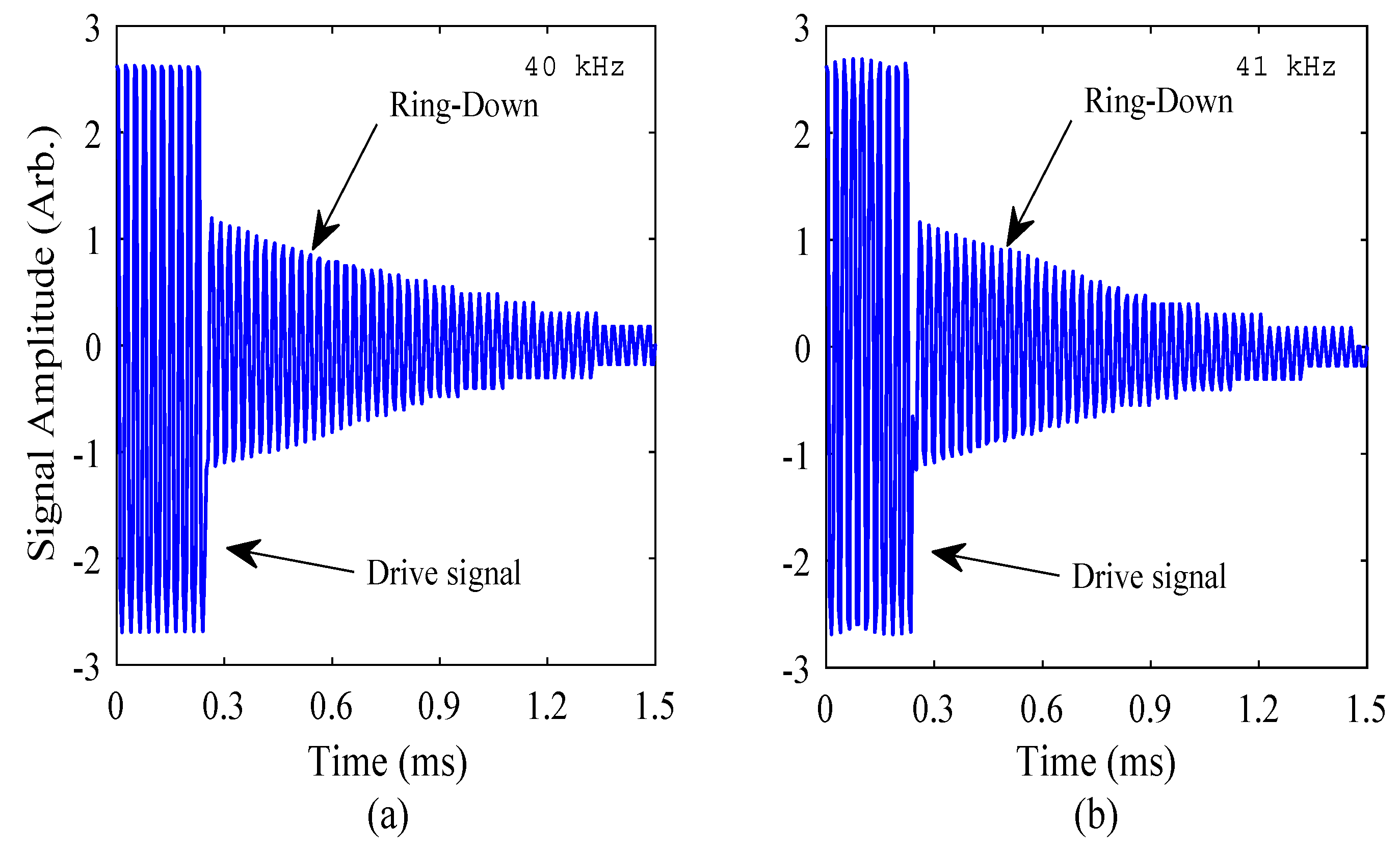
To demonstrate the measurement of the resonance frequency of the FUT using only the function generator and oscilloscope, the Fast Fourier Transform (FFT) of the amplitude-time response was computed, from measurements recorded with drive frequencies of 40 kHz and 41 kHz, both being close to the nominal resonance frequency of the FUT. A burst sine signal with 10 cycles at 10 V
P-P (peak to peak voltage) was applied to the FUT, and the electrical response signal from the function generator measured using the oscilloscope. The characteristic form of these electrical signals are shown in
Figure 4 for both drive frequencies, and clearly indicate the drive and ring-down regions. It should be noted that the y-axis values in
Figure 4 are arbitrary in order for the ring-down region to be clearly displayed.
