Accurate Weed Mapping and Prescription Map Generation Based on Fully Convolutional Networks Using UAV Imagery


 and
and
Abstract
:1. Introduction
2. Data Collection
2.1. Study Field and Data Collection
2.2. Dataset Preparation
3. Methodology
3.1. Workflow
3.2. Semantic Labeling
3.3. Prescription Map Generation
4. Results and Discussions
4.1. Workflow
4.2. Semantic Labeling
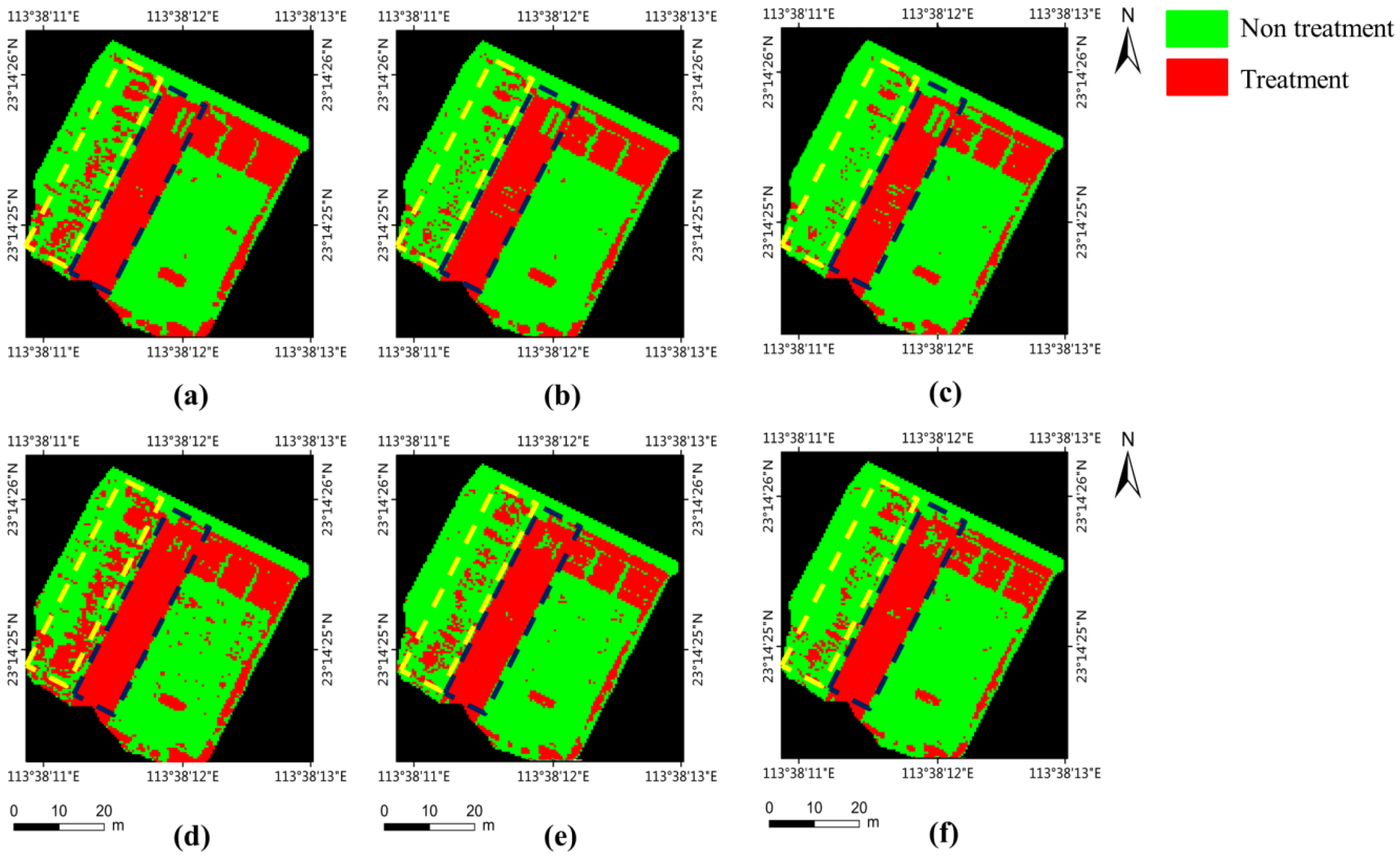
4.3. Prescription Map Generation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dass, A.; Shekhawat, K.; Choudhary, A.K.; Sepat, S.; Rathore, S.S.; Mahajan, G.; Chauhan, B.S. Weed management in rice using crop competition-a review. Crop Prot. 2017, 95, 45–52. [Google Scholar] [CrossRef]
- Qiu, G.; Li, J.; Li, Y.; Shen, S.; Ming, L.; Lu, Y. Aplication Technology of Two Times of Closed Weed Control in Mechanical Transplanted Rice Field. J. Weed Sci. 2016, 4, 33–38. [Google Scholar]
- Gao, B.; Liu, D.; Hui, K.; Wu, X. Weed control techniques in direct seeding rice field. Mod. Agric. Sci. Technol. 2007, 17, 114–117. [Google Scholar]
- López-Granados, F.; Torres-Sánchez, J.; Serrano-Pérez, A.; de Castro, A.I.; Mesas-Carrascosa, F.J.; Peña, J. Early season weed mapping in sunflower using UAV technology: Variability of herbicide treatment maps against weed thresholds. Precis. Agric. 2016, 17, 183–199. [Google Scholar] [CrossRef]
- Nordmeyer, H. Spatial and temporal dynamics of Apera spica-venti seedling populations. Crop Prot. 2009, 28, 831–837. [Google Scholar] [CrossRef]
- Peña, J.; Torressánchez, J.; Serranopérez, A.; Lópezgranados, F. Weed mapping in early-season maize fields using object-based analysis of unmanned aerial vehicle (UAV) images. PLoS One 2013, 8, e77151. [Google Scholar] [CrossRef] [PubMed]
- Lan, Y.; Thomson, S.J.; Huang, Y.; Hoffmann, W.C.; Zhang, H. Current status and future directions of precision aerial application for site-specific crop management in the USA. Comput. Electron. Agric. 2010, 74, 34–38. [Google Scholar] [CrossRef]
- De Castro, A.; Torres-Sánchez, J.; Peña, J.; Jiménez-Brenes, F.; Csillik, O.; López-Granados, F. An Automatic Random Forest-OBIA Algorithm for Early Weed Mapping between and within Crop Rows Using UAV Imagery. Remote Sens. 2018, 10, 285. [Google Scholar] [CrossRef]
- Lan, Y.; Shengde, C.; Fritz, B.K. Current status and future trends of precision agricultural aviation technologies. Int. J. Agric. Biol. Eng. 2017, 10, 1–17. [Google Scholar]
- Castaldi, F.; Pelosi, F.; Pascucci, S.; Casa, R. Assessing the potential of images from unmanned aerial vehicles (UAV) to support herbicide patch spraying in maize. Precis. Agric. 2017, 18, 76–94. [Google Scholar] [CrossRef]
- Ahonen, T.; Hadid, A.; Pietikäinen, M. Face Recognition with Local Binary Patterns. In Proceedings of the European Conference on Computer Vision, Prague, The Czech Republic, 11–14 May 2004; Springer: Berlin/Heidelberg, Germany, 2004; pp. 469–481. [Google Scholar]
