4.1. Simulation and Analysis of Cable Sheath Currents
Simulation has been carried out for a 110 kV HV cable circuit using PSCAD. All cable segments have a conductor cross-section of 800 mm
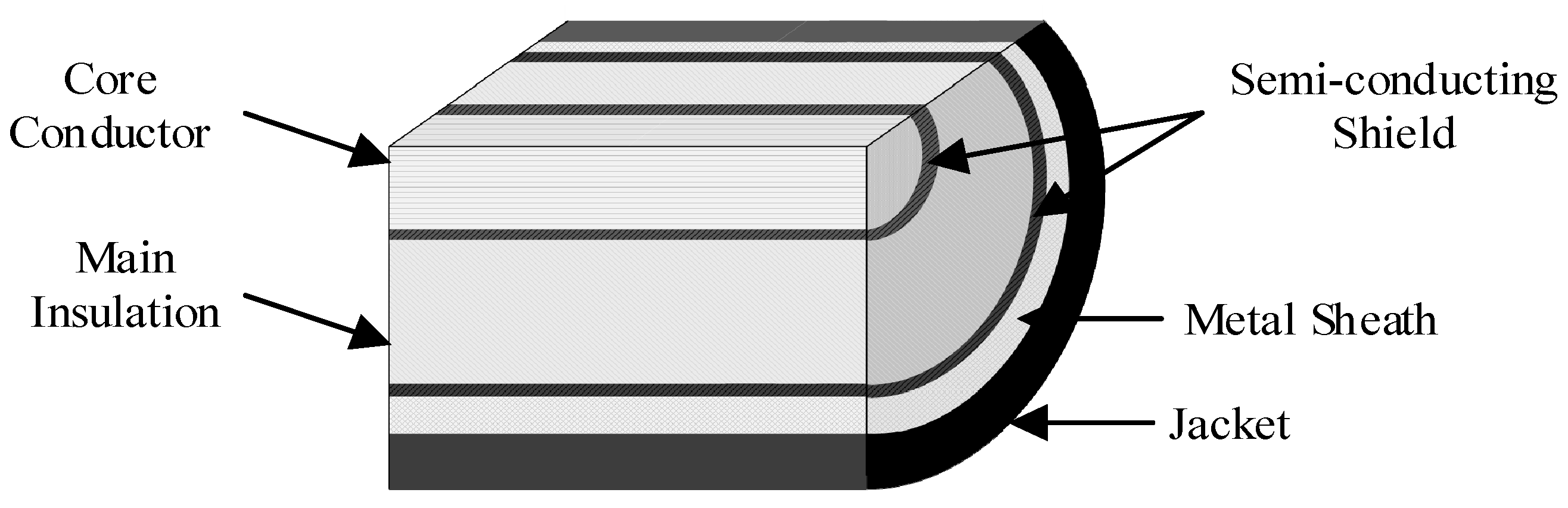
2. The parameters of the cross-sectional structure are shown in
Figure 2 and
Table 1.
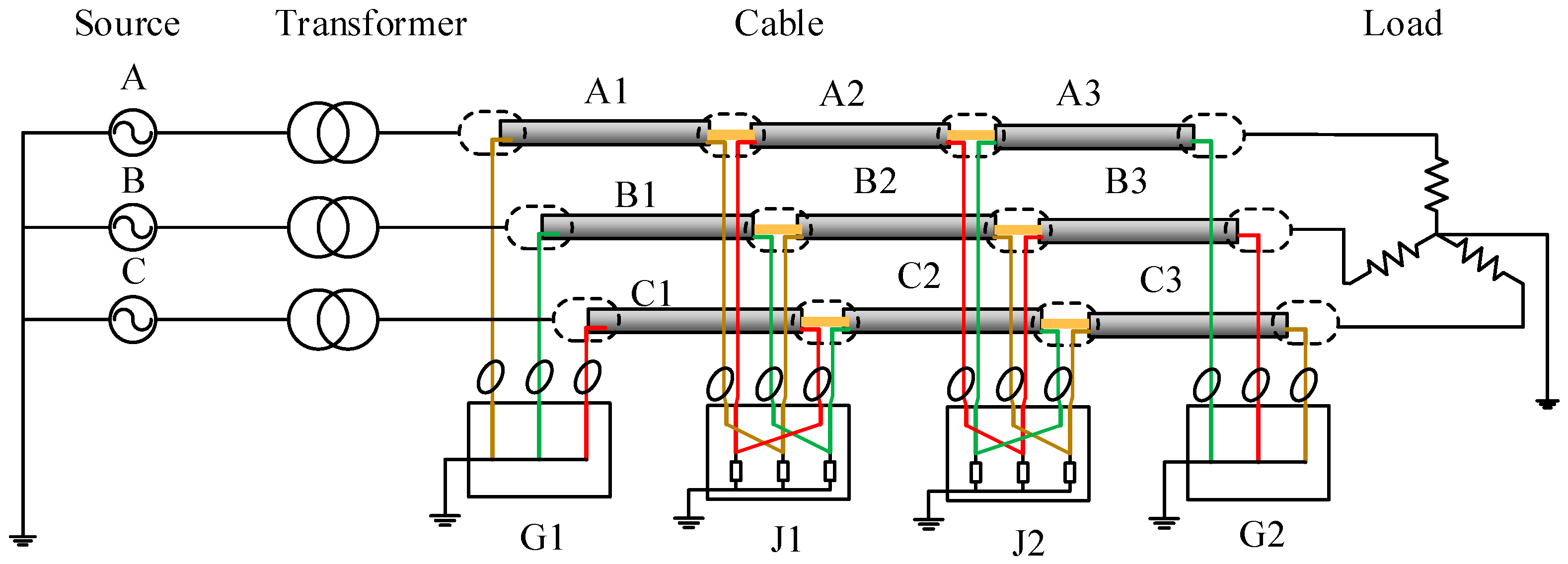
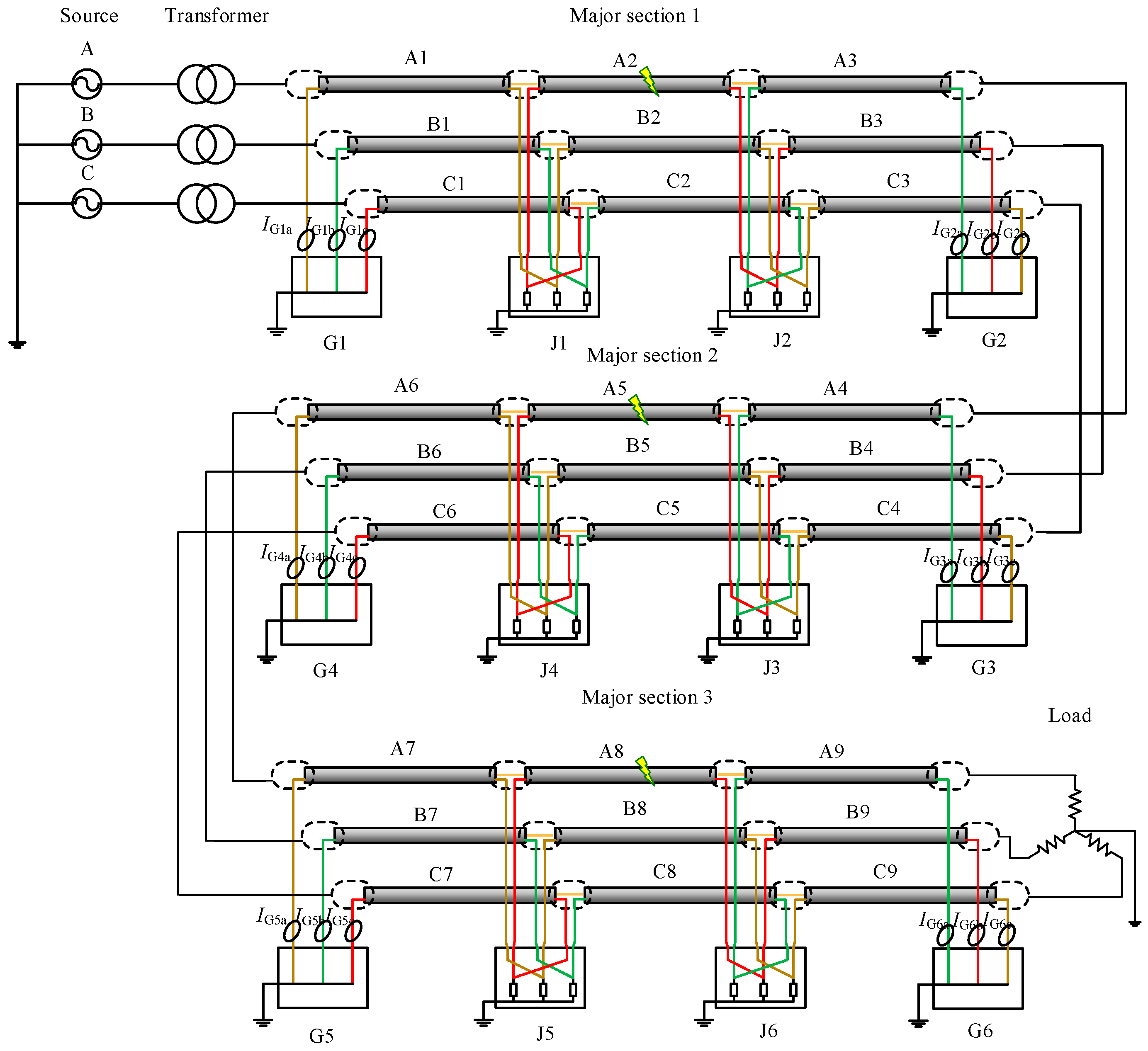
The power network in simulation, as shown in
Figure 4, is a simple power system containing a power source, a transformer, and a major section of the cross-bonded cables and loads, where three phase cable system with three minor sections (nine cable segments for the three phases) are installed in a flat horizontal formation. Each minor section is 500 m, hence the total cable circuit length is 1500 m. The grounding resistance in each of the sheath loops is 0.1 Ω.
Assuming the three-phase voltages of the 110 kV power source are Ua = 63.51∠0° kV, Ub = 63.51∠−120° kV, Uc = 63.51∠120°, and that the balanced load is 40 MW. Then, the three phase currents from simulation results are: Ia = 209.97∠−1.3° A, Ib = 210.00∠−121.3° A, Ic = 210.05∠118.7° A, respectively.
Considering the axial distribution and radial structure, the cable circuit is expressed as a distributed parameter model. Therefore the voltage and current in any location of the cable model is not exactly the same. The magnitude of the sheath current under healthy conditions in each of the sheath loops is only a few amperes.
