Economical High–Low Temperature and Heading Rotation Test Method for the Evaluation and Optimization of the Temperature Control System for High-Precision Platform Inertial Navigation Systems


Abstract
:1. Introduction
2. Temperature Control Systems of INSs
2.1. Typical Temperature Control System of INSs
2.2. Temperature Control System of Our INS
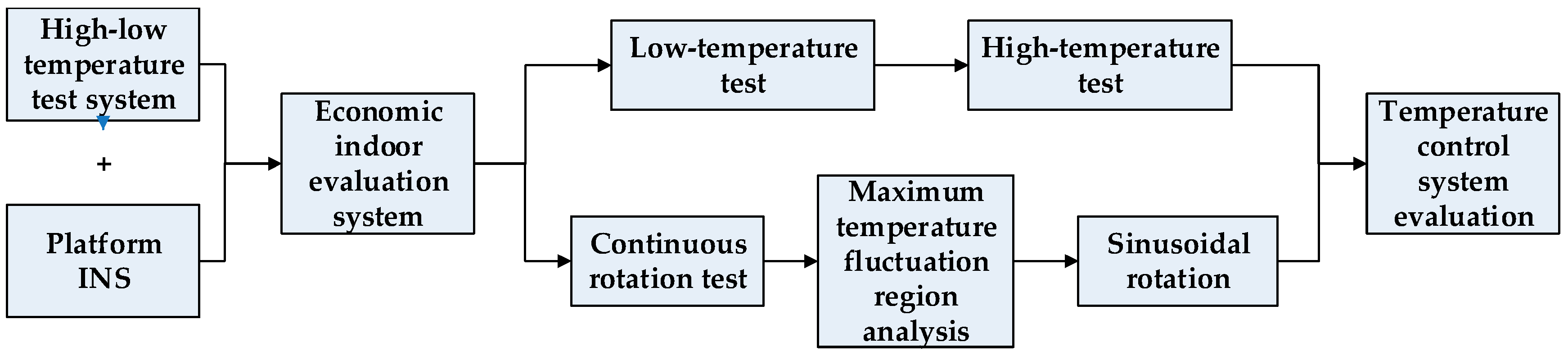
3. Evaluation System of Temperature Control System
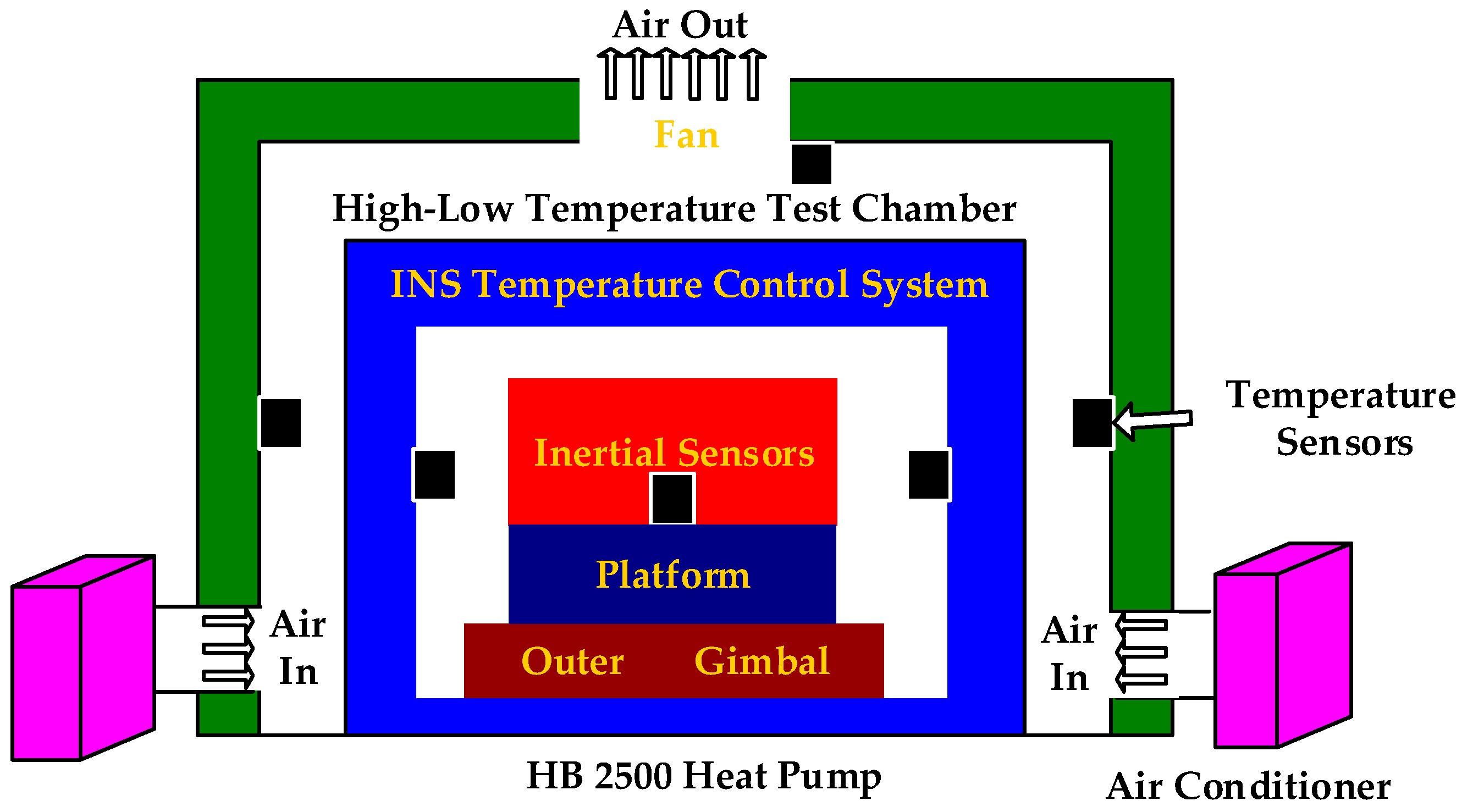
3.1. High–Low Temperature Test Method
3.2. Heading Rotation Test Method
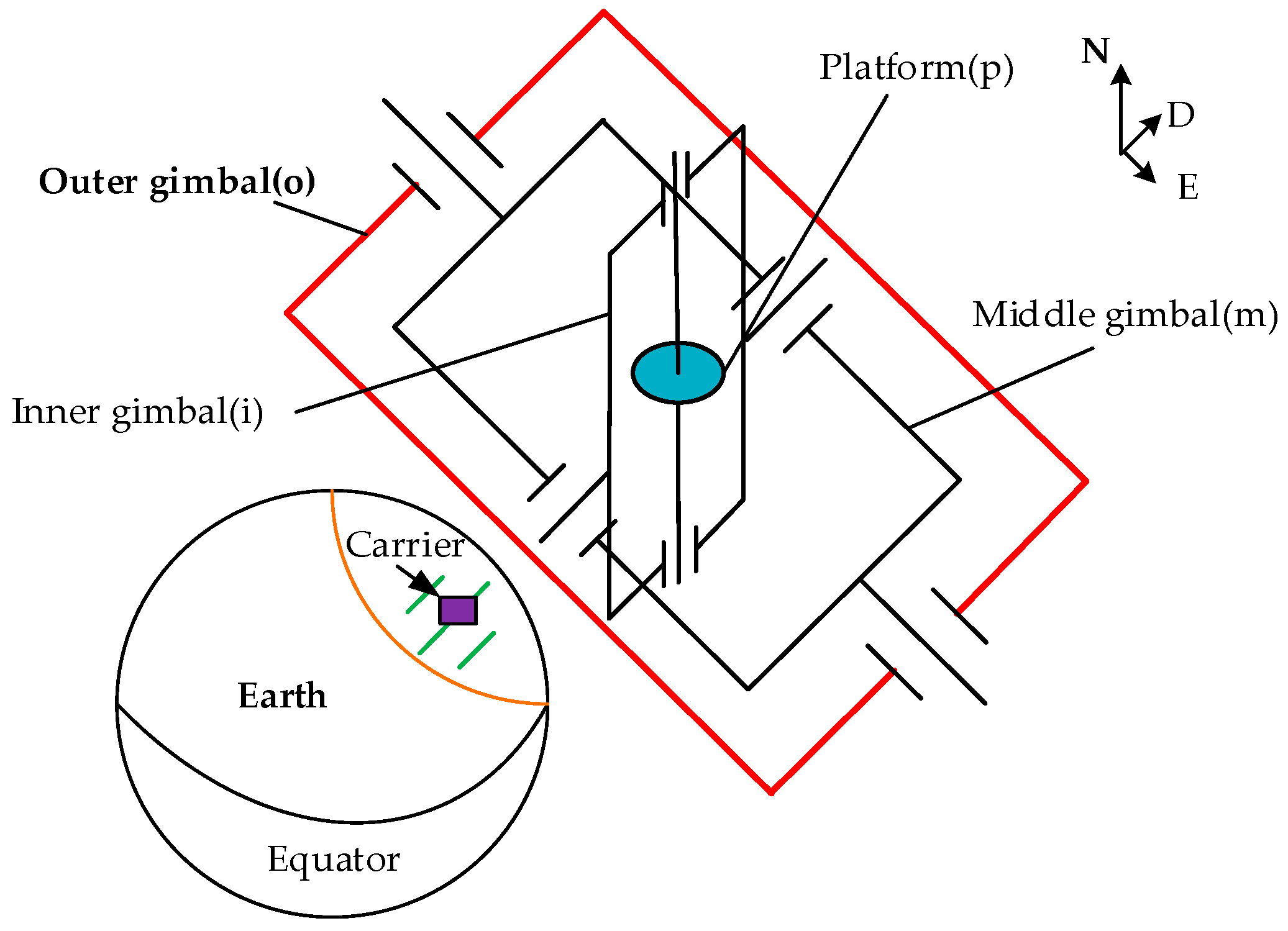
3.2.1. Derivation of the Principle of Heading Rotation
3.2.2. Outer Gimbal Rotation Test Procedure
4. Evaluation Process for a High-Precision Platform INS
4.1. Long-Term High–Low Temperature Test
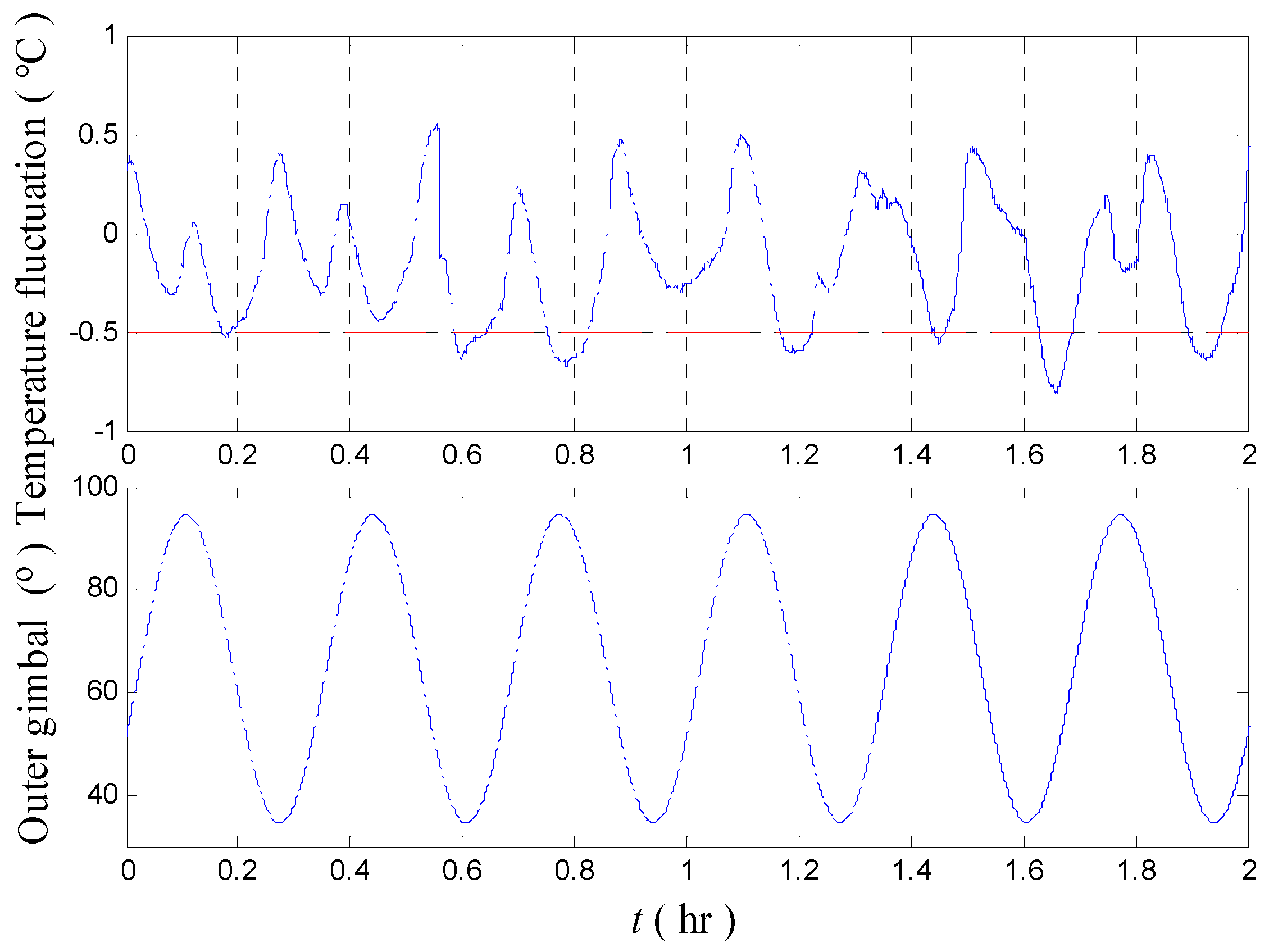
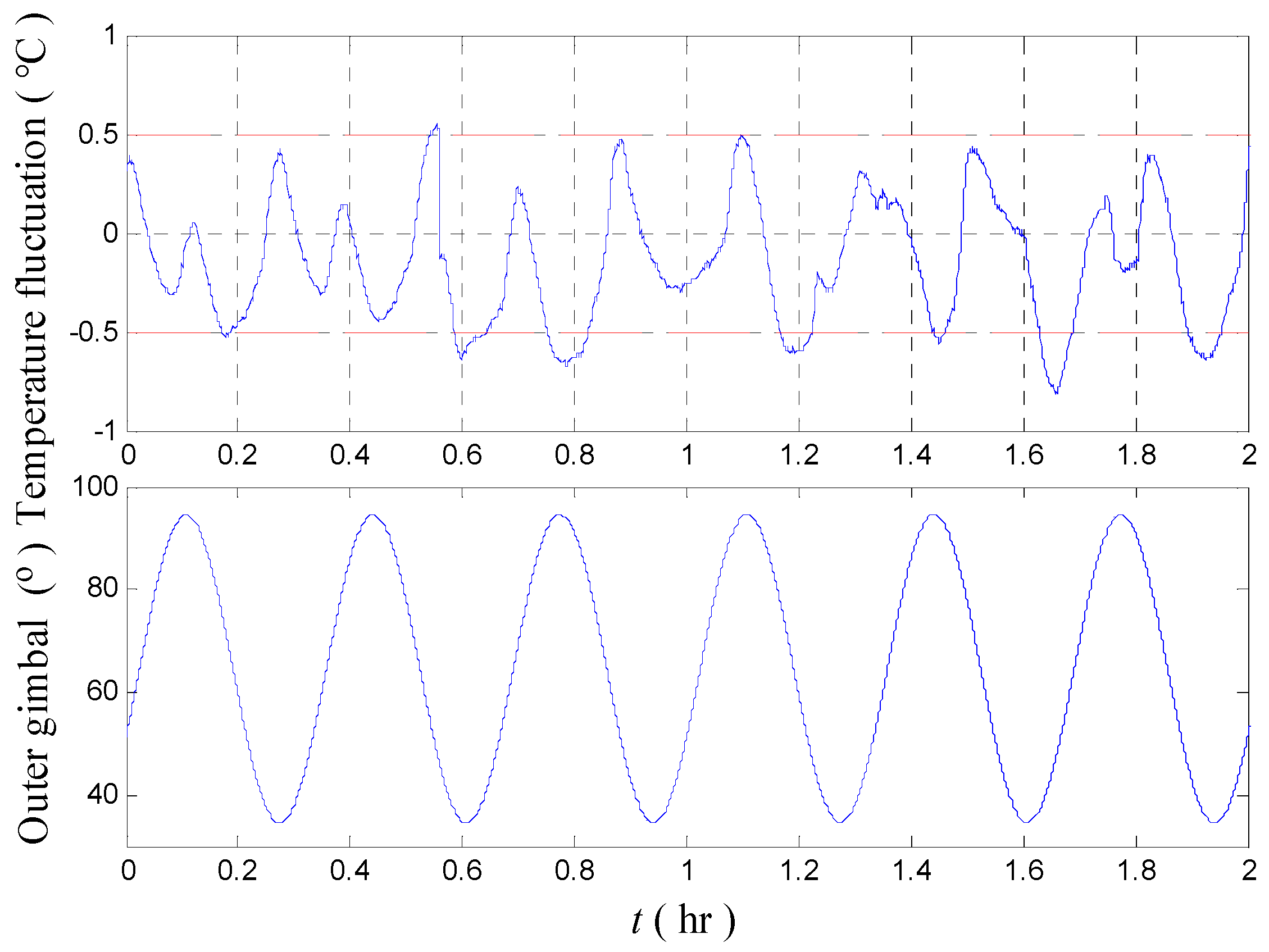
4.2. Short-Term Heading Rotation Test
5. Optimization of the Temperature Control System of the INS above
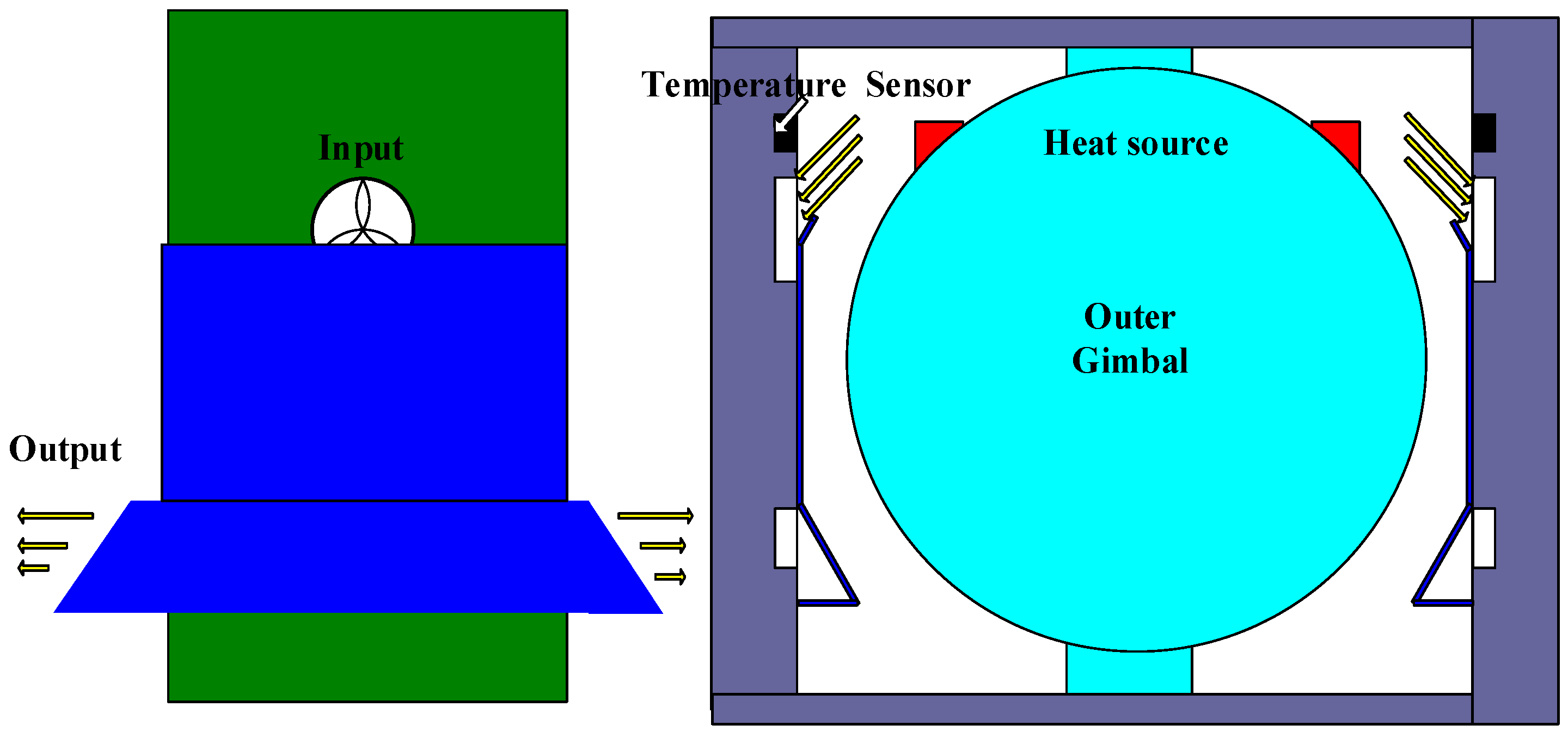
5.1. Analysis for Excessive Temperature Fluctuation
5.2. Optimization of the Temperature Control System
6. Experimental Results after Evaluation System and Optimization
6.1. Temperature of Inertial Sensors
6.2. Temperature of Temperature Control System
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tal, A.; Klein, I.; Katz, R. Inertial navigation system/Doppler velocity log (INS/DVL) fusion with partial DVL measurements. Sensors 2017, 17, 415. [Google Scholar] [CrossRef] [PubMed]
