An Autonomous Solar-Powered Marine Robotic Observatory for Permanent Monitoring of Large Areas of Shallow Water

 ,
,
Abstract
:1. Introduction
2. State of the Art
2.1. Static Monitoring Solutions: Buoys and Sensor Networks
2.2. Autonomous Monitoring Solutions: Marine and Underwater Vehicles
2.3. Dual System: ASV-Buoy
3. General Description of the Dual Observatory
- -
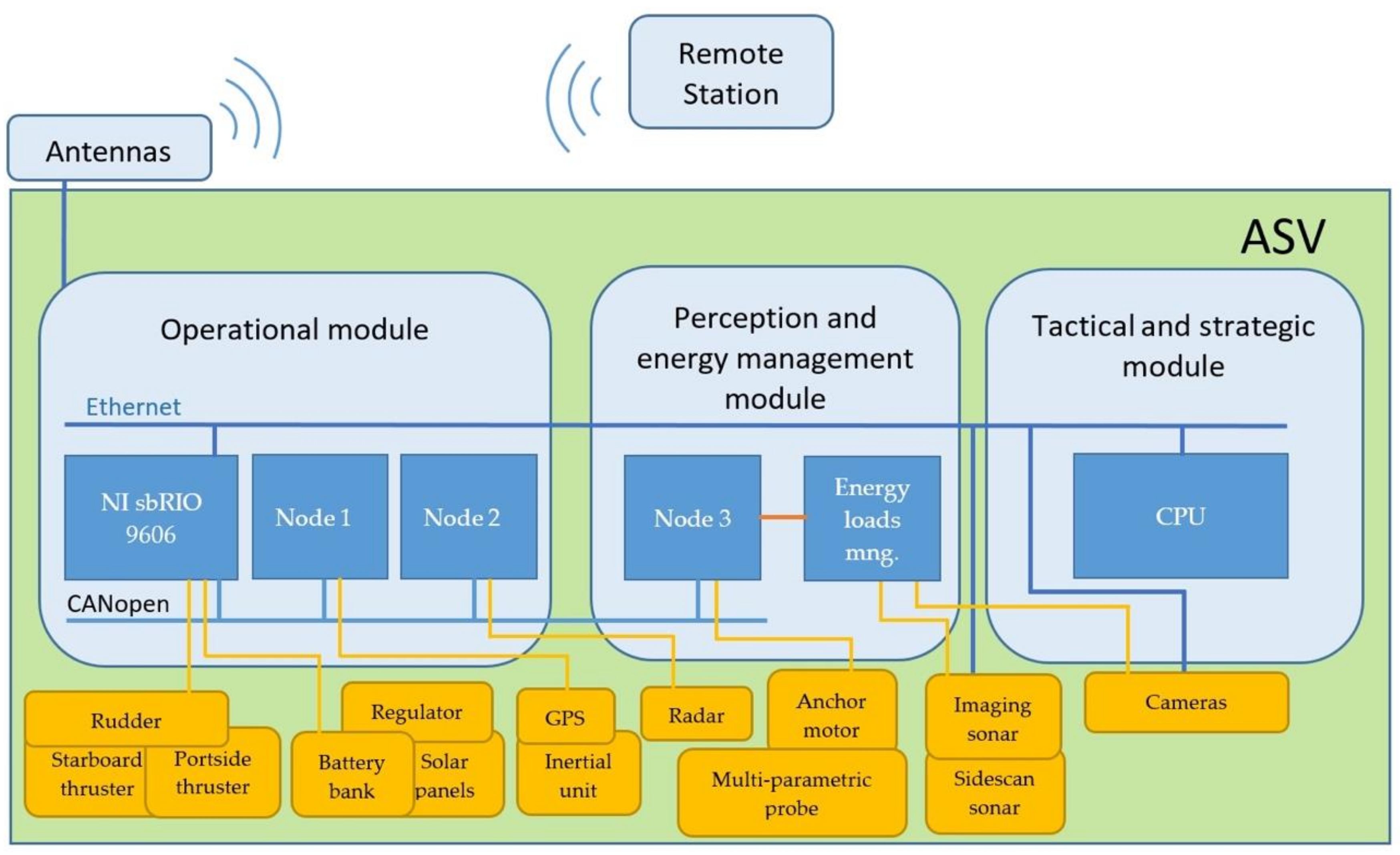
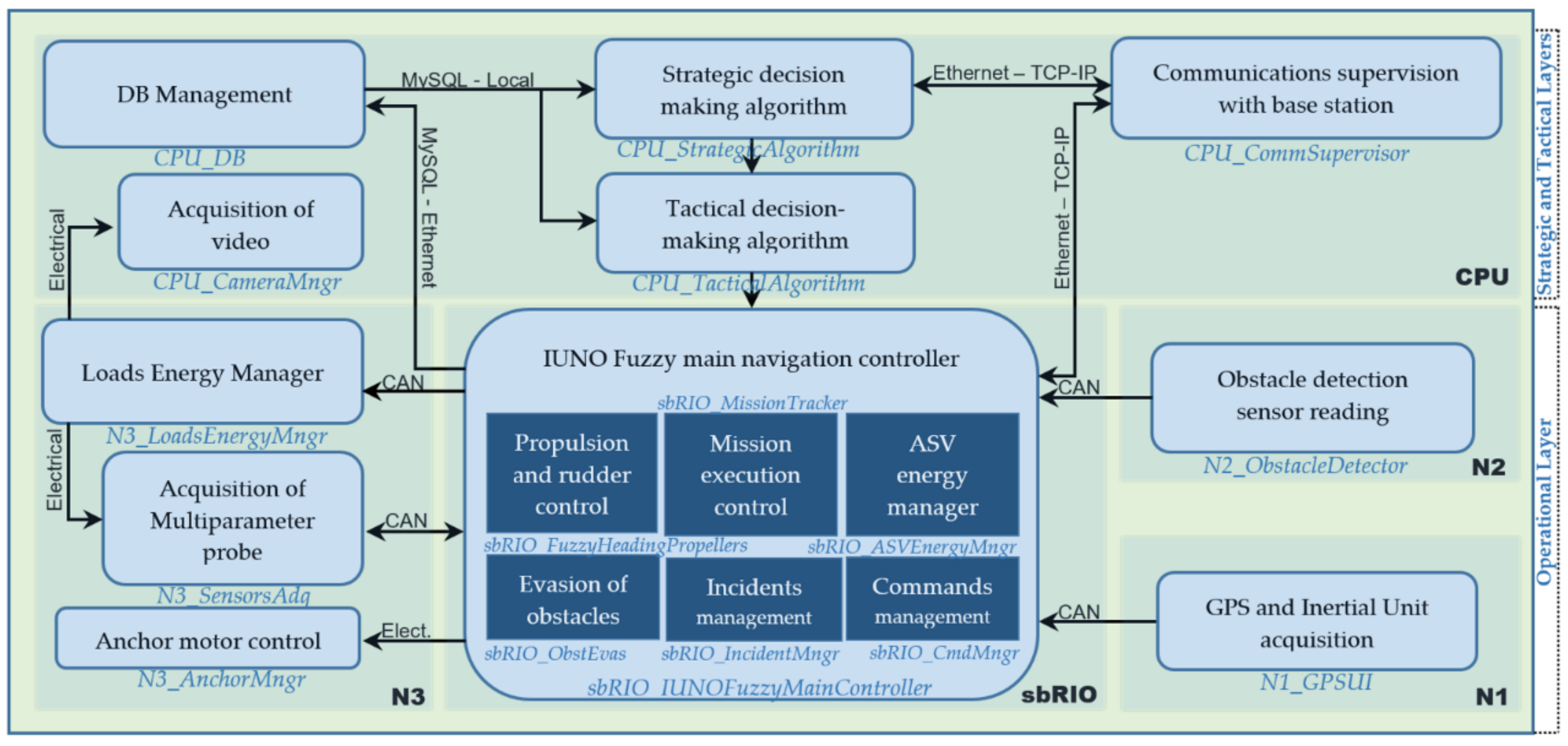
- Operational Module, responsible for the navigation, consisting of a National Instrument sbRIO 9606 main controller and two microcontroller-based electronic cards.