Assuming a single-phase short circuit fault occurs in cable segment A1. The fault duration is 0.1 s. The fault position is 300 m from the left cable terminal of
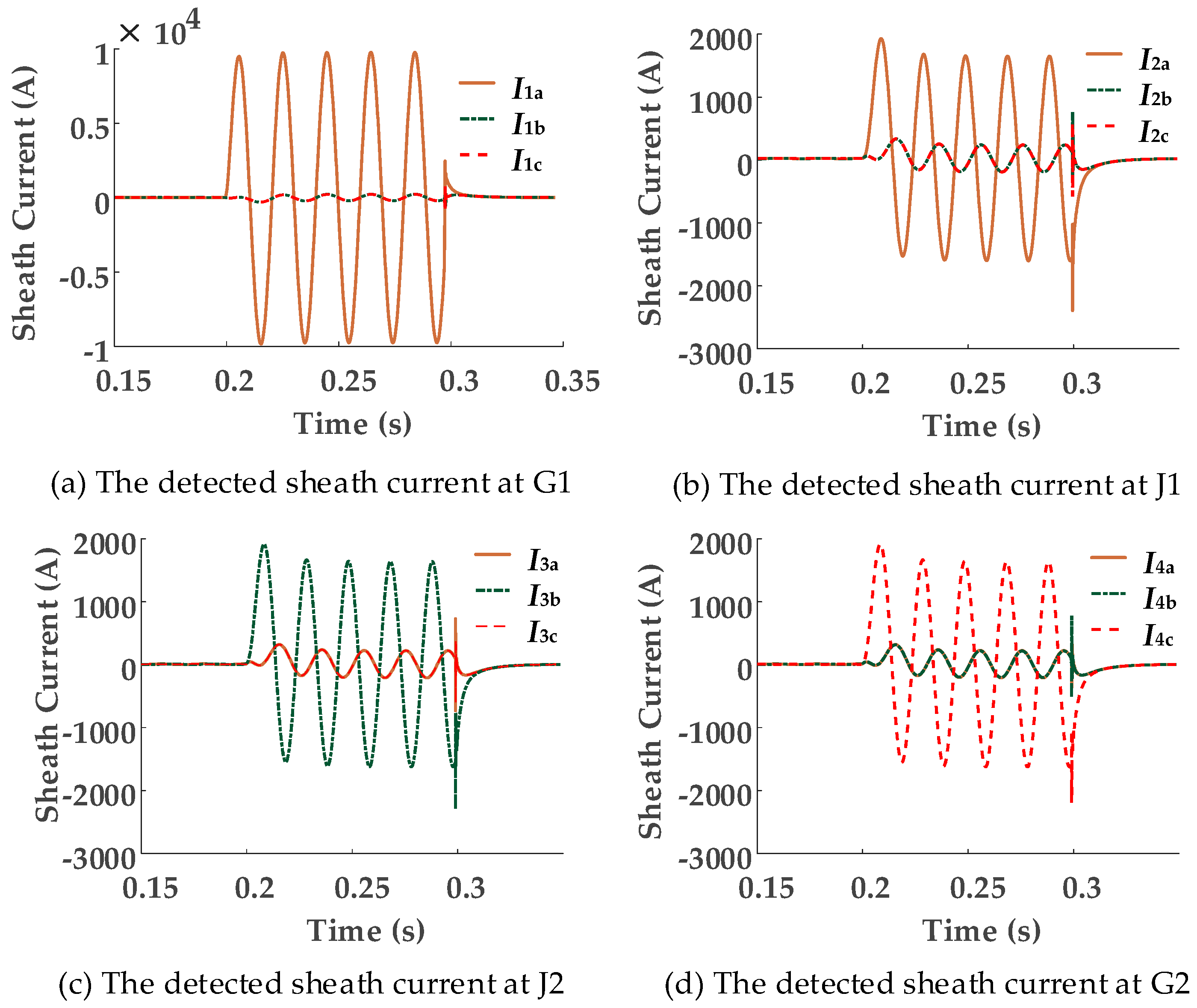
Figure 1. The simulation results of each sheath current at each detection point are presented in
Figure 5.
Figure 5 shows that, when a breakdown happens in cable segment A1 between the conductor and the sheath, the resultant fault current in section 1, phase A, splits in two directions in the sheath when flowing to ground. Part of the fault current flows from the breakdown point to the grounding point in G1, whilst, the other part of the fault current flows from the breakdown point to the grounding point in G2, causing a high level of sheath currents
I1a,
I2a,
I3b, and
I4c to be detected at G1, J1, J2, and G2 respectively. Meanwhile, the sheath currents in phases B and C also increase, owing to mutual coupling (This explains why currents in the two healthy phases are almost identical in
Figure 5). Because of the cross-bonded connection, the fault currents detected at other detection points flow along the transposed sheaths before flowing to ground, as shown in
Figure 5b–d.
In this section of the paper, only the fundamental signal under 50 Hz when establishing the criteria for fault segment location is analyzed. The magnitudes of the 50 Hz currents at each of current sensors within different fault segments are shown in
Table 2.
Table 2 indicates that the magnitudes of fundamental current at each of the sensor positions vary with the change in segment where a fault occurs. Due to the cross-bonded connection, it is not always possible to determine the faulted segments based on the sheath current magnitudes. When a fault occurs in A1, B1, C1, A3, B3, or C3, it is relatively easy to recognize the fault segment. However, when a fault occurs in segment A2, B2, or C2, especially when the fault point is near the middle of the cable segments, it is impossible to differentiate the fault segment based only on an analysis of the sheath current magnitudes.
4.2. Criteria for Fault Segment Location
Fault currents flow in both directions along the metal sheath to ground, for the cable segment where a fault occurs. Thus, the phase difference between the currents flowing towards the two ends of the cable segment is nearly 180°. Generally, the length of each cable segment is no more than 500 m. In practice, each of the three cable segments may have a different length. However, the phase shift caused due to unequal section lengths between the detected currents at the two ends is not noticeable. Let
B(I) be the phase angle of the fundamental frequency current I.
P(segment) is the phase difference between the sheath currents at either side of a cable segment (segment ∈ {“A1” “B1” “C1” “A2” “B2” “C2” “A3” “B3” “C3”}). Consequently, the calculation of the phase difference is presented in Equation (6). The results are shown in
Table 3.
Table 3 shows that when a single-phase short-circuit occurs, the phase difference of the fault cable segment is significantly higher than those non-fault cable segments, as the phase differences of the non-fault segments are very small. In fact, they are less than ±2°, as shown in the performed simulation. Consequently, the fault segment can be identified, based on the phase difference of the sheath currents at either end of the segment. It is to be noted that the results given in
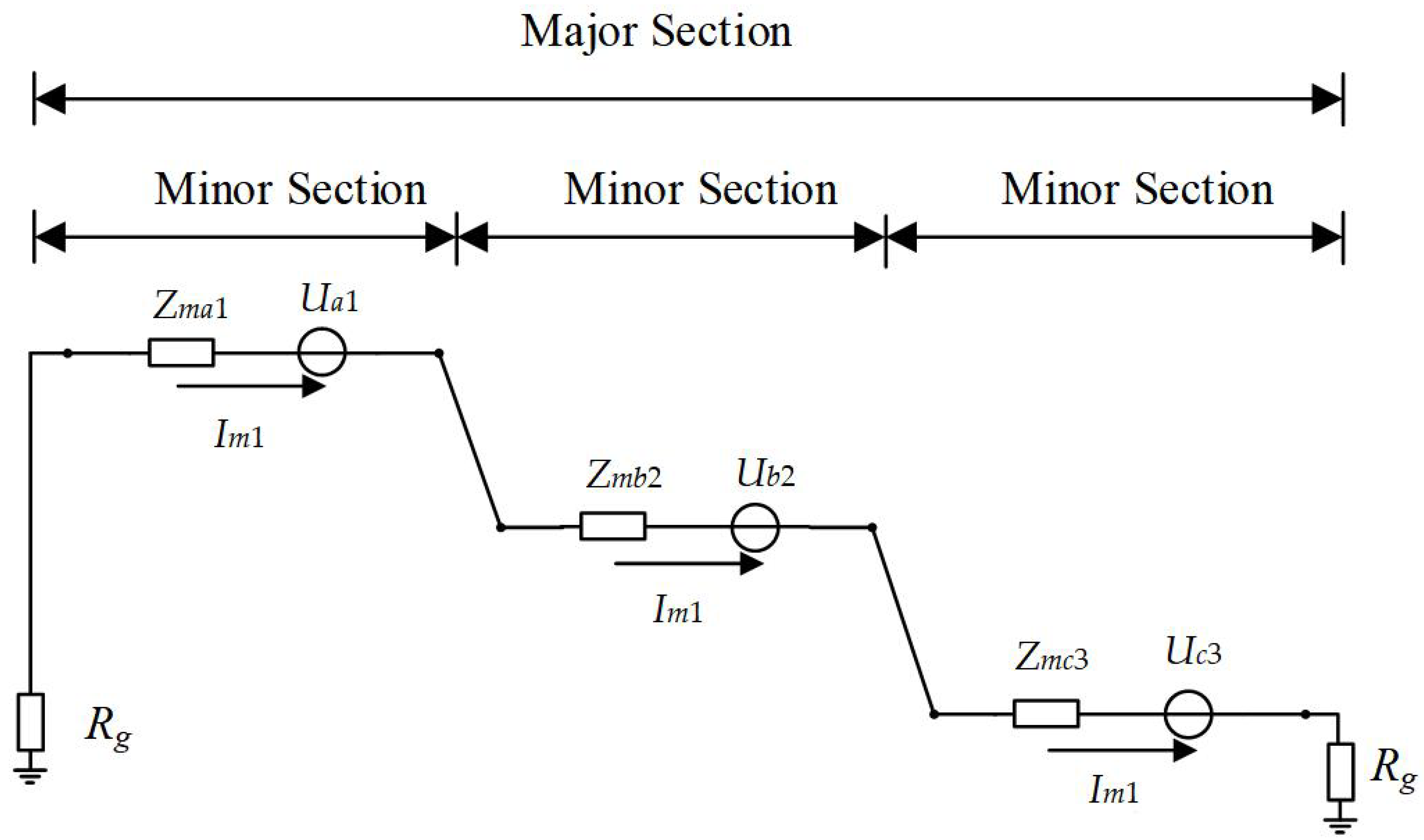
Table 3 are not exactly 0 or 180°. To explain the determining factors, an equivalent circuit diagram is shown in
Figure 6.
In
Figure 6,
Im1 is denoted as the sheath current in a closed sheath circuit.
Ua1,
Ub2,
Uc3 are the equivalent voltage sources due to electromagnetic induction in the circuit.
Zma1,
Zmb2,
Zmc3 are equivalent impedances of segments A1, B2, and C3 respectively.
Rg is grounding resistance.
Zma1,
Zmb2,
Zmc3 include both the inductive reactance and the sheath resistance of each of the cable segments in the loop, while
Rg stands for the grounding resistance. The value of
Rg has an influence on both the magnitude and the phase angle of the sheath current Im1. When no fault occurs in the circuit,
Im1 can be represented, as given in Equation (7).