- DEFRIES, R.S.; TOWNSHEND, J.R.G. NDVI-derived land cover classifications at a global scale. Int. J. Remote Sens. 1994, 15, 3567–3586. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Stark, R.; Rundquist, D. Novel algorithms for remote estimation of vegetation fraction. Remote Sens. Environ. 2002, 80, 76–87. [Google Scholar] [CrossRef] [Green Version]
- Hung, C.; Xu, Z.; Sukkarieh, S. Feature Learning Based Approach for Weed Classification Using High Resolution Aerial Images from a Digital Camera Mounted on a UAV. Remote Sens. 2014, 6, 12037–12054. [Google Scholar] [CrossRef] [Green Version]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Shelhamer, E.; Long, J.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 4, 640–651. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 834–848. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sherrah, J. Fully Convolutional Networks for Dense Semantic Labelling of High-Resolution Aerial Imagery. arXiv, 2016; arXiv:1606.02585. [Google Scholar]
- Maggiori, E.; Tarabalka, Y.; Charpiat, G.; Alliez, P. High-Resolution Semantic Labeling with Convolutional Neural Networks. arXiv, 2016; arXiv:1611.01962. [Google Scholar]
- Maggiori, E.; Tarabalka, Y.; Charpiat, G.; Alliez, P. Fully Convolutional Neural Networks For Remote Sensing Image Classification. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 5071–5074. [Google Scholar]
- Huang, H.; Deng, J.; Lan, Y.; Yang, A.; Deng, X.; Zhang, L. A fully convolutional network for weed mapping of unmanned aerial vehicle (UAV) imagery. PLoS One 2018, 13, e196302. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Lan, Y.; Deng, J.; Yang, A.; Deng, X.; Zhang, L.; Wen, S. A Semantic Labeling Approach for Accurate Weed Mapping of High Resolution UAV Imagery. Sensors 2018, 18, 2113. [Google Scholar] [CrossRef] [PubMed]
- Schwartz, A.M.; Paskewitz, S.M.; Orth, A.P.; Tesch, M.J.; Toong, Y.C.; Goodman, W.G. The lethal effects of Cyperus iria on Aedes aegypti. J. Am. Mosq. Control Assoc. 1998, 14, 78–82. [Google Scholar] [PubMed]
- Yu, J.; Gao, H.; Pan, L.; Yao, Z.; Dong, L. Mechanism of resistance to cyhalofop-butyl in Chinese sprangletop ( Leptochloa chinensis (L.) Nees). Pestic. Biochem. Physiol. 2017, 143, 306–311. [Google Scholar] [CrossRef] [PubMed]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef]
- Zhang, W.; Huang, H.; Schmitz, M.; Sun, X.; Wang, H.; Mayer, H. Effective Fusion of Multi-Modal Remote Sensing Data in a Fully Convolutional Network for Semantic Labeling. Remote Sens. 2018, 10, 52. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. arXiv, 2014; arXiv:1409.1556. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.; Winn, J.; Zisserman, A. PASCAL Visual Object Classes Recognition Challenge 2011 (VOC2011)–Training & Test Data. Available online: http://www.pascal-network.org/?q=node/598 (accessed on 5 November 2017).