- Du, S. A micro-electro-mechanical-system-based inertial system with rotating accelerometers and gyroscopes for land vehicle navigation. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef]
- Fu, Q.W.; Liu, Y.; Liu, Z.B.; Li, S.H.; Guan, B.F. Autonomous in-motion alignment for land vehicle strapdown inertial navigation system without the aid of external sensors. J. Navig. 2018, 1–17. [Google Scholar] [CrossRef]
- Bryne, T.H.; Fossen, T.I.; Johansen, T.A. Design of inertial navigation systems for marine craft with adaptive wave filtering aided by triple-redundant sensor packages. Int. J. Adapt. Control Signal Process. 2017, 31, 522–544. [Google Scholar] [CrossRef]
- Yan, Z.P.; Wang, L.; Zhang, W.; Zhou, J.J.; Wang, M. Polar grid navigation algorithm for unmanned underwater vehicles. Sensors 2017, 17, 1599. [Google Scholar]
- Yang, S.J.; Yang, G.L.; Zhu, Z.L.; Li, J. Stellar refraction-based SINS/CNS integrated navigation system for aerospace vehicle. J. Aerosp. Eng. 2015, 29, 04015051. [Google Scholar] [CrossRef]
- Wang, H.G.; Williams, T.C. Strategic inertial navigation systems-high-accuracy inertially stabilized platforms for hostile environments. IEEE Control Syst. Mag. 2008, 28, 65–85. [Google Scholar]
- Eldiasty, M.; Elrabbany, A.; Pagiatakis, S. Temperature variation effects on stochastic characteristics for low-cost MEMS-based inertial sensor error. Meas. Sci. Technol. 2007, 18, 3321–3328. [Google Scholar] [CrossRef]