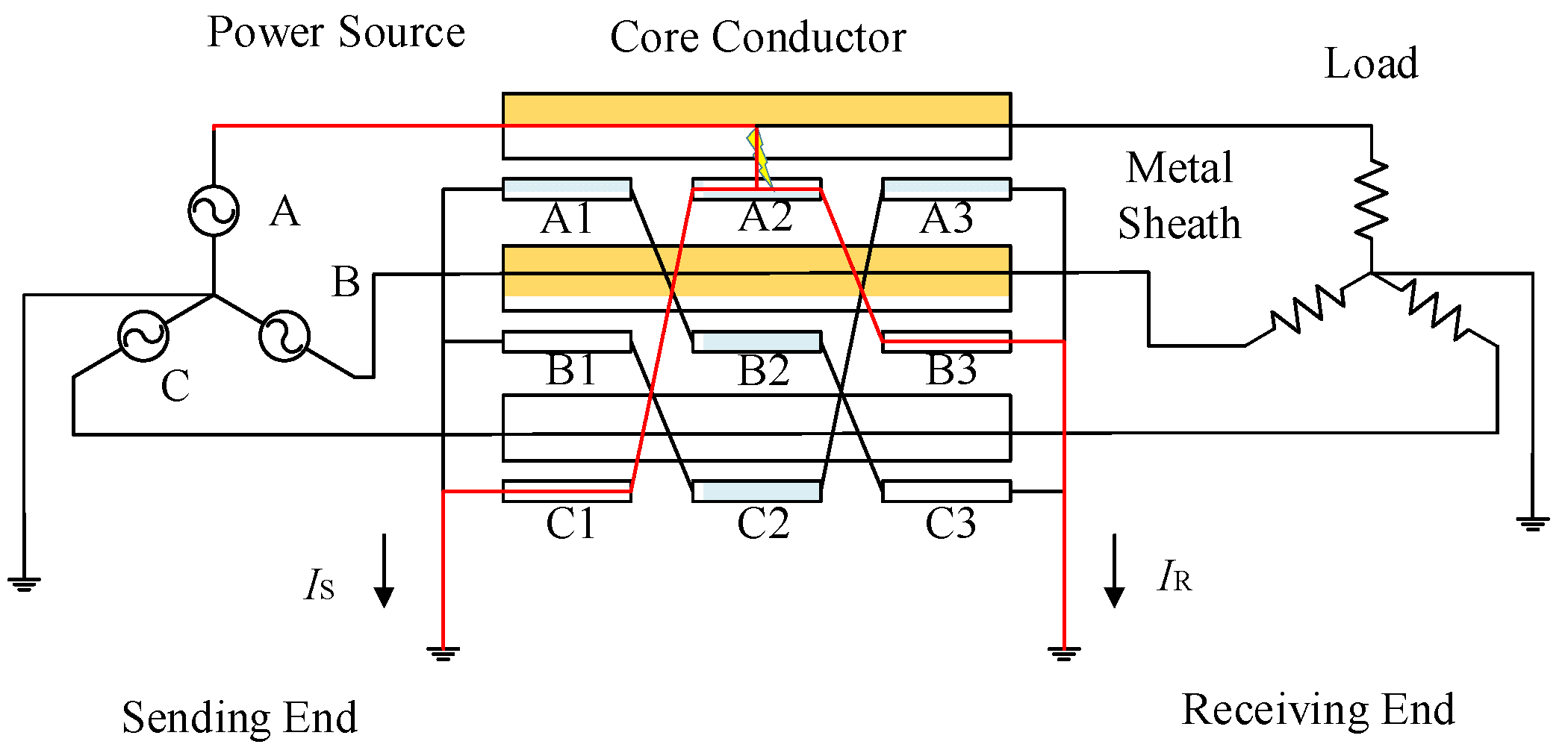
Assuming that a single-phase short circuit fault occurs in segment A2, as shown in
Figure 7, the current flowing in the core conductor from the power source to the fault point is the fault current, while the current flowing from the fault point to the load is nearly 0 A. The fault current flowing in the core conductor from the power source to the fault point induces much higher voltages in the metal sheath of cable segment A1 and part of A2, while the induced voltages in A3 and the other part of A2 is nearly 0 V. Meanwhile, there are higher induced sheath voltages at segments C1, A2, and B3. Due to the variation among the induced voltages, the sheath currents differ at every sensor position in the metal sheath circuit. For further illustration of the phase difference of the currents at either end of the fault cable segment, the circuit law is given in Equation (8) and the phase angle of
I is shown in Equation (9), where
I represents the current phasor,
U the voltage phasor,
R the resistance,
X the reactance,
j the imaginary unit,
θ the phase angle of
I, and
θU stands for the phase angle of
U.
According to Kirchhoff’s circuit law, the sheath current flowing from the fault point to the sending end
IS is shown in Equation (10). The sheath current flowing from the fault point to the receiving end
IR is shown in Equation (11). Their phase angles are shown in Equations (12) and (13), where
Uf is the voltage of the fault point;
UIS is the equivalent induction voltage of the sending end in the equivalent circuit;
UIR is the equivalent induction voltage of the receiving end;
r0 is the equivalent sheath resistance per unit length;
x0 is the equivalent sheath reactance per unit length;
LS is the length between the fault point and the sending end;
LR is the length between fault point and the receiving end;
If is the fault current flowing through the core conductor;
Inb represents the total currents in the other cable circuits laid in the same cable trench;
θS is the phase angle of
IS;
θR is the phase angle of
IR;
θUS is the phase angle of (
Uf +
UIS);
θUR is the phase angle of (
Uf +
UIR).
The phase difference of the current flow in the two directions (IS and IR) in the fault cable segment cannot be represented by a phasor expression as in Equation (9). The phase angle difference between IS and IR is approximately the difference between the P(segment) and 180°. As Equations (12) and (13) show, the difference between θS and θR mainly depends on the difference between θUS and θUR when Rg is very small. The difference between θUS and θUR depends on the difference between UIS and UIR.
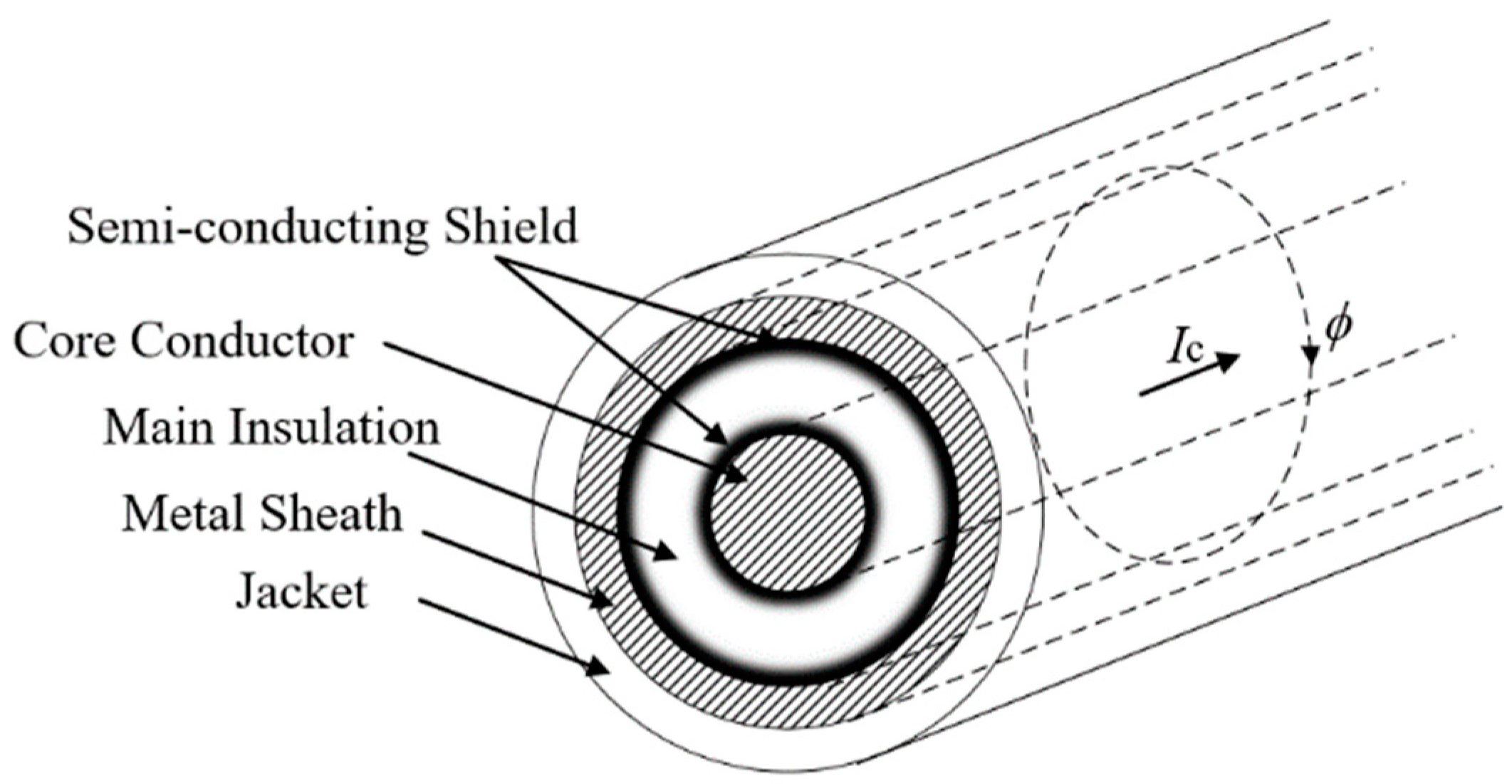
As shown in
Figure 8, a sheath voltage is induced by the cross-linked magnetic flux
Φ when a current
Ic exists in the core conductor. Assuming that
r1 is the core radius,
r2 is the outer radius of main insulation;
r3 is the outer radius of the metal sheath;
r4 is the outer radius of jacket. The cross-linked magnetic flux of unit length
Φ can be expressed in Equation (14). The induced voltage
e0 on the metal sheath of unit length
e0 can be expressed in Equation (15).
Let
ic(
t) =
Im sin(
ωt +
θ), the complex form of
ic(
t) is denoted using
Ic. Where
Im is the maximum of
ic(
t);
ω is the angular frequency of
ic(
t), and
ω = 2π
f;
f is the frequency of
ic(
t);
t is the time variable, and
θ is the time constant. The complex variable of
e0 can be expressed as in Equation (16).
The magnetic field can be changed by currents flowing through other cables within the same cable trench. However, the change is not remarkable due to the greater physical distance, and therefore the mutual coupling between adjacent cables is insignificant. Assuming that the change can be neglected,
UIR ≅ 0,
UIS can be expressed as Equation (17):
As Equation (17) shows, the greater the value of (LS·If), the greater is UIS. Meanwhile the phase difference becomes greater. If is the main determining factor of the difference between UIS and UIR. If is dependent on several factors, such as the grounding resistance, the fault position, the line voltage, and so on.