First, the FFT of each signal spectrum was computed, encompassing both the drive and ring-down regions measured from the oscilloscope data from the function generator. The natural resonance of the FUT for both drive frequencies was then determined, by calculating the FFT of the ring-down response region only. The FFT results are shown in
Figure 5, where the response of the FUT has been split into two parts. The upper curve represents the FFT result of the total electrical response signal, comprising the drive and ring-down regions, and the lower curve shows the FFT result of the response of the resonant ring-down region only. As shown in
Figure 5, a discontinuity in the magnitude of the FFT result can be identified close to the peak amplitude of each upper curve. Energy is shared between the drive signal and the natural resonance of the FUT, hence the appearance of this discontinuity in the amplitude-frequency spectrum calculated from the FFT of the measured time-dependent response.
It has been found that this discontinuity matches the centre frequency of the isolated ring-down response, which is the resonance frequency of the FUT, specifically of its closest fundamental mode of vibration—in this case the (0,0) mode. This is a key observation, as it shows that the resonance frequency of a transducer can be measured rapidly and with precision, using only basic laboratory equipment, and without the need for complex apparatus, for example an electrical impedance analyser.
Through this experiment, and the results shown in
Figure 4, the resonance frequency of the FUT has been shown not to be precisely 40 kHz, but is approximately 40.3 kHz, at the drive voltage of 10 V
P-P. This can be compared with the resonance frequency of this transducer as measured by electrical impedance analysis, which is 40.6 kHz [
19]. There is a slight discrepancy between these measured values, but this can be in part explained by the effect of dynamic nonlinearity on the transducer, demonstrated in a previous study [
19]. The resonance frequency of the FUT has been shown to reduce as the excitation voltage is increased, in what is termed a softening nonlinear effect. The excitation voltage used in electrical impedance analysis is typically in the order of 0.50 V
RMS, significantly lower than the excitation voltage used to generate the results shown in
Figure 4 and
Figure 5. Nevertheless, the measured resonance frequency is within the stated resonance frequency range for this FUT. The identification of the resonance frequency has been made for two different drive frequencies close to resonance, where the location of the discontinuity on the amplitude-frequency spectrum gives an indication of how close the drive frequency is to resonance.
3.2. Dynamic Characterisation
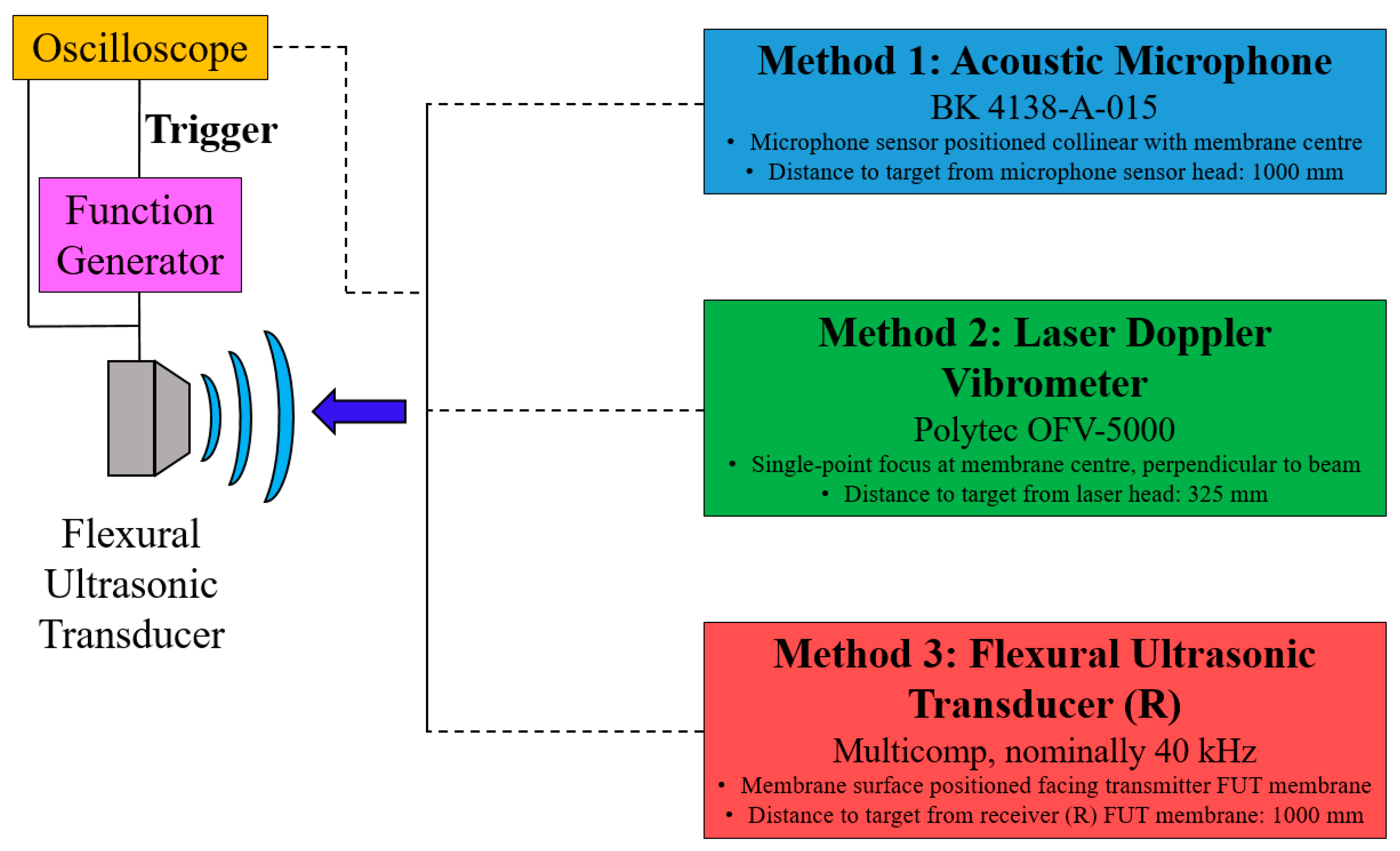
The three measurement techniques—comprising the acoustic microphone, LDV, and the FUT
R, as shown in