- Zhang, Y.S.; Wang, Y.Y.; Yang, T.; Yin, R.; Fang, J.C. Dynamic angular velocity modeling and error compensation of one-fiber fiber optic gyroscope (OFFOG) in the whole temperature range. Meas. Sci. Technol. 2012, 23, 025101. [Google Scholar] [CrossRef]
- Fang, J.C.; Li, J.L. Integrated model and compensation of thermal errors of silicon microelectromechanical gyroscope. IEEE Trans. Instrum. Meas. 2009, 58, 2923–2930. [Google Scholar] [CrossRef]
- Chung, H.; Ojeda, L.; Borenstein, J. Accurate Mobile Robot Dead-reckoning with a Precision-calibrated Fiber Optic Gyroscope. IEEE Trans. Rob. Autom. 2001, 17, 80–84. [Google Scholar] [CrossRef]
- Prikhodko, I.P.; Trusov, A.A.; Shkel, A.M. Compensation of drifts in high-Q MEMS gyroscopes using temperature self-sensing. Sens. Actuators A Phys. 2013, 201, 517–524. [Google Scholar] [CrossRef]
- Yang, H.T.; Zhou, B.; Wang, L.X.; Xing, H.F.; Zhang, R. A novel tri-axial MEMS gyroscope calibration method over a full temperature range. Sensors 2018, 18, 3004. [Google Scholar] [CrossRef] [PubMed]
- Dzhashitov, V.E.; Pankratov, V.M.; Golikov, A.V. Mathematical simulation of temperature field control of the strapdown inertial navigation system based on optical fiber sensors. J. Mach. Manuf. Reliab. 2014, 43, 75–81. [Google Scholar] [CrossRef]
- Li, J.; He, H.F.; Hu, C.H. Design of the temperature detecting and control system of the inertia platform based on virtual instrument. In Proceedings of the 8th International Conference on Electronic Measurement & Instruments, Xi’an, China, 16–18 August 2007; pp. 309–313. [Google Scholar]