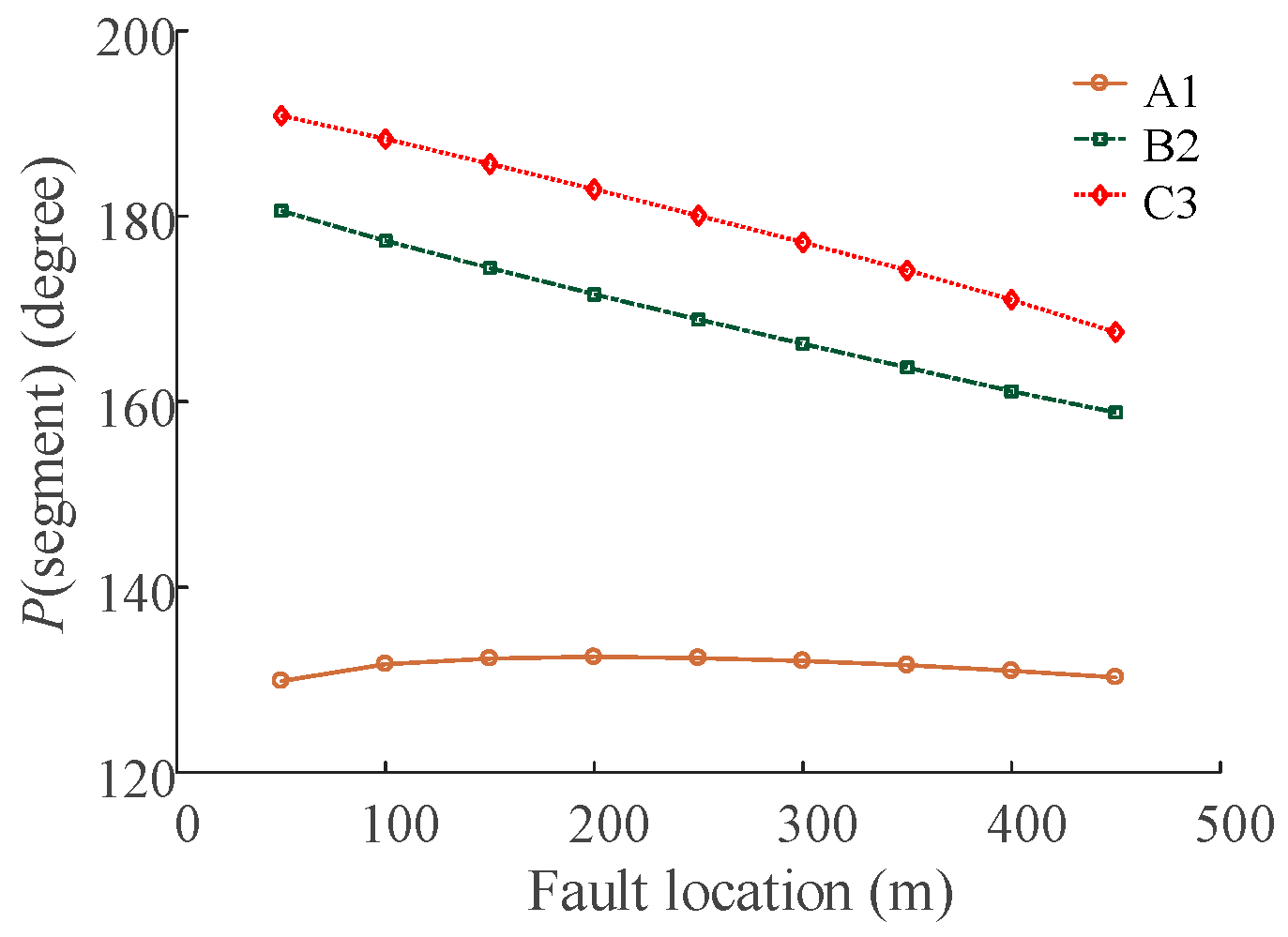
Further simulations were carried out to study the relation of
P(segment),
Rg, and the fault position. First, the load was set as 40 MW. The grounding resistance
Rg was set as 0.1 Ω. The location of the fault was allowed to change in steps of 50 m, e.g., 50~450 m, from the sending end along each minor section. The results of
P(segment) are shown in
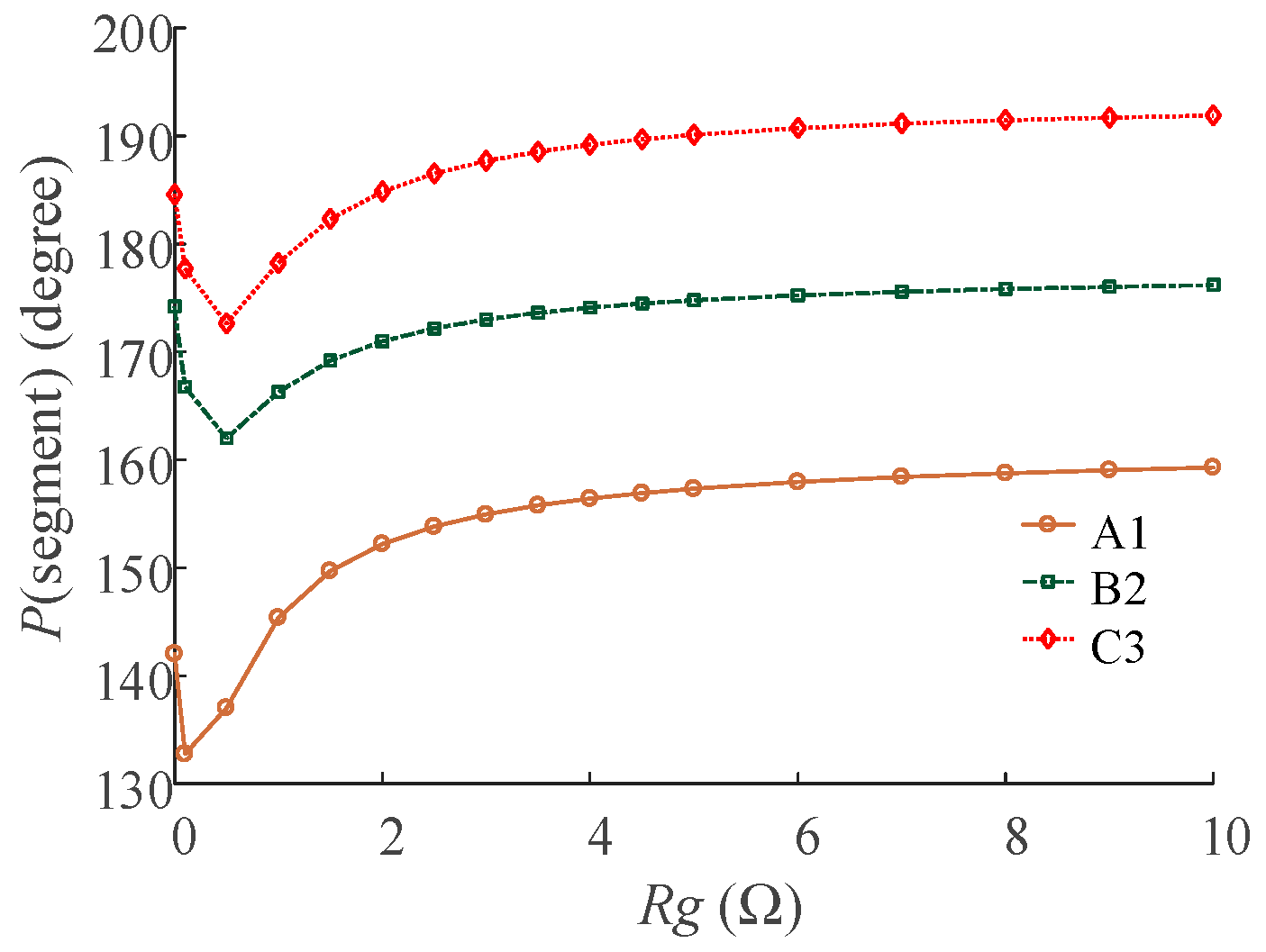
Figure 9 (segment ∈ {“A1”, “B2”, “C3”}). Second, the load was set to 40 MW. The location of fault point was set to 300 m from the sending end of each segment. The grounding resistance
Rg was allowed to change between 0~10 Ω. The results of
P(segment) are shown in
Figure 10 (segment ∈ {“A1”, “B2”, “C3”}).
The relationship between
P(segment) and fault location is shown in
Figure 9, and the relationship between
P(segment) and
Rg is given in
Figure 10. The
P(segment) is a function of the grounding resistance, the load and the fault location, which means that
P(segment) can be the criteria for fault location if the grounding resistance and the load can be obtained.
In this case, the fault segment can be identified without the need for accurate line and system parameters if the following two conditions are met:
- (1)
P(segment) ∈ [90°, 270°], segment ∈ Q, Q = {“A1”,“B1”,“C1”,“A2”,“B2”,“C2”,“A3”,“B3”,“C3”};
- (2)
P(segment’) ∈ [−10°, 10°], segment’∈ {x| x ∈ Q and x ≠ segment}.
The cable segment satisfying condition 1 above can be identified as the one with a fault. It is to be noted that if all the results of P(segment) meets condition 2 and none satisfies condition 1, the fault is outside the monitored cable section, or the fault is external.
To further investigate the recognition of the external faults, a simple power system model with three major cable sections was simulated. The fundamental simulation parameters were the same as the simulated power network shown in
Figure 4. Three rounds of simulation were carried out with the fault location set in cable segment A2, A5, and A8, respectively, as shown in
Figure 11. Note that only the current sensors installed at G1, G2, G3, G4, G5, and G6 were of significance for recognition of external faults, and they are shown in the diagram. As there are three major sections, the first step is to locate the major section with the short-circuit fault. The phase difference of the sheath currents at two ends of each major section is given in Equation (18), where S1A represents the cable sheath loop A1–B2–C3; S1B represents the cable sheath loop B1–C2–A3, S1C represents the cable sheath loop C1–A2–B3; S2A represents the cable sheath loop A4–B5-C6; S2B represents the cable sheath loop B4–C5–A6; S2C represents the cable sheath loop C4–A5–B6; S3A represents cable sheath loop A7–B8–C9; S3B represents cable sheath loop B7–C8–A9, and S3C represents cable sheath loop C7–A8–B9. The simulation results are shown in
Table 4.
As can be seen from
Table 4 for the fault in cable section A2/section 1, which is external to the major sections 2 and 3,
P(S2A),
P(S2B),
P(S2C),
P(S3A),
P(S3B),
P(S3C) meet condition 2. The same conclusion can be drawn from the cases where the fault happens in the cable sections A5 and A8. These suggest that the external fault can be identified if all the results of
P(segment) meet condition 2 and none satisfy condition 1.
4.3. Modified EMTR for Fault Point Location
After the fault segment is located, the next step is to locate the specific fault position in the cable segment where the fault happened. According to the EMTR [
13,
14,
15,
16], the fault position is where the greatest energy concentration appears. The location can be determined by a series of simulations of the back-injected time-reversed fault transients. The original EMTR method had the recorded signal reversed in the time-domain, before the energy of the signal for each a priori location (or “guessed fault location”) are calculated [
16]. However, the location procedure could be simplified by analyzing the energy of the recorded signal in frequency–domain (without calculating a priori locations). The amount of a priori locations determined the computation for the original EMTR method, because the energy of the time-domain signal corresponds to each a priori location. While the energy of the frequency–domain signal could be calculated only once as a function with the independent variable of the “guessed fault location”. In addition, with the modification, the method can be applied to situations where only sheath currents are available.
The frequency–domain expressions of electromagnetic transients generated by the fault were established in [
16] and presented in Equation (19), where
ρ1 represents the reflection coefficient at the line terminal
x = 0;
γ represents the line propagation constant;
xf represents the fault position;
IA1 represents the current observed at line the terminal
x = 0 in frequency domain; * represents the complex conjugate; and
If1 represents an equivalent current source at
x =
xf.
As ρ1 and γ are constants for a line with a given network topology and line parameters, IA1 can be obtained at the monitoring position (x = 0). Thus, If1 is a function with an independent variable xf; the point where there is a maximum If1 is the fault point.