- -
- Energy Sensing and Management Module, consisting of an electronic card based on a micro-controller, which acquires information from the different sensors, checking their status periodically and managing energy. It also controls the anchor deployment and retrieval motor.
- -
- Tactical and Strategic Module, responsible for operating the decision-making algorithm and storage and management of the acquired data. This module is a single-board DFRobot Lattepanda computer based on the Intel Atom Cherry Trail.
3.1. Energy Management System
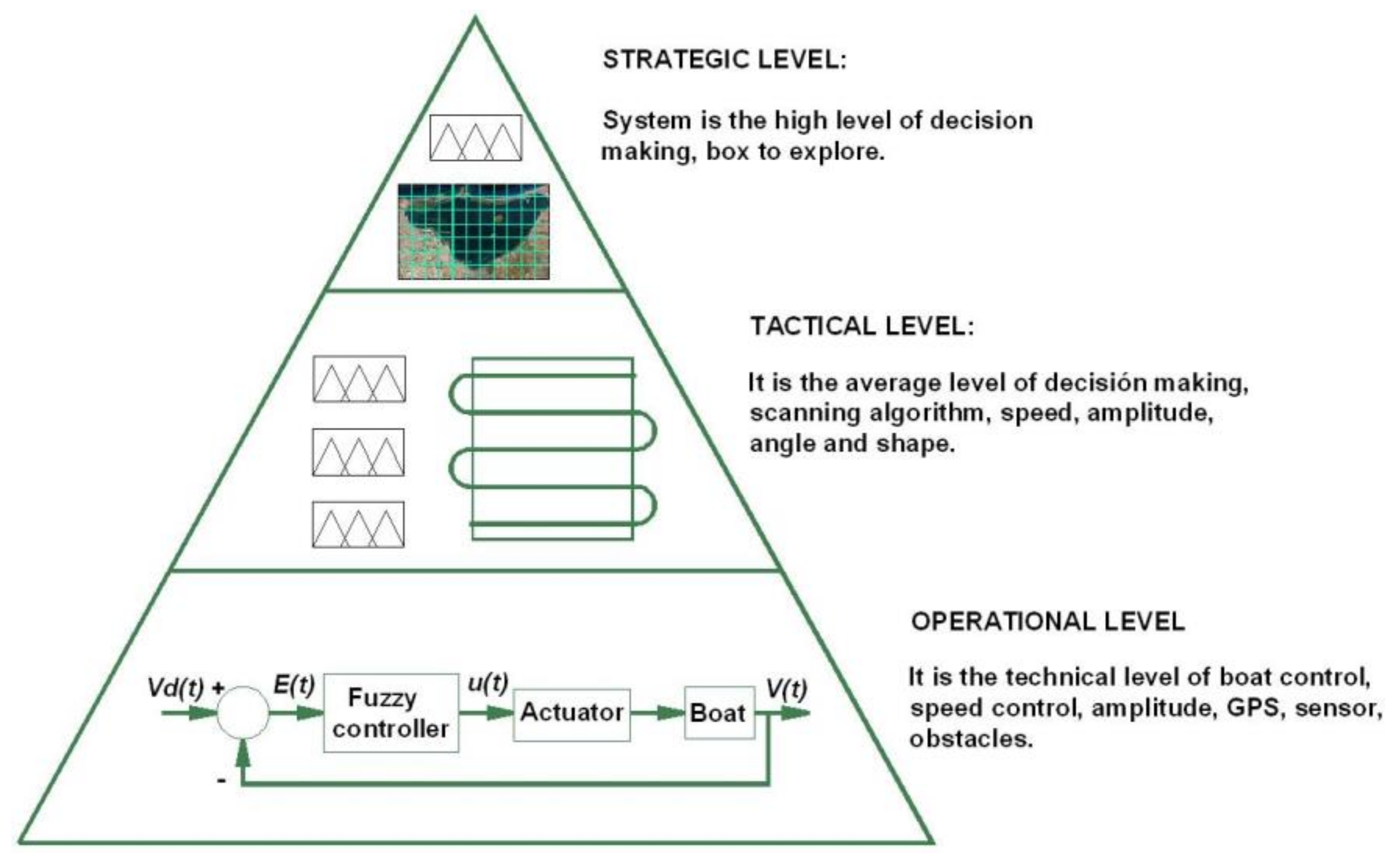
3.2. Decision-Support System
3.3. Control Hardware Architecture
3.4. Software Architecture
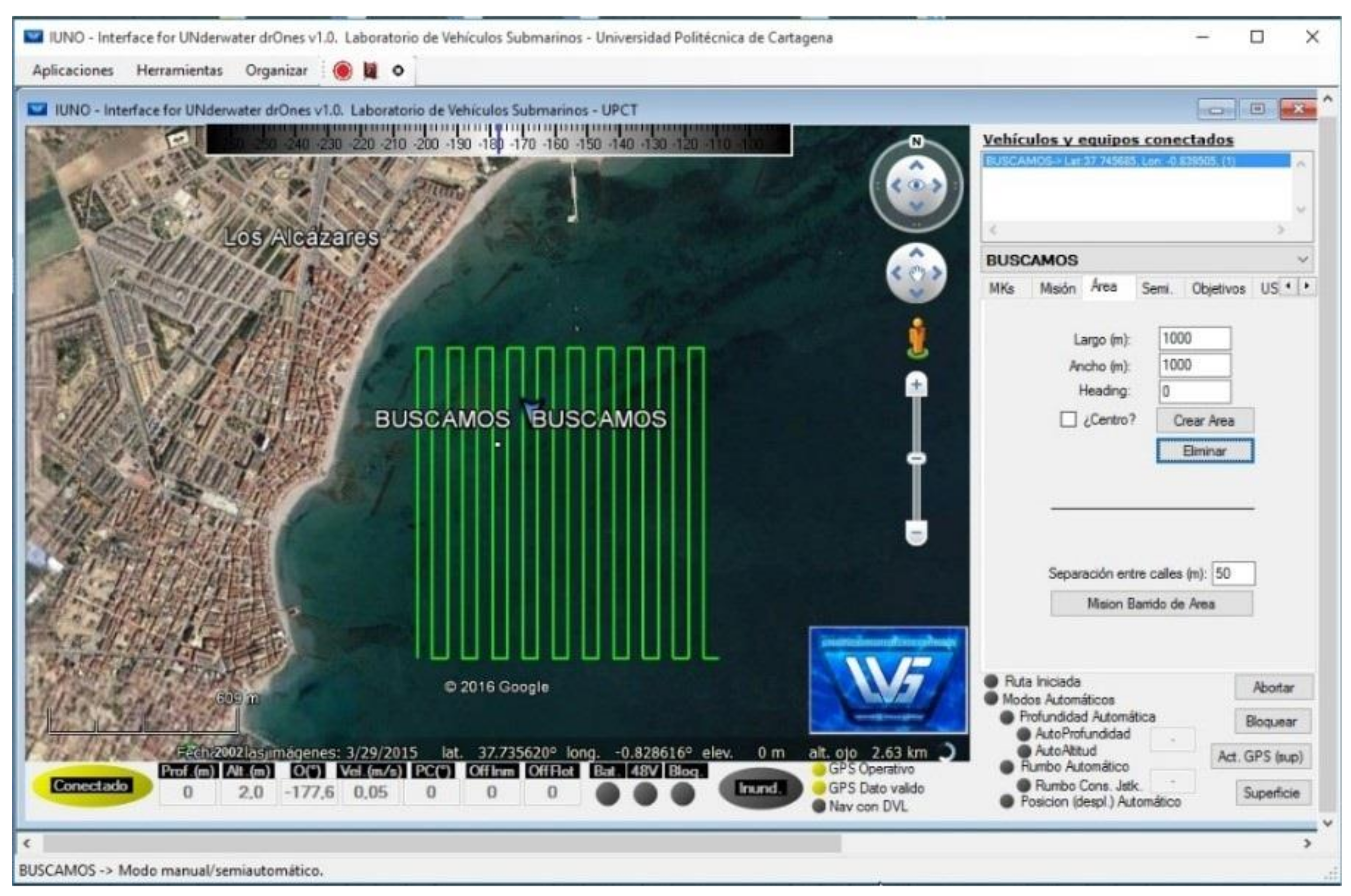
3.5. Command, Control, Communication and Computation Station: IUNO
4. Design of Strategic Decision-Making Layer and Application to the Observation Mission in the Mar Menor
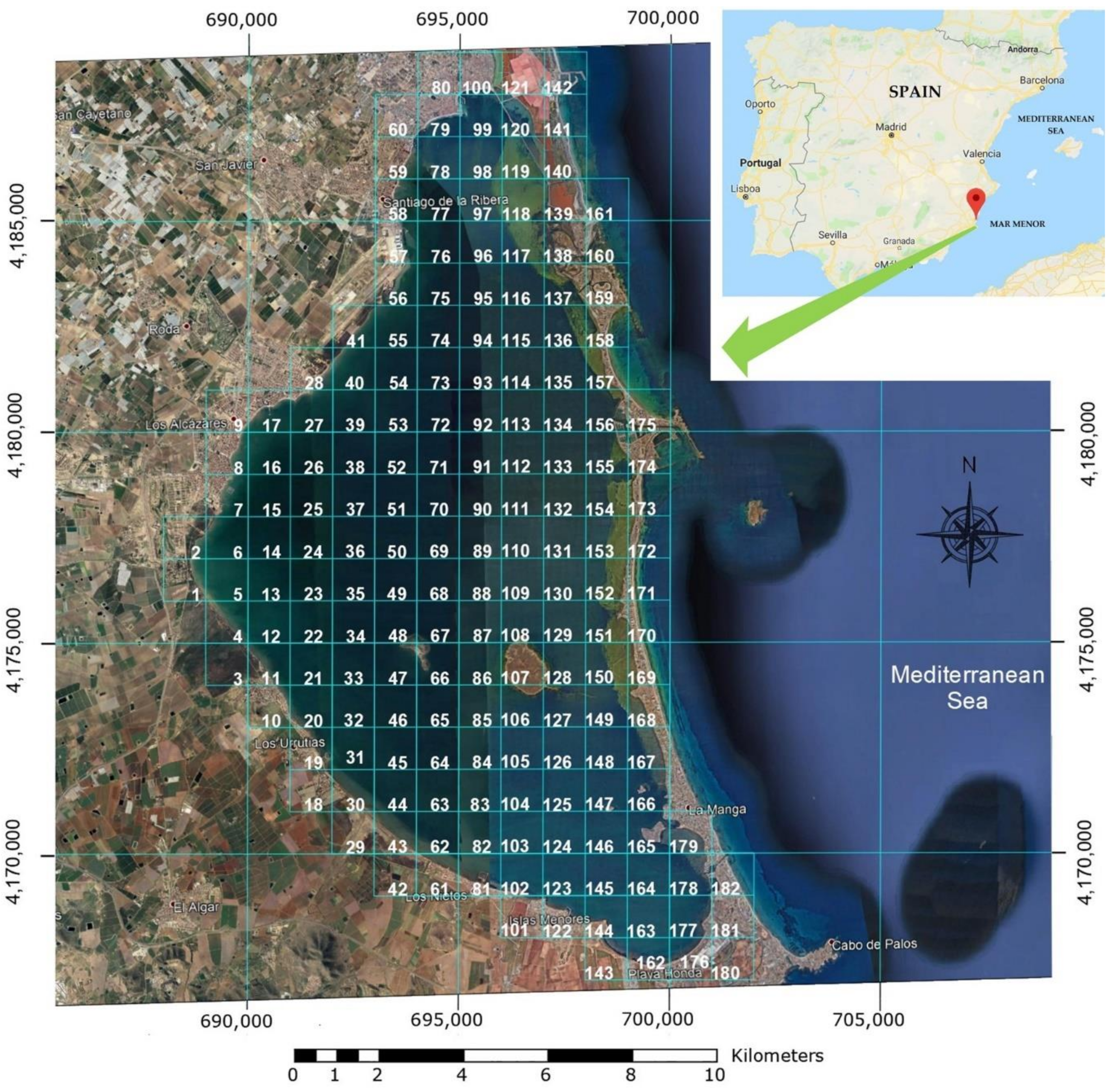