- Levinson, E.; Majure, R. Accuracy enhancement techniques applied to the marine ring laser inertial navigator (MARLIN). Navigation 1987, 34, 64–86. [Google Scholar] [CrossRef]
- Karachun, V.; Mel’Nick, V.; Korobiichuk, I.; Nowicki, M.; Szewczyk, R.; Kobzar, S. The additional error of inertial sensors induced by hypersonic flight conditions. Sensors 2016, 16, 299. [Google Scholar] [CrossRef] [PubMed]
- Giordano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. Integrating sensors into a marine drone for bathymetric 3D surveys in shallow waters. Sensors 2016, 16, 41. [Google Scholar] [CrossRef] [PubMed]
- Zhu, W.B.; Wallace, C.S.; Yazdi, N. A tri-fold inertial measurement unit fabricated with a batch 3-D assembly process. In Proceedings of the 2016 IEEE International Symposium on Inertial Sensors and Systems, Laguna Beach, CA, USA, 22–28 February 2016; pp. 70–73. [Google Scholar]
- Cao, J.L.; Wang, M.H.; Cai, S.K.; Zhang, K.D.; Cong, D.N.; Wu, M.P. Optimized design of the SGA-WZ strapdown airborne gravimeter temperature control system. Sensors 2015, 15, 29984–29996. [Google Scholar] [CrossRef] [PubMed]
- Dzhashitov, V.E.; Pankratov, V.M. Control of temperature fields of a strapdown inertial navigation system based on fiber optic gyroscopes. J. Comput. Syst. Sci. Int. 2014, 53, 565–575. [Google Scholar] [CrossRef]