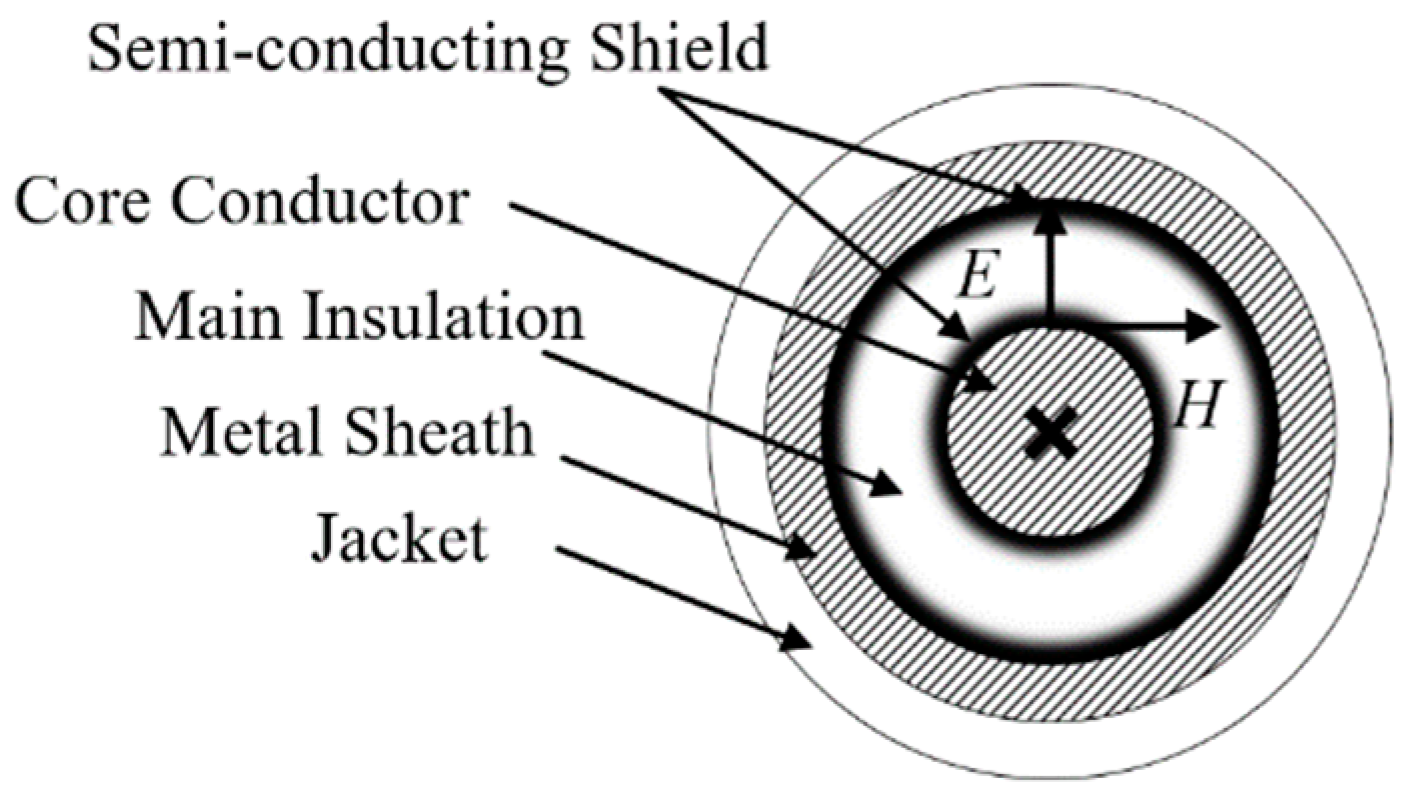
For a typical HV cable structure, the electric and magnetic field directions (
E and
H) are presented in
Figure 12. The energy propagates along the cable axis in the main insulation. As the traveling waves (fault transients) are essentially flows of energies, there is no difference between monitoring the waveform of traveling waves by setting the monitoring equipment at the core conductor or at the metal sheath.
The same simulation results (raw data of
I1a) shown in
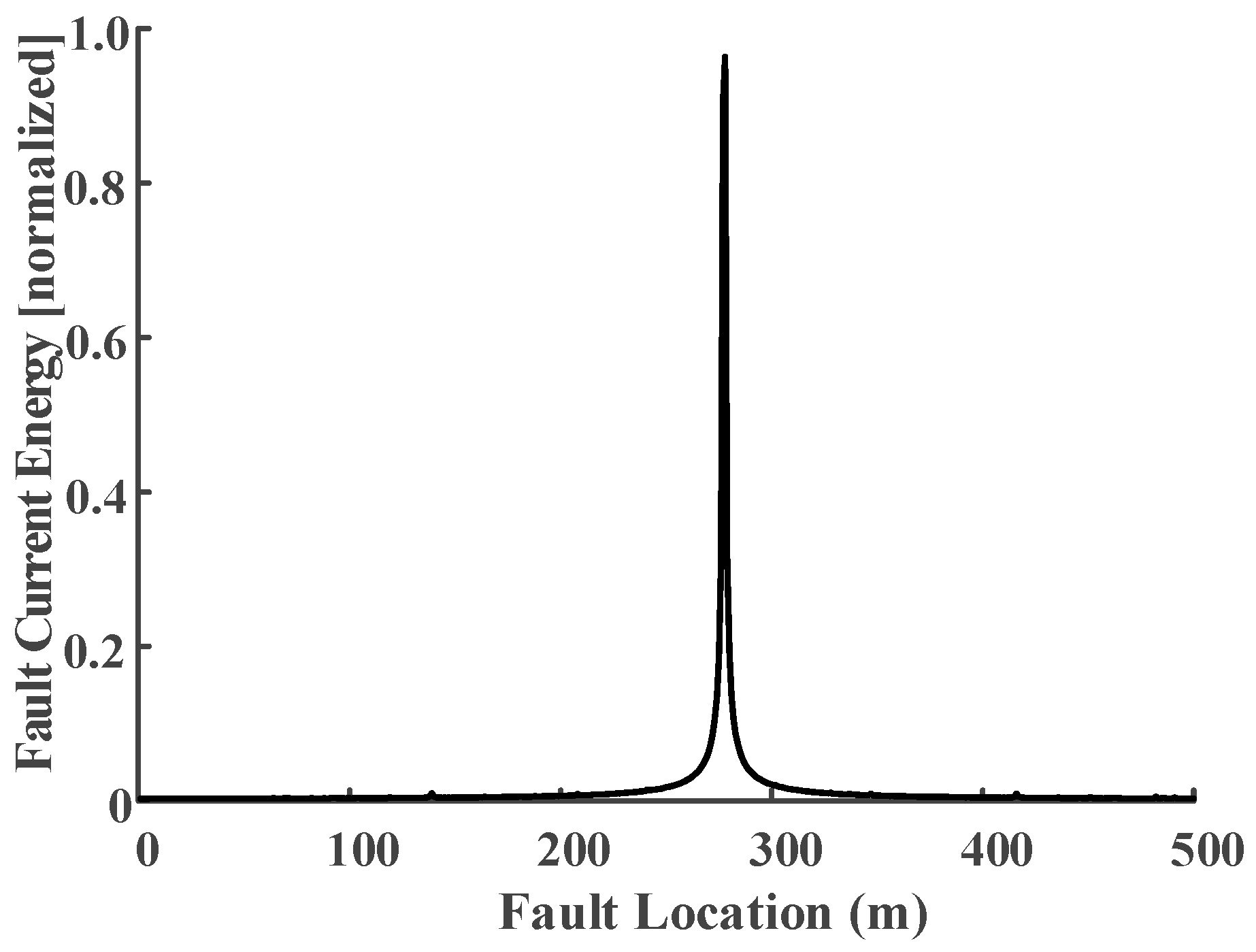
Figure 5 can be used as the input to illustrate the EMTR procedure. The difference in the utilization of the monitored sheath currents is the requirement of higher sampling rate. The power–frequency of the sheath currents are needed for fault segment location, while the fault transients are used for fault point location. The full frequency domain fault transient is the
IA1 in (19); thus, the function with the independent variable
xf (0 ≤
xf ≤ 500) can be shown in
Figure 13.
The result in
Figure 13 shows the normalized energy of the sheath current
I1a within a frequency spectrum from dc to 5 MHz (sampling rate: 10 MHz), and it is also the function of
I1a versus the independent variable
xf.
Clearly, there is a location error between the real fault position and the largest concentration point, though it is still within engineering tolerance [
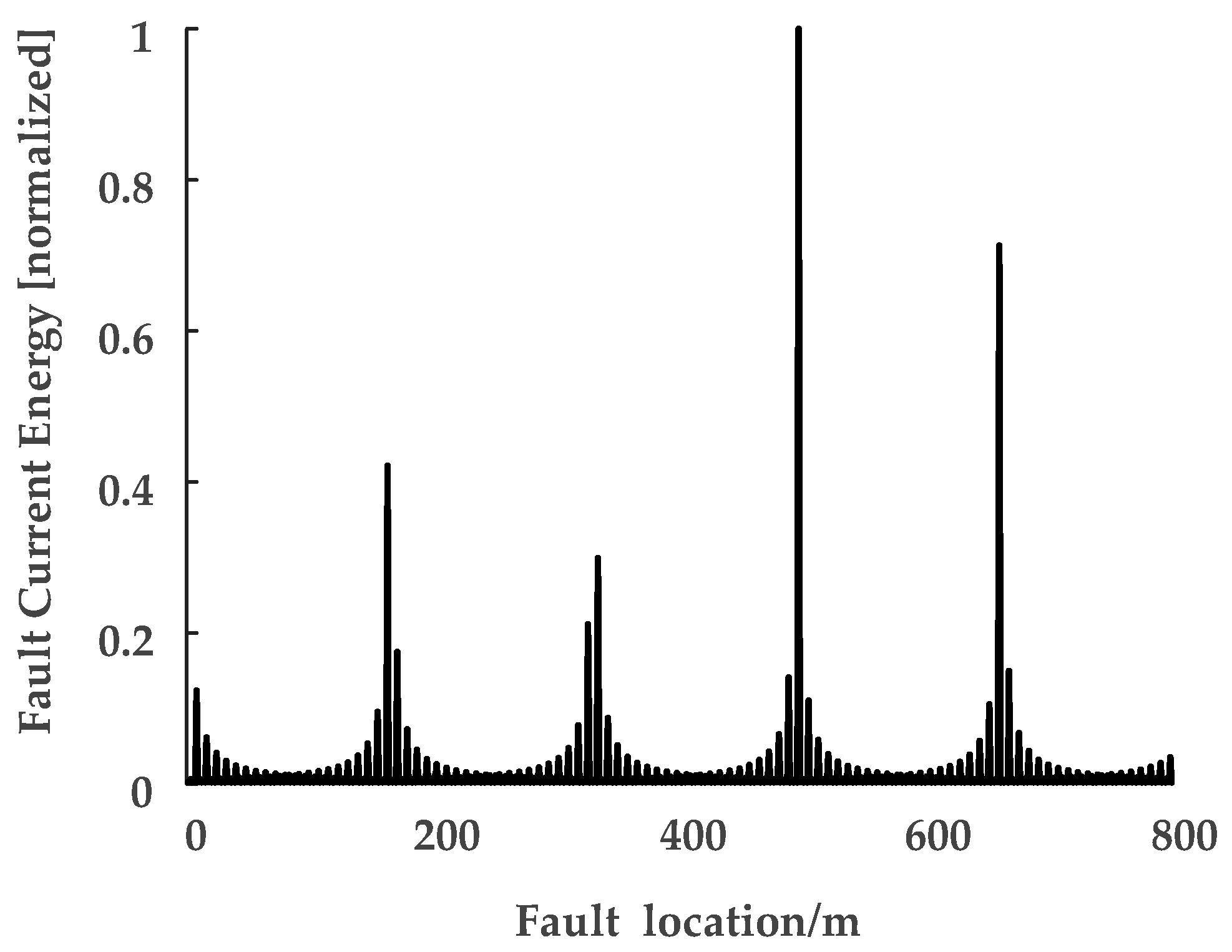
25]. Simulations for faults occurring in other cable segments generated similar results. Further simulations have been carried out for an 800-long cable segment, where the sampling rate was set as 100 MHz. The result of the fault current energy with the independent variable
xf (0 ≤
xf ≤ 800) is shown in
Figure 14.