Figure 3—are compared in the analysis of the vibration response of the FUT, using the same set of drive conditions for each. The FUT was driven at two frequencies, one at 40 kHz, at its nominal resonance frequency, but slightly lower than the resonance frequency measured in
Section 3.1, and the other at an off-resonance frequency of 44 kHz. A nominal drive excitation voltage of approximately 10 V
P-P was administered in each case, for a burst sine excitation of 110 cycles, with a trigger interval of 20 ms for all measurements. The acoustic microphone was connected to its dedicated amplifier system, and configured to generate 1 Pa per 1 V. A commercial amplifier (Sonemat Two Channel Echo) was incorporated in the measurement of the FUT response using the FUT
R, in order to provide enough gain in the response signal to generate a response spectrum of sufficient resolution. The amplifier was connected directly to the FUT
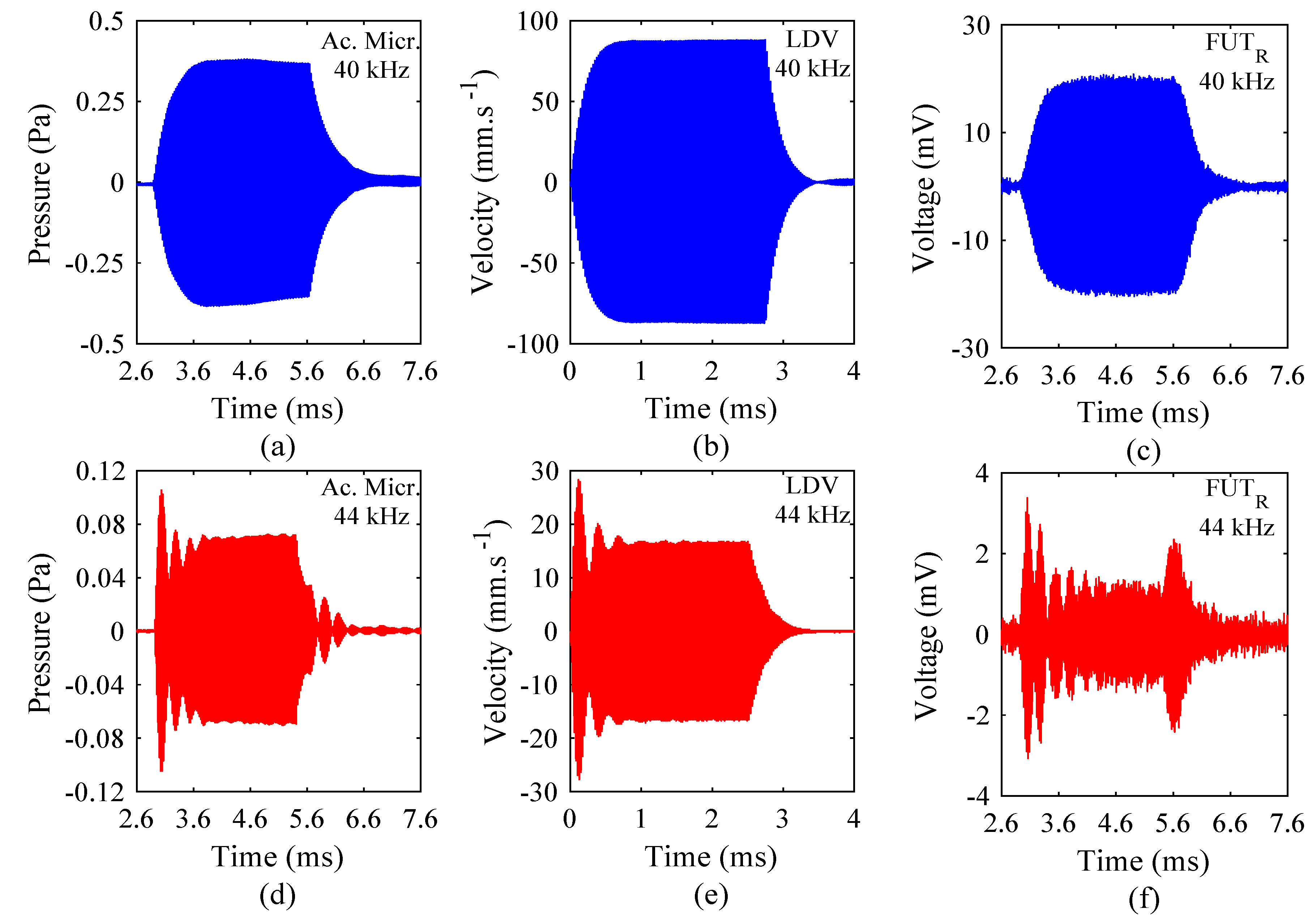
R, where the gain required to generate a signal of sufficient voltage amplitude is approximately 100. The results of these experiments are shown in
Figure 6. The acoustic microphone and FUT
R measurement results include a time delay, which represents the time taken for the sound to travel through the air medium and be collected by the respective sensor. The reason that there is no time delay in the response measurements from the LDV experiments is that this is an optical measurement technique which provides instantaneous vibration response measurement.