- Li, H.C.; Chen, F.; Dong, Y. Online monitoring of a sealed air-cooling constant temperature control apparatus. Meas. Control 2012, 45, 280–285. [Google Scholar] [CrossRef]
- Xia, D.Z.; Kong, L.; Hu, Y.W.; Ni, P.Z. Silicon microgyroscope temperature prediction and control system based on BP neural network and Fuzzy-PID control method. Meas. Sci. Technol. 2015, 26, 025101. [Google Scholar] [CrossRef]
- Mironova, A.; Mercorelli, P.; Zedler, A. A multi input sliding mode control for Peltier Cells using a cold-hot sliding surface. J. Frankl. Inst. 2018. [Google Scholar] [CrossRef]
- Mironova, A.; Mercorelli, P.; Zedler, A. Thermal disturbances attenuation using a Lyapunov controller for an ice-clamping device actuated by thermoelectric coolers. Therm. Sci. Eng. Prog. 2018, 6, 290–299. [Google Scholar] [CrossRef]
- Mironova, A.; Mercorelli, P.; Zedler, A. Lyapunov control strategy for thermoelectric cooler activating an ice-clamping system. J. Therm. Sci. Eng. Appl. 2018, 10, 041020. [Google Scholar] [CrossRef]
- Li, B.; Liu, J.; Chen, W. Heading effect error of hemisphere resonator gyro platform. Electron. Opt. Control 2016, 23, 65–70. (In Chinese) [Google Scholar]
- Liu, X.X.; Xu, X.S.; Zhao, Y.; Wang, L.H.; Liu, Y.T. An initial alignment method for strapdown gyrocompass based on gravitational apparent motion in inertial frame. Measurement 2014, 55, 593–604. [Google Scholar] [CrossRef]