The location accuracy of the result shown in
Figure 13 is better than the result shown in
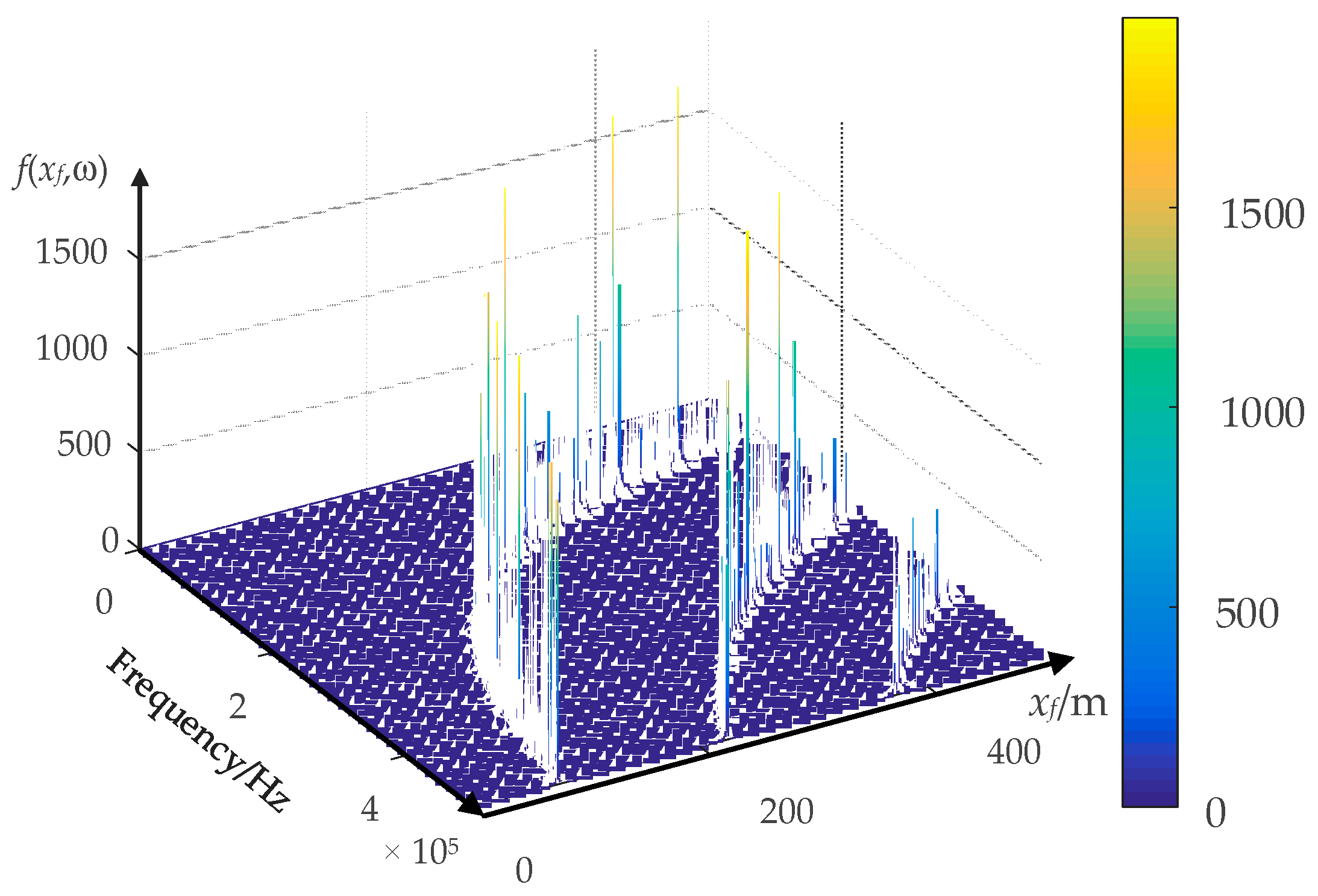
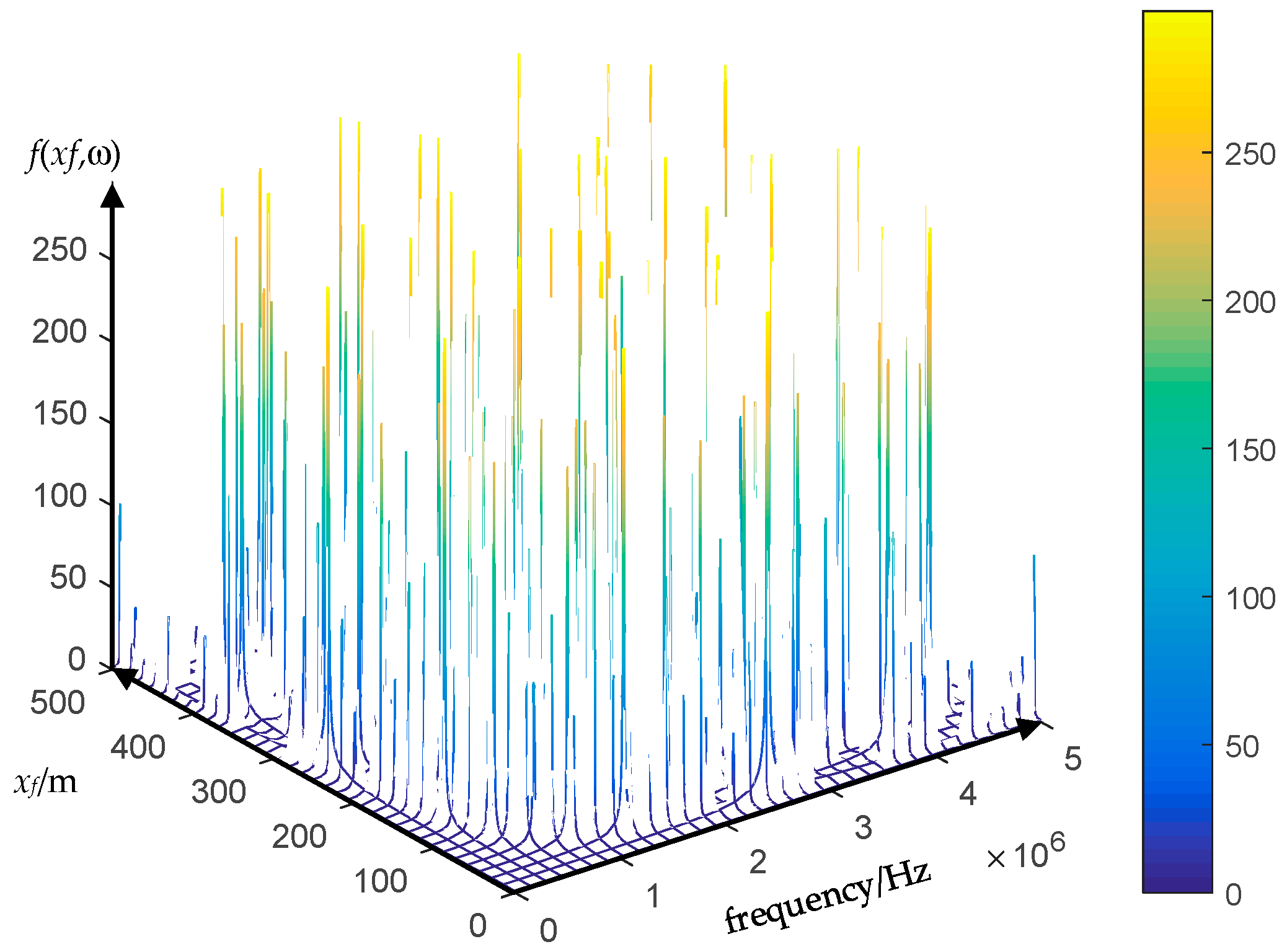
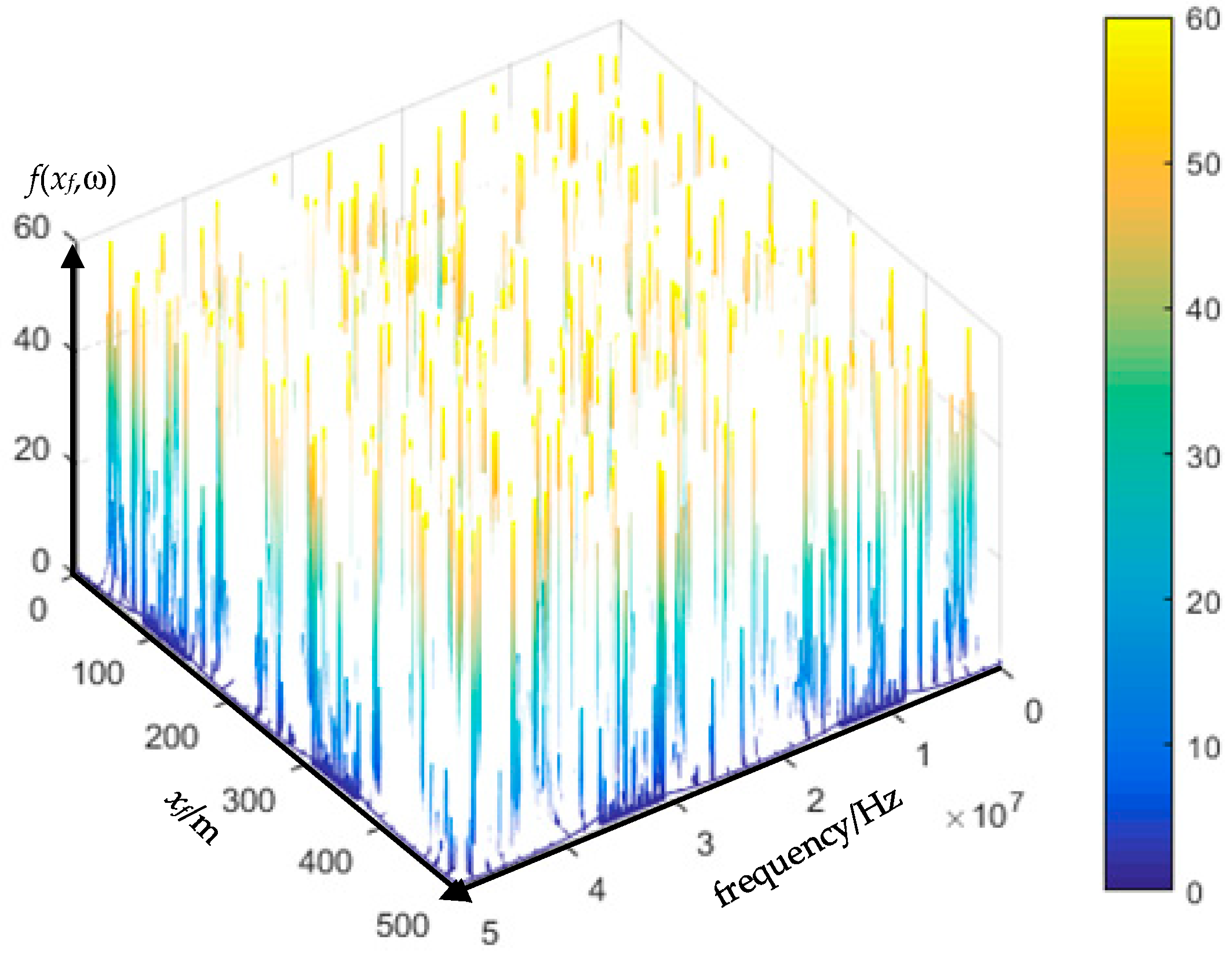
Figure 12. Theoretically, the fault position is the largest energy concentration position. However, the fault location accuracy depends on the accuracy of the electromagnetic transients transfer function (Equation (19)). The sampling error can cause inaccuracies in the FFT spectral energy analysis, which eventually leads to inaccuracy of the electromagnetic transients transfer function. The figures of the electromagnetic transients transfer function under different sampling rates are presented in
Figure 15,
Figure 16 and
Figure 17.