- Stathakis, D. How many hidden layers and nodes? Int. J. Remote Sens. 2009, 30, 2133–2147. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Kr Henbühl, P.; Koltun, V. Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials. arXiv, 2012; arXiv:1210.5644. [Google Scholar]
- Gonzalez-de-Santos, P.; Ribeiro, A.; Fernandez-Quintanilla, C.; Lopez-Granados, F.; Brandstoetter, M.; Tomic, S.; Pedrazzi, S.; Peruzzi, A.; Pajares, G.; Kaplanis, G.; et al. Fleets of robots for environmentally-safe pest control in agriculture. Precis. Agric. 2017, 18, 574–614. [Google Scholar] [CrossRef]
- Gibson, K. Detection of Weed Species in Soybean Using Multispectral Digital Images. Weed Technol. 2004, 18, 742–749. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Flight Date | Number of Patches | Description |
|---|---|---|---|
| D02-1 | 2nd October 2017 | 182 | Divided from the ortho-mosaic imagery |
| D10-1 | 10th October 2017 | 182 | Divided from the ortho-mosaic imagery |
| D02-2 | 2nd October 2017 | 648 | Divided from the collected imagery |
| D10-2 | 10th October 2017 | 600 | Divided from the collected imagery |
| Workflow | Overall Accuracy | Mean IU | Speed |
|---|---|---|---|
| Mosaicking–labeling | 0.9096 | 0.8303 | 24.8 min |
| Labeling–mosaicking | 0.9074 | 0.8264 | 32.5 min |
| Method | Overall Accuracy | Mean IU | Speed-1 | Speed-2 |
|---|---|---|---|---|
| FCN-8s | 0.9096 | 0.8303 | 0.413 s | 24.8 min |
| Deeplab | 0.9191 | 0.8460 | 5.279 s | 39.6 min |
| FCN-4s | 0.9196 | 0.8473 | 0.356 s | 24.7 min |
| Method | GT/Predicted Category | Others | Rice | Weeds |
|---|---|---|---|---|
| FCN-8s | others | 0.939 | 0.042 | 0.018 |
| rice | 0.037 | 0.894 | 0.069 | |
| weeds | 0.078 | 0.027 | 0.895 | |
| Deeplab | others | 0.922 | 0.044 | 0.034 |
| rice | 0.023 | 0.924 | 0.052 | |
| weeds | 0.056 | 0.036 | 0.907 | |
| FCN-4s | others | 0.938 | 0.030 | 0.031 |
| rice | 0.037 | 0.913 | 0.049 | |
| weeds | 0.055 | 0.039 | 0.905 |
| Threshold | Treatment Area | Herbicide Saving |
|---|---|---|
| 0.00 | 41.7% | 58.3% |
| 0.05 | 35.9% | 64.1% |
| 0.10 | 33.6% | 66.4% |
| 0.15 | 31.9% | 68.1% |
| 0.20 | 30.4% | 69.6% |
| 0.25 | 29.2% | 70.8% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Deng, J.; Lan, Y.; Yang, A.; Deng, X.; Wen, S.; Zhang, H.; Zhang, Y. Accurate Weed Mapping and Prescription Map Generation Based on Fully Convolutional Networks Using UAV Imagery. Sensors 2018, 18, 3299. https://doi.org/10.3390/s18103299
Huang H, Deng J, Lan Y, Yang A, Deng X, Wen S, Zhang H, Zhang Y. Accurate Weed Mapping and Prescription Map Generation Based on Fully Convolutional Networks Using UAV Imagery. Sensors. 2018; 18(10):3299. https://doi.org/10.3390/s18103299
Chicago/Turabian StyleHuang, Huasheng, Jizhong Deng, Yubin Lan, Aqing Yang, Xiaoling Deng, Sheng Wen, Huihui Zhang, and Yali Zhang. 2018. "Accurate Weed Mapping and Prescription Map Generation Based on Fully Convolutional Networks Using UAV Imagery" Sensors 18, no. 10: 3299. https://doi.org/10.3390/s18103299