The results presented in
Figure 6 show the measured responses of the FUT from three different methods of dynamic characterisation. Since the measurement techniques utilise different sensor configurations, the vibration responses are recorded in terms of different physical parameters. The acoustic microphone measurements are collected where voltage and pressure are in direct proportion. For clarity, the pressure sign is provided to show the oscillating nature of the measured ultrasound signal. The laser Doppler vibrometer measures velocity through the Doppler effect, where again the velocity sign is shown to indicate the oscillatory motion, and the FUT
R measures sound energy via a conversion to electrical energy, where the receive voltage measured by the FUT
R requires amplification, since the sensitivity of the device is relatively low compared to that of either the acoustic microphone or the LDV system. In
Figure 6, there is no significant over-shoot in the amplitude-time responses of the FUT measured at 40 kHz from each method, confirming that the FUT is being driven close to resonance. Clear over-shoot of the vibration amplitude is exhibited for each measurement technique for a drive frequency of 44 kHz, also displayed in
Figure 6. However, the results shown in
Figure 5 demonstrated that 40 kHz is a marginally off-resonance drive frequency, and so there will exist a small over-shoot in the amplitude-time spectrum. This is most prominently identified in the results from the acoustic microphone measurements, as exhibited in
Figure 6a, where the response is not precisely at steady-state. The reason that this behavior is more conspicuous in this data set is due to the scaling of the ordinate axes.
Prior to the application of the mathematical model in the analysis of the results shown in
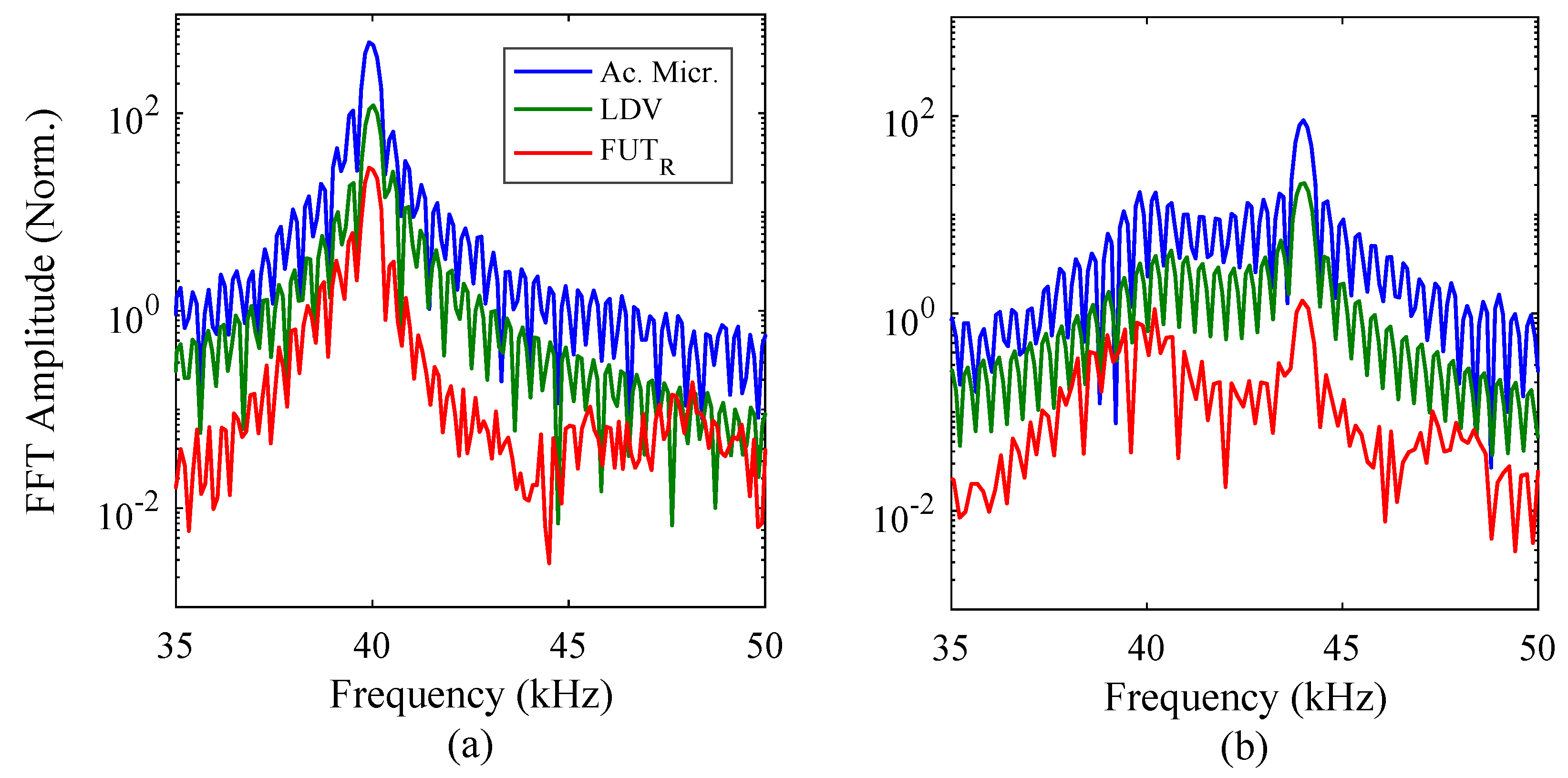
Figure 6, the sensor results can be processed to provide a comparison of the measured resonance between each technique. FFTs were computed for all measurements from the three techniques, using a rectangular window and normalised to the mean square amplitude in each case. The FFT results are shown in
Figure 7.