- Hu, P.D.; Wang, S.Y.; Zhang, R.; Liu, X.X.; Xu, B. Fast heading-rotation-based high-accuracy misalignment angle estimation method for INS and GNSS. Measurement 2017, 102, 208–213. [Google Scholar] [CrossRef]
- Song, N.F.; Cai, Q.Z.; Yang, G.L.; Yin, H.L. Analysis and calibration of the mounting errors between inertial measurement unit and turntable in dual-axis rotational inertial navigation system. Meas. Sci. Technol. 2013, 24, 115002. [Google Scholar] [CrossRef]
- Kamer, Y.; Ikizoglu, S. Effective accelerometer test beds for output enhancement of an inertial navigation system. Measurement 2013, 46, 1641–1649. [Google Scholar] [CrossRef]
- Levinson, E.; Erickson, G. The MK39-A marine strapdown laser gyrocompass for the nineties. In Proceedings of the National Technical Meeting of the Institute of Navigation, Phoenix, AZ, USA, 22–24 January 1991; pp. 309–312. [Google Scholar]
- Lahham, J.I.; Brazell, J.R. Acoustic noise reduction in the MK 49 ship’s inertial navigation system (SINS). In Proceedings of the IEEE PLANS 92 Position Location and Navigation Symposium Record, Monterey, CA, USA, 23–27 March 1992; pp. 32–39. [Google Scholar]
- Tucker, T.; Levinson, E. The AN/WSN-7B Marine Gyrocompass/Navigator. In Proceedings of the National Technical Meeting of the Institute of Navigation, Anaheim, CA, USA, 26–28 January 2000; pp. 348–357. [Google Scholar]
- Zhang, L.; Xie, T.H.; Chen, G.; Huang, S.T. Summarize of the Evolution of Marine Inertial Navigation System. Navig. Control 2010, 9, 71–79. (In Chinese) [Google Scholar]