The transfer function
f(
xf,ω) of electromagnetic transients differs with the sampling rate as presented in
Figure 15,
Figure 16 and
Figure 17, and it is not a “smooth” function. It is a grass-like shape, or it becomes denser as the sampling rate increases. The higher sampling rate, the closer the results are to the reality. Therefore, the simulation results suggest that the sampling rate should be 10 MHz or higher.
4.4. Case Study—An External Fault detected by the Online Cable Fault Location System
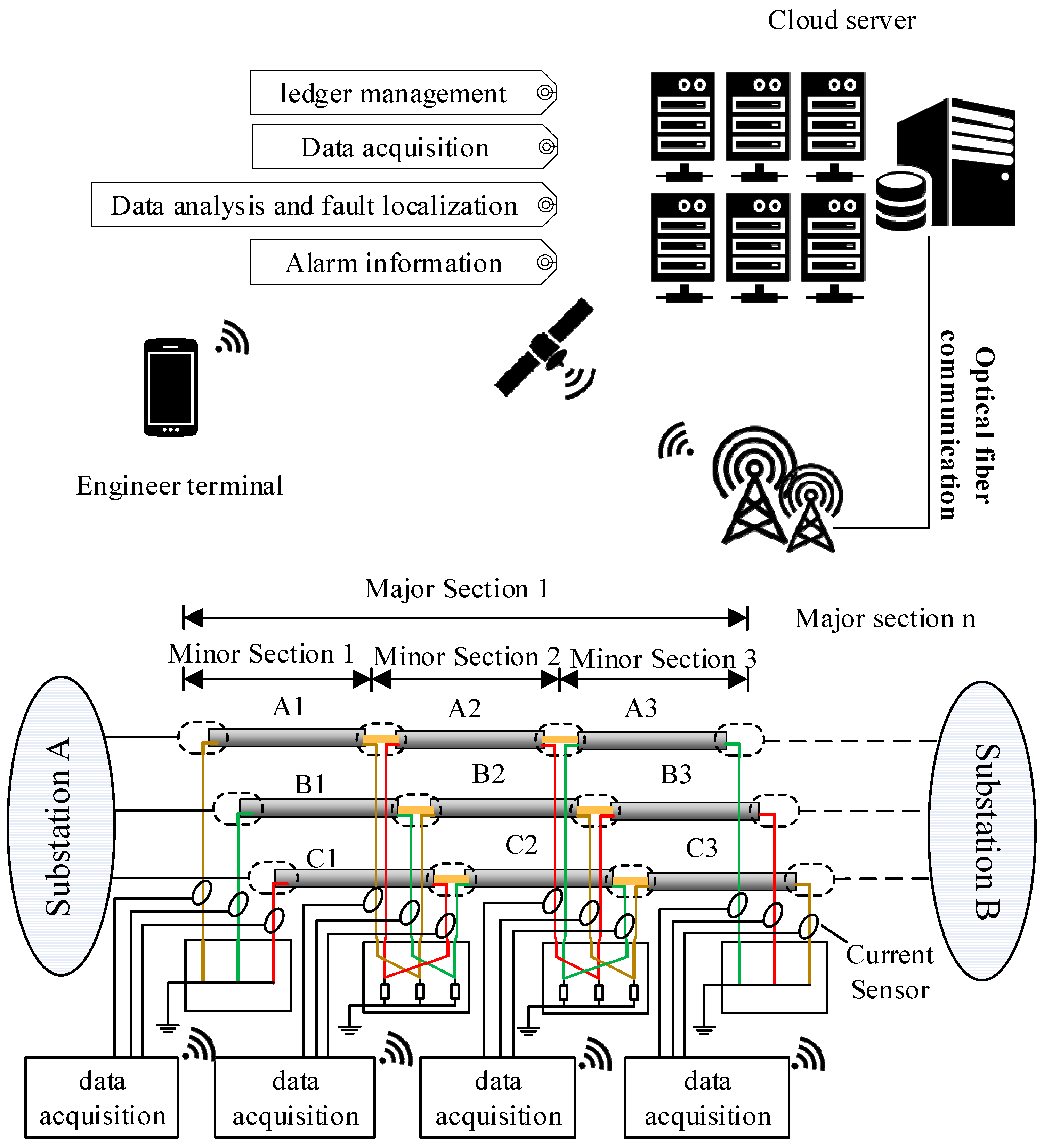
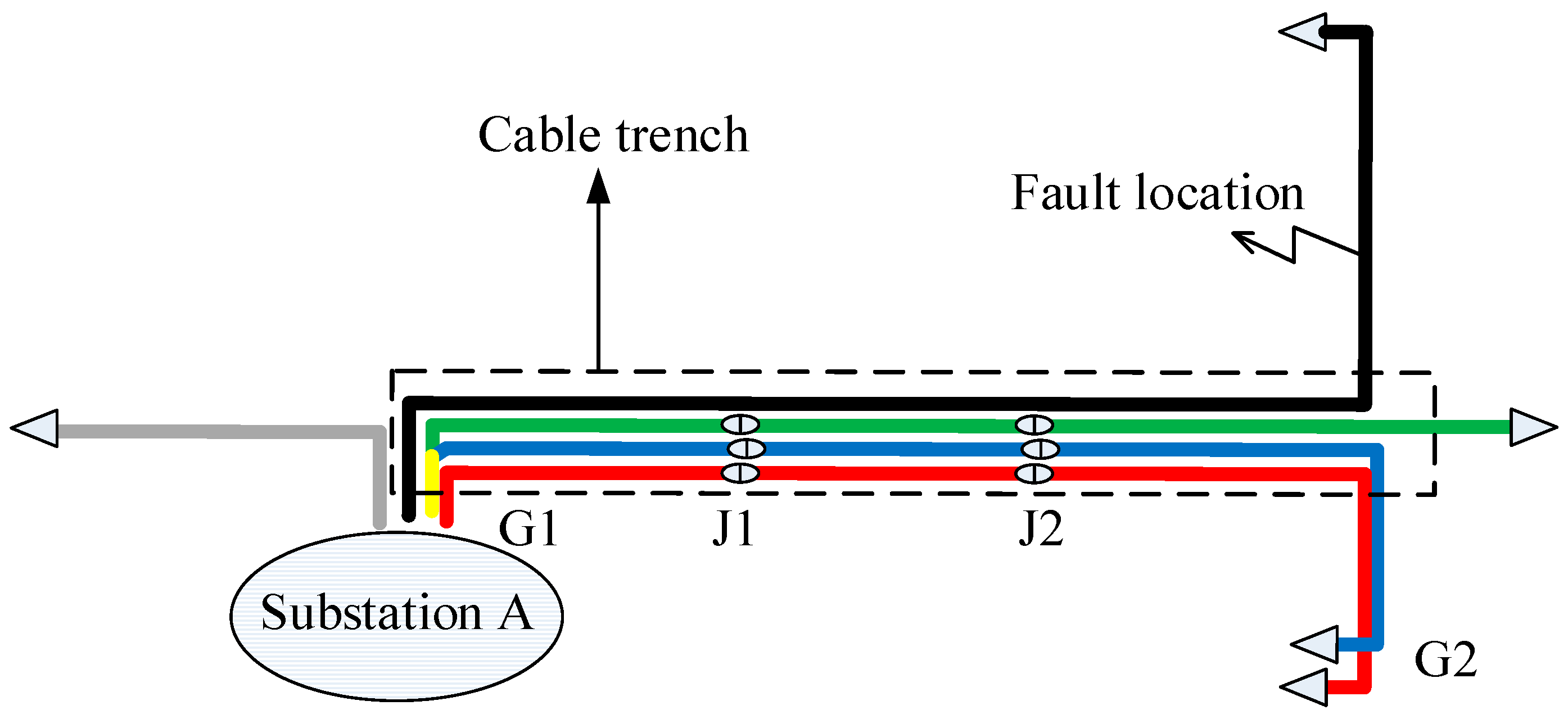
In order to obtain the fault data in real HV cable systems and to confirm the effectiveness of the online fault location system, a 110 kV cable circuit with a major section was chosen to be implemented with the proposed online fault location system. The connections of the cable section where the sensors and data acquisition systems were installed is shown in
Figure 1. The 110 kV HV cable circuit is in the city of Suzhou, China. The cable passage is shown in
Figure 18, where G1, J1, J2, G2 are the four current sensor installation positions, as described in
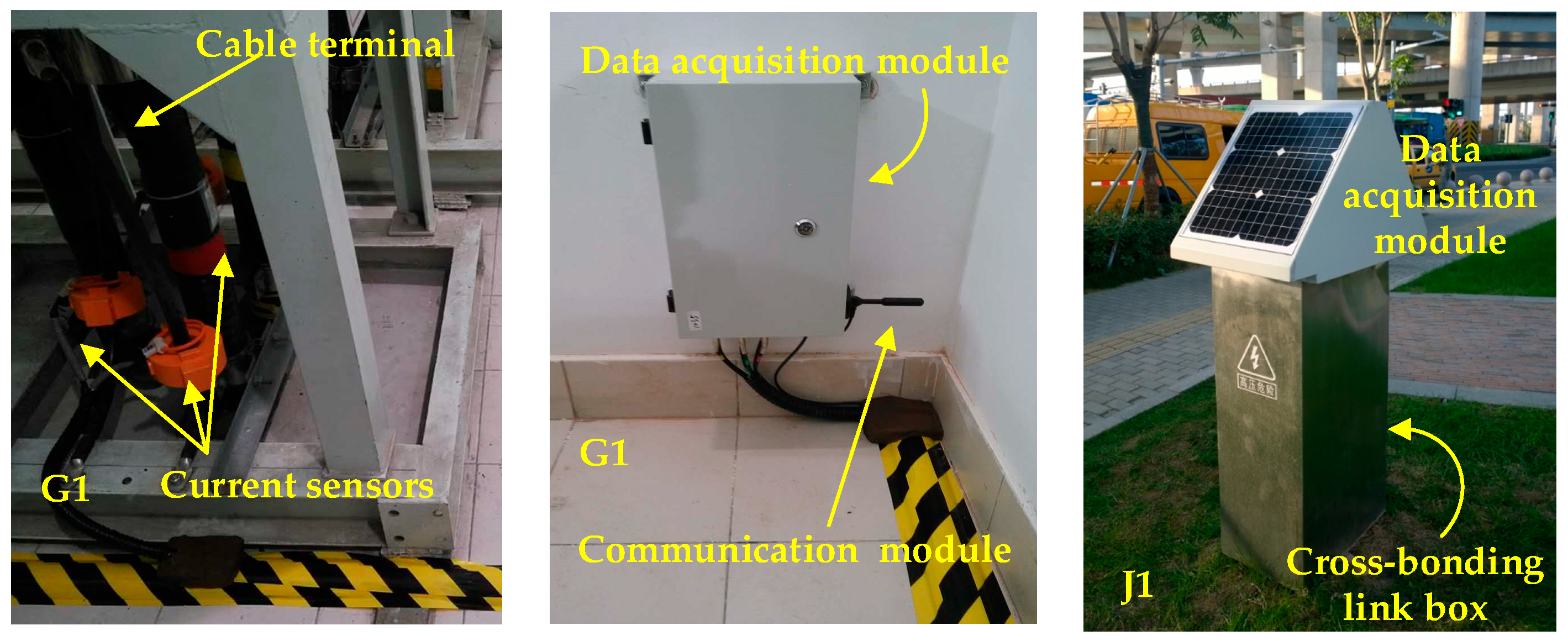
Section 2 of the paper, and the on-site installation is shown in
Figure 19. The first two pictures in
Figure 19 were taken in the indoor substation A (G1). The data acquisition module and the communication module was directly installed indoors using the power supply of the substation. The cross-link boxes are above the ground in Suzhou, as shown in the last picture of
Figure 19. The data acquisition module and the communication module was installed in a custom cabinet, and a couple of solar panels were used for power supply.