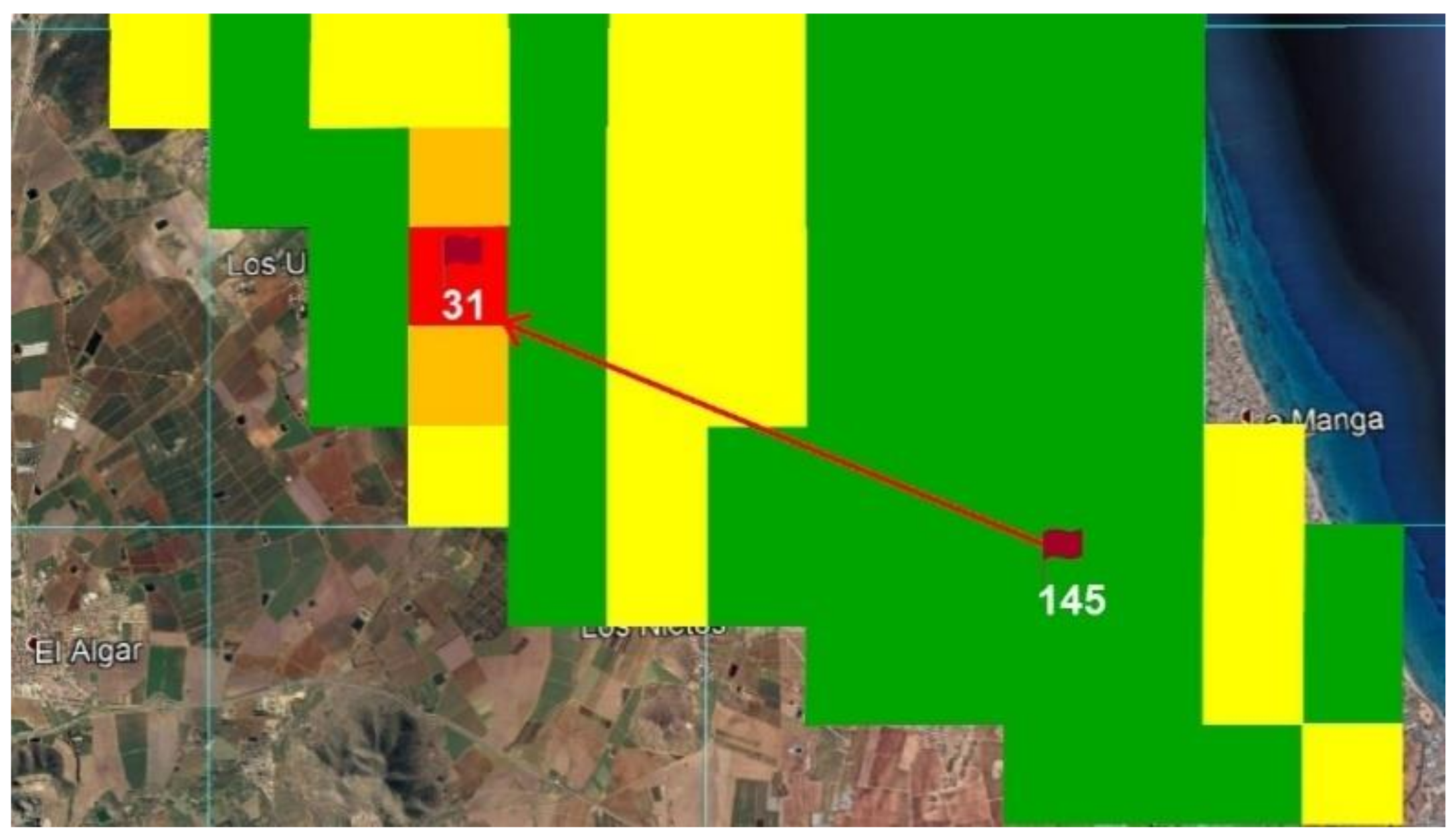
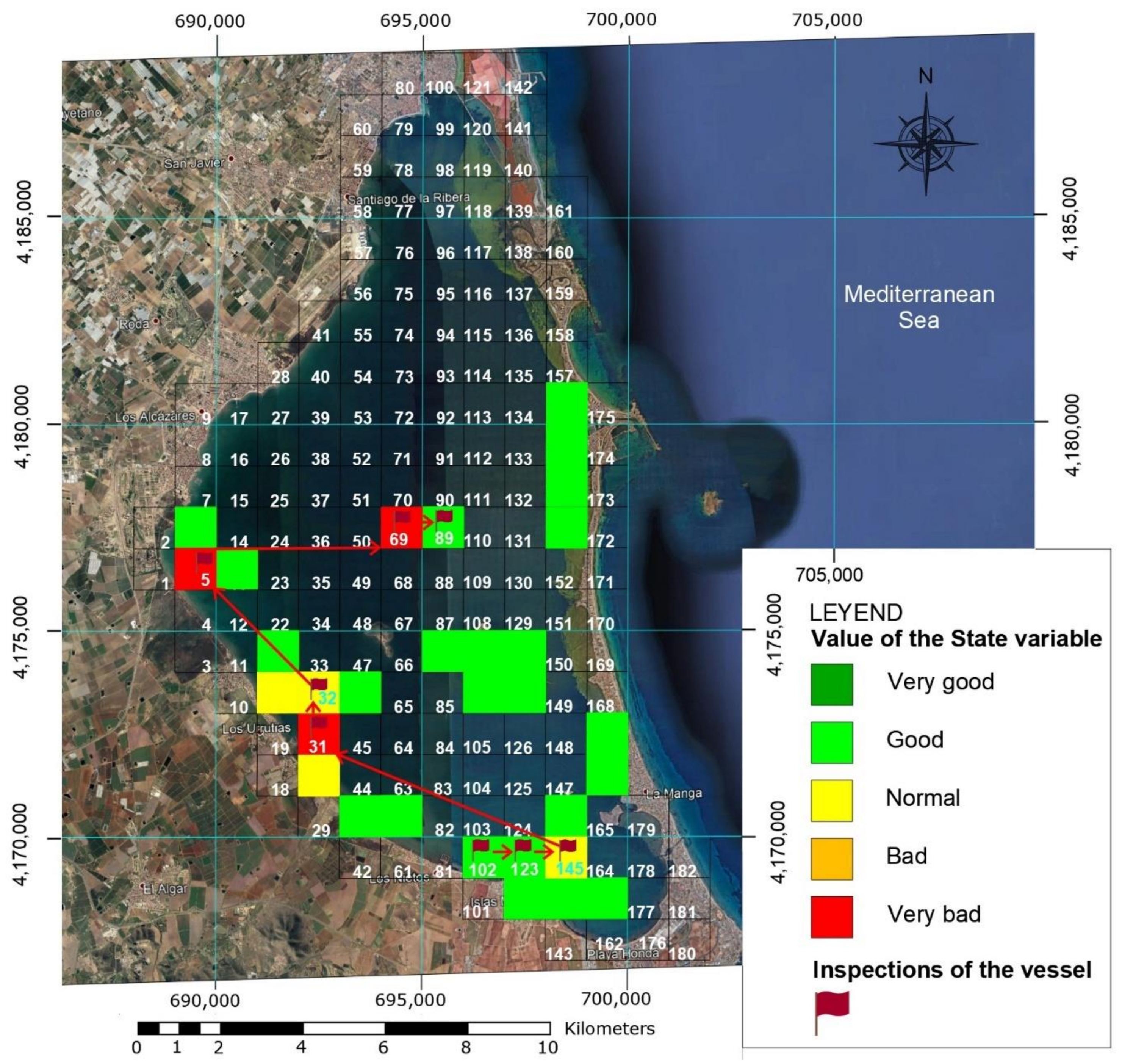
4.1. Classification of Exploration Areas in the Mar Menor
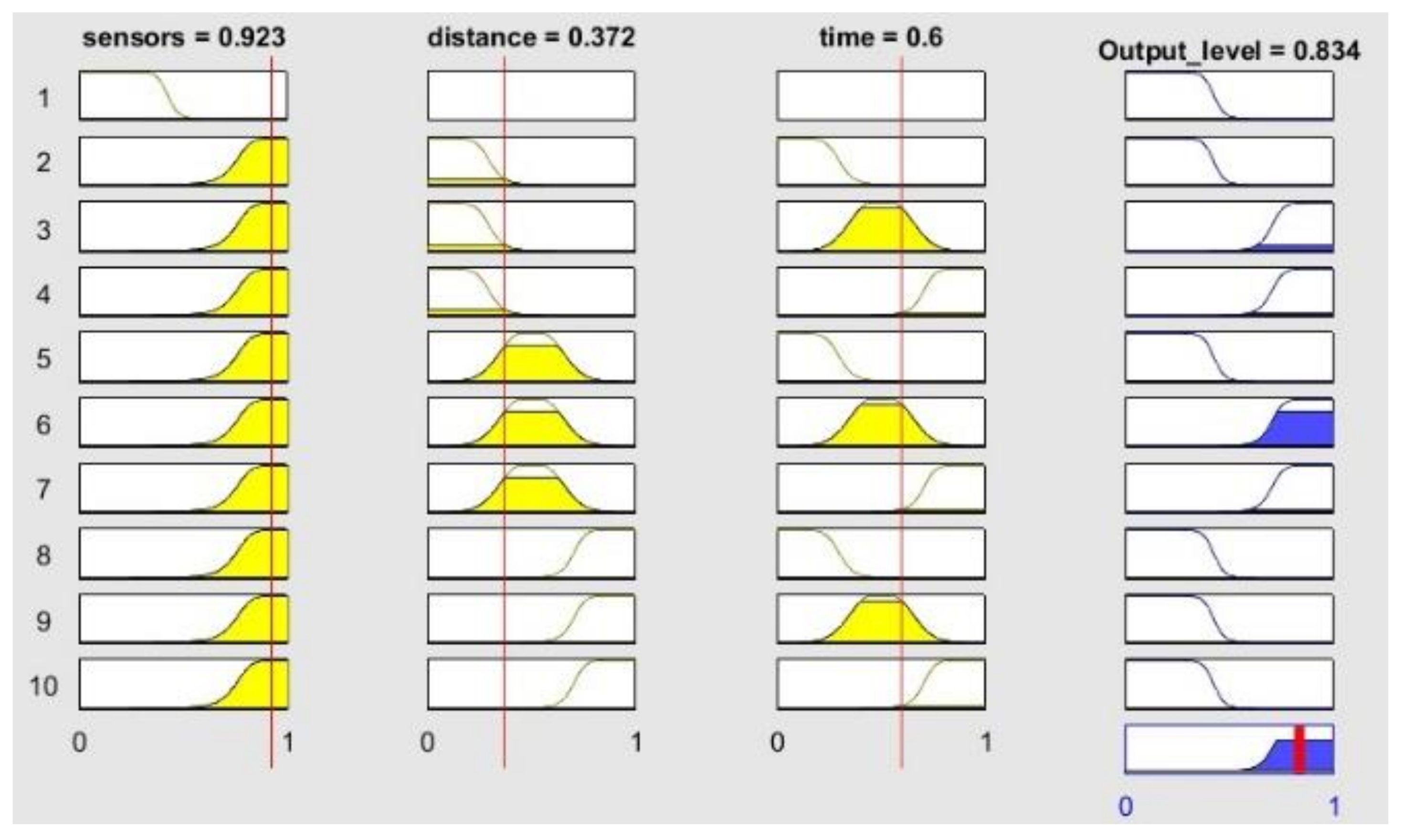
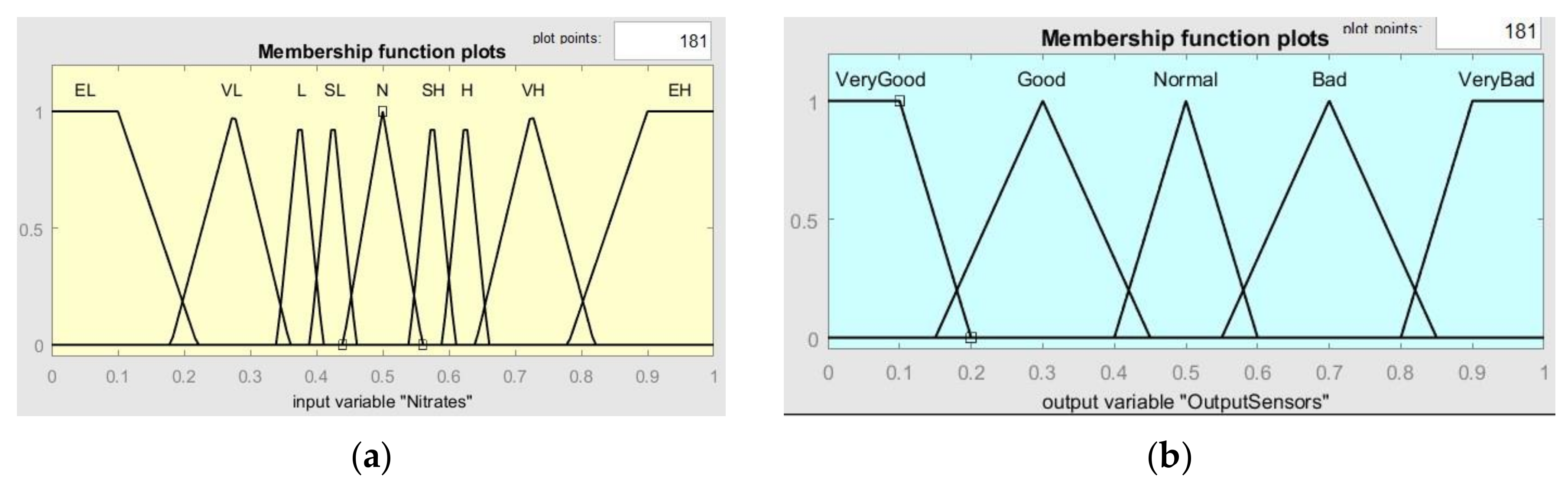
4.2. Classification Strategy of Areas of Interest
- -
- If the value of any of the inputs is EL or EH, then the output is VeryBad.
- -
- If there are no EL or EH values but there is at least one VL or VH value, then the output is Bad.