- Thakor, M.D.; Hadia, S.K.; Kumar, A. Precise temperature control through Thermoelectric Cooler with PID controller. In Proceedings of the 2015 International Conference on Communication and Signal Processing, Melmaruvathur, India, 2–4 April 2015; pp. 1118–1122. [Google Scholar]
- Li, H.; Gao, Z.; Zhang, R.; Han, F. Kinematic analysis of a four-gimbal space-stable platform and calculation of the motor torque. J. Tsinghua Univ. 2007, 47, 635–639. (In Chinese) [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rotation Process | Total Angle (°) | Excessive Fluctuation |
|---|---|---|
| 360–270° | 90 | No |
| Pause | 0 | No |
| 270–180° | 90 | Yes |
| Pause | 0 | No |
| 180–0° | 180 | Yes |
| INS Number | Angle Mean Value (°) | Rotational | Temperature | ||
|---|---|---|---|---|---|
| Amplitude (°) | Period (s) | Maximum Fluctuation (°C) | Excessive Fluctuation | ||
| INS 1# | 64.5 | 30 | 1200 | −0.8125 | Yes |
| 64.5 + 180 | −0.7813 0.5625 | ||||
| 64.5 + 90 | <0.4500 | No | |||
| 64.5 + 270 | |||||
| INS 2# | 64.5 | −0.8125 | Yes | ||
| 64.5 + 180 | −0.7750 0.6563 | ||||
| 64.5 + 90 | <0.4500 | No | |||
| 64.5 + 270 | |||||
| Test Method | Subject Tested | Ambient Temperature | Performance Parameters | Test Results | |
|---|---|---|---|---|---|
| Before Optimization (°C) | After Optimization (°C) | ||||
| High–low temperature test | Gyro 1# | High temperature 1 | Average bias | 0.2404 | 0.1155 |
| Maximum bias | 0.61 | 0.54 | |||