For a drive frequency of 40 kHz, as shown in
Figure 7a, the measured frequency response from the three techniques correlate closely. The amplitudes of each data set have not been adjusted, to give an indication of the relative magnitudes of the FFTs in each case. The peaks in the amplitude-frequency spectrum for each measurement technique provide information regarding the drive signal frequency and the resonance frequency of the FUT. In the results shown in
Figure 7a, it has been shown that the drive signal frequency and the resonance frequency of the FUT are close, and each measurement result is consistent with those of the other methods. The analysis of the 44 kHz drive signal shows a similar level of correlation. The energy in the amplitude-frequency spectrum is shared between the natural resonance around 40 kHz, and the drive signal frequency at 44 kHz.
Despite this high level of correlation, there is not a precise overlap in the FFT computation for each case. Minor differences in the FFT spectra are important for the analysis of the initial region response of FUTs, since the amplitude rises from zero and is constantly changing until steady-state is reached. This means that the derived mathematical function should be able to predict the behaviour for a sinusoidal case. However, if the vibration motion is not instantaneously sinusoidal, then there may be a discrepancy with the mechanical analog model. This could have implications for how FUT-based systems are operated, particularly for a high number of FUT elements. Each measurement technique relies on a different sensor configuration. The LDV system employs an optical method utilising the Doppler effect, not a capacitive element such as that found in the acoustic microphone. Furthermore, the vibration response of the FUT
R is also affected by the flexural cap motion, the membrane of which is not assumed to instantaneously vibrate sinusoidally in response to a sinusoidal input signal. This is due to the mass inertia of the system, which does not affect a measurement process such as LDV. For these reasons, and to gain some insight into how the initial region response is generated and measured, the amplitude-time responses from each measurement technique were superimposed, with the results set to be in-phase towards the steady-state region. The purpose of this was to be able to identify any minor differences in vibration response, particularly at the time immediately after the drive signal is applied. The results are shown in
Figure 8 for a 40 kHz and 110 cycle drive signal.
There is no substantial difference in terms of the measured signal shape between the responses collected by the acoustic microphone and LDV. A similar outcome has been found for the comparison between LDV and the FUTR, and through association, it has been demonstrated that the measured signal shape can generally be considered as consistent for the three measurement techniques. This is applicable to both the initial and steady-state region responses. The amplitudes of the measured signals have been normalised, but amplitude depends on the sensitivity of the measurement device, and so should not be used to correlate or compare measurement techniques. The close correlation of signals between that of the acoustic microphone and the FUTR is not unexpected, due to the similarity in the way sound vibrations are recorded using these systems, with a flexing or bending membrane, as opposed to an optical method which the LDV system employs. However, the LDV measurements are near-field, whereas the acoustic microphone and FUTR results are obtained in the far-field. More specifically, the acoustic microphone is a far-field wide-band device, and the FUTR is a far-field narrow-band device, and therefore it is particularly interesting that the three measurement techniques appear to produce amplitude-time spectra of close correlation. The results show the suitability of all three techniques for high-quality vibration response measurement and characterisation, and that the measured response spectra are all similar, irrespective of the adopted measurement technique.