- -
- If there are no EL, EH, VL or VH values but there is at least one L or H value, then the output is Normal.
- -
- If there are no EL, EH, VL, VH, L or H values but there is at least one LL or LH value, then the output is Good.
- -
- If all input values are N, then the output is VeryGood.
4.3. Decisions Required to Navigate to the Area of Interest for Buoy-ASV Dual Operations
4.4. Simulations to Validate the Navigation Process and Fuzzy Zone Classification Algorithm
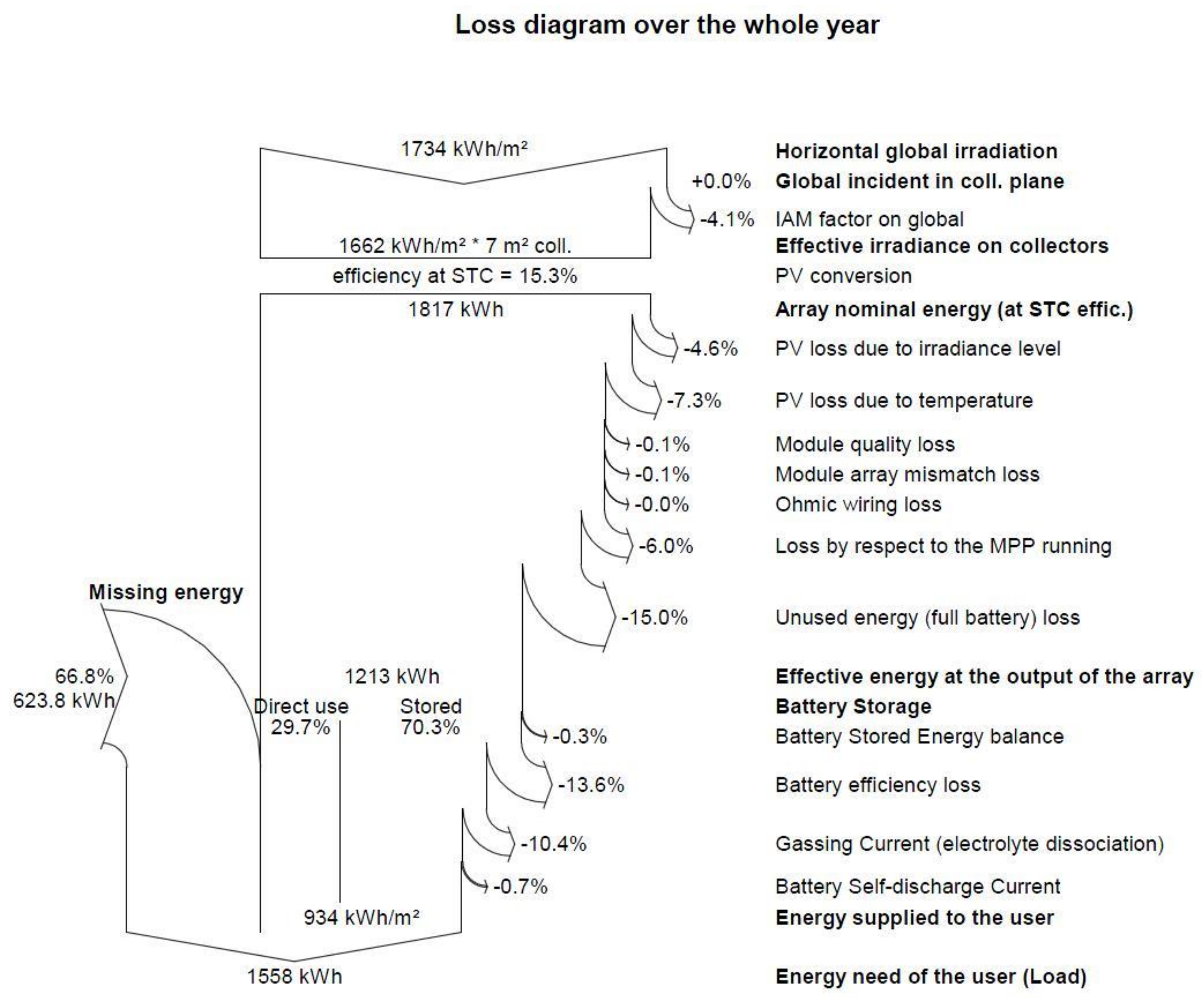
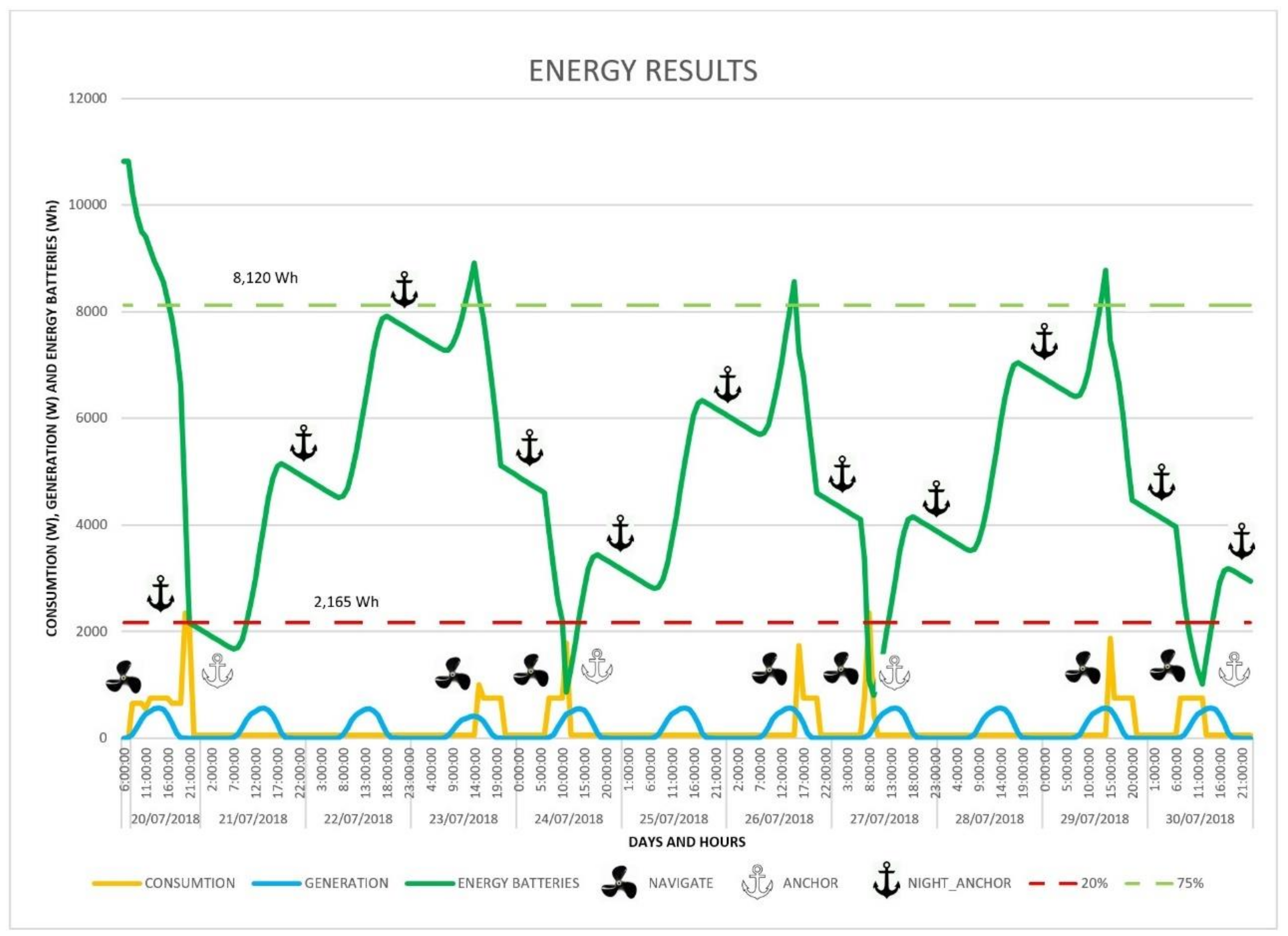
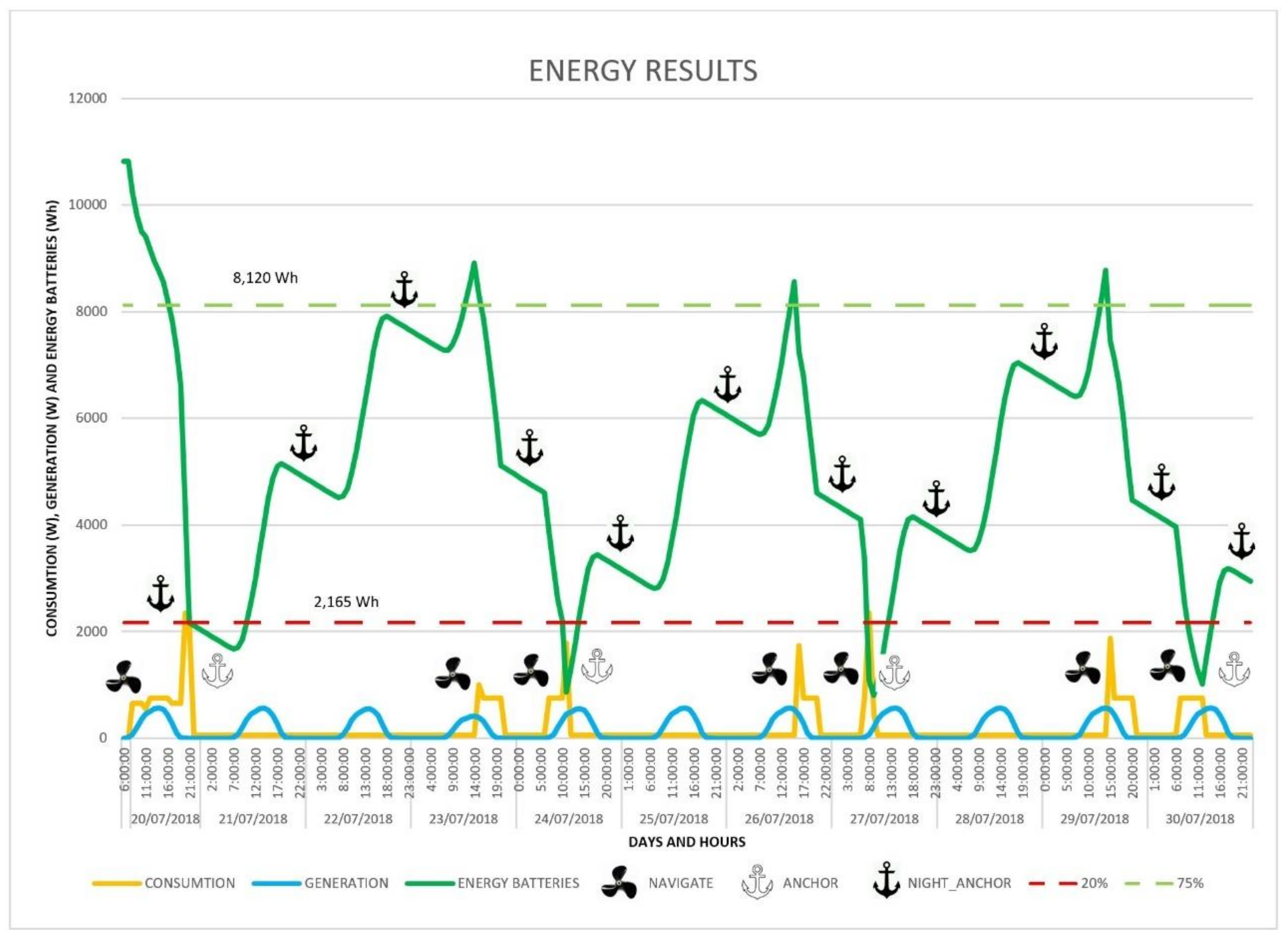
4.5. Energy Management Simulations
5. Experimental Tests and Results
6. Conclusions and Future Works
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- New Plastics Economy Initiative by the Ellen MacArthur Foundation. Available online: https://newplasticseconomy.org/ (accessed on 10 September 2018).