As shown in
Figure 18, the same substation also feeds other cable circuits, some in the same cable trench, including two 35 kV and three 110 kV cable circuits, which were started from substation A. The red, blue, and green lines (the bottom three circuits) in the diagram represented the three 110 kV cable circuits, whilst the black and gray lines represented the 35 kV circuits. Four cable circuits share the same cable trench, of which the 3-phase circuit in the bottom and marked in red was the one equipped with an online monitoring system. On 8 December 2016, a fault occurred in the black-colored 35 kV cable circuit. Before the fault was cleared, all four sets of data acquisition equipment were triggered due to the sheath currents in the HV cable exceeding the preset alarm level of 70 A. (The preset trigger current in the system designed by the authors is 70 A. This low level of trigger current allowed high-resistance faults to be detected. In fact, the equipment could be triggered even if the fault resistance is as high as 907 Ω in the 110 kV line. It is true that the minor sections hardly have equal lengths in practice, which can cause relatively high sheath currents under normal operation. However, under normal operation conditions, this circulating current rarely reaches a level of 30 A, due to unequal lengths among the minor sections. In case of the extreme cases where cable sheath circulating under normal conditions can reach a level of 70 A, the trigger current can be raised. The level of the sheath current can be readily evaluated in advance using the model given in [
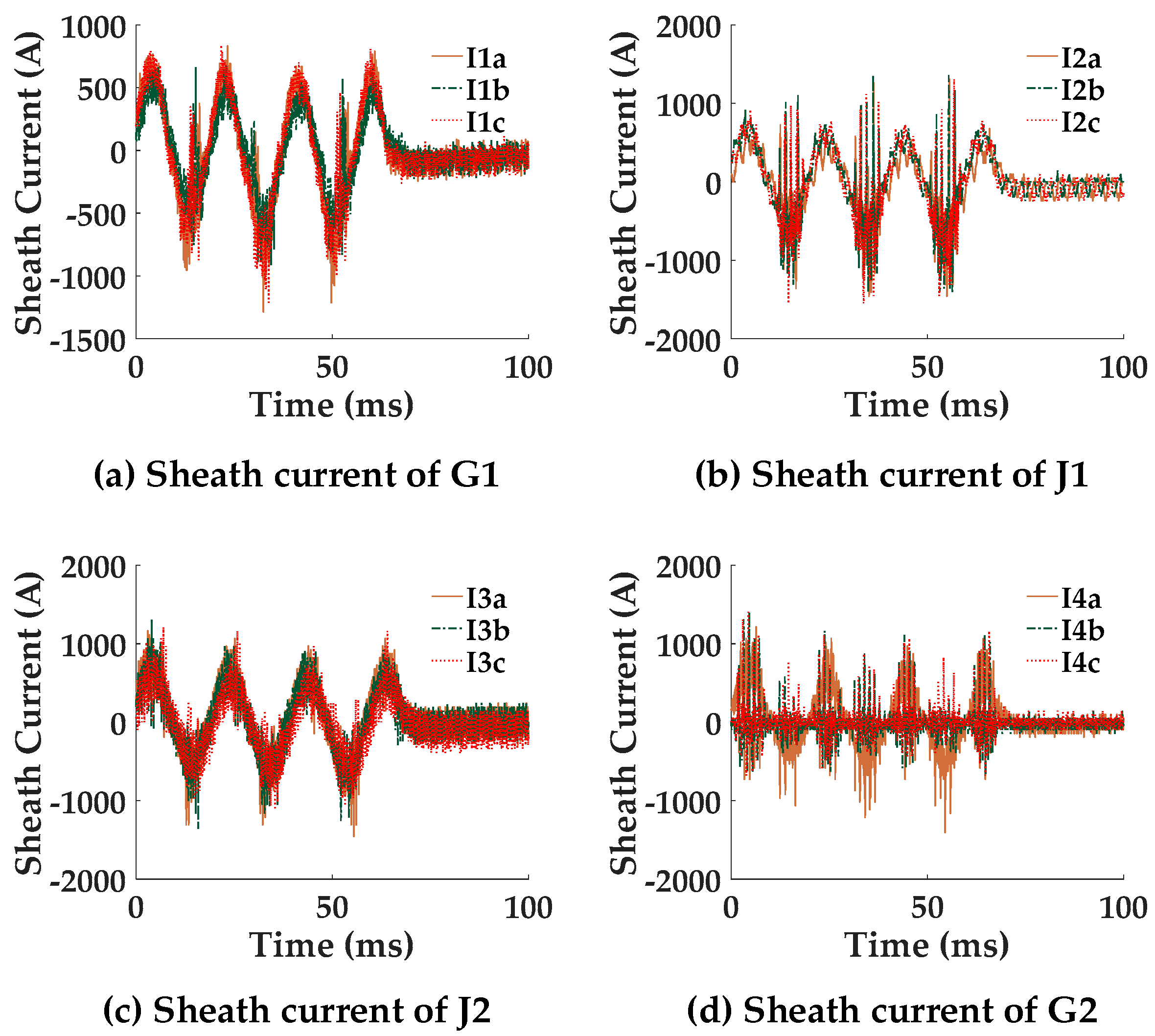
16]) The sheath currents recorded by the proposed fault location system are shown in
Figure 20.
Although the signal noise level was high as
Figure 20 shows, the fundamental phase difference of each segment
P(segment) is almost 0, which means the fault did not originate from any of the sections equipped with the online monitoring equipment. The specific results of each phase difference
P(segment) are all presented in
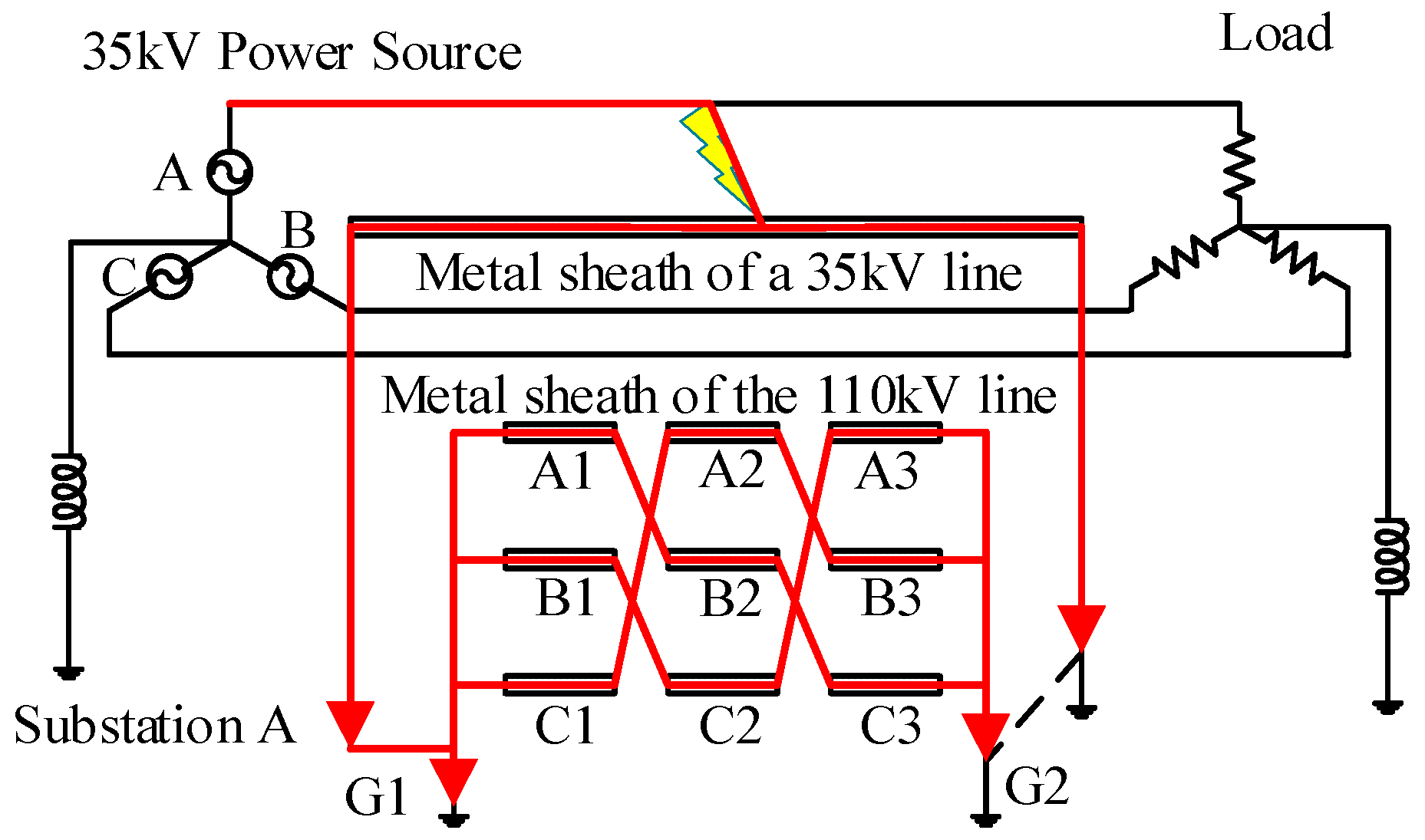
Table 5. They all met condition 2 of the criteria for fault segment location, which suggests that the fault was external to the cable section being monitored. For further research, the equivalent circuit representing the circuit connections at the time that the fault happened is shown in
Figure 21.
When the fault occurred in the 35 kV cable circuit, which was connected to the same substation as the HV circuit being monitored, the fault current flowed into ground through the metal sheath of the 35 kV cable system. Meanwhile, part of the fault current flowed into ground directly at substation A (G1). The fault current also flowed through the metal sheath of the 110 kV circuit as it formed part of the fault current path. This resulted in the excessive level of sheath current that triggered the fault location equipment.
The external fault was caused by a short-circuit fault outside the cable circuit in which the monitoring system was installed. However, the metal sheath of the fault cable circuit shared the same grounding network with the cable equipped with the online monitoring system. The detection and correct classification of the external fault by the monitoring system helped to prove the effectiveness of the monitoring system.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}