3.3. Mechanical Analog Model of the Initial Region
The mathematics of the steady-state and resonant ring-down regions of the transducer response are not reported here, being commonly accepted relationships [
3,
5]. However, a mathematical treatment of the initial response region has not been reported in detail. In general, a FUT can be considered as a lightly-damped resonator, with a mass M, damping factor C, and stiffness K, with a time-dependent forcing function which is assumed to be sinusoidal, that is shown by Fsin (
ωt), with an angular drive frequency of ω. It is assumed that the FUT oscillates with a specific time-dependent vibration amplitude, from zero at rest, until a discrete time after which the steady-state response can be observed. Upon cessation of the drive signal, the FUT response decays at resonance. The steady-state and decay regions can be described by familiar mathematical relationships, and the initial region response prior to steady-state can be considered as an impulse signal which is used to drive the FUT to resonance. The switch from a rest condition to that of steady-state vibration is postulated to closely represent the effect of a unit step function. Since the response of the FUT switches from rest to the sinusoidal forcing function condition, the approach which has been used to develop the mathematical analog is through the convolution of the Heaviside step function and a sinusoidal forcing function of the form
, where
is the amplitude of vibration. The basic equation for this convolved relationship is given by (1).
Here,
is the switch-off time of the forcing function, with
, the Heaviside function. The initial conditions are that both
and
are zero at
. The solution to (1) for
is shown in (2), with the first and second derivatives shown in (3) and (4).
The first and second terms in (2) are homogeneous which represent the natural resonance of the FUT, and the third and fourth terms together describe the forced excitation, or drive signal. The general solution of (1) can be formed, since H = 1 for 0 <
t ≤
t0, and is shown in (5).
Comparing (2) to (4) with (5), and collecting the exponential terms, gives (6). This equation can be solved to provide expressions for the
and
terms, shown in (7). Collecting the
and
terms gives expressions for A and B, shown in (8) to (13).
In order to calculate the amplitudes of the natural resonances, , it is necessary to consider in a little more detail the terms . Applying the initial conditions that and are zero at to (2) and (3) gives (14) to (19).
Using (7), the
and
terms can be expressed by (20) and (21). Subtracting these terms gives (22), enabling
and
to be determined, shown by (23) and (24).
The experimental results in
Figure 6, and the prior investigations into the electro-mechanical behaviour of FUTs [
14], indicate that the FUT resonates in a lightly damped, or underdamped, state. There are three distinct cases for the system damping, shown in (25) to (27).
For the overdamped case,
:
, where
For the critically damped case,
:
For the underdamped case,
:
, where
;
;
The FUT is assumed to be operating in an underdamped state, being a resonant transducer. The underdamped case of oscillation, analogous to that produced in the response of the FUT, results in a complex term in the response equation. The solution to the equation of motion for the FUT can then be written as shown in (28) to (30), using standard trigonometric identities.
With respect to the drive signal, the
and
parameters are related to the forced excitation amplitude once the FUT drive signal is switched on. The amplitude response to the drive signal in this initial region of the FUT response is denoted by
. The solution to (1), and the above results, can be used to derive the amplitude
, which is represented by
, and phase
parameters for the FUT response under forced excitation approaching steady-state, shown in (31), which can be used in the computation of the response as a function of time. Using (10) and (13), an expression for
can be derived, which is shown in (32) to (35).