- European Strategy for Plastics by European Commission. Available online: http://ec.europa.eu/environment/waste/plastic_waste.htm (accessed on 10 September 2018).
- Albadalejo, C.; Soto, F.; Torres, R.; Jiménez, M.; López-Castejón, F.; Gilabert, J. Design and deployment of a wireless sensor network for the mar menor coastal observation system. IEEE J. Ocean. Eng. 2017, 42, 966–976. [Google Scholar]
- Albadalejo, C.; Sánchez, P.; Iborra, A.; Soto, F.; López, J.A.; Torres, R. Wireless sensor networks for oceanographic monitoring: A systematic review. Sensors 2010, 10, 6948–6968. [Google Scholar] [CrossRef] [PubMed]
- Knight, C.; Davidson, J.; Behrens, S. Energy Options for Wireless Sensor Nodes. Sensors 2008, 8, 8037–8066. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Senda, S.; Parra, L.; Lloret, J.; Jiménez, M. Oceanographic Multisensor Buoy Based on Low Cost Sensors for Posidonia Meadows Monitoring in Mediterranean Sea. J. Sens. 2015, 2015, 920168. [Google Scholar]
- Alippi, C.; Camplani, R.; Galperti, C.; Roveri, M. A Robust, Adaptative, Solar-Powered WSN Framework for Aquatic Environmental Monitoring. IEEE Sens. J. 2010, 11, 45–55. [Google Scholar] [CrossRef]
- Albadalejo, C.; Soto, F.; Torres, R.; Sánchez, P.; López, J.A. A Low-Cost Sensor Buoy System for Monitoring Shallow Marine Environments. Sensors 2012, 12, 9613–9634. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Special Issue on “Long Term Autonomy in Marine Robotics”. Auton. Robot. 2016, 40. Available online: https://link.springer.com/journal/10514/40/7/page/1 (accessed on 10 September 2018).
- Palomeras, N.; Carrera, A.; Hurtós, N.; Karras, G.C.; Bechlioulis, C.P.; Cashmore, M.; Magazzeni, D.; Long, D.; Fox, M.; Kyriakopoulos, K.J.; et al. Toward persistent autonomous intervention in a subsea panel. Auton. Robot. 2016, 40, 1279–1306. [Google Scholar] [CrossRef]
- Steinberg, M.; Stack, J.; Paluszkiewicz, T. Long duration autonomy for maritime systems: challenges and opportunities. Auton. Robot. 2016, 40, 1119–1122. [Google Scholar] [CrossRef] [Green Version]
- Carragher, P.; Hime, G.; Legh-Smith, P.; Mayville, J.; Nelson, R.; Pai, S.; Parnum, L.; Shone, P.; Smith, J.; Smith, C. A New Platform for Offshore Exploration and Production. Oilfield Rev. 2014, 25, 40–50. [Google Scholar]
- Ferri, G.; Cococcioni, M.; Alvarez, A. Mission Planning and Decision Support for Underwater Glider Networks: A Sampling on-Demand Approach. Sensors 2016, 16, 28. [Google Scholar] [CrossRef] [PubMed]
- Crimmins, D.M.; Patty, C.T.; Beliard, M.A.; Baker, J.; Jalbert, J.C.; Komerska, R.J.; Chappell, S.G.; Blidberg, D.R. Long-endurance test results of the solar-powered AUV system. In Proceedings of the OCEANS 2006, Boston, MA, USA, 17–21 September 2006. [Google Scholar]
- Codiga, D.L. A marine autonomous surface craft for long-duration, spatially explicit, multidisciplinary water column sampling in coastal and estuarine systems. J. Atmos. Ocean. Technol. 2015, 32, 627–641. [Google Scholar] [CrossRef]
- Niu, H.; Lu, Y.; Savvaris, A.; Tsourdos, A. Efficientet path planning algorithms for unmanned surface vehicle. IFAC-PapersOnLine 2016, 49, 121–126. [Google Scholar] [CrossRef]
- Dunbabin, M.; Grinham, A.; Udy, J. An autonomous surface vehicle for water quality monitoring. In Proceedings of the Australasian Conference on Robotics and Automation (ACRA), Sydney, Australia, 2–4 December 2009. [Google Scholar]
- Giodano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. Integrating sensors into a marine drone for bathymetric 3D surveys in shallow Waters. Sensors 2016, 16, 41. [Google Scholar] [CrossRef] [PubMed]
- Guerrero, A.; García-Córdoba, F.; Ortíz, F.J.; Alonso, D.; Gilabert, J. A multirobot platform based on autonomous surface and underwater vehicles with bio-inspired neurocontrollers for long-term oil spills monitoring. Auton. Robot. 2016, 40, 1321–1342. [Google Scholar] [CrossRef]
- Dunbabin, M. Autonomous greenhouse gas sampling using multiple robotic boats. Field Serv. Robot. 2016, 113, 17–30. [Google Scholar] [CrossRef]
- Aryani, D.R.; Kim, J.S.; Song, H. Suppression of PV output fluctuation using a battery energy storage system with model predictive control. Int. J. Fuzzy Logic Intell. Syst. 2017, 17, 202–209. [Google Scholar] [CrossRef]
- Ko, N.Y.; Jeong, S.; Bae, Y. Sine rotation vector method for attitude estimation of an underwater robot. Sensors 2016, 16, 1213. [Google Scholar] [CrossRef] [PubMed]
- Multi-Parametric Probe YSI 6600 V2 Datasheet. Available online: https://www.ysi.com///File%20Library/Documents/Specification%20Sheets/E52-6600V2.pdf (accessed on 5 October 2018).
- Climatic Data from the Region of Murcia Observatory. Available online: https://www.carm.es/web/integra.servlets.Blob?ARCHIVO=11.4%20Datos%20climatol%F3gicos%20de%20Murcia%202016.pdf&TABLA=ARCHIVOS&CAMPOCLAVE=IDARCHIVO&VALORCLAVE=1913&CAMPOIMAGEN=ARCHIVO&IDTIPO=60&RASTRO=c1415$m1174,1381 (accessed on 5 October 2018).