| Maximum fluctuation difference | 1.4 | 0.5 | |||
| Low temperature 2 | |||||
| Average bias | 1.2187 | 0.2651 | |||
| Maximum bias | 1.5 | 1.0 | |||
| Gyro 2# | High temperature | Average bias | 0.2039 | 0.1864 | |
| Maximum bias | 0.7 | 0.5 | |||
| Maximum fluctuation difference | 1.5 | 0.5 | |||
| Low temperature | |||||
| Average bias | 1.2580 | 0.4584 | |||
| Maximum bias | 1.5 | 1.0 | |||
| Heading rotation test | Temperature control system | Normal temperature 3 | Standard deviation | 0.2942 | 0.1096 |
| Maximum fluctuation | −0.8125 | −0.2656 | |||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Q.; Zhang, R.; Li, H. Economical High–Low Temperature and Heading Rotation Test Method for the Evaluation and Optimization of the Temperature Control System for High-Precision Platform Inertial Navigation Systems. Sensors 2018, 18, 3967. https://doi.org/10.3390/s18113967
Yang Q, Zhang R, Li H. Economical High–Low Temperature and Heading Rotation Test Method for the Evaluation and Optimization of the Temperature Control System for High-Precision Platform Inertial Navigation Systems. Sensors. 2018; 18(11):3967. https://doi.org/10.3390/s18113967
Chicago/Turabian StyleYang, Qiang, Rong Zhang, and Haixia Li. 2018. "Economical High–Low Temperature and Heading Rotation Test Method for the Evaluation and Optimization of the Temperature Control System for High-Precision Platform Inertial Navigation Systems" Sensors 18, no. 11: 3967. https://doi.org/10.3390/s18113967