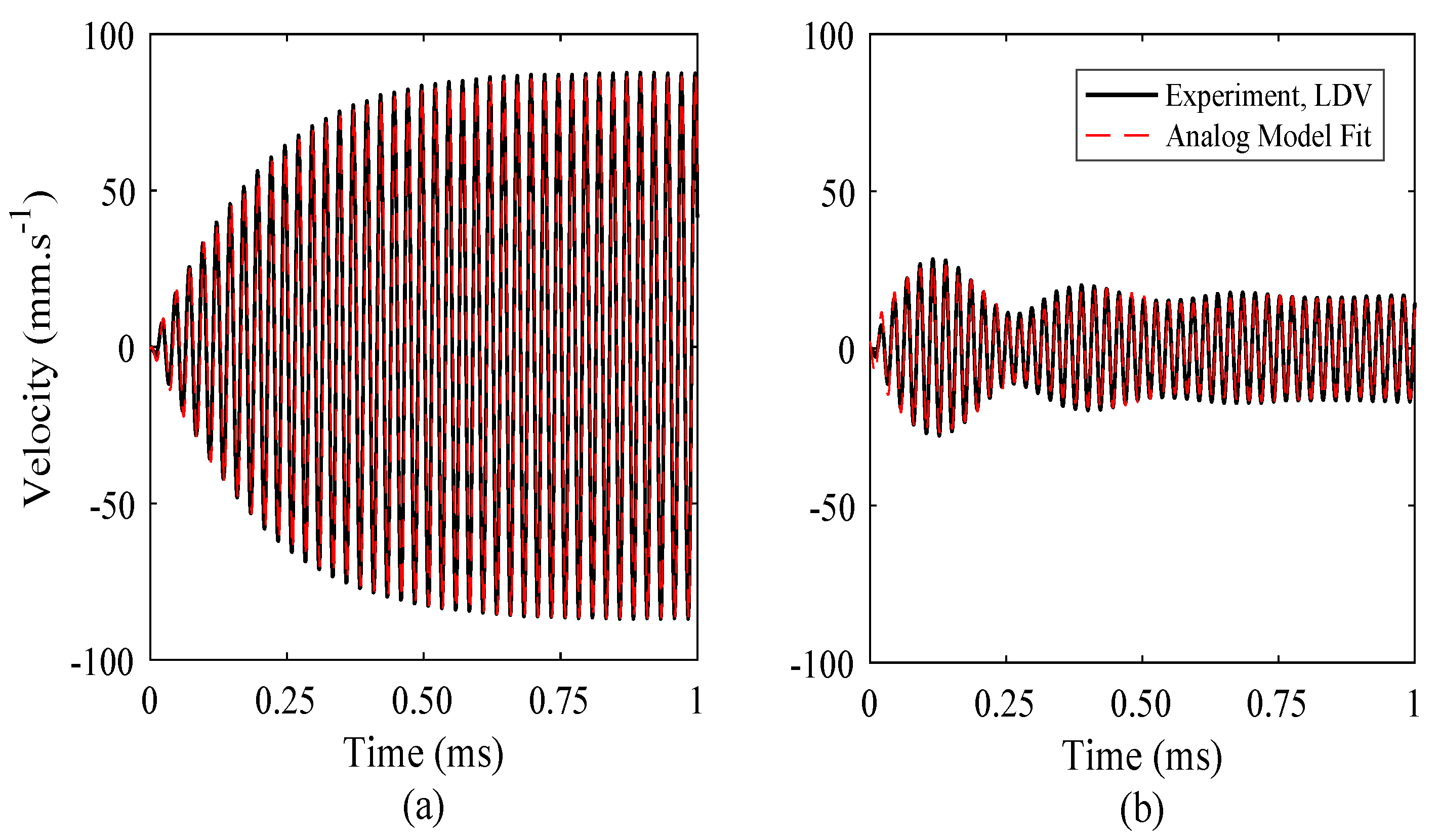
The derived parameters can be used to generate an amplitude-time spectrum which represents the build-up towards steady-state, for a specific drive frequency. Equation (31) can be adapted to generate the real part of the response only, which represents the vibration response of the FUT, as shown by (36). The responses for drive signals of 40 kHz and 44 kHz are shown in
Figure 9, which are compared to the FUT response measured using LDV, from
Figure 6.
The results show a close correlation between the numerical and experimental data, demonstrating the reliability of the mechanical analog model to accurately predict the vibration response of the FUT, and for different drive frequencies. It also provides insight into the mechanisms of the dynamic response of a FUT, which is invaluable in the future design and optimisation of transducers based on this configuration. In general, it is anticipated that this model will be used in future to simulate the performance of a FUT, and will aid in the design process in order to tailor FUT designs for particular industrial or medical applications that utilise different drive frequencies to improve their performance.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