- Blue Flag Site. Available online: http://www.blueflag.global/beaches2/ (accessed on 5 October 2018).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PV Modules: Enecom Italia, HF130 | Batteries: Lithium-Manganese, Torqeedo, Power 26–104 | ||
|---|---|---|---|
| Solar power | 130 (Wp) | Voltage | 25.9 (V) |
| Voc | 20.01 (V) | Nominal load | 104 (Ah) |
| Vmpp | 16.86 (V) | Total units | 4 batteries (2 series/2 parallel) |
| Isc | 8.61 (A) | Total energy stored | 10,740 kWh |
| Impp | 8.10 (A) | ||
| Total units | 8 modules (4 series/2 parallel) | ||
| Total power | 1040 Wp | ||
|
|
| |
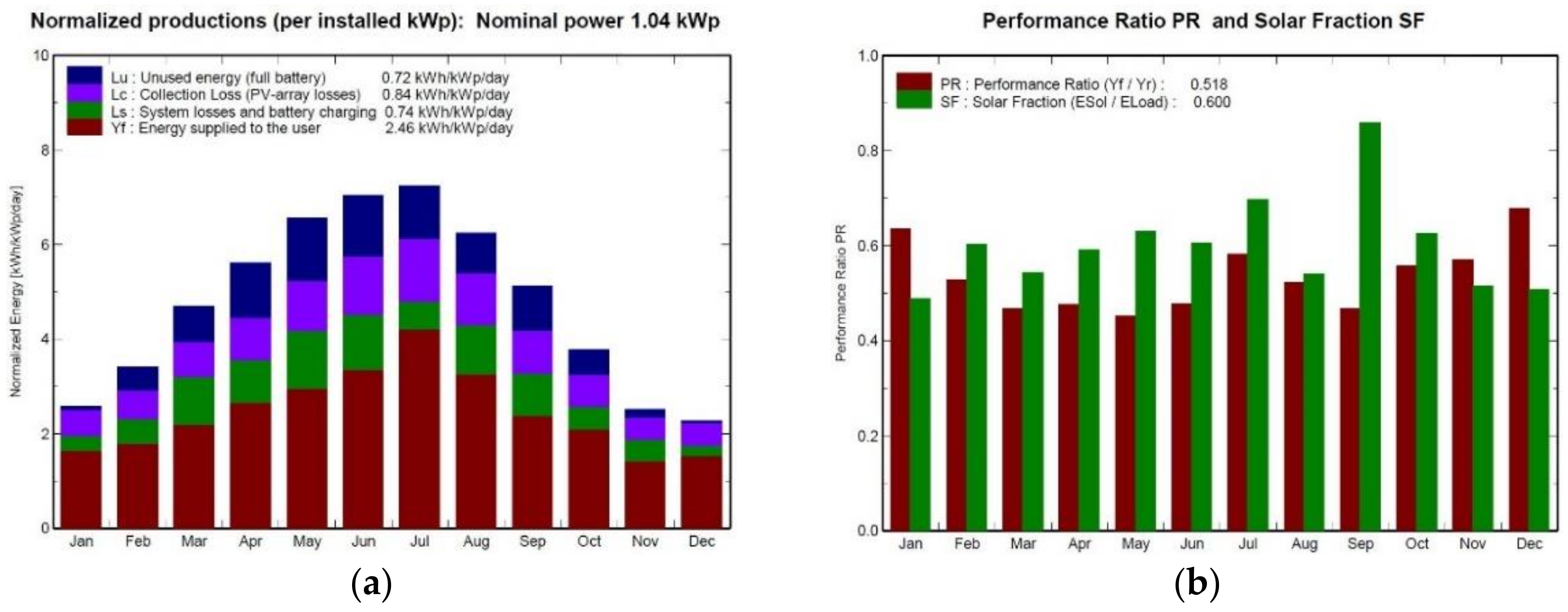
| Annual Recharges | Energy for Recharging | Annual Power Requirements | Useful Solar Power | Energy Gap | Performance Ratio (PR) |
|---|---|---|---|---|---|
| 143 | 10.816 kWh | 1558 kWh | 934 kWh/year | 624 kWh | 51.8% |
| Season | Daily Exploration Periods | Recharging Periods | Night Anchorage Periods |
|---|---|---|---|
| Summer | 07:00–08:00 12:00–14:00 18:00–20:00 | 08:00–12:00 14:00–18:00 20:00–21:00 | 21:00–07:00 |
| Spring | 08:00–09:00 12:00–14:00 | 09:00–12:00 14:00–19:00 | 19:00–08:00 |
| Autumn | 07:30–09:30 12:00–14:00 | 09:30–12:00 14:00–19:30 | 19:30–07:30 |
| Winter | 08:30–09:30 12:00–14:00 | 09:30–12:00 14:00–17:00 | 17:00–08:30 |
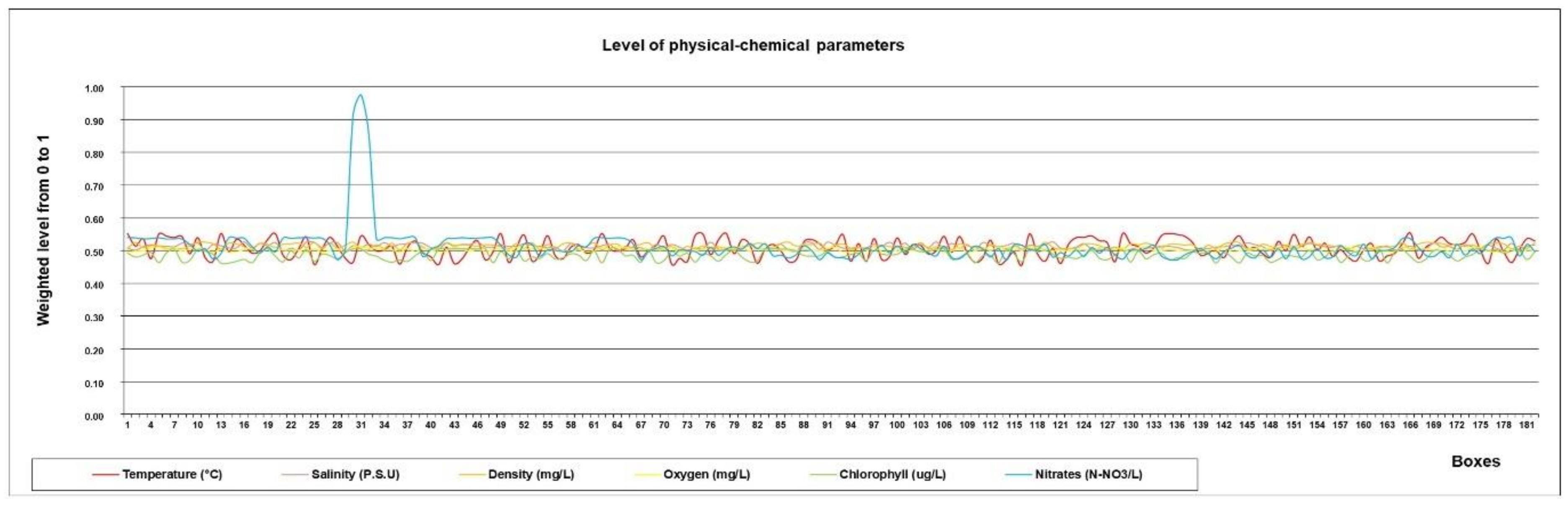
| Data | Average Value |
|---|---|
| Temperature | 21.75 °C |
| Salinity | 42.25 P.S.U |
| Density | 0.12 mg/L |
| Oxygen | 6.84 mg/L |
| Chlorophyll | 2.28 µg/L |
| Nitrates | 0.98 mg N-NO3-/L |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-Reolid, I.; Molina-Molina, J.C.; Guerrero-González, A.; Ortiz, F.J.; Alonso, D. An Autonomous Solar-Powered Marine Robotic Observatory for Permanent Monitoring of Large Areas of Shallow Water. Sensors 2018, 18, 3497. https://doi.org/10.3390/s18103497
González-Reolid I, Molina-Molina JC, Guerrero-González A, Ortiz FJ, Alonso D. An Autonomous Solar-Powered Marine Robotic Observatory for Permanent Monitoring of Large Areas of Shallow Water. Sensors. 2018; 18(10):3497. https://doi.org/10.3390/s18103497
Chicago/Turabian StyleGonzález-Reolid, I., J. Carlos Molina-Molina, A. Guerrero-González, F. J. Ortiz, and D. Alonso. 2018. "An Autonomous Solar-Powered Marine Robotic Observatory for Permanent Monitoring of Large Areas of Shallow Water" Sensors 18, no. 10: 3497. https://doi.org/10.3390/s18103497